EAMCET ENGINEERING MODEL GRAND … file EAMCET ENGINEERING MODEL GRAND TEST ...
Upload
nguyenngocCategory
view
217download
3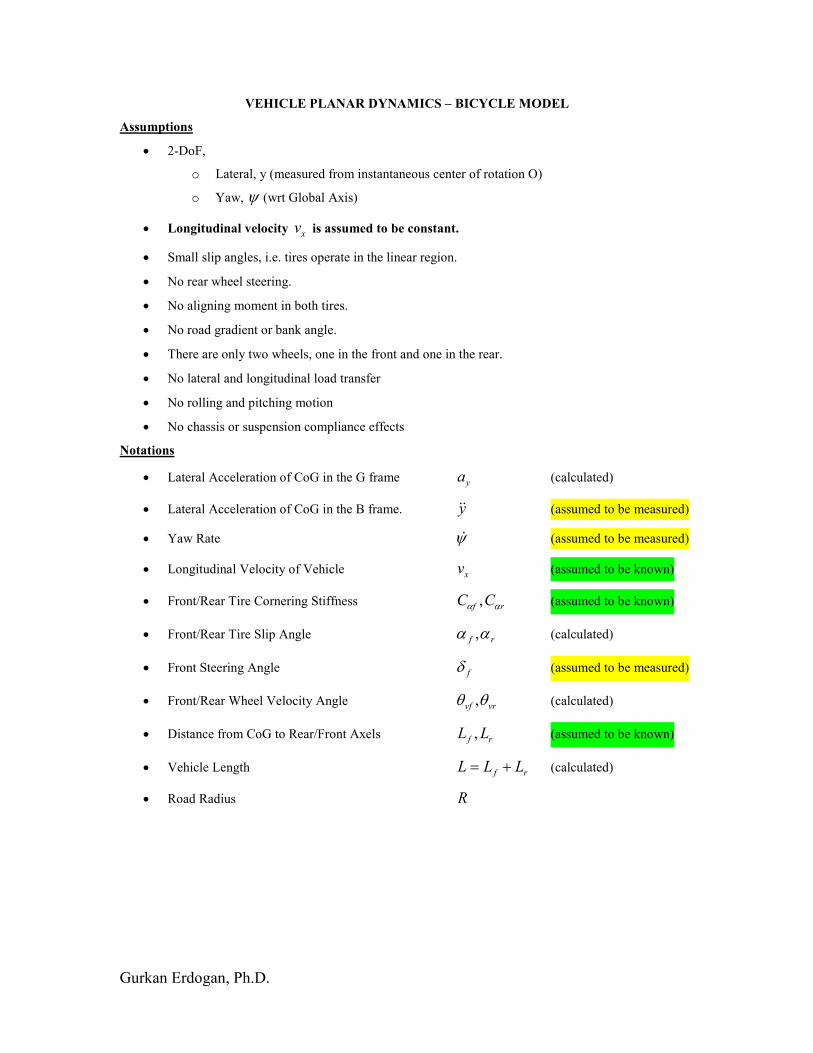
Gurkan Erdogan, Ph.D.
VEHICLE PLANAR DYNAMICS – BICYCLE MODEL
Assumptions
• 2-DoF,
o Lateral, y (measured from instantaneous center of rotation O)
o Yaw, ψ (wrt Global Axis)
• Longitudinal velocity xv is assumed to be constant.
• Small slip angles, i.e. tires operate in the linear region.
• No rear wheel steering.
• No aligning moment in both tires.
• No road gradient or bank angle.
• There are only two wheels, one in the front and one in the rear.
• No lateral and longitudinal load transfer
• No rolling and pitching motion
• No chassis or suspension compliance effects
Notations
• Lateral Acceleration of CoG in the G frame ya (calculated)
• Lateral Acceleration of CoG in the B frame. y&& (assumed to be measured)
• Yaw Rate ψ& (assumed to be measured)
• Longitudinal Velocity of Vehicle xv (assumed to be known)
• Front/Rear Tire Cornering Stiffness rf CC αα , (assumed to be known)
• Front/Rear Tire Slip Angle rf αα , (calculated)
• Front Steering Angle fδ (assumed to be measured)
• Front/Rear Wheel Velocity Angle vrvf θθ , (calculated)
• Distance from CoG to Rear/Front Axels rf LL , (assumed to be known)
• Vehicle Length rf LLL += (calculated)
• Road Radius R

Gurkan Erdogan, Ph.D.
System Model
• Lateral Force Equilibrium yryfy FFma +=
• Moment Equilibrium yrryffz FlFlI −=ψ&&
Lateral
Acceleration
in the G
frame
ψ&&&xy vya +=
Rear Tire Front Tire
Lateral
Forces in
the B frame rcryr FF δcos= fcfyf FF δcos=
Lateral
Forces in
the W frame rrcr CF αα= ffcf CF αα=
Slip Angle vrrr θδα −= vfff θδα −=
Velocity
Angle
−= −
x
rvr
v
Ly ψθ
&&1tan
+= −
x
f
vfv
Ly ψθ
&&1tan
Exact Lateral Force Balance
( ) ( )
( ) f
x
f
ffr
x
rrrx
fvfffrvrrr
fffrrr
fcfrcr
yfyry
v
LyC
v
LyCvym
CC
CC
FF
FFma
δψ
δδψ
δψ
δθδδθδ
δαδα
δδ
αα
αα
αα
costancostan
coscos
coscos
coscos
11
+−+
−−=+
−+−=
+=
+=
+=
−−&&&&
&&&
Gurkan Erdogan, Ph.D.
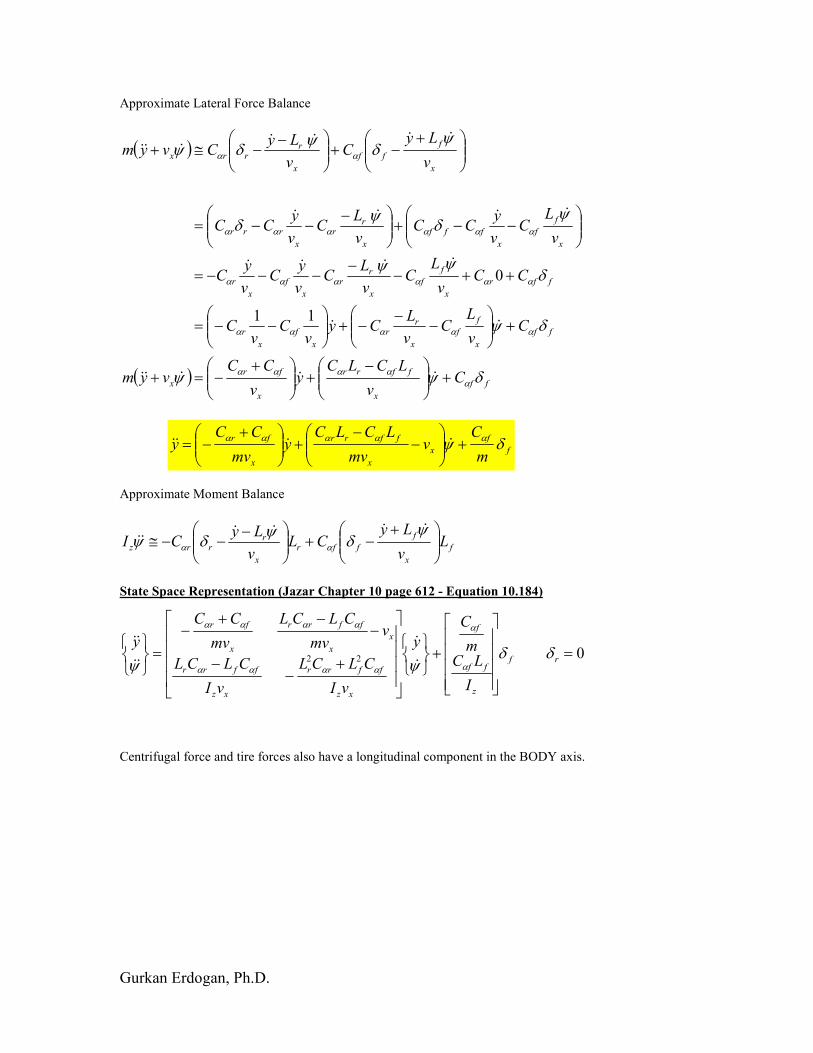
Approximate Lateral Force Balance
( )
( ) ff
x
ffrr
x
fr
x
ff
x
f
f
x
rr
x
f
x
r
ffr
x
f
f
x
rr
x
f
x
r
x
f
f
x
fff
x
rr
x
rrr
x
f
ff
x
rrrx
Cv
LCLCy
v
CCvym
Cv
LC
v
LCy
vC
vC
CCv
LC
v
LC
v
yC
v
yC
v
LC
v
yCC
v
LC
v
yCC
v
LyC
v
LyCvym
δψψ
δψ
δψψ
ψδ
ψδ
ψδ
ψδψ
ααααα
ααααα
αααααα
αααααα
αα
+
−+
+−=+
+
−
−−+
−−=
++−−
−−−=
−−+
−−−=
+−+
−−≅+
&&&&&
&&
&&&&
&&&&
&&&&&&&
11
0
f
f
x
x
ffrr
x
fr
m
Cv
mv
LCLCy
mv
CCy δψ ααααα +
−
−+
+−= &&&&
Approximate Moment Balance
f
x
f
ffr
x
rrrz L
v
LyCL
v
LyCI
+−+
−−−≅
ψδ
ψδψ αα
&&&&&&
State Space Representation (Jazar Chapter 10 page 612 - Equation 10.184)
022 =
+
+−
−
−−+
−
=
rf
z
ff
f
xz
ffrr
xz
ffrr
x
x
ffrr
x
fr
I
LCm
C
y
vI
CLCL
vI
CLCL
vmv
CLCL
mv
CC
yδδ
ψψ α
α
αααα
αααα
&
&
&&
&&
Centrifugal force and tire forces also have a longitudinal component in the BODY axis.
Gurkan Erdogan, Ph.D.
x
y
x
yxy
x
yxxy
x
y
dt
d
&
&&
&
&&&&
&
&&&&&&
&
&&
=
−=
−=
=
2
2
0
β
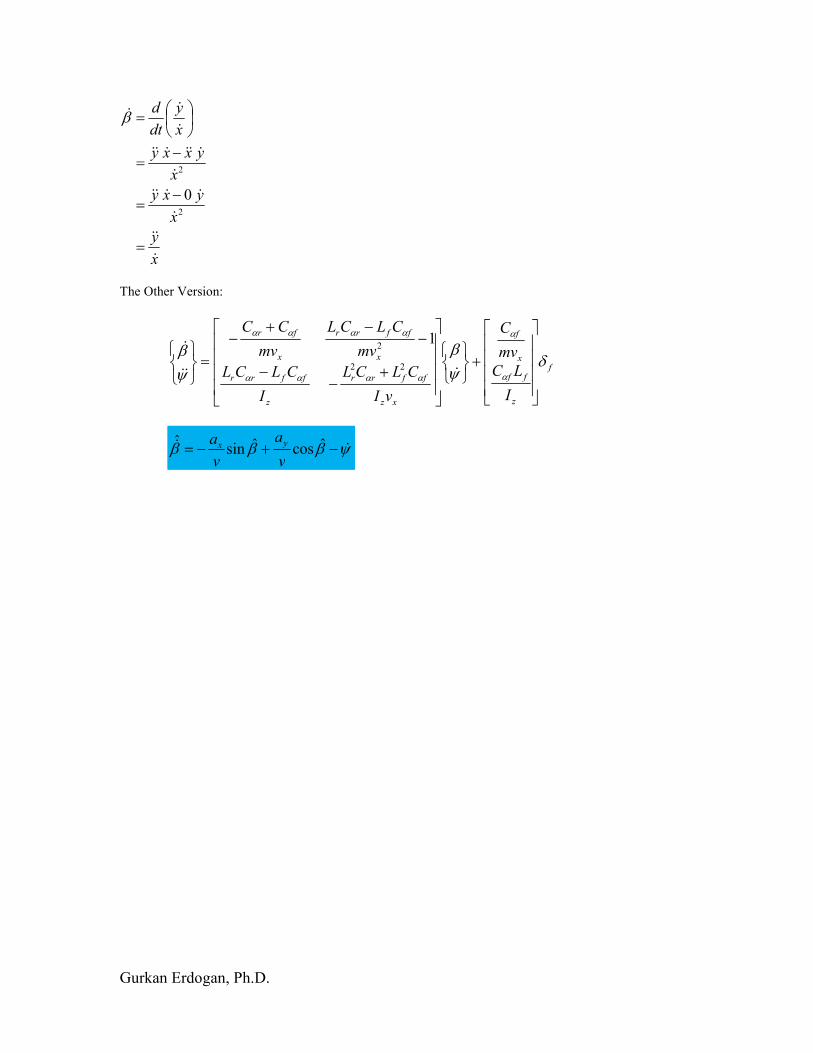
The Other Version:
f
z
ff
x
f
xz
ffrr
z
ffrr
x
ffrr
x
fr
I
LC
mv
C
vI
CLCL
I
CLCL
mv
CLCL
mv
CC
δψβ
ψβ
α
α
αααα
αααα
+
+−
−
−−+
−
=
&&&
&
22
21
ψβββ && −+−= ˆcosˆsinˆ
v
a
v
a yx

Gurkan Erdogan, Ph.D.
Steady State Steering Angle
rffssR
Lααδδ −+≅= GEOMETRY
• yx
yryf maR
vmFF ==+
2
CONSTANT Centripetal/Lateral Acc.
• 0==− ψ&&zyrryff IFLFL ZERO Angular Acc.
• yr
yf aL
LmF = y
f
yr aL
LmF = CONSTANT
• L
ma
C
L
C
F y
f
r
f
yf
f
αα
α == L
ma
C
L
C
F y
r
f
r
yr
r
αα
α == CONSTANT
yv
y
f
f
r
rss
aKR
L
L
ma
C
L
C
L
R
L
+=
−+=
αα
δ
• Under-steer gradient L
m
C
L
C
LK
f
f
r
rv
−=
αα
o Under Steer rf
f
f
r
rv
C
L
C
LK αα
αα
>>> 0
o Neutral Steer rf
r
r
f
f
vC
L
C
LK αα
αα
=== 0
o Over Steer rf
f
f
r
rv
C
L
C
LK αα
αα
<<< 0

Gurkan Erdogan, Ph.D.
Vehicle Side Slip Angle Estimation
2
ˆ
x
yxxy
x
y
dt
d
&
&&&&&&
&
&&
−=
=β
This looks okay, but we would like to use sensor measurements.
( )
( )
( )
( )
ψββ
ψβψ
βψ
ψβψ
ββψ
β
ψβψββψβ
ψβψβψββ
ψββψββ
ψψββ
ββ
β
&
&&&&&&&&&
&&&&&&&&&
&&&&
&&&
&&&&&&&
&&&&&&
&&&&&&
&&&&
&&&
&&&
&&&&&&
&
&&&&&&&
&
&&&&&&&
−+−=
−+
+−
−=
−+++−=
−+++−=
−+++−=
−+++−=
−++−=
−=
−=
−=
−≅
−=
cossin
cossin
coscossinsin
coscossinsin
cossincossin
cossincossin
cossin
sincos1
1
1
ˆ
22
22
22
2
22
2
2
v
a
v
a
v
xy
v
yx
v
x
v
y
v
y
v
x
v
y
v
x
v
y
v
x
v
y
v
x
v
y
v
x
xyv
v
yx
v
xy
v
yxxyv
x
yxxy
v
x
x
yxxy
yx
Now we can use yaw rate and acceleration sensors to estimate the yaw rate as below.
ψβββ && −+−= ˆcosˆsinˆ
v
a
v
a yx
Maximum Vehicle Side Slip Angle
It is a saturating function of the characteristic velocity.
( ) ( )
2max
12
2
213
3
21max 32
kvv
kv
vkk
v
vkkvv
chx
ch
x
ch
xchx
=⇒>
+−−−=⇒<
β
β

Gurkan Erdogan, Ph.D.
Yaw Rate Estimation
This is actually the steady state response, i.e. the gain, of the transfer function between
the steering input and the yaw rate output.
+
=
2
2
1ch
x
f
x
v
vL
vδ
ψ&
Derivation of the above equation and the Characteristic Velocity
ψψ
δ
&&xv
x
xxv
x
x
xv
yvss
vKv
L
R
vvK
R
v
v
L
R
vK
R
L
aKR
L
+=
+=
+=
+=
2
+
=
+
=
+=
+=
2
22
11ch
x
ssx
xv
x
ss
xvx
xx
ss
xv
x
ss
v
vL
v
L
vK
v
L
vKL
v
v
L
v
L
vKv
L
δδψ
δψ
δψ
&
&
&
v
chK
Lv =2
Maximum Yaw Rate
( )( )
( )βψ
βψ
ββψ
ββ
ˆsin1
sin10
sincos
sincos
max
max
max
max
xmeasrad
x
xxmeasrad
xx
xymeasrad
aav
ava
avy
aaa
−=
++≅
++=
+=
&
&
&&&
We assume that
o CoG draws a perfect circle during a maneuver.
o The radial acceleration is in the direction of the radial force acting on the CoG.
o The radial acceleration is measured as the car travels around a circular trajectory.
o The longitudinal acceleration of the car measured along the longitudinal axis of
the vehicle also contributes to the radial acceleration of the CoG.
o All the acceleration is spent for the yaw motion, no lateral translation exist which
also means that the CoG stays on the circular trajectory.
o The max radial acceleration corresponds to a maximum yaw rate.
Note that radial and lateral accelerometers do not point at the same direction.
Gurkan Erdogan, Ph.D.
3 tane yerde yaw rate hesapladik
1.Bicycle model steady state
2.Max yawrate Steering Pad deneylerinden
1 ile 2 yi karistirip gaini bulduk sonra bicycle modelin steering input/yaw rate output
(gaini 1 olan) transfer fonksiyonundan gecirdik
(bir adet daha saturation function var en son islem olarak)
3.4W modelden gelen gercege daha yakin yaw rate var birde
Gurkan Erdogan, Ph.D.
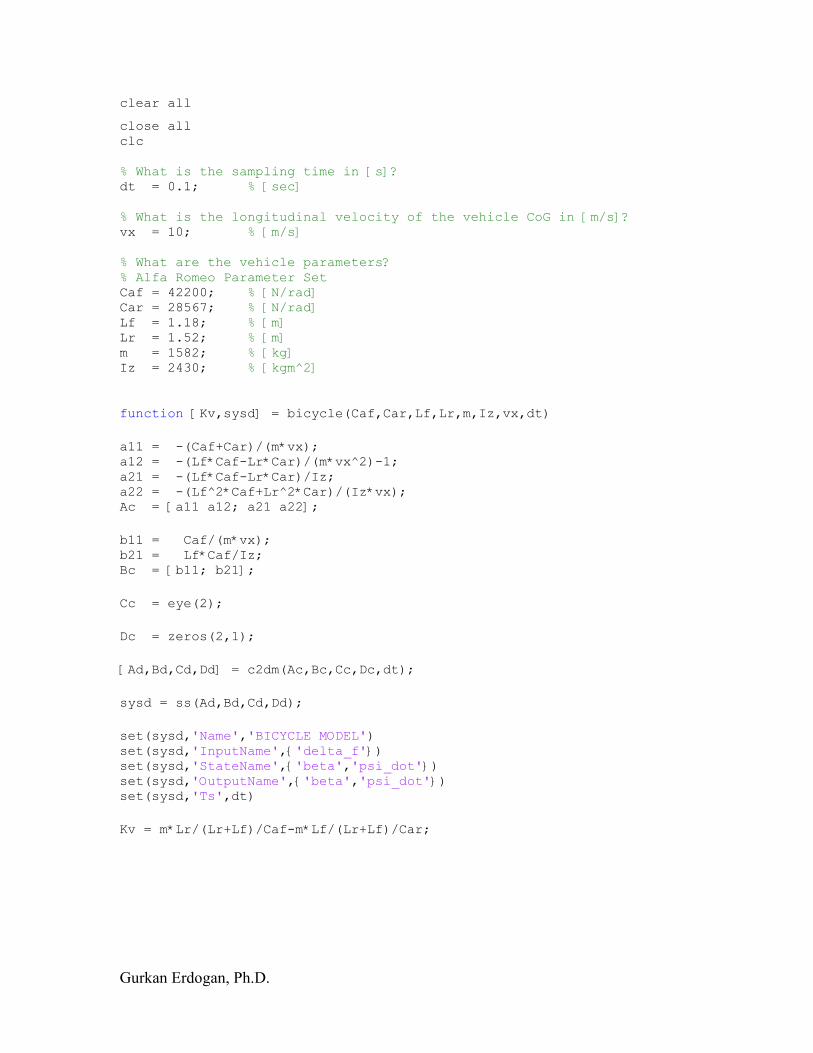
clear all
close all clc % What is the sampling time in [s]? dt = 0.1; % [sec] % What is the longitudinal velocity of the vehicle CoG in [m/s]? vx = 10; % [m/s] % What are the vehicle parameters? % Alfa Romeo Parameter Set Caf = 42200; % [N/rad] Car = 28567; % [N/rad] Lf = 1.18; % [m] Lr = 1.52; % [m] m = 1582; % [kg] Iz = 2430; % [kgm^2]
function [Kv,sysd] = bicycle(Caf,Car,Lf,Lr,m,Iz,vx,dt) a11 = -(Caf+Car)/(m*vx); a12 = -(Lf*Caf-Lr*Car)/(m*vx^2)-1; a21 = -(Lf*Caf-Lr*Car)/Iz; a22 = -(Lf^2*Caf+Lr^2*Car)/(Iz*vx); Ac = [a11 a12; a21 a22]; b11 = Caf/(m*vx); b21 = Lf*Caf/Iz; Bc = [b11; b21]; Cc = eye(2); Dc = zeros(2,1); [Ad,Bd,Cd,Dd] = c2dm(Ac,Bc,Cc,Dc,dt); sysd = ss(Ad,Bd,Cd,Dd); set(sysd,'Name','BICYCLE MODEL') set(sysd,'InputName',{'delta_f'}) set(sysd,'StateName',{'beta','psi_dot'}) set(sysd,'OutputName',{'beta','psi_dot'}) set(sysd,'Ts',dt) Kv = m*Lr/(Lr+Lf)/Caf-m*Lf/(Lr+Lf)/Car;