A Theory of Solvability for Lossless Power Flow Equations
92
A Theory of Solvability for Lossless Power Flow Equations John W. Simpson-Porco Future Electric Power Systems and the Energy Transition Champ´ ery, Switzerland February 4, 2019
Transcript of A Theory of Solvability for Lossless Power Flow Equations

A Theory of Solvability for LosslessPower Flow Equations
John W. Simpson-Porco
Future Electric Power Systems and the Energy Transition
Champery, Switzerland
February 4, 2019

This talk is based on these papers
1 / 24

Problems in power system operations
Power Flow Analysis� �
�
�
� �
�
�
��
��
��
��
��
���
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��� ��
��
��
������
��
��
��
��
��
��
��
�� �� ��
��
��
��
����
��
��
��
��
��
�� �� ����
����
��
��
��
��
��
��
��
��
��
��
���
��
��
��
��
��
��
��
��
��� ��
��
��
��
��
��
��
����
��
��
��
�� ��
����
��
��
����
��
��
��
��
���
������
���
��� ���
���
���
���
���
���
���
���
G
G
G
G
G G
G
G
GG
G
GG
G
G
G
G G
G
G
G
G
G G
G G
G
G G
G
G
G
G
G G G G G
G
G
�
G
G
G
G
G
G
G
G
G
G
G
G
G
G
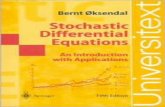
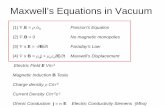
2QH�OLQH�'LDJUDP�RI�,(((�����EXV�7HVW�6\VWHP
,,7�3RZHU�*URXS������
6\VWHP�'HVFULSWLRQ�
����EXVHV����EUDQFKHV���ORDG�VLGHV���WKHUPDO�XQLWV
Contingency Analysis
[Rezaei et al.]
Optimal Power Flow
[Molzahn et al.]
Transient Stability
[Overbye et al.]2 / 24

Modeling AC power flow
• active power: Pi =∑
j ViVjBij sin(θi − θj)
• reactive power: Qi = −∑
j ViVjBij cos(θi − θj)
6 n Loads ( ) and m Generators ( ) N = NL ∪NG
7 Load Model: PQ bus constant Pi constant Qi
8 Generator Model: PV bus constant Pi constant Vi ,
Power Flow Equations
Pi =∑
jViVjBij sin(θi − θj) , i ∈ NL ∪NG
Qi = −∑
jViVjBij cos(θi − θj) , i ∈ NL
2n + m equations in variables θ ∈ Tn+m and VL ∈ Rn>0.
3 / 24

Modeling AC power flow
• active power: Pi =∑
j ViVjBij sin(θi − θj)
• reactive power: Qi = −∑
j ViVjBij cos(θi − θj)
6 n Loads ( ) and m Generators ( ) N = NL ∪NG
7 Load Model: PQ bus constant Pi constant Qi
8 Generator Model: PV bus constant Pi constant Vi ,
Power Flow Equations
Pi =∑
jViVjBij sin(θi − θj) , i ∈ NL ∪NG
Qi = −∑
jViVjBij cos(θi − θj) , i ∈ NL
2n + m equations in variables θ ∈ Tn+m and VL ∈ Rn>0.
3 / 24

Modeling AC power flow
• active power: Pi =∑
j ViVjBij sin(θi − θj)
• reactive power: Qi = −∑
j ViVjBij cos(θi − θj)
6 n Loads ( ) and m Generators ( ) N = NL ∪NG
7 Load Model: PQ bus constant Pi constant Qi
8 Generator Model: PV bus constant Pi constant Vi ,
Power Flow Equations
Pi =∑
jViVjBij sin(θi − θj) , i ∈ NL ∪NG
Qi = −∑
jViVjBij cos(θi − θj) , i ∈ NL
2n + m equations in variables θ ∈ Tn+m and VL ∈ Rn>0.
3 / 24

Modeling AC power flow
• active power: Pi =∑
j ViVjBij sin(θi − θj)
• reactive power: Qi = −∑
j ViVjBij cos(θi − θj)
6 n Loads ( ) and m Generators ( ) N = NL ∪NG
7 Load Model: PQ bus constant Pi constant Qi
8 Generator Model: PV bus constant Pi constant Vi ,
Power Flow Equations
Pi =∑
jViVjBij sin(θi − θj) , i ∈ NL ∪NG
Qi = −∑
jViVjBij cos(θi − θj) , i ∈ NL
2n + m equations in variables θ ∈ Tn+m and VL ∈ Rn>0.
3 / 24

Modeling AC power flow
• active power: Pi =∑
j ViVjBij sin(θi − θj)
• reactive power: Qi = −∑
j ViVjBij cos(θi − θj)
6 n Loads ( ) and m Generators ( ) N = NL ∪NG
7 Load Model: PQ bus constant Pi constant Qi
8 Generator Model: PV bus constant Pi constant Vi ,
Power Flow Equations
Pi =∑
jViVjBij sin(θi − θj) , i ∈ NL ∪NG
Qi = −∑
jViVjBij cos(θi − θj) , i ∈ NL
2n + m equations in variables θ ∈ Tn+m and VL ∈ Rn>0.
3 / 24

Why study solvability of power flow problems?
1 Because it is interesting to do so
2 Numerical methodsunderstand convergence, divergence, and initialization issues
State vector: x = (θ,V )
Newton iteration:
xk+1 = xk − J(θk ,V k)−1f (xk)
[Deng et al.]
3 Optimal power flow
4 Transient stability
4 / 24

Why study solvability of power flow problems?
1 Because it is interesting to do so
2 Numerical methodsunderstand convergence, divergence, and initialization issues
State vector: x = (θ,V )
Newton iteration:
xk+1 = xk − J(θk ,V k)−1f (xk)
[Deng et al.]
3 Optimal power flow
4 Transient stability
4 / 24

Why study solvability of power flow problems?
1 Because it is interesting to do so
2 Numerical methodsunderstand convergence, divergence, and initialization issues
State vector: x = (θ,V )
Newton iteration:
xk+1 = xk − J(θk ,V k)−1f (xk)
[Deng et al.]
3 Optimal power flow
4 Transient stability
4 / 24

Why study solvability of power flow problems?
1 Because it is interesting to do so
2 Numerical methodsunderstand convergence, divergence, and initialization issues
State vector: x = (θ,V )
Newton iteration:
xk+1 = xk − J(θk ,V k)−1f (xk)
[Deng et al.]
3 Optimal power flow
4 Transient stability
4 / 24

Why study solvability of power flow problems?
1 Because it is interesting to do so
2 Numerical methodsunderstand convergence, divergence, and initialization issues
State vector: x = (θ,V )
Newton iteration:
xk+1 = xk − J(θk ,V k)−1f (xk)
[Deng et al.]
3 Optimal power flow
4 Transient stability
4 / 24

Intuition on power flow solutions
1 ‘Normally’, exists unique high-voltage soln:
voltage magnitude Vi ' 1phase diff |θi − θj | << 1
[Josz et al.]
2 Lightly loaded systems: many low-voltage solutions
3 Heavily loaded systems: Fewsolutions or infeasible
saddle node bifurcationsmaximum power transfer limitnon-convex feasible set in(P,Q)-space
[Hiskens & Davy]
5 / 24

Intuition on power flow solutions
1 ‘Normally’, exists unique high-voltage soln:
voltage magnitude Vi ' 1phase diff |θi − θj | << 1
[Josz et al.]
2 Lightly loaded systems: many low-voltage solutions
3 Heavily loaded systems: Fewsolutions or infeasible
saddle node bifurcationsmaximum power transfer limitnon-convex feasible set in(P,Q)-space
[Hiskens & Davy]
5 / 24

Intuition on power flow solutions
1 ‘Normally’, exists unique high-voltage soln:
voltage magnitude Vi ' 1phase diff |θi − θj | << 1
[Josz et al.]
2 Lightly loaded systems: many low-voltage solutions
3 Heavily loaded systems: Fewsolutions or infeasible
saddle node bifurcationsmaximum power transfer limitnon-convex feasible set in(P,Q)-space
[Hiskens & Davy]
5 / 24

Mysteries of power flow
Given data: network topology, impedances, generation & loads
Q: ∃ “stable high-voltage” solution? unique? properties?
Partial answers from 45+ years of literature:
Jacobian singularity [Weedy ’67]
Multiple dynamically stable solutions [Korsak ’72]
Existence conditions [Wu & Kumagai ’80, ’82]
Active power flow singularity [Araposthatis, Sastry & Varaiya, ’81]
Counting # of solutions [Baillieul and Byrnes ’82]
Properties of quadratic equations [Makarov, Hill & Hiskens ’00]
Optimization approaches [Canizares ’98], [Dvijotham, Low, Chertkov ’15], [Molzahn]
Existence/uniqueness for active power flow [Dorfler, Chertkov & Bullo ’12, Delabays,Coletta, and Jacquod ’17, JWSP ’17, Jafarpour and Bullo ’18]
Existence/uniqueness for reactive power flow [JWSP, Dorfler & Bullo ’15]
Existence/uniqueness in distribution networks [Bolognani & Zampieri ’16, Nguyen et al.’17, Wang et al. ’17, Bazrafshan et al. ’17, . . . ]
Existence/uniqueness for active power flow [Dorfler, Chertkov & Bullo, PNAS ’12]
Existence/uniqueness for reactive power flow [JWSP, Dorfler & Bullo, NatComms ’15]
6 / 24

Mysteries of power flow
Given data: network topology, impedances, generation & loads
Q: ∃ “stable high-voltage” solution? unique? properties?
Partial answers from 45+ years of literature:
Jacobian singularity [Weedy ’67]
Multiple dynamically stable solutions [Korsak ’72]
Existence conditions [Wu & Kumagai ’80, ’82]
Active power flow singularity [Araposthatis, Sastry & Varaiya, ’81]
Counting # of solutions [Baillieul and Byrnes ’82]
Properties of quadratic equations [Makarov, Hill & Hiskens ’00]
Optimization approaches [Canizares ’98], [Dvijotham, Low, Chertkov ’15], [Molzahn]
Existence/uniqueness for active power flow [Dorfler, Chertkov & Bullo ’12, Delabays,Coletta, and Jacquod ’17, JWSP ’17, Jafarpour and Bullo ’18]
Existence/uniqueness for reactive power flow [JWSP, Dorfler & Bullo ’15]
Existence/uniqueness in distribution networks [Bolognani & Zampieri ’16, Nguyen et al.’17, Wang et al. ’17, Bazrafshan et al. ’17, . . . ]
Existence/uniqueness for active power flow [Dorfler, Chertkov & Bullo, PNAS ’12]
Existence/uniqueness for reactive power flow [JWSP, Dorfler & Bullo, NatComms ’15]
6 / 24

Mysteries of power flow
Given data: network topology, impedances, generation & loads
Q: ∃ “stable high-voltage” solution? unique? properties?
Partial answers from 45+ years of literature:
Main insight: stiffness vs. loading
1 Stiff network + light loading ⇒ feasible
2 Weak network + heavy loading ⇒ infeasible
Q: How to quantify networkstiffness vs. loading?
6 / 24

Mysteries of power flow
Given data: network topology, impedances, generation & loads
Q: ∃ “stable high-voltage” solution? unique? properties?
Partial answers from 45+ years of literature:
Main insight: stiffness vs. loading
1 Stiff network + light loading ⇒ feasible
2 Weak network + heavy loading ⇒ infeasible
Q: How to quantify networkstiffness vs. loading?
6 / 24

Solution of Two-Bus System
PL = bVGVL sin(−η)
PG = bVGVL sin(η)
QL = bV 2L − bVLVG cos(η)
7 / 24

Solution of Two-Bus System
p = bVGVL sin(η)
QL = bV 2L − bVLVG cos(η)
1 Change Variables
v :=VL
VGΓ :=
p
bV 2G
∆ :=QL
−14bV
2G
2 Square equations, add, and solve quadratic in v2
v± =
√1
2
(1− ∆
2±√
1− (4Γ2 + ∆)
)3 Nec. & Suff. Condition
4Γ2 + ∆ < 1
8 / 24

Solution of Two-Bus System
p = bVGVL sin(η)
QL = bV 2L − bVLVG cos(η)
1 Change Variables
v :=VL
VGΓ :=
p
bV 2G
∆ :=QL
−14bV
2G
2 Square equations, add, and solve quadratic in v2
v± =
√1
2
(1− ∆
2±√
1− (4Γ2 + ∆)
)3 Nec. & Suff. Condition
4Γ2 + ∆ < 1
8 / 24

Solution of Two-Bus System
p = bVGVL sin(η)
QL = bV 2L − bVLVG cos(η)
1 Change Variables
v :=VL
VGΓ :=
p
bV 2G
∆ :=QL
−14bV
2G
2 Square equations, add, and solve quadratic in v2
v± =
√1
2
(1− ∆
2±√
1− (4Γ2 + ∆)
)3 Nec. & Suff. Condition
4Γ2 + ∆ < 1
8 / 24

Solution of Two-Bus System
Γ = v sin(η)
∆ = −4v2 + 4v cos(η)
v :=VL
VGΓ :=
p
bV 2G
∆ :=QL
−14bV
2G
4Γ2 + ∆ < 1
1 High-voltage solutionv+ ∈ [ 1
2 , 1)
2 Low-voltage solutionv− ∈ [0, 1√
2)
Angle: sin(η∓) = Γ/v±1 Small-angle solutionη− ∈ [0, π/4)
2 Large-angle solutionη+ ∈ [0, π/2)
9 / 24

Solution of Two-Bus System
Γ = v sin(η)
∆ = −4v2 + 4v cos(η)
v :=VL
VGΓ :=
p
bV 2G
∆ :=QL
−14bV
2G
4Γ2 + ∆ < 1
1 High-voltage solutionv+ ∈ [ 1
2 , 1)
2 Low-voltage solutionv− ∈ [0, 1√
2)
Angle: sin(η∓) = Γ/v±1 Small-angle solutionη− ∈ [0, π/4)
2 Large-angle solutionη+ ∈ [0, π/2)
9 / 24

Solution of Two-Bus System
Γ = v sin(η)
∆ = −4v2 + 4v cos(η)
v :=VL
VGΓ :=
p
bV 2G
∆ :=QL
−14bV
2G
4Γ2 + ∆ < 1
1 High-voltage solutionv+ ∈ [ 1
2 , 1)
2 Low-voltage solutionv− ∈ [0, 1√
2)
Angle: sin(η∓) = Γ/v±1 Small-angle solutionη− ∈ [0, π/4)
2 Large-angle solutionη+ ∈ [0, π/2)
9 / 24

Solution of Two-Bus System
Γ = v sin(η)
∆ = −4v2 + 4v cos(η)
v :=VL
VGΓ :=
p
bV 2G
∆ :=QL
−14bV
2G
4Γ2 + ∆ < 1
1 High-voltage solutionv+ ∈ [ 1
2 , 1)
2 Low-voltage solutionv− ∈ [0, 1√
2)
Angle: sin(η∓) = Γ/v±1 Small-angle solutionη− ∈ [0, π/4)
2 Large-angle solutionη+ ∈ [0, π/2)
9 / 24

Solution of Two-Bus System
Γ = v sin(η)
∆ = −4v2 + 4v cos(η)
v :=VL
VGΓ :=
p
bV 2G
∆ :=QL
−14bV
2G
4Γ2 + ∆ < 1
1 High-voltage solutionv+ ∈ [ 1
2 , 1)
2 Low-voltage solutionv− ∈ [0, 1√
2)
Angle: sin(η∓) = Γ/v±1 Small-angle solutionη− ∈ [0, π/4)
2 Large-angle solutionη+ ∈ [0, π/2)
9 / 24

Solution of Two-Bus System IV
Squaring and adding equations does not generalize to networks.
Is there any hope then?
Γ = v sin(η)
∆ = −4v2 + 4v cos(η)
Use cos(η) =√
1− sin2(η) =⇒ ∆ = −4v2 + 4v√
1− (Γ/v)2
Rearrange to get fixed-point equation
v = f (v) := −1
4
∆
v+
√1−
(Γ
v
)2
This generalizes!
10 / 24

Solution of Two-Bus System IV
Squaring and adding equations does not generalize to networks.
Is there any hope then?
Γ = v sin(η)
∆ = −4v2 + 4v cos(η)
Use cos(η) =√
1− sin2(η) =⇒ ∆ = −4v2 + 4v√
1− (Γ/v)2
Rearrange to get fixed-point equation
v = f (v) := −1
4
∆
v+
√1−
(Γ
v
)2
This generalizes!
10 / 24

Solution of Two-Bus System IV
Squaring and adding equations does not generalize to networks.
Is there any hope then?
Γ = v sin(η)
∆ = −4v2 + 4v cos(η)
Use cos(η) =√
1− sin2(η) =⇒ ∆ = −4v2 + 4v√
1− (Γ/v)2
Rearrange to get fixed-point equation
v = f (v) := −1
4
∆
v+
√1−
(Γ
v
)2
This generalizes!
10 / 24

Solution of Two-Bus System IV
Squaring and adding equations does not generalize to networks.
Is there any hope then?
Γ = v sin(η)
∆ = −4v2 + 4v cos(η)
Use cos(η) =√
1− sin2(η) =⇒ ∆ = −4v2 + 4v√
1− (Γ/v)2
Rearrange to get fixed-point equation
v = f (v) := −1
4
∆
v+
√1−
(Γ
v
)2
This generalizes!
10 / 24

Network Notation I: Branches Between Bus Types
Power Flow Equations
Pi =∑
jViVjBij sin(θi − θj) , i ∈ NL ∪NG
Qi = −∑
jViVjBij cos(θi − θj) , i ∈ NL
Bus partitioning N = NL ∪NG induces branch partitioning
E = E`` ∪ Eg` ∪ Egg , A =
(AL
AG
)=
(A``L Ag`
L 0
0 Ag`G Agg
G
).
11 / 24

Network Notation I: Branches Between Bus Types
Power Flow Equations
Pi =∑
jViVjBij sin(θi − θj) , i ∈ NL ∪NG
Qi = −∑
jViVjBij cos(θi − θj) , i ∈ NL
Bus partitioning N = NL ∪NG induces branch partitioning
E = E`` ∪ Eg` ∪ Egg , A =
(AL
AG
)=
(A``L Ag`
L 0
0 Ag`G Agg
G
).
11 / 24

Network Notation I: Branches Between Bus Types
Power Flow Equations
Pi =∑
jViVjBij sin(θi − θj) , i ∈ NL ∪NG
Qi = −∑
jViVjBij cos(θi − θj) , i ∈ NL
Bus partitioning N = NL ∪NG induces branch partitioning
E = E`` ∪ Eg` ∪ Egg , A =
(AL
AG
)=
(A``L Ag`
L 0
0 Ag`G Agg
G
).
11 / 24

Network Notation I: Branches Between Bus Types
Power Flow Equations
Pi =∑
jViVjBij sin(θi − θj) , i ∈ NL ∪NG
Qi = −∑
jViVjBij cos(θi − θj) , i ∈ NL
Bus partitioning N = NL ∪NG induces branch partitioning
E = E`` ∪ Eg` ∪ Egg , A =
(AL
AG
)=
(A``L Ag`
L 0
0 Ag`G Agg
G
).
11 / 24

Network Notation II: Open-Circuit Voltages
Power Flow Equations
Pi =∑
jViVjBij sin(θi − θj) , i ∈ NL ∪NG
Qi = −∑
jViVjBij cos(θi − θj) , i ∈ NL
Generators NG : Vi fixed
Loads NL: Vi free
Partitioned Variables
V =
(VL
VG
), B =
(BLL BLG
BGL BGG
)
Open-circuit voltages
V ∗L , −B−1LL BLG︸ ︷︷ ︸
Generators→Loads
·VG
Scaled voltages
vi , Vi/V∗i
12 / 24

Network Notation II: Open-Circuit Voltages
Power Flow Equations
Pi =∑
jViVjBij sin(θi − θj) , i ∈ NL ∪NG
Qi = −∑
jViVjBij cos(θi − θj) , i ∈ NL
Generators NG : Vi fixed
Loads NL: Vi free
Partitioned Variables
V =
(VL
VG
), B =
(BLL BLG
BGL BGG
)
Open-circuit voltages
V ∗L , −B−1LL BLG︸ ︷︷ ︸
Generators→Loads
·VG
Scaled voltages
vi , Vi/V∗i
12 / 24

Network Notation II: Open-Circuit Voltages
Power Flow Equations
Pi =∑
jViVjBij sin(θi − θj) , i ∈ NL ∪NG
Qi = −∑
jViVjBij cos(θi − θj) , i ∈ NL
Generators NG : Vi fixed
Loads NL: Vi free
Partitioned Variables
V =
(VL
VG
), B =
(BLL BLG
BGL BGG
)
Open-circuit voltages
V ∗L , −B−1LL BLG︸ ︷︷ ︸
Generators→Loads
·VG
Scaled voltages
vi , Vi/V∗i
12 / 24

Network Notation II: Open-Circuit Voltages
Power Flow Equations
Pi =∑
jViVjBij sin(θi − θj) , i ∈ NL ∪NG
Qi = −∑
jViVjBij cos(θi − θj) , i ∈ NL
Generators NG : Vi fixed
Loads NL: Vi free
Partitioned Variables
V =
(VL
VG
), B =
(BLL BLG
BGL BGG
)
Open-circuit voltages
V ∗L , −B−1LL BLG︸ ︷︷ ︸
Generators→Loads
·VG
Scaled voltages
vi , Vi/V∗i
12 / 24

Network Notation III: Stiffness Matrices
V =
(VL
VG
), B =
(BLL BLG
BGL BGG
), V ∗L = −B−1
LL BLGVG
Need to non-dimensionalize power flow equations
Stiffness matrices quantify grid strength in units of power
1 Nodal stiffness matrix S ,1
4[V ∗L ] · BLL · [V ∗L ]
2 Branch stiffness matrix D , [V ∗i V∗j Bij ](i ,j)∈E
3 Laplacian stiffness matrix L , ADAT
13 / 24

Network Notation III: Stiffness Matrices
V =
(VL
VG
), B =
(BLL BLG
BGL BGG
), V ∗L = −B−1
LL BLGVG
Need to non-dimensionalize power flow equations
Stiffness matrices quantify grid strength in units of power
1 Nodal stiffness matrix S ,1
4[V ∗L ] · BLL · [V ∗L ]
2 Branch stiffness matrix D , [V ∗i V∗j Bij ](i ,j)∈E
3 Laplacian stiffness matrix L , ADAT
13 / 24

Network Notation III: Stiffness Matrices
V =
(VL
VG
), B =
(BLL BLG
BGL BGG
), V ∗L = −B−1
LL BLGVG
Need to non-dimensionalize power flow equations
Stiffness matrices quantify grid strength in units of power
1 Nodal stiffness matrix S ,1
4[V ∗L ] · BLL · [V ∗L ]
2 Branch stiffness matrix D , [V ∗i V∗j Bij ](i ,j)∈E
3 Laplacian stiffness matrix L , ADAT
13 / 24

Network Notation III: Stiffness Matrices
V =
(VL
VG
), B =
(BLL BLG
BGL BGG
), V ∗L = −B−1
LL BLGVG
Need to non-dimensionalize power flow equations
Stiffness matrices quantify grid strength in units of power
1 Nodal stiffness matrix S ,1
4[V ∗L ] · BLL · [V ∗L ]
2 Branch stiffness matrix D , [V ∗i V∗j Bij ](i ,j)∈E
3 Laplacian stiffness matrix L , ADAT
13 / 24

Network Notation III: Stiffness Matrices
V =
(VL
VG
), B =
(BLL BLG
BGL BGG
), V ∗L = −B−1
LL BLGVG
Need to non-dimensionalize power flow equations
Stiffness matrices quantify grid strength in units of power
1 Nodal stiffness matrix S ,1
4[V ∗L ] · BLL · [V ∗L ]
2 Branch stiffness matrix D , [V ∗i V∗j Bij ](i ,j)∈E
3 Laplacian stiffness matrix L , ADAT
13 / 24

Main Modeling Result
Fixed-Point Power Flow: Meshed Networks
(θ,VL) is a power flow solution iff (v , pc) solves the FPPF
v = f (v , pc) , 1n −1
4S−1[QL][v ]−11n
+1
4S−1[v ]−1|A|LD [h(v)] u(v , pc) ,
0c = CT arcsin(ψ(v , pc)) .
where
u(v , pc) , 1 −√
1 − [ψ]ψ
ψ(v , pc) = [h(v)]−1(ATL†P + D−1Cpc
),
with the phase angles ATθ = arcsin(ψ) .
14 / 24

Main Modeling Result
Fixed-Point Power Flow: Meshed Networks
(θ,VL) is a power flow solution iff (v , pc) solves the FPPF
v = f (v , pc) , 1n −1
4S−1[QL][v ]−11n
+1
4S−1[v ]−1|A|LD [h(v)] u(v , pc) ,
0c = CT arcsin(ψ(v , pc)) .
where
u(v , pc) , 1 −√
1 − [ψ]ψ
ψ(v , pc) = [h(v)]−1(ATL†P + D−1Cpc
),
with the phase angles ATθ = arcsin(ψ) .
14 / 24

Main Modeling Result
Fixed-Point Power Flow: Meshed Networks
(θ,VL) is a power flow solution iff (v , pc) solves the FPPF
v = f (v , pc) , 1n −1
4S−1[QL][v ]−11n
+1
4S−1[v ]−1|A|LD [h(v)] u(v , pc) ,
0c = CT arcsin(ψ(v , pc)) .
where
u(v , pc) , 1 −√
1 − [ψ]ψ
ψ(v , pc) = [h(v)]−1(ATL†P + D−1Cpc
),
with the phase angles ATθ = arcsin(ψ) .
14 / 24

Main Modeling Result
Fixed-Point Power Flow: Meshed Networks
(θ,VL) is a power flow solution iff (v , pc) solves the FPPF
v = f (v , pc) , 1n −1
4S−1[QL][v ]−11n
+1
4S−1[v ]−1|A|LD [h(v)] u(v , pc) ,
0c = CT arcsin(ψ(v , pc)) .
where
u(v , pc) , 1 −√
1 − [ψ]ψ
ψ(v , pc) = [h(v)]−1(ATL†P + D−1Cpc
),
with the phase angles ATθ = arcsin(ψ) .
14 / 24

Main Modeling Result
Fixed-Point Power Flow: Meshed Networks
(θ,VL) is a power flow solution iff (v , pc) solves the FPPF
v = f (v , pc) , 1n −1
4S−1[QL][v ]−11n
+1
4S−1[v ]−1|A|LD [h(v)] u(v , pc) ,
0c = CT arcsin(ψ(v , pc)) .
where
u(v , pc) , 1 −√
1 − [ψ]ψ
ψ(v , pc) = [h(v)]−1(ATL†P + D−1Cpc
),
with the phase angles ATθ = arcsin(ψ) .
14 / 24

Main Modeling Result
Fixed-Point Power Flow: Meshed Networks
(θ,VL) is a power flow solution iff (v , pc) solves the FPPF
v = f (v , pc) , 1n −1
4S−1[QL][v ]−11n
+1
4S−1[v ]−1|A|LD [h(v)] u(v , pc) ,
0c = CT arcsin(ψ(v , pc)) .
where
u(v , pc) , 1 −√
1 − [ψ]ψ
ψ(v , pc) = [h(v)]−1(ATL†P + D−1Cpc
),
with the phase angles ATθ = arcsin(ψ) .
14 / 24

Main Modeling Result
Fixed-Point Power Flow: Meshed Networks
(θ,VL) is a power flow solution iff (v , pc) solves the FPPF
v = f (v , pc) , 1n −1
4S−1[QL][v ]−11n
+1
4S−1[v ]−1|A|LD [h(v)] u(v , pc) ,
0c = CT arcsin(ψ(v , pc)) .
where
u(v , pc) , 1 −√
1 − [ψ]ψ
ψ(v , pc) = [h(v)]−1(ATL†P + D−1Cpc
),
with the phase angles ATθ = arcsin(ψ) .
14 / 24

Main Modeling Result
Fixed-Point Power Flow: Meshed Networks
(θ,VL) is a power flow solution iff (v , pc) solves the FPPF
v = f (v , pc) , 1n −1
4S−1[QL][v ]−11n
+1
4S−1[v ]−1|A|LD [h(v)] u(v , pc) ,
0c = CT arcsin(ψ(v , pc)) .
where
u(v , pc) , 1 −√
1 − [ψ]ψ
ψ(v , pc) = [h(v)]−1(ATL†P + D−1Cpc
),
with the phase angles ATθ = arcsin(ψ) .
14 / 24

New Approximate Power Flow Solution
The model says v = f (v , pc), and sin(ATθ) = ψ(v , pc).
By construction, when P = QL = 0, a solution is
v = 1n, pc = 0c , ATθ = 0|E| .
Taylor expand FPPF model around this solution
ATθapprox = ATL†P
vapprox ' 1n −1
4S−1QL +
1
8S−1|A|LD[ATL†P]ATL†P
pc,approx = 0
15 / 24

New Approximate Power Flow Solution
The model says v = f (v , pc), and sin(ATθ) = ψ(v , pc).
By construction, when P = QL = 0, a solution is
v = 1n, pc = 0c , ATθ = 0|E| .
Taylor expand FPPF model around this solution
ATθapprox = ATL†P
vapprox ' 1n −1
4S−1QL +
1
8S−1|A|LD[ATL†P]ATL†P
pc,approx = 0
15 / 24

New Approximate Power Flow Solution
The model says v = f (v , pc), and sin(ATθ) = ψ(v , pc).
By construction, when P = QL = 0, a solution is
v = 1n, pc = 0c , ATθ = 0|E| .
Taylor expand FPPF model around this solution
ATθapprox = ATL†P
vapprox ' 1n −1
4S−1QL +
1
8S−1|A|LD[ATL†P]ATL†P
pc,approx = 0
15 / 24

New Approximate Power Flow Solution
The model says v = f (v , pc), and sin(ATθ) = ψ(v , pc).
By construction, when P = QL = 0, a solution is
v = 1n, pc = 0c , ATθ = 0|E| .
Taylor expand FPPF model around this solution
ATθapprox = ATL†P
vapprox ' 1n −1
4S−1QL +
1
8S−1|A|LD[ATL†P]ATL†P
pc,approx = 0
15 / 24

New Approximate Power Flow Solution
ATθapprox = ATL†P
vapprox ' 1n −1
4S−1QL +
1
8S−1|A|LD[ATL†P]ATL†P
15 / 24

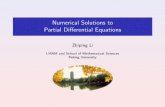
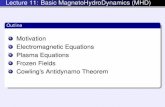
New Approximate Power Flow Solution
ATθapprox = ATL†P
vapprox ' 1n −1
4S−1QL +
1
8S−1|A|LD[ATL†P]ATL†P
0 5 10 15 20 25 300.98
1
1.02
1.04
1.06
1.08
1.1
Bus Number
VoltageMagnitude(p
.u.)
MATPOWERFPPF Iterat ionApprox. Soln.
Student Version of MATLAB
15 / 24

Numerical Results I
δmax = ‖v − vapprox‖∞ , δavg =1
n‖v − vapprox‖1
Base Load High Load
Test CaseFPPF δmax δavg FPPF δmax
Iters. (p.u.) (p.u.) Iters. (p.u.)
New England 39 4 0.006 0.004 8 0.08657 bus system 5 0.011 0.003 8 0.118RTS ’96 (3 area) 4 0.003 0.001 8 0.084118 bus system 3 0.001 0.000 7 0.054300 bus system 6 0.022 0.004 8 0.059PEGASE 1,354 5 0.011 0.001 8 0.070Polish 2,383 wp 4 0.003 0.000 8 0.078PEGASE 2,869 5 0.015 0.002 8 0.098PEGASE 9,241 6 0.063 0.003 9 0.133
16 / 24

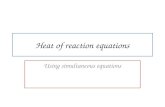
Numerical Results II – Convergence Rates
IEEE 300 bus system under heavy loading
0 5 10 15 20 25 30 35 40 4510
-14
10-12
10-10
10-8
10-6
10-4
10-2
100
17 / 24

Numerical Results III – Sensitivity to Initialization
perturb voltage magnitude initialization randomly
IEEE 118 bus system, base case
IC Spread (α) NR FDLF FPPF
0.05 0.98 0.98 1.000.10 0.53 0.53 1.000.15 0.18 0.18 1.000.2 0.03 0.03 1.000.3 0.00 0.00 1.000.5 0.00 0.00 1.000.7 0.00 0.00 0.990.9 0.00 0.00 0.99
extreme insensitivity to initialization (contraction)
18 / 24

FPPF Simplifies for Acyclic Networks
Fixed-Point Power Flow: Radial Networks
(θ,VL) is a power flow solution iff v is a fixed point of
f (v) , 1n −1
4S−1[QL][v ]−11n +
1
4S−1[v ]−1|A|LD [h(v)] u(v) ,
where
u(v) , 1 −√
1 − [ψ]ψ
ψ(v) = [h(v)]−1D−1p
p = (ATA)−1ATP
with the phase angles ATθ = arcsin(ψ) .
On what invariant set is f a contraction?
19 / 24

FPPF Simplifies for Acyclic Networks
Fixed-Point Power Flow: Radial Networks
(θ,VL) is a power flow solution iff v is a fixed point of
f (v) , 1n −1
4S−1[QL][v ]−11n +
1
4S−1[v ]−1|A|LD [h(v)] u(v) ,
where
u(v) , 1 −√
1 − [ψ]ψ
ψ(v) = [h(v)]−1D−1p
p = (ATA)−1ATP
with the phase angles ATθ = arcsin(ψ) .
On what invariant set is f a contraction?
19 / 24

FPPF Simplifies for Acyclic Networks
Fixed-Point Power Flow: Radial Networks
(θ,VL) is a power flow solution iff v is a fixed point of
f (v) , 1n −1
4S−1[QL][v ]−11n +
1
4S−1[v ]−1|A|LD [h(v)] u(v) ,
where
u(v) , 1 −√
1 − [ψ]ψ
ψ(v) = [h(v)]−1D−1p
p = (ATA)−1ATP
with the phase angles ATθ = arcsin(ψ) .
On what invariant set is f a contraction?
19 / 24

FPPF Simplifies for Acyclic Networks
Fixed-Point Power Flow: Radial Networks
(θ,VL) is a power flow solution iff v is a fixed point of
f (v) , 1n −1
4S−1[QL][v ]−11n +
1
4S−1[v ]−1|A|LD [h(v)] u(v) ,
where
u(v) , 1 −√
1 − [ψ]ψ
ψ(v) = [h(v)]−1D−1p
p = (ATA)−1ATP
with the phase angles ATθ = arcsin(ψ) .
On what invariant set is f a contraction?
19 / 24

FPPF Simplifies for Acyclic Networks
Fixed-Point Power Flow: Radial Networks
(θ,VL) is a power flow solution iff v is a fixed point of
f (v) , 1n −1
4S−1[QL][v ]−11n +
1
4S−1[v ]−1|A|LD [h(v)] u(v) ,
where
u(v) , 1 −√
1 − [ψ]ψ
ψ(v) = [h(v)]−1D−1p
p = (ATA)−1ATP
with the phase angles ATθ = arcsin(ψ) .
On what invariant set is f a contraction?
19 / 24

FPPF Simplifies for Acyclic Networks
Fixed-Point Power Flow: Radial Networks
(θ,VL) is a power flow solution iff v is a fixed point of
f (v) , 1n −1
4S−1[QL][v ]−11n +
1
4S−1[v ]−1|A|LD [h(v)] u(v) ,
where
u(v) , 1 −√
1 − [ψ]ψ
ψ(v) = [h(v)]−1D−1p
p = (ATA)−1ATP
with the phase angles ATθ = arcsin(ψ) .
On what invariant set is f a contraction?
19 / 24

FPPF Simplifies for Acyclic Networks
Fixed-Point Power Flow: Radial Networks
(θ,VL) is a power flow solution iff v is a fixed point of
f (v) , 1n −1
4S−1[QL][v ]−11n +
1
4S−1[v ]−1|A|LD [h(v)] u(v) ,
where
u(v) , 1 −√
1 − [ψ]ψ
ψ(v) = [h(v)]−1D−1p
p = (ATA)−1ATP
with the phase angles ATθ = arcsin(ψ) .
On what invariant set is f a contraction?
19 / 24

FPPF Simplifies for Acyclic Networks
Fixed-Point Power Flow: Radial Networks
(θ,VL) is a power flow solution iff v is a fixed point of
f (v) , 1n −1
4S−1[QL][v ]−11n +
1
4S−1[v ]−1|A|LD [h(v)] u(v) ,
where
u(v) , 1 −√
1 − [ψ]ψ
ψ(v) = [h(v)]−1D−1p
p = (ATA)−1ATP
with the phase angles ATθ = arcsin(ψ) .
On what invariant set is f a contraction?
19 / 24

Solvability Results for Different Acyclic Topologies
PQ buses have one PV bus neighbor
Sufficient + NecessaryExistence + Uniqueness
PQ buses have many PV bus neighbors
Sufficient + TightExistence + Uniqueness
General interconnections
SufficientExistence
20 / 24

Solvability Results for Different Acyclic Topologies
PQ buses have one PV bus neighbor
Sufficient + NecessaryExistence + Uniqueness
PQ buses have many PV bus neighbors
Sufficient + TightExistence + Uniqueness
General interconnections
SufficientExistence
20 / 24

Solvability Results for Different Acyclic Topologies
PQ buses have one PV bus neighbor
Sufficient + NecessaryExistence + Uniqueness
PQ buses have many PV bus neighbors
Sufficient + TightExistence + Uniqueness
General interconnections
SufficientExistence
20 / 24

Solvability Results for Different Acyclic Topologies
PQ buses have one PV bus neighbor
Sufficient + NecessaryExistence + Uniqueness
PQ buses have many PV bus neighbors
Sufficient + TightExistence + Uniqueness
General interconnections
SufficientExistence
20 / 24

Partitioning of Voltage Space
maxi∈NL
∆i + 4Γ2i < 1
max(i ,j)∈Egg
Γij < 1 ,
vi,± ,
√1
2
(1−
∆i
2±√
1− (∆i + 4Γ2i )
)
v2i ,+ − v2
i ,− =√
1− (∆i + 4Γ2i ) .
21 / 24

Partitioning of Voltage Space
maxi∈NL
∆i + 4Γ2i < 1
max(i ,j)∈Egg
Γij < 1 ,
vi,± ,
√1
2
(1−
∆i
2±√
1− (∆i + 4Γ2i )
)
v2i ,+ − v2
i ,− =√
1− (∆i + 4Γ2i ) .
21 / 24

Partitioning of Voltage Space
maxi∈NL
∆i + 4Γ2i < 1
max(i ,j)∈Egg
Γij < 1 ,
vi,± ,
√1
2
(1−
∆i
2±√
1− (∆i + 4Γ2i )
)
v2i ,+ − v2
i ,− =√
1− (∆i + 4Γ2i ) .
21 / 24

Partitioning of Voltage Space
maxi∈NL
∆i + 4Γ2i < 1
max(i ,j)∈Egg
Γij < 1 ,
vi,± ,
√1
2
(1−
∆i
2±√
1− (∆i + 4Γ2i )
)
v2i ,+ − v2
i ,− =√
1− (∆i + 4Γ2i ) .
21 / 24

Partitioning of Voltage Space
maxi∈NL
∆i + 4Γ2i < 1
max(i ,j)∈Egg
Γij < 1 ,
vi,± ,
√1
2
(1−
∆i
2±√
1− (∆i + 4Γ2i )
)
v2i ,+ − v2
i ,− =√
1− (∆i + 4Γ2i ) .
21 / 24

Partitioning of Voltage Space
maxi∈NL
∆i + 4Γ2i < 1
max(i ,j)∈Egg
Γij < 1 ,
vi,± ,
√1
2
(1−
∆i
2±√
1− (∆i + 4Γ2i )
)
v2i ,+ − v2
i ,− =√
1− (∆i + 4Γ2i ) .
21 / 24

Partitioning of Voltage Space
maxi∈NL
∆i + 4Γ2i < 1
max(i ,j)∈Egg
Γij < 1 ,
vi,± ,
√1
2
(1−
∆i
2±√
1− (∆i + 4Γ2i )
)
v2i ,+ − v2
i ,− =√
1− (∆i + 4Γ2i ) .
21 / 24

Partitioning of Voltage Space
maxi∈NL
∆i + 4Γ2i < 1
max(i ,j)∈Egg
Γij < 1 ,
vi,± ,
√1
2
(1−
∆i
2±√
1− (∆i + 4Γ2i )
)
v2i ,+ − v2
i ,− =√
1− (∆i + 4Γ2i ) .
21 / 24

Partitioning of Voltage Space
maxi∈NL
∆i + 4Γ2i < 1
max(i ,j)∈Egg
Γij < 1 ,
vi,± ,
√1
2
(1−
∆i
2±√
1− (∆i + 4Γ2i )
)
v2i ,+ − v2
i ,− =√
1− (∆i + 4Γ2i ) .
21 / 24

ConclusionsFramework for studying Lossless Power Flow:
1 Fixed-Point Power Flow
2 Approximate solution
SUBMITTED FOR PUBLICATION. THIS VERSION: JANUARY 14, 2017 1
A Theory of Solvability for Lossless Power FlowEquations — Part I: Fixed-Point Power Flow
John W. Simpson-Porco, Member, IEEE
Abstract—This two-part paper details a theory of solvabilityfor the power flow equations in lossless power networks. InPart I, we derive a new formulation of the lossless powerflow equations, which we term the fixed-point power flow. Themodel is stated for both meshed and radial networks, and isparameterized by several graph-theoretic matrices – the powernetwork stiffness matrices – which quantify the internal couplingstrength of the network. The model leads immediately to anexplicit approximation of the high-voltage power flow solution.For standard test cases, we find that iterates of the fixed-point power flow converge rapidly to the high-voltage powerflow solution, with the approximate solution yielding accuratepredictions near base case loading. In Part II, we leverage thefixed-point power flow to study power flow solvability, and forradial networks we derive conditions guaranteeing the existenceand uniqueness of a high-voltage power flow solution. Theseconditions (i) imply exponential convergence of the fixed-pointpower flow iteration, and (ii) properly generalize the textbooktwo-bus system results.
Index Terms—Power flow equations, complex networks, powersystems, circuit theory, optimal power flow, fixed point theorems.
I . I N T R O D U C T I O N
1) Update DCPF with PQ term.2) y has units of power. Amount of active power associated
with each cycle? Maybe use pc instead of y
The power flow equations describe the balance and flow ofpower in a synchronous AC power system. The solutions ofthese equations (also called operating points of the network)describe the configurations of voltages and currents which(i) are physically consistent with Kichhoff’s and Ohm’s laws,and (ii) meet the prescribed boundary conditions, specifiedin terms of fixed power injections or fixed voltage levels atparticular nodes in the network. Knowledge of the currentsystem operating point is crucial, as is understanding how thecurrent operating point will change as control actions are takenor as unexpected contingencies occur. As such, the powerflow equations are embedded in nearly every power systemanalysis or control problem, including optimal power flow andits security-constrained variants, transient and voltage stabilityassessment, contingency screening, short-circuit analysis, andwide-area monitoring/control [1].
As the equations are nonlinear, the existence of real-valuedsolutions is not guaranteed: lightly loaded networks typicallypossess many solutions [2], while a network which is loadedsufficiently will possess none. Despite this potential for bothmultiple reasonable solutions and infeasibility, typically there
J. W. Simpson-Porco is with the Department of Electrical and ComputerEngineering, University of Waterloo. Email: [email protected].
is a single desirable solution, characterized by high voltagemagnitudes at buses and small inter-bus current flows. Thissolution is often termed stable, as it behaves in a mannerconsistent with the intuition of operators, and moreover, isa locally exponentially stable equilibrium point for somesimplified dynamic grid models [3], [4]. The ability to ac-curately and consistently calculate this high-voltage solution isincredibly important, and fairly reliable numerical techniquesare available for this purpose [2], [5], [6]. While our results havecomputational implications, our main interest and motivationis the question of power flow feasibility/solvability: for whatclasses of networks and loading scenarios can we guaranteethat the power flow equations are solvable for a useful solution,and what can be rigorously said about this solution?
Aside from intellectual merit, there are at least two importantengineering motivations for understanding solvability. The firstis to better understand the convergence of iterative numericalalgorithms for solving power flow equations. When a powerflow solver diverges, it may be because of a numerical instabil-ity in the algorithm, an initialization issue [7], [8], or it may bebecause no power flow solution exists to be found [9]. Withouta coherent theory of power flow solvability, it is difficult todistinguish between these cases. Our proposed algorithm fromPart I combined with the theoretical results in Part II willprovide a certificate to rule out the second and third cases.
The second motivation comes from the desire to operatepower systems safely yet non-conservatively. Due to the largecapital costs of transmission infrastructure investment, systemoperators are incentivized to operate power networks close totheir maximum power transfer limits. The present work is anadditional step towards characterizing these nonlinear transferlimits, and understanding in a precise mathematical way howthe transfer limits depend on the internal structure of the grid. Inthis context, our results in Part II provide a topology-dependentloading margin for the grid. This loading margin can serve asa solvability certificate, or as a lower bound on the distanceto the maximum power transfer boundary.
A. Contributions of Part I and Preview of Part II Results
This two-part paper presents a new model of power flow inlossless networks, and then leverages this model to obtain (i)a new iterative power flow algorithm, (ii) an approximationof the high-voltage solution, and (iii) new theoretical resultson power flow solvability. Our new model is inspired by theway that phase angles are eliminated in the standard textbookanalysis of the two-bus PV-PQ power system [10, Chapter 2].We begin with the lossless power flow equations in polar form,
New conditions for power flow solvability:
3 Contractive iteration
4 Existence/uniqueness
5 Generalizes known results
SUBMITTED FOR PUBLICATION. THIS VERSION: JANUARY 17, 2017 1
A Theory of Solvability for Lossless Power FlowEquations — Part II: Existence and Uniqueness
John W. Simpson-Porco, Member, IEEE
Abstract—This two-part paper details a theory of solvabilityfor the power flow equations in lossless power networks. InPart I, we derived a new formulation of the lossless power flowequations, which we term the fixed-point power flow. The modelis parameterized by several graph-theoretic matrices – the powernetwork stiffness matrices – which quantify the internal couplingstrength of the network. In Part II, we leverage the fixed-pointpower flow to study power flow solvability. For radial networks,we derive parametric conditions which guarantee the existenceand uniqueness of a high-voltage power flow solution, andconstruct examples for which the conditions are also necessary.Our conditions (i) imply convergence of the fixed-point powerflow iteration, (ii) unify and extend recent results on solvabilityof decoupled power flow, (iii) directly generalize the textbooktwo-bus system results, and (iv) provide new insights into howthe structure and parameters of the grid influence power flowsolvability.
Index Terms—Power flow equations, complex networks, powersystems, circuit theory, optimal power flow, fixed point theorems.
I . I N T R O D U C T I O N
1) Dib - An Explicit Solution of the Power Balance E2) Barabanov - On Existence and Stability of Equilibria of
Linear TimeInvariant Systems with Constant Power Loads3) Martinez - On Existence of Equilibria of Multi-port Linear
AC Networks with Constant-Power Loads4) Upper bound of 1 on voltages in thereom statements
In the companion paper [1], we developed a new model ofcoupled power flow for lossless networks, which we termedthe fixed-point power flow (FPPF). The name references thefact that for radial networks, the fixed-point power flow can bewritten as a vector fixed-point equation v = f(v) in the scaledvoltage magnitudes vi = Vi/V ⇤
i at PQ buses. Phase anglesare not present in the model, but are recovered directly (anduniquely) as an “output” after a voltage solution v is found.We showed through numerical experiments that the iterationvk+1 = f(vk) provides an effective means of solving the powerflow equations, converging in only a few iterations from a flatstart in both lightly and heavily loaded networks.
The reader is referred to Part I for a detailed introduction,motivation, modeling assumptions, and a complete derivationof the FPPF. We now shift our focus from modeling andcomputation to analysis, and address the following problem.
Problem 1 (Power Flow Solvability Problem): Give nec-essary and/or sufficient conditions on the active and reactive
J. W. Simpson-Porco is with the Department of Electrical and ComputerEngineering, University of Waterloo. Email: [email protected].
power injections, the generator voltage magnitudes, the networktopology, and the series/shunt admittances under which thepower flow equations possess a unique, high-voltage solution.In addition, quantify the location of the solution in voltage-space in terms of the problem data.
A. Contributions of Part IIWe leverage the FPPF developed in Part I, and for radial net-
works we derive sufficient conditions which ensure the powerflow equations possess a solution. Our conditions guarantee theexistence of a solution within a desirable set in voltage space,where voltage magnitudes are near their open-circuit values andphase angle differences between buses are small. For simplifiedtopologies containing no connections between PQ buses, wefurther show that our existence condition implies the fixed-point power flow mapping f is a contraction mapping. This inturn implies that (i) the solution is unique within the specifiedset, and (ii) the FPPF iteration vk+1 = f(vk) convergesexponentially to the unique power solution. For certain cases,we show our conditions are also necessary for existence. As abyproduct of our analysis, we also establish the non-existenceof solutions within a both a “medium-voltage” and an ”extra-high-voltage” region of voltage-space. The existence of thismedium-voltage solutionless region implies a lower bound involtage-space between the unique high-voltage solution andany undesirable low-voltage solutions.
The conditions we derive are parametric, depending only onthe given data of the power flow problem including fixed activeand reactive power injections, shunt and series susceptances, thenetwork topology, and PV bus voltage set-points. Rather thanimposing spectral or worst-case bounds individually on thesequantities, our conditions fuse the relevant parameters togetherinto intuitive loading margins for the system, by exploiting thestiffness matrices introduced in Part I [1, Def. 2]. These loadingmargins generalize the textbook two-bus network feasibilityresults [2, Chapter 2], and unify recent results on feasibilityof decoupled active [3] and reactive [4] power flow. Whileour results are currently restricted to an unrealistic class ofnetworks (lossless, radial), the analysis presented is — in theauthors opinion — the most complete one available in theliterature. The theoretical results here also provide a partialexplanation for the robust numerical behavior of the FPPFiteration observed in Part I.
B. Organization of PaperSection II presents an extensive literature review, surveying
the history of power flow solvability results, with a focus onincorporating structural information into solvability conditions.
What’s next?
1 Analysis for meshed networksunresolved
2 Lossy networks (TPWRS: JWSP ’17)
3 Applications (n − 1, opt/control)22 / 24

ConclusionsFramework for studying Lossless Power Flow:
1 Fixed-Point Power Flow
2 Approximate solution
SUBMITTED FOR PUBLICATION. THIS VERSION: JANUARY 14, 2017 1
A Theory of Solvability for Lossless Power FlowEquations — Part I: Fixed-Point Power Flow
John W. Simpson-Porco, Member, IEEE
Abstract—This two-part paper details a theory of solvabilityfor the power flow equations in lossless power networks. InPart I, we derive a new formulation of the lossless powerflow equations, which we term the fixed-point power flow. Themodel is stated for both meshed and radial networks, and isparameterized by several graph-theoretic matrices – the powernetwork stiffness matrices – which quantify the internal couplingstrength of the network. The model leads immediately to anexplicit approximation of the high-voltage power flow solution.For standard test cases, we find that iterates of the fixed-point power flow converge rapidly to the high-voltage powerflow solution, with the approximate solution yielding accuratepredictions near base case loading. In Part II, we leverage thefixed-point power flow to study power flow solvability, and forradial networks we derive conditions guaranteeing the existenceand uniqueness of a high-voltage power flow solution. Theseconditions (i) imply exponential convergence of the fixed-pointpower flow iteration, and (ii) properly generalize the textbooktwo-bus system results.
Index Terms—Power flow equations, complex networks, powersystems, circuit theory, optimal power flow, fixed point theorems.
I . I N T R O D U C T I O N
1) Update DCPF with PQ term.2) y has units of power. Amount of active power associated
with each cycle? Maybe use pc instead of y
The power flow equations describe the balance and flow ofpower in a synchronous AC power system. The solutions ofthese equations (also called operating points of the network)describe the configurations of voltages and currents which(i) are physically consistent with Kichhoff’s and Ohm’s laws,and (ii) meet the prescribed boundary conditions, specifiedin terms of fixed power injections or fixed voltage levels atparticular nodes in the network. Knowledge of the currentsystem operating point is crucial, as is understanding how thecurrent operating point will change as control actions are takenor as unexpected contingencies occur. As such, the powerflow equations are embedded in nearly every power systemanalysis or control problem, including optimal power flow andits security-constrained variants, transient and voltage stabilityassessment, contingency screening, short-circuit analysis, andwide-area monitoring/control [1].
As the equations are nonlinear, the existence of real-valuedsolutions is not guaranteed: lightly loaded networks typicallypossess many solutions [2], while a network which is loadedsufficiently will possess none. Despite this potential for bothmultiple reasonable solutions and infeasibility, typically there
J. W. Simpson-Porco is with the Department of Electrical and ComputerEngineering, University of Waterloo. Email: [email protected].
is a single desirable solution, characterized by high voltagemagnitudes at buses and small inter-bus current flows. Thissolution is often termed stable, as it behaves in a mannerconsistent with the intuition of operators, and moreover, isa locally exponentially stable equilibrium point for somesimplified dynamic grid models [3], [4]. The ability to ac-curately and consistently calculate this high-voltage solution isincredibly important, and fairly reliable numerical techniquesare available for this purpose [2], [5], [6]. While our results havecomputational implications, our main interest and motivationis the question of power flow feasibility/solvability: for whatclasses of networks and loading scenarios can we guaranteethat the power flow equations are solvable for a useful solution,and what can be rigorously said about this solution?
Aside from intellectual merit, there are at least two importantengineering motivations for understanding solvability. The firstis to better understand the convergence of iterative numericalalgorithms for solving power flow equations. When a powerflow solver diverges, it may be because of a numerical instabil-ity in the algorithm, an initialization issue [7], [8], or it may bebecause no power flow solution exists to be found [9]. Withouta coherent theory of power flow solvability, it is difficult todistinguish between these cases. Our proposed algorithm fromPart I combined with the theoretical results in Part II willprovide a certificate to rule out the second and third cases.
The second motivation comes from the desire to operatepower systems safely yet non-conservatively. Due to the largecapital costs of transmission infrastructure investment, systemoperators are incentivized to operate power networks close totheir maximum power transfer limits. The present work is anadditional step towards characterizing these nonlinear transferlimits, and understanding in a precise mathematical way howthe transfer limits depend on the internal structure of the grid. Inthis context, our results in Part II provide a topology-dependentloading margin for the grid. This loading margin can serve asa solvability certificate, or as a lower bound on the distanceto the maximum power transfer boundary.
A. Contributions of Part I and Preview of Part II Results
This two-part paper presents a new model of power flow inlossless networks, and then leverages this model to obtain (i)a new iterative power flow algorithm, (ii) an approximationof the high-voltage solution, and (iii) new theoretical resultson power flow solvability. Our new model is inspired by theway that phase angles are eliminated in the standard textbookanalysis of the two-bus PV-PQ power system [10, Chapter 2].We begin with the lossless power flow equations in polar form,
New conditions for power flow solvability:
3 Contractive iteration
4 Existence/uniqueness
5 Generalizes known results
SUBMITTED FOR PUBLICATION. THIS VERSION: JANUARY 17, 2017 1
A Theory of Solvability for Lossless Power FlowEquations — Part II: Existence and Uniqueness
John W. Simpson-Porco, Member, IEEE
Abstract—This two-part paper details a theory of solvabilityfor the power flow equations in lossless power networks. InPart I, we derived a new formulation of the lossless power flowequations, which we term the fixed-point power flow. The modelis parameterized by several graph-theoretic matrices – the powernetwork stiffness matrices – which quantify the internal couplingstrength of the network. In Part II, we leverage the fixed-pointpower flow to study power flow solvability. For radial networks,we derive parametric conditions which guarantee the existenceand uniqueness of a high-voltage power flow solution, andconstruct examples for which the conditions are also necessary.Our conditions (i) imply convergence of the fixed-point powerflow iteration, (ii) unify and extend recent results on solvabilityof decoupled power flow, (iii) directly generalize the textbooktwo-bus system results, and (iv) provide new insights into howthe structure and parameters of the grid influence power flowsolvability.
Index Terms—Power flow equations, complex networks, powersystems, circuit theory, optimal power flow, fixed point theorems.
I . I N T R O D U C T I O N
1) Dib - An Explicit Solution of the Power Balance E2) Barabanov - On Existence and Stability of Equilibria of
Linear TimeInvariant Systems with Constant Power Loads3) Martinez - On Existence of Equilibria of Multi-port Linear
AC Networks with Constant-Power Loads4) Upper bound of 1 on voltages in thereom statements
In the companion paper [1], we developed a new model ofcoupled power flow for lossless networks, which we termedthe fixed-point power flow (FPPF). The name references thefact that for radial networks, the fixed-point power flow can bewritten as a vector fixed-point equation v = f(v) in the scaledvoltage magnitudes vi = Vi/V ⇤
i at PQ buses. Phase anglesare not present in the model, but are recovered directly (anduniquely) as an “output” after a voltage solution v is found.We showed through numerical experiments that the iterationvk+1 = f(vk) provides an effective means of solving the powerflow equations, converging in only a few iterations from a flatstart in both lightly and heavily loaded networks.
The reader is referred to Part I for a detailed introduction,motivation, modeling assumptions, and a complete derivationof the FPPF. We now shift our focus from modeling andcomputation to analysis, and address the following problem.
Problem 1 (Power Flow Solvability Problem): Give nec-essary and/or sufficient conditions on the active and reactive
J. W. Simpson-Porco is with the Department of Electrical and ComputerEngineering, University of Waterloo. Email: [email protected].
power injections, the generator voltage magnitudes, the networktopology, and the series/shunt admittances under which thepower flow equations possess a unique, high-voltage solution.In addition, quantify the location of the solution in voltage-space in terms of the problem data.
A. Contributions of Part IIWe leverage the FPPF developed in Part I, and for radial net-
works we derive sufficient conditions which ensure the powerflow equations possess a solution. Our conditions guarantee theexistence of a solution within a desirable set in voltage space,where voltage magnitudes are near their open-circuit values andphase angle differences between buses are small. For simplifiedtopologies containing no connections between PQ buses, wefurther show that our existence condition implies the fixed-point power flow mapping f is a contraction mapping. This inturn implies that (i) the solution is unique within the specifiedset, and (ii) the FPPF iteration vk+1 = f(vk) convergesexponentially to the unique power solution. For certain cases,we show our conditions are also necessary for existence. As abyproduct of our analysis, we also establish the non-existenceof solutions within a both a “medium-voltage” and an ”extra-high-voltage” region of voltage-space. The existence of thismedium-voltage solutionless region implies a lower bound involtage-space between the unique high-voltage solution andany undesirable low-voltage solutions.
The conditions we derive are parametric, depending only onthe given data of the power flow problem including fixed activeand reactive power injections, shunt and series susceptances, thenetwork topology, and PV bus voltage set-points. Rather thanimposing spectral or worst-case bounds individually on thesequantities, our conditions fuse the relevant parameters togetherinto intuitive loading margins for the system, by exploiting thestiffness matrices introduced in Part I [1, Def. 2]. These loadingmargins generalize the textbook two-bus network feasibilityresults [2, Chapter 2], and unify recent results on feasibilityof decoupled active [3] and reactive [4] power flow. Whileour results are currently restricted to an unrealistic class ofnetworks (lossless, radial), the analysis presented is — in theauthors opinion — the most complete one available in theliterature. The theoretical results here also provide a partialexplanation for the robust numerical behavior of the FPPFiteration observed in Part I.
B. Organization of PaperSection II presents an extensive literature review, surveying
the history of power flow solvability results, with a focus onincorporating structural information into solvability conditions.
What’s next?
1 Analysis for meshed networksunresolved
2 Lossy networks (TPWRS: JWSP ’17)
3 Applications (n − 1, opt/control)22 / 24

ConclusionsFramework for studying Lossless Power Flow:
1 Fixed-Point Power Flow
2 Approximate solution
SUBMITTED FOR PUBLICATION. THIS VERSION: JANUARY 14, 2017 1
A Theory of Solvability for Lossless Power FlowEquations — Part I: Fixed-Point Power Flow
John W. Simpson-Porco, Member, IEEE
Abstract—This two-part paper details a theory of solvabilityfor the power flow equations in lossless power networks. InPart I, we derive a new formulation of the lossless powerflow equations, which we term the fixed-point power flow. Themodel is stated for both meshed and radial networks, and isparameterized by several graph-theoretic matrices – the powernetwork stiffness matrices – which quantify the internal couplingstrength of the network. The model leads immediately to anexplicit approximation of the high-voltage power flow solution.For standard test cases, we find that iterates of the fixed-point power flow converge rapidly to the high-voltage powerflow solution, with the approximate solution yielding accuratepredictions near base case loading. In Part II, we leverage thefixed-point power flow to study power flow solvability, and forradial networks we derive conditions guaranteeing the existenceand uniqueness of a high-voltage power flow solution. Theseconditions (i) imply exponential convergence of the fixed-pointpower flow iteration, and (ii) properly generalize the textbooktwo-bus system results.
Index Terms—Power flow equations, complex networks, powersystems, circuit theory, optimal power flow, fixed point theorems.
I . I N T R O D U C T I O N
1) Update DCPF with PQ term.2) y has units of power. Amount of active power associated
with each cycle? Maybe use pc instead of y
The power flow equations describe the balance and flow ofpower in a synchronous AC power system. The solutions ofthese equations (also called operating points of the network)describe the configurations of voltages and currents which(i) are physically consistent with Kichhoff’s and Ohm’s laws,and (ii) meet the prescribed boundary conditions, specifiedin terms of fixed power injections or fixed voltage levels atparticular nodes in the network. Knowledge of the currentsystem operating point is crucial, as is understanding how thecurrent operating point will change as control actions are takenor as unexpected contingencies occur. As such, the powerflow equations are embedded in nearly every power systemanalysis or control problem, including optimal power flow andits security-constrained variants, transient and voltage stabilityassessment, contingency screening, short-circuit analysis, andwide-area monitoring/control [1].
As the equations are nonlinear, the existence of real-valuedsolutions is not guaranteed: lightly loaded networks typicallypossess many solutions [2], while a network which is loadedsufficiently will possess none. Despite this potential for bothmultiple reasonable solutions and infeasibility, typically there
J. W. Simpson-Porco is with the Department of Electrical and ComputerEngineering, University of Waterloo. Email: [email protected].
is a single desirable solution, characterized by high voltagemagnitudes at buses and small inter-bus current flows. Thissolution is often termed stable, as it behaves in a mannerconsistent with the intuition of operators, and moreover, isa locally exponentially stable equilibrium point for somesimplified dynamic grid models [3], [4]. The ability to ac-curately and consistently calculate this high-voltage solution isincredibly important, and fairly reliable numerical techniquesare available for this purpose [2], [5], [6]. While our results havecomputational implications, our main interest and motivationis the question of power flow feasibility/solvability: for whatclasses of networks and loading scenarios can we guaranteethat the power flow equations are solvable for a useful solution,and what can be rigorously said about this solution?
Aside from intellectual merit, there are at least two importantengineering motivations for understanding solvability. The firstis to better understand the convergence of iterative numericalalgorithms for solving power flow equations. When a powerflow solver diverges, it may be because of a numerical instabil-ity in the algorithm, an initialization issue [7], [8], or it may bebecause no power flow solution exists to be found [9]. Withouta coherent theory of power flow solvability, it is difficult todistinguish between these cases. Our proposed algorithm fromPart I combined with the theoretical results in Part II willprovide a certificate to rule out the second and third cases.
The second motivation comes from the desire to operatepower systems safely yet non-conservatively. Due to the largecapital costs of transmission infrastructure investment, systemoperators are incentivized to operate power networks close totheir maximum power transfer limits. The present work is anadditional step towards characterizing these nonlinear transferlimits, and understanding in a precise mathematical way howthe transfer limits depend on the internal structure of the grid. Inthis context, our results in Part II provide a topology-dependentloading margin for the grid. This loading margin can serve asa solvability certificate, or as a lower bound on the distanceto the maximum power transfer boundary.
A. Contributions of Part I and Preview of Part II Results
This two-part paper presents a new model of power flow inlossless networks, and then leverages this model to obtain (i)a new iterative power flow algorithm, (ii) an approximationof the high-voltage solution, and (iii) new theoretical resultson power flow solvability. Our new model is inspired by theway that phase angles are eliminated in the standard textbookanalysis of the two-bus PV-PQ power system [10, Chapter 2].We begin with the lossless power flow equations in polar form,
New conditions for power flow solvability:
3 Contractive iteration
4 Existence/uniqueness
5 Generalizes known results
SUBMITTED FOR PUBLICATION. THIS VERSION: JANUARY 17, 2017 1
A Theory of Solvability for Lossless Power FlowEquations — Part II: Existence and Uniqueness
John W. Simpson-Porco, Member, IEEE
Abstract—This two-part paper details a theory of solvabilityfor the power flow equations in lossless power networks. InPart I, we derived a new formulation of the lossless power flowequations, which we term the fixed-point power flow. The modelis parameterized by several graph-theoretic matrices – the powernetwork stiffness matrices – which quantify the internal couplingstrength of the network. In Part II, we leverage the fixed-pointpower flow to study power flow solvability. For radial networks,we derive parametric conditions which guarantee the existenceand uniqueness of a high-voltage power flow solution, andconstruct examples for which the conditions are also necessary.Our conditions (i) imply convergence of the fixed-point powerflow iteration, (ii) unify and extend recent results on solvabilityof decoupled power flow, (iii) directly generalize the textbooktwo-bus system results, and (iv) provide new insights into howthe structure and parameters of the grid influence power flowsolvability.
Index Terms—Power flow equations, complex networks, powersystems, circuit theory, optimal power flow, fixed point theorems.
I . I N T R O D U C T I O N
1) Dib - An Explicit Solution of the Power Balance E2) Barabanov - On Existence and Stability of Equilibria of
Linear TimeInvariant Systems with Constant Power Loads3) Martinez - On Existence of Equilibria of Multi-port Linear
AC Networks with Constant-Power Loads4) Upper bound of 1 on voltages in thereom statements
In the companion paper [1], we developed a new model ofcoupled power flow for lossless networks, which we termedthe fixed-point power flow (FPPF). The name references thefact that for radial networks, the fixed-point power flow can bewritten as a vector fixed-point equation v = f(v) in the scaledvoltage magnitudes vi = Vi/V ⇤
i at PQ buses. Phase anglesare not present in the model, but are recovered directly (anduniquely) as an “output” after a voltage solution v is found.We showed through numerical experiments that the iterationvk+1 = f(vk) provides an effective means of solving the powerflow equations, converging in only a few iterations from a flatstart in both lightly and heavily loaded networks.
The reader is referred to Part I for a detailed introduction,motivation, modeling assumptions, and a complete derivationof the FPPF. We now shift our focus from modeling andcomputation to analysis, and address the following problem.
Problem 1 (Power Flow Solvability Problem): Give nec-essary and/or sufficient conditions on the active and reactive
J. W. Simpson-Porco is with the Department of Electrical and ComputerEngineering, University of Waterloo. Email: [email protected].
power injections, the generator voltage magnitudes, the networktopology, and the series/shunt admittances under which thepower flow equations possess a unique, high-voltage solution.In addition, quantify the location of the solution in voltage-space in terms of the problem data.
A. Contributions of Part IIWe leverage the FPPF developed in Part I, and for radial net-
works we derive sufficient conditions which ensure the powerflow equations possess a solution. Our conditions guarantee theexistence of a solution within a desirable set in voltage space,where voltage magnitudes are near their open-circuit values andphase angle differences between buses are small. For simplifiedtopologies containing no connections between PQ buses, wefurther show that our existence condition implies the fixed-point power flow mapping f is a contraction mapping. This inturn implies that (i) the solution is unique within the specifiedset, and (ii) the FPPF iteration vk+1 = f(vk) convergesexponentially to the unique power solution. For certain cases,we show our conditions are also necessary for existence. As abyproduct of our analysis, we also establish the non-existenceof solutions within a both a “medium-voltage” and an ”extra-high-voltage” region of voltage-space. The existence of thismedium-voltage solutionless region implies a lower bound involtage-space between the unique high-voltage solution andany undesirable low-voltage solutions.
The conditions we derive are parametric, depending only onthe given data of the power flow problem including fixed activeand reactive power injections, shunt and series susceptances, thenetwork topology, and PV bus voltage set-points. Rather thanimposing spectral or worst-case bounds individually on thesequantities, our conditions fuse the relevant parameters togetherinto intuitive loading margins for the system, by exploiting thestiffness matrices introduced in Part I [1, Def. 2]. These loadingmargins generalize the textbook two-bus network feasibilityresults [2, Chapter 2], and unify recent results on feasibilityof decoupled active [3] and reactive [4] power flow. Whileour results are currently restricted to an unrealistic class ofnetworks (lossless, radial), the analysis presented is — in theauthors opinion — the most complete one available in theliterature. The theoretical results here also provide a partialexplanation for the robust numerical behavior of the FPPFiteration observed in Part I.
B. Organization of PaperSection II presents an extensive literature review, surveying
the history of power flow solvability results, with a focus onincorporating structural information into solvability conditions.
What’s next?
1 Analysis for meshed networksunresolved
2 Lossy networks (TPWRS: JWSP ’17)
3 Applications (n − 1, opt/control)22 / 24

Questions
https://ece.uwaterloo.ca/~jwsimpso/
23 / 24

appendix

Power flow and grid connectivity
“[Power flow feasibility] is one question which is unresolved in power systems analysis,but which is of basic theoretical and practical importance . . . is a given networkstructurally susceptible to unfeasibility? What type and what value of injections aremost likely to result in unfeasible situations?”
– F. D. Galiana, 1975
“The power systems theory needs to be pushed further in the direction of exploitingstructural features of the networks . . . realistic power systems models have at leasttwo different types of node dynamics (generators, loads) and the directional powerflows between them play a major role.”
— D. J. Hill & G. Chen, 2006
“Root causes of [the northeastern] blackout: lack of basic understanding of powersystems . . . theoretical understanding of nonlinear power system dynamics isinadequate. It is time for more theoretical research to develop alternatives tocomplement scenario-based simulation paradigm: mathematical theory to understandthe complex dynamic behavior of large-scale interconnected power systems utilizingmodern nonlinear mathematics.”
— Felix F. Wu, 2003

Power flow and grid connectivity
“[Power flow feasibility] is one question which is unresolved in power systems analysis,but which is of basic theoretical and practical importance . . . is a given networkstructurally susceptible to unfeasibility? What type and what value of injections aremost likely to result in unfeasible situations?”
– F. D. Galiana, 1975
“The power systems theory needs to be pushed further in the direction of exploitingstructural features of the networks . . . realistic power systems models have at leasttwo different types of node dynamics (generators, loads) and the directional powerflows between them play a major role.”
— D. J. Hill & G. Chen, 2006
“Root causes of [the northeastern] blackout: lack of basic understanding of powersystems . . . theoretical understanding of nonlinear power system dynamics isinadequate. It is time for more theoretical research to develop alternatives tocomplement scenario-based simulation paradigm: mathematical theory to understandthe complex dynamic behavior of large-scale interconnected power systems utilizingmodern nonlinear mathematics.”
— Felix F. Wu, 2003

Power flow and grid connectivity
“[Power flow feasibility] is one question which is unresolved in power systems analysis,but which is of basic theoretical and practical importance . . . is a given networkstructurally susceptible to unfeasibility? What type and what value of injections aremost likely to result in unfeasible situations?”
– F. D. Galiana, 1975
“The power systems theory needs to be pushed further in the direction of exploitingstructural features of the networks . . . realistic power systems models have at leasttwo different types of node dynamics (generators, loads) and the directional powerflows between them play a major role.”
— D. J. Hill & G. Chen, 2006
“Root causes of [the northeastern] blackout: lack of basic understanding of powersystems . . . theoretical understanding of nonlinear power system dynamics isinadequate. It is time for more theoretical research to develop alternatives tocomplement scenario-based simulation paradigm: mathematical theory to understandthe complex dynamic behavior of large-scale interconnected power systems utilizingmodern nonlinear mathematics.”
— Felix F. Wu, 2003