An advanced protection technique based on pattern ... · An advanced protection technique based on...
11
An advanced protection technique based on pattern recognition using wavelet transform in AT feeding system 1 Hosung Jung, Moonseob Han, Sanggi Chung, Young Park, Hyenjune Park Korea Railroad Research Institute, Uiwang-City, Korea 1 Abstract Distance relay and ΔI fault selective relay are used for main and backup protection relay for protection in AT feeding system in Korea. However, it is very difficult to classify fault and normal operation situation due to the train operation increase. Especially in the case of high impedance fault caused by the touch of tree, working vehicles, etc, the conventional protection relay can’t detect fault because fault current is very small. In this case, continuous arc can damage electric facility at fault point and stop train operation at the worst. So, we present an advanced technique to classify high impedance fault and temporary overload operation using wavelet transform and pattern recognition technique in this paper. For this, we model AT feeding system, electric train and arcing fault using PSCAD/EMTDC and simulate the worst operation scenario among the various operation and fault situation. And we extract characteristics of high impedance fault and worst operation conditions using wavelet transform and detect a fault using adaptive network fuzzy inference system based on pattern recognition. Finally, we analyze fault detection performance of the proposed technique compared with the conventional distance relay. Keywords: Adaptive network fuzzy inference system, AT Feeding system, Distance relay, High impedance fault, Wavelet transform, Pattern recognition 1. Introduction Most electric railway system in Korea adapts AT (autotransformer) feeding system because it has the merits reducing the voltage drop and power loss and expanding the distance between substations. For the reliable operation in AT feeding system, distance relay and ΔI fault selective relay are installed for the main and backup protection relay in substation. However, protection relay is sometimes caused malfunction in the normal operation situation by the various train operation conditions such as increase of train operation, running of different control locomotives in the same feeding section, operation of generative and regenerative mode in the same time, etc. Especially, in the case of high impedance fault caused by the touch of tree, working vehicles, etc, conventional protection relay cannot detect high impedance fault because fault current is very small. In this case, continuous arc is generated and it can damage electric facility and human being and stop train operation at the worst. For the reliable protection relay, the characteristics of voltage and current signal during normal operation, short fault and high impedance fault situation must be precisely analyzed. However, the conventional protection relays cannot classify the various situations because they use the magnitude and change of voltage, current and low harmonics components. In this paper we use wavelet transform to analyze characteristics of the voltage and current signal. The various protection techniques using wavelet transform are already studied and adapted in power system such as the protection of transmission line, transformer or generator. Wavelet transform can extract the various information from transient signal in time domain by decomposing the transient signal with short scale of window for high frequency band while with long window scale for low frequency band using scale and shift technique, contrary to Fourier transform. Accordingly, it is effective for analyzing of transient signals containing various harmonics. To classify the fault and normal operation situation, we present an advanced technique based on pattern recognition using adaptive network fuzzy interference system(ANFIS). ANFIS can use many various characteristics extracted by wavelet transform for detecting a fault.
Transcript of An advanced protection technique based on pattern ... · An advanced protection technique based on...

An advanced protection technique based on pattern recognition
using wavelet transform in AT feeding system
1Hosung Jung, Moonseob Han, Sanggi Chung, Young Park, Hyenjune Park
Korea Railroad Research Institute, Uiwang-City, Korea1
Abstract
Distance relay and ΔI fault selective relay are used for main and backup protection relay for protection in AT feeding system in Korea. However, it is very difficult to classify fault and normal operation situation due to the train operation increase. Especially in the case of high impedance fault caused by the touch of tree, working vehicles, etc, the conventional protection relay can’t detect fault because fault current is very small. In this case, continuous arc can damage electric facility at fault point and stop train operation at the worst. So, we present an advanced technique to classify high impedance fault and temporary overload operation using wavelet transform and pattern recognition technique in this paper. For this, we model AT feeding system, electric train and arcing fault using PSCAD/EMTDC and simulate the worst operation scenario among the various operation and fault situation. And we extract characteristics of high impedance fault and worst operation conditions using wavelet transform and detect a fault using adaptive network fuzzy inference system based on pattern recognition. Finally, we analyze fault detection performance of the proposed technique compared with the conventional distance relay. Keywords: Adaptive network fuzzy inference system, AT Feeding system, Distance relay, High impedance fault, Wavelet transform, Pattern recognition
1. Introduction
Most electric railway system in Korea adapts AT (autotransformer) feeding system because it has the merits reducing the voltage drop and power loss and expanding the distance between substations. For the reliable operation in AT feeding system, distance relay and ΔI fault selective relay are installed for the main and backup protection relay in substation. However, protection relay is sometimes caused malfunction in the normal operation situation by the various train operation conditions such as increase of train operation, running of different control locomotives in the same feeding section, operation of generative and regenerative mode in the same time, etc. Especially, in the case of high impedance fault caused by the touch of tree, working vehicles, etc, conventional protection relay cannot detect high impedance fault because fault current is very small. In this case, continuous arc is generated and it can damage electric facility and human being and stop train operation at the worst. For the reliable protection relay, the characteristics of voltage and current signal during normal operation, short fault and high impedance fault situation must be precisely analyzed. However, the conventional protection relays cannot classify the various situations because they use the magnitude and change of voltage, current and low harmonics components. In this paper we use wavelet transform to analyze characteristics of the voltage and current signal. The various protection techniques using wavelet transform are already studied and adapted in power system such as the protection of transmission line, transformer or generator. Wavelet transform can extract the various information from transient signal in time domain by decomposing the transient signal with short scale of window for high frequency band while with long window scale for low frequency band using scale and shift technique, contrary to Fourier transform. Accordingly, it is effective for analyzing of transient signals containing various harmonics. To classify the fault and normal operation situation, we present an advanced technique based on pattern recognition using adaptive network fuzzy interference system(ANFIS). ANFIS can use many various characteristics extracted by wavelet transform for detecting a fault.

#1 #2
#2 #3
#1
EM55
IMT55U
IMF55U
C
B
A
BRK_BU
C
B
A
BRK_BD
C B A
BR
K_D
KU
_SSP
CBA
BRK
_DK
D_S
SP
Contanct Wire
Rail
Feeder Wire
T1
R1
F1
T2
R2
F2
Catanary Model
RRL
RRL
A
B
C
RLRRL
LINE1
1
LINE1
1
LINE1T
Contanct Wire
Rail
Feeder Wire
T1
R1
F1
T2
R2
F2
Catanary Model
Contanct Wire
Rail
Feeder Wire
T1
R1
F1
T2
R2
F2
Catanary Model
Contanct Wire
Rail
Feeder Wire
T1
R1
F1
T2
R2
F2
Catanary Model
IMT55D
IMF55D
BR
K_TI
E_B
Y
BR
K_T
IE_B
Y
C B A
BR
K_B
U_S
P
M Phase
For this, we model AT feeding system, electric train and arcing fault using PSCAD/EMTDC which is power system analysis program and simulate the worst operation scenario among the various operation and fault situations. And we extract characteristics of high impedance fault and worst operation situations using wavelet transform and detect a fault using ANFIS based on pattern recognition. Finally we analyze fault detection performance of the proposed technique compared with the conventional distance relay.
2. AT feeding system modeling
2.1 Modeling and protection of AT feeding circuit
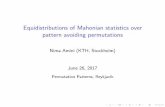
AT feeding system largely consists of the power utility, feeding substation(SS), sectioning post(SP), sub sectioning post(SSP) and catenary circuit. Three-phase 154 kV of power utility is supplied to feeding substation through power transmission lines and converted into two 50 kV single phases using Scott transformer at the feeding substation. And the converted single phase power is again converted into 25 kV through autotransformer and it is supplied to electric train. At the sectioning post and sub-sectioning post, 25 kV is supplied to upper line and lower line respectively using autotransformer to prevent voltage drop. Catenary circuit is largely classified into upper and lower catenary line group, upper and lower power feeder line group and rail group. And catenary circuit is modeled into equivalence circuit model using Carson-pollazek method and removing mutual impedance effect. Figure 1 shows the model of AT feeding system using PSCAD/EMTDC and the parameters of each component are as follows Table 1[3,4].
Figure 1: AT feeding system model
component Based value value Power utility (positive impedance) 100 MVA 0.1997+j2.2638 [Ω]
Transmission Line (positive impedance) 100 MVA 0.0838+j0.4654 [Ω/km] Scott Transformer 22.5 MVA j12.5 [Ω] Autotransformer 10 MVA j0.4 [Ω]
Catenary-Rail Short fault impedance 27.5 kV 0.2628+j0.7077 [Ω/km] Distance of SS - SSP - 10.572 [km] Distance of SSP - SP - 9.167 [km]
Table 1: Parameters of model system
Sectioning Post
Sub Sectioning Post Substation
Power Utility

For the protection of catenary circuit in AT feeding system, distance relay(44F) and I fault selective relay(50F) are applied in dual mode. The main protection relay, distance relay calculates impedance using voltage and current measured at substation as shown in the expression (1) and detects a fault in case the calculated value converges into protective zone. In general, distance relay is set up to 120% of line impedance between substation and sectioning post in order to eliminate any unprotected area.
2/)( TF
FTTF II
VZ
(1)
Here, TFZ is fault impedance, FTV is feeder voltage between feeder line and catenary line, and
FI and TI are the current of feeder line and catenary line. I fault selective relay which is backup protective relay compares the magnitude of current increment by notch of load current( 1I ) and the magnitude of current increment of fault current( 2I ) such as expression (2).
21 III (2) Figure 2 shows the general protective zone of distance relay and I fault selective relay.
Figure 2: Protection zone of AT feeding circuit
Distance relay and I fault selective relay may malfunction due to the inrush current of AT and train’s transformer during unloading or increase of the maximum load current in case of sudden load increase. To prevent it, the protection relay has blocking function using low order harmonics because low order harmonics in fault current is relatively not more than that of load current[1,2].
2.2 Analysis of load characteristics in AT feeding system
In AT feeding system, there are two types of locomotives with the thyristor phase control type and PWM control type. Their electric characteristics are different depending on the control method. For modeling of electric locomotive using PSCAD/EMTDC, the power of the locomotive from starting to their maximum speed are divided into 10 steps and the magnitude of active and reactive power of each step is converted into resistance and reactance. And maximum harmonics value of each step is modeled by constant current source. Figure 3 shows the load area of thyristor phase control type and PWM control type. We can see that the power factor of thyristor phase control type from substation at the time of maximum powering mode is approximately 0.7~0.8 while the power factor of PWM control type is approximately +1.

Figure 3: Load area to the locomotive type
Electric locomotives generate a lot of harmonic current during operation. Figure 4 shows the temporary overload current and harmonics of thyristor phase control type. Generally thyristor phase control type contains harmonics up to approximately 15% and PWM control vehicle contains approximately 5% whereas almost no harmonics is contained at the time of short fault.
0 60 120 180 240 300 3600.0
0.2
0.8
Time [s]
Frequency [Hz]
Am
plitu
de
0.25 0.30 0.35 0.40 0.45 0.50-2,000
-1,000
0,000
1,000
2,000
Cur
rent
[A]
Harmonoic Analysis
Load Current
Figure 4: Load current and harmonics
2.3. Arcing fault modeling
Short fault occurring at the catenary circuit can be easily detected by protection relay because the fault current increases much bigger than operation current. However high impedance fault occurred by contacts with tree or working vehicles cannot be easily detected because the fault current is relatively small. Generally in the case of high impedance fault, the fault current is very small due to fault resistance and contains continuous and irregular arc due to incomplete earth. This arc current has asymmetric and random current characteristics and has many harmonics compared to short fault. Figure 5 shows the arcing fault model. The Buchholz model comprised with two DC power sources and diodes in anti-parallel connections is used to model arcing fault using PSCAD/EMTDC. In order to implement the nonlinear and asymmetric characteristics of arcing fault in more detail, the Buchholz model is connected in serial with a non-linear variable resistor model whose internal voltage is controlled using square wave and quadratic control function to reduce the resistance of the variable resistor according to duration time of fault. The harmonics in arcing fault is added using random noise model[6,7].

If
7.5 +
DDEd
Ef
R=0
V
R=0
V
DC_in_L
IfFault_hTimedFaultLogic
DC_in_R
Random30 1
7.741.01 8
*1.0005
R_in
DC_in_Laa
Delay
T
Random30 1
7.741.01 8
*5
D +
F
+G
1 + 2z sWo + s
Wo22
sWo
1 - sWo
*0.9995
Fault_h
DC_in_R
Figure 5: Arcing fault model using PSCAD/EMTDC
Figure 6 shows the comparison between typical arcing fault current and simulation current. Dc voltage of two dc power sources is varied randomly from 19.44kV to 27.5kV, the initial value of the variable resistor is 7.5[Ω], and the fault resistance is controlled by varying internal voltage of the variable resistor in this simulation. In the initial phase of the simulated arcing fault irregular and random arc current is generated by the fault resistance, and the fault current increases along with the time of fault duration such as typical arcing fault current.
0 .20 0 .2 5 0 .30 0 .35 0 .40 0 .45
-2
-1
0
1
2
Curre
nt [P
U]
T im e [s ]
A rcing C urrent
(a) Typical arcing fault current (b) Simulation current
Figure 6: Comparison with arcing fault current
3. Pattern recognition technique using wavelet transform
3.1 Extraction of characteristics using wavelet transform
Wavelet transform is possible to extract information in time domain by decomposing the transient signal with short scale of window for high frequency band while with long window scale for low frequency band using scale and shift technique, contrary to Fourier transform[5]. Accordingly, it is effective for analyzing of transient signal containing harmonics by using discrete wavelet transform as shown in (3).
ma
mnaknSD
mbaa
0
0][1
0
, (3)
Where, ma0 is variable for scale, mna0 is variable for shift, and ma01 is energy normalization component to keep the same scale as mother wavelet.

The important elements in analyzing transient signal using wavelet transform are to select mother wavelet and to decide the number of multiple decomposition steps. As for mother wavelets, Harr, Daubechies, Biorthogonal, Coiflets, and Symlets may be listed, of which forms and properties are different depending on their types. Accordingly optimum mother wavelet should be selected comparing the capabilities of removing harmonics as well as extracting characteristics from fault signals. In addition, number of decomposition steps is influenced from the sampling frequency of original signal. In this paper, db5 is selected for mother wavelet, which has 4 nodal points of dubieties of which discrete wavelet analysis is available, by comparing with performance of characteristics extraction. Because simulation frequency is 3840 Hz (64 sample/cycle) we select 3 step decompositions. So we can extract 4 signals which are D1, D2, and D3 components in high frequency domain and A3 component in low frequency domain. D1 component, the most high frequency component is decomposed to 1920 ∼ 960 Hz band, D2 component to 960 ∼ 480 Hz, D3 component to 480 ∼ 240 Hz, and A3 component, the most low frequency component to 240 Hz ∼ DC signal band of transient signal.
0.2 0.3 0.4-2
0
2
Inpu
t sig
nal
0.2 0.3 0.4
-404
0.2 0.3 0.4-2
0
2
0.2 0.3 0.4-0.03
0.00
0.03
D1
com
pone
nt
0.2 0.3 0.4-0.03
0.00
0.03
0.2 0.3 0.4-0.03
0.00
0.03
0.2 0.3 0.4-0.05
0.00
0.05
D2
com
pone
nt
0.2 0.3 0.4-0.05
0.00
0.05
0.2 0.3 0.4-0.05
0.00
0.05
0.2 0.3 0.4-0.2
0.0
0.2
D3
com
pone
nt
0.2 0.3 0.4-0.2
0.0
0.2
0.2 0.3 0.4-0.2
0.0
0.2
0.2 0.3 0.4-2
0
2
A3
com
pone
nt
Temorary overload0.2 0.3 0.4
-404
Short fault0.2 0.3 0.4
-2
0
2
High impedance fault Figure 7: Output of wavelet transform
Figure 7 shows the results of the wavelet transform according to temporary overload, short fault, and high impedance fault. It can be seen that the components extracted by wavelet transform show large changes at rapid load change and fault occurrence time. Since the temporary overload current has some of harmonic, the magnitude of the D1, D2, and D3 components is larger than a certain level, and especially, very large when the speed changes sharply. In case of short fault the magnitudes become large temporarily at the time of fault occurrence and almost disappear after the fault. On the opposite, in case of high impedance fault, the fault current is small and not distinctive from the overload current. However, since the fault current contains arc current, the D1, D2 and D3 components of wavelet transform are large and continuous from fault occurrence time and clearly distinctive from the temporary overload current. Therefore, normal operation, temporary overload, short fault, and high impedance fault can be distinguished with the magnitude of fault current and wavelet transform components.

3.2 Fault classification based on pattern recognition
The characteristics of normal operation, temporary overload, short fault, and high impedance fault can be identified using the D1, D2, D3 and A3 components obtained by wavelet transform. However, since the magnitude of the wavelet transform components varies by the fault conditions such as the fault distance, impedance, and phase angle of fault, as well as the train operational condition, unwanted operation of protection relay can be resulted if the fault detection technique uses only one component. Therefore, it is advantageous to apply fuzzy inference system which can provide final output using the many rules patterned by the characteristics of all the components obtained by wavelet transform. The membership functions of fuzzy inference system are determined arbitrarily by experiences of expert. But it is difficult to define the components derived by wavelet transform arbitrarily, so in order to minimize error resulted in arbitrary definition of the membership function by user, the adaptive network fuzzy inference system(ANFIS) which automatically divides the fuzzy spaces of membership function using the learning function of neural network. The ANFIS enables more accurate pattern recognition since it can automatically readjust the fuzzy space of membership function and fault classification rules by the learning function of the neural network. In this paper, the magnitudes of the D1, D2, D3 and A3 components obtained by wavelet transform are used as the input parameters. Since the D1, D2 and D3 components alternate between plus and minus, the magnitudes are calculated by summing up the absolute values for a cycle and for the A3 which is a low frequency component, RMS value is compared. Especially, since the D1 which is a high frequency component is very sensitive to the changes of the signals such as load variance and fault occurrence, the ratio of the magnitude of the present value to the maximum value is used to discriminate the continuance of signal, rather than comparing with its only magnitude. Table 2 lists the magnitude of input and output parameters of each situation used for the learning of the ANFIS. The input consists of four parameters, and the data are collected over one period after rapid operation change and fault occurrence. The output parameters are defined according to each situation that the output value of normal operation is 1, temporary overload is 2, high impedance fault is 3, and short fault is 4. The learned ANFIS monitors fault discrimination for each sample. In order to prevent maloperation of temporary variance, it determines that the error of the output value converges within ±0.1 of preset output value and give final determination when the some output value continue for more than 1cycle.
Input parameters
Input 1 Input 2 Input 3 Input 4 situation
max11
11 ||/||
cyclecycleDD
cycleD
12 ||
cycleD
13 ||
rmsA3
Output parameter
Normal operation High Low Low Low 1
Temporary overload Low Low Low Medium 2
HIF High High High Medium 3
Short fault Low Low Low High 4
Table 2: Input and output characteristics of ANFIS The input parameters for the ANFIS are normalized between 0 and 1 for the learning of the neural network. And if values are larger than 1 the values are normalized into 1. The input parameters 1, 2 and 3 using the magnitude of the high frequency are constructed with two membership functions of High and Low, and the input parameter 4 using the magnitude of low frequency component is constructed with three membership functions of High, Medium and Low. Figure 8 shows the fuzzy space of the membership functions of the input parameters which are automatically divided according to the input pattern after the learning of the neural network. The total number of learning is 500, and the total error is 0.001.

0 0.5 10
0.2
0.4
0.6
0.8
1
0 0.5 10
0.2
0.4
0.6
0.8
1
0 0.5 10
0.2
0.4
0.6
0.8
1
0 0.5 10
0.2
0.4
0.6
0.8
1
low
low
low
low
high high
high high medium
Input 1 Input 2
Input 3 Input 4
0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
0.2 0.4 0.6 0.80
0.2
0.4
0.6
0.8
1
0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
low
low
low
low
high high
high high medium
Input 1 Input 2
Input 3 Input 4
(a) Initial membership function (b) Final membership function
Figure 8: Membership function after learning Figure 9 shows the flowchart of the fault discrimination technique based on pattern recognition using wavelet transform and ANFIS. The impedance is calculated by existing distance relay with the voltage and current measured at substation, and fault is discriminated when the calculated impedance converges into protection area. If calculated impedance does not converge into protection area, the advanced technique classifies normal operation and fault situations using wavelet transform and ANFIS.
Figure 9: Flowchart of an advanced protection technique
4. Result of simulation
4.1 Result of short fault using distance relay
To simulate various fault and operation situations, AT feeding system is modeled by using PSCAD/EMTDC as shown in the Figure 1 and Table 1. Figure 10 shows whether the impedance converges into the protective area of the existing distance relay according to the fault distance and the change of fault impedance, when catenary line - rail short fault occurs.

0 10 20 30 40 50 600
10
20
30
40
50
60
44F
50F
R [ohm]
10% 30% 50% 70% 90%
Line Impedance
X [ohm] Catenary-Rail Short Fault
0 50 100 1500
50
100
50F44F
Maximum Load area
R [ohm]
1[ohm] 5[ohm] 10[ohm] 30[ohm] 50[ohm]
Line Impedance
X [ohm]Catenary-Rail Short Fault
(a) Fault distance (b) Fault impedance
Figure 10: Convergence of fault Impedance using distance relay Figure 10(a) shows the fault cases occurred at 10%, 30%, 50%, 70% and 90% of the location from substation to subsectioning post. It can be seen that the calculated impedance converges precisely into the protective area regardless of the fault distance. Figure 10(b) shows the convergence of impedance at the fault location of 50% when the fault impedance is 1, 5, 10, 30, and 50[Ω]. When the fault impedance is 10[Ω] or smaller, the calculated impedance converges into the protective area, but when the fault impedance exceeds 10[Ω], it cannot converge into the protective area and cannot detect the fault. Therefore, in case of high impedance fault, it is difficult to detect high impedance fault in conventional distance relay.
4.2 Result of an advanced technique
Figure 11 shows the input normalized parameters of normal operation, temporary overload, high impedance fault, and short fault situations for ANFIS testing. As shown in the Table 2, the values of the input parameters are in accordance with the respective condition, but differ temporarily at the moment of load current change and fault occurrence at 0.25[s]. Here, the normal operation represents one train operation in one feeding section and the temporary overload is twice the maximum load temporarily. And the fault occurs at 50% location from substation during maximum load operation and the fault impedance is 30[Ω] for high impedance fault and 0.1[Ω] for short fault.
0.21 0.23 0.25 0.27 0.29 0.310.0
0.2
0.4
0.6
0.8
1.0
0.21 0.23 0.25 0.27 0.29 0.310.0
0.2
0.4
0.6
0.8
1.0
0.21 0.23 0.25 0.27 0.29 0.310.0
0.2
0.4
0.6
0.8
1.0
0.21 0.23 0.25 0.27 0.29 0.310.0
0.2
0.4
0.6
0.8
1.0 Input 4Input 3
Input 2
Normal Temp. Overlaod HIF Short Fault
Input 1
Figure 11: Input parameters of ANFIS

Figure 12 shows the output values of the ANFIS for the inputs shown in the Figure 11. The output value maintains 1 in normal operation and rises to 2 in temporary overload. It converges to 3 in 0.1[s] after high impedance fault occurrence and 4 in 0.2[s] after short fault occurrence. Though the magnitudes of temporary overload current increases to high impedance fault current similarly, they can be precisely discriminated with the advanced technique. Considering that the fault determination is made when the output maintains its value for 1 cycle, the faults can be detected about 0.2[s] after the fault occurrence.
0.21 0.23 0.25 0.27 0.29 0.31
1
2
3
4Short Fault
High Impedance Fault
Normal Operation
AN
FIS
Out
put
Time [s]
Temporary Overload
Figure 12: Output of ANFIS
Table 3 presents the output values of ANFIS according to the fault impedance change. High impedance fault can be precisely detected for the maximum fault impedance value of 50[Ω], which is larger than 10[Ω] in the conventional distance relay method. In case of fault impedance is over 50[Ω], although fault current is smaller than normal current, ANFIS output does not deviate the target value largely.
Fault Impedance [Ω] 10 20 30 40 50 60 70 80 90 100
ANFIS output 2.98 2.93 2.92 2.97 2.94 2.88 2.82 2.76 2.73 2.68
Table 3: ANFIS output to the fault impedance
5. Conclusion
In this paper, we present an advanced fault detection technique using wavelet transform and ANFIS based on pattern recognition. This technique can classify normal operation and fault situations especially high impedance fault containing arc resistance. In order to obtain normal operation and fault data, we model an AT feeding system, electric train and high impedance fault using PSCAD/EMTDC. In order to classify the characteristics of operation and fault situations, the magnitude ratio of D1 component, magnitudes of D2 and D3 components, and the RMS value of A3 component are extracted. To pattern the magnitudes of the components, the ANFIS which defines the membership function of the input parameters by learning of neural network is used to pattern normal operation, temporary overload, high impedance fault and short fault. The fault detection technique presented in this paper can precisely classify operation and fault situations. Especially, the high impedance fault which are difficult to be detected with the conventional distance relay can be precisely detected. It is expected that this technique will be able to improve the performance of AT feeding system protection. Further studies would be required to develop more reliable protection techniques using various real fault data.

Acknowledgements
This research was supported by a grant (07 Urban Transit Standardization A01) from "the 2nd phase of R&D on the urban transit standardization" funded by Ministry of Construction & Transportation of Korean government.
References
[1] Gao Shibin, He Weijun, Chen Xiaochuan, “Study on Microprocessor-Based Adaptive Protective Relay for Heavy Duty Electric Traction System” , Developments in Power System Protection Conference Publication No. 434, pp319-322, 1997
[2] Hosung Jung, "A study on relay setting for AT feeding system protection using PSCAD/EMTDC", ICEE 2005, pp.A76-A76, 2005
[3] Hosung Jung, Young Park, Moonseob Han, Hyenjune Park, “High Impedance fault detection Technique for the reliable power feeding in AT railway system”, the Second International Conference on Engineering Failure Analysis, 2006
[4] Manitoba HVDC Research Centre, “PSCAD/EMTDC User’s manual” [5] Michel Misiti, "Wavelet Toolbox User's Guide", MathWorks, 1996 [6] M. B. Djuric, "Time Domain Solution of Fault Distance Estimation and Arcing Fault Detection on
Overhead Lines", IEEE Transactions on Power Delivery, Vol. 14, No. 1, pp60-67, 1999 [7] W.H. Kwon, G.W. Lee, Y.M. Park, M.C. Yoon and M.H. Yoo, "High Impedance Fault Detection
Utilizing Incremental Variance of Normalized Even Order Harmonic Power", IEEE Transactions on Power Delivery, Vol.6, No2, pp. 557-564, 1991