3-DOF BICOPTER•High noise levels in signal measurements → LCD οθόνη •Performance...
16
NATIONAL TECHNICAL UNIVERSITY OF ATHENS MECHANICAL ENGINEERING DEPARTMENT MECHATRONIC SYSTEMS 3-DOF BICOPTER Supervisor : Professor E. Papadopoulos, (NTUA). ΔΠΜΣ «AUTOMATION SYSTEMS» 2011-12 TEAM 3 Stathopoulos Christos Papanikolaou Thomas Kampras Nikos
Transcript of 3-DOF BICOPTER•High noise levels in signal measurements → LCD οθόνη •Performance...

NATIONAL TECHNICAL UNIVERSITY OF ATHENS
MECHANICAL ENGINEERING DEPARTMENT
MECHATRONIC SYSTEMS
3-DOF BICOPTER
Supervisor : Professor E. Papadopoulos, (NTUA).
ΔΠΜΣ «AUTOMATION SYSTEMS» 2011-12
TEAM 3
Stathopoulos Christos Papanikolaou Thomas
Kampras Nikos

2 Mechatronic Systems- 2012
Contents
• System Description
• Modeling - Control
• Implementation
• Problems - Improvements

3-DOF BICOPTER
Mechatronic Systems- 2012 3

Unmanned Aerial Vehicles ( UAV ) • Quadrotors
• Helicopters
4 Mechatronic Systems- 2012
Idea

• 3 revolute joints
• 2 propeller motors
• 3 angle sensors
• Underactuated System
• Microcontroller
• Workspace
5 Mechatronic Systems- 2012
System Description

• Physical system analysis – Dynamic Equations
• Linearization around operation position – 1st Lyapunov method
• Linearization position:
6 Mechatronic Systems- 2012
Modeling (1)
1 1 3 2 2 1 2
2 2 3 2 1 2
3 3 3 1 2
sin cos
cos
Ι θ (θ ) (θ ) l (F F )
Ι θ (θ ) l (F F )
Ι θ l (F F )
1 2 3, , 0,0,0
0 0
( , )
( , ) ( , )
x x
x f x u
f x u f x ux x u Ax Bu
x u

7 Mechatronic Systems- 2012
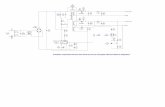
Modeling (2)
11
22
33
11 2 21
2 222
3 3 33
3 3
0 00 0 0 1 0 0
0 00 0 0 0 1 0
0 00 0 0 0 0 1
0 0
0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
c
Ax x
l mgl l
I I
l l
I I
1
2
1
2
3
1
2
3
1 0 0 0 0 0
0 1 0 0 0 0
0 0 1 0 0 0
B
u
u
u
x
C
y
6
6
rank Ob ή
rank Cb έ

8 Mechatronic Systems- 2012
Modeling (3) • Modeling of motor and propeller system F = λ∙u + b
• Measuring λ

• Underactuated: 2 inputs – 3 degrees of freedom • Control of the Yaw angle through the Roll angle • 3 PID
9 Mechatronic Systems- 2012
Control

10 Mechatronic Systems- 2012
Simulation • Control Signals • System response

• Aluminum Frame • Light • Easy to manipulate
• Potensiometer:
• angle measurement • enough prescision • simple use • parallel usage as joints • low cost
11 Mechatronic Systems- 2012
Implementation (1)

12
Implementation (2) • Brushless DC motors – (high power/mass, durable, simple to operate)
• ESC Controllers – Rpm Control– PWM
• Microcontroller Arduino Mega : • Atmel AVR, 8bit, 16Mhz • Measurements – Control Law – Motor Control signals • Comunication via USB with the PC User Interface • Simple to program. • Open Source – community support.
Mechatronic Systems- 2012

• Signal Plotting – Command Box • Processing – Open Source, easy to create graphics. • Serial Command protocol (control and debugging)
13 Mechatronic Systems- 2012
INTERFACE - COCKPIT

• High noise levels in signal measurements → LCD οθόνη
• Performance degrading due to battery discharging → power unit • Motors large vibrations → 2 x power units 5Α
• Unstable behavior → Tuning of the PID gains → Tuning the delay of the control loop → Digital Filter • Target Step transition → smooth transitions
14 Mechatronic Systems- 2012
Problems Faced

15 Mechatronic Systems- 2012
Future Improvements
• More robust construction
• Replacement of the potentiometers with Encoders
• Nonlinear – Adaptive Control
• Fly-by-wire Control

End of Presentation
16 Mechatronic Systems- 2012