A Strain Gauge Based Torque Transducer (Sensor) for ... · PDF fileA Strain Gauge for...
4
Click here to load reader
Transcript of A Strain Gauge Based Torque Transducer (Sensor) for ... · PDF fileA Strain Gauge for...

A Strain Gauge
for Measuring
1Faculty of Science, University of Sirte
2Faculty
Abstract-Torque measurement is paramount in engine and
transmission testing, turbine testing, pump testing and testing of
gear trains and power measurement within propulsion systems.
Monitoring torque can be critical to the performance of axles,
drive trains, gear drives, and electric and hydraulic motors. Other
in-plant applications include gas and steam turbines. Really,
torque is an important factor in anything that rotates or spins on
a shaft, spindle or axle. In this research, the shaft w
for the application of a “V shaped” strain gauge;
torque on a rotating shaft. The implementation of the transducer
will be executed. This paper also discusses
transducer with Spider8 measurement electronics,
diagram of the measuring chain, main points of the measuring
software and the measurement accuracy. T
tested with simulated loads. The structure
possible for measuring torque with strain gauges on it. This saves
wear on the drive system and increases product quality.
I. INTRODUCTION
Although torque is unquestionably an important mechanical
quantity in the construction of machines; its significance is not
confined to that area alone. The precise measurement of torque,
particularly in rotating components, places heavy demands on
manufacturers and users of test benches. The situation is
further complicated by the trend towards improv
mechanical performance of modern engines by increasing the
rotational speed; coupled with a desire for greater accuracy in
such areas as the measurement of efficiency [2].
There is no denying that signals play a major role in our life.
A signal can be a function of time, distance, position,
temperature, pressure, torque, etc., and it represents some
variables of interest associated with a system. For example
an electrical system the associated signals are electric cu
and voltage. In a mechanical system, the associated signals
may be force, speed, torque, etc [1]-[4]. It is
that the most important quantity of a rotating machine is the
acting mechanical power. There are many methods to measure
this. By definition, the most straightforward
by measuring both the torque directly on the rotating shaft and
the rotational speed. There are many widely used measuring
methods and more or less standardized instruments for
measuring rotational speed; however
measurement device is specific for each application, since
must be built onto the machine’s structure.
Based Torque Transducer (Sensor)
Measuring Dynamical Load In-
M. Hilal Muftah1 and S. M. Haris2
Faculty of Science, University of Sirte, Sirte, Libya
aculty of Engineering & Built Environment
Universiti Kebangsaan Malaysia
43600 UKM Bangi, Malaysia
Torque measurement is paramount in engine and
transmission testing, turbine testing, pump testing and testing of
gear trains and power measurement within propulsion systems.
Monitoring torque can be critical to the performance of axles,
drives, and electric and hydraulic motors. Other
plant applications include gas and steam turbines. Really,
torque is an important factor in anything that rotates or spins on
the shaft will be adapted
” strain gauge; to measure the
implementation of the transducer
is paper also discusses calibration of the
transducer with Spider8 measurement electronics, the block
the measuring chain, main points of the measuring
The transducer is then
of a grinder makes it
possible for measuring torque with strain gauges on it. This saves
product quality.
NTRODUCTION
ough torque is unquestionably an important mechanical
; its significance is not
confined to that area alone. The precise measurement of torque,
particularly in rotating components, places heavy demands on
benches. The situation is
further complicated by the trend towards improving the
dern engines by increasing the
with a desire for greater accuracy in
such areas as the measurement of efficiency [2].
ignals play a major role in our life.
can be a function of time, distance, position,
., and it represents some
of interest associated with a system. For examples, in
an electrical system the associated signals are electric current
echanical system, the associated signals
It is undoubtedly true
rotating machine is the
acting mechanical power. There are many methods to measure
straightforward method would be
the torque directly on the rotating shaft and
the rotational speed. There are many widely used measuring
methods and more or less standardized instruments for
however for torque, the
device is specific for each application, since it
nto the machine’s structure. For many years
metallic resistance strain gauges have been used as principal
sensors for measuring torque on a shaft. Therefore,
gauge torque transducer is capa
[3]-[5].
Torque is defined as a measure
object that causes it to rotate.
about an axis, which is call
“Distance (r)” from the pivot point to the point where the force
acts is called the moment arm. Note that
a vector, and points from the axis of rotation to the point where
the force acts, as shown in Fig.1 [1]
Fig.1.
More generally, the torqu
“Position (r)” in some reference frame) can be defined as
the cross product:
Where “particle's position (r)
fulcrum, and “Force (F)” is the
“Magnitude (τ)” of the torque is given by
Where “Distance (r)” is the distance
to the particle, “ Force (F)”
applied, and “Angle (θ)” is the angle between
force vectors [16]-[17]-[18].
II. MATERIALS AND
A. Strain Measurement CStrain gauges change resistance in response to the surface
strains that they sense. The relationship between strain and
Torque Transducer (Sensor)
-Rotation
metallic resistance strain gauges have been used as principal
sensors for measuring torque on a shaft. Therefore, the strain
e torque transducer is capable to measure dynamical loads
measure of the force acting on an
to rotate. “Force (F)” rotates the object
called the “Pivot Point (O)”. The
from the pivot point to the point where the force
acts is called the moment arm. Note that “Distance (r)”, is also
a vector, and points from the axis of rotation to the point where
the force acts, as shown in Fig.1 [1]-[7]-[8].
. Definitions
More generally, the torque on a particle (located at
in some reference frame) can be defined as
(1)
)” is the vector relative to the
is the force acting on the particle. The
of the torque is given by
(2)
distance from the axis of rotation
)” is the magnitude of the force
the angle between the position and
ATERIALS AND METHODS
Strain Measurement Circuit ges change resistance in response to the surface
they sense. The relationship between strain and
Development, Energy, Environment, Economics
ISBN: 978-960-474-253-0 75

resistance is expressed by the gauge factor (G.F.) of the strain
gage foil, which can range from (2.0 -4.0)
foil material is constantan, (a 55% copper
alloy) having a gauge factor of (2.0). The
are converted into voltage changes by passive
The voltage is then amplified for signal transmission or display
[11]-[18]-[20].
Excitation is usually supplied to such networks
regulated power supply. The output of networks used with
semiconductor strain gauges may be large enough, for some
applications to obviate the need for amplification [2]
Wheatstone bridge circuits are used for most types of strain
measurements. The Wheatstone bridge is well suited for
measurement of small changes in resistance and is
suitable for measuring resistance change
(SG). It is commonly known that the strain ga
applied strain into a proportional change of resistance.
The applied strains is defined by
Where ( ) is the change in length and (l) is the original length.
The relative change of the resistance of a strain ga
described by the equation
Where ( ) is the change in resistance and
resistance. The "factor (k)", also known as the ga
characteristic of the strain gauge obtained
The exact value is specified by the strain ga
In general, the gauge factor for metal strain gages is about 2.
In the following, the Wheatstone bridge circuit
described with respect to its application in strain ga
applications. Two different presentations are
is based on the original notation of Wheatstone, and
is an alternate notation that can be more easily understood
person without an electrical or electronic engineering
background. Both versions are, in fact, identical in their
electrical functions.
Fig.2. Wheatstone bridge circuit
The most common Wheatstone bridge circuit used as a
strain gauge bridge is the four arm bridge construction
which each of the four arms is active, which means that each
arm contains a gauge that senses strain [2]-
B. Design of the Torque Transducer with Strain G
ge factor (G.F.) of the strain
). The most common
a 55% copper and 45% nickel
changes in resistance
are converted into voltage changes by passive circuit networks.
The voltage is then amplified for signal transmission or display
supplied to such networks by a
regulated power supply. The output of networks used with
semiconductor strain gauges may be large enough, for some
applications to obviate the need for amplification [2]-[16].
circuits are used for most types of strain
The Wheatstone bridge is well suited for
in resistance and is therefore,
suitable for measuring resistance changes in a strain gauge
strain gauge transforms
strain into a proportional change of resistance.
(3)
is the original length.
change of the resistance of a strain gauge is
(4)
and (R) is the original
known as the gauge factor, is a
obtained experimentally [2].
strain gauge manufacturers.
ge factor for metal strain gages is about 2.
, the Wheatstone bridge circuit is
with respect to its application in strain gauge
. Two different presentations are shown, (Fig. 2: a)
is based on the original notation of Wheatstone, and (Fig. 2: b)
can be more easily understood by a
person without an electrical or electronic engineering
. Both versions are, in fact, identical in their
bridge circuit
Wheatstone bridge circuit used as a
bridge construction, in
which each of the four arms is active, which means that each
-[9]-[16].
Design of the Torque Transducer with Strain Gauge
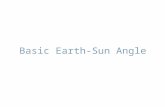
Fig.3. 28mm diameter
Referring to Fig. 3, the indicated strain can be calculated
using the following data:
“Electrical Power (5KW)”
(22.08Nm)”, “Diameter (28mm1)”, “Young’s Modulus (202
(ν=0.28)” [6]-[16].
Then the calculations can be applied as
For a full bridge circuit (four active strain gauge
Where:-
The strain of a single strain gauge
C. Torque Transducer Calibration
There are various methods of transferring the measuring
signal from rotating shafts. For a slow rate of rotation with only
a few revolutions of the measured
and unwinds provides the simplest solution. It is applicable to
all types of circuits [15]-[17].
A second method is the transfer of the bridge supply
voltage and the measuring signal using sets of slip rings. Only
high quality versions are suitable due to the requirement
extremely low contact resistance between the slip ring and the
brush. Low wear at high speeds and very low thermal voltages
are also demanded [6]-[19]-[21]
The calibration will be done with Sp
output of the “Voltage (mV
computer for each weight
weights in the Spider8 channel set up window
bridge must be selected with zero
28mm diameter shaft
he indicated strain can be calculated
KW)”, with “Torsion Moment
mm)” of shaft, “Speed (3000min-
(202KN/mm2)”and “Poison’s Ratio
can be applied as follows:
full bridge circuit (four active strain gauges)
(5)
(6)
(7)
(8)
The strain of a single strain gauge is then:
(9)
alibration
There are various methods of transferring the measuring
signal from rotating shafts. For a slow rate of rotation with only
few revolutions of the measured object, a cable that winds
and unwinds provides the simplest solution. It is applicable to
A second method is the transfer of the bridge supply
voltage and the measuring signal using sets of slip rings. Only
suitable due to the requirement for
extremely low contact resistance between the slip ring and the
brush. Low wear at high speeds and very low thermal voltages
[21].
The calibration will be done with Spider8 setup (Fig. 4), the
mV/V)” will be taken from the
increasing and decreasing the
Spider8 channel set up window. In Ch0, the full
bridge must be selected with zero loads; the tare function will
Development, Energy, Environment, Economics
ISBN: 978-960-474-253-0 76

be set in “Voltage (mV/V)”, all the results will be organized in
tables.
Fig.4. Spider8 measurement electronics
HBM supplies this type of equipment as slipping assemblies
for fitting to rotating shafts of various sizes with
brushes for separate mounting. The set contains five slip rings;
four for connection of the strain gauges and the fifth
a ground connection with the rotating shaft to prevent
interference. Slip ring assemblies (Fig. 5)
free end of a shaft can be supplied with 6 slip
[13].
Fig5. SK 6, slip ring
III. RESULTS AND DISCUSSION
A. Choosing Strain Gauge
All the required information about the strain gauge
indicated:
Gauge length = 2mm, Gauge factor = 2.05±1%
Gauge resistance = 120Ω ± 0.4.
Even though good contact materials
amount of variation of the contact resistance (contact noise) is
unavoidable with slip ring transmitters.
HBM states a contact resistance between the
the brush of “40 m Ω” with variations of
the contact resistance itself is relatively unimportant, variations
in its value are reproduced in the measuring signal
torque transducer will be connected to Spider8 which
will be connected to the computer [12]-[13]
6.
, all the results will be organized in
measurement electronics
HBM supplies this type of equipment as slipping assemblies
for fitting to rotating shafts of various sizes with two sets of
brushes for separate mounting. The set contains five slip rings;
ges and the fifth to provide
a ground connection with the rotating shaft to prevent
for mounting on the
free end of a shaft can be supplied with 6 slip rings [11]-[12]-
ISCUSSION
information about the strain gauge rea
Gauge factor = 2.05±1%
are used, a certain
amount of variation of the contact resistance (contact noise) is
ce between the slip ring and
of” < 2mΩ”. Whereas
the contact resistance itself is relatively unimportant, variations
oduced in the measuring signal. And the
connected to Spider8 which in turn,
[13], as shown in Fig.
Fig.6. Schematic of the torque transducer and its connections
To calculate the torque,
measured. For this, measuring weights
various weights will be used, which are
2, 2.5, 3, 3.5, 4 and 4.5 kg.
Weights have to be converted from
Newton (N)” as follows:
“Force (N)” = “mass (kg)” * “9.
Torque is calculated using the following formula:
Where:
F = “Force (N)”
l = “Length of the Lever (m)”.
Data will be taken three times
three series. The average of the three series
“Strain ( )”
The strain for each resistance
then be compared to the indicated strain calculated
Testing the transducer in real
the measurement of electrical power and speed.
In the Lab, the grinder will be
circuits, all instrumentation
voltage, and Spider8 will be connected to
Firstly, calibration testing
the results will be measured three times
next step.
Testing the transducer during operation
with 4kg loads of the corn used
measure the electrical power and speed.
The calibration value of “T
approximately determined, “Voltage
the line “Current (A)”, the “Electrical P
“Speed (rpm)” which will be
tachometer, will be used to read the speed during operation
optical ray is beamed directly
mounted on the bearing to read
To calculate the mechanical power the formula as shown
below can be applied:
Schematic of the torque transducer and its connections
To calculate the torque, the first strain gauge has to be
measuring weights are needed; in this case
used, which are respectively 0.5, 1, 1.5,
Weights have to be converted from “Kilogram (Kg)” to ”
“mass (kg)” * “9.81(m/sec2)”
Torque is calculated using the following formula:
(10)
.
taken three times, which will be tabulated into
The average of the three series will be calculated.
he strain for each resistance will also be calculated. It will
compared to the indicated strain calculated from (9).
real operating condition is made by
measurement of electrical power and speed.
will be connected to the electrical
, all instrumentation connections are for current and
connected to a computer.
will be conducted without load;
measured three times in preparation for the
ansducer during operation will be conducted
loads of the corn used to represent real conditions to
measure the electrical power and speed.
The calibration value of “Torque (Nm)” will be
Voltage (V)” between two phases,
the “Electrical Power (W)” and the
will be measured with a special
used to read the speed during operation. An
directly onto a small reference piece
read the shaft speed [14].
cal power the formula as shown
Development, Energy, Environment, Economics
ISBN: 978-960-474-253-0 77

· (10)
B. Setting Catman®
Express Software:
This software is associated with computer-controlled
measuring equipment, and provides a user-friendly interface
for the system functions. The software is an integral component
performing many functions, affecting every aspect of the
measurement process.
In the I/O input and output channel window, channel names
and detected channels are displayed, therefore the properties
torque, weight and time can be chosen. The setup and units
menu also appears in this window and the bridge and gauge
factors can be entered (bridge factor is 4, gauge factor is 2.05).
The setup assistant window displays the Ch0 full bridge
torque and, Ch1 full bridge against load. In the two windows
the “Torque value (Nm)” and “Weight (kg)” against the “Strain
value (mV/V)” are displayed, the testing will be done and the
results obtained.
IV. CONCLUSION
Most torque transducers use strain gauge transduction, some
use reductive transduction, and in other relatively recently
developed designs, use the difference in angular displacement
between the two ends of a torsion bar to obtain either a phase-
difference measurement (photo electrically,
electromagnetically or inductively) or a variable illumination
measurement.
A very important quantity of rotating machines is the acting
mechanical power. It can be calculated from the torque and the
shaft speed. Several kinds of torque measuring methods were
presented. There are many widely used measuring methods and
more or less standardized instruments for measuring the
rotational speed. A digital hand tachometer was chosen for
measuring speed.
Torque measurement is more complicated compared to
speed measurement. It requires a specific solution for every
application and it must be built into the machine’s shaft.
Because of its the high accuracy, relatively simple operation
and high dynamical behavior, the strain gauge sensor was
chosen for measuring torque on the rotating shaft. During the
design, the shaft was adapted to enable the application of strain
gauges. To the shaft’s end, a HBM made slip-ring assembly is
attached, connecting the rotating shaft to the standing cable and
the Spider8 measurement electronics. The HBM CATMAN-
Express software will be used during calibration and in the
actual tests.
ACKNOWLEDGMENT
This work is supported by the People’s Bureau of the Great
Socialist People’s Libyan Arab Jamahiriya, Kuala Lumpur,
Malaysia and Faculty of Engineering & Built Environment
Universiti Kebangsaan Malaysia 43600 UKM Bangi, Malaysia
and they are gratefully acknowledged.
REFERENCES
[1] H. N. Norton, Handbook of Transducers, Altadena, California, 1989. [2] K. Hoffmann, An Introduction to Measurements using Strain Gauges,
Hottinger Baldwin Messtechnik Gmbh, Germany, 1989. [3] R. Schicher and G. Wegener, Measuring Torque Correctly, Hottinger
Baldwin Messtechnik Gmbh, Germany, 2002.
[4] Case, John, Lord and Ross, T.F.Carl, Strength of Materials and Structures with an Introduction to Finite element Methods, 3rd edition,
Edward Arnold, Great Britain, 1993. [5] K. Hoffmann, The Strain Gauge a Universal Tool of the Experimental
Stress Analysis, Hottinger Baldwin Messtechnik Gmbh, Germany, 1984.
[6] K. Hoffmann, An Introduction to Strain Gauge Tech. by Practical
Experiments, Hottinger Baldwin Messtechnik Gmbh, Germany, 1986. [7] H. Thomas Courtney, Mechanical Behavior of Materials, 2nd edition, Mc
Graw-Hill Companies, Inc, Singapore, 2000.
[8] HBM Products Catalog, Hottinger Baldwin Messtechnik Gmbh, Germany, 2002.
[9] HBM Strain Gauges and Accessories Catalog, 2002, Germany.
[10] Strain Gages & Accessories at: http://www.vishay.com/brands/measurements_group/strain_gages/mm.ht
m
[11] HBM-Solutions from Sensor to Soft ware at: http://www.hbm.com/products/SEURLF/ASP/SFS/CATEGORY.3/SUB
CATEGORY.20/MM.3,33,-1/SFE/DisplayProductTable.htm.
[12] HBM-Strain Gages & Accessories at: http://www.hbm.com/Products/SEURLF/ASP/SFS/CATEGORY.5/SUB
CATEGORY.24/MM.3,24,53/SFE/DisplayProductTable.htm
[13] Measuring Strain with Strain Gauges – Tutorial – Development Library – National Instruments at:
http://zone.ni.com/devzone/conceptd.nsf/webmain/C83E9B93DE714DB0
8625686600704DB1?OpenDocument [14] T.R. Kane and D.A. Levinson,.Dynamics, Theory and Applications, 1985,
pp. 90–99.
[15] Bureau of Naval Personnel, Basic Electricity, p.114, Courier Dover Publications, 1970 ISBN 0486209733.
[16] W. Clarence. De Silva, Vibration monitoring, testing, and
instrumentation, pp.2.43-2.49, CRC Press, 2007 ISBN 1420053191. [17] W.J Fleming, “Automotive torque measurement: a summary of seven
different methods”, IEEE Trans. on Vehicular Technology, VT-31, 1982,
pp. 117-124. [18] T. Yan, B.E. Jones, R.T Rakowski, M.J. Tudor, S.P. Beeby and N.M.
White. “Thick-film PZTmetallic triple beam resonator”, Electronics
Letters, 39, 2003, pp. 982-983. [19] T. Yan, B. E Jones, R. T Rakowski, M. J.Tudor, S. P.Beeby and N. M.
White “Design and fabrication of thick-film PZT-metallic triple beam
resonators”, Sensors and Actuators A, 115, 2004 pp. 401-407. [20] Yan T., Jones B. E., Rakowski R. T., Tudor M. J., Beeby S. P. and White
N. M. “Metallic triplebeam resonant force sensor with thick-film printed
piezoelectric vibration excitation and detection mechanisms”, Sensors and Their Applications XII, Eds. S J Prosser and E Lewis, Bristol:
Institute of Physics Publishing, 2003, pp.77-82.
Development, Energy, Environment, Economics
ISBN: 978-960-474-253-0 78