Cinématique des portes...
7
1 1 Cinématique des portes motorisées 1.1 Analyse du mouvement des portes motorisées (Voir document DR1) 1.2 Vérification des performances cinématiques (Réponse sur feuille copie) 1.2.1 N bm = 4,8 tr/min. 1.2.2 Nm = 3600 tr/min Le moteur convient car N m max = 4500 tr/min. 1.2.3 t 1 = 0,2s. θ 1 = 0,059 rad = 3,39°. 1.2.4 P bm = 5 W 1.2.5 P m = 14 W. Le moteur convient car à Nm = 4000 tr/min, Pm =15W. 1.2.6 θ 2 = 81°= 1,43 rad. 1.2.7 t 2 = 2,5 s. t = 2,8 s. Le cahier des charges est vérifié car il impose t =3s.
Transcript of Cinématique des portes...
1
1 Cinématique des portes motorisées
1.1 Analyse du mouvement des portes motorisées (Voir document DR1)
1.2 Vérification des performances cinématiques (Réponse sur feuille copie)
1.2.1 Nbm = 4,8 tr/min.
1.2.2 Nm = 3600 tr/min Le moteur convient car Nm max = 4500 tr/min.
1.2.3 t1 = 0,2s. θ1 = 0,059 rad = 3,39°.
1.2.4 Pbm = 5 W
1.2.5 Pm = 14 W. Le moteur convient car à Nm = 4000 tr/min, Pm =15W.
1.2.6 θ2 = 81°= 1,43 rad.
1.2.7 t2 = 2,5 s. t = 2,8 s. Le cahier des charges est vérifié car il impose t =3s.
2
2 Sécurité des passagers
2.1 Sécurité en phase de fermeture (Répondre sur feuille de copie et sur le document DR2)
2.1.1 bilan des actions mécaniques extérieures à la porte Action mécanique
(nom de la résultante)
Direction du support de l’action mécanique
Intensité de la résultante
ext IIDuuuuuuuur
® (D, xr ) 150 N
0 IICuuuuuur
® (C, yr ) ?
I IIBuuuuuur
® ? ?
2.1.2 DR2. Le galet est en contact avec le rail inférieur.
2.1.3 Bilan des actions mécaniques extérieurs qui s'exercent sur le bras moteur : { }II I Bt ® ,{ }0 I A
t ® ,{ }m I At ® .
2.1.4 { } { }II I II I B,II IB B
B
150 0B M 120 0
0 0
uuuuur uuuuuuurt ® ® ®
ì üï ïï ïï ïï ï= = í ýï ïï ïï ïï ïî þ
.
2.1.5 CmI = 25 Nm.
2.1.6 i=1,5 A. Cette intensité est un maximum.
3
2.2 Sécurité en cas de panne (Répondre sur feuille de copie, sur DR3 et DR4)
2.2.1 Liaison pivot
2.2.2 DR3
2.2.3 DR3
2.2.4 DR4
Etude de la liaison entre la roue 37 et le bras moteur 1 l'accouplement étant embrayé :
2.2.5 Les billes doivent dépasser du bras moteur 1.
2.2.6 DR3 Non frottement de 37 sur le carter 7.
Analyse de la commande de l'embrayage :
2.2.7 Ressort 14.
2.2.8 Recopier et compléter le schéma bloc de la commande de débrayage.
2.2.9 La rotation de la came 8a sur la came 8b fixe.
2.2.10 Lorsque le moteur fera tourner la roue 37, les logements seront en face des billes. Le ressort 10 poussera l’axe 35 qui fera sortir les billes 43.
Ressort 14
Ecrou 13
Rotule 12
Levier 9
Came 8 Axe 35 Billes 43
Roue 37
DR1
1.1.1 Tableau des mobilités
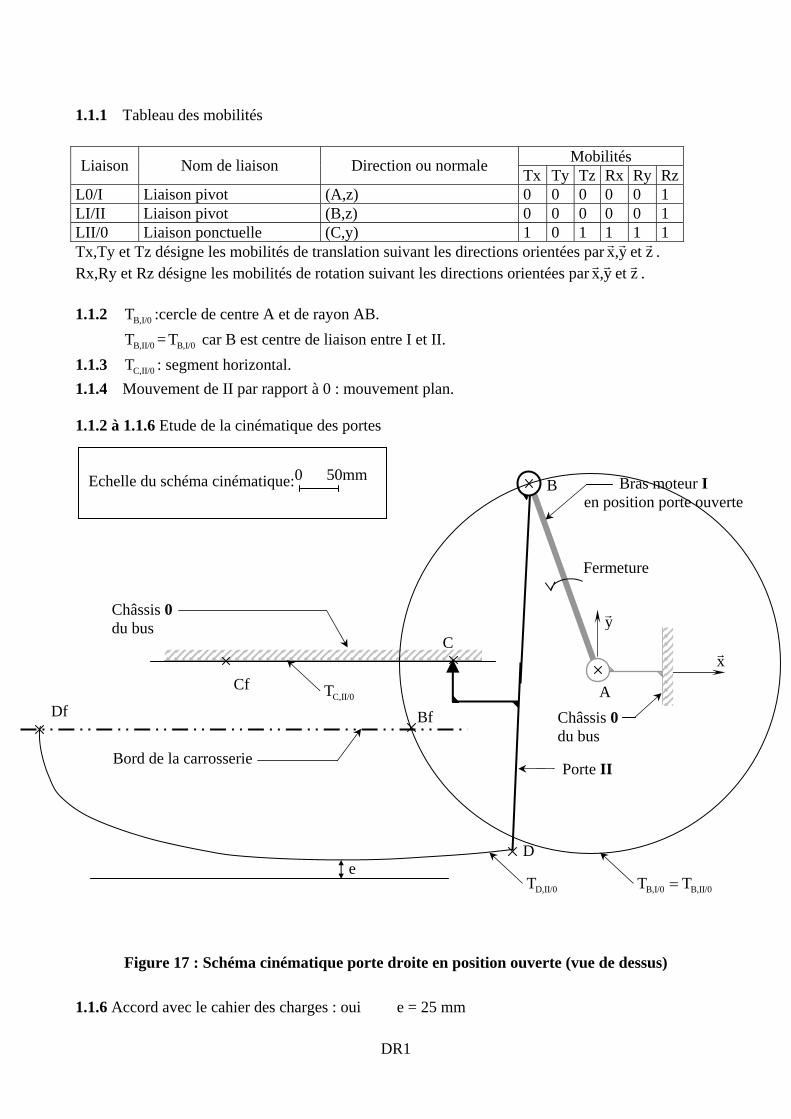
Mobilités Liaison Nom de liaison Direction ou normale Tx Ty Tz Rx Ry RzL0/I Liaison pivot (A,z) 0 0 0 0 0 1 LI/II Liaison pivot (B,z) 0 0 0 0 0 1 LII/0 Liaison ponctuelle (C,y) 1 0 1 1 1 1 Tx,Ty et Tz désigne les mobilités de translation suivant les directions orientées par x,y et zr r r . Rx,Ry et Rz désigne les mobilités de rotation suivant les directions orientées par x,y et zr r r . 1.1.2 B,I/0T :cercle de centre A et de rayon AB. B,II/0T = B,I/0T car B est centre de liaison entre I et II. 1.1.3 C,II/0T : segment horizontal. 1.1.4 Mouvement de II par rapport à 0 : mouvement plan. 1.1.2 à 1.1.6 Etude de la cinématique des portes
Figure 17 : Schéma cinématique porte droite en position ouverte (vue de dessus) 1.1.6 Accord avec le cahier des charges : oui e = 25 mm
Châssis 0 du bus
Bras moteur I en position porte ouverte
Porte II
C
B
A
xr
yrChâssis 0 du bus
Fermeture
Bord de la carrosserie
D
D,II/0T
0 50mm Echelle du schéma cinématique:
Df
Cf
BfC,II/0T
B,I/0 B,II/0T T=e
DR2
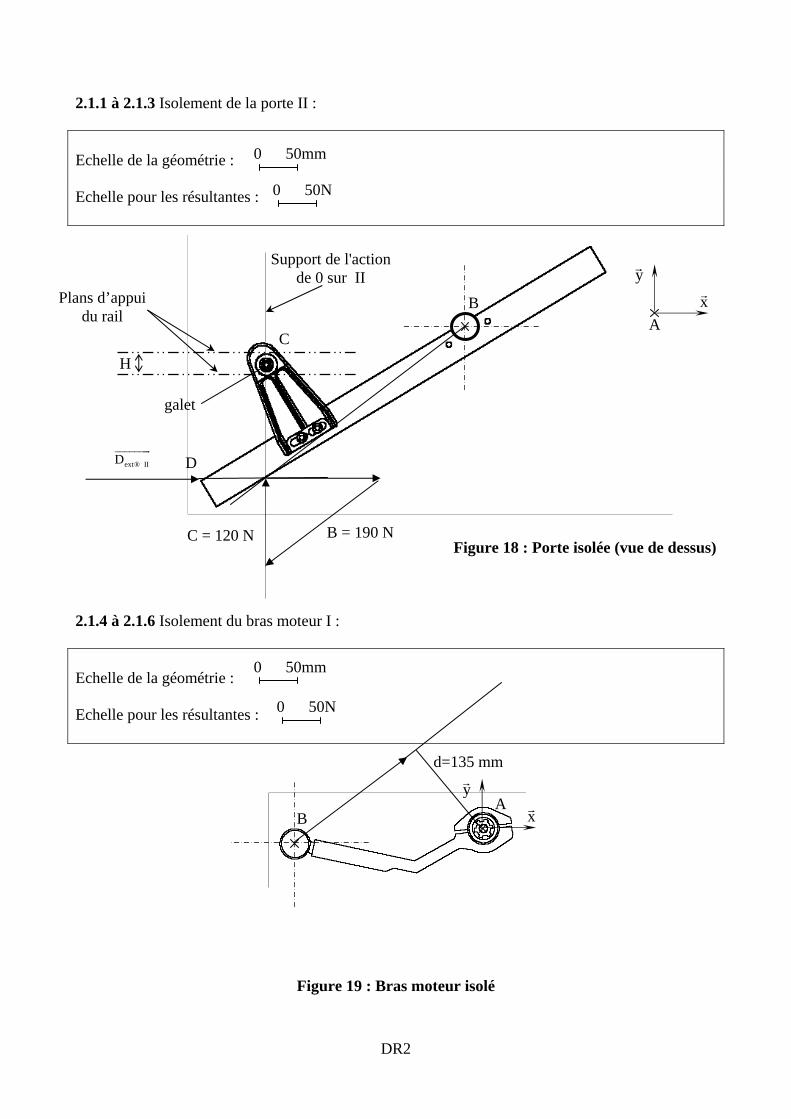
2.1.1 à 2.1.3 Isolement de la porte II : Echelle de la géométrie : Echelle pour les résultantes :
Figure 18 : Porte isolée (vue de dessus) 2.1.4 à 2.1.6 Isolement du bras moteur I : Echelle de la géométrie : Echelle pour les résultantes :
Figure 19 : Bras moteur isolé
0 50N
B A
B
D ext IIDuuuuuuur
®
A
C
xryr
xryr
Plans d’appui du rail
0 50N
H
0 50mm
0 50mm
galet
Support de l'action de 0 sur II
B = 190 NC = 120 N
d=135 mm
DR3
38a
39a
7
1
3
38b
39b
37
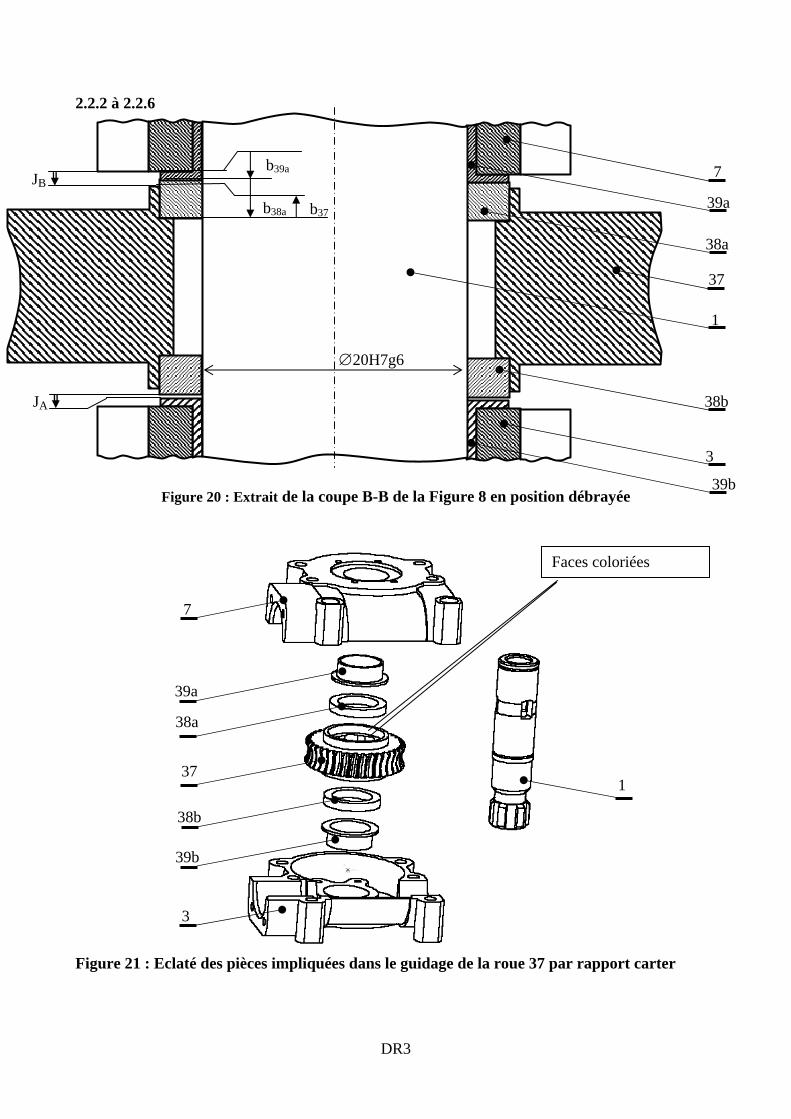
2.2.2 à 2.2.6
Figure 20 : Extrait de la coupe B-B de la Figure 8 en position débrayée Figure 21 : Eclaté des pièces impliquées dans le guidage de la roue 37 par rapport carter
JB
38a
39a
7
1
39b
38b
3
37
∅20H7g6
JA
b39a
b38a b37
Faces coloriées
DR4
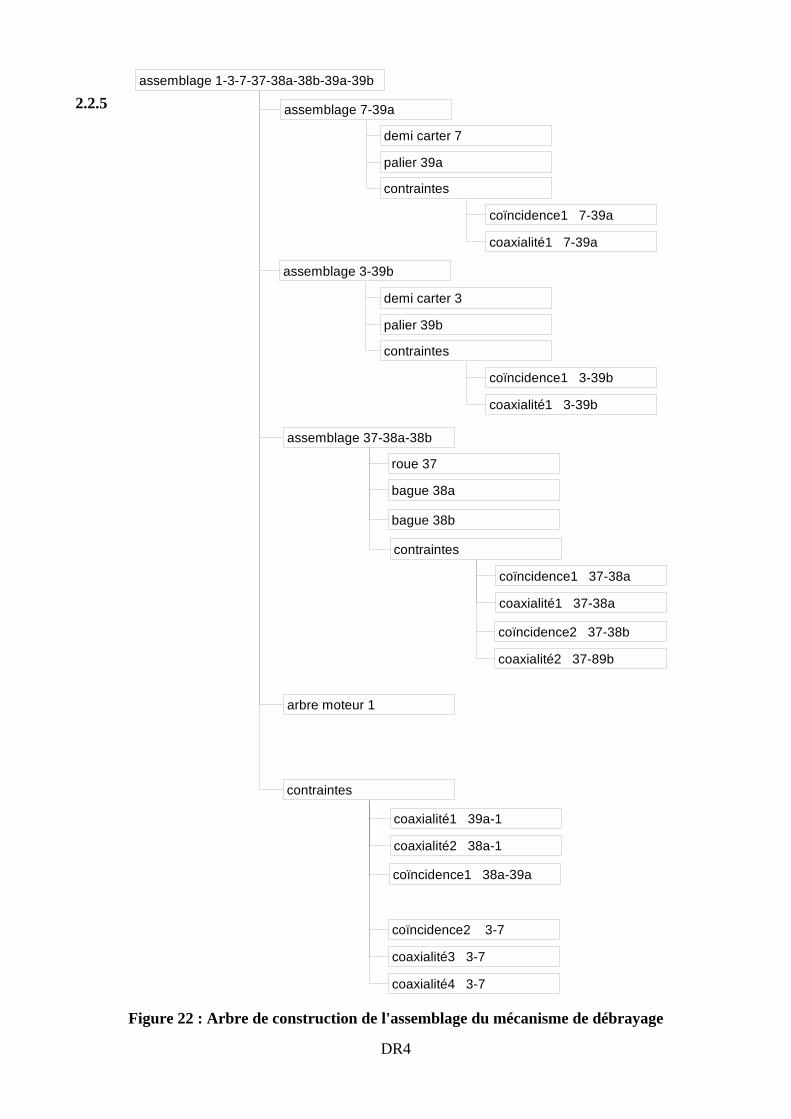
2.2.5
Figure 22 : Arbre de construction de l'assemblage du mécanisme de débrayage
assemblage 1-3-7-37-38a-38b-39a-39b
assemblage 7-39a
demi carter 7
palier 39a
coaxialité1 7-39a
coïncidence1 7-39a
contraintes
assemblage 3-39b
demi carter 3
palier 39b
coaxialité1 3-39b
coïncidence1 3-39b
contraintes
coaxialité3 3-7
coïncidence2 3-7
contraintes
coaxialité4 3-7
assemblage 37-38a-38b
roue 37
bague 38a
coaxialité1 37-38a
coïncidence1 37-38a
contraintes
bague 38b
arbre moteur 1
coaxialité2 37-89b
coïncidence2 37-38b
coaxialité2 38a-1
coaxialité1 39a-1
coïncidence1 38a-39a





![Avel bacterial β -N from˜Chitinolyticbacter meiyuanensis...reverse hydrolysis activities are mainly derived from fun-gal sources [28–34]e are few reports about the bac - terial](https://static.fdocument.org/doc/165x107/611d63b03f5386644244cefd/avel-bacterial-n-fromoechitinolyticbacter-meiyuanensis-reverse-hydrolysis.jpg)