Coupled Systems: Theory & Examples
48
Coupled Systems: Theory & Examples Lecture 1 Symmetry and Patterns of Oscillation Reference: The Symmetry Perspective (G. and Stewart). Japanese translation: Tanaka, Yamada, Takamatsu, and Nakagaki Maruzen Publishing, 2003 Martin Golubitsky Department of Mathematics University of Houston http://www.math.uh.edu/ e mg/ – p. 1/3
Transcript of Coupled Systems: Theory & Examples

Coupled Systems: Theory & ExamplesLecture 1
Symmetry andPatterns of Oscillation
Reference: The Symmetry Perspective (G. and Stewart).Japanese translation: Tanaka, Yamada, Takamatsu, and NakagakiMaruzen Publishing, 2003
Martin GolubitskyDepartment of Mathematics
University of Houstonhttp://www.math.uh.edu/emg/
– p. 1/30

Thanks
Ian Stewart Warwick
Luciano Buono Oshawa
Jim Collins Boston University
– p. 2/30

Two Identical Cells1 2 x1 = f(x1, x2)
x2 = f(x2, x1)
σ(x1, x2) = (x2, x1) is a symmetry
Fix(σ) = {x1 = x2} is flow invariantSynchrony is robustExpect synchronous periodic solutions
Time-periodic solutions exist robustly wheretwo cells oscillate a half-period out of phase
x2(t) = x1(t +1
2)
– p. 3/30

Symmetry OverviewA symmetry of a DiffEq x = f(x) is a linear map γ where
γ(sol’n) = sol’n ⇐⇒ f(γx) = γf(x)
Fix(Σ) = {x ∈ Rn : σx = x ∀σ ∈ Σ} is flow invariant
Proof: f(x) = f(σx) = σf(x)
Network symmetries are permutation symmetriesSynchrony is robust in symmetric coupled systems
Symmetry group Γ is a modeling assumption
Network architecture is also a modeling assumption
– p. 4/30

Symmetry OverviewA symmetry of a DiffEq x = f(x) is a linear map γ where
γ(sol’n) = sol’n ⇐⇒ f(γx) = γf(x)
Fix(Σ) = {x ∈ Rn : σx = x ∀σ ∈ Σ} is flow invariant
Proof: f(x) = f(σx) = σf(x)
Network symmetries are permutation symmetriesSynchrony is robust in symmetric coupled systems
Symmetry group Γ is a modeling assumption
Network architecture is also a modeling assumption
– p. 4/30

Symmetry OverviewA symmetry of a DiffEq x = f(x) is a linear map γ where
γ(sol’n) = sol’n ⇐⇒ f(γx) = γf(x)
Fix(Σ) = {x ∈ Rn : σx = x ∀σ ∈ Σ} is flow invariant
Proof: f(x) = f(σx) = σf(x)
Network symmetries are permutation symmetriesSynchrony is robust in symmetric coupled systems
Symmetry group Γ is a modeling assumption
Network architecture is also a modeling assumption
– p. 4/30

Spatio-Temporal SymmetriesLet x(t) be a time-periodic solution• K = {γ ∈ Γ : γx(t) = x(t)} space symmetries
• H = {γ ∈ Γ : γ{x(t)} = {x(t)}} spatiotemporal symm’s
Facts:
• γ ∈ H =⇒ θ ∈ S1 such that γx(t) = x(t + θ)
• H/K is cyclic sinceγ 7→ θ is a homomorphism with kernel K
• Hyperbolic H/K periodic solutions are robust
– p. 5/30

Spatio-Temporal SymmetriesLet x(t) be a time-periodic solution• K = {γ ∈ Γ : γx(t) = x(t)} space symmetries
• H = {γ ∈ Γ : γ{x(t)} = {x(t)}} spatiotemporal symm’s
Facts:
• γ ∈ H =⇒ θ ∈ S1 such that γx(t) = x(t + θ)
• H/K is cyclic sinceγ 7→ θ is a homomorphism with kernel K
• Hyperbolic H/K periodic solutions are robust
– p. 5/30

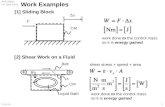
Three-Cell Unidirectional Ring: Γ = Z3
1
2 3
x1 = f(x1, x3)
x2 = f(x2, x1)
x3 = f(x3, x2)
Discrete rotating waves: H = Z3, K = 1
0 5 10 15−0.2
−0.1
0
0.1
0.2
x 1
0 5 10 15−0.2
−0.1
0
0.1
0.2
x 2
0 5 10 15−0.2
−0.1
0
0.1
0.2
x 3
0 5 10 15−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
t
– p. 6/30

Three-Cell Bidirectional Ring: Γ = S3
1
2 3
x1 = f(x1, x2, x3)
x2 = f(x2, x3, x1) f(x2, x1, x3) = f(x2, x3, x1)
x3 = f(x3, x1, x2)
{x1 = x2 = x3} and {xi = xj} are synchrony subspaces
Discrete rotating waves: H = Z3, K = 1
x2(t) = x1
(
t + 1
3
)
and x3(t) = x2
(
t + 1
3
)
Out-of-phase periodic solutions: H = Z2(1 3), K = 1
x3(t) = x1
(
t + 1
2
)
and x2(t) = x2
(
t + 1
2
)
G. and Stewart (1986)
– p. 7/30

Three-Cell Bidirectional Ring: Γ = S3
1
2 3
x1 = f(x1, x2, x3)
x2 = f(x2, x3, x1) f(x2, x1, x3) = f(x2, x3, x1)
x3 = f(x3, x1, x2)
{x1 = x2 = x3} and {xi = xj} are synchrony subspaces
Discrete rotating waves: H = Z3, K = 1
x2(t) = x1
(
t + 1
3
)
and x3(t) = x2
(
t + 1
3
)
Out-of-phase periodic solutions: H = Z2(1 3), K = 1
x3(t) = x1
(
t + 1
2
)
and x2(t) = x2
(
t + 1
2
)
G. and Stewart (1986)
– p. 7/30

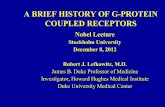
A Three-Cell System (2)
0 5 10 15−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
t
– p. 8/30

The H/K TheoremLet Γ be a finite group acting on R
n
There exists hyperbolic periodic soln to someΓ-symmetric system on R
n with space symmetries Kand spatiotemporal symmetries H if and only if
(a) H/K is cyclic
(b) K is an isotropy subgroup
(c) dim Fix(K) ≥ 2If dim Fix(K) = 2, then either H = K or H = N(K)
(d) H fixes a connected component of Fix(K) \ LK
whereLK =
⋃
γ 6∈K
Fix(γ) ∩ Fix(K)
– p. 9/30

The H/K TheoremLet Γ be a finite group acting on R
n
There exists hyperbolic periodic soln to someΓ-symmetric system on R
n with space symmetries Kand spatiotemporal symmetries H if and only if
(a) H/K is cyclic
(b) K is an isotropy subgroup
(c) dim Fix(K) ≥ 2If dim Fix(K) = 2, then either H = K or H = N(K)
(d) H fixes a connected component of Fix(K) \ LK
whereLK =
⋃
γ 6∈K
Fix(γ) ∩ Fix(K)
– p. 9/30

LK (1)γFix(K) = Fix(γKγ−1)
. Suppose h ∈ H ⊂ N(K) then
Suppose kx = x. Then
γkγ−1(γx) = γkx = γx
h Fix(K) = Fix(K)
h (Fix(γ) ∩ Fix(K)) = Fix(hγh−1) ∩ Fix(K)
If γ 6∈ K, then hγh−1 6∈ hKh−1 = K. Since
LK =⋃
γ 6∈K
Fix(γ) ∩ Fix(K)
it follows that h ∈ H implies h : LK → LK
Therefore h permutes connected components ofcomplement of LK in Fix(K)
– p. 10/30

LK (1)γFix(K) = Fix(γKγ−1) . Suppose h ∈ H ⊂ N(K) then
h Fix(K) = Fix(K)
h (Fix(γ) ∩ Fix(K)) = Fix(hγh−1) ∩ Fix(K)
If γ 6∈ K, then hγh−1 6∈ hKh−1 = K. Since
LK =⋃
γ 6∈K
Fix(γ) ∩ Fix(K)
it follows that h ∈ H implies h : LK → LK
Therefore h permutes connected components ofcomplement of LK in Fix(K)
– p. 10/30

LK (1)γFix(K) = Fix(γKγ−1) . Suppose h ∈ H ⊂ N(K) then
h Fix(K) = Fix(K)
h (Fix(γ) ∩ Fix(K)) = Fix(hγh−1) ∩ Fix(K)
since h(Fix(γ) ∩ Fix(K)) = h(Fix(γ)) ∩ h(Fix(K))
If γ 6∈ K, then hγh−1 6∈ hKh−1 = K. Since
LK =⋃
γ 6∈K
Fix(γ) ∩ Fix(K)
it follows that h ∈ H implies h : LK → LK
Therefore h permutes connected components ofcomplement of LK in Fix(K)
– p. 10/30

LK (1)γFix(K) = Fix(γKγ−1) . Suppose h ∈ H ⊂ N(K) then
h Fix(K) = Fix(K)
h (Fix(γ) ∩ Fix(K)) = Fix(hγh−1) ∩ Fix(K)
If γ 6∈ K, then hγh−1 6∈ hKh−1 = K. Since
LK =⋃
γ 6∈K
Fix(γ) ∩ Fix(K)
it follows that h ∈ H implies h : LK → LK
Therefore h permutes connected components ofcomplement of LK in Fix(K)
– p. 10/30

LK (1)γFix(K) = Fix(γKγ−1) . Suppose h ∈ H ⊂ N(K) then
h Fix(K) = Fix(K)
h (Fix(γ) ∩ Fix(K)) = Fix(hγh−1) ∩ Fix(K)
If γ 6∈ K, then hγh−1 6∈ hKh−1 = K. Since
LK =⋃
γ 6∈K
Fix(γ) ∩ Fix(K)
it follows that h ∈ H implies h : LK → LK
Therefore h permutes connected components ofcomplement of LK in Fix(K)
– p. 10/30

LK (2)
��
��
x(t)Fix(K)
�����������������
�����������������
Fix(γ3)Fix(γ2)
Fix(γ1)
��
��
��
��
��
���
BBBBBBBBBBBBB
H fixes conn. comp. of Fix(K) \ LK containing x(t)
Buono and G. (2001)
– p. 11/30

dim Fix(K) = 2; H 6= K
N(K)/K ⊂ O(2) acts on Fix(K)
N(K)/K ∼=
{
Zk k ≥ 2
Dk k ≥ 1
In case Dk, every nonidentity element in N(K)/K
moves x(t) to new connected component of R2 \ LK .
There is a nonidentity element in H/K. Contradiction.So N(K)/K ∼= Zk.In case Zk, let h ∈ H be nontrivial rotation on R
2
h{x(t)} = {x(t)} implies 0 ∈ Int{x(t)}
Then σ ∈ N(K) satisfies σ{x(t)} ∩ {x(t)} 6= ∅.Hence σ{x(t)} = {x(t)} and H = N(K)
– p. 12/30

dim Fix(K) = 2; H 6= K
N(K)/K ⊂ O(2) acts on Fix(K)
N(K)/K ∼=
{
Zk k ≥ 2
Dk k ≥ 1
In case Dk, every nonidentity element in N(K)/K
moves x(t) to new connected component of R2 \ LK .
There is a nonidentity element in H/K. Contradiction.So N(K)/K ∼= Zk.
In case Zk, let h ∈ H be nontrivial rotation on R2
h{x(t)} = {x(t)} implies 0 ∈ Int{x(t)}
Then σ ∈ N(K) satisfies σ{x(t)} ∩ {x(t)} 6= ∅.Hence σ{x(t)} = {x(t)} and H = N(K)
– p. 12/30

dim Fix(K) = 2; H 6= K
N(K)/K ⊂ O(2) acts on Fix(K)
N(K)/K ∼=
{
Zk k ≥ 2
Dk k ≥ 1
In case Dk, every nonidentity element in N(K)/K
moves x(t) to new connected component of R2 \ LK .
There is a nonidentity element in H/K. Contradiction.So N(K)/K ∼= Zk.In case Zk, let h ∈ H be nontrivial rotation on R
2
h{x(t)} = {x(t)} implies 0 ∈ Int{x(t)}
Then σ ∈ N(K) satisfies σ{x(t)} ∩ {x(t)} 6= ∅.Hence σ{x(t)} = {x(t)} and H = N(K)
– p. 12/30

dim Fix(K) = 2; H 6= K
N(K)/K ⊂ O(2) acts on Fix(K)
N(K)/K ∼=
{
Zk k ≥ 2
Dk k ≥ 1
In case Dk, every nonidentity element in N(K)/K
moves x(t) to new connected component of R2 \ LK .
There is a nonidentity element in H/K. Contradiction.So N(K)/K ∼= Zk.In case Zk, let h ∈ H be nontrivial rotation on R
2
h{x(t)} = {x(t)} implies 0 ∈ Int{x(t)}
Then σ ∈ N(K) satisfies σ{x(t)} ∩ {x(t)} 6= ∅.Hence σ{x(t)} = {x(t)} and H = N(K)
– p. 12/30

Polyrhythms1 2
4 5
3
Symmetry group of five-cell system is Z3 × Z2∼= Z6
Coordinates = (x, y) ∈ (Rk)3 × (R`)2
Let σ = (ρ, τ) be generator of Z3 × Z2.
Periodic solutions with (H,K) = (Z6,1) can exist if ` > 1
Fix(1) = {(x, y)} Fix(σ2) = {(x, y) : x1 = x2 = x3}
Fix(σ3) = {(x, y) : y1 = y2} Fix(σ) = Fix(σ2) ∩ Fix(σ3)
– p. 13/30

Polyrhythms (2)(σ2, 1/3) =⇒ 3-cell ring exhibits rotating wave(σ3, 1/2) =⇒ 2-cell ring is out-of-phase(σ , 1/6) =⇒ triple 2-cell freq = double 3-cell freq
0 2 4 6 8 10 12 14 16 18 20−1.5
−1
−0.5
0
0.5
1
1.5
2
t
cells
1−2
−3
0 2 4 6 8 10 12 14 16 18 20−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
t
cells
4−5
0 2 4 6 8 10 12 14 16 18 20−1.5
−1
−0.5
0
0.5
1
1.5
2
t
cells
1−4
−1.5 −1 −0.5 0 0.5 1 1.5 2−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
cell 1
cell 4
– p. 14/30

Standard GaitsBound of the Siberian Souslik
Amble of the Elephant
Trot of the HorseThanks to: Sue Morris at http://www.classicaldressage.co.uk
– p. 15/30

Standard GaitsBound of the Siberian Souslik
Amble of the Elephant
Trot of the HorseThanks to: Sue Morris at http://www.classicaldressage.co.uk
– p. 15/30

Standard GaitsBound of the Siberian Souslik
Amble of the Elephant
Trot of the HorseThanks to: Sue Morris at http://www.classicaldressage.co.uk
– p. 15/30

Standard Gait Phases
0
0 1/2
1/20 1/2
1/4 3/4
0
0
1/2
1/2
0 0
1/2 1/2
0
1/2
0.1
0.6
0
1/2
0 0
0 0
WALK PACE TROT BOUND
TRANSVERSEGALLOP
ROTARYGALLOP
PRONK0.1
0.6
– p. 16/30

Gait SymmetriesGait Spatio-temporal symmetriesTrot (Left/Right, 1
2) and (Front/Back, 1
2)
Pace (Left/Right, 1
2) and (Front/Back, 0)
Walk (Figure Eight, 1
4)
0 1 1/4
JUMP:
0 1/4 1/2 3/4 1
WALK:
0 1/2 1
BOUND:
0 1/2 1
PACE:
0 1
TROT:
0 1/2 1PRONK:
1/2
Collins and Stewart (1993)
– p. 17/30

Central Pattern Generators (CPG)Assumption: There is a network in the nervous system thatproduces the characteristic rhythms of each gait
CPG is network of neurons; neurons modeled by ODEsLocomotor CPG’s modeled by coupled cell systemsKopell and Ermentrout (1986, 1988, 1990);Rand, Cohen, and Holmes (1988); etc.
Design simplest network to produce walk, trot, and pace
Guess at simplest networkOne cell ‘signals’ each leg
1 2
43
– p. 18/30

Central Pattern Generators (CPG)Assumption: There is a network in the nervous system thatproduces the characteristic rhythms of each gait
CPG is network of neurons; neurons modeled by ODEsLocomotor CPG’s modeled by coupled cell systemsKopell and Ermentrout (1986, 1988, 1990);Rand, Cohen, and Holmes (1988); etc.
Design simplest network to produce walk, trot, and pace
Guess at simplest networkOne cell ‘signals’ each leg
1 2
43
– p. 18/30

Four Cells Do Not SufficeΓ = symmetry group of locomotor CPG network
Network produces walk. There is a four-cycle
(1 3 2 4) ∈ Γ
Four-cycle permutes pace to trot
PACE TROT
1 2
3 4
1 2
3 4
CPG cannot be modeled by four-cell networkwhere each cell gives rhythmic pulsing to one leg
– p. 19/30

Simplest Coupled Cell Gait ModelUse gait symmetries to construct coupled network1) walk =⇒ four-cycle ω in symmetry group2) pace or trot =⇒ transposition κ in symmetry group3) Simplest network
LF
LH RH
RF
LH
LF RF
RH
1 2
3 4
5 6
7 8
Γ = Z4(ω) × Z2(κ) is abelian
– p. 20/30

Trot from SymmetriesH = Z4(ω) × Z2(κ) and K = Z4(κω)
x7(t) x8(t)
x5(t) x6(t)
x3(t) x4(t)
x1(t) x2(t)
κω⇒
x2(t) x1(t)
x1(t) x2(t)
x2(t) x1(t)
x1(t) x2(t)
(κ, 12)
⇒
x1(t + 12) x1(t)
x1(t) x1(t + 12)
x1(t + 12) x1(t)
x1(t) x1(t + 12)
– p. 21/30

Primary Gaits: H = Γ = Z4(ω) × Z2(κ)
K Γ/K Phase Diagram Gait
Γ 1
0
@
0 0
0 0
1
A pronk
< ω > Z2
0
@
0 1
2
0 1
2
1
A pace
< κω > Z2
0
@
1
20
0 1
2
1
A trot
< κ, ω2 > Z2
0
@
0 0
1
2
1
2
1
A bound
< κω2 > Z4
0
@
±1
4±
3
4
0 1
2
1
A walk±
< κ > Z4
0
@
0 0
±1
4±
1
4
1
A jump±
• Primary gaits occur by Hopf bifurcation from stand
– p. 22/30

The Jump
Average Right Rear to Right Front = 31.2 frames
Average Right Front to Right Rear = 11.4 frames
31.211.4
= 2.74
– p. 23/30

Secondary Quadrupedal Gaits
H K name LH RH LF RF
κω κω loping trot x1(t) x2(t) x2(t) x1(t)
ω2 rotary gallop x1(t) x2(t) x2(t + 1
2) x1(t + 1
2)
1 rotary x1(t) x2(t) x2(t + 1
4) x1(t + 1
4)
ricocheting jump x1(t) x2(t) x2(t −1
4) x1(t −
1
4)
ω ω loping rack x1(t) x2(t) x1(t) x2(t)
ω2 transverse gallop x1(t) x2(t) x1(t + 1
2) x2(t + 1
2)
1 transverse x1(t) x2(t) x1(t + 1
4) x2(t + 1
4)
ricocheting jump x1(t) x2(t) x1(t −1
4) x2(t −
1
4)
κ, ω2 κ, ω2 loping bound x1(t) x1(t) x3(t) x3(t)
ω2 running walk x1(t) x1(t + 1
2) x3(t) x3(t + 1
2)
– p. 24/30

Primary Versus Secondary Gaits
Distinction should be observable using duty factor
Duty factors of fore legs of walking horse are equal
Duty factors of fore legs of galloping cat are different
– p. 25/30

Primary Gait: Horse Walk
Horizontal bars indicate contact with ground
– p. 26/30

Secondary Gait: Cat Rotary Gallop
Horizontal bars indicate contact with ground
– p. 27/30

Biped Network
LF
LH RH
RF
LH
LF RF
RH
1 2
3 4
5 6
7 8
3 4
1 2
left right
– p. 28/30

Biped Prediction
0 0.5 0.5 0
left right
0 0.5
left right
0 0.5
(b)(a)
– p. 29/30

Biped Gaits: Walk and Run
0 0.5 0.5 0
left right
0 0.5
left right
0 0.5
(b)(a)
Cells control timing of muscle groups
Electromyographic signals from ankle muscles
During walking: gastrocnemius (GA) andtibialis anterior (TA) are activated out-of-phase
During running: (GA) and (TA) are co-activated
– p. 30/30

Biped Gaits: Walk and Run
0 0.5 0.5 0
left right
0 0.5
left right
0 0.5
(b)(a)
Cells control timing of muscle groups
Electromyographic signals from ankle muscles
During walking: gastrocnemius (GA) andtibialis anterior (TA) are activated out-of-phase
During running: (GA) and (TA) are co-activated
– p. 30/30

Biped Gaits: Walk and Run
0 0.5 0.5 0
left right
0 0.5
left right
0 0.5
(b)(a)
Cells control timing of muscle groups
Electromyographic signals from ankle muscles
During walking: gastrocnemius (GA) andtibialis anterior (TA) are activated out-of-phase
During running: (GA) and (TA) are co-activated
– p. 30/30

Biped Gaits: Walk and Run
0 0.5 0.5 0
left right
0 0.5
left right
0 0.5
(b)(a)
Cells control timing of muscle groups
Electromyographic signals from ankle muscles
During walking: gastrocnemius (GA) andtibialis anterior (TA) are activated out-of-phase
During running: (GA) and (TA) are co-activated
– p. 30/30