chapter 2.ppt
24
Dr. B Dayal Dr. B Dayal
-
Upload
arkew-bogale -
Category
Documents
-
view
217 -
download
0
Transcript of chapter 2.ppt

Dr. B DayalDr. B Dayal

Dr. B DayalDr. B Dayal

PERFORMANCE CHARACTERISTICS PERFORMANCE CHARACTERISTICS OF ENGINESOF ENGINES
gasolinegasoline dieseldiesel

ACCELERATION PERFORMANCE ENGINE POWER TRACTION LIMITS ON THE TYRE WHEELS.POWER LIMITED ACCELERATION.ENGINE.POWER = TORQUE X SPEED = 2πTNPower = rate of work done = force x dS / dt = force x V
Force = Fx = power / V
Fx = Max = power / V
ax = power / MV = power . g /(W . V)

POWER TRAIN IN AUTOMOBILE SYSTEM
ENGIENGINENE
CLUTCCLUTCHH
GEAR GEAR BOXBOX
PROPELLOR PROPELLOR SHAFTSHAFT
DIFFERDIFFERENTIALENTIAL
AXLE AXLE SHAFTSHAFT
AXLE AXLE SHAFTSHAFT
FINAL DRIVEFINAL DRIVEWHEELWHEEL
WHEEWHEELL

POWER TRAINTc = Te – Ie αe
Where, Tc = torque at the clutchTe = engine torque at a given speedIe = engine rotational inertiaαe = engine rotational acceleration
TD = (Tc – Itαt) . GWhere, TD = torque output to the propeller shaft
G = gear ratioIt = rotational inertia of the transmission
Ta = Fxr + Iw αw = (TD – Id αd)GFD
Where, Ta = torque on the axlesFx = tractive force at the groundr = radius on the wheelIw = rotational inertia of the wheels and axle shaftsαw = rotational acceleration of the wheels

POWER TRAINId = rotational inertia of the drive shafts
αd = rotational acceleration of the drive shaft
GFD = gear ratio of the final drive
α d = GFD . αW
And αe = G . Αd = G . Gfd . Αw
Fx = Te . Goverall / r – [(Ie + It)G2overall + IdG2
FD + Iw]ax / r2
Where, Goverall = combined ratio of transmission and final drive.Taking efficiency of transmission and final drive into consideration:
Fx = [Te . Goverall . ƞtf / r] – [(Ie + It)G2overall + IdG2
FD + Iw] ax / r2
Where, ƞtf = combined efficiency of transmission and final drive.• First term on the right side represents the steady state tractive
force available.• The second term represents the “loss” of tractive force due to
inertia of the engine and driveline components.

POWER TRAINKnowing the tractive force, it is now possible to predict the
acceleration performance of the vehicle.M . ax = W . Ax / g = Fx – Rx – DA – Rhx – W sin ƟWhere, Rx = rolling resistance forces
DA = aerodynamic forcesRhx = hitch (towing forces)
Since Fxincludes the tractive force and rotational terms. For rotational terms, taking lumped mass into consideration:
(M + Mr)ax = (W + Wr)ax / g = [Te . Goverall . ƞtf / r] - Rx – DA – Rhx – W sin Ɵ
Where, Mr = equivalent mass of rotating componentsM + Mr = “effective mass”
And (M + Mr) / M = “mass factor”• The mass factor will depend upon the operating gear. The
representative number is often taken as:Mass factor = 1 +0.04 + 0.0025 G2
overall

TRACTIVE EFFORT – SPEED CHARACTERISTICS FOR A MANUAL TRANSMISSIONTRACTIVE EFFORT – SPEED CHARACTERISTICS FOR A MANUAL TRANSMISSION
The constant engine power line is equal to the maximum power of the The constant engine power line is equal to the maximum power of the engine, which is upper limit of the tractive effort available, less any losses in engine, which is upper limit of the tractive effort available, less any losses in the drive line.the drive line.

TORQUE CONVERTORTORQUE CONVERTOR

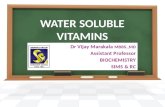
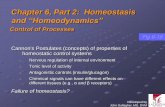
CHARACTERISTICS OF A CHARACTERISTICS OF A TYPICAL TORQUE CONVERTERTYPICAL TORQUE CONVERTER
At 0 output speed, At 0 output speed, output torque is more output torque is more than two times the than two times the engine torque, engine torque, providing for good providing for good take off.take off.As speed builds up As speed builds up the transmission the transmission input approaches the input approaches the engine speed and engine speed and torque ratio drops to torque ratio drops to 1.1.

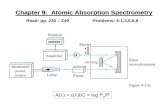
TRACTIVE EFFORT – SPEED CHARACTERISTICS FOR AN AUTOMATIC TRANSMISSION
In first gear the tractive In first gear the tractive effort rises significantly.effort rises significantly.Road load forces are Road load forces are shown arising from rolling shown arising from rolling resistance, aerodynamic resistance, aerodynamic drag and road grade.drag and road grade.The intersection between The intersection between the road load curve and the road load curve and tractive effort curves is the tractive effort curves is the maximum speed that can maximum speed that can be sustained in that gear.be sustained in that gear.

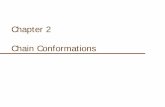
SELECTION OF GEAR RATIOS BASED ON GEOMETRIC PROGRESSION
The actual ratios selected The actual ratios selected for a transmission may be for a transmission may be tailored for performance in tailored for performance in specific modes – an optimal specific modes – an optimal first gear for starting, a first gear for starting, a second or third gear for second or third gear for passing, and a high gear for passing, and a high gear for fuel economy.fuel economy.The best gear ratios usually The best gear ratios usually fall close to a geometric fall close to a geometric progression, in which the progression, in which the ratios change by a constant ratios change by a constant percentage from gear to gear.percentage from gear to gear.

GEAR RATIOS ON A TYPICAL GEAR RATIOS ON A TYPICAL PASSENGER CARPASSENGER CAR

EXAMPLE PROBLEMSProb 1. we are given the following information about the engine and
drive train components for a passenger car:Engine inertia 0.8 in – lb - sec2
Torque available:
Transmission data:
Final drive: inertia = 1.2 in – lb – sec2; ratio = 2.92; efficiency = 0.99; wheel size = 12.59 inches
Calculate the effective inertia of the drive train components in first gear
Rpm 800 1200 1600 2000 2400 2800 3200 3600 4000 4400 4800 5200
torque 120 132 145 160 175 181 190 198 200 201 198 180
Gear 1 2 3 4 5
Inertia (in – lb – sec2) 1.3 0.9 0.7 0.5 0.3
ratio 4.28 2.79 1.83 1.36 1.00
efficiency 0.966 0.967 0.972 0.973 0.970

EXAMPLE PROBLEMS
Prob 2. calculate the maximum tractive effort and corresponding road speed in first gear and fifth gear of the car given in previous slide when inertial losses are neglected.

TRACTION LIMITED ACCELERATION
Presuming there is adequate power from the engine, the acceleration may be limited by the coefficient of friction between the tyre and road.
Fx = μWWhere, μ = coefficient of friction
W = weight of the vehicleThe weight on a drive wheel then depends on the static
plus the dynamic load due to acceleration, and on any traverse shift of load due to drive torque.

TRANSVERSE WEIGHT SHIFT DUE TO DRIVE TORQUE
Transverse weight shift occurs on all solid drive axles. The drive shaft into the differential imposes a torque Td on the
axle.A torque due to suspension roll A torque due to suspension roll stiffness, Tstiffness, Tss, is produced., is produced.Any difference between these Any difference between these two must be absorbed as a two must be absorbed as a difference in weight on the two difference in weight on the two wheels.wheels.If the axle is of non-locking If the axle is of non-locking type, then the torque delivered to type, then the torque delivered to both wheels will be limited by the both wheels will be limited by the traction limit on the most lightly traction limit on the most lightly loaded wheel.loaded wheel.

TRANSVERSE WEIGHT SHIFT DUE TO DRIVE TORQUE∑To = (Wr / 2 + Wy – Wr / 2 + Wy)t/2 + Ts – Td = 0
Or Wy = (Td – Ts) / t
In the above equation, Td can be related to the drive forces because
Td = Fx . R / GFD
Where, Fx = total drive force from the two rear wheels.r = tyre radius
GFD = final drive ratioRoll torque produced by suspension requires analysis of the
whole vehicle because the reaction of the drive torque on the chassis attempts to roll the chassis on both the front and rear suspensions.

DRIVE TORQUE REACTIONS ON THE CHASSIS
• The drive torque reaction at the engine / transmission is transferred to the frame and distributed between the front and rear suspensions.
• It is generally assumed that the roll torque produced by a suspension is proportional to roll angle of the chassis

TRANSVERSE WEIGHT SHIFT DUE TO DRIVE TORQUE
Then:
Tsf = KΦf . Φ
Tsr = KΦr . Φ
KΦ = KΦf + KΦr
Where, Tsf = roll torque on the front suspension
Tsr = roll torque on the rear suspension
KΦf = front suspension roll stiffness
KΦr = rear suspension roll stiffness
KΦ = total roll stiffnessΦ = roll angle
Φ = Td / KΦ = Td / (KΦf + KΦr)
Therefore, Tsr = KΦr . Td / (KΦf + KΦr)
Thus, Wy = [Fxr / GFDt] . [1 – KΦr / (KΦf + KΦr)]
Or Wy = [Fxr / GFDt] . [KΦf / KΦ]

TRANSVERSE WEIGHT SHIFT DUE TO DRIVE TORQUE
The net load on the rear axle during acceleration will be its static plus dynamic components.
For a rear axle:Wr = W . (b/L + axh/gL)
Or Wr = W . (b/L + Fxh/MgL)The weight on the right rear wheel Wrr = Wr / 2 – Wy
Or Wrr = Wb/2L + Fxh/2L – (FxrKΦf / Nft KΦ) Fx = 2μWrr = 2μ[Wb/2L + Fxh/2L – (Fxr KΦf/ Nft KΦ)
Traction limitsFxmax = (μWb/L) / [1 – μh/L + 2μrKΦf / Nft KΦ]
For a solid rear axle with a locking differential and in the case of an independent rear suspension:
Fxmax = (μWb/L) / [1 – μh/LFor the solid front drive axle with non-locking differential:
Fxmax = (μWc/L) / [1 + μh/L + 2μrKΦr / Nft KΦ]

TRANSVERSE WEIGHT SHIFT DUE TO DRIVE TORQUE
Traction limits (CONTD)For the solid front drive axle with
locking differential and in the case of independent front drive axle:
Fxmax = (μWc/L) / [1 + μh/L]

EXAMPLE PROBLEMSProb 1. find the traction limited acceleration for the rear drive
passenger car with and without a locking differential on a surface of moderate friction level. The following information is available:
Weight: front = 2100 lb; rear = 1850 lb; total weight = 3950 lbCG height = 21.0 in; wheel base = 108 in; coefficient of
friction = 0.62; tread = 59.0 in; final drive ratio = 2.90; tyre size = 13.0 in; roll stiffness = front = 1150 ft-lb/deg; rear = 280 ft – lb/deg
Prob 2. find the traction limited performance of a front wheel drive vehicle under the same road conditions as the problem above. The essential data are:
Weight: front = 1950 lb; rear = 1150 lb; CG height = 19.0 in; wheel base = 105 in; coefficient of friction = 0.62; tread = 60 in; final drive rastio = 3.70; tyre size = 12.59 in; roll stiffness: front = 950 ft – lb/deg; rear = 620 ft – lb/deg.