4. Methods of Measurement in Geodesy - Híreksci.fgt.bme.hu/gtoth/ge/geodesy3.pdf · Methods of...
18
4. Methods of Measurement in Geodesy • astronomic determinations of Φ, Λ, A (latitude, longitude and azimuth) direction measurement to stars • gravity and gravity gradient measurements • earth tide measurements • geodetic measurements : angle (horizontal and zenith), distances, height differences • satellite observations direction, distance (laser), Doppler shift, GPS, VLBI, altimetry 4.1 Astronomic Measurements Geodetic astronomy is concerned with the determination of the astronomic latitude Φ and longitude Λ, as well as the astronomic azimuth A from observations of fixed stars; the basis for such work is spherical astronomy. These measurements are related to the quasi-inertial celestial reference system: ICRS • origin: barycentre of the solar system (Bc) • Z: mean rotation axis ( ω ) • X: mean Vernal Equinox ( ϒ ) Astronomic measurements depend on the earth’s rotation, hence a precise time system is required for such observations. 4.1.1 Observational Instruments Direction and time measurements are required for the determination of latitude, longitude, and azimuth. The instruments are either permanently installed (observatories) or set up in the field. For field measurements of first-order precision (±0.1" to ±0.3") the universal theodolite, in particular, is brought into service. It consists of a precise theodolite of very stable design, which with a few attachments can be used for astronomic observations (Fig. 4.1). Measuring accuracics of ±0.5" to ±1" may be reached when using the prism astrolabe. Here, one measures the transit times of those stars which cross the same almucantar (small circles parallel to the horizon). The constant zenith distance (usually ~ 30°) is established by a prism placed in front of the telescope. and the direction of the vertical is defined by the surface of a pool of mercury or by a compensator pendulum, Fig.4.1. DKM3-A universal theodolite
Transcript of 4. Methods of Measurement in Geodesy - Híreksci.fgt.bme.hu/gtoth/ge/geodesy3.pdf · Methods of...

4. Methods of Measurement in Geodesy • astronomic determinations of Φ, Λ, A (latitude, longitude and azimuth)
direction measurement to stars
• gravity and gravity gradient measurements
• earth tide measurements
• geodetic measurements: angle (horizontal and zenith), distances, height differences
• satellite observations
direction, distance (laser), Doppler shift, GPS, VLBI, altimetry
4.1 Astronomic Measurements
Geodetic astronomy is concerned with the determination of the astronomic latitude Φ and longitude Λ,
as well as the astronomic azimuth A from observations of fixed stars; the basis for such work is spherical
astronomy.
These measurements are related to the quasi-inertial celestial reference system: ICRS
• origin: barycentre of the solar system (Bc)
• Z: mean rotation axis (ω )
• X: mean Vernal Equinox ( ϒ )
Astronomic measurements depend on the earth’s rotation, hence a precise time system is required for
such observations.
4.1.1 Observational Instruments
Direction and time measurements are required for the determination of latitude, longitude, and azimuth.
The instruments are either permanently installed (observatories) or set up in the field.
For field measurements of first-order precision (±0.1" to ±0.3") the universal theodolite, in particular, is
brought into service. It consists of a precise theodolite of very stable design, which with a few
attachments can be used for astronomic observations (Fig. 4.1).
Measuring accuracics of ±0.5" to ±1" may be reached when using the prism astrolabe. Here, one
measures the transit times of those stars which cross the same almucantar (small circles parallel to the
horizon). The constant zenith distance (usually ~ 30°) is established by a prism placed in front of the
telescope. and the direction of the vertical is defined by the surface of a pool of mercury or by a
compensator pendulum,
Fig.4.1. DKM3-A universal theodolite

Recently, transportable zenith cameras have also been used to rapidly determine astronomic latitude and
longitude. Such an instrument consists of a camera oriented in the direction of the plumb line (focal
length = 300 to 1000 mm, relative aperture of 1:5) and which can be turned around this axis to any
azimuth. The DIADEM (Digital Astronomic Deflection Measurement System) developed jointly by
ETH Zürich and IfE Hannover is equiped with a CCD sensor and a GPS device. Measurement time for
one station is 30 minutes and the accuracy of astronomic latitude and longitude determination is better
than ±0.1".
4.2 Gravity Measurements
In these sections we treat the measurements of gravity intensity (gravity) g, the gravity gradient, and
body tides of the earth.
4.2.1 Absolute Gravity Measurements
By an “absolute” gravity measurement, we mean the determination of g from the fundamental
acceleration quantities length and time. The free-fall and the rise-fall methods, as well as the pendulum
methods are significant in this respect.
Through the integration of gz =ɺɺ for a free-fall experiment, one obtains the relation
2
002
tg
tzzz ++= ɺ (4.1)
between path z and the fall time t. The constants of integration z0 and 0zɺ represent the position and
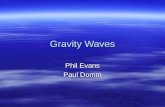
velocity of the body at 0=t . If the body falls through at least three planes (Fig. 4.2a), z0 and 0zɺ can be
eliminated.
We have
))()((
))(())((2
231213
13121213
tttttt
ttzzttzzg
−−−−−−−−
= . (4.2)
For a symmetric rise and fall (Fig 4.2b), it is sufficient to measure the crossing times t1, t2, t3, t4 at only
two planes separated by the distance ∆z. (4.1) then yields
2
23
2
14 )()(
8
tttt
zg
−−−=
∆. (4.3)
Fig.4.2. Distance-time diagram a) free-fall method b) symmetrical rise and fall method

If the relative error of a free-fall experiment is not to exceed ±10-9
(corresponding to ±1 ×10-8
ms-2
), a
falling distance of 0.5 m and a corresponding falling time of 0.3 s yield accuracy requirements of
±0.5 nm and ±0.2 ns. This can be achieved by interferometric measurements with laser light (He-Ne-
laser) and electronic time measurements.
The system developed at Joint Institute for Laboratory Astrophysics (JILA), Boulder in 1983 was
produced in a small series and is now operated by different institutions (Fig. 4.3).
With 1000 to 2000 drops distributed in runs of 300 over one or two days (according to local
microseismics), a standard deviation of ±0.02…±0.05 µms-2
is obtained for the mean value. The
accuracy of the more recently developed FG5 system is about ±0.01…±0.02 µms-2
.
4.2.2 Relative Gravity Measurements
The measurement of a difference in gravity ∆g by the direct or indirect observation of one of the two
acceleration quantities time or length keeping the other one fixed, is known as a “relative” gravity
measurement; it can be performed with considerably more ease than the “absolute” measurement of ∆g.
The (relative) spring gravimeter is based on the principle of a spring balance. The equilibrium position
of a mass m is observed as it is influenced by the acceleration of gravity and the counterforce of the
elastic spring. If gravity changes the spring length will also change in order to reach a static equilibrium
again. According to Hooke’s law, the strain is proportional to the stress for small elongations. We
differentiate between translational systems (seldom used) and rotational systems.
In a translational system (vertical spring balance), the condition of equilibrium (Fig. 4.4a) is given by
0)( 0 =−− llfmg , (4.4)
where f is the spring constant and l(l0) is the length of the spring with a load (without a load).
Differentiating (4.4) furnishes a linear relationship between the change in gravity ∆g and the observed difference in length ∆l:
lll
gl
m
fg ∆∆∆
0−== . (4.5)
In order to assess gravity changes with a relative accuracy of ±10-8
, length changes of a 0.1 m long
spring have to be determined to ±1 nm.
At the general lever spring balance the spring counterforce )( 0llf − can act under an arbitrary angle on
the lever carrying the mass m (Fig. 4.4b). The line connecting the rotation axis O with the point where
the spring is mounted deviates by an angle δ from the vertical. The equilibrium condition for the torques
reads
Fig.4.3. JILA absolute gravimeter, IfE, Hannover

0sin)sin( 0 =−
−+ αδαl
llfbdmga . (4.6)
The sensitivity of this non-linear system may be significantly improved by approximating the torques of
gravity and of the elastic spring (astatization). With a zero-length ( 00 =l ) spring, this is achieved with a
small angle δ , and 090≈α . In order to obtain the ±10-8
relative accuracy, we now need (at a = 0.1 m,
α + δ = 90°, δ = 100") the displacement to be measured with …±2 µm. Compared to the linear system the sensitivity is increased by the factor 2000.
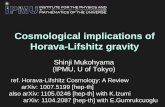
Of the many types of gravimeters developed since 1930, the most popular ones are the astatized instruments of LaCoste-Romberg (LCR), Austin, USA (Fig. 4.5)
Despite all precautionary measures, temporal variations arise in the zero reading of the gravimeter: zero drift and sudden tares. The drift is caused by the aging of the spring (long-range drifts of 0.1 to 1 µms
-2
per day), as well as uncompensated temperature fluctuations, and by elastic aftereffects produced by locking and unlocking the lever. The accuracy in the difference of gravity as observed with gravimeters
amounts to approximately ±0.1 to ±0.5 µms-2
. The uncertainty can be reduced to ±50 nms-2
by using LaCoste-Romberg gravimeters and measuring smaller gravity differences.
Shipborne and airborne gravimeters may be placed on a gyro-stabilized platform. Current airborne
gravimeters operated in helicopters provide resolutions up to 1 km and an accuracy of ±5 µms-2
. In airborne applications, field resolutions of 10 to 20 km and accuracies of a few 10 µms
-2 have been
obtained.
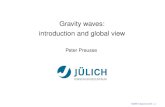
Fig.4.4. Spring balance gravimeter principle a) vertical spring balance b) general lever spring
balance
Fig.4.5. LaCoste and Romberg gravimeter model G with battery and carrying case

4.3 Gravity Gradient Measurements
The gravity gradient [2.2.5] contains local gravity field information, which may be used in corresponding computations. Gravity gradiometry may be applied in stationary or in kinematic mode.
The Eötvös torsion balance represents a stationary gravity gradiometer. It consists of two equal masses
situated at different heights and connected by a rigid system of negligibly small mass which is suspended by a torsional thread (Fig. 4.6). Due to the unequal gravity accelerations at A and B, the
suspended beam experiences a torsional moment. We introduce a local astronomic system (origin at the center of mass S) and assume a linear variation of gravity around the area of the apparatus. For equilibrium of the torques, we then have
0)()(2 0 =−−− ϑϑτyWxWm xy . (4.7)
Here, m is the mass at A and B, τ is the torsional constant of the thread, and 0ϑϑ − is the angle of
rotation of the suspended beam with respect to the initial position 0ϑ (untwisted position). By expanding
Wx and Wy about S in Taylor series, it can be derived that the field quantities Wyy –Wxx , Wxy , Wxz , Wyz as
well as 0ϑ can be determined by measuring ϑ in five different azimuths. An accuracy of ±1 to ±5×10-9
s-2
can be attained for the field quantities.
Spring gravimeters can be used to approximate grad g by measuring small gravity differences.
Gravity gradiometers are currently being developed particularly for use in aircraft and artificial earth satellites. They employ different numbers and configurations of accelerometer pairs. We mention the
Falcon system developed by BHP Biliton (actually 4 such systems are operational worldwide) with an accuracy of ±3×10
-9 s
-2. The satellite gradiometer developed by ONERA, France for the GOCE mission
of ESA (Gravity and Ocean Circulation Experiment) will be launced in 2008.
4.4 The Measurement of Earth Tides
Variations in the intensity of gravity which are caused by tides can be measured by gravimeters, other effects such as fluctuations in the direction of the plumb line are determined by tiltmeters, and crustal deformations are measured using extensometers.
A spring-type field gravimeter may be used as an earth-tide recording gravimeter. For this purpose it has to be equipped with a low-pass filter, a reconrding unit, and a quartz clock. Special tidal gravimeters (Askania Gs25) have great stability and a small measuring range.
Fig.4.6. Eötvös torsion balance principle

In the superconducting gravimeter, the force of gravity acting on a proof mass is compensated by a magnetic counterforce. A high long-term stability is achieved by the superconducting state of the
system. Vertical displacements of the mass are monitored by a capacitive detector and compensated through a feedback system. Instrumental long-term drift remains very small; the accuracy in the short-
period tidal band is better than ±1 nms-2
. The principle of the GWR superconducting gravimeter can be seen on Fig. 4.7.
Tiltmeters are designed as horizontal and vertical pendulums, and as water-tube levels. The fluctuations
in the direction of the plumb line with respect to the earth’s surface are determined from its two mutually perpendicular components (NS, EW).
Strain measurements are made with extensometers (strainmeters). The strain, which depends on the
tides, is on the order to 10-8
corresponding to 0.1 µm/10 m: therefore, an instrumental resolution of 1 ×10
-10 is required. Metal and quartz tube extensiometers, as well as invar wires with lengths of 10 to
30 m are used for these purpose; laser interferometers allow lengths up to 1 km. Generally one end is firmly attached to the earth’s crust; the crustal displacements are measured at the other end.
4.5 Terrestrial Geodetic Measurements
Horizontal angles, distances, zenith angles, and height differences obtained from leveling are measured on the earth’s surface. These measurements determine the relative spatial positions of the surface points.
4.5.1 Atmospheric Refraction
In practically all terrestrial geodetic measurements, as in astronomic measurements and in satellite
observations, electromagnetic waves serve as carriers of a signal. As they propagate through the atmosphere, they experience changes in velocity and the curvature of the path (refraction). If we neglect
horizontal refraction, then the coefficient of refraction κ (ratio of the curvature of the light ray to the earth’s curvature) describes the vertical refraction:
r
R=κ , (4.8)
(R = radius of curvature of the ellipsoidal normal section). Vertical refraction affects distance measurements, zenith angles, and geometric leveling, and has to be accounted for by proper curvature
Fig.4.7. GWR superconducting gravimeter principle, after GWR Instruments, San Diego, California.

reductions. When reducing zenith angles one requires the angle of refraction δ (= angle between the tangent to the path of the light and the straight line joining the point of observation and the target). It is given by integrating 1/r or κ along the path. Regarding the light path as a circular arc, we have
kR
s
r
s
22==δ . (4.9)
k is designated the effective coefficient of refraction. Under average conditions (during the day with clear skies), there is r = 8R, k = 0.13.
4.5.2 Horizontal and Zenith Angle and Distance Measurements
The horizontal angle is defined as the angle measured in the horizontal plane of the local astronomic
system [3.2.2] between two vertical planes. It is formed by the difference in directions to the target points which determine the vertical planes. A theodolite can be used for measuring directions. Electronic
theodolites have telescopes and graduated circles similar to optical theodolites. The microscopes are replaced by optical-electronic scanning systems (resolution about 0.5”). A microprocessor controls and
evaluates the instrument’s operation. By combination with an electronic distance measurement unit, an electronic theodolite can be extended to a total station.
The zenith angle is measured with the vertical circle of a theodolite. The observed zenith angle refers to the local direction of the plumb line and the curved ray of light.
Distance measurements establish the scale of geodetic networks. In electromagnetic distance
measurements light waves (λ = 0.36 to 0.78 µm) and microwaves (λ = 1 cm to 10 cm) serve as carriers
of the measuring signal. The travel time of the signal serves as measure for the distance. Time measurement can be performed by pulse or phase comparison methods. Due to its high accuracy, the phase comparison techniques are favored today.
The calibration of electronic distance measuring devices consists of checking the modulation frequency with a frequency meter, and determining the instrumental constants (zero correction and possible cyclic errors of electro-optical devices) on short (≤ 1 km) calibration lines.
4.5.3 Leveling
In geometric leveling, the differences in height are determined using horizontal lines of sight between points in close proximity of each other (for precise leveling, the station spacing is ≤ 30…40 m).
Leveling is conducted with a leveling instrument (a level) and with the aid of leveling rods. The line of sight is brought into the horizontal using a bubble in conjunction with a tilting screw or automatically by
a compensator (optical-mechanical part with a gravity pendulum as main component). For leveling of highest accuracy, precision levels are used. The measuring rods in use are 3 m invar rods with two opposing and staggered graduations.
Summing the observed height differences δn between the control points P1 and P2 yields the leveled height difference
∑=2
1
12 nn δ∆ (4.10)
∆n depends on the path taken, since the level surfaces are not parallel. A definitive determination of height is possible only by considering the gravity g that is, by turning to potential differences ∆W. Then we have
∑∫ −≈−=−=2
1
2
1
1212 ngdngWWW δ∆ . (4.11)
The accuracy of precise leveling depends on personal, instrumental, topographical and atmospherical influences. For a 1 km double-run leveling, on can attain a standard deviation of ±0.3 to 1.0 mm.

4.6 Satellite Observations
In this group of measurements, one utilizes targets and sensors which are not attached to the earth’s
body. Artificial earth satellites possess the greatest significance in this respect. Observations of distant cosmic object (extragalactic radio sources) are also included.
4.6.1 The Unperturbed Motion of the Satellite
For the time being, we regard the motion in a gravitational field of an earth whose structure is spherically symmetric.
The mass of the satellite can be neglected in comparison to the earth’s mass M. From the derivative of the gravitational potential V, we obtain the equation of motion
rr
GMVgrad
rr
2−==ɺɺ . (4.12)
r is the geocetric position vector; the dots denote differentiation with respect to time.
According to Kepler’s laws, the satellite moves in an elliptical orbit. One focal point of the ellipse (with semimajor axis a, and first eccentricity e) coincides with the center of gravitation (= center of mass of
the earth). In the orbital system of Fig. 4.8 the position of the satellite is described by the distance r from
the center of mass and the true anomaly ν (= geocentric angle between the directions to the satellite and to perigee). Using the eccentric anomaly E as an auxillary quantity, we obtain
)cos1( Eear −= , eE
Ee
−−
=cos
sin1tan
2
ν . (4.13)
We introduce Kepler’s third law via the mean (angular) velocity (mean motion)
3
a
GMn = (4.14)
and the mean anomaly
)( TtnM −= (4.15)
which increases linearly with time t. T is the epoch of the passage through perigee, the closest approach
to the earth. E can then be computed iteratively using Kepler’s equation:
EeEM sin−= . (4.16)
The orbital system is transformed into the space-fixed equatorial system by the rotations of Ω (= right
ascension of the ascending node, RAAN), i (= inclination of the orbital plane with respect to the
equatorial plane), and ω (= argument of perigee), Fig. 4.9. The geocentric position vector is found to be
Fig.4.8. Orbital system of the satellite.

+
Ω++Ω+
Ω+−Ω+
=
=
i
i
i
rr
sin)sin(
coscos)sin(sin)cos(
cossin)sin(cos)cos(
sin
sincos
coscos
νωνωνωνωνω
δαδαδ
r . (4.17)
with
νcos1
)1( 2
e
ear
+−
= . (4.18)
With equations (4.14) through (4.18) the orbit of the satellite is given by the 6 Keplerian elements a, e,
Ω, i, ω, T.
4.6.2 The Perturbed Motion of the Satellite
The actual orbit of the satellite departs from the Keplerian orbit due to the effects of various “disturbing
forces” of gravitational and nongravitational type. The disturbing forces cause variations with time in
the orbital elements (orbital perturbations) of secular, long, and short periodic nature. The orbit can be
viewed as the envelope of Keplerian ellipses (osculating ellipses) which are given at each instant by the actual orbital elements.
In order to account for the complete gravitationn of the earth, the gravitational potential of a spherically
symmetric earth must be amended by the "disturbing function" R:
Rr
GMV E += . (4.19)
R contains the harmonic coellicients Clm, Slm, (l ≥2) of the spherical harmonic expansion of V. The
spherical coordinates r, ϑ , λ are replaced by the orbital elements; we thereby arrive at
),;,,,,,( lmlm SCMieaRR ωΩ= . (4.20)
Next, we substitute (4.19), (4.20) into (4.12) and by considering non-gravitational perturbing forces R’
obtain the equation of motion
'grad2
RRrr
GM++−=
rrɺɺ . (4.21)
This vectorial differential equation or the corresponding system of scalar sccond-order differential
equations can be converted to an equivalent system of first-order differential equations. The differential
equations can be solved numerically or analytically. The numerical integration is based on a standard
Fig.4.9. Satellite orbit and equatorial system.

orbit computation method. A numerical mathematics procedure is applied to the equation of motion
including all disturbing effects. Analytical integration uses the Lagrangian equations for the variation of
the orbital elements in response to the disturbing function.
The orbit of the satellite experiences secular and periodic perturbations (amplitude of up to 100 m and
more for a 3h-orbit) due to lunisolar gravitation, which affects the earth and the satellite unequally.
Earth and ocean tides affect low—flying satellites.
Nongravitational orbital perturbations are caused primarily by atmospheric drag and solar radiation
pressure. Air drag brakes the satellite, finally changing its orbit into a circular path and then into a
spiralling motion, leading to its fall to the earth. The perturbations depend on the velocity of the satellite, on the atmospheric density, and on the effective cross-sectional area to mass ratio.
4.6.3 Measurements to Satellites
Measurements to satellites may include direction measurements, laser distance measurements and Doppler frequency shift measurements.
Until about 1970, optical-photographical measurements of direction prevailed. The satellite is depicted,
as a result of a photographic exposure, with the fixed stars in the plane ol a film or plate. Observations
included those of light flashes from active satellites, reflected laser light, and reflected sunlight with ballistic, astronomic and orbital cameras.
Laser distance measurements to satellites (Satellite Laser Ranging SLR) are feasible when the satellite is
equipped with laser reflectors. After measuring the time of propagation of the laser pulse as it travels
from the emitter to the reflector, and back, the distance is computed. A laser distance measuring system
(third generation) consists of at Nd:YAG laser (yttrium-aluminium-garnet crystal doped with
neodymium ions), the transmitting and receiving optics (optical telescopes), the mechanical mounting,
optical-electronic system for detecting thc laser pulses, an electronic time counter, and an electronic
control system with process computer. The laser pulse is emitted through the transmitting optics; at the
same instant, thc time counter begins to record the time. The reflected pulse collected by the receiving
telescope is channeled, upon amplification in at secondary-electron multiplier. to the time counter. The
laser and receiving telescope are mounted such that they can automatically follow the satellite according to the preculculated orbit.
The accuracy of laser distance measurements depends primarily on the pulse width, the stability of the
photomultiplier, and the time resolution. Fourth and fifth generation laser systems can achieve several mm accuracy with only a single laser pulse.
For Doppler measurements, a transmitter aboard a satellite S emits, at time t, a signal in the ultrashort-
wavelength range and with a constant frequency fs (Fig. 4.10).
The observer receives the frequency fE at time t + ∆t. Due to the relative velocity sɺ of the satellite, fE is
displaced with respect to fS (Doppler frequency shift). We have
sc
fff S
SE ɺ−= , (4.22)
Fig.4.10. Doppler measurements.

where c is the mean velocity of electromagnetic waves. The frequency shift
sc
ffff S
SE ɺ−=−=∆ (4.23)
is proportional to sɺ ; a reversal in the sign of ∆f occurs at the time of closest approach of the satellite to
the observing station ( sɺ = ∆f = 0).
The continuously transmitted frequency fS is amplified by the receiving equipment and compared to a
constant reference frequency f0 which is generated by the receiver. The difference f0 – fE (beat
frequency) is integrated by an electronic counter over the time intervals )()( 1122 tttt ∆+−∆+ , etc. This
yields
)( 12
0
012
0
12 ttf
ffcN
f
css S −
−−=− . (4.24)
The range difference can then be computed from the output of the counter (Doppler count) N12 and the
difference in time 12 tt − .
The most important application had been made with the Navy Navigation Satellite System (NNSS or
TRANSIT System. It was operational from 1964 to 1995 generally on a basis of 4 to 6 Transit satellites
and was replaced by the GPS system. Primarily established for US Navy navigation, it became available
for the public in 1967. The orbit planes of the TRANSIT satellites were evenly distributed in longitude
Because of the earth's rotation, a satellite was visible at least every two hours (equatorial region). Two
carrier waves were continuously transmitted, with 150 and 400 MHz frequency. The accuracy of the receiver’s position was ±10-30 m for a single pass from 10-15 measured Doppler counts.
4.6.4 Global Navigation Satellite Systems (GNSS)
NAVSTAR/GPS
The NAVSTAR/GPS (Navigation with Time and Ranging/Global Positioning System) is a
radionavigation system based on satellites. GPS system is formed by three great blocks: 1) Space segment, 2) Control segment and 3) User segment.
1) Space segment
Space segment main functions are, from instructions sent by the control segment, to provide an atomic
time reference, generate radio frequency (RF) pseudorandom signals, and store and retransmit the navigation message.
Space segment is formed by a satellite constellation of at least 24 satellites, arranged in 6 orbital planes,
with an inclination of 55 degrees in relation to the equator. Orbits are nearly circular, with eccentricity
less than 0.02, a semi-major axis of 26000 km and a period of 12 sidereal hours (11h 58min 2sec). The
present configuration allows users to have a simultaneous observation of at least 4 satellites from any
point on the Earth surface at any time, with an elevation above the visible horizon of the viewer greater
than 15 degrees (Fig. 4.11).
Satellites have structures and mechanisms in order to keep themselves in orbit, communicate with the
control segment, and emit signals to receivers. One of the critical aspects of the GPS system are satellite
clocks. For this reason, satellites are equipped with atomic clocks (rubidium, cesium) which have a very high stability. The following group of satellites have been developed
• Block I, Navigation Development Satellites. Between 1978 and 1985, eleven satellites of this
kind were launched. They weighted about 845 kg and had a planned averaged life of 4.5 years,
although some of them lasted up to 10. They were capable of giving posi- tioning service for 3 or 4 days without any contact with the control center.
• Block II and IIA, Operational Satellites. In present days, they are still operating. They consist of
28 satellites in total that were launched from 1989. They weight about 1500 kg and have a
planned average life of 7.5 years. From 1990, an improved version was used, block IIA
(advanced), with capability of mutual communication. They are able to supply positioning

service for 180 days with no contact with the control segment. However, under normal operating mode, they must communicate daily.
• Block IIR, Replacement Operational Satellites. From 1997, these satellites are being used as
spare satellite of block II. It is formed by a set of 20 satellites, although it could be increased by 6
more. They weight about 2000 kg and have a planned average lifespan of 10 years. These
satellites will have the capability to autonomously determine their orbits and generate their own
navigation message. They will be able to measure distances between them and transmit
observations to other satellites or to the control segment. A satellite of this kind, completely
developed, must be capable of operating about half a year without any support of control
segment and no degradation in ephemeris accuracy. It is expected that some of them could be
equipped with hydrogen masers.
• Block IIF, Follow-on Operational Satellites. Their launch is predicted as of 2001. Their theoretical averaged life is of about 10 years, and will have inertial navigation systems.
GPS satellites are identified in different ways: by their position in the orbital plane [every satellite has a
place (1, 2, 3, ...), inside the six orbits - A, B, C, D, E or F], their NASA reference number, their
international identification number, PRN code (pseudorandom noise code), and their space vehicle
number (SVN).
GPS signals
Every satellite transmits signals centered on two frequencies lying in the L band. These frequencies are
derived from a fundamental frequency f0 =10,23 MHz (with a relation 154/120 ), generated by its atomic
clocks with a stability about 10−13
. L1 = 154 · 10.23 MHz = 1575.42 MHz, L2 = 120 · 10.23 MHz =
1227.60 MHz. The fact that the satellites emit in two different frequencies allows the user to cancel one
of the main error sources: ionospheric refraction. It is due to the ionosphere, which acts as a scattering
media for GPS signals. The following types of PRN codes and messages are modulated over the two
carriers:
• Coarse/Acquisition code [C/A(t)], it is also known as civilian code. This sequence is repeated
every millisecond and at a velocity, or ”chip-rate”, of 1 Mbps, which is equivalent to a wavelength of 293.1 m. It is modulated only over L1.
• Precision code [P(t)], it is reserved for military use and authorized civilian users. The sequence
is repeated every 266 days (38 weeks) and a weekly portion of this code is assigned to every
satellite, called PRN sequence. Its velocity or ”chip-rate” is 10 Mbps, equivalent to a wavelength of 29.31 m and modulated over both carriers L1 and L2.
Fig.4.11. GPS satellites orbit the Earth on 6 orbital planes.

• Navigation message [D(t)], it is modulated over both carriers at 50 bps, reporting information
about ephemeris and satellite clock drifts, ionospheric model coefficients, constellation status,
etc.
2) Control segment
The control segment is the responsible for GPS system functioning. Its basic functions are:
• To control and maintain the status and configuration of the satellite constellation.
• To predict ephemeris and satellite clock evolution.
• To keep GPS time scale (through atomic clocks).
• To update navigation messages of all satellite.
It is also responsible for Selective Availability, S/A, activation in signal transmission. The control
segment consists of five Monitor Stations located in Hawaii, Colorado Springs, Ascension Island in
South Atlantic, Diego Garcia in Indian Ocean, and Kwajalein in North Pacific; a master control station
located in Colorado Springs, and three ground antennas transmitting data to the satellites in Ascension,
Diego Garcia, and Kwajalein.
3) User segment
The user segment is composed by GPS receivers. Their main function is to receive GPS signals,
determine pseudoranges, and solve navigation equations in order to obtain their coordinates and provide
a very accurate time. Basic elements of a generic GPS receiver are an antenna with pre-amplification, a
radio frequency section, a microprocessor, an intermediate-precision oscillator, a feeding source, a some
memory for data storage, and an interface with the user (Fig. 4.12). The calculated position is referred to antenna phase center.
GPS time is the reference time used in GPS applications. The origin epoch is 00:00 Universal
Coordinated Time (UTC midnight) of 5th to 6th of January of 1980 (6d.0).
From 1987, GPS uses the World Geodetic System WGS-84, developed by USA Defense Department, which is a unified terrestrial reference system for position and vector referencing.
Satellite Navigation systems are deliberately constructed in such a way that from any point on Earth, at
least 4 satellites are “visible”. Thus despite inaccuracy on the part of the receiver clock and resulting time errors, a position can be calculated to within an accuracy of approx. 5 – 10 m.
The issue of GPS accuracy can be complex. An ideal description of GPS accuracy will have reference to
several factors. The most common factors that should be included in a complete description of accuracy include the following:
• Required occupation time
• Type of data recorded (phase or pseudorange)
• Type of processing (phase or pseudorange)
• Environmental conditions
• Maximum allowable PDOP
Fig.4.12. Basic scheme of a GPS receiver.

• Minimum allowable signal strength
• Maximum allowable distance between base and rover receivers
• Horizontal accuracy versus vertcal accuracy
GLONASS
GLONASS is an abbreviation for a GNSS system currently operated by the Russian Defense Ministry.
The designation GLONASS stands for Global Navigation Satellite System. The program was first
started by the former Soviet Union, and is today under the auspices of the Commonwealth of
Independent States (CIS).
The first three test-satellites were launched into orbit on October 12, 1982. The most important specifications of this system were:
• 24 planned satellites (21 standard + 3 reserve satellites). This number has never been achieved.
The relatively short lifespan of the individual satellites of 3 to 4 years hampered the completion
of the system.
• 3 orbital levels with an angle of 64.8° from the equator (this is the highest angle of all the GNSS systems and allows better reception in polar regions)
• Orbital altitude of 19,100 km
• Orbital period of 11h 15.8min
• Every GLONASS satellite transmits two codes (C/A and P-Code) on two frequencies. Every
satellite transmits the same codes (PRN), but at different frequencies in the vicinity of 1602MHz and 1246 MHz. These assigned frequencies should be changed in the course of the next years
The completed GLONASS system will require 24 functional satellites. Due to political instability in the
former Soviet Union and many other delays and failures, there were as of August 18, 2006 only 14
operational satellites in orbit. The CIS plans to have its system functioning by the end of 2008. Three
replacement satellites were successfully launched on December 25, 2005. Two of these three satellites
are of the M series, which should have a lifespan of 7-8 years. These new satellites transmit 2 civilian
signals. After 2007 the first of the K series of satellites are to be launched. These are expected to have a lifespan of 10-12 years and transmit three civilian signals.
GALILEO
GALILEO is the European GNSS system. The European Union (EU), in close cooperation with the
European Space Agency (ESA), is developing this. GALILEO will consist of a constellation of the
satellites on 3 circular orbitals at an altitude of 23,616 km above the Earth. These satellites are to be
supported by a worldwide network of ground stations.
The key arguments for introducing GALILEO were:
• To attain independence from the USA.
• To increase the accuracy of positioning. GALILEO is planned to be more accurate than GPS. It
is expected that the open service, OS will provide a precision of approximately 4 to 15m. Critical
security services should have a precision of 4 to 6m. Sensitivity to multipath reception will also
be reduced. This improvement will be achieved through the application of BOC modulation.
GPS will also introduce BOC when it is modernized.
• To have a purely civilian navigation system. GALILEO is being conceived and implemented
according to civilian criteria; however, it also provides necessary security functions. Contrary to
the militarily oriented GPS, GALILEO guarantees the function of individual services. •
Providing more services. GALILEO will offer five different functions. In comparison, GPS at
the moment offers only two. In the course of modernization, the number of GPS services for civilian applications will also increase.
• Offer a Search and Rescue Function. Search and Rescue (SAR) functions are already being offered by other organizations. New with GALILEO is that an alarm can be acknowledged.

• Increased Security through Integrity Messages. GALILEO will be more reliable in that it
includes an integrity message. This will immediately inform users of errors that develop. On top
of this is a guarantee of availability. For the Open Service there will be neither the availability
guarantee nor the integrity messages. These services are only available through EGNOS9.
• Creation of Employment. Experts estimate that by the year 2020, the European satellite system GALILEO will generate between 130,000-80,000 jobs
• Attain GNSS Know-How. Most manufacturers of satellite navigation systems are currently
located in the USA. Satellites and satellite accessories, navigation receivers, measuring
devices, etc. are predominantly developed and marketed from outside of Europe. With
GALILEO, Europe should acquire expertise and provide the domestic industry with a
sustainable growth in competence.
• To improve the worldwide coverage of satellite signals. GALILEO will offer better reception
than GPS to cities located in higher latitudes. This is possible because the GALILEO satellites have orbits at an angle of 56° from the equator as well as an altitude of 23,616km.
Projected GALILEO services are:
• Open Service, OS provides free signals for the determination of position and time
• Commercial Service, CS is envisaged for market applications with higher performance demands
• Safety of Life Service, SoL is envisaged primarily for transportation applications for which an
impairment of the navigation system without adequate warning could result in a life-threatening
situation
• Public Regulated Service, PRS will be available to such clients as police and fire departments and border patrols. Access to this service is restricted and controlled by a civilian agency.
• Search and Rescue, SAR will be used by humanitarian search and rescue services
4.6.5 Very Long Baseline Interferometry (VLBI)
Extragalactic radio sources (quasars = quasistellar radio sources, radio galaxies) emit waves in the cm-
to dm-range which are detected by large antennas (radio telescopes) that are used in radio astronomy. A
receiving system (Fig 4.13) consists of two widely separated (a few 1000 to 10 000 km) radio telescopes
P1 and P2, and thus has a high resolution (≈ 0.001") due to the long baseline b (resolution ≈ wave-
length/telescope diameter).
The radio wave arrives at P2 with a phase difference ∆φ(t ) with respect to P1:
πνττλ
πϕ 22 ==∆c
. (4.25)
Here, c is the mean wave velocity, λ(ν) is the wavelength (frequency) of the received signal, and τ is the
time delay which the wave requires to travel the distance:
srrsb ⋅−−=⋅−=∆ )( 12s , (4.26)
with b = baseline vector between the radiotelescopes, and s = unit vector in the direction to the radio
source. With
cs τ=∆ (4.27)
we obtain the observation equation
sb ⋅−=c
t1
)(τ , (4.28)
for deriving the baseline b from τ.

This method is known as Very Long Baseline Interferometry (VLBI). The accuracy of the baseline
component determinations (24 h observations, 10 quasars) is a few cm. The mean values of baselines,
computed over few years, have standard deviations of ± few mm.
4.6.6 Satellite Altimetry
The method of satellite altimetry is based on a satellite-born altimeter which transmits radar pulses in
the vertical direction to the earth’s surface. These are reflected perpendicularly by the surface of the
ocean (Fig. 4.14). Then the measurement of the propagation time furnishes the height ha of the satellite
above the instantaneous sea surface. The radar altirneters operate in the 14 GHz frequency range (2 cm
wave-length) with pulse lengths of about 10 ns to few ns, and a resolution of 1 m to a few cm.
If the satellite’s ellipsoidal height h is calculated from its ephemeris, we have
)( SSTNhha +−= , with si hhSST δδ += . (4.29)
After the successful experiments on the Skylab mission (1973), the first global survey with a radar
altimeter was accomplished by the GEOS 3 satellite (1979). The average over 2 seconds of
measurements (footprint spacing of ~ 15 km) is accompanied by an accuracy of ±0.5 m. This measuring
accuracy has been increased in the SEASAT l mission (1978) to ±0.1 m by changing to a shorter pulse
length (1982). The results of the first 18 months of the US Navy GEOSAT mission (±3 cm precision, 7
km ground track interval) remained classified. The radar altimeters of the ERS-1 (1991) and the TOPEX-POSEIDON (1992) satellites delivered accuracies better than 10 cm.
Fig.4.13. Very long baseline interferometry.
Fig.4.14. Satellite Altimetry.

5. Methods of Evaluation in Geodesy
The problem in global geodesy is to determine the figure of the earth and the dominant features of the external gravity field. as well as to derive the mean earth ellipsoid.
In this section, we treat, in the first place, the methods of evaluation which have been developed for the
various groups of measurement: the astrogeodetic methods use astronomic and the gravimetric methods
employ gravity measurements, both of them in connection with terrestrial geodetic measurements. The
methods of satellite geodesy are based on satellite observations. These methods have different
advantages and disadvantages; combining them is an important problem of geodetic theory. Evaluation
methods developed for global geodesy are also employed for solving regional geodetic problems, sometimes with admissible simplifications.
5.1 Astrogeodetic Methods
Observations for the astrogeodetic computations include astronomic latitudes and longitudes,
astronomic azimuths, as well as horizontal angles, distances. zenith angles, and leveled height
differences. The gravity intensity is required for reduction purposes in the determination of the geoid
and the quasigeoid. and also the orthometric and normal heights. The x,y,z-system or, upon introducing a reference ellipsoid, the φ, λ, h-system serves as a reference system for spatial computations.
5.1.1 Deflection of the Vertical, Geoid Undulation, Height Anomaly
With the exception of distances, the observed quantities refer to the earth's gravity field. The geodetic
computations are simplified with the introduction of the normal gravity field and the ellipsoidal
reference system. By forming the (small) differences between actual and normal gravity field quantities (disturbing quantities) we obtain linear relations between observations and unknown parameters.
To the point P in the actual gravity field (on a level surface W = const.) we assign a point Q in the
normal gravity field (on a level surface U = const.). The angle between the surface normals at P
(direction of the actual plumb line) and at Q (direction of the normal plumb fine) is designated the (total)
deflection af the vertical (DOV) Θ, which is a vector quantity.
We make the following distinctions:
1. The deflection of the vertical Θ, defined by Helmert as the angle at the surface of the earth between
the directions of the plumb line and the ellipsoidal normal through P (Fig. 5.1). The point Q0 on the
ellipsoid is assigned to the point P as defined by the ellipsoidal normal. The actual or normal gravity fields between Q0 and P are not required.
Fig.5.1. Surface deflection of the vertical.

2. The deflection of the vertical Θ0, defined by Pizzetti as the angle at the geoid between thc directions
of the plumb line and the ellipsoidal normal through the point P0 on the geoid (Fig. 5.2). P0 is
assigned to the surface point P by the curved plumb line. The ellipsoid should possess the same
potential W0 as the geoid. The height difference between the ellipsoid and the geoid is designated the
geoid undulation N (geoid height).
3. The deflection of the vertical ΘN, defined by Molodenski as the angle at the surface of the earth
between the directions of the plumb line at P and the surface normal of that spheropotential surface
which has the same potential WP as the geopotential surface through P. The points Q, thus
determined, establish the telluroid. The height difference between the telluroid and the physical
surface of the earth is known as the height anomaly ζ.
Fig.5.2. Deflection of the vertical ΘN after Molodenski, deflection of the vertical Θ0, after
Pizzetti, height anomaly ζ, geoid undulation (geoid height) N.