Chapter 9 Examples of strongly stabilizable systems
24
Chapter 9 Examples of strongly stabilizable systems In this chapter, we present four examples of models of simple engineering systems. All of our examples are described by a system of partial differential equations and ordinary differential equations, and three of them have a state-space representation Σ ABB D on a Hilbert space Z, satisfying the assumptions A1-A5 in Section 2.2. These examples show that models of partial differential equations from different phys- ical domains and with different spatial dimensions can be cast into the Σ ABB framework. The fourth example is hybrid system, consisting of the parallel connection of a Σ ABB system with a finite-dimensional system. The first example, which was already introduced in Example 2.2.4, describes the transverse vibrations of a flexible beam, where control takes place through a piezoelec- tric film. The second example is a partial differential equation describing the vibrations of a 2-dimensional object; it is a model of boundary control of a vibrating rectan- gular plate. The third example describes the control of sound in a one-dimensional wave-guide, where the ends react as linear oscillators to the acoustic pressure. We have worked out the approximation procedure for solutions of the standard LQ Riccati equation described in Chapter 5 for this example. The fourth and last example is a general model for a flexible structure with rigid body dynamics. Note that even though the first three models have boundary control and boundary observation, still they are described by state-space models with a bounded control operator B and a bounded observation operator C (which will turn out to be equal to B ). 9.1 Boundary control of a flexible beam This section studies Example 2.2.4 in more detail. The model of this example describes the transverse vibrations of a beam of length L, which is clamped at one end and to which a point mass is attached at the tip. A piezoelectric film is bonded to the beam, 129
Transcript of Chapter 9 Examples of strongly stabilizable systems

Chapter 9
Examples of strongly stabilizablesystems
In this chapter, we present four examples of models of simple engineering systems.All of our examples are described by a system of partial differential equations andordinary differential equations, and three of them have a state-space representationΣ(A;B;B;D) on a Hilbert spaceZ, satisfying the assumptions A1-A5 in Section 2.2.These examples show that models of partial differential equations from different phys-ical domains and with different spatial dimensions can be cast into theΣ(A;B;B)framework. The fourth example is hybrid system, consisting of the parallel connectionof a Σ(A;B;B) system with a finite-dimensional system.
The first example, which was already introduced in Example 2.2.4, describes thetransverse vibrations of a flexible beam, where control takes place through a piezoelec-tric film. The second example is a partial differential equation describing the vibrationsof a 2-dimensional object; it is a model of boundary control of a vibrating rectan-gular plate. The third example describes the control of sound in a one-dimensionalwave-guide, where the ends react as linear oscillators to the acoustic pressure. Wehave worked out the approximation procedure for solutions of the standard LQ Riccatiequation described in Chapter 5 for this example. The fourth and last example is ageneral model for a flexible structure with rigid body dynamics.
Note that even though the first three models have boundary control and boundaryobservation, still they are described by state-space models with a bounded controloperatorB and a bounded observation operatorC (which will turn out to be equal toB).
9.1 Boundary control of a flexible beam
This section studies Example 2.2.4 in more detail. The model of this example describesthe transverse vibrations of a beam of lengthL, which is clamped at one end and towhich a point mass is attached at the tip. A piezoelectric film is bonded to the beam,
129

130 Chapter 9. Examples of strongly stabilizable systems
which applies a bending moment to the beam if a voltage is applied to it. This voltageis the control input of the system and the angular velocity at the tip is measured asoutput.
This system was described by Bailey and Hubbard as a model of one of the arms ofa satellite, consisting of a central hub with four flexible beams attached to it. In theirpaper [3], three different controllers were designed as active dampers for this systemand tested in numerical simulations and on an experimental test structure. The modelthey used is given by the partial differential equation
∂2w
∂x2 (x; t)+∂2w
∂t2 (x; t) = 0 for 0< x< L, (9.1)
with boundary conditions
w(0; t) =∂w∂x
(0; t) = 0; (9.2)
∂2w
∂x2 (L; t) = ∂3w∂t2∂x
(L; t)+u(t); (9.3)
∂3w
∂x3 (L; t) =∂2w
∂t2 (L; t); (9.4)
and measurement
y(t) =∂2w∂t∂x
(L; t): (9.5)
In Slemrod [90], a state-space representation of this model was provided and ana-lyzed. To obtain such a first-order representation, a number of spaces are needed. Theinput space and output spaceU = R. Let z= col(z1;z2;z3;z4). The state space is theHilbert space
Z = fz2 H2(0;L)L2(0;L)RR j z1 =∂z1
∂x= 0 atx= 0g
with the inner product
hz; ziZ =Z L
0
∂2z1
∂x2 (x)∂2z1
∂x2 (x)dx+Z L
0z2z2dx+z3z3+z4z4:
We define the operatorsA : D(A) Z! Z andB2 L(U;Z) by
D(A) = fz2 H4(0;L)H2(0;L)RR jz1(0) =
∂z1
∂x(0) = 0; z2(0) =
∂z2
∂x(0) = 0; z2(L) = z3;
∂z2
∂x(L) = z4g;
A =
26666664
0 I 0 0
∂4
∂x4 0 0 0
∂3
∂x3 jx=L 0 0 0
∂2
∂x2 jx=L 0 0 0
37777775; B =
2664
0001
3775 :

Section 9.2. Boundary control of a flexible plate 131
With these definitions of the Hilbert spaceZ and the operatorsA andB, the system(9.1)–(9.5) can be represented by the abstract differential equation onZ,
z(t) = Az(t)+Bu(t); z(0) = z0
y(t) = Bz(t):(9.6)
Slemrod [90] has shown thatA is a closed, densely defined, skew-adjoint operatorwith compact resolvent (In fact,A is invertible andA1 is compact). Furthermore,Agenerates aC0-semigroup of contractionsT(t) on Z. Slemrod computed the eigenval-ues ofA and showed that there exists an orthonormal basis inZ of eigenvectors ofA.The eigenvalues ofA are purely imaginary and of the formλ = jµ2, whereµ satisfiesthe equation
0 = 1+cos(µ)cosh(µ)+µ[sinh(µ)cos(µ)cosh(µ)sin(µ)]
µ3[cos(µ)sinh(µ)+sin(µ)cosh(µ)]+µ4[1cos(µ)cosh(µ)]:
Hence, it can be concluded thatA is a Riesz-spectral operator (for details on Riesz-spectral operators see Section 2.3 in Curtain and Zwart [31]). Slemrod showed thatΣ(A;;B) is approximately observable for appropriate (generic) choices ofL. Be-causeA is a Riesz-spectral operator, We can use Theorem 4.2.3 in Curtain and Zwartto show thatΣ(A;;B) is approximately observable if and only ifΣ(A;B;) is ap-proximately controllable. In our case,A = A andΣ(A;;B) is approximately ob-servable, so we have thatΣ(A;B;) is approximately controllable. It is an easy ap-plication of Theorem 4.2.3 in Curtain and Zwart, thatΣ(A;B;) is then approximatelycontrollable, for generic choices ofL, as well.
Summarizing, the model (9.1)–(9.5) can be represented byΣ(A;B;B) as in (9.6).FurthermoreΣ(A;B;B) satisfies the conditions A1–A5, and as a consequence, it sat-isfies the properties P1–P5. In particular, this means that this system is strongly sta-bilizable, while the system cannot be exponentially stabilizable, becauseB is of finiterank and bounded andA has infinitely many poles on the imaginary axis!
9.2 Boundary control of a flexible plate
In this section we look at the example of a partial differential equation on a two-dimensional spatial domain. The model is taken from You [113]. It describes thetransverse vibrations of an elastic square plate, with an edging mass along one edge.The model consists of the two-dimensional Petrovsky equation for the dynamics of theplate, coupled with the ordinary differential equations describing the dynamics at theedge where the mass is attached.
Consider a thin, homogeneous, square elastic plate with one clamped edgeΓ0 andtwo simply supported edgesΓ1 andΓ3. The last edge,Γ2, is subject to dynamical equa-tions involving the inertial force, inertial torque, external control forcef1(y; t) and ex-ternal control torquef2(y; t). The latter two constitute the inputu(t)= col( f1(t); f2(t)).

132 Chapter 9. Examples of strongly stabilizable systems
Let Ω = [0;1] [0;1] and letw(x;y; t) be the transverse displacement of the plate,for (x;y) 2 Ω. DefineΓ0 = f(x;y) 2 Ω : x = 0g, Γ1 = f(x;y) 2 Ω : y = 0g, Γ2 =f(x;y) 2 Ω : x= 1g, Γ3 = f(x;y) 2 Ω : y= 1g.
The following is a suitable model for the vibrating plate.
∂2w
∂t2 (x;y; t)+∆2w(x;y; t) = 0 for (x;y) 2 Ω (9.7)
with initial conditions
w(x;y;0) = w0;∂w∂t
(x;y;0) = w1 for (x;y) 2 Ω(9.8)
and boundary conditions
w(0;y; t) =∂w∂x
(0;y; t) = 0
w(x;0; t) =∂2w
∂y2 (x;0; t) = 0
w(x;1; t) =∂2w
∂y2 (x;1; t) = 0 (9.9)
∂2w
∂t2 (1;y; t) =∂3w
∂x3 (1;y; t)+(2σ)∂3w
∂x∂y2(1;y; t)+ f1(y; t)
∂3w∂t2∂x
(1;y; t) = ∂2w
∂x2 (1;y; t)σ∂2w
∂y2 (1;y; t)+ f2(y; t);
whereσ is the Poisson ratio. If we measure the linear and angular velocities alongΓ2,we obtain the measurement
y(t) =
24 ∂w
∂t(1;y; t)
∂2w∂t∂x(1;y; t)
35 : (9.10)
To obtain a suitable first-order formulation, we need to introduce a number of spacesand operators. The following Hilbert space will be used to construct the state space.
Z0 = L2(Ω)L2(0;1)L2(0;1);
with inner product
hz; ziZ0 =Z
Ωw(x;y)w(x;y)dxdy+
Z 1
0w1(y)w1(y)dy+
Z 1
0w2(y)w2(y)dy;

Section 9.2. Boundary control of a flexible plate 133
wherez= col(w(x;y);w1(y);w2(y)) 2 Z0. We defineA0 : D(A0)! Z0 by
D(A0) = fz= col(w(x;y);w1(y);w2(y)) 2 H4(Ω)L2(0;1)L2(0;1)jw(0;y) =
∂w∂x
(0;y) = 0; w(1;y) = w1(y);∂w∂x
(1;y) = w2(y);
w(x;0) =∂2w
∂y2 (x;0) = w(x;1) =∂2w
∂y2 (x;1) = 0g;
A0 =
26664
∆2 0 0
( ∂3
∂x3 +(2σ) ∂3
∂x∂y2)jx=1 0 0
( ∂2
∂x2 +σ ∂2
∂y2)jx=1 0 0
37775 :
Next, we introduce the Hilbert spaceZ1 with inner producth ; iZ1
Z1 = D(A120);
hz; ziZ1 = hA120z;A
120 ziZ0;
and the operatorA1 : D(A1) Z1 ! Z0
D(A1) = fz2 Z1 : 9z2 Z0 such thathz;hiZ1 = hz;hiZ08h2 Z1g;A1z = z;
Finally, the state space is the Hilbert spaceZ = Z1Z0 and the system operatorA :D(A)! Z is defined by
A =
0 I
A1 0
; (9.11)
whereD(A) = D(A1)Z1. The input space is the Hilbert space
U = L2(0;1)L2(0;1) (9.12)
with the usual inner product and the input operatorB : U ! Z is defined by
B =
0B0
; (9.13)
whereB0 : U ! Z0 is given by
B0 =
24 0 0
I 00 I
35 :

134 Chapter 9. Examples of strongly stabilizable systems
In You [113] it is shown thatA : D(A) Z! Z is a closed, densely defined skew-adjoint operator with compact resolvent (A1 2 L(Z) is compact).A generates a uni-tary C0-group of operatorsT(t) on Z. The system (9.7)-(9.10) can be reformulatedas
z(t) = Az(t)+Bu(t)
y(t) = Bz(t)
for z(t) 2 Z, with u andy2 L2(0;1)L2(0;1) andB2 L(U;Z).In the same paper it is proven thatABB generates a strongly stable contraction
semigroupTB(t). SinceAhas compact resolvent, this implies thatTB(t) is also stronglystable. He also shows thatΣ(A;B;) is approximately controllable by appealing to re-sults in Benchimol [16]. Here, we prove approximate controllability and observabilityby appealing to properties of Lyapunov equations from Hansen and Weiss [46] (Seealso our Lemma 2.1.4). It is clear that the following Lyapunov equations have thesolution1
2I
(ABB)LCz+LC(ABB)z = BBz; z2 D(A); (9.14)
(ABB)LBz+LB(ABB)z = BBz; z2 D(A): (9.15)
SinceTB (t) andTB(t) are strongly stable,LC = 12I = LB are the unique solutions of
(9.14) and (9.15), respectively. From Lemma 2.1.4, we conclude thatΣ(ABB;B;B)have identical controllability and observability gramiansLC = 1
2I = LB. As in Theo-rem 4.1.22 of Curtain and Zwart [31], this shows thatΣ(ABB;B;B) is both ap-proximately controllable and observable. Since these properties are invariant underfeedback, and output injection, respectively, this implies thatΣ(A;B;B) is both ap-proximately controllable and observable.
The above analysis shows that this state space realization satisfies the assumptionsA1-A5.
9.3 Propagation of sound in a duct
Our last example describes an acoustical system. It concerns the (one-dimensional)propagation of sound in a duct. The ends of the duct act as a linear oscillator tothe acoustic pressure inside. Actuating and sensing takes place through these linearoscillators. A system of this kind can be used to model frequency dependent reflectionof a acoustic plane wave at a so-called locally reacting surface (see page 263 of Morseand Ingard [73]).
We assume that the flow is uniform in a cross section of the duct. Hence, thesound only propagates in the longitudinal direction and the quantities only dependon the longitudinal spatial variable,x. Ψ(x; t) denotes the velocity potential, so that∂Ψ=∂x(x; t) is the particle velocity in the fluid and∂Ψ=∂t(x; t) is the acoustic pressure.

Section 9.3. Propagation of sound in a duct 135
Now, Ψ satisfies the wave equation
∂2Ψ∂t2 (x; t) =
∂2Ψ∂x2 (x; t); x2 (0;1).
The displacements of the two endsη0(t) at x= 0 andη1(t) at x= 1 satisfy
d2η0
dt2(t)+d0
dη0
dt(t)+k0η0(t) = ρ0
∂Ψ∂t
(0; t)+ f1(t)
d2η1
dt2(t)+d1
dη1
dt(t)+k1η1(t) = ρ1
∂Ψ∂t
(1; t)+ f2(t);
where f1 and f2 are external forces at the ends. From continuity of velocity at theboundary, we obtain
dη0
dt(t) = ∂Ψ
∂x(0; t)
dη1
dt(t) =
∂Ψ∂x
(1; t):
The measurements are taken to be proportional to the velocities at the endpoints
y1(t) =1
2ρ0
dη0
dt(t)
y2(t) =1
2ρ1
dη1
dt(t):
The model could be brought into first-order form straightforwardly, by introducingz= col(z1;z2;z3;z4) as state vector, wherez1 = Ψ, z2 = ∂Ψ=∂t, z3 = col(η0;η1) andz4 = col(η0; η1). The state space is then endowed with the norm corresponding tothe energy of the system (see Beale [14]). For the approximation that we want toperform, a different state-space realization, introduced by Ito and Propst [49] is moreconvenient. An important difference between the approach of Ito and Propst and theone of Beale is that the former obtain anA-operator that does have compact resolvent,but Beale does not. The approach of Ito and Propst is to decomposeΨ into a partw+ propagating in the positive direction and a partw propagating in the negativedirection:
w+(x; t) =12(∂Ψ∂t
(x; t) ∂Ψ∂x
(x; t));
w(x; t) =12(∂Ψ∂t
(x; t)+∂Ψ∂x
(x; t)):
Definingφ0 = η0, φ1 = η1, ψ0 = η0, ψ1 = η1, we obtain
ddt
26666664
w(x; t)w+(x; t)
φ0(t)φ1(t)ψ0(t)ψ1(t)
37777775
=
2666666664
∂w∂x
(x; t)
∂w+
∂x(x; t)
ψ0(t)ψ1(t)
ρ0w(0; t)ρ0w+(0; t)k0φ0(t)d0ψ0(t)ρ1w(1; t)ρ1w+(1; t)k1φ1(t)d1ψ1(t)
3777777775;

136 Chapter 9. Examples of strongly stabilizable systems
with boundary conditions
ψ0(t) = w(0; t)+w+(0; t)
ψ1(t) = w(1; t)w+(1; t):
The state-space is taken to beZ0 = L2(0;1)L2(0;1)R4 with inner product (writing
z= col(w(x);w+(x);φ0;φ1;ψ0;ψ1))
hz; zi = hw; wiL2 + hw+; w+iL2 +k0
2ρ0φ0φ0+
k1
2ρ1φ1φ1 (9.16)
+1
2ρ0ψ0ψ0+
12ρ1
ψ1ψ1:
The input and output spaces areU = Y = R2. Let us define the operatorsA0, B0 andC0 as
D(A0) = fz2 Z0 j w 2 H1(0;1); w+ 2 H1(0;1); (9.17)
ψ0 =w(0)+w+(0); ψ1 = w(1)w+(1)g;
A0z =
2666666664
∂w∂x (x; t)
∂w+
∂x (x; t)
ψ0(t)ψ1(t)
ρ0w(0; t)ρ0w+(0; t)k0φ0(t)d0ψ0(t)ρ1w(1; t)ρ1w+(1; t)k1φ1(t)d1ψ1(t)
3777777775; (9.18)
B0 =
26666664
0 00 00 00 01 00 1
37777775; C0 =
"0 0 0 0 1
2ρ00
0 0 0 0 0 12ρ1
#: (9.19)
With these definitions, the system can be written as
z = A0z+B0u
y = C0z:
It is an easy computation to see thatC0 = B0.In Ito and Propst [49], it was shown thatA0 generates aC0-semigroup of contrac-
tionsT0(t) onZ0 andA0 has compact resolvent. BecauseA0 has compact resolvent,A0only has point spectrum and it can be computed thatλ2 σ(A0) if and only if λ satisfies
0 = (λ2+(d0+ρ0)λ+k0)(λ2+(d1+ρ1)λ+k1)eλ
(λ2+(d0ρ0)λ+k0)(λ2+(d1ρ1)λ+k1)eλ:(9.20)

Section 9.3. Propagation of sound in a duct 137
The eigenvalues all have negative real part and occur in complex conjugate pairs. Theassociated eigenvectors are given by
zλ =
26666664
(λ2+(d0+ρ0)λ+k0)(λ2+(d1ρ1)λ+k1)eλx
(λ2+(d0ρ0)λ+k0)(λ2+(d1ρ1)λ+k1)eλx
2ρ0(λ2+(d1ρ1)λ+k1)
2ρ1(λ2+(d0+ρ0)λ+k0)eλ
2ρ0(λ2+(d1ρ1)λ+k1)λ2ρ1(λ2+(d0+ρ0)λ+k0)λeλ
37777775:
The vectorsfzλj λ 2 σ(A0)g form a complete orthogonal set inZ0, and all eigenvaluesare simple.
Because in acoustics, one is only interested in variations of the pressure, we have toadd an extra condition to “filter out” states that correspond to the hydrostatic pressure,i.e., the part of pressure that is constant in the spatial variablex. It can be checkedthat this corresponds to states that are in the subspace spanned by the eigenvectorcorresponding toΛ = 0, i.e., multiples ofz0 = col(k0k1;k0k1;2ρ0k1;2ρ1k0;0;0).This leads to the extra condition
Z 1
0w(x)dx+
Z 1
0w+(x)dxφ0φ1 = 0:
Therefore, we do not useZ0 as our state-space, but the quotient space
Z = fz2 Z0jZ 1
0w(x)dx+
Z 1
0w+(x)dxφ0φ1 = 0g:
Z is a closed linear subspace ofZ0 and thus a Hilbert space with the same inner prod-uct. DefineA= A0jZ. A is the generator of aC0-semigroup of contractionsT(t) in ZbecauseT0(t) mapsZ into Z (this follows from the fact thatz0 is an eigenvector ofAandZ is the orthogonal complement ofz0 in Z0).
A also inherits the properties that it is a Riesz-spectral operator and that it hascompact resolvent fromA0. SoA has only point-spectrum and furthermore,λ2 σ(A) ifand only ifλ 6= 0 andλ satisfies (9.20). We defineB andC as the restrictions ofB0 andC0 to Z. Using the controllability and observability test in Theorem 4.2.3 of Curtainand Zwart [31], it can be computed thatΣ(A;B;C) is approximately controllable andapproximately observable.
We can summarize the previous results by saying thatC = B and the systemΣ(A;B;B) satisfies the assumptions A1-A5 as in Section 2.2.
For this example we perform a numerical approximation of the strongly stabilizingsolution of the standard LQ algebraic Riccati equation
AXz+XAzXBBXz+BBz = 0; z2 D(A) (9.21)
as was described in Chapter 5. To do so, we construct a sequence of approximat-ing finite-dimensional systems, and we will show that it satisfies the conditions that

138 Chapter 9. Examples of strongly stabilizable systems
guarantee convergence of the approximating solutions of the finite-dimensional LQRiccati equations to the solution of the infinite-dimensional LQ Riccati equation. Itoand Propst [49] proposed an approximation scheme forΣ(A0;B0;C0). We explainthis scheme and then make an obvious modification of it, to obtain an approximationscheme forΣ(A;B;C).
Let z= col(w(x);w+(x);φ0;φ1;ψ0;ψ1) 2 Z0. We definezN0 by
zN0 = πN
0 z= (w0 ; ;wN ;w+0 ; ;w+
N1;φN0 ;φ
N1 ;ψ
N0 ;ψ
N1 )
T 2 R2N+5;
whereφN0 = φ0, φN
1 = φ1, ψN0 = ψ0, ψN
1 = ψ1 andwk , w+m, k= 0; : : : ;N; m= 0; : : : ;N
1 are defined as follows. LetPk(x) be the Legendre polynomial of degreek. The setfPk(x); k 2 Ng forms an orthogonal basis ofL2(1;1) andkPkk2
L2(1;1) = 2=(2k+
1). Hence the polynomialspk(x) =p
2k+1Pk(2x1) form an orthonormal basis forL2(0;1). We expandw(x) andw+(x) with respect to the basisfpk(x); k 2 Ng andtruncate these expressions.
wN(x) =N
∑k=0
wk pk(x)
w+N1(x) =
N1
∑k=0
w+k pk(x):
Note the difference in notation between the approximating functionwN(x) and thecoefficientwN. Let iN0 denote the corresponding embedding which associates with avectorv in R2N+5 an element inZ0, defined by
iN0 v = col(N
∑k=0
vk+1pk(x);N1
∑k=0
vN+2+kpk(x);v2N+2;v2N+3;v2N+4;v2N+5):
Next, we introduce
wN(x) =N
∑k=0
wk pk(x)+apN+1(x)
w+N1(x) =
N1
∑k=0
w+k pk(x)+bpN(x);
wherea andb are chosen such that ˜wN(x) andw+N1(x) satisfy the boundary conditions
ψ0 = wN(0)+ w+N1(0)
ψ0 = wN(1) w+N1(1):

Section 9.3. Propagation of sound in a duct 139
We will now usewN(x) andw+N1(x) to define the approximationAN
0 of A0.
AN0
26666666666666664
w0...
wNw+
0...
w+N1φ0φ1ψ0ψ1
37777777777777775
=
266666666666666664
a0...
aNa+0...
a+N1ψ0ψ1
k0φ0d0ψ0ρ0wN(0)ρ0w+N1(0)
k1φ1d1ψ1ρ1wN(1)ρ1w+N1(1)
377777777777777775
;
anda0 ; ;aN;a+0 ; ;a+N1 are defined via
dwNdx
(x) =N
∑k=0
ak pk(x); dw+N1
dx(x) =
N1
∑k=0
a+k pk(x):
The approximationsBN0 andCN
0 of B0 andC0 are given by
BN0 =
0(2N+3)2
I2
; CN
0 = (BN):
The approximating statezN is now obtained by orthogonal projection ofzN0 on the
2N+4-dimensional linear subspace ofR2N+5 of vectors satisfyingZ 1
0
N
∑k=0
wk pk(x)dx+Z 1
0
N1
∑k=0
w+k pk(x)dxφ0φ1 = 0;
Let this orthogonal projection be denoted byχN and the associated embedding fromR2N+4 into R2N+5 by hN. The approximating systemΣ(AN;BN;CN) is obtained byrestrictingAN
0 , BN0 andCN
0 to this 2N+4-dimensional space, i.e.AN = χNAN0 hN, BN =
χNBN0 , CN = CN
0 hN. The projectionπN and embeddingiN for the total approximationare now given as
iN : R2N+4 ! Z; iN = hNiN0πN : Z! R
2N+4; πN = πN0 χN:
Now πNiN is an orthogonal projection inZ andiNπN = I2N+4.Note that the approximationAN does not satisfyAN = πNAiN, as in the scheme of
Section 5. However, we do haveAN +(AN) 0 andCN = (BN). So the result ofLemma 5.4.1 is still valid.
In Ito and Propst [49] it was shown that for everyz2D(A0) there exists a sequencezN 2 R2N+5 such that
kiNzNzk ! 0

140 Chapter 9. Examples of strongly stabilizable systems
and
kiNANzNAzk ! 0;
asN!∞. This is easily adapted to the existence of a sequencezN 2 R2N+4 convergingto z2 D(A). Similarly, we can prove that for allz2 D(A) there exists a sequencezN 2 R2N+4 such that
kiNzNzk ! 0
and
kiN(AN)zNAzk ! 0:
It is easily shown thatCN andBN converge strongly toC andB respectively. As inLemma 5.4.2, these results imply that the finite-dimensional systemsΣ(AN;BN;CN)converges strongly to the infinite-dimensional systemΣ(A;B;B). Hence, we canconclude that ifΣ(AN;BN;CN) is observable for allN, then the solutionX of theinfinite-dimensional LQ Riccati equation associated withΣ(A;B;B) can be approx-imated by the sequence of solutionsXN of the matrix LQ Riccati equations associatedwith Σ(AN;BN;CN).
We implemented the approximation scheme in Matlab. The values for the parame-ters we used are:
ρ0 = ρ1 = 1
d0 = d1 = 0:01
k0 = k1 = 1
We computed the approximating systems forN = 2;4;8;16;32;64. Then we com-puted the solutions to the Riccati equations corresponding to these approximations.To illustrate the convergence of the solutions, we compare the solutions in a numberof characteristics. First of all, we compute the matrix norms of the approximatingsolutions. Secondly, we restrictX64 to the spaces on which the lower order approxi-mations are defined and compute the norm of the difference:kXNπNi64X64π64iNk,for N = 2;4;8;16;32. This norm measures to what extent the lower order approxima-tions matches the behaviour of the higher-order one on the lower-dimensional space.These values are listed in Table 9.1, below.
N kXNk kXNπNiMXMπMiNk2 0.9802 6.31e-114 0.9802 1.81e-108 0.9802 6.25e-1016 0.9802 2.32e-932 0.9802 1.57e-864 0.9802 0
Table 9.1: Comparison of norms of the different approximations

Section 9.3. Propagation of sound in a duct 141
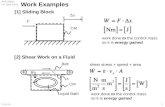
Finally, we have investigated the closed-loop systems corresponding to the dif-ferent approximative Riccati feedbacksFXN. We have given plots of the closed-looppoles, and we have computed the open-loop and closed-loop step responses. Becausethe step responses for the different values ofN were indistinguishable, we only givethe plots forN = 16.
From these results, we observe the following. The norms of the approximationsare very close to each other, and far larger than the norm of the difference between thelow-order approximations and the restriction ofX64 to the lower-order spaces. This in-dicates that the low-order approximations succeed very well in capturing the behaviourof the infinite-dimensional solution on the finite-dimensional spaces on which they aredefined. The plots of the closed-loop poles in Figure 9.1 and Figure 9.2 indicate thatthe closed-loop system matrices converge asN tends to infinity. As expected, sincethe original system is not exponentially stabilizable, the poles are converging to theimaginary axis. The plots of the step responses for the different values ofN are indis-tinguishable. We plotted step responses forN = 16 in Figure 9.3 and Figure 9.4. InFigure 9.5 and Figure 9.6 we plotted the response of the velocity potentialΨ(x; t) to astep input atx= 0, both for the open-loop and the closed-loop system.
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05−500
0
500closed−loop poles, N=64
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05−500
0
500closed−loop poles, N=32
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05−500
0
500closed−loop poles, N=16
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05−500
0
500closed−loop poles, N=8
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05−500
0
500closed−loop poles, N=4
−0.25 −0.2 −0.15 −0.1 −0.05 0 0.05−500
0
500closed−loop poles, N=2
Figure 9.1: Closed-loop poles,N = 2;4;8;16;32;64

142 Chapter 9. Examples of strongly stabilizable systems
−10 −9 −8 −7 −6 −5 −4 −3 −2 −1 0 1
x 10−3
−500
0
500closed−loop poles, N=64
−10 −9 −8 −7 −6 −5 −4 −3 −2 −1 0 1
x 10−3
−500
0
500closed−loop poles, N=32
−10 −9 −8 −7 −6 −5 −4 −3 −2 −1 0 1
x 10−3
−500
0
500closed−loop poles, N=16
Figure 9.2: Close-up plot of closed-loop poles,N = 16;32;64
Time (sec.)
Am
plitu
de
Step Response
open−loop system
−0.4
−0.2
0
0.2
0.4From: U1
To:
Y1
From: U2
0 20 40 60 80 100−0.4
−0.2
0
0.2
0.4
To:
Y2
0 20 40 60 80 100
Figure 9.3: Open-loop step response,N = 16

Section 9.3. Propagation of sound in a duct 143
Time (sec.)
Am
plitu
deStep Response
closed−loop system
−0.2
−0.1
0
0.1
0.2
0.3From: U1
To: Y
1From: U2
0 20 40 60 80 100−0.2
−0.1
0
0.1
0.2
0.3
To: Y
2
0 20 40 60 80 100
Figure 9.4: Closed-loop step response,N = 16
00.2
0.40.6
0.81
0
5
10
15
20
−0.2
0
0.2
0.4
0.6
0.8
xt
Figure 9.5: Open-loop step response,N = 16

144 Chapter 9. Examples of strongly stabilizable systems
00.2
0.40.6
0.81
0
5
10
15
20
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Figure 9.6: Closed-loop step response,N = 16
9.4 A flexible structure with rigid body dynamics
This example gives a general model describing vibrations in a flexible structure, com-bined with the rigid body dynamics of the structure (i.e., the translation of its centre ofmass and its rigid body rotation). The model we give is an infinite-dimensional versionof the one in Sections 2.1 and 2.2 in Joshi [50].
This model is an example of a statically stabilizable system which is not in theΣ(A;B;B) class. Firstly, becauseA does not generate a contraction semigroup andsecondly becauseC 6= B. It is therefore a motivating example for those results inthis thesis that deal with strong stability for systemsΣ(A;B;C) outside theΣ(A;B;B)class.
The structure is equipped with a number (mf ) of force actuators and a number (mT)of torque actuators. Letξ 2 R3 denote the position of the centre of mass and let theforce exerted by thei-th actuator befi 2 R3. The translation of the centre of mass isgiven by
mξ =mf
∑i=1
fi: (9.22)
The attitude of the structure is given by the vectorα 2 R3 describing the rigid bodyEuler angle with respect to thex-, y- andz-axes. It satisfies
Jα =mf
∑i=1
ri fi +mT
∑j=1
Tj ; (9.23)

Section 9.4. A flexible structure with rigid body dynamics 145
whereTj denotes the torque exerted by thej-th torque actuator andri 2 R3 describes
the location where the forcefi is applied. The elastic motion is described by
q+Dq+Λq =mf
∑i=1
ΨTi fi +
mT
∑j=1
ΦTj Tj (9.24)
= ΨTF +ΦTT:
Here, q is the infinite sequence of modal amplitudes, which is assumed to be anelement of a Hilbert spaceQ (for instance,Q = l2(N)). F = col( f1; : : : ; fmf ) andT = col(T1; : : : ;TmT ). The infinite matricesΨi 2 L(Q;R3) and Φ j 2 L(Q;R3) arecalled themode shape matricesandmode slope matrices, respectively.Λ is thestiff-ness operatorand it is assumed thatΛ = Λ > 0. Thedamping operator DsatisfiesD = D 0. Both D and Λ are closed and densely defined. In general, both areunbounded operators.
We call this a hybrid system, because it consist of a finite-dimensional part (thedynamics ofξ andα) coupled with a distributed part (the elastic motion). The couplingconsists of the fact that both parts are effected by the same control inputsfi andTj . Theaim of this section is to show that under certain conditions this system has a staticallystabilizable state space realization.
We definep= col(mξ;Jα;q)2R3R3Q=: Z1. Then the dynamics is describedas
p+ Dp+ Λp = ΓTu; (9.25)
where
D =
24 0 0 0
0 0 00 0 D
35 ; Λ =
24 0 0 0
0 0 00 0 Λ
35 ; (9.26)
ΓT =
24 I3 I3 03 03
R1 Rmf I3 I3ΨT
1 ΨTmf
ΦT1 ΦT
mT
35 ;
u= col( f1; : : : ; fmf ;T1; : : : ;TmT)2 R3mf +3mT =: U and the matricesRi , i = 1: : : ;mf are
given by
Ri =
24 0 r i
z r ix
r iz 0 r i
yr i
x r iy 0
35 ; whereri =
0@ r i
xr iy
r iz
1A :
If we have position sensors at the same locations as the force actuators and attitudesensors at the same locations as the torque actuators, then the observation is given by
yp = Γp: (9.27)

146 Chapter 9. Examples of strongly stabilizable systems
On the other hand, the use of rate sensors, measuring translational and rotational ve-locities at those locations leads to the observation
yr = Γp: (9.28)
Following Joshi [50], let us suppose that both types of measurements are available andthe observation isy = col(yp;yr). To construct a first order representation, we takeas the statez= col(z; z) on the state spaceZ = fz= col(z1;z2) 2 Z1Z1g with innerproduct
hz;wiZ = h(Λ+ΓTΓ)z1;w1iZ1 + hz2;w2iZ1: (9.29)
This leads to the following representation of the system (9.22), (9.23), (9.24), (9.27),(9.28),
z(t) = Az(t)+Bu(t); z(0) = z0;
y(t) = Cz(t);(9.30)
where
A =
0 IΛ D
; B =
0
ΓT
; C =
Cp
Cr
=
Γ 00 Γ
:
To show that the above equations represents a bounded linear system, there is somework to be done: We need to show that
1. C2 L(Z;U U);
2. (9.29) defines an inner product onZ. this is true only ifΛ+ΓTΓ > 0;
3. A is the generator of aC0-semigroup onZ.
1. The operatorΓ is a bounded operator fromZ1 toU , because the operatorsΦi , Ψ j
andRi are bounded. Therefore, it is obvious thatCr = [ 0 Γ ] is bounded. To establishthe boundedness ofC, we therefore only need to check thatCp = [ Γ 0 ] 2 L(Z;U).We have
kzk2Z = h(Λ+ΓTΓ)z1;z1iZ1 +kz2k2
Z1
h(Λ+ΓTΓ)z1;z1iZ1
kΓz1k2U
= kCpzk2U :
So, indeedC is a bounded output operator.2. Next, we prove thatΛ+ΓTΓ > 0. From the relation betweenΛ andΛ in (9.26)
and the fact thatΛ is assumed to be a positive definite, self-adjoint operator, it followsthatΛ+ΓTΓ > 0 if and only if
I6 0
ΓTΓ
I60
> 0:

Section 9.4. A flexible structure with rigid body dynamics 147
So, definingΓ = Γ
I60
, we require that ker(Γ) = f0g, where
Γ =
266666664
I3 R1...
...I3 Rmf
0 I3...
...0 I3
377777775:
Suppose that there exists anx2 R6 such thatΓx= 0. Then0@ x1
x2x3
1A+Ri
0@ x4
x5x6
1A = 0
and 0@ x4
x5x6
1A = 0
for i = 1; : : : ;mf . Consequently,x= 0 and, indeed,Λ+ΓTΓ > 0.3. Next we show thatAgenerates aC0-semigroup onZ via a perturbation technique.
More precisely, we show thatA2 := A [ ΓT 0 ][ 0 ΓT ]T generates aC0-semigroupZ. As A is a bounded perturbation ofA2, this implies thatA generates a semigroup onZ, as well. We need the following assumptions:
(a) Λ+ΓTΓ is boundedly invertible;
(b) D(Λ) D(D) (or equivalentlyD(Λ) D(D)).
The domain of definition ofA2 is D(A2) = D(A) = D(Λ)D(Λ12). Clearly,A2 is
densely defined, becauseΛ is. First we show thatA2 is closed. It is easy to see thatunder the assumptions (a) and (b), the operatorV given by
V =
(Λ+ΓTΓ)1D (Λ+ΓTΓ)1
I 0
satisfies
V 2 L(Z),
A2V = VA2 = I ,
Im(V) = D(A2).

148 Chapter 9. Examples of strongly stabilizable systems
From Theorem A.3.46 in Curtain and Zwart [31], we can now conclude thatA2 is aclosed operator. Next we show that bothA2 and its adjoint are dissipative operators.For anyz2 D(A2),
hA2z;ziZ = h(Λ+ΓTΓ)z2;z1iZ1 + h(Λ+ΓTΓ)z1 Dz2;z2iZ1
= hDz2;z2iZ1
0:
Hence,A2 is a dissipative operator. In exactly the same way, it can be shown thatA2,which is given by
A2 =
0 I
Λ+ΓTΓ D
;
is dissipative, as well. We can now apply the Lumer-Phillips Theorem (see Section 1.4in Pazy [81]) to show thatA2 generates aC0-semigroup of contractions. As a conse-quence
A = A2+
0 0
ΓTΓ 0
generates aC0-semigroup, as well (see Theorem 3.2.1 in Curtain and Zwart [31] fora proof of the fact thatA+ D generates aC0-semigroup onZ if A generates aC0-semigroup onZ andD is a bounded operator onZ).
We now state our main result concerning this example.
Lemma 9.4.1 Let the systemΣ(A;B;C) be defined as in (9.30) on the state space Zand assume that the following conditions are satisfied:
(i) Λ = Λ > 0, D = D 0 are closed, densely defined operators withD(D) D(Λ);
(ii) A has compact resolvent;
(iii) Σ(A;B;C) is approximately controllable;
(iv) Σ(A2;B;Cr) is approximately observable, where A2 = A ΓT 0 0
Γ
.
(v) Λ+ΓTΓ is boundedly invertible and(Λ+ΓTΓ)1D is bounded;
Then the systemΣ(A;B;C) is statically stabilizable. In particular, the static outputfeedback law u= GpypGryr renders the closed-loop system strongly stable, forany positive-definite matrices Gp and Gr.
Proof The conditions(i) and(v) assure thatΣ(A;B;C) is a well-defined bounded linearsystem. The proof consists of the following steps:

Section 9.4. A flexible structure with rigid body dynamics 149
1. We first restrict to the case thatGp = I and show that the preliminary feedbacku=yp+v leads to the systemΣ(A2;B;C). This system has almost all featuresof systems in theΣ(A;B;B)-class. The only difference is that there are moreoutputs, namelyyp.
2. Then we show, using theΣ(A;B;B)-structure and additional information of thesystem that the feedbackv=Gryr leads to a strongly stable closed-loop systemΣ(Acl;B;C), whereAcl = ABCpBGrCr .
3. Finally, we show how to include the case of general positive definite matricesGp.
For ease of reference, we write
Σ1 = Σ(A;B;C); Σ2 = Σ(A2;B;Cr) = Σ(A2;B;B):
1. Application of the static output feedback lawu = yp+ v to the systemΣ1 leadsto Σ(A2;B;C), i.e., the systemΣ2 with the additional outputyp = Cpz. We show thatΣ2 is in theΣ(A;B;B) class. Earlier in this section, we have already shown thatA2generates a contraction semigroup. As approximate controllability is invariant underfeedback,Σ2 is approximately controllable by assumption(iii) . Assumption(iv) statesthatΣ2 is approximately observable. ThatA2 has compact resolvent follows from thefact thatA has compact resolvent, as follows. We have
(sIA2)1 = (sIA)1+(sIA)1
0 0
ΓTΓ 0
(sIA2)
1:
The first term in the right-hand side is compact for alls2 ρ(A). Fors2 ρ(A)\ρ(A2),the second term is the product of a compact operator with a bounded operator, henceit is compact. As bothA andA2 are dissipative, the open right half-plane is containedin ρ(A)\ρ(A2), so this intersection is not empty. Consequently, the right-hand side iscompact and soA2 has compact resolvent. Thus,Σ2 satisfies A1-A5 (see page 20), andso it is in theΣ(A;B;B)-class.
2. As Σ2 = Σ(A2;B;B) belongs to our standard class, it is strongly stabilized by thefeedbackv = yr . That this also happens forv = Gryr can be seen by rewritingthis case as the feedbackv = y for the systemΣ(A;BS;SB), whereS is the squareroot of Gr . This system is also in theΣ(A;B;B)-class. Thus, we have thatΣ3 =Σ(A2BGrCr ;B;Cr) = Σ(Acl;B;Cr) is strongly stable. That is, we have
Acl := A2BGrCr = ABGrCr BCp generates a strongly stable semigroup;
input stability:B(sIAcl)1z2 H2(U) for all z2 Z
output stability:Cr(sIAcl)1z2 H2(U) for all z2 Z
input-output stability:Cr(sIAcl)1B2 H∞(L(U)).

150 Chapter 9. Examples of strongly stabilizable systems
However, we are interested in the strong stability of the overall closed loop systemΣcl = Σ(Acl;B;C). Hence, it remains to show that, in addition to the above, outputstability and input-output stability hold for the outputyp, as well. The remaininganalysis of part 2 of this proof is therefore dedicated to proving
output stability with respect toyp: Cp(sIAcl)1z2 H2(U) for all z2 Z
input-output stability with respect toyp: Cp(sIAcl)1B2 H∞(L(U)).
To do so, we take a closer look at(sIAcl)1. For convenience of notation, let us
write Λcl = Λ+ΓTΓ andDcl = D+ΓTGrΓ. Then,
(sIAcl)1 =
sI I
Λcl sI+Dcl
1
=
(s2I +sDcl +Λcl)
1(sI+Dcl) (s2I +sDcl +Λcl)1
(s2I +sDcl +Λcl)1Λcl s(s2I +sDcl +Λcl)
1
:(9.31)
If Acl is not exponentially stable, then(sIAcl)1 62H∞. But, from the output stability
of Σ3, we can conclude that
Γ(s2I +sDcl +Λcl)1Λclz1 2 H2(U) 8z1 2 Z1; (9.32)
sΓ(s2I +sDcl +Λcl)1z1 2 H2(U) 8z1 2 Z1; (9.33)
and from the input-output stability
sΓ(s2I +sDcl +Λcl)1ΓT 2 H∞(L(U)): (9.34)
We now first prove output stability ofΣcl, i.e., we show thatCp(sIAcl)1z2
H2(U) for all z2 Z. From (9.31) it follows that
Cp(sIAcl)1z = sΓ(s2I +sDcl +Λcl)
1z1
+Γ(s2I +sDcl +Λcl)1Dclz1+Γ(s2I +sDcl +Λcl)
1z2:
The first term on the right-hand side is inH2 for all z1, by (9.33). For the second term,we obtain from the assumption thatΛ1
cl andΛ1cl Dcl are bounded and using (9.32),
that for allz1 2 Z1
Γ(s2I +sDcl +Λcl)1Dclz1 = Γ(s2I +sDcl +Λcl)
1Λcl Λ1cl Dclz1 2 H2(U):
In a similar way, it can be proven that the last term on the right-hand side is inH2(U)for all z2 2 Z1, using (9.32) and the boundedness ofΛ1
cl .Next we prove the input-output stability ofΣcl, i.e., we show that the closed loop
transfer function fromu to yp, Cp(sIAcl)1B, is in H∞(L(U)). We have,
Cp(sIAcl)1B = Γ(s2I +sDcl +Λcl)
1ΓT

Section 9.4. A flexible structure with rigid body dynamics 151
and we denote the above transfer function byG(s). If we write
F(s) = sΓ(s2I +sDcl +Λcl)1ΓT ;
then G(s) = F(s)=s. By equation (9.34),F(s) 2 H∞(L(U)). The function 1=s isalso holomorphic inC +0 and it is boundedC +0 nBε(0) for anyε > 0, where we defineBε(0) = fs2 C
+0 j jsj < εg. Combining these observations, it follows thatG(s) is
holomorphic inC +0 and bounded inC +0 nBε(0). Furthermore,G(0) = ΓΛ1cl ΓT , which
is bounded by assumption(v). Thus,G does not have a pole ats= 0 and we canconclude thatG is also bounded onBε(0), which shows thatG2 H∞(L(U)).
3. The case of generalGp can be dealt with by defining the inner product on the statespace alternatively as
hz;wiZ;new = h(Λ+ΓTGpΓ)z1;w1iZ1 + hz2;w2iZ1:
The whole analysis above goes through without change in this new inner product.From the positive-definiteness ofGp, it can easily be shown that the norm induced bythis new inner product is equivalent to the original norm. Hence, the system is alsostrongly stable with respect to the original state spaceZ
The assumptions(i) and (ii) are satisfied by most, if not all systems of interest.Assumption(iii) and(iv) depend on the actuators and sensors implemented. Note thatassumption(iv) concernsA2, not A. The reason is that the pair(A;Cr) can never beobservable; the position of the centre of mass and the attitude of the structure cannotbe reconstructed from the measurements of the rate sensor, because the dynamics doesnot depend on the position and attitude. The coupling introduced inA2 makes thedynamics dependent on them, and so it becomes possible to observe the position andthe attitude from the rate sensors.
Although for certain structures of practical interest assumption(v) will be satisfied,it still is quite restrictive. We used it in the general setup of the example in this section,because it leads to a fairly simple proof. We believe that in more specific examplesthis assumption can be relaxed.

152 Chapter 9. Examples of strongly stabilizable systems