Concepts of stress and strain 440_516... · Concepts of stress and strain Extreme values of shear...
32
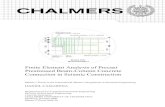
P F F s F N Plane Q positive side negative side area A Concepts of stress and strain Stress at a point
Transcript of Concepts of stress and strain 440_516... · Concepts of stress and strain Extreme values of shear...

P
F
Fs
FN
Plane Q
positive side
negative side
area A
Concepts of stress and strain
Stress at a point

σxx
σxy
σxz
x
yz
For the cube face in the–x direction, we have
stresses:
σ-x-z
σ-x-y
σ-x-x
Stress tensor
Concepts of stress and strain
σ =
σ xx σ xy σ xz
σ yx σ yy σ yz
σ zx σ zy σ zz
⎛
⎝
⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟

In general, we can define the stress vector acting on an arbitrary plane with direction cosines la1,la2, la3 referredtoThe x, y, z coordinate system. The arbitrary plane is defined in terms of its unit normal direction;
1 2 3ˆˆ ˆˆ l i l j l ka a aa = + +
Stress vector on an arbitrary plane
1 11 1 21 2 31 3
2 12 1 22 2 32 3
3 13 1 23 2 33 3
l l ll l ll l l
a a a a
a a a a
a a a a
s s s ss s s ss s s s
= + +
= + +
= + +
Concepts of stress and strain
α
x1
x2x3
θ
α
lα 2 = cosθα 2

Transformation of the components of a vectorIf a vector has components, a1, a2, a3 referred to a set of coordinates x1, x2, x3 it can be shown that the components referred to a transformed set of coordinates are:
a1' = l1'1a1 + l1'2a2 + l1'3a3a2' = l2'1a1 + l2'2a2 + l2'3a3a3' = l3'1a1 + l3'2a2 + l3'3a3
α i ' = li ' ja jj=1
3
∑ ≡ li ' ja j

Transformation of stress components: suppose we have the stress components inone coordinate system (x, y, z) and we want to get the components in another (say rotated)coordinate system (x�, y�, z�):
1'1' 11 1'1 1'1 21 1'2 1'1 31 1'3 1'1
12 1'1 1'2 22 1'2 1'2 32 1'3 1'2
13 1'1 1'3 23 1'2 1'3 33 1'3 1'3
l l l l l l + l l l l l l + l l l l l l
s s s ss s ss s s
= + +
+ +
+ +
Concepts of stress and strain
σ i ' j ' = σ ijli 'il j ' jj=1
3
∑i=1
3
∑ ≡σ ijli 'il j ' j

Concepts of stress and strain
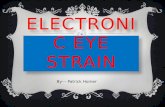
In testing single crystals in the form of wires or cylinders it is possible to apply a single normal component of stress, , as shown at left. The plastic deformation depends on a particular shear component of stress referred to a particular crystallographic direction on a particular crystallographic plane. Application of the transformation equation shows that the shear stress on the 3’ plane in the 2’ direction, , can be expressed in terms of the applied stress, , and the angles and .
σ 33
σ 33
σ 3'2' φ λ
σ 3'2' =σ 33 cos(φ)cos(λ)
x1
x2
x3
x1’
x2’
x3’
Slip plane
Slip plane normal
Slip direction

Principal stresses and stress invariants
For any general state of stress at a point P, there exists 3 mutually perpendicular planes on which the shear stressesVanish. The resulting stresses on these planes are normal stresses and are called principal stresses (Eigen values) andThe normal directions defining these planes are called principal directions (Eigen vectors). These principal directionscan be referred to a coordinate system (x, y, z) in space.
Concepts of stress and strain
A

The condition for a non trivial solution to exist is given by the so-called characteristic equation:
( )( )
( )
11 12 13
21 22 23
31 32 33
0s s s ss s s ss s s s
-- =
-
This results in a cubic equation that can be solved for the 3 roots (sI, sII, sIII) corresponding to the 3 principal stresses. The principal directions can be solved by substituting separately each of the principal stresses into the set on linear equations and solving for the direction cosines subject to the condition that;
2 2 21 2 3 1l l la a a+ + =
Concepts of stress and strain

Concepts of stress and strainExpanding the determinant yields a cubic equation in !:
σ 3 − I1σ2 + I2σ − I3 = 0
where,I1 =σ 11 +σ 22 +σ 33
I2 =σ 22σ 33 +σ 33σ 11 +σ 11σ 22 −σ 232 −σ 12
2 −σ 132
I3 =σ 11 σ 12 σ 13
σ 12 σ 22 σ 23
σ 13 σ 23 σ 33

Concepts of stress and strainσ 3 − I1σ
2 + I2σ − I3 = 0This cubic equation has 3 roots, !", !$, and !% and by convention
These roots are the principle stresses and are independent of the orientation
of the coordinate axis. It follows that the I - coefficients are independent of the choice of axis andso are called “invariants”. Once the principal stresses are determined, the direction cosines definingthe principal axes are determined by the set of equations, A and the condition that
lα12 + lα 2
2 + lα 32 = 1.
σ 1 >σ 2 >σ 3.

Concepts of stress and strainExtreme values of shear stress
It can be shown using the method of Lagrange multipliers that in terms of the principal stresses the shear stressesare:
Largest shear stress
±1/ 2 σ 1 −σ 2( )±1/ 2 σ 2 −σ 3( )±1/ 2 σ 1 −σ 3( )
These shears stresses are on planes inclined at 45o with respect to the principal planes.

Concepts of stress and strain
Experimentally it has been found that plastic deformation of many solids is essentially independent ofThe mean stress,
σ m =σ 11 +σ 22 +σ 33
3=σ 1 +σ 2 +σ 3
3= 1/ 3I1
Most plasticity theories argue that plastic deformation is related to the part of the stress tensor unrelatedto !", called the deviator stress, !$,
σ d =σ −σ m.
σ d =
2σ 11 −σ 22 −σ 33
3σ 12 σ 13
σ 12
2σ 22 −σ 11 −σ 33
3σ 23
σ 13 σ 23
2σ 33 −σ 11 −σ 11
3
⎛
⎝
⎜⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟⎟

Concepts of stress and strainStrain at a point (small displacements):
u + ∂u
∂x u
A
A*
B
B*
dx + ∂u
∂xdx
P
dx
1-D strain
ex =
ΔLL
= A* B *−ABdx
ex =dx + ∂u
∂xdx
⎛⎝⎜
⎞⎠⎟− dx
dx= ∂u∂x

Concepts of stress and strainMore generally, the displacement, u, in the x-direction will also depend on they and z coordinates of a point under a more general deformation, i.e.,
Similar expressions can be written for the displacement in the y-direction, v, andz-direction w.
u = ∂u
∂xx + ∂u
∂yy + ∂u
∂zz = exxx + exy y + exz z
w = ∂w
∂xx + ∂w
∂yy + ∂w
∂zz = ezxx + ezy y + ezz z
v = ∂v
∂xx + ∂v
∂yy + ∂v
∂zz = eyxx + eyy y + eyz z

Concepts of stress and strain
∂ui
∂x j
; i ≠ jThe terms that look like Can Involve not only a deformation strain
but also a rigid-body rotation.
Pure shear Pure rotationwith no shear
simple shear
ε xy = ε yx ε xy = −ε yx ε xy ; ε yx = 0

Concepts of stress and strainThe 9 relative displacement components can be decomposed into a symmetric partdefining the strain tensor and a rotation tensor, i.e., eij = ε ij +ω ij
ε ij =
12
∂ui
∂x j
+∂uj
∂xi
⎛
⎝⎜
⎞
⎠⎟ ω ij =
12
∂ui
∂x j
−∂uj
∂xi
⎛
⎝⎜
⎞
⎠⎟
The strain tensor transforms the same way as the stress tensor and all 2nd ordersymmetric tensors.

Concepts of stress and strainVery often, the shear strain is expressed as engineeringshearstrain, γ.
γ ij = 2ε ij =
∂ui
∂x j
+∂uj
∂xi
⎛
⎝⎜
⎞
⎠⎟ ;i ≠ j
However, be careful. since this form of shear stain does not transform thesame way as a symmetric 2nd order tensor.

Both are symmetric 2nd order tensors. This means that σ ij and ε ij σ ij =σ ji and ε ij = ε ji .
This means that there are 6 independent components of stress and 6 independent components of strain. SinceThe relation between stress and strain is linear the stress may be written in terms of constants of proportionalityC, as:
σ 11 = C11ε11 +C12ε22 +C13ε33 +C14γ 23 +C15γ 31 +C16γ 12
σ 22 = C21ε11 +C22ε22 +C23ε33 +C24γ 23 +C25γ 31 +C26γ 12
σ 33 = C31ε11 + .... +C34γ 23 + .... +C36γ 12
σ 23 = C41ε11 +C42ε22 + ... +C36γ 12
σ 31 = C51ε11 +C52ε22 + ... +C56γ 12
σ 12 = C61ε11 +C62ε22 + ... +C66γ 12
Elastic stress-strain relations

More concisely in terms of the tensor components of strain and different constants Cijkl ,
σ ij = Cijklε kll=1
3
∑k=1
3
∑
The constants C are the components of elastic stiffness and transform from one set of coordinateaxes to another according to,
Ci ' j 'k 'l ' =l '
3
∑k '
3
∑ Cijklli 'ij '=1
3
∑i '=1
3
∑ l j ' jlk 'kll 'l
It can be shown that the 36 C’s reduce to 21 independent components of stiffness.C12 = C21 or Cijkl = Cklij ,
Elastic stress-strain relations

In a similar fashion, we can write the components of strain in terms of the stress.
ε11 = S11σ 11 + S12σ 22 + S13σ 33 + S14σ 23 + S15σ 31 + S16σ 12 +α1ΔTε22 = S21σ 11 + S22σ 22 + S23σ 33 + S24σ 23 + S25σ 31 + S26σ 12 +α 2ΔTε33 = S31σ 11 + .... + S34σ 23 + .... + S36σ 12 +α3ΔTγ 23 = S41σ 11 + S42σ 22 + ... + S46σ 12 +α 4ΔTγ 31 = S51σ 11 + S52ε22 + ... + S56γ 12 +α5ΔTγ 12 = S61σ 11 + S62σ 22 + ... + S66γ 12 +α6ΔT
ε ij = Sijklσ kl +α ijΔTl=1
3
∑k=1
3
∑
Elastic stress-strain relations

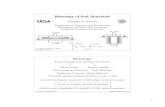
Effect of symmetry on stress – strain relations
Orthotropic materials have 3 mutually perpendicular axes such that 180o rotation about anyone of them gives an identically appearing structure. (a) rolled material, (b) wood, (c) glass-fiber cloth in an epoxy matrix, and (d) a crystal with cubic unit cell.
Elastic stress-strain relations

Effect of symmetry on stress – strain relations
When a crystal has cubic symmetry a series of 90o rotations of the coordinate axes shows that only 3 independent components of compliance, are required. Even here, a rotation of the axes away from the cubic axisintroduces all 21 components of the compliance tensor.
S11,S12 ,S44
ε11 = S11σ 11 + S12σ 22 + S12σ 33
ε22 = S12σ 11 + S11σ 22 + S12σ 33
ε33 = S12σ 11 + S12σ 22 + S11σ 11 γ 23 = S44σ 23
γ 31 = S44σ 31
γ 12 = S44σ 12
S11 S12 S12S12 S11 S12S12 S12 S11
S44S44
S44
C11 C12 C12C12 C11 C12C12 C12 C11
C44C44
C44
Elastic stress-strain relations

Effect of symmetry on stress – strain relations
It turns out that if the cubic crystal is isotropic. C11 −C12 − 2C44 = 0, Often an anisotropy ratio, A, is defined,
A =2C44
C11 −C12
For a perfectly isotropic cubic crystal A = 1. See the web site :
https://demonstrations.wolfram.com/AnisotropicElasticity/
S11 =1E
, S12 =−νE
, S44 =1G
S44 = 2(S11 − S12 )
Isotropic Elasticity
Elastic stress-strain relations

Elastic stress-strain relationsIsotropic elastic stress-strain relations
ε11 =
1E
σ 11 −υ σ 22 +σ 33( )⎡⎣ ⎤⎦
ε22 =
1E
σ 22 −υ σ 11 +σ 33( )⎡⎣ ⎤⎦
ε33 =
1E
σ 33 −υ σ 11 +σ 22( )⎡⎣ ⎤⎦
ε12 =σ 12 / 2G ε13 =σ 13 / 2G ε23 =σ 23 / 2G
E = 2G 1+υ( )

Elastic stress-strain relationsIsotropic elastic stress-strain relations:
σ ij =
E1+υ
ε ij +υE
1+υ( ) 1− 2υ( ) ε kkδ ij
There are numerous elastic constants for an isotropic solid but they are all describable in terms of any 2 elastic constants.
E = 2G 1+υ( )
λ = υE
1+υ( ) 1− 2υ( )
B = E
3 1− 2υ( )

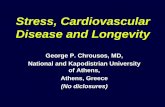
Elastic strain energyThe work done in deforming an elastic solid is reversible andIs stored in the solid as strain energy.
F
s
W =Uel =!F • d!s∫
Strain energy per unit volume
Uel = 1/ 2Fs = 1/ 2 σ xx A( ) ε xxdx( )Uel = 1/ 2 σ xxε xx( ) Adx( )
dV!
Uel
dV= uel = 1/ 2 σ xxε xx( )
Uniaxial loading

Elastic stress-strain relationsFor general loading
Uel = 1/ 2 σ xxε xx +σ yyε yy +σ zzε zz +σ xyγ xy +σ xzγ xz +σ yzγ yz( )

Principle Stresses and Principle Directions - Example
Given: σ 11 = 3,σ 12 = σ 13 = 0,σ 22 = σ 33 = −1,σ 23 = 2 MPa
σ ij =3 0 00 −1 20 2 −1
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟MPa
Since s12, s13 = 0, s11 = 3 MPa is already a principal stress. This is then really just a 2D problem involving the remainder of the non-zero stresses. But, we will work this in 3D.
3−σ( ) 0 0
0 −1−σ( ) 2
0 2 −1−σ( )= 0

Expanding the determinant
σ 3 −σ 2 − 9σ + 9 = 0
σ = 3,1,−3 MPa
By convention call sI = 3 MPasII = 1 MPasIII = -3 MPa

For: sI = 3 MPa
This together with the condition that lα 1
2 + lα 22 + lα 3
2 = 0
l1 =±100
⎛
⎝
⎜⎜
⎞
⎠
⎟⎟= ± i
For: sII = 1 MPa
lα 12 + lα 2
2 + lα 32 = 0
For: sIII = -3 MPa
lα 12 + lα 2
2 + lα 32 = 0
l3 =12
0±1∓1
⎛
⎝
⎜⎜
⎞
⎠
⎟⎟= ± 1
2j ∓ 1
2kl2 =
12
0±1∓1
⎛
⎝
⎜⎜
⎞
⎠
⎟⎟= ± 1
2j ± 1
2k

Example 2: The state of stress at a point in a body is given by:
σ xx = −10σ yy = 30
σ x = 15
⎫
⎬⎪
⎭⎪MPa
σ zz =σ xz =σ yz = 0
Determine the principal stresses and principal directions.
σ 3 − I1σ2 + I2σ − I3 = 0
I1 =σ 11 +σ 22 +σ 33
I2 =σ 22σ 33 +σ 33σ 11 +σ 11σ 22 −σ 232 −σ 12
2 −σ 132
I3 =σ 11 σ 12 σ 13
σ 12 σ 22 σ 23
σ 13 σ 23 σ 33
I1 = 20I2 = 525I3 = 0
Substitution in to Eq. 1 and solving for the rootsEq. 1
σ 1 = 35σ 2 = 0σ 3 = −15
⎫
⎬⎪
⎭⎪Mpa
To find the PDs in terms of the direction cosines we have to Substitute each of the principal stresses in to

σ xx −σ( )l1 +σ xyl2 +σ xzl3 = 0
σ xyl1 + σ yy −σ( )l2 +σ yzl3 = 0
σ xzl1 +σ yzl2 + σ zz −σ( )l3 = 0
The direction cosines must also satisfy: l12 + l2
2 + l32 = 1
σ 1 = 35σ 2 = 0σ 3 = −15
⎫
⎬⎪
⎭⎪Mpa
σ xx = −10σ yy = 30
σ x = 15
⎫
⎬⎪
⎭⎪MPa
σ zz =σ xz =σ yz = 0
For
−45l1 +15l2 = 015l1 −5l2 = 0−35l3 = 0
l1 = ±0.3162
l3 = 0Using l1
2 + l22 + l3
2 = 1
l2 = ±0.9487
For
The PD for σ 1!α1 = ±0.3162i ± 0.9487 j
σ 2 = 0σ 1 = 35
l1 = l2 = 0
l3 = ±1!α 2 = ± k
For σ 3 = −15
!α3 = ±0.9487i ∓ 0.3162 j