
X Goly sors Z δ - sasovits.hu · Dr. Zsiga Zoltá n: CNC gépek útmérő rendszerei Analóg...
11
Dr. Zsiga Zoltá n: CNC gépek ú tmérő rendszerei Analóg ú tmérő k 15 3. Analó g útmé rő k Az analóg ú tmérő k é rzékelő je az elmozdulá ssal ará nyos, folytonos jelet ad, melyet a CNC vezé rlé sek szá má ra minden estben digitá lis jellé kell alakí tani. Az é rzé kelő k mű ködé si elve tö bbfé le lehet. A lineá ris és a forgó potenciomé terek az elmozdulá ssal ará nyos ellená llá s- vá ltozá s, mí g a rezolverek é s az induktoszinok a villamos indukció elvé n mű kö dnek. 3.1. Potenciomé terek A legegyszerű bb abszolú t analó g ú tmérő eszkö zö k, a potenciomé terek az elmozdulá ssal ará nyos ellená llá s vá ltozá st haszná ljá k fel jelké pzé sre. Kö zvetlen méré sre lineá ris potenciomé terek, mí g kö zvetett mé ré sre a forgó potenciomé terek alkalmasak. 19. á bra A 19. á bra a potenciomé terek alkalmazá si lehető ségeit mutatja. Kö zvetlen mé ré s eseté n a lineá ris potenciomé ter csú szká ja á ltal meghatá rozott feszültség az elmozdulá ssal ará nyos: max 0 x x x U U = A d ú tegysé gnek megfelelő felbontá shoz az analóg-digitá l á talakí tót (A/D) 1 x i egé sz max = d 2 log bitszá mú ra kell vá lasztani. A kö zvetett méré shez alkalmazható forgó potenciomé ter esetében hasonló feladatokat kell megoldani azzal a kiegé szí té ssel, hogy a potenciomé ter maximá lis elfordulá si szö gé t a legnagyobb szá nelmozdulá shoz kell rendelni. Ezt az illesztő hajtómű hajtóviszonyá nak megfelelő megvá lasztá sá val lehet el é rni, amely a 19. á bra alapjá n: helyzettel ará nyos digit á lis jel Szá n Goly ó sors ó Illesztő hajtómű Motor Z 1 Z 2 h δ X Lineá ris potenciomé ter x max U 0 U x D A Forgó potenciomé ter PDF created with FinePrint pdfFactory trial version http://www.fineprint.com
Transcript of X Goly sors Z δ - sasovits.hu · Dr. Zsiga Zoltá n: CNC gépek útmérő rendszerei Analóg...

Dr. Zsiga Zoltá n: CNC gépek útmérő rendszerei Analóg útmérő k
15
3. Analó g útmérő k Az analóg útmérő k érzékelő je az elmozdulá ssal ará nyos, folytonos jelet ad, melyet a CNC vezérlések szá má ra minden estben digitá lis jellé kell alakítani. Az érzékelő k mű ködési elve tö bbféle lehet. A lineá ris és a forgó potenciométerek az elmozdulá ssal ará nyos ellená llá s-vá ltozá s, míg a rezolverek és az induktoszinok a villamos indukció elvén mű kö dnek. 3.1. Potenciométerek A legegyszerű bb abszolút analó g útmérő eszkö zö k, a potenciométerek az elmozdulá ssal ará nyos ellená llá s vá ltozá st haszná ljá k fel jelképzésre. Kö zvetlen mérésre lineáris potenciométerek, míg kö zvetett mérésre a forgó potenciométerek alkalmasak.
19. á bra
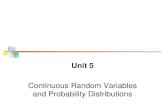
A 19. á bra a potenciométerek alkalmazá si lehető ségeit mutatja. Kö zvetlen mérés esetén a lineá ris potenciométer csúszká ja á ltal meghatá rozott feszültség az elmozdulá ssal ará nyos:
max
0x xxUU ⋅=
A δ útegységnek megfelelő felbontá shoz az analóg-digitá l á talakítót (A/D)
1x
iegész
max +
=
δ2log bitszá múra kell vá lasztani.
A kö zvetett méréshez alkalmazható forgó potenciométer esetében hasonló feladatokat kell megoldani azzal a kiegészítéssel, hogy a potenciométer maximá lis elfordulá si szö gét a legnagyobb szá nelmozdulá shoz kell rendelni. Ezt az illesztő hajtómű hajtóviszonyá nak megfelelő megvá lasztá sá val lehet elérni, amely a 19. á bra alapjá n:
helyzettel ará nyosdigitá lis jel
Szá nGolyósorsó
Illesztőhajtómű
Motor
Z1
Z2h
δ
X
Lineá rispotenciomé ter
xxmax
U0
Ux
DA
Forgópotenciomé ter
PDF created with FinePrint pdfFactory trial version http://www.fineprint.com

Dr. Zsiga Zoltá n: CNC gépek útmérő rendszerei Analóg útmérő k
16
max
max
x2h
⋅⋅
=π
ϕk , ahol ϕmax a potenciométer legnagyobb elfordulá si szö ge
radiá nban kifejezve. A potenciométerek útmérésre való alkalmazá sá nak jellemző je, hogy a felbontóképesség az A/D á talakító csatornaszá má tól függ, de meghatá rozóak a potenciométer minő ségi jellemző i is (linearitá s, hő mérséklet stabilitá s, érzékenység, á tmeneti ellená llá s vá ltozá s a csúszka érintkezésénél, stb.). Szerszá mgépek esetében nem haszná ljá k ö ná lló útmérő ként a potenciométereket csak esetleg má s útmérő kkel kombiná lva. Má s eszkö zö knél, pl. nyomtatók, plotterek esetében az alkalmazá suk inká bb lehetséges, mert itt elő nyö s a viszonylagos olcsósá guk, s minő ségi jellemző ik a feladatnak jobban megfelelnek. 3.2. Rezolver A szerszá mgépek, robotok pozicioná ló egységeiben a leggyakrabban alkalmazott szö gelfordulá st mérő analóg útmérő k a rezolverek. A villamos indukció elvén mű kö dnek, ezt mutatja a 20. á bra.
20. á bra
A rezolver kétfá zisú á llórésze kettő , egymá ssal 900-os szö get bezá ró S1 és S2 tekercsbő l á ll. A mérés sorá n a forgórész R tekercsében a szö ghelyzettel ará nyos jellemző jű feszültség induká lódik. Legyenek az á llórész tekercsek gerjesztő feszültségei:
( )αω
ω
+⋅=
⋅=
tsinUUtsinUU
22S
11S
ahol ω a vivő kö rfrekvencia, α pedig a gerjesztő feszültségek kö zö tti fá ziseltérés.
S2
R
ϕ
ϑ
US2
UR
Φ2
Φ1
Φ
S1
US1
ϕ0
PDF created with FinePrint pdfFactory trial version http://www.fineprint.com

Dr. Zsiga Zoltá n: CNC gépek útmérő rendszerei Analóg útmérő k
17
A 20. á bra jelö léseit figyelembe véve a forgórészben induká lódó feszültség: ( )ϕϕ sinUcosUkU 2S1SR +⋅⋅= , ahol k a csatolá si tényező Figyelembe véve, hogy a gerjesztő feszültségek ω=2πf kö rfrekvenciá ja á llandó, az induká lt feszültség amplitúdója, vagy a fá zisa alkalmas a mért elmozdulá s leképzésére. A gerjesztő feszültségek megfelelő megvá lasztá sá val a rezolver amplitúdó -analó g (α=0), illetve fázis-analó g (α=900) kapcsolá sban üzemeltethető . 3.2.1. Amplitúdó -analó g kapcsolású rezolverek Vá lasszuk az á llórész tekercsek gerjesztő feszültségeit az alá bbiak szerint a 20. á bra jelö léseit haszná lva: az amplitúdók legyenek
002
001
sinUUcosUU
ϕ
ϕ
⋅=
⋅=
ahol U0 a feszültség amplitúdója, φ 0 a kívá nt célhelyzetet kijelö lő szö g, s ezzel a fá zistekercsek gerjesztő feszültségei:
tsinsinUUtsincosUU
002S
001S
ωϕ
ωϕ
⋅⋅=
⋅⋅=
Az US1 és US2 feszültségek azonos fá zishelyzetű ek, az S1, S2 tekercsek a térben 900-os
szö get zá rnak be egymá ssal, ezért az á llórészben egy a φ 0 irányba mutató, f frekvenciá val lü ktető á lló fluxus jö n létre (Ф ). A forgórész tekercsében induká lódó feszültség, UR a 20. á brá n vá zoltak alapjá n:
( )
( ) tsincosUkUtsinsinsincoscosUkU
00R
000R
ωϕϕ
ωϕϕϕϕ
⋅−⋅⋅=
⋅⋅+⋅⋅=
Behelyettesítve a
ϕϕϑ −= 0 ö sszefüggést a forgó részben indukált feszü ltség az alá bbi szerint írható:
tsin2
sinUkU 0R ωϑπ
⋅
−⋅=
A 21. á bra a fenti egyenlet szerint az UR forgórész feszültség vá ltozá sá t mutatja a rotor szö gelfordulá sa (φ ) illetve a célhelyzettő l (φ 0) való elmaradá s (ϑ ) függvényében. Az induká lt feszültség akkor vá lik zérussá , ha a rotor a célhelyzet irá nyá val 900-os szö get zá r be, vagyis
20π
ϕϕ ±= illetve 2π
ϑ ±= .
PDF created with FinePrint pdfFactory trial version http://www.fineprint.com

Dr. Zsiga Zoltá n: CNC gépek útmérő rendszerei Analóg útmérő k
18
21. á bra
A gerjesztő feszültségek célhelyzetnek megfelelő amplitúdójá t egy alkalmas elektronika á llítja elő . A forgórészben induká lt feszültség a méréstartomá nyon belül a kijelö lt célhelyzettő l való elmaradá ssal ará nyos, tehá t a rezolver hibajel képző ként mű kö dik. Ebben a kapcsolá sban a méréstartomá ny a még megfelelő linearitá s mellett kö rülbelül +/-600, tehá t a leképezhető elmozdulá s egy rezolver alkalmazá sa esetén csupá n néhá ny milliméter. Két rezolver alkalmazá sá val má r nagyobb elmozdulá sok is mérhető ek a megfelelő pontossá ggal. Egy ilyen kö zvetett, abszolút, analó g mérési megoldá st mutat a 22. á bra.
22. á bra Két rezolver alkalmazá sakor az ún. ”durva” rezolver a teljes elmozdulá si tartomá nyban mér. Az illesztő hajtómű kd hajtóviszonyá t úgy kell meghatá rozni, hogy a szá n teljes elmozdulá sa sorá n a ”durva” rezolver forgórészének szö gelfordulá sa a méréstartomá nyá nak megfelelő en 600 legyen, vagyis:
X6hk
ebbő b3
kh2X
d
dd
=
==⋅⋅ LLπ
ϕπ
UR
f
q
q=p/2sinwt
-600
Méréstartomá ny600
ϕ d "Durva"rezolver
ϕ f "Finom"rezolver
kf
kd
US1
US1
US1US2
US2
US2
U0cosϕ 0
U0sinϕ 0
sinω t
URfURd
X
Szá n
h
δ
Motor
PDF created with FinePrint pdfFactory trial version http://www.fineprint.com

Dr. Zsiga Zoltá n: CNC gépek útmérő rendszerei Analóg útmérő k
19
Jelö ljük a rezolver mérési bizonytalansá gá t, vagy analóg felbontóképességét ∆ϕR-rel. Ezzel a durva rezolverrel mérhető legkisebb elmozdulá s (∆X):
d
R
k2h
X⋅
⋅=
πϕ∆
∆
A ”finom” resolver illesztő hajtóviszonyá t a mérendő legkisebb útegység (δ),és a rezolver bizonytalansá gá nak (∆ϕR) ismeretében kell meghatá rozni. A hajtóviszony értéke:
δπ
ϕ∆ϕ∆
πδ
⋅⋅
==⋅⋅2
hkésk
h2 R
fRf LL
A finom resolverrel leképezhető elmozdulá s (∆Xf):
f
f k6hX⋅
=∆
A rezolverek illesztése akkor megfelelő , ha a finom rezolver méréstartomá nyá ra leképezhető elmozdulá s nagyobb, mint a durva rezolverrel mérhető legkisebb elmozdulá s, vagyis:
∆Xf > ∆X Az elmozdulá s függvényében a hibajelek vá ltozá sá t a 23. á bra mutatja.
23. á bra
Az á bra alapjá n az abszolút mérés folyamata a kö vetkező : Az elektronika a célhelyzet függvényében meghatá rozza a rezolverek gerjesztő feszültségeihez a ϕ0f = ϕ0d = ϕ0 célhelyzeti szö geket. A mozgá s sorá n a finom rezolver tö bb fordulatot tehet, míg a durva rezolver elfordulá sa +/-600 –on belül marad. A célhelyzet elő tt legfeljebb ∆Xf tá volsá gra a mérő rendszer á tkapcsol a finom rezolverre, amely a célig az elmozdulá st az útegységnek megfelelő felbontá ssal méri.
X
X
szá n-elmozdulá s∆X f ∆X f
URf
URd
Cé lhelyzet Cé lhelyzet
URf URd
PDF created with FinePrint pdfFactory trial version http://www.fineprint.com

Dr. Zsiga Zoltá n: CNC gépek útmérő rendszerei Analóg útmérő k
20
Nagy elmozdulá sok mérése egy rezolver felhaszná lá sá val ciklikusan abszolút kapcsolá sban lehetséges. Ebben az esetben az á llórész tekercsek gerjesztő feszültségeinek amplitúdója nem á llandó, hanem azt a vezérlés folyamatosan vá ltoztatja az elő írt mozgá si sebességnek megfelelő en. Természetesen ekkor biztosítani kell, hogy a rezolver forgórész elmaradá si szö ge (ϑ ) az eredő fluxus vektor pillanatnyi helyzetétő l mindig kisebb legyen a rezolver méréstartomá nyá ná l, 600-ná l. A 24. á bra a ciklikusa abszolút kapcsolá st mutatja.
24. á bra
Az á llórész tekercsek feszültsége:
( )( ) tsintsinUU
tsintcosUU
m02S
m01S
ωω
ωω
⋅⋅=
⋅⋅=
ahol ωm a rezolver forgórészének a mért mozgá s sebességébő l szá mított szö gsebessége. Az induká lt feszültség (URC):
( ) ( )( )( ) tsintcosUkU
tsinsintsincostcosUkU
m0RC
mm0RC
ωϕω
ωϕωϕω
⋅−⋅⋅=
⋅⋅+⋅⋅=
Behelyettesítve a
ϕωϑ −= tm ö sszefüggést a forgó részben indukált feszü ltség az alá bbi szerint írható:
tsin2
sinUkU 0RC ωϑπ
⋅
−⋅=
Az egyenletbő l lá tható, hogy a ciklikusan abszolút kapcsolá s is hibajel képző az abszolút méréshez hasonlóan, csak a célpont kijelö lése a statikussal szemben itt dinamikus. Az induká lt feszültség jellege itt is a 21. á brá n bemutatottnak megfelelő .
S2
R
ϕ
ϑ <6 0 0
US2
UR
Φ2
Φ 1
Φ
S1
US1
ω m
PDF created with FinePrint pdfFactory trial version http://www.fineprint.com

Dr. Zsiga Zoltá n: CNC gépek útmérő rendszerei Analóg útmérő k
21
A kö zvetett, ciklikusan abszolút, amplitúdó -analó g mérés vá zlatá t a 25. á bra mutatja.
25. á bra
Az URC forgórész feszültség a pillanatnyi célhelyzettő l való elmaradá ssal ará nyos hibajel. A vezérlés alapjel képző egysége generá lja folyamatosan az elmozdulá s parancsot, melybő l a mérő rendszer á llítja elő a folyamatosan vá ltozó amplitúdójú gerjesztő feszültségeket, melynek ω m kö rfrekvenciá ja a szá nsebesség függvénye:
Cszm kh
2v πω = ,
ahol vsz a szá n mozgá si sebessége, kC pedig a rezolver illesztő hajtómű nek az inkrement illesztés alapjá n meghatá rozott hajtóviszonya:
δπ
ϕ∆⋅⋅
=2
hk R
C
A ciklikusan abszolút amplitúdó-analóg kapcsolá sú rezolver méréstartomá nyá ra leképezhető szá nelmozdulá s:
C
C k6hX⋅
=∆ .
A rendszer akkor mű kö dik helyesen, ha a szá nmozgató pozícioná ló rendszer kö vetési hibá ja a legnagyobb sebességnél sem nagyobb, mint a méréstartomá nyra leképezhető elmozdulá s, ΔXC.
ϕ rezolver
kc
X
Szá n
h
δ
Motor US1
US2
URC
US1
US2
U0cosω mt
U0sinωmt
sinω t
PDF created with FinePrint pdfFactory trial version http://www.fineprint.com

Dr. Zsiga Zoltá n: CNC gépek útmérő rendszerei Analóg útmérő k
22
3.2.2. Fázis-analó g kapcsolású rezolverek A rezolverek má sik jellegzetes kapcsolá si módja az ún. fázis-analó g kapcsolá s. Ekkor az á llórész tekercsek gerjesztő feszültségeinek fá zisszö ge 900, tehá t:
tcosUUtsinUU
02S
01S
ω
ω
⋅=
⋅=
ezzel az á llórészben egy ω szö gsebességgel forgó , U0 amplitúdójú gerjesztésvektor keletkezik (26. á bra).
26. á bra
A forgórészben induká lódó feszültség amplitúdója á llandó, csak a fázisa függ a forgórész szö ghelyzetétő l.
( )
( )ϕω
ϕωϕω
+⋅=
⋅+⋅⋅=
tsinUkUsintcoscostsinUkU
0Rf
0Rf
Ebben a kapcsolá sban a rezolver méréstartomá nya +/-1800. A 27. á bra a feszültség és fá zis viszonyokat mutatja. Az S1 tekercs US1 gerjesztő
feszültségéhez képesti fá zishelyzete a rotor feszültségnek a φ szö ggel ará nyos, vagyis a mechanikai szö g villamos szö gként képző dik le.
Egy rezolverrel egy egyszerű fá zisanalóg kapcsolá sban is korlá tozott a mérhető elmozdulá s nagysá ga (csak néhá ny mm). Tö bb rezolvert alkalmazva, hasonlóan, mint az amplitúdó-analóg kapcsolá sná l (lá sd 22. á bra), abszolút analó g rendszert lehet létrehozni.
S2US2
Φ2
Φ1
Φ
S1
US1
ω
R
URf
PDF created with FinePrint pdfFactory trial version http://www.fineprint.com

Dr. Zsiga Zoltá n: CNC gépek útmérő rendszerei Analóg útmérő k
23
27. á bra
Egy rezolverrel és megfelelő elektroniká val itt is létrehozható a ciklikusan
abszolút, analó g mérő rendszer, amit szoká s a nö vekményes mérő rendszerek kö zé sorolni, mert a dinamikus célhelyzet kijelö lés nö vekményes jelfeldolgozá si eljá rá son alapul (szá mlá lá s).
Vá ltoztassuk az á llórész feszültségek fá zisá t folyamatosan, vagyis legyenek az á llórész feszültségek rendre:
( )( )( )( )
( ) ttttcosUUttsinUU
m0
002S
001S
⋅=
+⋅=
+⋅=
ωϕ
ϕω
ϕω
ahol ω m a szá n mozgá si sebességébő l szá mítható. A forgórészben induká lt feszültség: ( ) ( )( )tttsinUkU 00Rfc ϕϕω −+⋅⋅= Ezt a jelet ö sszehasonlítva az tsinUU 0REF ω⋅=
referencia jellel a két jel fá ziskülö nbsége a pillanatnyi helyzeti hibajellel ará nyos: ( ) ( ) ( )ttt 0 ϕϕϑ −= A feszültség és fá zis viszonyokat a 28. á bra mutatja, míg a 29. á brá n a mérő rendszer egyszerű sített felépítési vá zlata lá tható:
f
US1
UR
wt
PDF created with FinePrint pdfFactory trial version http://www.fineprint.com

Dr. Zsiga Zoltá n: CNC gépek útmérő rendszerei Analóg útmérő k
24
28. á bra
29. á bra A rezolverek forgórészében induká lódott feszültséget á ltalá ban egy beépített forgó transzformá tor segítségével csatoljá k ki a csúszógyű rű k alkalmazá sá nak elkerülése érdekében. A transzformá tor primér tekercse a forgórésszel együtt forog, a szekunder tekercs pedig az á llórészbe kerül beépítésre. A 30. á bra ennek vá zlatá t mutatja. A 31. á brá n egy megvalósítá s lá tható, ahol jól megfigyelhető a forgó transzformá tor beépítése is. Egy rezolver fényképét a 32. á bra mutatja.
ϕ rezolver
kc
X
Szá n
h
δ
Motor US1
US2
URC
US1
US2
U0sin(ω t+φ 0( t) )
Cé lhelyzettelará nyos fá zis
Fá zisössze-
hasonl ító
U0sinω tReferencia
fá zis
helyzeti hibá val ará nyos hibajel
wtf0
f
q
URef
UR
US1
wt
PDF created with FinePrint pdfFactory trial version http://www.fineprint.com

Dr. Zsiga Zoltá n: CNC gépek útmérő rendszerei Analóg útmérő k
25
30. á bra
31. á bra
32. á bra
PDF created with FinePrint pdfFactory trial version http://www.fineprint.com


![2D Convolution/Multiplication Application of Convolution Thm. · 2015. 10. 19. · Convolution F[g(x,y)**h(x,y)]=G(k x,k y)H(k x,k y) Multiplication F[g(x,y)h(x,y)]=G(k x,k y)**H(k](https://static.fdocument.org/doc/165x107/6116b55ae7aa286d6958e024/2d-convolutionmultiplication-application-of-convolution-thm-2015-10-19-convolution.jpg)






![Four-Point DFTweb.eecs.utk.edu/~mjr/ECE315/Miscellaneous/DFTAndDTFT...The DFT of x[n] is k0123 X[k]373.7782+j9.53558−j9−11.7782−j2.4645 k4567 X[k]−13−11.7782+j2.46458+j93.7782−j9.5355](https://static.fdocument.org/doc/165x107/5eb67d4a1e0e1e7997265cd1/four-point-mjrece315miscellaneousdftanddtft-the-dft-of-xn-is-k0123-xk3737782j953558aj9a117782aj24645.jpg)




![Length x Width 1200 mm x 600 mm fileTemperature I SC α [%/K] +0.02 Temperature V OC β [%/K] -0.24 Temperature P MPP γ [%/K] -0.25 under STC. IMPP, VMPP, ISC, VOC are within ±10%](https://static.fdocument.org/doc/165x107/5e1d3c19cb4e5d331a3e2963/length-x-width-1200-mm-x-600-mm-i-sc-k-002-temperature-v-oc-k-024.jpg)


