Autocorrelation function and the Wiener-Khinchin theorem · PDF fileI. BASIC CONCEPTS AND...
18
I. BASIC CONCEPTS AND DEFINITIONS Autocorrelation function and the Wiener-Khinchin theorem Consider a time series x(t) (signal). Assuming that this signal is known over an infinitely long interval [-T,T ], with T →∞, we can build the following function G(τ ) = lim T →∞ 1 T Z T 0 dtx(t)x(t + τ ), (1) known as the autocorrelation function of the signal x(t) (ACF). ACF is an even function Proof: G(-τ )= lim T →∞ 1 T Z T 0 dtx(t)x(t - τ )= n t - τ = y| T -τ -τ , dt = dy o (2) = lim T →∞ 1 T Z T -τ -τ dyx(τ + y)x(y) = lim T →∞ 1 T " Z 0 -τ (...)+ Z T 0 (...) - Z T T -τ (...) # = G(τ ) The last equality holds in the limit T →∞. The wiener-Khinchin theorem This theorem plays a central role in the stochastic series analysis, since it relates the Fourier transform of x(t) to the ACF. Introduce a new function S (ω) according to S (ω)= lim T →∞ 1 2πT | ˆ x(ω) | 2 , (3) where the forward Fourier transform of x(t) is given by ˆ x(ω)= Z T 0 dte -iωt x(t). (4) Note that if for real signal x(t), the Fourier transform obeys the following symmetry ˆ x(-ω)=ˆ ω * (5) The function S (ω) is called the power spectral density of x(t) (psd). The following lines relate S (ω) to G(τ ) (see Fig.1 for details) S (ω)= lim T →∞ 1 2πT Z T 0 dte -iωt x(t) Z T 0 dt 0 e iωt 0 x * (t 0 ) = {(t, t 0 ) → (t 0 ,τ = t - t 0 )} (6) 1
Transcript of Autocorrelation function and the Wiener-Khinchin theorem · PDF fileI. BASIC CONCEPTS AND...

I. BASIC CONCEPTS AND DEFINITIONS
Autocorrelation function and the Wiener-Khinchin theorem
Consider a time series x(t) (signal). Assuming that this signal is known over an infinitely
long interval [−T, T ], with T → ∞, we can build the following function
G(τ) = limT→∞
1
T
∫ T
0dtx(t)x(t+ τ), (1)
known as the autocorrelation function of the signal x(t) (ACF).
ACF is an even function
Proof:
G(−τ) = limT→∞
1
T
∫ T
0dtx(t)x(t− τ) =
t− τ = y|T−τ
−τ , dt = dy
(2)
= limT→∞
1
T
∫ T−τ
−τdyx(τ + y)x(y) = lim
T→∞
1
T
[∫ 0
−τ(. . .) +
∫ T
0(. . .)−
∫ T
T−τ(. . .)
]= G(τ)
The last equality holds in the limit T → ∞.
The wiener-Khinchin theorem
This theorem plays a central role in the stochastic series analysis, since it relates the
Fourier transform of x(t) to the ACF.
Introduce a new function S(ω) according to
S(ω) = limT→∞
1
2πT| x(ω) |2, (3)
where the forward Fourier transform of x(t) is given by
x(ω) =∫ T
0dte−iωtx(t). (4)
Note that if for real signal x(t), the Fourier transform obeys the following symmetry
x(−ω) = ω∗ (5)
The function S(ω) is called the power spectral density of x(t) (psd).
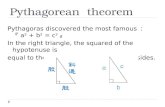
The following lines relate S(ω) to G(τ) (see Fig.1 for details)
S(ω) = limT→∞
1
2πT
∫ T
0dte−iωtx(t)
∫ T
0dt′eiωt
′x∗(t′)
= (t, t′) → (t′, τ = t− t′) (6)
1

0
0
tτ
T
−T
T
T
T
t’
t’
FIG. 1: Transformation of the integration domain under the change of variables
(t, t′) → (t′, τ = t− t′).
= limT→∞
1
2πT
[∫ T
0dτe−iωτ
∫ T−τ
0dt′x(t′)x∗(t′ + τ) +
∫ 0
−Tdτe−iωτ
∫ T
−τdt′x(t′)x∗(t′ + τ)
]
=1
2πT
[∫ 0
−Tdτe−iωτ (TG(τ) +O(1/T )) +
∫ T
0dτe−iωτ (TG(τ) +O(1/T ))
]
=1
2πlimT→∞
∫ T
−Tdτe−iωτG(τ).
Because the ACF is an even function, we can write
S(ω) =1
2π
∫ ∞
−∞G(τ)e±iωτdτ =
1
2π
∫ ∞
−∞G(τ) cosωτdτ =
1
π
∫ ∞
0G(τ) cosωτdτ (7)
Consequently, S(−ω) = S(ω) and using the following representation of the delta-function
δ(x) =1
2π
∫ ∞
−∞e±iωxdω, (8)
we conclude that
G(τ) =∫ ∞
−∞eiωτS(ω)dω. (9)
What happens in case of a deterministic signal?
Let x(t) = A cosΩt, then the Fourier transform
x(ω) =∫ T
0dte−iωtA cosΩt = A
T
2δΩ,ω +O(1). (10)
2

0 2 4ω
0
0.5
1
1.5
S(ω
) deterministicstochastic
-10 -5 0 5 10τ
-1.5
-1
-0.5
0
0.5
1
1.5
G(τ
)(a) (b)
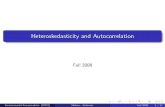
FIG. 2: (a) ACF G(τ) of a deterministic (dashed line) and a stochastic (solid line) signals. (b)
The corresponding psd S(ω).
The psd
S(ω) = limT→∞
1
2πTx(ω)x∗(ω) = lim
T→∞
A2T
8πδ2Ω,ω +O(1) = O(T )δΩ,ω. (11)
Consequently, S(ω = Ω) diverges as T → ∞.
The ACF is found as
G(τ) = limT→∞
A2
T
∫ T
0dt cosΩt cosΩ(t+ τ) (12)
= limT→∞
A2
T
∫ T
0dt(cos2Ωt cosΩτ − sinΩt cosΩt sinΩτ
)=
A2 cosΩτ
2+O(1/T )
Stochastic vs deterministic.
The ACF and the psd functions can be used to distinguish between stochastic and de-
terministic signals. Thus, the ACF of a deterministic signal is periodic, whereas the ACF
of a stochastic signal typically decays exponentially with τ (see Fig. 2(a)). The power spec-
tral function S(ω) of a deterministic signal consists of delta peaks, whereas the psd of a
stochastic signal typically shows a power law decay (Fig. 2(b)).
Stochastic processes
Loosely speaking, any stochastic process is a probabilistic time series. Consider a system,
whose dynamics is described by a certain time-dependent random variable x(t).
Introduce the joint probability to observe the values of x1, x2, . . . at the respective times
t1 > t2 > . . .
p(x1, t1; x2, t2; . . .) (13)
3

For any two moments of time t1 > t2 we can define the conditional probability
p(x1, t1|x2, t2) =p(x1, t1;x2, t2)
p(x2, t2)(14)
Note that
p(x1, t1) =∫Ωdx2 p(x1, t1;x2, t2), (15)
where we integrate over the entire probability space Ω.
Ensemble average
The integration over x, as in the above equation, is associated with the averaging over the
ensemble of different realizations of the stochastic process x(t). We will denote the ensemble
average by 〈. . .〉. Thus, the conditional time-dependent average of x is given by
〈x(t)|x0, t0〉 =∫
dx x p(x, t|x0, t0). (16)
Similarly, the conditional (non-stationary) ACF can be computed as
〈x(t)x(t′)|x0, t0〉 =∫dx dx′ xx′p(x, t; x′, t′|x0, t0) =
∫dx dx′ xx′p(x, t|x′, t′)p(x′, t′|x0, t0).(17)
The last equality only holds for Markovian processes (see below).
Markov processes:
For any t1 > t2 > t3 > t4, the probability at times t1 and t2 only conditionally depends
on the state at time t3, i.e.
p(x1, t1;x2, t2|x3, t3;x4, t4) = p(x1, t1;x2, t2|x3, t3). (18)
As a consequence of this property, we have
p(x1, t1; x2, t2|x3, t3) = p(x1, t1|x2, t2)p(x2, t2|x3, t3). (19)
Indeed
p(x1, t1|x2, t2)p(x2, t2|x3, t3) = p(x1, t1|x2, t2; x3, t3)p(x2, t2|x3, t3)
=p(x1, t1;x2, t2; x3, t3)
p(x2, t2;x3, t3)
p(x2, t2;x3, t3)
p(x3, t3)
= p(x1, t1; x2, t2|x3, t3). (20)
This proves the earlier result for non-stationary ACF Eq. (17).
4

The Chapman-Kolmogorov equation
From Eq. (19), one easily obtains
p(x1, t1|x3, t3) =∫Ωdx2
p(x1, t1; x2, t2;x3, t3)
p(x3, t3)=∫Ωdx2 p(x1, t1|x2, t2)p(x2, t2|x3, t3). (21)
the relation between the transitional probabilities (1|3) and (1|2), (2|3) is known as the
Chapman-Kolmogorov equation.
Stationary processes
Process x(t) is called stationary if for any ε, x(t + ε) has the same statistics as x(t).
Important properties of a stationary process:
〈x(t)〉 = const
〈x(t)x(t′)〉 = f(t− t′). (22)
Stationary ACF can be obtained from Eq. (17) by assuming that the initial moment of
time t0 is in the remote infinity
G(τ) = limt0→−∞
〈x(t)x(t′)|x0, t0〉 (23)
= limt0→−∞
∫xx′dx dx′ p(x, t;x′, t′|x0, t0) = lim
t0→−∞
∫xx′dx dx′ p(x, t|x′, t′)p(x′, t′|x0, t0)
=∫xx′dx dx′ p(x, t|x′, t′)ps(x
′) (24)
Example: The random telegraph process.
Ergodic processes
For an ergodic process, the averaging over time is equivalent to the averaging over the
ensemble. Note that ergodicity is stronger than stationarity. Example:
x(t) = A, A is uniformly distributed in [0; 1] (25)
Then, any realization is a straight line x(t) = Ai, but Ai are different for different realizations,
implying that 〈x(t)〉 = 0.5, whereas the average over time for every single realization is given
by∫dt x(t) = Ai.
Computation of Power spectral density
For stationary processes, the function S(ω) can be computed by taking the ensemble
average of the square of the Fourier transform of x(t). Thus we have
〈x(ω)x∗(ω′)〉 =∫
dt dt′e−iωteiω′t′〈x(t)x(t′)〉, (26)
5

where the integrals are taken in the limit of infinitely large intervals T → ∞. Because for a
stationary process
〈x(t)x(t′)〉 = G(t− t′), (27)
consequently
〈x(ω)x∗(ω′)〉 =∫dt dt′e−iωteiω
′t′G(t− t′) = (t, t′) → (t′, τ = t− t′) (28)
=∫dt′ei(ω
′−ω)t′∫dτe−iω′τG(τ)
= 2π∫
dt′ei(ω′−ω)t′S(ω′) = (2π)2S(ω′)δ(ω − ω′).
White noise and stochastic differential equations
The above result allows us to compute S(ω) for systems, described by linear stochastic
differential equations. Any such equation can be written in the form
x = f(x) +Dξ(t), (29)
where x is a vector variable, which characterizes the state of a system, f(x) is a linear
function, D is the noise strength (intensity), and, ξ(t) is the so called white noise. It can be
introduced as a completely uncorrelated time series with the ACF given
〈ξ(t)ξ(t′)〉 = δ(t− t′). (30)
Now it is easy to compute S(ω) for x(t) in Eq. (29). To this end, one needs to take the
Fourier transform of both sides in Eq. (29) and use Eq. (28).
Examples
We will compute S(ω) for the following standard processes:
(1): The one-dimensional Wiener process is described by the equation
x = ξ(t). (31)
Thus, we have in the Fourier space
iωx(ω) = ξ(ω), (32)
Consequently
〈x(ω)x∗(ω′)〉 = 〈ξ(ω)ξ∗(ω′)〉(iω)(−iω′)
(33)
6

But since by the definition of the white noise
〈ξ(ω)ξ∗(ω′)〉 = (2π)2(
1
2π
∫Gξ(τ)dτe
−iωτ)δ(ω − ω′) = (2π)δ(ω − ω′), (34)
we obtain
〈x(ω)x∗(ω′)〉 =2πδ(ω − ω′)
ω2= (2π)2S(ω)δ(ω − ω′)
S(ω) =(
1
2π
)1
ω2. (35)
If we formally try to compute the stationary ACF G(τ) using the Wiener-Khinchin theorem,
we obtain a contradictory result
G(τ) =∫ ∞
−∞
1
2πω2eiωτdω ∼ τ. (36)
The contradiction comes to surface if we now try to compute S(ω) using the G(τ). Clearly,
the function f(x) = x is not a square-integrable on the interval (−∞,∞), implying that
its Fourier transform does not exist. Physically, it means that the Wiener process is not a
stationary process, as we will see in more details later.
(2): Overdamped particle, the Ornstein-Uhlenbeck process The equation of
motion is
x = −αx+Dξ(t). (37)
Proceeding as before, we obtain
〈x(ω)x∗(ω′)〉 = D2(2π)δ(ω − ω′)
α2 + ω2, (38)
Consequently
S(ω) =D2
2π(α2 + ω2). (39)
This type of the power spectrum is known as the Lorentzian. It appears in many applications,
such as: chemical reactions, bistable systems, random telegraph process (details later). The
stationary ACF does exist and is given by
G(τ) =∫ ∞
−∞
D2
2π(α2 + ω2)eiωτdω =
D2
2αe−ατ . (40)
The last result shows that 〈x2〉 = G(0) = D2/2α.
7

0 1 2 3 4 5ω/ωc
10-3
10-2
10-1
100
101
102
103
S Vx (
ω/ω
c )
0 10 20 30 40 50t
-0.5
0
0.5
1
G(t
)
0.001
0.01
0.1
FIG. 3: Psd of the 2D plasma for different γ as in the legend and kT/m = ωc = 1. Inset: the ACF
function for γ = 0.1.
(3): 2D plasma in magnetic field
Consider a charged particle, confined to move on a plane in a constant magnetic field B,
which is perpendicular to the plane of motion. The equation of motion of a single particle is
r = v
v =q
mv ×B − γv +
√2γ
kT
mξ(t), (41)
where γ is the damping coefficient and T is the absolute temperature. We are interested in
the power spectrum of the x-component of the velocity vx. On the ground of the symmetry
reasons, it is clear that Svx(ω) = Svy(ω). The scalar form of the equations of motion is
vx =qB
mvy − γvx +
√2γ
kT
mξx(t),
vy = −qB
mvx − γvy +
√2γ
kT
mξy(t). (42)
In what follows we assume that the sources of the white noise ξx and ξy are uncorrelated,
implying that 〈ξx(t)ξy(t′)〉 = 0. Taking the Fourier transform, we obtain
iωvx =qB
mvy − γvx +
√2γ
kT
mξx,
iωy = −qB
mvx − γvy +
√2γ
kT
mξy. (43)
8

Finally, making use of 〈ξx(ω)ξy(ω′)〉 = 0, we get
Svx(ω) = Svy(ω) =1
2π
2kTγ
m
ω2 + γ2 + ω2c
(ω2c + γ2 − ω2)2 + 4ω2γ2
=1
2π
2kT
m
γ(ω2 + γ2)(ω2 + γ2 + ω2c )
γ2(ω2 + γ2 + ω2c )
2 + ω2(ω2 + γ2 − ω2c )
2, (44)
where ωc = qB/m is the cyclotron frequency.
The stationary ACF is found as
G(τ) =kT
me−γ|τ | cosωcτ . (45)
The psd and the ACF are shown in Fig. 3 for different values of γ as in the legend.
II. SOLVING STOCHASTIC ODES
The Wiener Process.
Central role in stochastic calculus plays the Wiener process, which has been shortly
discussed above. Consider a continuous stochastic process W (t), with the conditional prob-
ability p(w, t|w0, t0), satisfying the following (diffusion) equation
∂tp(w, t|w0, t0) =1
2∂2wp(w, t|w0, t0). (46)
It is well known that the solution of this equation with the initial condition given by the
delta function p(w, t|w0, t0) = δ(w − w0), at t = t0, is the Gaussian
p(w, t|w0, t0) =1√
2π(t− t0)exp
(−(w − w0)
2
2(t− t0)
). (47)
Using this result, we conclude that
〈W (t)〉 =∫ ∞
−∞dww p(w, t|w0, t0) = w0,
〈(W (t)− w0)2〉 = t− t0. (48)
Important is to observe that random variables ∆Wi = W (ti)−W (ti−1), with any ti > ti−1
are independent. Indeed, using the Markov property, we can write the joint distribution as
p(wn, tn;wn−1, tn−1; . . . ;w0, t0) (49)
= [p(wn, tn|wn−1, tn−1)p(wn−1, tn−1|wn−2, tn−2) . . . p(w1, t1|w0, t0)] p(w0, t0). (50)
9

Now
p(wn, tn;wn−1, tn−1; . . . ;w0, t0) =n∏
i=0
1√2π(ti − ti−1)
exp
(−(wi − wi−1)
2
2(ti − ti−1)
) p(w0, t0)
= p(∆wn; ∆wn−1 . . . ;w0). (51)
Using the last equation, we obtain
〈∆W 2i 〉 = ti − ti−1 (52)
〈W (t)W (s)|[w0, t0]〉 = 〈(W (t)−W (s))W (s)〉+ 〈W (s)2〉 = min(t− t0, s− s0) + w20.
Basics of the Ito and Stratonovich stochastic calculus
The starting point for the discussion is the relation between the Wiener process and the
white noise
∆Wi = W (ti)−W (ti−1) = ξ(ti−1)∆t. (53)
Then the solution of a general stochastic equation
x = f(x) + g(x)ξ(t), (54)
is represented via the integral
x(T ) = x(t0) +∫ T
t0x dt =
∫ T
t0[f(x(t))dt+ g(x(t))ξ(t)dt] =
∫ T
t0[f(x(t))dt+ g(x(t))dW (t)]
(55)
This result raises the question of the interpretation of a stochastic integral of the form∫ T
t0g(x(t))dW (t). (56)
This integral is understood in the mean-square limit sense. More precisely, a sequence of
random variables Xn(ω) is said to converge to X(ω) in the sense of the mean-square limit,
if
limn→∞
∫dω p(ω)[Xn(ω)−X(ω)]2 = 0 (57)
Ito stochastic integral
Consider ∫ T
t0W (t)dW (t). (58)
10

Partitioning the interval [t0, T ] into the subintervals by ti, i = 1, . . . , n, the Ito integral is
defined as the mean-square limit of the sum
n∑i=1
Wi−1(Wi −Wi−1) =n∑
i=1
Wi−1∆Wi =1
2
n∑i=1
[(Wi−1 +∆Wi)
2 − (Wi−1)2 − (∆Wi)
2]
=1
2[W (T )2 −W (t0)
2]− 1
2
n∑i=1
(∆Wi)2. (59)
Now compute the mean-square limit of the sum in the last equation. Using Eq. (52), we get
〈n∑
i=1
(∆Wi)2〉 =
n∑i=1
(ti − ti−1) = T − t0. (60)
Additionally, we have
〈[
n∑i=1
(∆Wi)2 − (T − t0)
]2〉 (61)
= 〈∑i
∆W 4i + 2
∑i<j
∆W 2i ∆W 2
j − 2(t− t0)∑i
∆W 2i + (T − t0)
2〉.
But because ∆Wi are independent Gaussian variables, it holds
〈∆W 2i ∆W 2
j 〉 = (ti − ti−1)(tj − tj−1),
〈∆W 4i 〉 = 3(ti − ti−1)
2. (62)
Finally
〈[
n∑i=1
(∆Wi)2 − (T − t0)
]2〉 (63)
= 2∑i
(ti − ti−1)2 +
∑all i,j
[(ti − ti−1 −(T − t0)
n)(tj − tj−1 −
(T − t0)
n)] = 2
(T − t0)2
n→ 0.
This completes the proof and we obtain∫ T
t0W (t)dW (t) =
1
2
[W (T )2 −W (t0)
2 − (T − t0)]. (64)
Stratonovich interpretation
The integral Eq. (58) can also be approximated by taking the mid point in every subin-
terval [ti−1, ti]
n∑i=1
1
2(Wi−1 +Wi) (Wi −Wi−1) =
1
2
n∑i=1
(Wi−1∆Wi +Wi∆Wi) (65)
=1
2
1
2(W (T )2 −W (t0)
2 −∑i
∆W 2i )−
1
2
∑i
((Wi −∆W 2i )
2 −W 2i −∆W 2
i )
=1
2
1
2(W (T )2 −W (t0)
2 −∑i
∆W 2i ) +
1
2(W (T )2 −W (t0)
2 +∑i
∆W 2i )
=
1
2(W (T )2 −W (t0)
2).
11

Change of variables: the Ito formula
Recalling that according to Eq. (52),
〈∆W 2i 〉 = ti − ti−1 = ∆t, (66)
we will shortly write in what follows dW 2 = dt.
Then it is easy to see how the differentiation chain rule for an arbitrary function F (x)
changes in case when x(t) satisfies the stochastic differential equation Eq. (54)
dF [x(t)] = F [x(t) + dx(t)]− F [x(t)]
= F ′[x(t)]dx(t) +1
2F ′′[x(t)]dx(t)2 + . . .
= F ′[x(t)] f(x)dt+ g(x)dW (t)+ 1
2F ′′[x(t)] f(x)dt+ g(x)dW (t)2 . (67)
Retaining only terms of the order of dW (t) ∼√dt and dt, we obtain
dF [x(t)] =f(x)F ′[x] +
1
2g(x)2F ′′[x]
dt+ g(x)F ′[x]dW (t). (68)
Equivalence of an Ito sde to a Stratonovich sde
Consider a Stratonovich sde
dx(t) = xdt = α(x)dt+ β(x)dW (t). (69)
The solution of this equation is represented as a sum of a regular and a stochastic
Stratonovich integrals
x(T ) =∫ T
t0α(x(t))dt+ (S)
∫ T
t0β(x(t))dW (t) (70)
=∫ T
t0α(x(t))dt+
∑i
β(1
2(xi + xi−1)
)∆Wi =
∫ T
t0α(x(t))dt+
∑i
β(xi−1 +
1
2∆xi
)∆Wi,
where ∆xi = xi − xi−1. But
β(xi−1 +
1
2∆xi
)= β(xi−1) +
∂β
∂x
1
2∆xi +
1
2
∂2β
∂x2
(1
2∆xi
)2
+ . . . (71)
Our aim is to express the r.h.s. of Eq. (70) using the Ito interpretation. To this end, we set
∆xi = a(xi−1)∆t+ b(xi−1)∆Wi, (72)
with a(x) and b(x) different from α(x) and β(x). Combining Eq. (72) and Eq. (71), we obtain
b(xi−1)∂xβ(xi−1)∆Wi.β(xi−1 +
1
2∆xi
)= β(xi−1) +
[a(xi−1)∂xβ(xi−1) +
1
4b2(xi−1)∂
2xβ(xi−1)
]1
2∆t
+1
2b(xi−1)∂xβ(xi−1)∆Wi. (73)
12

Therefore, neglecting the terms of the order of dt dW and dt2, and keeping in mind that
∆W 2i = ∆t, we conclude
(S)∫ T
t0β(x(t))dW (x(t)) = (I)
∫ T
t0β(x(t))dW (t) +
1
2(I)
∫ T
t0b(x(t))∂xβ(x(t))dt (74)
This shows that a Stratonovich sde
dx = α(x)dt+ β(x)dW (t) (75)
is equivalent to an Ito sde
dx = a(x)dt+ b(x)dW (t), (76)
where
a(x) = α(x) +1
2β(x)∂xβ(x), b(x) = β(x). (77)
Connection between Fokker-Planck equation and a stochastic sde
For an arbitrary function f(x), where x(t) satisfies the Ito sde Eq. (76), we obtain using
the Ito formula
〈df(x(t))〉 = (a(x)f ′(x) +1
2b2(x)f ′′(x)) dt, (78)
where we have used the fact that 〈dW (t)〉 = 0 and further assumed that
〈b(x(t))f ′(x(t))dW (t)〉 = 0. Then
〈df(x(t))〉dt
= 〈df(x(t))dt
〉 = d
dt〈f(x(t))〉 (79)
=∫dxf(x)∂tp(x, t|x0, t0) =
∫dx[a(x)∂xf +
1
2b(x)2∂2
xf]p(x, t|x0, t0),
where p(x, t|x0, t0) is the conditional probability. Using integration by parts and natural
boundary conditions at ±∞, we get
∫dxf(x)∂tp =
∫dxf(x)
[−∂x(a(x)p) +
1
2∂2x(b(x)
2p)]. (80)
Because f(x) is arbitrary, we are left with the equation for p(x, t|x0, t0), which is called the
Fokker-Planck equation, corresponding to the Ito sde Eq. (76)
∂tp = −∂x
[a(x)p− 1
2∂x(b(x)
2p)]= −∂xJ(x), (81)
13

where J(x) is the probability current.
Using our previous results, it is easy to show that if Eq. (76) i treated in the Stratonovich
interpretation, then the corresponding Fokker-Planck equation becomes
∂tp = −∂x
[a(x)p− 1
2b(x)∂x(b(x)p)
]= −∂xJ(x). (82)
More generally, if a system is described by a set of stochastic equations
xi = fi(x1, x2, . . . , xn) +n∑
j=1
gij(x1, x2, . . . , xn)ξj(t), (i = 1, 2, . . . , n), (83)
where ξk(t) represent sources of uncorrelated white Gaussian noise. Than in the Stratonovich
interpretation, we have
∂tp = −∂i(fip) +1
2∂i (gim∂kgkmp) . (84)
In the last equation we have used Einstein’s summation convention over a pair of repeated
indexes.
Example: active Brownian particle
The rotation of the direction vector p is described by the equation
p = η(t)× p, (85)
where η is a 3-dimensional vector with components given by uncorrelated white Gaussian
noise, i.e 〈ηi(t)ηk(t′)〉 = 2Dδ(t − t′), and the indexes (i, k) = (1, 2, 3), corresponding to
(x, y, z).
We want to show that if Eq. (85) is treated in the Stratonovich interpretation, than it
gives rise to the following Smoluchowski equation for the probability density ρ(p)
∂tρ = DR2ρ, (86)
where R = p×∇p.
Recall that the cross product between any two vectors a and b can be written with the
help of the antisymmetric unity tensor Eijk, which is equal either to ±1 for all different (ijk)
(= +1 for (ijk) = (123)), or it is equal to 0 if any two indexes (ijk) are identical.
a× b = Eijkajbkei, (87)
where ei denotes the unity vector, pointing along the i-axes.
14

Eq. (86) can be rewritten in terms of Eijk
∂tρ = D (Eijkpj∂pkEimspm∂ps) ρ, (88)
Than in the Stratonovich interpretation, we have
∂tρ =1
2∂i (σim∂kσkmρ) (89)
By comparing Eq. (85) with Eq. (83), we see that
σik = Eikmpm. (90)
Now we can rewrite Eq. (89) for the case of Eq. (85)
∂tρ = 2D1
2∂pi (Eimsps∂pkEkmjpjρ) (91)
Finally, after noticing that ∂pipk = δik and after the appropriate permutation of indexes in
Eq. (91), we conclude that Eq. (91) and Eq. (88) are identical.
How to use the Fokker-Planck equation to compute the evolution equation
for the moments 〈xm(t)〉.
Example: diffusion coefficient of a classical Brownian particle.
Consider one-dimensional motion of a classical particle m in contact with a fluctuating
environment
x =p
m
p = −αp+√2Dξ(t), (92)
where α is the damping coefficient and D characterizes the strength of fluctuations. The
corresponding Fokker-Planck equation is given by
∂tρ(x, p, t) = −∂x
(p
mρ)+ ∂p[αpρ+D∂pρ]. (93)
The stationary solution is x-independent
ρs =
√α
2πDexp
(−αp2
2D
). (94)
In order to recover the Maxwell’s velocity distribution at temperature T
ρs(v) =
√m
2πkTexp
(−mv2
2kT
), (95)
15

one needs to impose the Einstein’s condition
D = αmkT. (96)
We are interested in the diffusion coefficient of the particle
D∞ = limt→∞
〈(x(t)− x(0))2〉2t
. (97)
In order to find 〈x(t)〉, we use the Fokker-Planck equation, integration by parts and natural
BCs at ±∞
∂t〈x(t)〉 =∫
dxdp x∂tρ(x, t) =∫
dxdp x[∂x
(− p
mρ)+ ∂p[αpρ+D∂pρ]
]=
〈p(t)〉m
.(98)
Similarly, we find the equations for 〈p(t)〉, 〈x(t)p(t)〉, 〈p(t)2〉 and 〈x(t)2〉
∂t〈p(t)〉 =∫
dxdp p∂tρ(x, t) =∫
dxdp p[∂x
(− p
mρ)+ ∂p[αpρ+D∂pρ]
]= −α〈p(t)〉,
∂t〈x(t)p(t)〉 =∫
dxdp px[∂x
(− p
mρ)+ ∂p[αpρ+D∂pρ]
]=
〈p(t)2〉m
− α〈x(t)p(t)〉
∂t〈x(t)2〉 =∫
dxdp x2[∂x
(− p
mρ)+ ∂p[αpρ+D∂pρ]
]=
2〈x(t)p(t)〉m
∂t〈p(t)2〉 =∫
dxdp p2[∂x
(− p
mρ)+ ∂p[αpρ+D∂pρ]
]= −2α〈p(t)2〉+ 2D. (99)
Eqs. (98,99) represent a closed system of linear equations for the first five moments, which
can be solved analytically
〈p(t)〉 = p0e−α(t−t0) (100)
〈p(t)2〉 =D
α
(1− e−2α(t−t0)
)+ p20e
−2α(t−t0)
〈x(t)〉 = x0 +p0αm
(1− e−α(t−t0)
)〈x(t)p(t)〉 =
D
α2m−(
p20αm
− D
α2m
)e−2α(t−t0) +
((xp)0 −
2D
α2m+
p20αm
)e−α(t−t0)
〈x(t)2〉 =2Dt
(αm)2+ C1e
−α(t−t0) + C2e−2α(t−t0). (101)
The terms proportional to C1 and C2 vanish in the limit t → ∞ in Eq. (97) and we finally
obtain
D∞ =D
(αm)2=
kT
αm. (102)
16

Numerical solution of stochastic equations
In practice, stochastic equations can be solved using methods with much lower accuracy
then the solution of the corresponding deterministic equations would require.
Thus, the√dt-accurate Euler scheme for equation Eq. (76) in the Ito interpretation is
given by
x(t+ dt) = x(t) + a(x(t))dt+ b(x(t))dW (t),
dW (t) = N(0, 1)√dt, (103)
where N(0, 1) is a normally distributed random number with variance one and zero mean.
The corresponding numerical scheme for the Stratonovich interpretation is
y = x(t) + a(x(t))dt+ b(x(t))dW (t),
x(t+ dt) = x(t) +1
2(x(t) + x(y)) dt+
1
2(b(x(t)) + b(y)) dW (t),
dW (t) = N(0, 1)√dt, (104)
where dW (t) is the same in the first and in the second equations.
The advantage of this method is the fact that it is explicit. We now show that this
explicit algorithm is indeed equivalent to the implicit algorithm, which corresponds to the
definition of the Stratonovich interpretation.
Thus, according to the definition of the Stratonovich integration, we should have had the
following implicit scheme
x =x(t+ dt) + x(t)
2,
x(t+ dt) = x(t) + a(x)dt+ b(x)dW (t),
dW (t) = N(0, 1)√dt. (105)
For simplicity set a(x) = 0 and use the Newton’s method to solve the algebraic equation
0 = x(t+ dt)− x(t)− b
(x(t) + x(t+ dt)
2
)dW (t). (106)
The iteration scheme of the Newton’s method for an algebraic equation g(y) = 0 is
y(n+1) = y(n) − g(y(n))
g′(y(n)). (107)
17

By setting y(n) = x(t) and y(n+1) = x(t+ dt), we obtain in our case
x(t+ dt) = x(t)− −b(x(t))dW (t)
1− 12b′(x(t))dW (t)
(108)
≈ x(t) + b(x(t))dW (t) +1
2b(x(t))b′(x(t))dt+O(dt dW (t)).
This result is equivalent to Eq. (104). Indeed
x(t+ dt) = x(t) +1
2(b(x(t)) + b(x(t) + b(x(t))dW (t))) dW (t)
= x(t) + b(x(t))dW (t) +1
2b(x(t))b′(x(t))dt+O(dt dW (t)). (109)
18