![arXiv:1707.07162v1 [q-fin.ST] 22 Jul 2017 · Lagrange regularisation approach to compare nested data sets and determine objectively nancial bubbles’ inceptions G. Demos y1, D. Sornettey\](https://static.fdocument.org/doc/165x107/5ed0782d21104e0e02433ad9/arxiv170707162v1-q-finst-22-jul-2017-lagrange-regularisation-approach-to-compare.jpg)






γλώσσες
Σελίδες
Νομικός

Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Geostatistical Modeling for Large Data Sets
Whitney Huang
Department of StatisticsPurdue University
October 28, 2014
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Outline
Motivation
MethodsCovariance taperingLow–rank approximationLikelihood approximationGaussian Markov random field approximation
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Gaussian process (GP) geostatisticsModel:
Y (s) = µ(s) + η(s) + ε(s), s ∈ S ⊂ Rd
where
µ(s) = XT (s)β, {η(s)}s∈S ∼ GP (0,C (·, ·))
C (s, s′) = σ2ρθ (‖s− s′‖), and ε(s) ∼ N(0, τ2) ∀s ∈ SLog-likelihood:Given data Y = (Y (s1), · · · ,Y (sn))T
ln(β,θ, σ2, τ2) ∝ −12log∣∣Σ(θ, σ2) + τ2In
∣∣− 1
2(Y− XTβ)T
[Σ(θ, σ2) + τ2In
]−1(Y− Xβ)
where Σ(θ, σ2)i ,j = σ2ρθ(‖si − sj‖), i , j = 1, · · · , n
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
“Big n Problem” in geostatistics
I Modern environmental instrument has produced awealth of space–time data ⇒ n is big
I Evaluation of the likelihood function involves factorizinglarge covariance matrices that generally requires
I O(n3) operationsI O(n2) memory
I Modeling strategies are needed to deal with large spatialdata set.
I parameter estimation ⇒ MLE, BayesianI spatial interpolation ⇒ KrigingI multivariate spatial data, spatio-temporal data
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
“Big n Problem” in geostatistics
I Modern environmental instrument has produced awealth of space–time data ⇒ n is big
I Evaluation of the likelihood function involves factorizinglarge covariance matrices that generally requires
I O(n3) operationsI O(n2) memory
I Modeling strategies are needed to deal with large spatialdata set.
I parameter estimation ⇒ MLE, BayesianI spatial interpolation ⇒ KrigingI multivariate spatial data, spatio-temporal data
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
“Big n Problem” in geostatistics
I Modern environmental instrument has produced awealth of space–time data ⇒ n is big
I Evaluation of the likelihood function involves factorizinglarge covariance matrices that generally requires
I O(n3) operationsI O(n2) memory
I Modeling strategies are needed to deal with large spatialdata set.
I parameter estimation ⇒ MLE, BayesianI spatial interpolation ⇒ KrigingI multivariate spatial data, spatio-temporal data
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Modeling strategies in the literature
I Covariance tapering (Furrer et al. 06, Kaufman et al.08, Du et al. 09)
I Low–rank approximation (Cressie & Johannesson 08,Banerjee et al. 08)
I Likelihood approximation (Vecchia 88, Stein 04)
I Gaussian Markov random field approximation (Rue &Tjelmeland 02, Rue & Held 05, Lindgren et al. 11)
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Modeling strategies in the literature
I Covariance tapering (Furrer et al. 06, Kaufman et al.08, Du et al. 09)
I Low–rank approximation (Cressie & Johannesson 08,Banerjee et al. 08)
I Likelihood approximation (Vecchia 88, Stein 04)
I Gaussian Markov random field approximation (Rue &Tjelmeland 02, Rue & Held 05, Lindgren et al. 11)
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Modeling strategies in the literature
I Covariance tapering (Furrer et al. 06, Kaufman et al.08, Du et al. 09)
I Low–rank approximation (Cressie & Johannesson 08,Banerjee et al. 08)
I Likelihood approximation (Vecchia 88, Stein 04)
I Gaussian Markov random field approximation (Rue &Tjelmeland 02, Rue & Held 05, Lindgren et al. 11)
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Modeling strategies in the literature
I Covariance tapering (Furrer et al. 06, Kaufman et al.08, Du et al. 09)
I Low–rank approximation (Cressie & Johannesson 08,Banerjee et al. 08)
I Likelihood approximation (Vecchia 88, Stein 04)
I Gaussian Markov random field approximation (Rue &Tjelmeland 02, Rue & Held 05, Lindgren et al. 11)
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Outline
Motivation
MethodsCovariance taperingLow–rank approximationLikelihood approximationGaussian Markov random field approximation

Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
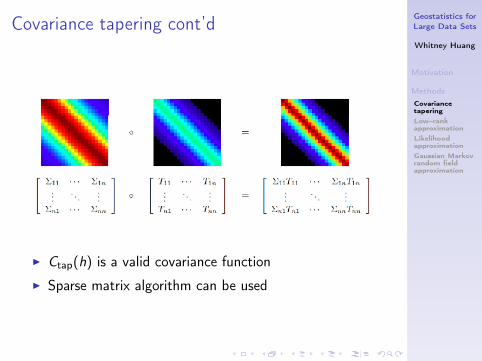
Covariance tapering (Furrer et al. 06)We replace the C (‖h‖) by
Ctap(h; γ) = ρtap(h; γ) ◦ C (h)
where ρtap(h; γ) is an isotropic correlation function withcompact support (ρtap(h) = 0 if h ≥ γ) and ◦ denotes theSchur product
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Covariance tapering cont’d
I Ctap(h) is a valid covariance function
I Sparse matrix algorithm can be used
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Low–rank approximation
Hierarchical Representation (assume zero mean spatialprocess)
Y = η + ε, ε ∼ MVN(0,Σε)
η = Hα+ ξ, ξ ∼ MVN(0,Σξ)
α ∼ MVN(0,Σα)
where α = (α1, · · · , αp)T such that p � n and H ismapping from the latent process, α, to the true spatialprocess of interest, η. Σε and Σξ and diagonal.
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Low–rank approximation cont’d
To carry out the spatial interpolation (i.e. kriging) ofη(s0)|{Y (si )}ni=1 one need to compute(
HΣαHT + V
)−1
where V = Σε + Σξ.
Sherman–Morrison–Woodbury formula(A + BCD)−1 = A−1 − A−1B
(C−1 + DA−1B
)−1DA−1
In the case of low–rank model, we have(HΣαH
T + V)−1
= V−1−V−1H(Σ−1α + HTV−1H
)−1HTV−1
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Fixed Rank Kriging (Cressie & Johannesson 08)
Y = Xβ + ZW∗ + ε
Let W ∗ = {w(s∗i )pi=1} be be latent variables at p � n knownknots {s∗i }
pi=1 and Z (·) be a known basis function
The fixed rank kriging is equivalent to the following low rankmodel
Y (s) = X(s)β +
p∑j=1
Z (s− s∗j )Wj + ε(s)
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Gaussian Predictive Process (Banerjee et al. 08)
Use a model
Y (s) = X(s)Tβ + Hα(s) + ε(s)
to approximate the original spatial process
Y (s) = X(s)Tβ + η(s) + ε(s)
Knots: {s∗1, · · · , s∗p} where p � n
⇒ α = {α(s∗i )}pi=1, H(θ) =[Cov(si , s∗j ;θ)
]T[Σα]−1

Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Likelihood approximation (Vecchia 88)
Partition the observation vector Y into sub–vectorY1, · · · ,Yb and let Y(j) = (YT
1 , · · · ,YTj )T
The exact likelihood
p(Y;β,θ) = p(Y1;β,θ)b∏
j=2
p(Yj |Y(j−1);β,θ)
Approximate the exact likelihood by replacing Y(j−1) by asub–vector S(j−1) of Y(j−1)
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
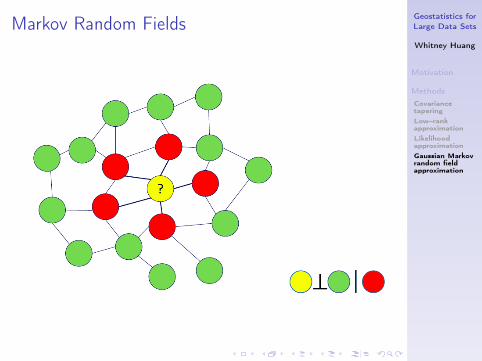
Markov Random Fields
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Gaussian Markov Random Fields (GMRF)
DefinitionLet the neighbors to a point i be the points Ni that are“close" to i . A Gaussian random field X ∼ N(µ,Σ = Q−1)
that satisfies
p(Xi |Xj , j 6= i) = p(Xi |Xj : j ∈ Nj)
is a Gaussian Markov random field (GMRF) with Qij = 0 iffXi ⊥ Xj |X−ij
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Remarks: GP vs. GMRF in geostatistical modeling
I +: GP model is widely used in modeling continuouslyindexed spatial data in which the covariance functioncharacterizes the process properties
I –: Inference involves factorizing covariance matrices
I +: GMRF model is computationally efficient due to thesparse precision matrix
I –: Only for discretely indexed spatial data
Main idea of GMRF approach:
GP︸︷︷︸inference
SPDE⇐⇒ GMRF︸ ︷︷ ︸computation
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Remarks: GP vs. GMRF in geostatistical modeling
I +: GP model is widely used in modeling continuouslyindexed spatial data in which the covariance functioncharacterizes the process properties
I –: Inference involves factorizing covariance matrices
I +: GMRF model is computationally efficient due to thesparse precision matrix
I –: Only for discretely indexed spatial data
Main idea of GMRF approach:
GP︸︷︷︸inference
SPDE⇐⇒ GMRF︸ ︷︷ ︸computation
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Remarks: GP vs. GMRF in geostatistical modeling
I +: GP model is widely used in modeling continuouslyindexed spatial data in which the covariance functioncharacterizes the process properties
I –: Inference involves factorizing covariance matrices
I +: GMRF model is computationally efficient due to thesparse precision matrix
I –: Only for discretely indexed spatial data
Main idea of GMRF approach:
GP︸︷︷︸inference
SPDE⇐⇒ GMRF︸ ︷︷ ︸computation
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Remarks: GP vs. GMRF in geostatistical modeling
I +: GP model is widely used in modeling continuouslyindexed spatial data in which the covariance functioncharacterizes the process properties
I –: Inference involves factorizing covariance matrices
I +: GMRF model is computationally efficient due to thesparse precision matrix
I –: Only for discretely indexed spatial data
Main idea of GMRF approach:
GP︸︷︷︸inference
SPDE⇐⇒ GMRF︸ ︷︷ ︸computation
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Remarks: GP vs. GMRF in geostatistical modeling
I +: GP model is widely used in modeling continuouslyindexed spatial data in which the covariance functioncharacterizes the process properties
I –: Inference involves factorizing covariance matrices
I +: GMRF model is computationally efficient due to thesparse precision matrix
I –: Only for discretely indexed spatial data
Main idea of GMRF approach:
GP︸︷︷︸inference
SPDE⇐⇒ GMRF︸ ︷︷ ︸computation
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
Remarks: GP vs. GMRF in geostatistical modeling
I +: GP model is widely used in modeling continuouslyindexed spatial data in which the covariance functioncharacterizes the process properties
I –: Inference involves factorizing covariance matrices
I +: GMRF model is computationally efficient due to thesparse precision matrix
I –: Only for discretely indexed spatial data
Main idea of GMRF approach:
GP︸︷︷︸inference
SPDE⇐⇒ GMRF︸ ︷︷ ︸computation
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
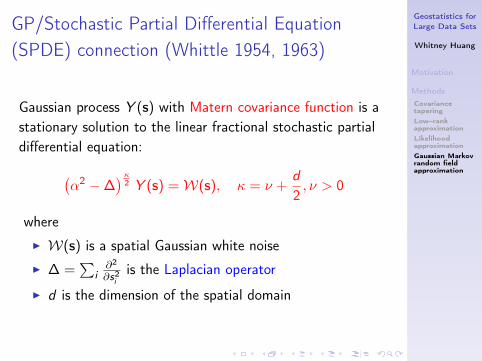
GP/Stochastic Partial Differential Equation(SPDE) connection (Whittle 1954, 1963)
Gaussian process Y (s) with Matern covariance function is astationary solution to the linear fractional stochastic partialdifferential equation:(
α2 −∆)κ
2 Y (s) =W(s), κ = ν +d
2, ν > 0
where
I W(s) is a spatial Gaussian white noise
I ∆ =∑
i∂2
∂s2iis the Laplacian operator
I d is the dimension of the spatial domain
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
An explicit link between GP and GMRF via SPDE(Lindgren et al. 11)
I Establish the link between GP with Matérn covariancefunction (with ν + d
2 are integers) and GMRF
I (Bayesian) inference can be done by using Integratednested Laplace approximation (INLA) approach
I The extensions to nonstationary models, models onmanifolds, multivariate models, spatio-temporal modelsare relatively easy
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
An explicit link between GP and GMRF via SPDE(Lindgren et al. 11)
I Establish the link between GP with Matérn covariancefunction (with ν + d
2 are integers) and GMRF
I (Bayesian) inference can be done by using Integratednested Laplace approximation (INLA) approach
I The extensions to nonstationary models, models onmanifolds, multivariate models, spatio-temporal modelsare relatively easy
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
An explicit link between GP and GMRF via SPDE(Lindgren et al. 11)
I Establish the link between GP with Matérn covariancefunction (with ν + d
2 are integers) and GMRF
I (Bayesian) inference can be done by using Integratednested Laplace approximation (INLA) approach
I The extensions to nonstationary models, models onmanifolds, multivariate models, spatio-temporal modelsare relatively easy
Geostatistics forLarge Data Sets
Whitney Huang
Motivation
MethodsCovariancetaperingLow–rankapproximationLikelihoodapproximationGaussian Markovrandom fieldapproximation
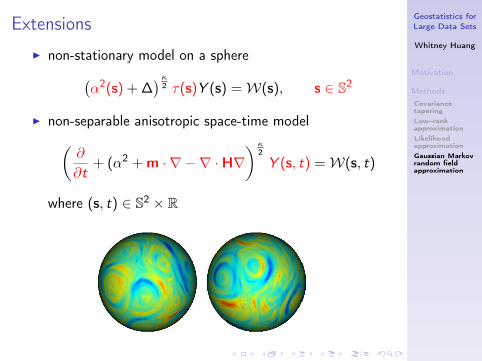
ExtensionsI non-stationary model on a sphere(
α2(s) + ∆)κ
2 τ(s)Y (s) =W(s), s ∈ S2
I non-separable anisotropic space-time model(∂
∂t+ (α2 + m · ∇ −∇ ·H∇
)κ2
Y (s, t) =W(s, t)
where (s, t) ∈ S2 × R
Geostatistics forLarge Data Sets
Whitney Huang
AppendixFor FurtherReading
For Further Reading I
H. Rue, and L. HeldGaussian Markov Random Fields: Theory andApplications.Chapman & Hall/CRC, 2005.
S. Banerjee, A. E. Gelfand, A. O. Finley, and H. SangGaussian Predictive Process Models for Large SpatialData SetsJRSSB, 70:825–848, 2008.
N. A. C. Cressie, and G. JohannessonFixed Rank Kriging for Very Large Spatial Data SetsJRSSB, 70:209–226, 2008.
Geostatistics forLarge Data Sets
Whitney Huang
AppendixFor FurtherReading
For Further Reading II
J. Du, H. Zhang, and V. S. MandrekarFixed–Domain Asymptotic Properties of TaperedMaximum Likelihood EstimatorsThe Annals of Statistics, 37:3330–3361, 2009.
R. Furrer, M. G. Genton, and D. W. NychkaCovariance Tapering for Interpolation of Large SpatialDatasetsJournal of Computational and Graphical Statistics,15:502–523, 2006.
C. G. Kaufman, M. J. Schervish, and D. W. NychkaCovariance Tapering for Likelihood–Based Estimation inLarge Spatial Data SetsJournal of the American Statistical Association,103:1545–1555, 2008.
Geostatistics forLarge Data Sets
Whitney Huang
AppendixFor FurtherReading
For Further Reading III
Lindgren, F., Rue, H., & Lindström, J.An explicit link between Gaussian fields and GaussianMarkov random fields: the stochastic partial differentialequation approach.JRSSB, 73:423–498
H. Rue, and H. TjelmelandFitting Gaussian Markov Random Fields to GaussianField.Scandinavian Journal of Statistics, 29:31–49
M. L. Stein, Z. Chi, and L. J. WeltyApproximating Likelihoods for Large Spatial Data SetsJRSSB, 66:275–296, 2004.
Geostatistics forLarge Data Sets
Whitney Huang
AppendixFor FurtherReading
For Further Reading IV
A. V. VecchiaEstimation and Model Identification for ContinuousSpatial ProcessesJRSSB, 50:297–312, 1988.
Top Related