Lecture #6 Lagrange's method (examples)
17
ME 563 Mechanical Vibrations Lecture #6 Lagrange’s Method for Deriving Equations of Motion (examples)
Transcript of Lecture #6 Lagrange's method (examples)
ME 563 Mechanical Vibrations
Lecture #6 Lagrange’s Method for
Deriving Equations of Motion (examples)
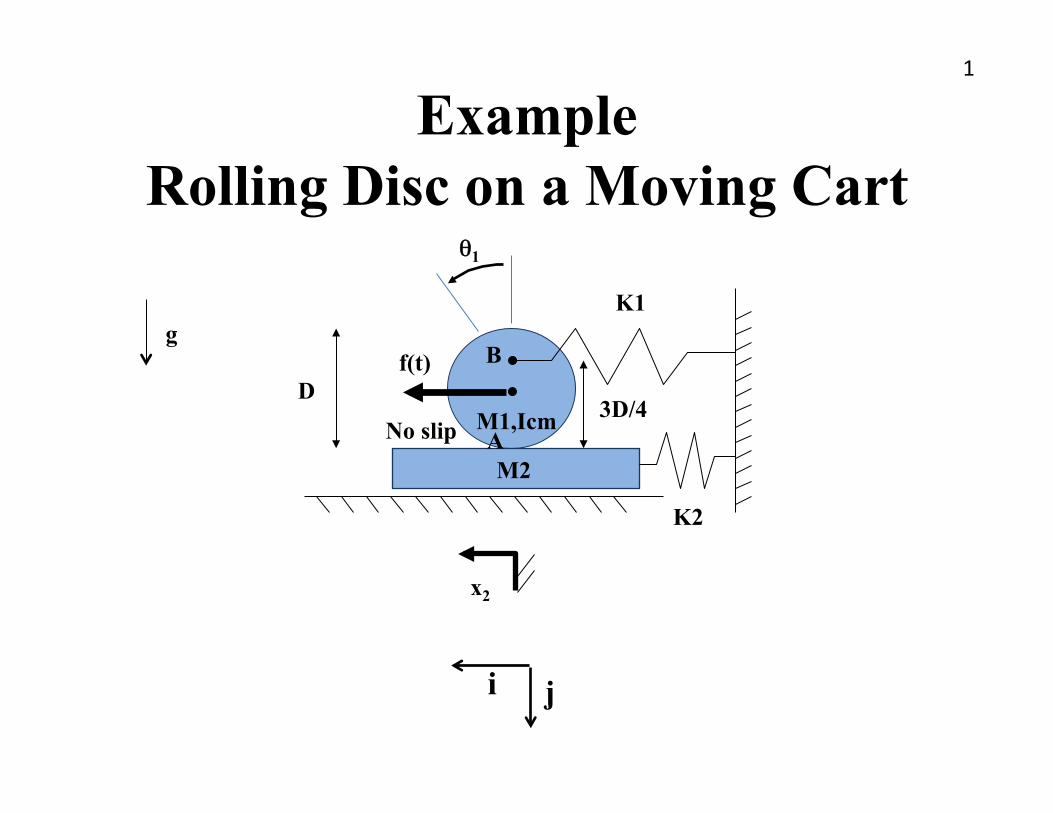
Example Rolling Disc on a Moving Cart
1
K1
f(t)
No slip 3D/4
D
K2
M1,Icm
M2
g
x2
θ1
A
B
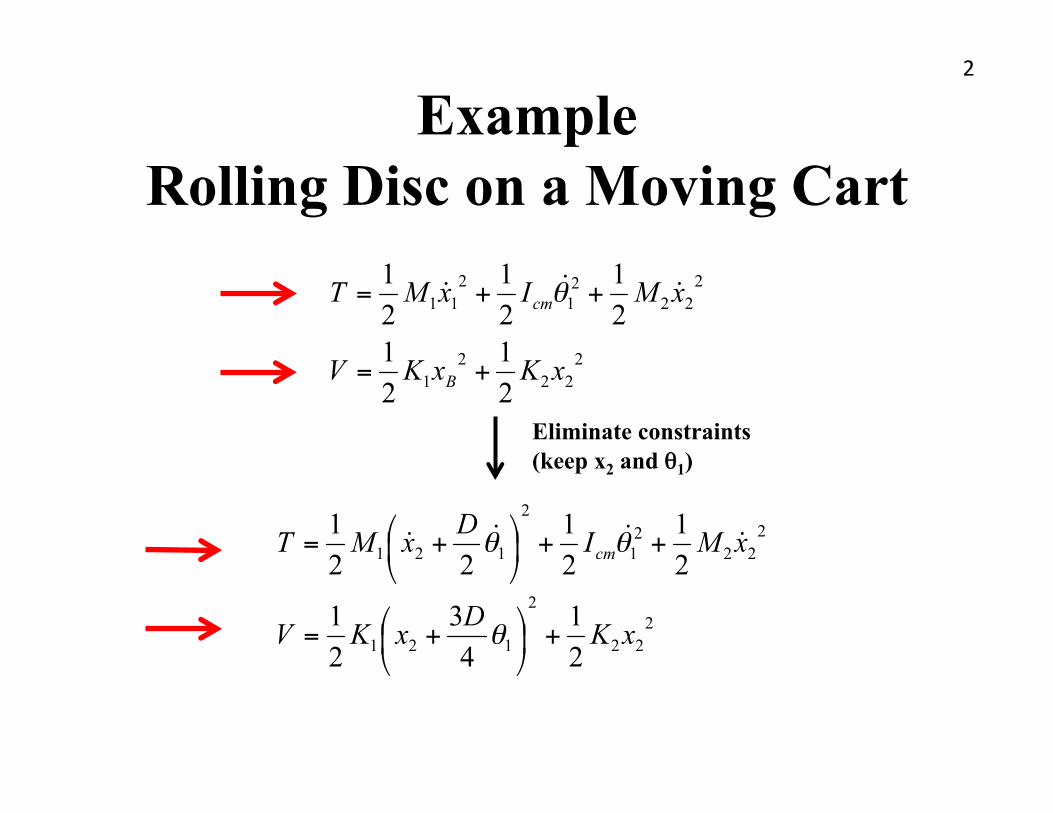
2
Eliminate constraints (keep x2 and θ1)
Example Rolling Disc on a Moving Cart
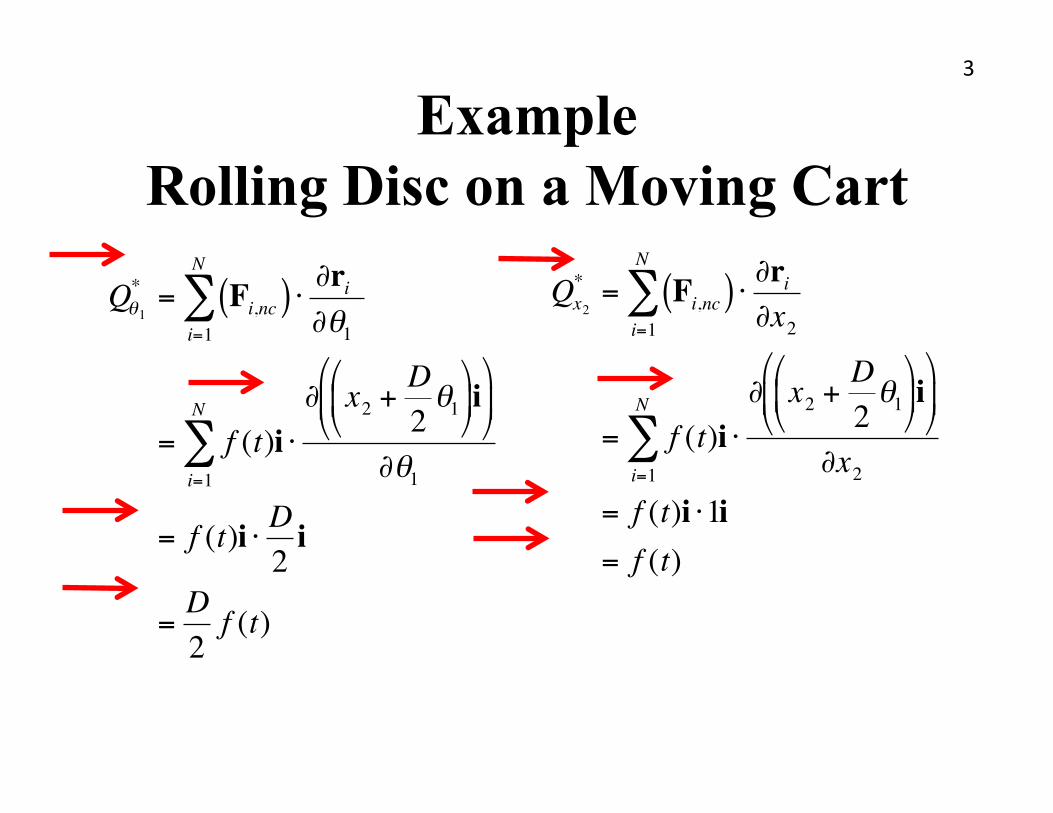
3
€
Qθ1
* = Fi,nc( )i=1
N
∑ ⋅∂ri∂θ1
= f (t)ii=1
N
∑ ⋅∂ x2 +
D2θ1
i
∂θ1
= f (t)i ⋅ D2i
=D2f (t)
€
Qx2* = Fi,nc( )
i=1
N
∑ ⋅∂ri∂x2
= f (t)ii=1
N
∑ ⋅∂ x2 +
D2θ1
i
∂x2= f (t)i ⋅1i= f (t)
Example Rolling Disc on a Moving Cart
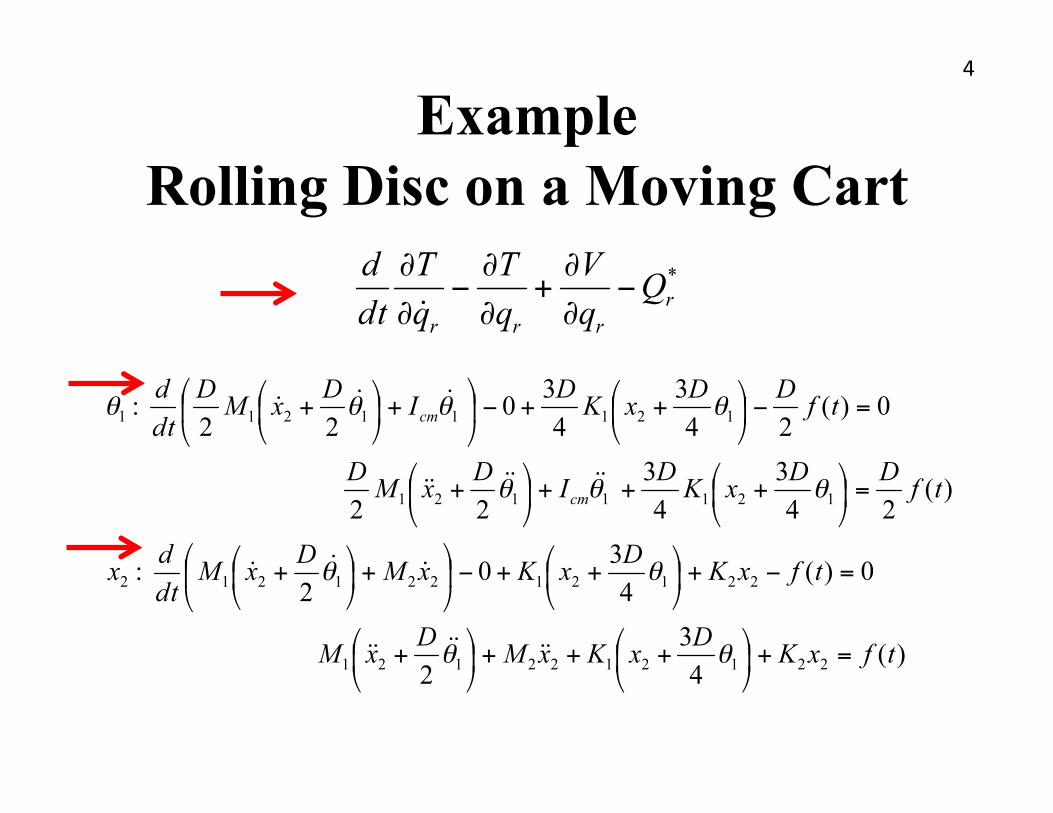
4
Example Rolling Disc on a Moving Cart
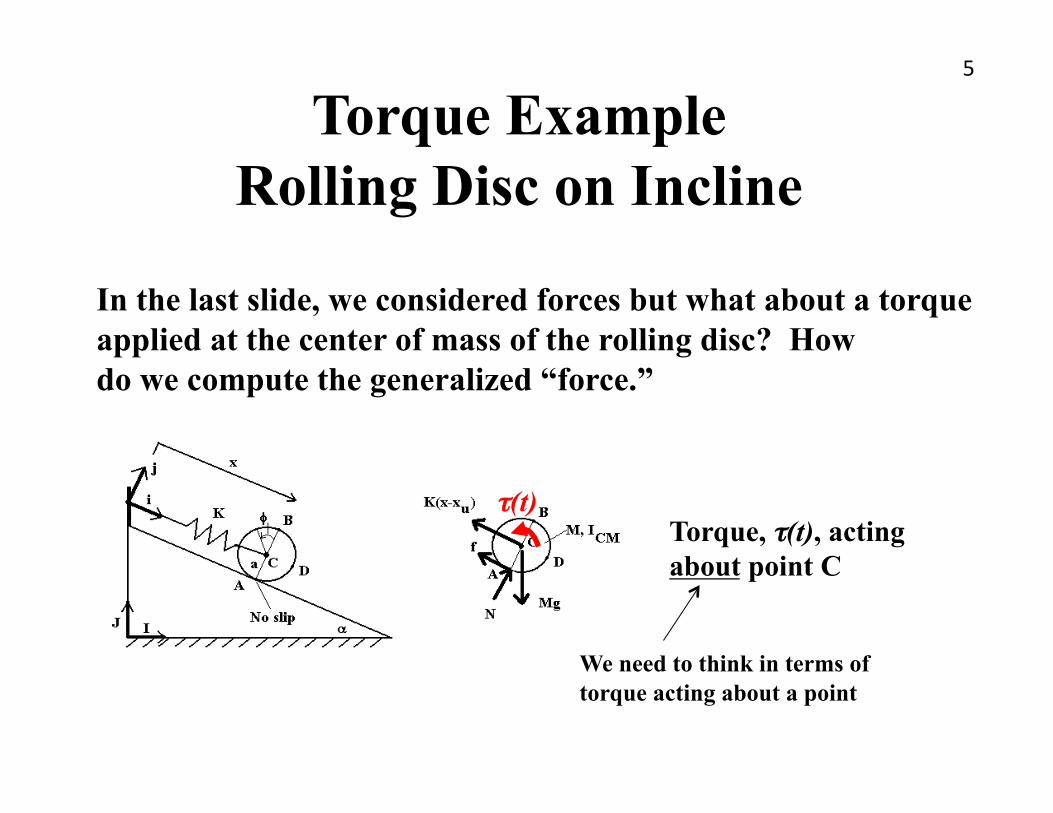
Torque Example Rolling Disc on Incline
5
Torque, τ(t), acting about point C
τ(t)
In the last slide, we considered forces but what about a torque applied at the center of mass of the rolling disc? How do we compute the generalized “force.”
We need to think in terms of torque acting about a point
Explanation Rolling Disc on Incline
6
There are several things to keep in mind with a torque:
- A torque is not a force; therefore, the generalized coordinate we need to use is φ not x. -Our intuition about torques and where they are applied can let us down; when we apply a torque, we say it is applied about a point in the plane, not at a point x. -To understand the solution, we can think in terms of the work done by the generalized “forces”; the work done by these forces must be equal to the actual work done by the forces and torques applied to the body.
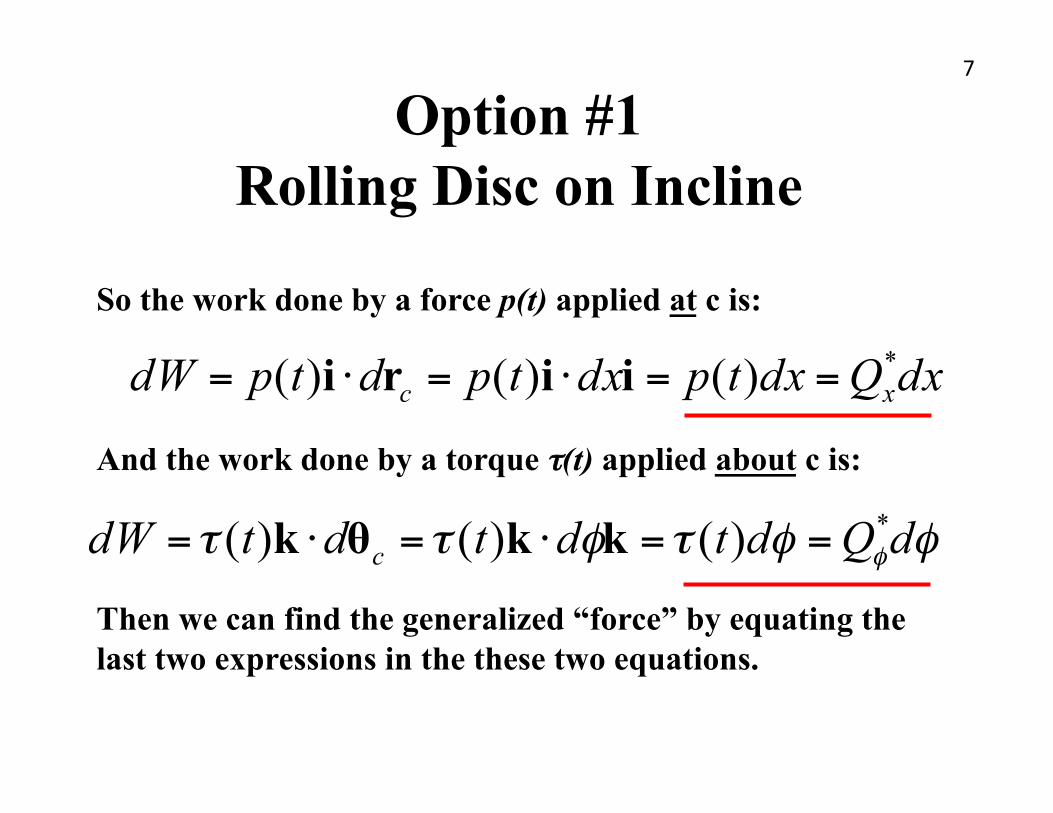
Option #1 Rolling Disc on Incline
7
So the work done by a force p(t) applied at c is:
And the work done by a torque τ(t) applied about c is:
Then we can find the generalized “force” by equating the last two expressions in the these two equations.
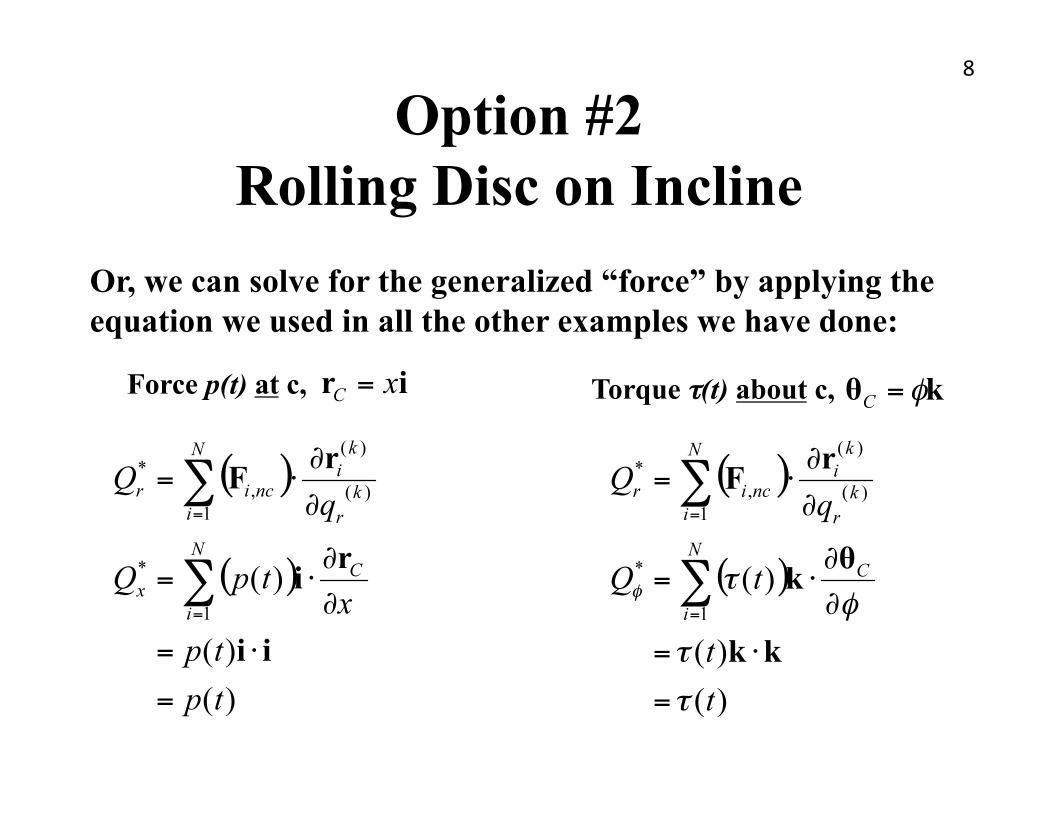
Option #2 Rolling Disc on Incline
8
Or, we can solve for the generalized “force” by applying the equation we used in all the other examples we have done:
Force p(t) at c, Torque τ(t) about c,
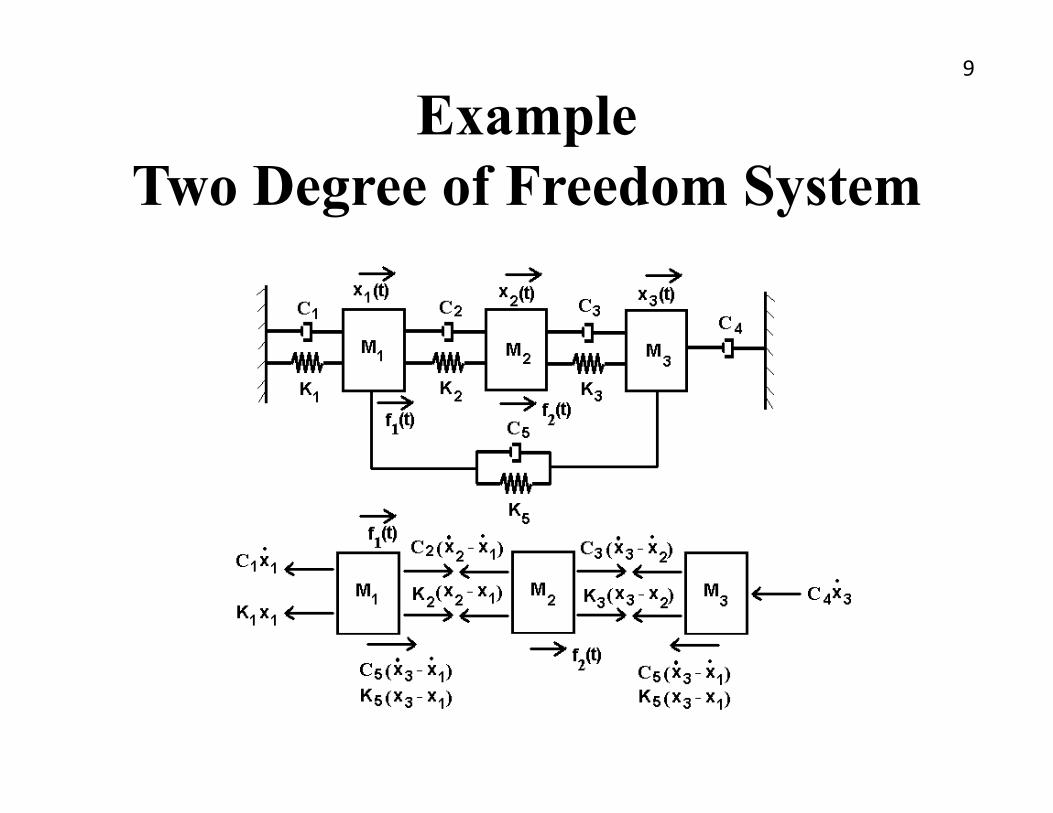
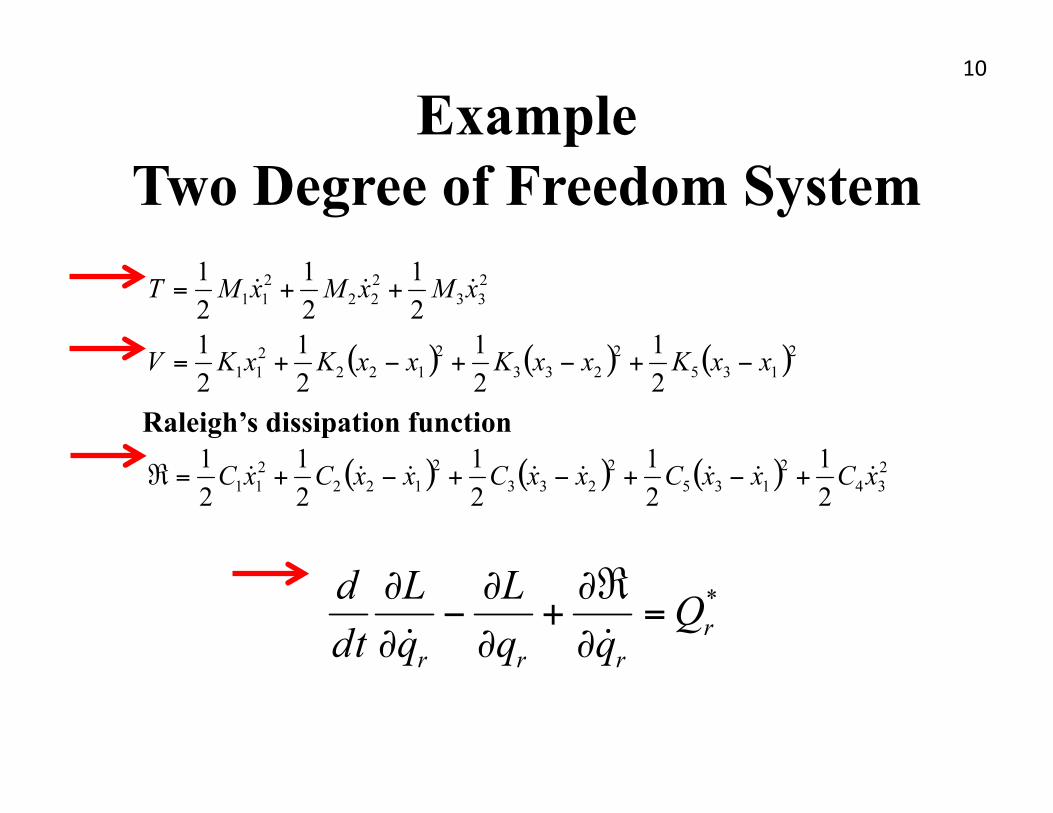
Example Two Degree of Freedom System
9
Example Two Degree of Freedom System
10
Raleigh’s dissipation function
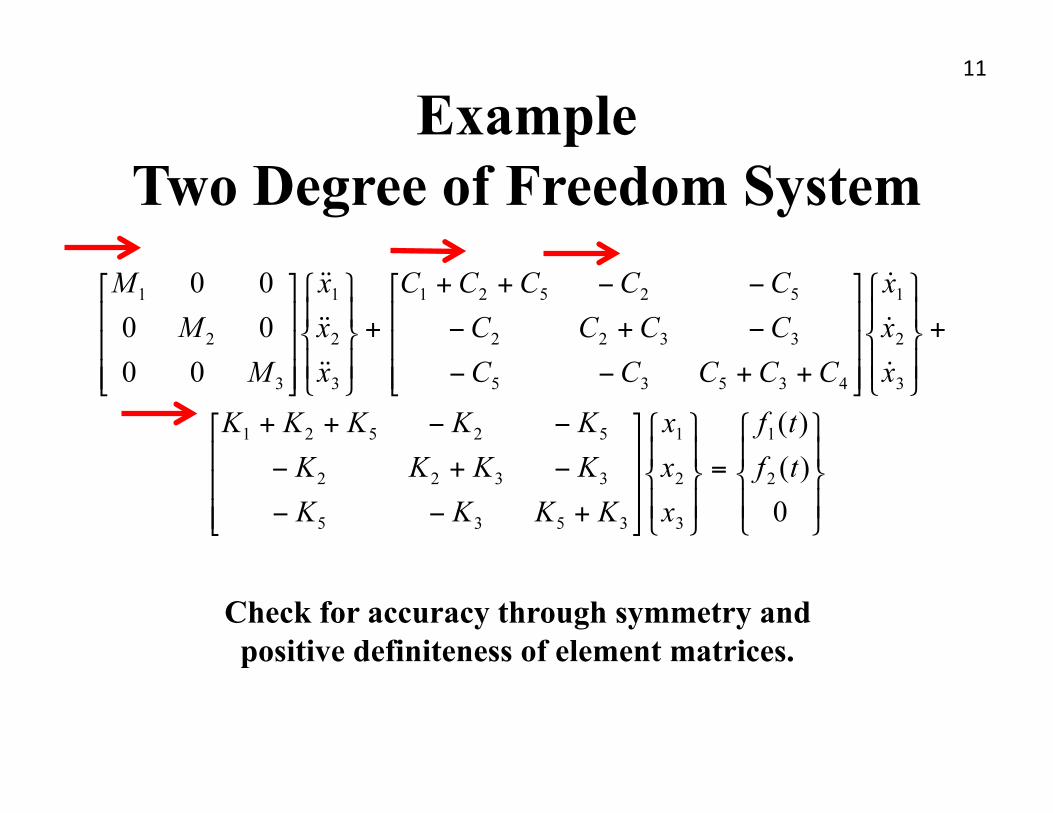
Example Two Degree of Freedom System
11
Check for accuracy through symmetry and positive definiteness of element matrices.
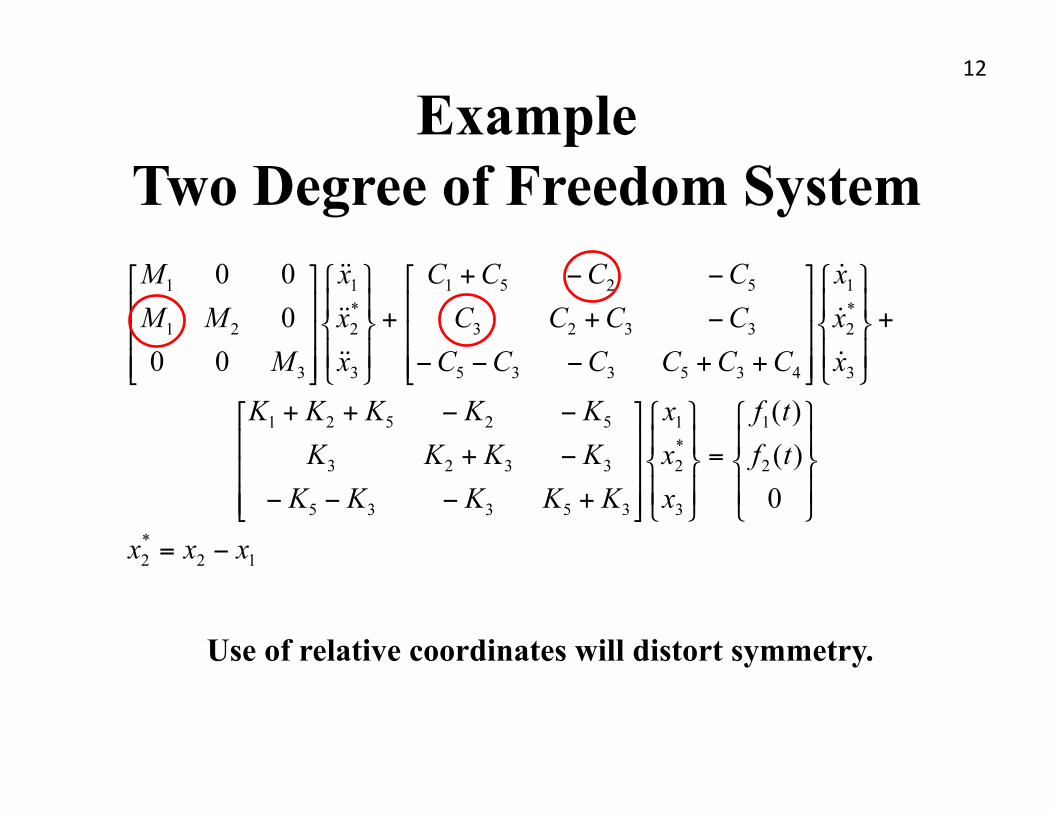
Example Two Degree of Freedom System
12
Use of relative coordinates will distort symmetry.
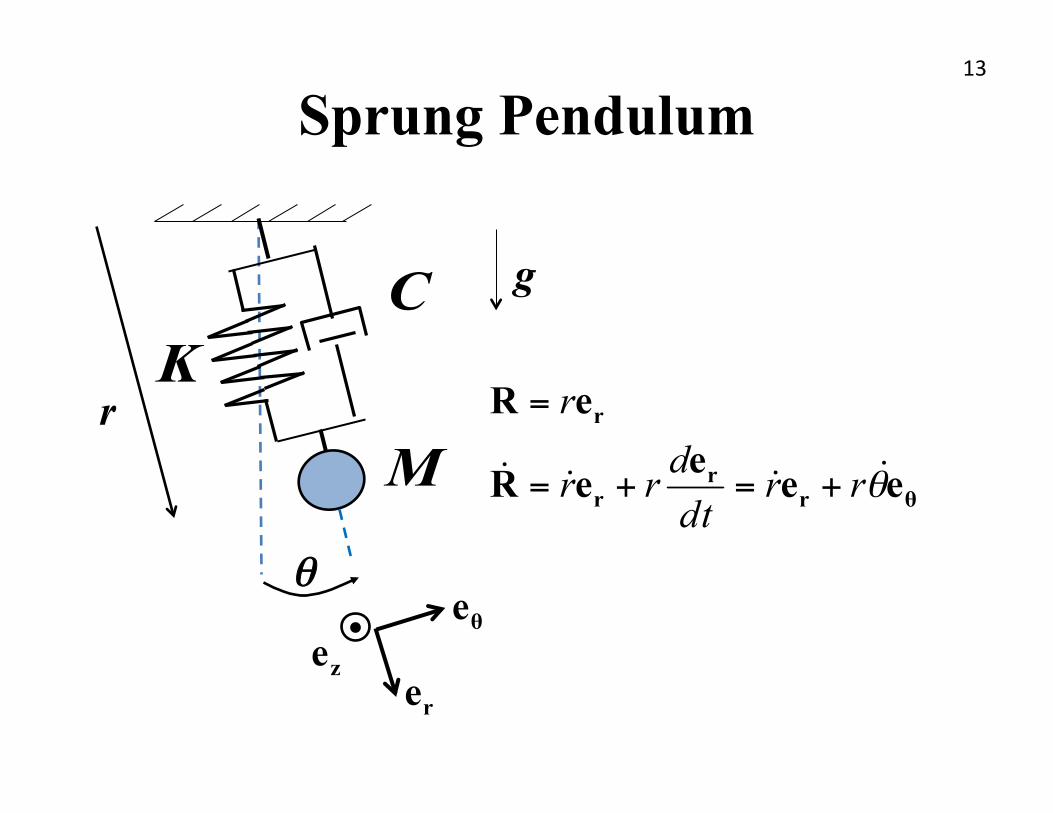
Sprung Pendulum 13
r
θ
g
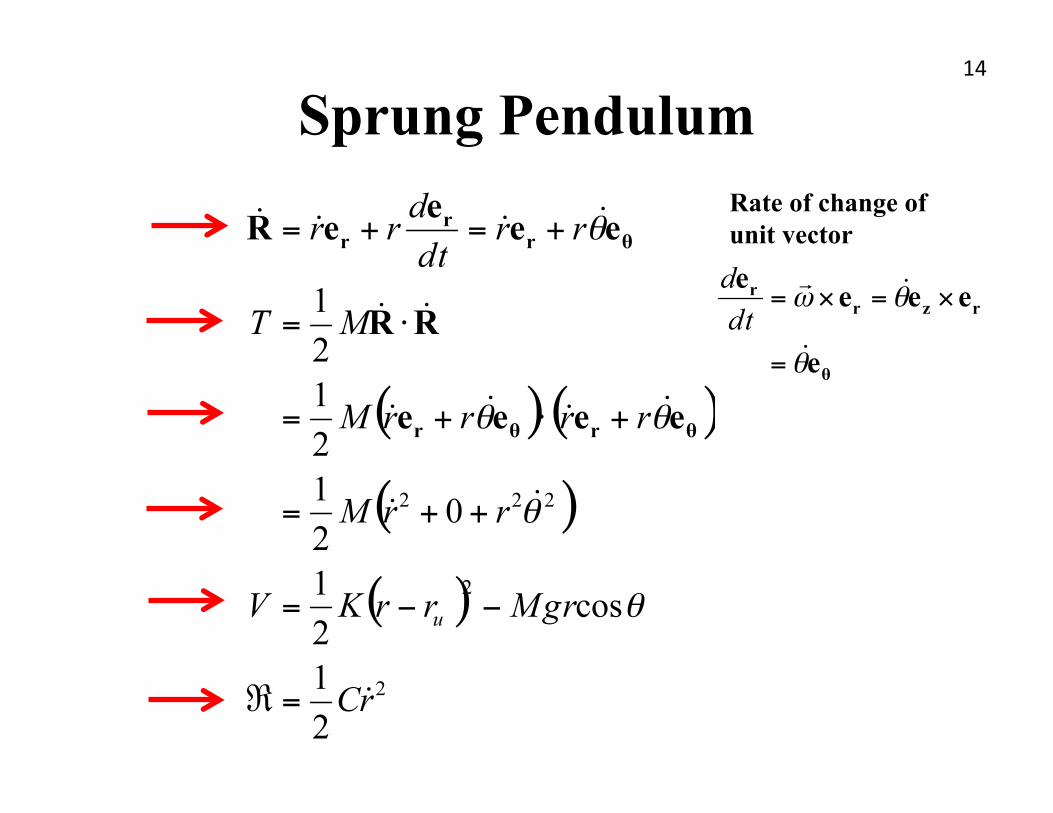
Sprung Pendulum 14
Rate of change of unit vector
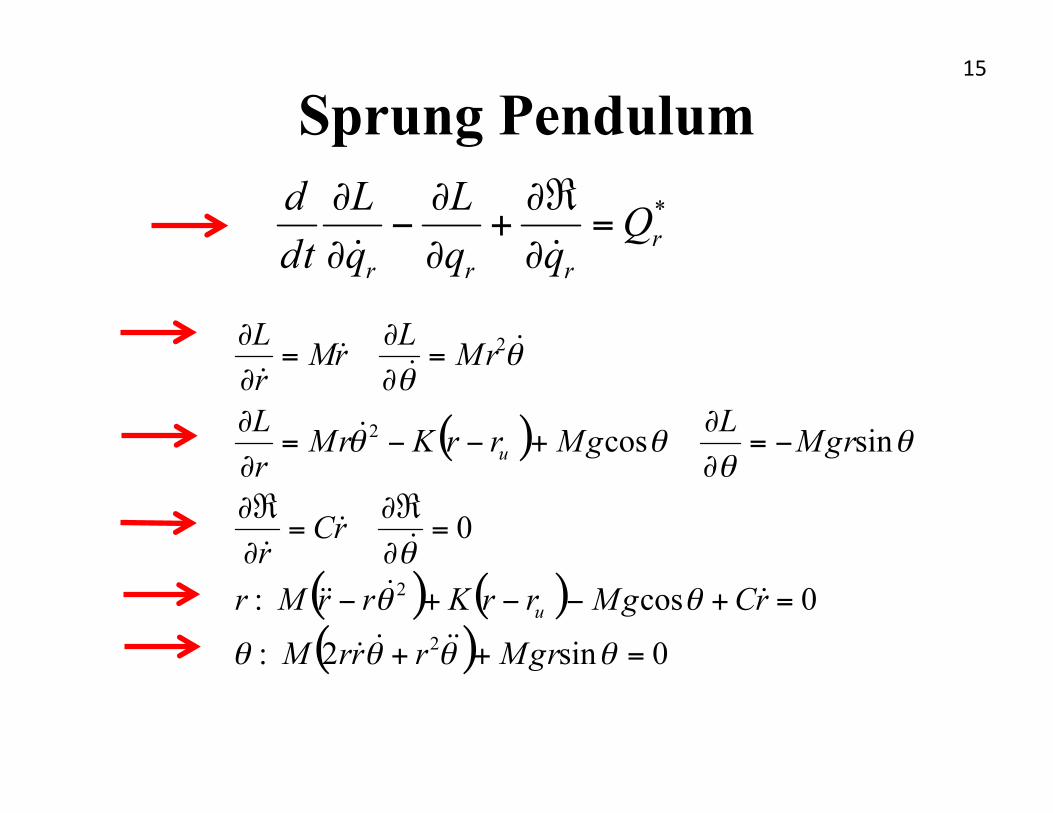
Sprung Pendulum 15
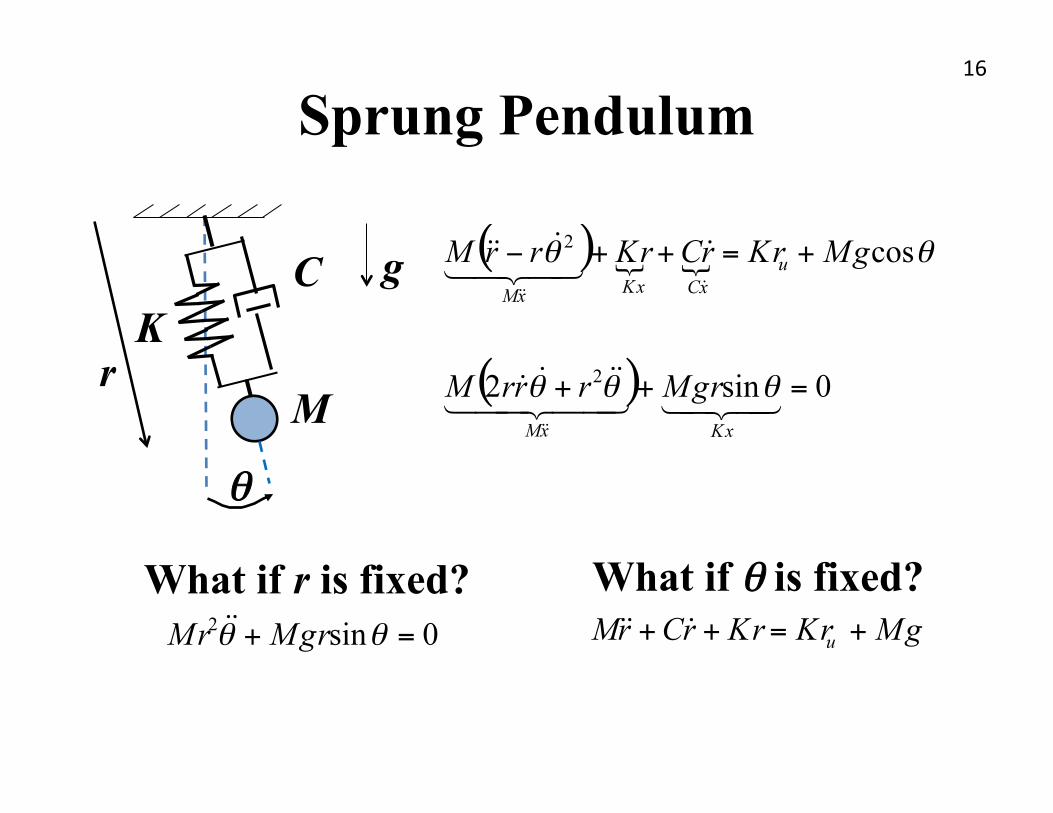
Sprung Pendulum 16
r
θ
g
What if r is fixed? What if θ is fixed?