trus Equations
32
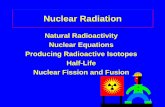
1 MS5019 – FEM 1 MS5019 – FEM 2 3.1. Definition of the Stiffness Matrix We will consider now the derivation of the stiffness matrix for the linear-elastic, constant-cross-sectional area (prismatic) bar element shown in Figure 3-1. θ 1 2 T y ˆ u x ˆ , ˆ L T x x f d 1 1 ˆ , ˆ x x f d 2 2 ˆ , ˆ y x Figure 3-1 Bar subjected to tensile forces T; positive nodal displacements and forces
description
truse persamaan
Transcript of trus Equations

1
MS5019 – FEM 1
MS5019 – FEM 2
3.1. Definition of the Stiffness MatrixWe will consider now the derivation of the stiffness matrix for the linear-elastic, constant-cross-sectional area (prismatic) bar element shown in Figure 3-1.
θ
1
2T
y
ux ˆ,ˆ
L
Txx fd 11
ˆ,ˆ
xx fd 22ˆ,ˆ
y
xFigure 3-1 Bar subjected to tensile forces T; positive nodal displacements and forces

2
MS5019 – FEM 3
The bar element is assumed to have constant cross-sectional area A, modulus elasticity E, and initial length L. The nodal d.o.f are local axial displacements (longitudinal displacements directed along the length of the bar).
)(0ˆˆ
ˆ
obtain we,ˆ respect to with atingdifferenti and (c)in (a) thenand (a)in (b) Eq. Usingbar. on the acting load ddistribute nofor
)(constanthave wem,equilibriu force From
)(ˆ
)(have weip,relationshplacement strain/dis theand law sHooke' From
dxdudAE
xdd
x
cTA
bdxud
aE
x
=⎟⎠⎞
⎜⎝⎛
==
=
=
σ
ε
εσ
MS5019 – FEM 4
The following assumptions are used in deriving the bar elements stiffness matrix:
.by strain axial torelated is stress axial is, that applies; law sHooke' 3.
ignored. isnt displaceme e transversofeffect Any 2..0ˆ and 0ˆ is that force;shear sustain cannot bar The 1. 21
xxx
x
yy
E
ff
εσεσ
=
==
The steps previously outlined in Chapter 1 are now used to derive the stiffness matrix for bar element.

3
MS5019 – FEM 5
Step 1 Select Element Type
Represent the bar by labeling nodes at each end and in general by labeling the element number (see Figure 3-1).
Step 2 Select a Displacement Functions
Assume a linear displacement variation along the local axis of the bar because a linear function with specified endpointshas a unique path.
)1.1.3(ˆˆ 21 xaau +=
with the total number of coefficients ai always equal to the total number of d.o.f associated with the element. Using the same procedure as in Section 2.2 for the spring element, we express Eq. (3.1.1) as
)2.1.3(ˆˆˆˆ
ˆ 112
xxx dx
Lddu +⎟
⎟⎠
⎞⎜⎜⎝
⎛ −=
MS5019 – FEM 6
[ ]
)4.1.3( ˆ
and ˆ
1
bygiven functions shapewith
)3.1.3(ˆˆ
ˆ
becomes (3.1.2) Eq. form,matrix in or
21
2
121
LxN
LxN
ddNNu
x
x
=−=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
=
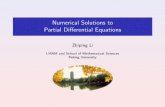
The linear displacement function plotted over the length of the bar element os shown in Figure 3-2. The bar is shown with the same orientation as in Figure 3-1.

4
MS5019 – FEM 7
Figure 3-2 Linear displacement plotted over the length of the element
θ
1
2u x
L
T
xd1
xd2ˆ
y
x
MS5019 – FEM 8
Step 3 Define the Strain-displacement and Stress-strain Relationships
The strain-displacement relationship is.
)6.1.3(
is iprelationshain stress/str theand(3.1.5), Eq.obtain tousedbeen have (3.1.4) and (3.1.3) Eqs. where,
)5.1.3(ˆˆ
ˆˆ 12
xx
xxx
E
Ldd
xdud
εσ
ε
=
−==

5
MS5019 – FEM 9
Step 4 Derive the Element Matrix and Equations
( ) )10.1.3(ˆˆˆ
becomes (3.1.9) Eq. (3.1.8), Eq. usingby or,)9.1.3(ˆ
1,-3 Figure of conventionsign force nodal by the Also,
)8.1.3(ˆˆ
obtain we(3.1.7), Eq.in (3.1.6) and (3.1.5) Eqs. Using)7.1.3(
havewemechanics, elementary From
211
1
12
xxx
x
xx
x
ddL
AEf
Tf
LddAET
AT
−=
−=
⎟⎟⎠
⎞⎜⎜⎝
⎛ −=
= σ
MS5019 – FEM 10
( )
element. spring afor constant spring the toanalogous iselement bar afor (3.1.14), Eq.In
element.bar or trussafor matrix stiffness therepresents (3.1.14) Eq.
)14.1.3(1111ˆ
(3.1.3) Eq. from have, we,ˆˆˆ because Now,
)13.1.3(ˆˆ
1111
ˆˆ
have weform,matrix in together (3.1.12) and (3.1.10) Eqs. Expressing
)12.1.3(ˆˆˆ
becomes (3.1.11) Eq. (3.1.8), Eq. usingby or,)11.1.3(ˆSimilarly,
2
1
2
1
122
2
kLAE
LAE
dd
LAE
ff
ddL
AEf
Tf
x
x
x
x
xxx
x
⎥⎦
⎤⎢⎣
⎡−
−=
=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦
⎤⎢⎣
⎡−
−=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
−=
=
k
dkf

6
MS5019 – FEM 11
Step 5 Assemble the Element Equations to Obtain the Total/Global Equations
Assemble the global stiffness and forces vectors and global equations using the direct stiffness method described in Chapter 2 can still be adopted in this case.The method applies for structures composedd of more than one element such that
[ ] { }
3.4). and3.3 Sectionsin described is nsnsformatiomatrix tra stiffness and
coordinate ofconcept (This (3.1.15). Eq.by indicated as appliedis methodditrect thebefore matrices stiffnesselement global to
ed transformbemust ˆ matrices stiffnesselement local all now where
)15.1.3( and 1
)(
1
)(
kk
fFkK ∑∑==
====N
e
eN
e
e FK
MS5019 – FEM 12
Step 6 Solve for the Nodal Displacements
Determine the displacement by imposing boundary conditions and simultaneously solving a system of equations, F = K d.
Step 7 Solve for the Element Forces
Finaly, determine the strains and stress in each element by back-substitution of the displacement into equations similar to Eqs. (3.1.5) and (3.1.6).
Example 3.1

7
MS5019 – FEM 13
3.2. Selecting Approximation Functions for Displacement
Consider the following guidelines, as they relate to the one-dimensional bar element, when selecting a displacement function. Further discussion will be provided in Chapter 4 (for the beam element).
1. Common approximation functions (AF) are usually polynomialssuch as that given by Eq. (3.1.1) or equivalently by Eq. (3.1.3), where the functionis expressed in terms of the shape functions.
2. The AF should be continuous within the bar element. The simple linear function of Eq. (3.1.1) certainly is continuous within the element.
3. The AF should provide interelement continuity for all d.o.f at each node for discrete line elements, and along common boundary lines and surfaces for two- and three-dimensional elements.
2k
MS5019 – FEM 14
For the bar element, we must ensure that nodes common to two or more elements remain common to the these elements upon deformation and thus prevent overlaps or voids between elements.For the two-bar structure (Figure 3-3), the linear function for displacement within each element will ensure that elements 1 and 2 remain connected; that is, the displacement at node 2 for element 1 will equal the displacement at the same node 2 for element 2. The linear function is then called a conforming (or compatible) functionfor the bar element because it ensure both the satisfaction of continuity between adjacent elements and of continuity within the element.
Figure 3-3 Interelement continuity of a two-bar structure
L1
L
2 31 2

8
MS5019 – FEM 15
4. The approximation function should allow for rigid-body motiondisplacement and for a state of constant strain within the element. The 1D displacement function, Eq. (3.1.1), satisfies these criteria because a1 term allows for rigid-body motion and the term allows for constant strain since is a constant. (This state of constant strain in the element can, if fact, occur if elements are chosen small enough).The simple polynomial Eq. (3.1.1) satisfying this fourth guidelines is said to be complete for the bar element. The completeness of a function is a necessary condition for convergence to the exact answer, for instant, for displacement and stresses.
The idea that the interpolation (approximation) function must allow for a rigid-body displacement means that the function must be capable of yielding a constant value (say, a1), because such a value can, in fact, occur.
xa22ˆˆ axdudx ==ε
MS5019 – FEM 16
occurs.nt displacemebody -rigid awhen alueconstant v a yield willˆ that soelement in thepoint withevery at unity to
addmust functionsion interpolatnt displaceme that theshows (3.2.5) Eq. Thus,
)5.2.3(1
obtain we(3.2.4), Eq.by Therefore,
)4.2.3()(ˆ
have then we(3.2.3), and (3.2.1) Eqs. From
)3.2.3()(ˆˆˆ
have we(3.1.3), Eq.in (3.2.2) Eq. Using)2.2.3(ˆˆor
)1.2.3(ˆcase heconsider tmust weTherefore,
21
1211
1212211
211
1
u
NN
aNNau
aNNdNdNu
dda
au
xx
xx
=+
+==
+=+=
==
=

9
MS5019 – FEM 17
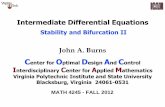
3.3 Transformation of Vectors in Two DimensionIn many problem it is convenient to introduce both local and global coordinates. Local coordinates are always chosen to convenientlyrepresent the individual element. Global coordinates are chosen to be convenient for the whole structures.Given the nodal displacement of an element, represented by the vector d in Figure 3-4, we want to relate the components of this vector in one coordinate system to components in another.
Figure 3-4 General displacement vector di
d
xθ
y
j
ij
xy
MS5019 – FEM 18
For general purposes, we will assume that d is not coincident with neither the local nor the global axes. In this case, we want to relate global displacement components to local ones.In doing that, we will develop a transformation matrix that willsubsequently be used to develop the global stiffness matrix for a bar element.
5.-3 Figure of use throughˆ and ˆ to and relate now will We.directions ˆ and ˆin vectorsunit are ˆ and ˆ ;directions and in the rsunit vecto are and where
)1.3.3(ˆˆˆˆ systems coordinateboth in nt displaceme vector expresscan We
.ˆ to fromCCW measured when positive be to angle thedefine We
jijijiji
jijidd
yxyx
dddd
xx
yxyx +=+=
θ

10
MS5019 – FEM 19
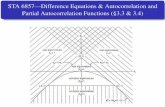
Figure 3-5 Relationship between local and global unit vectors
xθ
y
j
xy
b
ai
b'
i
a'j
MS5019 – FEM 20
Therefore, direction. ˆ- in the is anddirection ˆ in the is Now
)6.3.3(sinSimilarly,)5.3.3(cos
obtain weTherefore,)4.3.3(1
bygiven is magnitude its r,unit vecto a is because and)3.3.3(cos
cosines, of law thefrom Also,)2.3.3(
obtain weaddition, vector and 5-3 Figure Using
jbia
ba
ii
ia
iba
θθ
θ
=
=
=
=
=+

11
MS5019 – FEM 21
)13.3.3(ˆcosˆsinhave we(3.3.10), Eq.in (3.3.12) and (3.3.11) Eqs. Using
)12.3.3(ˆsin')11.3.3(ˆcos')10.3.3(''
obtain we5,-3 Figure from Similarly,)9.3.3(ˆsinˆcos
yields (3.3.2) Eq.in (3.3.8) and (3.3.7) Eqs. Using)8.3.3()ˆ)((sin)ˆ(and
)7.3.3(ˆ)(cosˆ
jij
ibja
jba
jii
jjbb
iiaa
θθ
θθ
θθ
θ
θ
+=
=
=
=+
−=
−=−=
==
MS5019 – FEM 22
. thecalled is
)17.3.3(
matrix The .ˆnt displaceme local the tont displaceme global therelates (3.3.16) Eq..sin and cos where
)16.3.3(ˆˆ
writtenare (3.1.15) Eqs. form,matrix In )15.3.3(ˆcossinand
ˆsincosobtain we(3.3.14), Eq.in ˆ and ˆ oft coefficien like Combining
)14.3.3(ˆˆˆˆ)ˆcosˆ(sin)ˆsinˆ(coshave we(3.3.1), Eq.in (3.3.13) qnd (3.3.9) Eqs. using Now,
matrix tiontransforma
dd
ji
jijiji
⎥⎦
⎤⎢⎣
⎡−
==⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡−
=⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
=+−
=+
+=++−
CSSC
θSC
dd
CSSC
dd
ddd
ddd
dddd
y
x
y
x
yyx
xyx
yxyx
θ
θθ
θθ
θθθθ

12
MS5019 – FEM 23
(3.3.16). Eq. ofequation first the toequivalent is (3.3.19) Eq.)19.3.3(ˆ
as ˆ of magnitude obtain the then we6,-3 Figure andtry trigonomeUsing
.components and global of in term expressed ˆ shows 6-3 Figure
)18.3.3(ˆˆ (3.3.1) Eq. from have, we0,ˆ of case For the
yxx
x
x
xyx
y
SdCdd
d
yxd
ddd
d
+=
=+
=
iji
Figure 3-6 Relationship between local and global displacementsxd x
θ
y
xy
yd xd
MS5019 – FEM 24
3.4. Global Stiffness MatrixWe will now use the transformation relationship Eq. (3.3.16) to obtain the global stiffness matrix for a bar element. We need the global stiffness matrix of each element to assemble the global stiffness matrix of the structure. We have shown in Eq. (3.1.13) that for a bar element in the local coordinate system,
)2.4.3(ˆˆˆor
)1.4.3(ˆˆ
1111
ˆˆ
2
1
2
1
dkf =
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦
⎤⎢⎣
⎡−
−=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
x
x
x
x
dd
LAE
ff
We now want to relate the global element nodal forces f to the global nodal displacement d for a bar element arbitrarily oriented with respect to the global axes as was shown in Figure 3-1.

13
MS5019 – FEM 25
)4.4.3(becomes (3.4.3) Eq. form,matrix simplifiedin or,
)3.4.3(
such thatelement theofmatrix stiffnessglobaltheyieldwillandbetween iprelationsh The
2
2
1
1
2
2
1
1
kdf
k
kdf
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
y
x
y
x
y
x
y
x
dddd
ffff
We observe from Eq. (3.4.3) that a total of four components of force and four of displacement arise when global coordinates are used.However, a total of two components of force and two of displacement appear for the local-coordinate representation of a spring or bar, as shown by Eq. (3.4.1).
MS5019 – FEM 26
)7.4.3(ˆasor
)6.4.3(00
00ˆˆ
writtenbecan (3.4.5) Eqs. form,matrix in or,
)5.4.3(sincosˆsincosˆ
that(3.3.15) Eq. iprelationshation transformfrom know We
*
2
2
1
1
2
1
222
111
dTd =
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎦
⎤⎢⎣
⎡=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
+=
+=
y
x
y
x
x
x
yxx
yxx
dddd
SCSC
dd
dddddd
θθθθ
By using relationship between local and global force components and between local and global displacement components, we will be able to obtain the stiffness matrix.

14
MS5019 – FEM 27
)12.4.3(ˆ(3.4.11)in (3.4.10) Eq. using and
)11.4.3(ˆˆobtain we(3.4.2), Eq. into (3.4.7) Eq. ngsubstituti Now,
)10.4.3(ˆasor
)9.4.3(00
00ˆˆ
have weation, transformforcefor Similarly,
)8.4.3(00
00where
**
*
*
2
2
1
1
2
1
*
dTkfT
dTkf
fTf
T
=
=
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎦
⎤⎢⎣
⎡=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦
⎤⎢⎣
⎡=
y
x
y
x
x
x
ffff
SCSC
ff
SCSC
MS5019 – FEM 28
)15.4.3(
0000
0000
where
)14.4.3(ˆasor
)13.4.3(
0000
0000
ˆˆˆˆ
obtain nt wedisplaceme nodaleach for (3.3.16) Eq. Usingzeros. are ˆ and ˆh even thoug scoordinate global of use the
withconsistent is order that the toˆ and ,ˆ ,ˆ expandmust weTherefore,matrix. square anot is because possibley immediatelnot is This
(3.4.12). Eq.in invert must weelement,an font displaceme nodal global toforces nodal global relating expression final the write toHowever,
2
2
1
1
2
2
1
1
21
*
*
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−=
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
CSSC
CSSC
dddd
CSSC
CSSC
dddd
ff
y
x
y
x
y
x
y
x
yy
T
Tdd
kfdT
T

15
MS5019 – FEM 29
have we,by (3.4.18) Eq. of sidesboth yingpremultipl Now, expanded. (3.4.12) Eq. is (3.4.18)Equation
)18.4.3(ˆobtain we
(3.4.18), Eq.in (3.4.16) and (3.4.14) Eqs. using Now .ˆin appear ˆ and ˆ numbers
row the toingcorrespond zeros of rows zero, are ˆ and ˆ since (3.4.17), Eq.In
)17.4.3(
ˆˆˆˆ
0000010100000101
ˆˆˆˆ
becomes form expandedin (3.4.1) Eq. Therefore, matrix. 4 4 toexpanded bemust ˆ Also, vectors.areboth -nt displaceme like are forces because
)16.4.3(ˆ can write weSimilarly,
1
21
21
2
2
1
1
2
2
1
1
−
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
×
=
T
TdkfT
k
kfTf
yy
yy
y
x
y
x
y
x
y
x
ff
ff
dddd
LAE
ffff
MS5019 – FEM 30
by formexplicit in given obtain we(3.4.22), Eq. into(3.4.17) Eq.in given ˆ of form expanded theand for (3.4.15) Eq. ngSubstituti
)22.4.3(ˆaselement an
formatrix stiffness global obtain the we(3.4.21, Eq. and (3.4.4) Eqs. Equating)21.4.3(ˆ
obtain. we(3.4.19), Eq. into (3.4.20) Eq. ngSubstituti text.t this throughouusedis ofproperty This .orthogonal is frames coordinater rectangulabetween
matrixation transformThe matrix. orthogonalan be to defines (3.4.10) Eq.by given assuch matrices square ofproperty The . of transpose theis where
)20.4.3( that shown, becan it However, . of inverse theis where
)19.4.3(ˆ
1
1-
1
kkT
TkTk
TdkTf
TTT
TTTTT
TTTdkTf
T
T
T
T
=
=
=
=
−
−

16
MS5019 – FEM 31
)26.4.3(by structure wholethe
for nt displaceme nodal global theand force nodal global therelated now is
)25.4.3(
such that summed becan matrix force nodal globalelement each Similarly,elements. ofnumber total theis andmatrix stiffness total theisK where
)24.4.3(
obtain. tomethod stiffnessdirect theusingsummed becan element each for matrix stiffness theelement,by element continuous
-piecewise assumed was(3.1.1) Eq. functiomnt displaceme trial thesince Now,
)23.4.3(
1
)(
1
)(
2
2
22
22
KdF
dFK
Ff
Kk
=
=
=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
−−−−
=
∑
∑
=
=
N
e
e
N
e
e
N
SsymetryCSCSCSSCSCCSC
LAEk
MS5019 – FEM 32
3.5. Computational of Stress for a Bar in x-y PlaneWe will now consider the determination of the stress in a bar element. For a bar, the local forces are related to the local displacement by Eq. (3.1.13). This equation is repeated here for convenience.
( )
[ ] )3.5.3(ˆˆ
11ˆ
have we3.5.1 Eq. From7.-3 Figurein shown asbar on the pullsit because used is ˆ where
)2.5.3(ˆ
is stress tensileaxial of definition usual The
)1.5.3(ˆˆ
1111
ˆˆ
2
12
2
2
2
1
2
1
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
−=
=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦
⎤⎢⎣
⎡−
−=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
x
xx
x
x
x
x
x
x
dd
LAEf
fAf
dd
LAE
ff
σ

17
MS5019 – FEM 33
[ ]
[ ] )5.5.3(11
obtain we(3.4.7), Eq. using Now,
)4.5.3(ˆ11
yields(3.5.3)and(3.5.2) Eqs. combining Therefore,
*dTσ
σ
−=
−=
LE
dLE
Figure 3-7 Basic bar element with positive nodal forces
x
yx
xf 2
xf1
L
MS5019 – FEM 34
[ ]
[ ] )8.5.3('
have we(3.5.7), Eq.in matrix thegmultiplyinAfter
)7.5.3(00
0011'
(3.4.8), Eq. using where,)6.5.3('
as formsimilar in expressed becan (3.5.5)Equation
SCSCLE
SCSC
LE
−−=
⎥⎦
⎤⎢⎣
⎡−=
=
C
C
dCσ

18
MS5019 – FEM 35
3.6. Solution of a Plane TrussWe will now illustrate the use of equations developed in Section 3.4 qnd 3.5, along with the direct stiffness method of assembling the total matrix and equatons, to solve the following plane truss example problem.A plane truss is a structure composed of bar elements all lying in a common plane that connected together by frictionless pins. The plane truss also must have loads acting only in common plane.
EXAMPLE 3.5
MS5019 – FEM 36
3.7. Transformation Matrix and Stiffness Matrix for a Bar in Three-Dimensional Space
We will now derive the tranformation matrix for a bar element in 3-D space as shown in Figure 3-8.
Figure 3-8 Bar in 3-D space
3.7. Transformation Matrix and Stiffness Matrix for a Bar in Three-Dimensional Space
We will now derive the tranformation matrix for a bar element in 3-D space as shown in Figure 3-8.

19
MS5019 – FEM 37
)3.7.3(
ˆ
ˆ
ˆ
product,dot theof definitionby and,)2.7.3()ˆ()ˆ()ˆ(00ˆ
have we,ˆ with (3.7.1) Eq. ofproduct dot theTaking
)1.7.3(ˆˆˆˆˆˆas D-3in expressed ˆ vector thegconsiderinby
of derivation begin the We.ˆsuch that determinemust We2. node to1 node fromelement thealong directed ˆ Here .ˆ axis local the toly,respective
axes, and ,, global from measured angles thebe and ,,let Also,ly.respective ),,( and ),,( scoordinate thehave 2 and 1 node Let the
12
12
12
***
222111
z
y
x
zyxx
zyxzyx
zyx
CL
zz
CL
yy
CL
xx
dddd
dddddd
xxzyx
zyxzyx
=−
=⋅
=−
=⋅
=−
=⋅
⋅+⋅+⋅=++
++=++
=
=
ki
ji
ii
kijiiii
kjikjidd
TdTdT
θθθ
MS5019 – FEM 38
[ ]
)6.7.3(000
000ˆˆ
as formexplicit in written becan ˆ (3.7.5), Eq. using Now.directions and , , global in theor that vectof components
thegives (3.7.5) Eq. axis, ˆ thealong directed spacein vector aFor )5.7.3(ˆ
have we(3.7.2), Eq.in (3.7.3) Eqs. using Therefore,ly.respective , and , ,on of sprojection theare and , , Here
)4.7.3(coscoscosand)()()( where
2
2
2
1
1
1
2
1
*
212
212
212
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=⎥⎦
⎤⎢⎣
⎡=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
=
++=
===−+−+−=
z
y
x
z
y
x
zyx
zyx
x
x
zzyyxxx
zyx
zzyyxx
dddddd
CCCCCC
dd
zyx
xdCdCdCd
CCC
CCCzzyyxxL
dTd
kjii
θθθ

20
MS5019 – FEM 39
:follows as ˆ)( equation theusing obtained is Then . ofplacein (3.7.7), Eq.by defined , usingsimply by here obtained be lresult wil same the
However, 3.4.Section in to expandingin done that toanalogousmanner ain matrix ation transform theexpandmust wegeneral,In space.in orientedarbitrary bar a ofmatrix
stiffness theof form general theexpress toused be now illequation w This .ˆby generalin given ismatrix stiffness global that the3.4Section in shown have We
system. coordinate global in the componentsnt displaceme of in terms expressedbe toˆmatrix nt displaceme local theenables which matrix,ation transform theis
)7.7.3( 000
000
where
*T*
*
*
TkTkkTT
TT
TkTk
d
=
=
⎥⎦
⎤⎢⎣
⎡=
T
zyx
zyx
CCCCCC
T
MS5019 – FEM 40
space. D-3in element bar afor matrix stiffness theof form basic theis (3.7.9)Equation
)9.7.3(
Symetry
as of formexplicit obtain the we(3.7.8), Eq. implifying
)8.7.3(000
0001111
000
000
where
2
2
2
22
22
22
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−−−−−−
=
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
−
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
z
zyy
zxyxx
zzyzxz
zyyyxzyy
zxyxxzxyxx
zyx
zyx
z
y
x
z
y
x
CCCCCCCCCCCCCCC
CCCCCCCCCCCCCCCCCC
LAE
S
CCCCCC
LAE
CCC
CCC
k
k
k

21
MS5019 – FEM 41
3.8. Potential Energy ApproachWe now present the principle of minimum potential energy (POMPE)to derive the bar element equations. Recall from Section 2.6 that the total PE, πp was defined as the sum of the internal strain energy U and the potential energy of the external forces Ω as
)1.8.3(Ω+= Upπ
To evaluate the strain energy for a bar, we consider only the work done by the internal forces during deformation. Because we are dealing with a 1-D bar, the internal force doing work is given in Figure 3-9 as σx(Δy)(Δz), due only to normal stress σx. The displacement of the x face of element is Δx(εx); the displacement of x + Δx face is Δx(εx + dεx). The change in displacement is then Δxdεx, where dεx is differential change in strain occuring over element Δx.
MS5019 – FEM 42
)4.8.3(
have the webar, wholeFor the)3.8.3(
(3.8.2). Eq.from obtain, wezero,approach element theof volume theletting and gRearrangin
)2.8.3( )())((
bygiven moves, force which thent throughdisplaceme theby multiplied force internal theis energy)strain (or work internal aldifferenti The
0 dVdU
dV ddU
ddU
dU
V
dxF
x
xx
xx
xzyxx
∫∫∫ ∫ ⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
=
=
ΔΔΔ=
ε
εσ
εσ
εσ4847648476
Figure 3-9 Internal force in a 1-D bar

22
MS5019 – FEM 43
Now, for a linear-elastic (Hooke’s law) material as shown in Figure 3-10, we see that σx = Eεx. Hence, substituting this relationship into Eq. (3.8.4), integrating with respect to εx, and then substituting σx for Eεx, we have
stress. D-1for energy strain for the expression theas
)5.8.3(21∫∫∫=V
dVU xxεσ
Figure 3-10 Linear-elastic (Hooke’s law) material
MS5019 – FEM 44
)6.8.3(ˆˆˆˆˆ
bygiven is forces, external by the done is workthelost when is forces external of PE thebecause expressionwork
external thefromsign in oppositebeingforces, external theof PE The
force nodalloading surfaceforecbody
11
dfdSuTdVuXM
iSVixixxb
434214342143421∑∫∫∫∫∫
=−−−=Ω
11.-3 Figurein shown asbar theofdirection ˆ local in theact toconsidered are ˆ and ,ˆ ,ˆ forces The
.ˆ forces edconcentrat nodal (3) and
area), surfaceunit per force of units(in ˆ loading surface (2) volume),unitper force of units(in ˆ forcebody (1) of PE therepresent
(3.8.6) Eq. of sideright on the terms thirdand second, first, thewhere
xfTX
f
TX
ixxb
ix
x
b

23
MS5019 – FEM 45
Figure 3-11General forces acting
on a 1-D bar
In Eq. (3.8.5) and (3.8.6), V is the volume of the body and S1 is the part of the surface S on which surface loading acts. For a bar element with two nodes and one d.o.f per node, M = 2.
We are now ready to describe the FE formulation of the bar element equations using th POMPE.
The FE process seeks a minimum in the PE within the constraint of an assumed displacement pattern within each element. The greater the number of d.o.f. associated with the element, the more closely will the solution approximate the true one and ensure complete equilibrium. An approximate FE solution using the stiffness method will always provide an approximation value of PE greater than or equal to the correct one.
MS5019 – FEM 46
The method also results in a structure behavior that is predicted to be physically stiffer than, or at best to have the same stiffness as, the actual one. This is explained by the fact that structure model is allowed to displaced only into shapes defined by the erms of the assumed displacement field within each element of the structure. The correct shape is ussually only approximated bya the assumed field, although the correct shape can be the same as the assumed field. The assumed field effectively constraints the structure from deforming in its natural manner, This constraint effect stiffens the predicted behavior of the structure.Apply the following steps when using the POMPE to derive the FE equations.
1. Formulate an expression for the total PE.2. Assume the displacement pattern to vary with a finite set of
undetermined parameters (nodal displacements).3. Obtain a set of simultaneous equations minimizing the total PE with
respect to these nodal displacements.

24
MS5019 – FEM 47
The resulting equations are the approximate (or possibly exact) equilibrium equations whose solution for the nodal parameters seeks to minimize the PE when back-substitued into the PE expression. The proceeding three steps will now followed to derive the bar element equations and stiffness matrix.
Consider the bar element of length L, with constant cross-sectional area A, shown in Figure 3-11. Using Eqs. (3.8.5) and (3.8.6), the total PE, Eq. (3.8.1), becomes.
.ˆwith most vary at and variablesandcontant is since
)7.8.3(ˆˆˆˆˆˆˆˆˆ2 2211
0
xA
dVXudSTudfdfxdA
xx
bxxxxx
L
xxpVS
εσ
εσπ ∫∫∫∫∫∫ −−−−=
MS5019 – FEM 48
[ ]{ }
[ ]
{ }
{ } { } )11.8.3(ˆ11as written becan strain
axial the,ˆˆ iprelationshplacement strain/dis theusing Then,
)10.8.3(ˆˆˆ
and
)9.8.3(ˆˆ
1
where)8.8.3(ˆˆ
bynt displaceme nodal and functions shape theof in terms expressedfunctionnt displacemeaxialthehavewe(3.1.4), and (3.1.3) Eqs. From
2
1
dLL
xdudddd
Lx
LxN
dNu
x
x
x
x
⎥⎦⎤
⎢⎣⎡−=
=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
=
⎥⎦⎤
⎢⎣⎡ −=
=
ε
ε

25
MS5019 – FEM 49
{ } [ ]{ }
[ ]
[ ] [ ]{ }
[ ] [ ]
[ ] [ ][ ]{ } )16.8.3(ˆas (3.8.14) Eq. expresscan we(3.8.12), Eq.by Now,
.elasticity of modulus theis and iprelationshain stress/str D-1 for the)15.8.3(
where)14.8.3(
bygiven is iprelationshain stress/str axial The
)13.8.3(11define wewhere
)12.8.3(ˆor
dBD
EED
D
LLB
dB
x
xx
x
=
=
=
⎥⎦⎤
⎢⎣⎡−=
=
σ
εσ
ε
MS5019 – FEM 50
{ } { } { } { } { } { } { } { }{ }
{ } { } { }{ }
{ } [ ] [ ] [ ]{ } { } { } { } [ ] { }{ } [ ] { } )18.8.3(ˆ
ˆˆˆˆˆ2
obtain we(3.8.17), Eq.in (3.8.16) and (3.8.12), (3.8.11), Eqs. sing U(3.8.17). Eq.in d transposeis ˆtion multiplicamatrix proper for so matrices,
column are generalin ˆ and ˆ Similarly, .on transpose theplacemust tion wemultiplicamatrix proper For matrices.column are and both
generalin whereand loads nodal edconcentrat therepresents now where
)17.8.3(ˆˆˆˆˆˆ2
bygiven PE total thehave weform,notation matrix in expressed (3.8.7) Eq. g Usin
0
x
0
∫∫∫
∫∫∫
∫∫∫∫∫∫
−
−−=
−−−=
Vb
TTS
xTTT
LTTT
p
x
xx
Vb
T
Sx
TTL
xT
xp
dVXNd
dSTNdPdxddBDBdA
uTu
P
dVXudSTuPdxdA
π
σ
εσπ
εσ

26
MS5019 – FEM 51
{ } [ ] [ ] [ ]{ } { } { }
{ } { } [ ] { } [ ] { }
{ } [ ] { }{ } [ ] { } )20.8.3(ˆˆ
)20.8.3(ˆˆas vectorsforce-body and tractionssurface
thesedefine Weforces. nodal edconcentrat and , tractionssurface forces,body from onscontributi load of typesseparate threeobserve we(3.8.20), Eq. From
)20.8.3(ˆˆˆ where
)19.8.3(ˆˆˆˆ2
yields ˆ respect to with (3.8.18) Eq. gintegratin Therefore, .ˆ of functionsnot are
ˆ and ˆ d.o.f nodal theand (3.8.15), and (3.8.13) Eqs. ],[adn ][ However,
).ˆ ,ˆ( is, that };ˆ{ offunction a be seen to is (3.8.18), Eq.In
21
21
bdVXNf
adSTNf
dVXNdSTNPf
fddBDBdALxx
ddDB
ddd
Vb
Tb
Sx
Ts
Vb
T
Sx
T
TTTT
p
xx
xxppp
∫∫∫
∫∫
∫∫∫∫∫
=
=
++=
−=
=
π
πππ
MS5019 – FEM 52
{ } { } [ ] [ ] [ ]{ }
{ } [ ] [ ][ ]
{ } ( ) )24.8.3( ˆˆˆ2ˆ
obtain we(3.8.23), Eq. gSimplifyin
)23.8.3( ˆˆˆˆ
yields (3.8.22) Eq.in (3.8.15) and (3.8.13), (3.8.10), Eqs. Using)22.8.3( ˆˆ
:econveniencfor following thedefine We(3.8.21). Eq.apply to(3.8.19) Eq.by given evaluate explicitly weNow
)21.8.3( 0ˆ and 0ˆ
that requiresnt displaceme nodaleach respect to with of Minimizing
2221
212
*
2
1111
1
21*
*
21
xxxx
x
xLL
L
Lxx
TTT
p
x
p
x
p
p
ddddLEU
ddEddU
dBDBdU
dd
+−=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
−⎭⎬⎫
⎩⎨⎧−
=
=
=∂
∂=
∂
∂
π
πππ

27
MS5019 – FEM 53
{ } { }{ } { }
( )
( )
{ } )27.8.3( 00
ˆˆ
ˆˆ
11-1-1
ˆ
yields (3.8.26) Eq. express weform,matrix In
0ˆˆ2ˆ2LE
2
)26.8.3( and
0ˆˆ2ˆ2LE
2
obtain we(3.8.21), Eqs.applying theand (3.8.19) Eq.in (3.8.25) and (3.8.24) Eqs. using Therefore,
)25.8.3( ˆ ˆˆˆis ˆˆfor expressionexplicit theAlso,
2
1
2
1
22122
12121
2211
⎭⎬⎫
⎩⎨⎧
=⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
−⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦
⎤⎢⎣
⎡=
∂
∂
=−⎥⎦⎤
⎢⎣⎡ +−=
∂
∂
=−⎥⎦⎤
⎢⎣⎡ −=
∂
∂
+=
x
x
x
xp
xxxx
p
xxxx
p
xxxx
T
T
ff
dd
LAE
d
fddALd
fddALd
fdfdfd
fd
π
π
π
MS5019 – FEM 54
{ } [ ] { }[ ]
[ ] [ ][ ]{ } { }[ ] [ ]
[ ] [ ][ ] [ ]
[ ].ˆ evaluating of task thesimplifiesgreatly whichconcept,ation differentimatrix thisuse will we text, thisThroughout
(3.2.28). Eq.by given ˆ toequal then is of evaluation theofresult The (3.8.29). Eq. gin writtin usedbeen has where
)29.8.3( 0ˆˆ
obtain to(3.8.19) Eq. odirectly tit apply andation differentimatrix theusecan we, evaluating explicitly of process cumbersome theof instead Finally,
)28.8.3( 11-1-1ˆ
aselement bar for thematrix stiffness thehave we,ˆ ˆˆ sinceor
1
k
kBDBALDD
fdBDBALd
LAEk
dkf
T
T
x
p
p
=
=−=∂
∂
⎥⎦
⎤⎢⎣
⎡=
=
π
π

28
MS5019 – FEM 55
3.9. Galerkin’s Residual MethodWe have develop the bar FE equations by the direct method in Section 3.1 and by the PE method (one of number of variation methods) in Section 3.8. In fields other than structural/solids mechanics, it is quite probable that a variational principle, analogous to the principle of minimum PE, for instance, may not be known or even exist. In some flow problems in fluid mechanics and in mass transport problems, we often have the differential equations and BC available. However, the FE method can still be applied.The weighted residual method (WRM) applied directly to the differential equation can be used to develop the FE equations. In this section, we describe Galerkin’s residual method (GRM) in general and the apply it to the bar element.
MS5019 – FEM 56
This development provides the basis for later applications of GRM to the beam element in Chapter 4 and to the non-structural problems.There are a number of other WRM. Among these are collocation, sub-domain method, least square, and least square collocation. (For more on these methods, see Reference [4].). However, since GRM is more well known than the other WRM, it is the only one described in this text.In WRM, a trial or approximate function is chosen to approximate the independent variable, such as a displacement or a temperature, in a problem defined by a differential equation. This trail function will not, in general, satisfy the governing differential equation. Thus, the substitution of the trail function into the differential equation result in a residual over the whole region of the problem as follows
)1.9.3(minimum=∫∫∫V
dVR

29
MS5019 – FEM 57
In the WRM, we require that a weighted value of the residual be a minimum over the whole region. The weighting functions allow theweighted integral of residuals to go to zero. Denoting the weighting function by W, the general form of the weighted residual integral is
)2.9.3(minimum=∫∫∫V
dVRW
Using GRM, we chose the interpolation function, such as Eq. (3.1.3), in terms of Ni shape functions for the independent variable in the differential equation. In general, this substitution yields the residual R ≠0. By the Galerkin criterion, the shape functions are chosen to play the role of the weighting functions W. Thus, for each i we have.
)3.9.3(),,3,2,1(0 nidVRNV
i L==∫∫∫Eq. (3.9.3) results in total of n equations.
MS5019 – FEM 58
Equation (3.9.3) applies to points within the region of a body without reference to BC such as specified applied loads or displacement. To obtain BC, we apply integration by parts to Eq. (3.9.3), which yields integrals applicable for the region and its boundary.
Bar Element FormulationWe now use GRM to formulate the bar element stiffness equations. We begin with the basic element differential equation, without distributed load, derived in Section 3.1 as
assumed. now are and constant where
)4.9.3(0)ˆˆ
(ˆ
EA
xdudAE
xdd
=

30
MS5019 – FEM 59
The residual R is now defined to be Eq. (3.9.4). Applying Galerkin’s criterion, Eq. (3.9.3), to Eq. (3.9.4), we have
becomes(3.9.5) Eq. (3.9.6), Eq. toaccording partsby gintegratin and (3.9.5) Eq.in
)7.9.3(
ˆˆˆ)
ˆˆ
(ˆ
ˆˆ
Letting equation. general in the iablessimply var are and where
)6.9.3(by generalin given is
partsby n Integratio (3.9.5). Eq. topartsby n integratioapply now We
)5.9.3()2,1(0ˆ)ˆˆ
(ˆ0
xdudAEvxd
xdudAE
xdddv
xdxd
dNduNu
vu
duvuvdvu
ixdNxdudAE
xdd
ii
L
i
==
==
−=
==
∫∫
∫
MS5019 – FEM 60
[ ]{ }
)11.9.3(ˆˆ
ˆˆ
ˆ11ˆ
as (3.9.8) Eq. express then we(3.9.8), Eq.in (3.9.10) Eq. Using
)10.9.3(ˆˆ11
ˆˆ
obtain we, and for (3.1.4) Eqs. usingor
)9.9.3(ˆˆ
ˆˆˆ
ˆhave we,ˆˆ because that,Recall
.conditionsboundary theintroduces partsby n integratio thewhere
)8.9.3(0ˆˆˆ
ˆˆˆ
00 2
1
2
1
21
22
11
00
L
i
L
x
xi
x
x
xx
iLL
i
xdudAEN
ddxd
LLxddNAE
dd
LLxdud
NN
dxd
dNdxd
dNxdud
dNu
xdxd
dNxdudAE
xdudAEN
⎟⎠⎞
⎜⎝⎛=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦⎤
⎢⎣⎡−
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦⎤
⎢⎣⎡−=
+=
=
=−
∫
∫

31
MS5019 – FEM 61
( ) )14.9.3(ˆˆˆ
yields (3.9.13) Eq. Evaluating.at 0 and 0at 1 because ˆˆ where
)13.9.3(ˆˆˆ
ˆ111
obtain we,ˆ
for ngSubstituti
)12.9.3(ˆˆ
ˆˆ
ˆ11ˆ
have we,function weighting theusing First,).for one and for (one equations 2really is (3.9.11)Equation
121
111
10 2
1
1
01
0 2
11
1
21
xxx
x
x
L
x
x
LL
x
x
i
ii
fddL
AE
LxNxNxdudAEf
fddxd
LLLAE
xddN
xdudAEN
ddxd
LLxddNAE
NNNNNN
=−
=====
=⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦⎤
⎢⎣⎡−⎥⎦
⎤⎢⎣⎡−
⎟⎠⎞
⎜⎝⎛=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦⎤
⎢⎣⎡−
===
∫
∫
MS5019 – FEM 62
( )
methods. al variationanddirect by the ly,respectivederived, (3.8.27) and (3.1.13) Eqs. as same thebe seen to then (3.9.17) Eq.
)17.9.3(ˆˆ
1111
ˆˆ
as formmatrix in written becan (3.9.16) and (3.9.14) Equations.0at 0 and at 1 because )ˆˆ( where
)16.9.3(ˆˆˆ
yields (3.9.15) Eq. gSimplifyin
)15.9.3(ˆˆ
ˆˆ
ˆ111
obtain we,N using Similarly,
2
1
2
1
222
212
02
0 2
1
2
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦
⎤⎢⎣
⎡−
−=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
=====
=−
⎥⎦⎤
⎢⎣⎡=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦⎤
⎢⎣⎡−⎥⎦
⎤⎢⎣⎡
=
∫
x
x
x
x
x
xxx
LL
x
x
i
dd
LAE
ff
xNLxNxdudAEf
fddL
AE
xdudAEN
ddxd
LLLAE
N

32
MS5019 – FEM 63
Reference:1. Logan, D.L., 1992, A First Course in the Finite Element Method,
PWS-KENT Publishing Co., Boston.
2. Imbert, J.F.,1984, Analyse des Structures par Elements Finis, 2nd Ed., Cepadues.
3. Zienkiewics, O.C., 1977, The Finite Eelement Method, 3rd ed., McGraw-Hill, London.
4. Finlayson, B.A., 1972, The Method of Weighted Residuals and Variational Principles, Academic Press, New York.