Chapter 5 System Response and Simulation: Problems = us(t ) J b ω Chapter 5 System Response and...
5
J b T = u s (t ) ω Chapter 5 System Response and Simulation: Problems Figure 5.1: A rotor supported by bearings, driven by torque. 1. Figure 5.1 depicts a rotor of inertia J supported by bearings with damping b, and driven by a torque T . Obtain the shaft angular velocity ω = ω(t) due to a unit step input in torque T =1 Nm u s (t). Assume zero initial conditions and parameter values J =2 Nms 2 and b =4 N m s. Also estimate the system’s time constant. 2. During starting of an automobile, a switch engages the 12 volt battery to the DC starter motor, which cranks the engine. The starter motor’s electrical resistance R = 0.01 ohm, and the motor’s current to torque constant K = 1NmA −1 . The engine presents friction (damping b = 5 N m s) and inertia (J = 5Nms 2 ) to the starter motor. Obtain the system equation(s), and determine the response for a typical start. 3. Determine the time varying fluid volume v = v(t) in an initially empty tank of uniform cross section area A = 200 m 2 , due to a step increase in pipe pressure P (t) = 10u s (t) kPa at the mouth of a short pipe leading into the bottom of the tank. The pipe’s resistance R p = 100 Pa s m −3 . The fluid is water, with density ρ = 1000 kg m −3 . 1
Transcript of Chapter 5 System Response and Simulation: Problems = us(t ) J b ω Chapter 5 System Response and...

J b T = us(t )
ω
Chapter 5
System Response andSimulation: Problems
Figure 5.1: A rotor supported by bearings, driven by torque.
1. Figure 5.1 depicts a rotor of inertia J supported by bearings with damping b, and
driven by a torque T . Obtain the shaft angular velocity ω = ω(t) due to a unit step
input in torque T = 1 N m us(t). Assume zero initial conditions and parameter
values J = 2 N m s2 and b = 4 N m s. Also estimate the system’s time constant.
2. During starting of an automobile, a switch engages the 12 volt battery to the DC
starter motor, which cranks the engine. The starter motor’s electrical resistance R =0.01 ohm, and the motor’s current to torque constant K = 1 N m A−1. The engine
presents friction (damping b = 5 N m s) and inertia (J = 5 N m s2) to the starter
motor. Obtain the system equation(s), and determine the response for a typical start.
3. Determine the time varying fluid volume v = v(t) in an initially empty tank of
uniform cross section area A = 200 m2, due to a step increase in pipe pressure
P (t) = 10us(t) kPa at the mouth of a short pipe leading into the bottom of the
tank. The pipe’s resistance Rp = 100 Pa s m−3. The fluid is water, with density
ρ = 1000 kg m−3.
1

2CHAPTER 5. SYSTEM RESPONSE AND SIMULATION: PROBLEMS
4. Figure ?? of problem ?? of chapter ?? depicts a seismograph for measuring ground
motions x(t). From the state equations obtained from that problem, determine the
response z(t) of the seismograph’s mass M for step and sinsusoidal ground motions
x(t).
5. Given the ordinary differential equation
x + 3x + 9x = 4us(t), t > 0 (5.1)
with initial conditions x(0) = 49 and x(0) = 0. Determine the damping ratio
and damped natural frequency. Determine the system eigenvalue(s). Determine the
complete solution to the initial value problem.
6. Given the system of state equations
x = −3x + 2y + 2e−tus(t)
y = −x − y − e−tus(t)
valid for t > 0 with initial conditions x(0) = 0 and y(0) = 0. Determine the
system eigenvalue(s). Determine the general homogeneous solution and express it
in terms of real functions. Determine a particular solution. Determine the complete
solution.
7. Given the system of state equations:
x1 + 6x1 = 0
x2 + 2x1 + 7x2 − 2x3 = 0
x3 + x1 + 2x2 + x3 = 2e−t
(5.2)
Determine all eigenvalues, at least one eigenvector, and a particular solution.
8. Given the system of equations
[xp
]=
[2h − 1 −32h/3 −1
] [xp
]+
[10
]us(t), t > 0.
with initial conditions x(0) = 1 and p(0) = 0. For what value(s) of h ≤ 0will the transient response oscillate? HINT: Inspect the characteristic equation. For
h = 1, give expressions for the natural frequency, the damping ratio, and the
damped natural frequency.

y
θ
w
0Se 1
I:mt ire1
TF:w/2
I:Mcar
0Se 1
I:mtire
TF:w/2
C:kspring
1 I:Jcar
1
R:bshock C:kspring1
R:bshock
3
9. Given
[x1
x2
]=
[−3 21 −2
] [x1
x2
]+
[−22
]us(t), t > 0.
with initial conditions [x1(0), x2(0)]T = [0, 1]T . Determine the system eigen-
value(s), and if it applies, determine the damping ratio and damped natural frequency.
Finally, determine the complete solution.
10. Determine all eigenvalues and one eigenvector associated with the system of state
equations in matrix form
x1
x2
x3
=
−6 0 0−2 −5 0−1 1 −4
x1
x2
x3
+
1061
e−12t cos t.
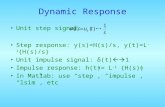
Figure 5.2: Front end suspension system, for problem 11.
11. Shown in figure 5.2 is the front end suspension system of an automobile. The car
body can translate vertically along y and rotate about θ, rendering two degrees of
freedom (DOF) for motions of the car body. From the bond graph in figure 5.2,
extract the state equations. From the homogeneous solution, determine the four
modes of response.
12. Augment problem 11 to include the tires. Replace the effort sources in the bond
graph of figure 5.2 with groups of elements that model the stiffness and damping
of the tires, excited by flow sources that model the vertical motions imposed on the
tires by bumps on the road. Then extract the system of state equations, and perform
a complete modal analysis.

vf
f lat
Mk
Mg
µs
v
µd
vd
µ(v)
4CHAPTER 5. SYSTEM RESPONSE AND SIMULATION: PROBLEMS
13. A system x− 2bx + (b2 − 1)x = us(t) has zero initial conditions. Determine
the range of values of parameter b for which the system is stable.
14. Determine all eigenvalues associated with the system of state equations
x1
x2
x3
=
h −h 10 0 1−3 −2 −1
x1
x2
x3
+
2−80.6
e−12tus(t), t > 0.
Here h is a parameter to be set by the designer. For what values of parameter his the system stable? Will the system transient response oscillate? If so, at what
frequency will it oscillate?
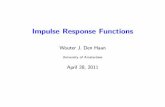
Figure 5.3: Slider with friction, for problem 15.
15. In figure 5.3, a flat moving at speed vf slides against a block of mass M , attached
to a wall by spring k. The block’s weight pressing against the flat induces friction
which opposes sliding. Formulate a bond graph for the system of figure 5.3 and
extract the state equations. For the friction constitutive law, use coulomb friction—
friction force proportional to normal force via coefficient of friction µ. Approximate
by the dashed line in figure 5.3 the local dependence µ = µ(v) on sliding velocity
v shown by the solid curve. Show that if friction force diminishes with sliding
velocity, i.e., if the local slope of friction force versus sliding velocityis negative, unstable “stick-slip” vibrations can result. Stick-slip causes the nasty
“squealing” sounds of brakes, or fingernails running against blackboards. HINT:
Find the equation of the dashed straight line, and determine the eigenvalues.
16. In problem 15, the block in figure 5.3 can also vibrate normal to the direction
of sliding. These motions perturb the normal force, and thus the friction force.
Incorporate these effects. Construct a second bond graph for normal motions of the
block, and include block weight Mg, mass inertia M , and contact compression
between block and flat. Similar to problem ??, view the block and flat as locally

-3 -2 -1 1 2 3
-80
-60
-40
-20
20
40
Magnitude MdB
Phase φ (degrees)
10 10 1010 1010ω
5
curved bodies with contact force N = Cδ3/2 nonlinearly dependent on contact
compression δ. Derived the coupled set of equations, and estimate the eigenvalues.
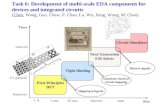
Figure 5.4: Bode chart for problem 17.
17. Estimate the forced response of a system (whose Bode plot is given in figure 5.4) to
a sinusoidal excitation of frequency 10,000 radians/second and amplitude 100.