Chapter 8humanic/p111_lecture16.pdf · For point 1 on the blade, find the magnitude of (a) ......
28
Chapter 8 Rotational Kinematics
Transcript of Chapter 8humanic/p111_lecture16.pdf · For point 1 on the blade, find the magnitude of (a) ......

Chapter 8
RotationalKinematics

8.3 The Equations of Rotational Kinematics

8.4 Angular Variables and Tangential Variables
velocityl tangentia=Tvr
speed l tangentia=Tv
The relationship between the (tangential) arc length, s,at some radius, r, and the angular displacement, θ, has been shown to be
s = rθ (θ in radians)
Let’s find other relationships between the angularand tangential variables.
Consider skaters “cracking-the-whip” :

8.4 Angular Variables and Tangential Variables
!"
#$%
&===t
rtr
tsvT
'' t!
" =
rad/s)in ( !!rvT =

8.4 Angular Variables and Tangential Variables
( ) ( )t
rtrr
tvv
a ooToTT
!!!! "=
"=
"=
to!!
"#
=
)rad/sin ( 2!!raT =
The tangential acceleration, aT, is the changeof the tangential velocity per time:

8.4 Angular Variables and Tangential Variables
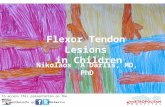
Example 6 A Helicopter Blade
A helicopter blade has an angular speed of 6.50 rev/s and anangular acceleration of 1.30 rev/s2.For point 1 on the blade, findthe magnitude of (a) thetangential speed and (b) thetangential acceleration.

8.4 Angular Variables and Tangential Variables
srad 8.40rev 1rad 2
srev 50.6 =!
"
#$%
&!"
#$%
&='
(
( )( ) sm122srad8.40m 3.00 === !rvT rω

8.4 Angular Variables and Tangential Variables
( )( ) 22 sm5.24srad17.8m 3.00 === !raT
22 srad 17.8
rev 1rad 2
srev 30.1 =!
"
#$%
&!"
#$%
&='
(

8.5 Centripetal Acceleration and Tangential Acceleration
( ) rad/s)in ( 222
!!! rrr
rva T
c ===
In uniform circular motion, the only accelerationpresent is the centripetal acceleration.
In nonuniform circular motion, there are both acentripetal and a tangential acceleration.
)rad/sin ( 2!!raT =

8.5 Centripetal Acceleration and Tangential Acceleration
Example 7 A Discus Thrower
Starting from rest, the throweraccelerates the discus to a finalangular speed of +15.0 rad/s ina time of 0.270 s before releasing it.During the acceleration, the discusmoves in a circular arc of radius0.810 m.
Find the magnitude of the totalacceleration of the discus just before the discus is released.

8.5 Centripetal Acceleration and Tangential Acceleration
( )( )2
22
sm182
srad0.15m 810.0
=
== !rac
( )
2sm0.45s 0.270
srad0.15m 810.0
=
!"
#$%
&===t
ù-ùrra o
T '
( ) ( ) 22222 sm187sm0.45sm182 =+=+= cT aaa
ω - ωo
ac2 + aT
2
φ = tan-1 aT/ac = tan-1 (45.0)/(182) = 13.9o

Chapter 9
Rotational Dynamics

9.1 The Action of Forces and Torques on Rigid Objects
In pure translational motion, all points on anobject travel on parallel paths.
The most general motion is a combination oftranslation and rotation.

9.1 The Action of Forces and Torques on Rigid Objects
According to Newton’s second law, a net force causes anobject to have an acceleration.
What causes an object to have an angular acceleration?
TORQUE
Torque tells you how effective a given force is at rotating something about some axis.

9.1 The Action of Forces and Torques on Rigid Objects
The amount of torque depends on where and in what direction the force is applied, as well as the location of the axis of rotation.

9.1 The Action of Forces and Torques on Rigid Objects
DEFINITION OF TORQUE
Magnitude of Torque = (Magnitude of the force) x (Lever arm)
lF=!Direction: The torque is positive when the force tends to produce a counterclockwise rotation about the axis.
SI Unit of Torque: newton x meter (N·m)

9.1 The Action of Forces and Torques on Rigid Objects
The lever arm, l, for some force acting about some rotation axis is defined as the distance between the rotation axis and a perpendicular to the force.

9.1 The Action of Forces and Torques on Rigid Objects
Example 2 The Achilles Tendon
The tendon exerts a force of magnitude720 N with a geometry as shown inthe figure.
Determine the torque (magnitudeand direction) of this force about the ankle joint.

9.1 The Action of Forces and Torques on Rigid Objects
720 N
lF=!
m106.355cos 2!"
=lo
( )( )mN 15
55cosm106.3N 720 2
!=
"= # o$
First, calculate the magnitude of τ
Since the force rotates the foot about the ankle joint in a clockwise direction --> τ negative
τ = - 15 N m , if the direction is included

9.2 Rigid Objects in Equilibrium
If a rigid body is in equilibrium, neither its linear motion nor its rotational motion changes.
0=! xF ! = 0yF ! = 0"
0== yx aa 0=!

9.2 Rigid Objects in Equilibrium
EQUILIBRIUM OF A RIGID BODY
A rigid body is in equilibrium if it has zero translationalacceleration and zero angular acceleration. In equilibrium,the sum of the externally applied forces is zero, and thesum of the externally applied torques is zero.
! = 0"! = 0yF0=! xF

9.2 Rigid Objects in Equilibrium
Reasoning Strategy1. Select the object to which the equations for equilibrium are to be applied.
2. Draw a free-body diagram that shows all of the external forces acting on theobject.
3. Choose a convenient set of x, y axes and resolve all forces into componentsthat lie along these axes.
4. Apply the equations that specify the balance of forces at equilibrium. (Set the net force in the x and y directions equal to zero.)
5. Select a convenient axis of rotation. Set the sum of the torques about thisaxis equal to zero.
6. Solve the equations for the desired unknown quantities.

9.2 Rigid Objects in Equilibrium
Example 3 A Diving Board
A woman whose weight is 530 N is poised at the right end of a diving boardwith length 3.90 m. The board hasnegligible weight and is supported bya fulcrum 1.40 m away from the leftend.
Find the forces that the bolt and the fulcrum exert on the board.

9.2 Rigid Objects in Equilibrium
022 =!=" WWF ll#
( )( ) N 1480m 1.40
m 90.3N 5302 ==F
22
l
lWWF =

9.2 Rigid Objects in Equilibrium
021 =!+!=" WFFFy
0N 530N 14801 =!+! F
N 9501 =F

9.2 Rigid Objects in Equilibrium
Example 5 Bodybuilding
The arm is horizontal and weighs 31.0 N. The deltoid muscle can supply1840 N of force. What is the weight of the heaviest dumbell he can hold?

9.2 Rigid Objects in Equilibrium
0=+!!=" Mddaa MWW lll#
( ) ol 0.13sinm 150.0=M

9.2 Rigid Objects in Equilibrium
( )( ) ( )( ) N 1.86m 620.0
0.13sinm 150.0N 1840m 280.0N 0.31=
+!=
+!=
o
l
ll
d
Maad
MWW





![Index [ifers.org]ifers.org/uploads/3/4/9/2/34924997/music_index.pdf255 Index 2D-FMC See 2-dimensional Fourier Magnitude Coefficients, 179 2-dimensional Fourier Magnitude Coefficients,](https://static.fdocument.org/doc/165x107/61174f297a49a9080460fd0e/index-ifersorgifersorguploads349234924997musicindexpdf-255-index-2d-fmc.jpg)