WIKI Álgebras-Hodge-teoremas
236
Contenidos Artículos Álgebra de Borel 1 Compacidad local 2 Espacio compacto 2 Paul Halmos 4 Espacio separable 6 Espacio métrico 7 Σ-álgebra 10 Álgebra de conjuntos 12 Anillo de conjuntos 14 Espacio de Sóbolev 15 Teoría de la medida 17 Casi en todas partes 20 Coeficiente de Sorensen-Dice 20 Conjunto de Borel 21 Conjunto de Cantor 22 Conjunto de Nikodym 25 Conjunto de Smith-Volterra-Cantor 25 Conjunto de Vitali 27 Ergodicidad 28 Espacio de medida 29 Espacios Lp 30 Esperanza condicional 31 Función de Cantor 32 Función de cuadrado integrable 35 Función indicatriz 36 Función localmente integrable 38 Función medible 39 Hipervolumen 40 Integral de Lebesgue 41 Medida de Lebesgue 45 Medida de probabilidad 47 Medida espectral 47 Medida exterior 48 Teoría ergódica 49
Transcript of WIKI Álgebras-Hodge-teoremas
ContenidosArtículos
Álgebra de Borel 1Compacidad local 2Espacio compacto 2Paul Halmos 4Espacio separable 6Espacio métrico 7Σ-álgebra 10Álgebra de conjuntos 12Anillo de conjuntos 14Espacio de Sóbolev 15Teoría de la medida 17Casi en todas partes 20Coeficiente de Sorensen-Dice 20Conjunto de Borel 21Conjunto de Cantor 22Conjunto de Nikodym 25Conjunto de Smith-Volterra-Cantor 25Conjunto de Vitali 27Ergodicidad 28Espacio de medida 29Espacios Lp 30Esperanza condicional 31Función de Cantor 32Función de cuadrado integrable 35Función indicatriz 36Función localmente integrable 38Función medible 39Hipervolumen 40Integral de Lebesgue 41Medida de Lebesgue 45Medida de probabilidad 47Medida espectral 47Medida exterior 48Teoría ergódica 49
Teorema de Carathéodory 51Paradoja de Banach-Tarski 52Teorema de Radon–Nikodym 53Teorema del sándwich de jamón 54Teorema de aproximación de Weierstrass 55Teorema de Arzelá-Ascoli 56Teorema de Bolzano-Weierstrass 56Teorema de Cartan 58Teorema de convolución 58Lema de Cotlar 59Criterio de Leibniz 60Teorema de descomposición espectral 61Dualidad de Pontryagin 62Teorema de Fermat (análisis) 65Teorema de Fuchs 66Teorema de la función abierta 66Teorema de la función inversa 67Teorema de Hahn–Banach 69Teorema de Heine-Borel 70Teorema de Heine-Cantor 71Teorema de Kirszbraun 72Teorema de Liouville (análisis complejo) 72Teorema de representación conforme de Riemann 73Teoremas de Mertens 74Teorema de Ostrowski y Reich 75Teorema de Peter-Weyl 75Teorema de Picard 76Teorema de Picard-Lindelöf 76Principio de los intervalos encajados 78Teorema de representación de Riesz 79Teorema de Sturm 81Teorema de Bohr-Mollerup 83Teorema de factorización de Weierstrass 84Teorema de Hurwitz (análisis complejo) 86Teorema de inversión de Lagrange 87Teorema de la gráfica cerrada 88Teorema de Sard 89Teorema de superposición de Kolmogórov 90
Teorema de Weierstrass-Casorati 90Teorema de Weierstrass 92Teorema de Gauss-Bonnet 93Teorema de Gauss-Bonnet generalizado 94Teorema de Stokes 95Theorema egregium 97Teorema de la base de Hilbert 99Teorema de torsión de Mazur 99Teorema de Nagell-Lutz 100Conjetura de Hodge 100Geometría algebraica 101Variedad algebraica 106Dualidad de Poincaré 107Cohomología de De Rham 109Variedad de Kähler 110Variedad diferenciable 111Forma diferencial 117Anexo:Problemas no resueltos de la matemática 119Clases de complejidad P y NP 121Conjetura de Birch y Swinnerton-Dyer 127Conjetura de Collatz 128Conjetura de Goldbach 132Hipótesis de Lindelöf 134Hipótesis de Riemann 137Número de Giuga 140Número cuasiperfecto 141Problema de Galois inverso 142Problema del círculo de Gauss 145Problemas de Hilbert 148Problemas de Smale 154Problemas del milenio 155Test de primalidad 157Conjetura 166Conjetura abc 166Conjetura de Beal 167Conjetura de Artin sobre raíces primitivas 169Conjetura de Fermat–Catalan 170Conjetura de Hirsch 171
Conjetura de Kepler 172Conjetura de Ramanujan–Petersson 173Conjetura débil de Goldbach 174Hipótesis generalizada de Riemann 175Hipótesis H de Schinzel 178Conjetura de Mertens 180Número de Euclides 181Conjetura de Pólya 181Sucesión de Euclides-Mullin 182Cohomología de Čech 184Cohomología 185Recubrimiento (matemática) 186Espacio topológico 187Teorema fundamental de la geometría de Riemann 189Tensor métrico 191Geometría de Riemann 194Variedad pseudoriemanniana 195Variedad de Riemann 197Álgebra de Lie 201Teorema fundamental 203Teorema fundamental de la aritmética 204Teorema fundamental de la teoría de Galois 207Teorema fundamental de homomorfismos 208Teorema fundamental del cálculo 209Teorema fundamental del álgebra 213Teoremas fundamentales de la economía del bienestar 216Lema fundamental de teoría de cribas 224
ReferenciasFuentes y contribuyentes del artículo 226Fuentes de imagen, Licencias y contribuyentes 230
Licencias de artículosLicencia 232

Álgebra de Borel 1
Álgebra de BorelEn matemáticas, el álgebra de Borel (más correctamente, σ-álgebra de Borel, también llamada boreliana) sobre unespacio topológico X es una σ-álgebra de subconjuntos de X asociada a la topología de X. En la literatura matemáticase pueden encontrar dos definiciones no equivalentes de ésta:• La σ-álgebra generada por los conjuntos abiertos.• La σ-álgebra generada por los conjuntos compactos.La σ-álgebra generada por una colección T de subconjuntos de X se define como la mínima σ-álgebra que contiene aT. La existencia y unicidad de una tal σ-álgebra se demuestra fácilmente notando que la intersección de todas lasσ-álgebras que contienen a T es en sí misma una σ-álgebra que contiene a T.Los elementos del álgebra de Borel se llaman conjuntos de Borel o conjuntos borelianos.En espacios topológicos generales, o aun en los localmente compactos, las dos estructuras definidas arriba puedenser diferentes, aunque este fenómeno se considera patológico en el análisis matemático. De hecho, las dos estructurascoinciden si el espacio en consideración es un espacio localmente compacto, separable y métrico.
EjemploUn ejemplo importante, especialmente en teoría de probabilidad, es el álgebra boreliana sobre el conjunto de losnúmeros reales. Es la σ-álgebra en la cual se define la medida de Borel. Dada una variable aleatoria real en unespacio de probabilidad, su distribución de probabilidad es, por definición, también una medida en el álgebraboreliana. El álgebra de Borel también es la mínima σ-álgebra sobre R que contiene a los subconjuntos cerrados deR, a los intervalos abiertos o cerrados, a los intervalos semiabiertos de la forma (a, b], o a los intervalos de la forma(−∞,b].
Referencias• William Arveson, An Invitation to C*-algebras, Springer-Verlag, 1981. Una excelente presentación del aparataje
de la topología polonesa se encuentra en el capítulo 3 de esta obra.• Richard Dudley, Real Analysis and Probability. Wadsworth, Brooks and Cole, 1989• Paul Halmos, Measure Theory, D.van Nostrand Co., 1950• Halsey Royden, Real Analysis, Prentice Hall, 1988• Donald L. Cohn, Measure theory, Birkhäuser, 1997.
Compacidad local 2
Compacidad localEn topología y otras áreas de la matemática, la compacidad local es una propiedad topológica de un espaciotopológico debido a la cual alrededor de cada punto, localmente, el espacio tiene propiedades similares a las de unespacio compacto.Formalmente, si X es un espacio topológico entonces es localmente compacto si, y sólo si, cada punto geométricoadmite una base local de vecindades o entornos compactos, es decir, si cada entorno de un punto x de X contiene unconjunto compacto que sea un entorno de x.Sea E un espacio topológico separado y localmente compacto. Si considerameos E' como la unión de E y un punto xno perteneciente a E, E' resulta ser un espacio compacto y separado (Hausdorff).De ahí se obtiene el Teorema de Alexandroff: Todo espacio localmente compacto está contenido en un EspacioCompacto.
Espacio compactoEn topología, un espacio compacto es un espacio que tiene propiedades similares a un conjunto finito, en cuanto aque las sucesiones contenidas en un conjunto finito siempre contienen una subsucesión convergente. La propiedad decompacidad es una versión más fuerte de esta propiedad.Un conjunto compacto es un subconjunto de un espacio topológico, que como subespacio topológico (con latopología inducida) es en sí mismo un espacio topológico compacto.
Definición
Definición generalLa definición moderna de compacidad requiere primero especificar la noción de recubrimiento abierto:
Un recubrimiento abierto de un subconjunto A ⊆ X de un espacio topológico, es una familia de conjuntosabiertos Oii ∈ I de X, tales que su unión "cubre" a A :
Dado un recubrimiento C de un conjunto A, un subrecubrimiento D es una subfamilia de C, D ⊆ C que sigue siendoun recubrimiento de A —es decir, una subcolección de conjuntos de C que aún cubre a A—.La definición de compacidad es entonces:
Un espacio topológico X se dice compacto si, dado un recubrimiento abierto de X cualquiera, existe unsubrecubrimiento finito del mismo.
Ejemplos.
• El conjunto K = 1, 1/2, 1/3, 1/4, ..., 0 ⊆ R con la topología heredada de la estándar de R es compacto. Dado unentorno de 0, este incluye a todos los 1/n salvo un número finito —puesto que la sucesión 1/nn ∈ N converge a0—. Por tanto, dado un recubrimiento abierto de K, tomando un abierto O que contenga a 0, y un abierto quecontenga cada punto 1/n no contenido en O, esta subcolección finita cubre a K.
• El intervalo abierto (0, 1) ⊆ R no es compacto (con la topología usual heredada de R). La familia (0, 1 − 1/n) n
> 1 es un recubrimiento abierto del intervalo, pero dada cualquier subfamilia finita, existe un intervalo (0, 1 − 1/k)en ella que contiene a los demás —buscando aquel con k mínimo—. Como 1 − 1/p no está en (0, 1 − 1/k) si p > k,ninguna subfamilia finita cubre (0, 1).
Espacio compacto 3
Caracterizaciones equivalentesLa compacidad de un espacio admite varias formulaciones alternativas:
Las siguientes afirmaciones sobre un espacio topológico X son equivalentes entre sí:1. X es compacto.2. Si Fii ∈ I es una familia de subconjuntos cerrados en X con la propiedad de la intersección finita, entonces
∩IFi ≠ ∅.3. Toda red en X admite una subred convergente.4. La función al punto es propia.
Compacidad en espacios métricosUn subconjunto A de un espacio métrico y, en particular, del espacio euclídeo , es compacto si cumple algunade las cuatro condiciones de la definición general. No obstante, la tercera de ellas admite la siguiente reescritura eneste contexto: toda sucesión en admite una subsucesión convergente.
Ejemplos• El ejemplo paradigmático de espacio compacto es un intervalo cerrado de la recta.• Más generalmente, también lo es cualquier conjunto cerrado y acotado del espacio euclídeo.• Un ejemplo de espacio no compacto es la recta real, pues no es acotada y contiene sucesiones que tienden a
infinito.• Tampoco es compacto el conjunto de los números racionales, pues uno puede acercarse arbitrariamente a puntos
que faltan.
Teoremas asociados a la compacidad
Teorema de Heine-BorelPor el teorema de Heine-Borel, un espacio métrico es compacto si y sólo si es completo y totalmente acotado. Parasubconjuntos del espacio euclídeo, basta con que éste sea cerrado y acotado, que es una caracterización útil.Sin embargo, en dimensión infinita, esto no es verdad, y, de hecho, en este contexto la bola unitaria cerrada jamásserá compacta; por lo mismo, es mucho más difícil verificar compacidad.
Referencias• Ivorra, Carlos, Análisis [1], consultado el 21-05-2011.• Munkres, James (2001). Topología. Pearson Educación. ISBN 9788420531809.
Referencias[1] http:/ / www. uv. es/ ivorra/ Libros/ Analisis. pdf

Paul Halmos 4
Paul Halmos
Paul Halmos.
Paul Richard Halmos (3 de marzo de 1916 - 2 de octubrede 2006) fue un destacado matemático estadounidense,nacido en Budapest (Hungría).
Halmos se destacó tanto por sus contribuciones teóricas, enramas como en teoría de las probabilidades, estadística,teoría de operadores, teoría ergódica y análisis funcional,(especialmente sobre los Espacios de Hilbert); así como porhaber redactado una serie de libros de textoexcepcionalmente bien escritos.
Biografía
Habiendo nacido en Budapest, se trasladó a Chicago cuandoaún era un niño. Se destacó desde muy joven en los camposde la filosofía y las matemáticas, y en 1934, con tan sólo 18años, se graduó en la Universidad de Illinois. Un año despuésfracasó en la obtención del "Master of Arts" en filosofía,aunque logró conseguir el "Master of Sciences".
Tiempo después, conseguió el doctorado en matemáticas, porla universidad de Illinois. Posteriormente entró en el "Institute for Advanced Study" de Princeton (Nueva Jersey),trabajando como asistente de John von Neumann durante dos años. Más tarde se mudó al "Massachusetts Institute ofTechnology", ocupando una plaza como investigador en el laboratorio de radiación.
En 1946 se incorporó a la docencia en la Universidad de Chicago. Durante 1951 trabajó en el Instituto deMatemática y Estadística de Montevideo, invitado por Rafael Laguardia con el objetivo de desarrollar la estadísticaen el Uruguay.Finalmente, en 1961 se incorporó al cuerpo de docentes e investigadores de la Universidad de Míchigan.Falleció de neumonía el 2 de octubre de 2006 a la edad de 90 años. Le sobrevive su esposa Virgina Halmos.
Publicaciones• "A Hilbert Space Problem Book", 1974, ISBN 0-387-90090-X.• "Lectures on Boolean Algebras", 1974, ISBN 0-387-90094-2.• "A Hilbert Space Problem Book: Graduate Texts in Mathematics", ed. Springer Verlag, 1982, ISBN
0-387-90685-1.• "I Want to Be a Mathematician: An Automathography in Three Parts", ed. Mathematical Assn of Amer, 1988,
ISBN 0-88385-445-7.• "Problems for Mathematicians, Young and Old", ed. Mathematical Assn of Amer, 1991, ISBN 0-88385-320-5.• "Linear Algebra Problem Book", ed. Mathematical Assn of Amer, 1995, ISBN 0-88385-322-1.• "Logic as algebra", ed. Mathematical Assn of Amer, 1998, ISBN 0-88385-327-2.• "Finite-Dimensional Vector Spaces", ed. Princeton univ. pr., 2001, ISBN 0-691-09095-5.• "Measure Theory", Van Nostrand R. Co., 1950.• "Naive Set Theory", Van Nostrand R. Co., 1960.En español Teoría intuitiva de conjuntos(1965)CECSA,
México D.F.

Paul Halmos 5
Puntos de vista sobre las matemáticasEn un artículo publicado en la revista científica American Scientist (56,IV, pags. 375-389), Halmos habla delcarácter artístico y creativo de las matemáticas, describiendo a los matemáticos como artistas, y no como merascalculadoras. Por ello plantea la división de las matemáticas en "matematicología" y "físicomatemáticas".
Curiosidades•• El propio Halmos llegó a admitir que cada año tenía que volver a aprender las lecciones que tenía que impartir,
debido a su mala memoria.•• En un gran congreso de matemáticos en EEUU coincidieron por un lado Paul Halmos, y por otro, un joven
profesor llamado Smith. El primer día que se encontraron en la cafetería, Halmos se acercó a Smith, diciendo:"hola, soy Halmos, ¿cómo se llama?" a lo que su compañero respondió educadamente: "Soy Smith, encantado".Al día siguiente, en el mismo lugar, Halmos volvió a acercarse, y se volvió a presentar, y Smith actuó como si eldespistado matemático no se hubiera presentado el día anterior. Al tercer y último día del congreso, Smith viocómo Halmos volvía a acercársele con intención de presentarse, por lo que antes de que hablase, le dijo: "Hola,usted es Halmos, ¿cómo me llamo?".
• El uso en los documentos escritos en computadora del "Quod erat demonstrandum" simbolizado como uncuadrado relleno (∎) es llamado por algunos el “Símbolo de Halmos” quien fue pionero en su utilización.
Referencias• J. H. Ewing / F. W. Gehring, "Paul Halmos: Celebrating 50 years of mathematics", ed. Springer Verlag, Nueva
York, 1991, ISBN 0-387-97509-8.
Enlaces externos• Wikiquote alberga frases célebres de o sobre Paul Halmos. Wikiquote• Obituario de Paul Halmos en The Mathematical Association of America [1]
• O'Connor, John J.; Robertson, Edmund F., «Biografía de Paul Halmos [2]» (en inglés), MacTutor History ofMathematics archive, Universidad de Saint Andrews.
Referencias[1] http:/ / www. maa. org/ news/ 100306halmos. html[2] http:/ / www-history. mcs. st-andrews. ac. uk/ Biographies/ Halmos. html

Espacio separable 6
Espacio separableEn topología, un espacio topológico es un espacio separable si incluye un subconjunto denso numerable.Un espacio de Hilbert es separable si y solamente si admite una base ortonormal numerable.
Espacios de Hilbert separablesSea (H,<,>) un espacio de Hilbert separable. Si ekk ∈ B es una base ortonormal numerable de H, entonces cadaelemento x de H se puede escribir como
Esta suma también se llama la expansión de Fourier de x.
Ejemplos de espacios de Hilbert son con ó el espacio de las sucesiones complejascuadrado-sumables y el espacio de las funciones cuadrado-integrables en el sentido de Lebesgue Una gran variedad de espacios de Hilbert que se presentan en la práctica son separables y son en particular losespacios y los prototipos principales de espacios de Hilbert, pues todo espacio de Hilbert separable dedimensión finita es isomorfo a mientras que todo espacio de Hilbert separable de dimensión infinita esisomorfo a .
Ejemplos
Espacios separables• El conjunto de los números reales R con la topología usual es separable por ser el conjunto de los números
racionales Q un subconjunto denso numerable. En general, el espacio euclídeo Rn es separable por ser Qn denso ynumerable pues es el producto de conjuntos numerables.
• Igualmente el conjunto de los números complejos C es separable siendo en general, el espacio euclídeo Cn
también separable.• Todo espacio topológico numerable es separable.• El conjunto de las funciones continuas en el intervalo [0,1] también es separable.
Espacios de Hilbert no-separables
• El conjunto de todas las funciones reales , que sólo son diferentes de cero en un conjunto finito ocontable de puntos Sf tales que:
Constituye un espacio de Hilbert no separable, dotado del producto escalar entre dos funciones f y g:
Necesariamente estas funciones de este espacio de Hibert no son continuas, ya que los espacios normados defunciones reales continuas definidas en son siempre separables.

Espacio métrico 7
Espacio métricoEn matemática, un espacio métrico es un conjunto junto con una función distancia (porque cumple con unaspropiedades concretas atribuidas a las distancias) definida sobre él, de modo que cualquier par de puntos (oelementos) del conjunto están a una cierta distancia asignada por dicha función.En particular, cualquier espacio métrico será, además, un espacio topológico porque cualquier función de distanciadefinida sobre un conjunto dado induce una topología sobre dicho conjunto. Se trata de la topología inducida por lasbolas abiertas asociadas a la función distancia del espacio métrico.
Definiciones
Definición de espacio métricoFormalmente, un espacio métrico es un conjunto (a cuyos elementos se les denomina puntos) con una funcióndistancia asociada (también llamada una métrica) (donde es el conjunto de los númerosreales). Decir es una distancia sobre es decir que para todo , , en , esta función debe satisfacerlas siguientes condiciones o propiedades de una distancia:1. (positividad)2. (reflexividad)3. si (identidad de los indiscernibles)4. (simetría)5. (desigualdad triangular).
Algunas definiciones asociadas a un espacio métrico
Sea un espacio métrico, y sean y un punto de y un número real positivo ocero, respectivamente:• Se llama bola (abierta) centrada en y de radio , al subconjunto de : ,
denotado usualmente como , o como .• Se llama bola cerrada centrada en y de radio , al subconjunto de : ,
denotado usualmente como o como o también como .• En análisis funcional la terminología puede llevar un poco a confusión, pues a la bola abierta de radio y centro
se la suele denotar por o por , mientras -y aquí viene la posible confusión- a la bola cerradade centro y radio se la denota por o por .
• Algunos autores utilizan la expresión disco en lugar de bola, así es que se puede hablar en términos de discoabierto y disco cerrado. En particular, esta terminología se utiliza en Variable Compleja, y cuando se considerala distancia euclídea sobre el conjunto .
• Se llama esfera centrada en y de radio , al subconjunto de : , denotadousualmente como , o como ..

Espacio métrico 8
Topología de un espacio métricoLa distancia del espacio métrico induce en una topología, y por tanto el espacio es, a su vez, un espaciotopológico al tomar como subconjuntos abiertos para la topología a todos los subconjuntos que cumplen
.Esto es a todos los subconjuntos para los cuales cualquier punto en es el centro de alguna bola de radiopositivo totalmente incluida en , o lo que es lo mismo: U no tiene puntos en la frontera; no tiene frontera.Dicha topología se denomina topología inducida por en .Podemos entonces interpretar intuitivamente que un conjunto abierto es entonces una parte que tiene un cierto"espesor" alrededor de cada uno de sus puntos.
Un subespacio métrico de un espacio métrico es subespacio topológico del espacio topológico, donde es la topología en inducida por . Es decir, hereda de la topología inducida por
.Un entorno de un punto de un espacio métrico no es más que un subconjunto de forma queexista un tal que la bola abierta . El conjunto esbase de la topología inducida por , y también es base de entornos de dicha topología. Como es denso en ,resulta entonces que también es base de entornos de la topología inducidapor . En consecuencia, todo espacio métrico cumple el Primer Axioma de Numerabilidad.Todo espacio métrico es espacio de Hausdorff. Además, al igual que ocurre en espacios pseudométricos, para losespacios métricos son equivalentes las siguientes propiedades: ser espacio de Lindelöf, cumplir el Primer Axioma deNumerabilidad y ser separable.
Sistemas axiomáticos alternativosLa propiedad 1 ( ) se sigue de la 4 y la 5. Algunos autores usan la recta real extendida y admiten quela distancia tome el valor . Cualquier métrica tal puede ser reescalada a una métrica finita (usando
o ) y los dos conceptos de espacio métricoson equivalentes en lo que a topología se refiere. Una métrica es llamada ultramétrica si satisface la siguienteversión, más fuerte, de la desigualdad triangular:
.Si se elimina la propiedad 3, se obtiene un espacio pseudométrico. Sacando, en cambio, la propiedad 4, se obtiene unespacio quasimétrico. No obstante, perdiéndose simetría en este caso, se cambia, usualmente, la propiedad 3 tal queambas y son necesarias para que e se identifiquen. Todas las combinaciones de loanterior son posibles y referidas por sus nomenclaturas respectivas (por ejemplo como quasi-pseudo-ultramétrico).
Ejemplos• Sea X un conjunto cualquiera no vacío y definamos d
Entonces d es una métrica en X, llamada métrica discreta y (X,d) es espacio métrico; (X, d) se llama espaciodiscreto; ver Análisis real de Haaser y Sullivan.• Los números reales con la función distancia d(x, y) = |y - x| dada por el valor absoluto, y más generalmente
n-espacio euclídeo con la distancia euclidiana, son espacios métricos completos. El sistema de los númeroscomplejos C es un espacio métrico . C como espacio métrico es igual a RxR.
Espacio métrico 9
• Más generalmente aun, cualquier espacio vectorial normado es un espacio métrico definiendo d(x, y) = ||y - x||. Sital espacio es completo, lo llamamos espacio de Banach.
• Si X es un conjunto y M es un espacio métrico, entonces el conjunto de todas las funciones acotadas f : X -> M(i.e. aquellas funciones cuya imagen es un subconjunto acotado de M) puede ser convertido en un espacio métricodefiniendo d(f, g) = supx en X d(f(x), g(x)) para cualesquiera funciones acotadas f y g. Si M es completo, entonceseste espacio es completo también.
• Si X es un espacio topológico y M es un espacio métrico, entonces el conjunto de todas las funciones continuasacotadas de X a M forma un espacio métrico si definimos la métrica como antes: d(f, g) = supx en X d(f(x), g(x))para cualesquiera funciones continuas acotadas f y g. Si M es completo, entonces este espacio es completotambién.
• Si M es un espacio métrico, podemos convertir al conjunto K(M) de todos los subconjuntos compactos de M en unespacio métrico definiendo distancia de Hausdorff d(X, Y) = infr: para cada x en X existe un y en Y con d(x, y) <r y para cada y en Y existe un x en X con d(x, y) < r). En este métrica, dos elementos están cerca uno de otro sicada elemento de un conjunto está cerca de un cierto elemento del otro conjunto. Se puede demostrar que K(M) escompleto si M es completo.
Un análisis lógico• El concepto métrico fundamental es el de función corta, los morfismos de la categoría métrica (los isomorfismos,
i.e. aplicaciones bi-cortas, son las isometrías), pero su expresión usual usa el orden y la suma en los realespositivos luego,
• 1) Es obvio que : | x - |x - y | | = y es lo mismo que x = 0 o y ≤ x, luego distancia en los reales positivos da ordendébil allí, orden fuerte (y ≤ x ssi ... ) es difícil, pero posible, si se acepta una solución de |x - y | = y i.e. y = x / 2.
• 2) | d(y, z) - |d(y, z) - d´(f(y), f(z)) | | = d´(f(y), f(z)) expresa que f es una función corta, sin ninguna referencia a unorden en los reales positivos.
• 3) La siguiente equivalencia de la desigualdad triangular| d(x, y) - d(x, z) | ≤ d(y, z)
expresa (sin ninguna referencia a una operación en los reales positivos, |x - y| es la distancia allí) el hecho que d(x,-) es función corta (luego uniforme, luego continua). d: x - > d(x,-) es una isometría.• Reuniendo ambas : | d(y, z) - |d(y, z) - | d(x, y) - d(x, z) | | | = | d(x, y) - d(x, z) | expresa desigualdad triangular
directamente.• un leve cambio : | d(y, z) - |d(z, y) - | d(x, y) - d(x, z) | | | = | d(x, y) - d(x, z) | expresa desigualdad triangular y
simetría (hacer z = x y usar | x - d(y, y)| = x).
Espacios metrizablesUn espacio topológico se dice que es metrizable cuando existe una distancia cuya topología inducida seaprecisamente la topología .Un problema fundamental en Topología es determinar si un espacio topológico dado es o no metrizable. Existendiversos resultados al respecto.
Teorema de metrización de UrysohnTodo espacio topológico regular que cumpla el Segundo Axioma de Numerabilidad es metrizable.

Espacio métrico 10
Teorema de metrización de Nagata-Smirnov (condición suficiente)Todo espacio regular con una base numerable localmente finita es metrizable.
Teorema de metrización de Nagata-Smirnov (condición necesaria)Todo espacio metrizable tiene una base numerable localmente finita.
Teorema de metrización de StoneTodo espacio metrizable es paracompacto.
Teorema de metrización de SmirnovUn espacio topológico es metrizable si y solo si es paracompacto y localmente metrizable.
Teorema de metrización de espacios completamente separablesUn espacio topológico completamente separable es metrizable si y solo si es regular.
Referencias• Athanase Papadopoulos, Metric Spaces, Convexity and Nonpositive Curvature, European Mathematical Society,
2004, SBN 978-3-03719-010-4
Σ-álgebraEn matemáticas, una σ-álgebra (léase sigma-álgebra) sobre un conjunto X es una familia Σ no vacía desubconjuntos de X, cerrada bajo complementos, uniones e intersecciones contables. Las σ-álgebras se usanprincipalmente para definir medidas en X. El concepto es muy importante en análisis matemático y en teoría de laprobabilidad.
Definición(σ-álgebra) Una familia de subconjuntos de X, representada por Σ, es una σ-álgebra sobre X cuando secumplen las siguientes propiedades:
1. El conjunto vacío está en Σ: .2. Si E está en Σ, también está su complemento .3. Si E1, E2, E3, ... es una sucesión de elementos de Σ, entonces la unión (contable) de todos ellos también está en
Σ.Una σ-álgebra debe contener también al conjunto total X, ya que la segunda propiedad aplicada a tienecomo consecuencia que pertenece a la σ-álgebra.La aplicación de las leyes de De Morgan
establecen que las intersecciones contables de sucesiones de conjuntos en la σ-álgebra también pertenecen a laσ-álgebra.Los elementos de una σ-álgebra Σ se denominan conjuntos Σ-medibles (o simplemente conjuntos medibles, cuando no hay ambigüedad sobre Σ). Un par ordenado (X, Σ), donde X es un conjunto y Σ una σ-álgebra sobre éste, se denomina espacio medible. Una función entre dos espacios medibles se denomina medible si la preimagen de todo
Σ-álgebra 11
conjunto medible es también medible; esto es, si (X, Σ) y (Y, Ω) son dos espacios medibles, una función f:X→Y esmedible si para todo E , f−1(E) .Una medida es una cierta clase de función medible de una σ-álgebra en el intervalo [0,∞].Ejemplos:• Si P(X) es el conjunto potencia del conjunto X entonces P(X) es una σ-álgebra sobre X (la mayor σ-álgebra
posible sobre X).• Para cualquier conjunto X, el conjunto es una σ-álgebra sobre X (la menor σ-álgebra posible sobre X).• Si A es una colección de subconjuntos de X, la intersección de todas las σ-álgebras que contienen a A es también
una σ-álgebra, denotada por o por y denominada σ-álgebra generada por A. Esta es porconstrucción la menor σ-álgebra posible que contiene a la colección A.
• La familia de subconjuntos de X que son contables o de conjunto complementario contable (esta familia esdistinta del conjunto potencia de X si y sólo si X es incontable). Esta es la σ-álgebra generada por los conjuntosunitarios de X.
• Cuando , la σ-álgebra generada por la colección de todos los intervalos abiertos finitos se denominaálgebra de Borel (sobre ).
• El ejemplo anterior se puede generalizar a espacios topológicos arbitrarios: la σ-álgebra generada por todos losconjuntos abiertos de un espacio topológico X es el álgebra de Borel asociada al espacio X.
• En el espacio euclidiano , cabe destacar otra σ-álgebra: la formada por los conjuntos Lebesgue-medibles.Ésta contiene más conjuntos que el álgebra de Borel en , y es la que se prefiere en teoría de integración.
Bibliografía• Robert G. Bartle (1995) [1966]. The Elements of Integration and Measure Theory. Wiley. ISBN 0471042226.• Medida e integración , Mauro Chumpitaz (1989) UNI- Lima.• Teoría de la medida, Mauro Chumpitaz (1991) UNI- Lima.
Álgebra de conjuntos 12
Álgebra de conjuntosEn matemáticas, álgebra de conjuntos es el estudio de las operaciones básicas que pueden realizarse con conjuntos,como la unión, intersección y complementación.
ConjuntosUn conjunto es una colección de objetos considerada como un objeto en sí. Un conjunto está definido únicamentepor los elementos que lo componen, y no por la manera en la que se lo representa.Existe una serie de relaciones básicas entre conjuntos y sus elementos:• Pertenencia. La relación relativa a conjuntos más básica es la relación de pertenencia. Dado un elemento x, éste
puede o no pertenecer a un conjunto dado A. Esto se indica como x ∈ A.• Igualdad. Dos conjuntos son iguales si y sólo si tienen los mismos elementos. Este principio, denominado
principio de extensionalidad establece el hecho de que un conjunto queda definido únicamente por sus elementos.• Inclusión. Dado un conjunto A, cualquier subcolección B de sus elementos es un subconjunto de A, y se indica
como B ⊆ A.El conjunto vacío es el conjunto sin ningún elemento, y se denota por ∅ o por . El conjunto universal es elconjunto que contiene todos los elementos posibles, dentro del contexto considerado. Por ejemplo, si se estudian losnúmeros naturales, el conjunto universal es el conjunto de todos ellos, N. De manera general, el conjunto universalse denota por U.Ejemplos• Cada número natural es elemento del conjunto N = 1, 2, 3, ... de los números naturales: 1 ∈ N, 2 ∈ N, etc. Cada
número par es también un número natural, por lo que el conjunto P de los números pares, P = 2, 4, 6, ..., es unsubconjunto de N: P ⊆ N.
• Dado el conjunto de letras V = o, i, e, u, a, se cumple por ejemplo que a ∈ V o también i ∈ V. El conjunto deletras U = vocales del español contiene los mismos elementos que V, por lo que ambos conjuntos son iguales,V = U.
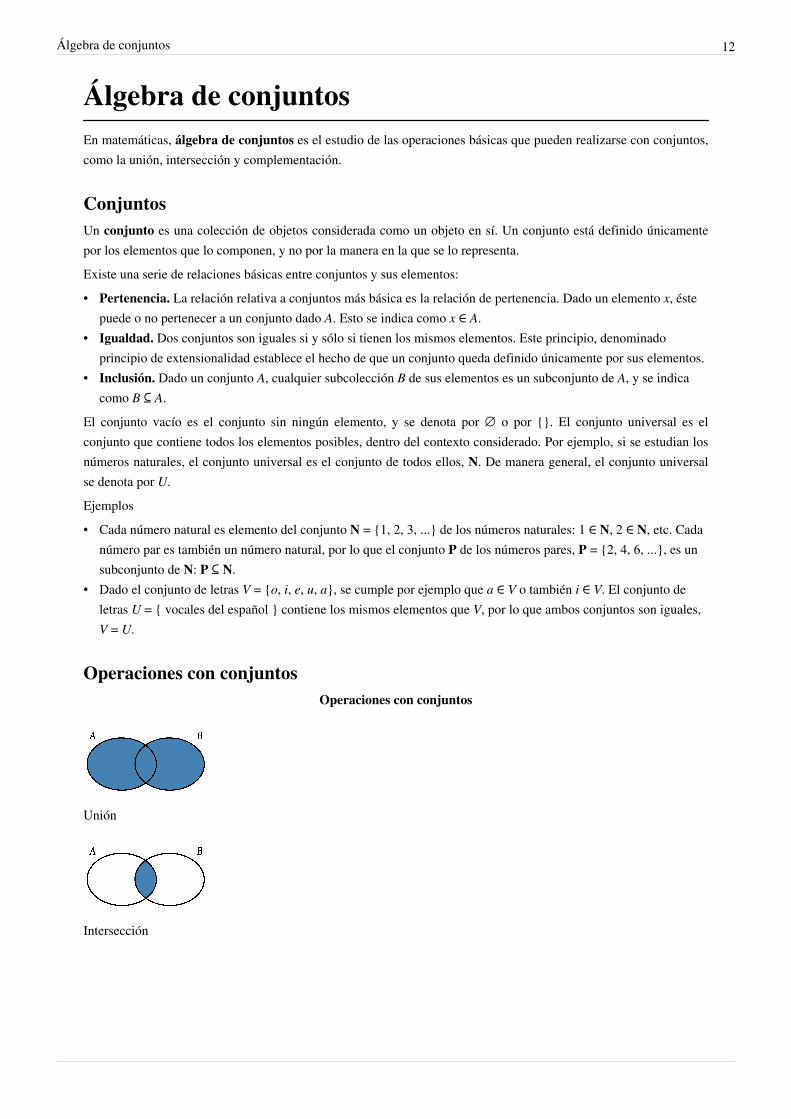
Operaciones con conjuntosOperaciones con conjuntos
Unión
Intersección
Álgebra de conjuntos 13
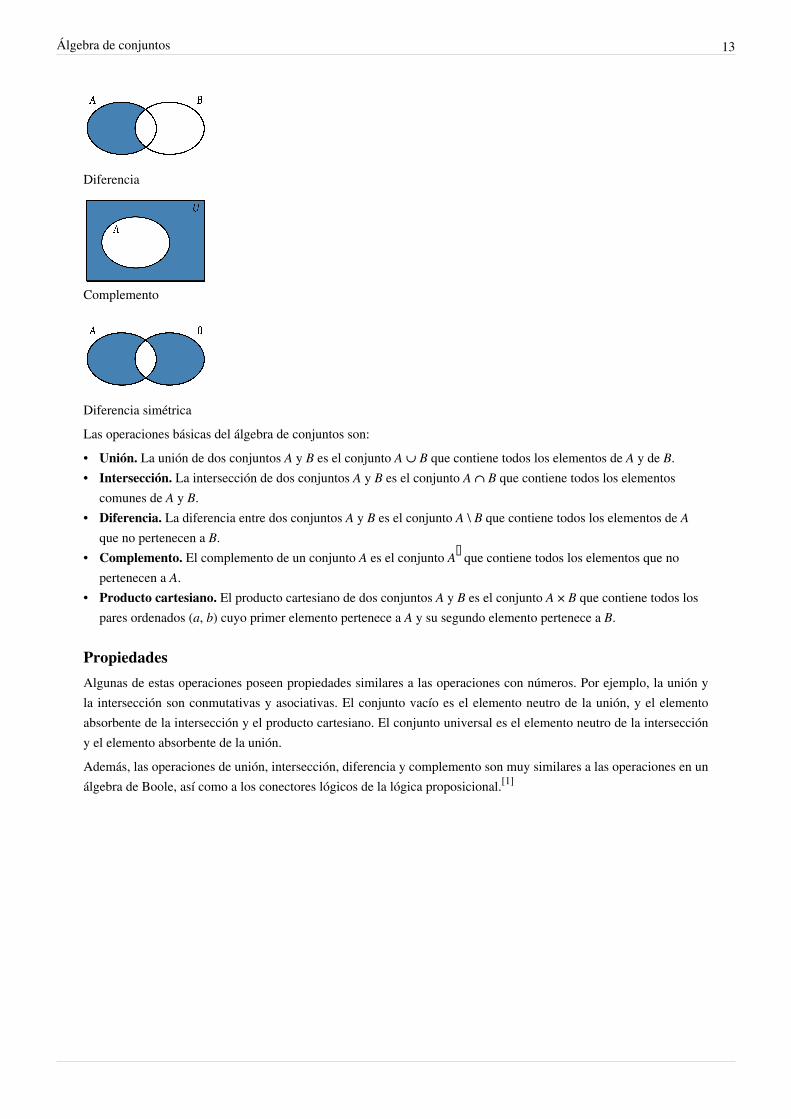
Diferencia
Complemento
Diferencia simétricaLas operaciones básicas del álgebra de conjuntos son:• Unión. La unión de dos conjuntos A y B es el conjunto A ∪ B que contiene todos los elementos de A y de B.• Intersección. La intersección de dos conjuntos A y B es el conjunto A ∩ B que contiene todos los elementos
comunes de A y B.• Diferencia. La diferencia entre dos conjuntos A y B es el conjunto A \ B que contiene todos los elementos de A
que no pertenecen a B.• Complemento. El complemento de un conjunto A es el conjunto A∁ que contiene todos los elementos que no
pertenecen a A.• Producto cartesiano. El producto cartesiano de dos conjuntos A y B es el conjunto A × B que contiene todos los
pares ordenados (a, b) cuyo primer elemento pertenece a A y su segundo elemento pertenece a B.
PropiedadesAlgunas de estas operaciones poseen propiedades similares a las operaciones con números. Por ejemplo, la unión yla intersección son conmutativas y asociativas. El conjunto vacío es el elemento neutro de la unión, y el elementoabsorbente de la intersección y el producto cartesiano. El conjunto universal es el elemento neutro de la interseccióny el elemento absorbente de la unión.Además, las operaciones de unión, intersección, diferencia y complemento son muy similares a las operaciones en unálgebra de Boole, así como a los conectores lógicos de la lógica proposicional.[1]
Álgebra de conjuntos 14
Referencias[1][1] Véase .
• Barco Gómez, Carlos (2005). Álgebra Booleana. Aplicaciones tecnológicas. Universidad de Caldas. ISBN
9789588231389.• Larson, Harold J. (2002). «1. Teoría de conjuntos». Introducción a la teoría de probabilidades e inferencia
estadística. Editorial Limusa. ISBN 9789681807306.• Nachbin, Leopoldo (1980). «1. Conjuntos y funciones». Introducción al álgebra. Reverté. ISBN 9788429150995.• Rivaud, J. (1981). «1. Conjuntos. Aplicaciones. Relaciones. Numerabilidad.». Ejercicios de álgebra. ISBN
9788429151312.
Enlaces externos• Wikimedia Commons alberga contenido multimedia sobre Álgebra de conjuntosCommons.
Anillo de conjuntosEn matemática, específicamente en álgebra abstracta y teoría de anillos, una colección no vacía de conjuntos esun anillo (de conjuntos) si es cerrada bajo las operaciones de intersección y diferencia simétrica.
Formalmente, para cualquier , debe cumplirse1.2.
donde representa la diferencia simétrica Un anillo de conjuntos forma un anillo (posiblemente sin unidad) bajo estas dos operaciones. La intersección sedistribuye sobre la diferencia simétrica:
El conjunto vacío es el elemento identidad para , y la unión de todos los conjuntos, es el elemento identidad para, creando un anillo unitario.
Dado cualquier conjunto X, el conjunto potencia de X forma un anillo de conjuntos discreto, mientras que lacolección ∅,X constituye un anillo de conjuntos no discreto. Cualquier campo de conjuntos, así como cualquiersigma-álgebra son también anillos de conjuntos.Los anillos de conjuntos son retículos distributivos.
Referencias• Ring of sets [1] en PlanetMath
Referencias[1] http:/ / planetmath. org/ ?op=getobj& amp;from=objects& amp;id=7757

Espacio de Sóbolev 15
Espacio de SóbolevUn espacio de Sóbolev es un tipo de espacio vectorial funcional, dotado de una norma de tipo Lp, tal que la funcióny sus derivadas hasta cierto orden tienen norma finita. Un espacio de Sóbolev puede ser considerado como unsubespacio de un espacio Lp, estos espacios reciben su nombre del matemático ruso Sergéi Sóbolev.
Espacios Un espacio de Sóbolev es un espacio vectorial normado de funciones puede verse como un subespacio de un espacioLp. De hecho un espacio de Sóbolev es un subespacio vectorial del espacio Lp formado por clases de funciones talesque sus derivadas hasta orden m pertenecen también a Lp. Dado un dominio el espacio de Sobolev se define como:
Donde es la notación multi-índice para las derivadas parciales. Debe tenerse presente que dicho espacio estáde hecho formado realmente por clases de equivalencia de funciones.La norma del espacio de Sóbolev se define a partir de la norma de Lp:
Algunas propiedades interesantes son:• Los espacios de Sóbolev son reflexivos, es decir isomorfos a su espacio bidual, para • El espacio de Sóbolev • si •• es denso en Esta última propiedad permite definir un subespacio de clases de equivalencia de funciones que se anulan sobre lafrontera, a partir de la clausura topológica:
Espacios Algunos espacios de Sóbolev, con pueden ser dotados de la estructura de espacio de Hilbert al igual que losespacios L2:
Donde el producto interno se define a partir del producto interno de L2:
Analagamente al caso de los espacios se define el espacio:
Espacio de Sóbolev 16
EjemploDado el intervalo [a, b], se puede definir el espacio de Sobolev a partir del espacio de funcionescontinuamente diferenciables sobre [a, b] con un producto escalar obtenido por la integral definida desde a hasta b,de la suma de los productos de funciones con el producto de sus derivadas:
(*)
Dicho espacio no es completo; su completación es un espacio de Hilbert llamado espacio de Sóbolev y denotado H .Propiedad: El espacio está encajado en el espacio de las funciones continuas .
Referencia
Bibliografía• R. A. Adams (1975): Sobolev Spaces, Academic Press, New York, 1975.• R. Dautray & J.L. Lions, Mathematical Analysis and Numerical Methods for Science and Technology, Vol II,
Functional and Variational Methods, Springer-Verlag, Nwe York, 1988.• S.L. Sobolev, "On a theorem of functional analysis" Transl. Amer. Math. Soc. (2) , 34 (1963) pp. 39–68 Mat. Sb.
, 4 (1938) pp. 471–497•• S.L. Sobolev, "Some applications of functional analysis in mathematical physics" , Amer. Math. Soc. (1963)• E. Zeidler, Nonlinear Functional Analysis and its Applications. I: Fixed-point Theorems, Springer-Verlag, New
York, 1985.• E. Zeidler, Nonlinear Functional Analysis and its Applications. IIA: Fixed-point Theorems, Springer-Verlag, New
York, 1990.• E. Zeidler, Nonlinear Functional Analysis and its Applications. III: Fixed-point Theorems, Springer-Verlag, New
York, 1986.

Teoría de la medida 17
Teoría de la medida
Una medida aplica ciertos subconjuntos(pertenecientes a una σ-álgebra) en
valores del intervalo [0, ∞].
La teoría de la medida es una rama del análisis real que investiga lasσ-álgebras, las medidas, funciones medibles e integrales. Es de importanciacentral en probabilidad y en estadística.
En matemática, una medida es una función que asigna un número realpositivo o cero, interpretable como un "intervalo", un "área", un "volumen", ouna "probabilidad", a los subconjuntos de un conjunto dado. El concepto esimportante para el análisis matemático, la geometría y para la teoría de laprobabilidad.
A menudo, el ambicioso objetivo de asignar una medida a todo subconjuntodel conjunto base se revela inalcanzable. Solo será posible, o interesante enalgunos casos, asignar medida a ciertas familias de subconjuntos, a los quellamaremos medibles. Las condiciones de consistencia que deben cumplir losmiembros de estas familias quedan encapsuladas en el concepto auxiliar deσ-álgebra.
Definiciones formales
Formalmente, una medida μ es una función definida en una σ-álgebra Σ sobreun conjunto X con valores en el intervalo real extendido [0, ∞], que verifica:
• La medida del conjunto vacío es cero: μ( ) = 0.• Si E1, E2, E3, ... una sucesión contable de conjuntos disjuntos dos a dos de la σ-álgebra Σ y E es su unión,
entonces μ(E) es igual a la suma de las medidas de los Ek; esto es,
La terna (X, Σ, μ) se denomina espacio de medida, y los elementos de Σ se denominan conjuntos medibles.
PropiedadesVarias propiedades pueden deducirse directamente de la definición.
Monotonía
μ es monótona: si y son dos conjunto medibles, con , entonces .
Uniones contablesSi E1, E2, E3, ... es una sucesión contable de conjuntos medibles, su unión será también medible (por la definición deσ-álgebra), y
Si se tiene además que En ⊆ En+1 para todo n, entonces
Teoría de la medida 18
Intersecciones contablesSi E1, E2, E3, ...es una sucesión contable de conjuntos medibles, y En+1 ⊆ En para todo n, entonces la intersección delos conjuntos En es medible (de nuevo, por la definición de σ-álgebra); más aún, si al menos uno de los En tienemedida finita, entonces
Esta igualdad no es necesariamente cierta si ninguno de los En no tiene medida finita; por ejemplo, para cada n ∈ N,tómese
Todos estos conjuntos tienen medida infinita, de modo que el límite al lado derecho de la igualdad es ∞; sinembargo, su intersección es vacía y por lo tanto tiene medida 0.
Medidas sigma-finitasUn espacio de medida (X, Σ, μ) se dice finito si μ(X) es un número real finito (en lugar de ∞). Y se dice σ-finito(leído sigma finito) si X es la unión contable de conjuntos medibles de medida finita. Un conjunto en un espacio demedida tiene medida σ-finita si es una unión contable de conjuntos de medida finita.Por ejemplo, los números reales con la medida de Lebesgue estándar forman un espacio σ-finito pero no finito.Considérese el intervalo cerrado [k, k+1] para cada entero k; hay una cantidad contable de tales intervalos, cada unotiene medida 1, y su unión es la recta real completa. Alternativamente, tómense los números reales con la medida deconteo, que asigna a cada conjunto finito de números reales el número de puntos en el conjunto. Este espacio demedida no es σ-finito, ya que cada conjunto de medida finita contiene finitos puntos, y se necesitaría una cantidad nocontable de ellos para cubrir la recta entera. Los espacios de medida σ-finita tienen algunas propiedadesconvenientes; así, la σ-finitud puede ser comparada a la separabilidad de los espacios topológicos.
CompletitudUn conjunto medible S es llamado un conjunto nulo si μ(S) = 0, y conjunto despreciable si está propiamentecontenido en uno nulo. La medida μ se dice completa si todo conjunto despreciable es medible (y por lo tanto, nulotambién).Una medida puede extenderse a una completa considerando la σ-álgebra de conjuntos T ⊆ X que difieren de unconjunto medible S en un conjunto despreciable; esto es, tal que la diferencia simétrica T Δ S está contenida en unconjunto nulo. En tal caso se define μ(T) = μ(S).
EjemplosA continuación se listan algunos ejemplos importantes de medidas.• La medida de conteo se define por μ(S) = número de elementos en S, si S es finito; o en caso contario.• La medida de Lebesgue es la única medida completa, invariante por translaciones, sobre una σ-álgebra sobre R
que contenga a los intervalos, y tal que μ([0,1]) = 1.•• La medida de ángulo circular, que es invariante por rotaciones.• La medida de Haar para un grupo topológico localmente compacto es una generalización de la medida de
Lebesgue y tiene una propiedad de unicidad similar.• La medida cero es la definida mediante μ(S) = 0 para todo S.• La medida exterior de Hausdorff-Besicovitch se usa en geometría fractal para medir el df-contenido de un
conjunto fractal de dimensión df.
Teoría de la medida 19
• Todo espacio de probabilidad da lugar a una medida que toma el valor 1 sobre todo el espacio (y por tanto tomatodos sus valores en el intervalo unitario [0,1]). Tal medida es denominada medida de probabilidad.
Otras medidas notables son las de Borel, Jordan, y Radon.
ContraejemplosContrariamente a lo que podría esperarse, no todos los conjuntos del espacio euclídeo son medibles; algunosejemplos de estos conjuntos contraintuitivos son el conjunto de Vitali, y los que aparecen en las paradojas deHausdorff y Banach-Tarski.
GeneralizacionesPara ciertos propósitos, es útil tener una "medida" cuyos valores no se restrinjan a los reales no negativos y elinfinito. Por ejemplo, una función de conjunto numerable aditiva con valores en los números reales (con signo) sellama medida con signo, mientras que tal tipo de función con valores en los números complejos se llama medidacompleja. Una medida que tome valores en un espacio de Banach se llama medida espectral; son usadas a menudoen análisis funcional en el teorema espectral. Para distinguir las medidas usuales, con valores positivos, de lasgeneralizaciones, se habla de medidas positivas.Otra generalización es la medida finitamente aditiva. Es igual que una medida, salvo que en lugar de requeriraditividad contable, sólo se necesita aditividad finita. Históricamente, esta definición se usó inicialmente, pero noresultó ser tan útil. En general, las medidas finitamente aditivas están conectadas con nociones como los límites deBanach, el dual de L∞, y la compactificación de Stone-Čech. Todas éstas están conectadas de alguna forma con elaxioma de elección.El interesante resultado en geometría integral conocido como teorema de Hadwiger establece que el espacio defunciones de conjunto invariantes por translaciones, finitamente aditivas, no necesariamente no negativas definidassobre las uniones finitas de conjuntos compactos y convexos en Rn consiste (salvo múltiplos escalares) en una"medida" que es "homogénea de grado k" para cada k = 0, 1, 2, ..., n, y combinaciones lineales de esas "medidas"."Homogénea de grado k" significa que "re-escalar" cualquier conjunto por un factor c > 0 multiplica la "medida" delconjunto por un factor ck. La que es homogénea de grado n es el volumen ordinario n-dimensional. La homogénea degrado n-1 es el "volumen de superficie". La homogénea de grado 1 es una función misteriosa llamada "anchuramedia" (en inglés, "mean width"), un mal nombre. La homogénea de grado 0 es la característica de Euler.
Casi en todas partes 20
Casi en todas partesEn teoría de la medida, una propiedad se cumple casi en todas partes (c.t.p.) si el conjunto de puntos para los cualesla propiedad no es cierta es un conjunto de medida nula[1] En los casos en que la medida no es completa, essuficiente que el conjunto esté contenido en un conjunto de medida nula.Algunos textos para referirse a una propiedad que se cumple casi en todas partes, usan la abreviatura a.e. (de laexpresión inglesa almost everywhere), y algunos otros trabajos generalmente más viejos usan también la abreviaciónp.p. (de la expresión francesa presque partout).En este artículo, cuando se discuten conjuntos de números reales, se entiende a menos que se diga lo contrario que lamedida empleada es la medida de Lebesgue.
Referencia[1][1] Halmos, 1974
Bibliografía• Billingsley, Patrick (1995). Probability and measure (3rd edition edición). New York: John Wiley & sons. ISBN
0-471-00710-2..• Halmos, Paul R. (1974). Measure Theory. New York: Springer-Verlag. ISBN 0-387-90088-8.
Coeficiente de Sorensen-DiceEl coeficiente ó índice de Sørensen-Dice, también conocido por otros nombres tales como el índice de Sørensen,coeficiente de Dice, es un estadístico utilizado para comparar la similitud de dos muestras. Fue desarrolladoindependientemente por la botánicos Thorvald Sørensen y Lee Raymond Dice, que publicaron en 1948 y 1945respectivamente.
FórmulaLa fórmula original de Sørensen estaba destinadoaa ser aplicado a la presencia/ausencia de datos, y esta definida dela siguiente forma:
donde A y B son el número de especies en las muestras A y B, respectivamente, y C es el número de especiescompartidas por las dos muestras; QS es el cociente de similitud y varía de 0 a 1. Esta expresión se extiendefácilmente a la abundancia en lugar de la presencia / ausencia de especies. Esta versión cuantitativa del índice deSørensen también se conoce como Czekanowski índice. El índice de Sørensen es idéntico al coeficiente de Dice[1]
que siempre está en [0, 1] rango. El índice de Sørensen utilizado como una medida de distancia, 1 - QS, es idéntica ala distancia Hellinger y Bray Curtis disimilitud cuando se aplica a los datos cuantitativos.Puede ser visto como una medida de similitud sobre conjuntos:
No es muy diferente en forma del índice de Jaccard , pero tiene algunas propiedades diferentes. Por ejempli en lafunción oscila entre cero y uno, como Jaccard. A diferencia de Jaccard, la función correspondiente diferencia
Coeficiente de Sorensen-Dice 21
no es una distancia métrica adecuada, ya que no posee la propiedad de la desigualdad del triángulo. El contraejemplomás simple de esto se da por los tres conjuntos a, b, y a, b, la distancia entre los dos primeros son 1, y ladiferencia entre la tercera y cada uno de los otros son un tercio .De manera similar a Jaccard, el conjunto de operaciones se pueden expresar en términos de operaciones vectorialessobre vectores binarios A y B:
que da el mismo resultado en vectores binarios y también da una similitud más general métrica sobre vectores entérminos generales.Para los conjuntos de X e Y de palabras clave utilizadas en la recuperación de la información , el coeficiente puedeser definido como dos veces la información compartida (intersección) sobre la suma de cardinalidades :
Referencias[1] http:/ / www. sekj. org/ PDF/ anbf40/ anbf40-415. pdf
Conjunto de BorelUn conjunto de Borel es un elemento de la llamada σ-álgebra de Borel, la cual no es más que la mínima σ-algebraque contiene a una topología dada. Como caracterización alternativa, también se puede decir que un conjunto deBorel es cualquier conjunto obtenido mediante uniones e intersecciones numerables de conjuntos cerrados o abiertos.
IntroducciónDados dos conjuntos A y B, se dice que A es un subconjunto de B si todos los elementos de A pertenecen a B. Todavez que un conjunto X queda definido, quedan definidos también la colección formada por todos sus subconjuntos.Dicha colección se suele denotar por P(X) y contiene de manera trivial al propio X y al conjunto vacío.Dados dos subconjuntos de X podemos calcular su unión o su intersección para obtener otro subconjunto de X.Asimismo, dado un conjunto A podemos considerar su complementario X-A. Toda colección de subconjuntos de Xcerrada bajo uniones, intersecciones o complementos se llama un álgebra. Si también es cerrada bajo uniones eintersecciones numerables se llama σ-álgebra.Los conjuntos que pertenecen a una σ-álgebra no tienen por sí mismos ninguna propiedad especial. Es su relacióncon la colección de los conjuntos de la σ-álgebra lo que les hace especiales.

Conjunto de Cantor 22
Conjunto de Cantor
De izquierda a derecha, sucesivos pasos de la construccióngeométrica del conjunto de Cantor. Para ilustrar la definiciónnumérica se destacan cuatro puntos del conjunto (0, 2/3, 1 y
1/4) y su expresión en base 3.
El conjunto de Cantor, llamado por ser aporte de GeorgCantor[1] en 1883, es un destacado subconjunto fractal delintervalo real [0, 1], que admite dos definiciones equivalentes:
•• la definición numérica: es el conjunto de todos los puntosdel intervalo real [0,1] que admiten una expresión en base3 que no utilice el dígito 1.
•• la definición geométrica, de carácter recursivo, que eliminaen cada paso el segmento abierto correspondiente al terciocentral de cada intervalo.
Además de una curiosidad matemática, contradice unaintuición relativa al tamaño de objetos geométricos: es unconjunto de medida nula, pero no es vacío ni numerable.Lo que Cantor no sabía era que este conjunto ya había sidoestudiado en 1875 por un matemático dublinés, Henry JohnStephen Smith (1826-1883). Pero como Smith falleció y sudescubrimiento era prácticamente desconocido, fue Cantor elque quedo asociado a este conjunto.[2]
Construcción geométrica
Se construye de modo recursivo dando los siguientes pasos:• El primer paso es tomar el intervalo [0, 1].•• El segundo paso es quitarle su tercio interior, es decir el
intervalo abierto (1/3; 2/3).
•• El tercero es quitar a los dos segmentos restantes sus respectivos tercios interiores, es decir los intervalos abiertos(1/9; 2/9) y (7/9; 8/9).
•• Los pasos siguientes son idénticos: quitar el tercio de todos los intervalos que quedan. El proceso no tiene fin.La figura muestra las siete primeras etapas:
El conjunto de Cantor es el conjunto de los puntos restantes: entre ellos, es claro que los extremos de cadasubintervalo pertenecen 0 y 1, 1/3 y 2/3, 1/9, 2/9, 7/9 y 8/9, 1/27..., hay una infinidad de puntos: los 1/3n están todosincluidos, con n describiendo los naturales. Pero hay mucho más, por ejemplo 1/4 es un elemento del conjunto deCantor.

Conjunto de Cantor 23
Propiedades
MedidaSin embargo, el conjunto es pequeño cuando se considera su longitud: el intervalo inicial [0,1] mide 1, y a cada paso,se le quita un tercio, lo que hace que su longitud se multiplique por 2/3. la sucesión geométrica un = (2/3)n tiendehacia cero, Por lo tanto el conjunto de Cantor es de medida nula. Esto implica, en particular, que el conjunto deCantor no puede contener ningún intervalo de medida no nula.
CardinalidadPodemos demostrar el siguiente resultado paradójico: el conjunto de Cantor está en biyección con el segmento [0, 1],es decir, tiene tantos elementos como él.Para demostrar eso, vamos a construir una función suprayectiva desde el conjunto de Cantor (llamémosle C) alconjunto de los reales [0, 1]. De esta forma, la cardinalidad de C ha de ser no menor que la de [0, 1]. Por otra parte,como C es un subconjunto de [0, 1], C además ha de tener una cardinalidad no mayor. Por tanto se concluye que lascardinalidades de C y [0, 1] han de ser iguales.La función suprayectiva la construiremos así: Si se considera la escritura en base tres de los números, se nota que, alquitar siempre el segundo tercio de todos los segmentos, se suprime exactamente los números que tienen un 1 en suescritura trienal: el intervalo (1/3; 2/3) corresponde a los números que empiezan por 0,1 (menos el 1/3 que tambiénse puede escribir 0, 02222222222..... en base tres); el intervalo (1/9;2/9) corresponde a los números que empiezanpor 0,01, el (7/9;8/9) por 0,21 y así sucesivamente.La suprayección se construye así: a cada número escrito con sólo ceros y dos se le hace corresponder el número enbase dos obtenido remplazando todos sus dos por unos. Por ejemplo, 0,2002 en base tres (que vale 2/3 + 2/81 =56/81) tiene como imagen 0,1001 en base dos (que vale 1/2 + 1/16 = 9/16).Se obtiene así todos los números en base dos que empiezan por 0,... y que tienen ceros o/y unos después de la coma:¡es el intervalo [0,1] entero!
Propiedades topológicasEl conjunto de Cantor es cerrado en los reales, al ser el complemento de la unión de abiertos.[3] Al ser tambiénacotado, por aplicación del teorema de Heine-Borel, puede afirmarse que es compacto. Se demuestra que es unconjunto denso en ninguna parte.
AutosimilaridadEl conjunto de Cantor puede considerarse también como el atractor asociado al IFS (sistema de funciones iteradas)formado por las aplicaciones contractivas , y , ambas definidas sobre el compacto
[0,1].[4]
Observamos que la imagen del conjunto de Cantor por la homotecia de centro 0 y razón 1/3 es una parte del propioconjunto de Cantor. Esto es una manifestación de autosimilaridad, que es una de las propiedades básicas de losfractales. Su dimensión de Hausdorff es menor que uno, concretamente Log(2)/Log(3)=0.631.
Conjunto de Cantor 24
Generalizaciones
En dimensión unoEn lugar de eliminar en cada paso la tercera parte central, podríamos plantearnos eliminar cualquier otro porcentajefijo (distinto de 0% o de 100%) de la zona central. Los conjuntos resultantes siguen siendo homeomorfos al conjuntode Cantor. Sin embargo, mientras la longitud del intervalo eliminado sea mayor o igual a la tercera parte, la medidade Lebesgue del conjunto será cero; en otro caso, la medida será positiva (más específico, la medida de Lebesgue esde 1-a, donde a es la razón de longitudes entre el intervalo eliminado en el primer paso y 1/3).Eliminando porcentajes que disminuyan progresivamente en cada paso, podemos construir conjuntos tambiénhomeomorfos al conjunto de Cantor, pero con medida de Lebesgue positiva. Un ejemplo de dicha construcción es elconjunto de Smith-Volterra-Cantor.
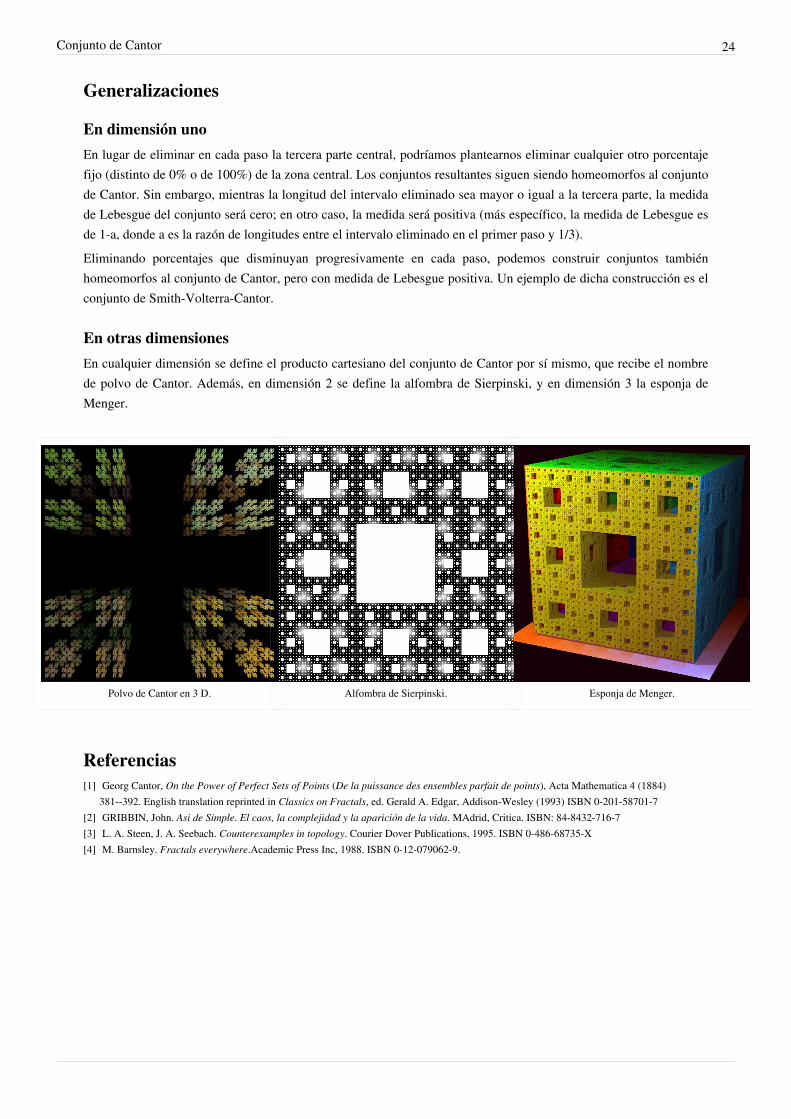
En otras dimensionesEn cualquier dimensión se define el producto cartesiano del conjunto de Cantor por sí mismo, que recibe el nombrede polvo de Cantor. Además, en dimensión 2 se define la alfombra de Sierpinski, y en dimensión 3 la esponja deMenger.
Polvo de Cantor en 3 D. Alfombra de Sierpinski. Esponja de Menger.
Referencias[1] Georg Cantor, On the Power of Perfect Sets of Points (De la puissance des ensembles parfait de points), Acta Mathematica 4 (1884)
381--392. English translation reprinted in Classics on Fractals, ed. Gerald A. Edgar, Addison-Wesley (1993) ISBN 0-201-58701-7[2] GRIBBIN, John. Asi de Simple. El caos, la complejidad y la aparición de la vida. MAdrid, Critica. ISBN: 84-8432-716-7[3] L. A. Steen, J. A. Seebach. Counterexamples in topology. Courier Dover Publications, 1995. ISBN 0-486-68735-X[4] M. Barnsley. Fractals everywhere.Academic Press Inc, 1988. ISBN 0-12-079062-9.
Conjunto de Nikodym 25
Conjunto de NikodymEn matemáticas, un conjunto de Nikodym es un conjunto N del cuadrado unidad S del plano euclídeo tal que• la medida de Lebesgue de N es 1 y• para cada punto x de N, existe una recta cuya intersección con N es únicamente x.La existencia de tal conjunto fue probada por primera vez por Nikodym en 1927. Los conjuntos de Nikodym estánestrechamente relacionados con los conjuntos de Kakeya (también conocidos como conjuntos de Besicovitch).
Referencias• Falconer, Kenneth J. (1986). The geometry of fractal sets. Cambridge Tracts in Mathematics 85. Cambridge:
Cambridge University Press. pp. p. 100. ISBN 0-521-25694-1. MR 867284 [1]
Referencias[1] http:/ / www. ams. org/ mathscinet-getitem?mr=867284
Conjunto de Smith-Volterra-Cantor
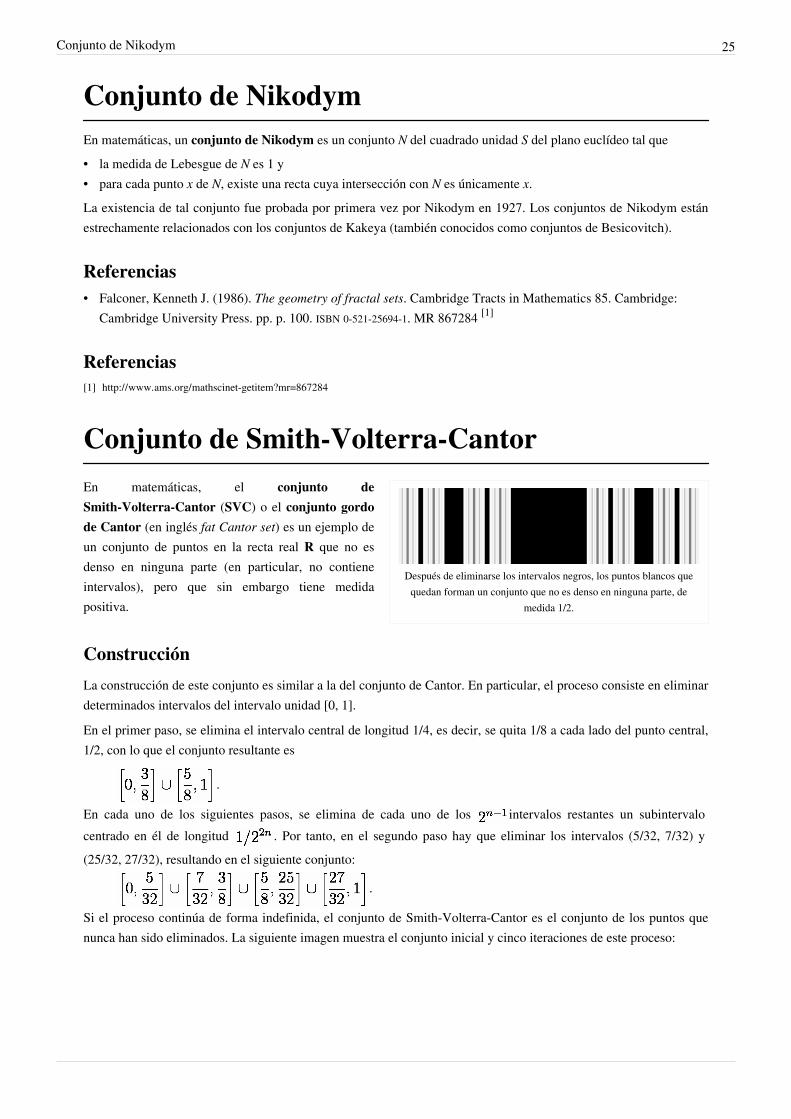
Después de eliminarse los intervalos negros, los puntos blancos quequedan forman un conjunto que no es denso en ninguna parte, de
medida 1/2.
En matemáticas, el conjunto deSmith-Volterra-Cantor (SVC) o el conjunto gordode Cantor (en inglés fat Cantor set) es un ejemplo deun conjunto de puntos en la recta real R que no esdenso en ninguna parte (en particular, no contieneintervalos), pero que sin embargo tiene medidapositiva.
Construcción
La construcción de este conjunto es similar a la del conjunto de Cantor. En particular, el proceso consiste en eliminardeterminados intervalos del intervalo unidad [0, 1].
En el primer paso, se elimina el intervalo central de longitud 1/4, es decir, se quita 1/8 a cada lado del punto central,1/2, con lo que el conjunto resultante es
.
En cada uno de los siguientes pasos, se elimina de cada uno de los intervalos restantes un subintervalocentrado en él de longitud . Por tanto, en el segundo paso hay que eliminar los intervalos (5/32, 7/32) y(25/32, 27/32), resultando en el siguiente conjunto:
.
Si el proceso continúa de forma indefinida, el conjunto de Smith-Volterra-Cantor es el conjunto de los puntos quenunca han sido eliminados. La siguiente imagen muestra el conjunto inicial y cinco iteraciones de este proceso:

Conjunto de Smith-Volterra-Cantor 26
PropiedadesPor construcción, el conjunto de Smith-Volterra-Cantor no contiene intervalos. Durante el proceso, se eliminan delintervalo inicial intervalos de longitud total
.
Esto muestra que el conjunto de los puntos que quedan tiene medida positiva de 1/2.
Otros conjuntos gordos de CantorEn general, se puede eliminar rn de cada uno de los subintervalos restantes en la n-ésima iteración del algoritmo paraacabar con un conjunto similar al de Cantor. Este conjunto tendrá medida positiva si y sólo si la suma de la sucesiónes menor que la medida del intervalo inicial.
Temas relacionados• El conjunto SVC se utiliza en la construcción de la función de Volterra.[1]
• El conjunto SVC es un ejemplo de conjunto compacto que no es medible por Jordan.• La función indicador del conjunto SVC es un ejemplo de función acotada que no es integrable por Riemann en (0,
1). Es más, no es igual en casi todas partes a una función integrable por Riemann.
Referencias[1] Wrestling with the Fundamental Theorem of Calculus: Volterra's function (http:/ / www. macalester. edu/ ~bressoud/ talks/ Volterra-4. pdf),
conferencia de David Marius Bressoud
Conjunto de Vitali 27
Conjunto de VitaliEn teoría de la medida, un conjunto de Vitali es un ejemplo básico de conjunto de números reales que no esLebesgue-medible. El teorema de Vitali es el teorema de existencia de dichos conjuntos. Es así llamado en honor aGiuseppe Vitali.A pesar del nombre, hay muchos conjuntos de Vitali. Su existencia se demuestra usando el axioma de elección, loque lo hace un resultado no constructivo: es imposible describir explícitamente un conjunto de Vitali.
La importancia de los conjuntos no mediblesCiertos conjuntos tienen un "tamaño" definido; por ejemplo, el intervalo [0, 1] se asume con longitud 1, y en general,un intervalo [a, b], con a ≤ b, se asume con longitud b − a. Si se piensa en tales intervalos como barras de metal,tendrán asimismo masas definidas. Si la barra [0, 1] pesa 1 kilo, la [3, 9] pesará 6 kilos. El conjunto [0, 1] ∪ [2, 3]está compuesto por dos barras de 1 kilo cada una, con lo que su peso total será de 2 kilos; en términos matemáticos,su longitud total es de 2.Aquí surge una pregunta natural: si E es un subconjunto arbitrario de la recta real, ¿necesariamente tendrá unalongitud? Como ejemplo, uno se puede preguntar por la longitud del conjunto de números racionales. Como estánfinamente esparcidos por la recta real, cualquier respuesta podría parecer razonable a primera vista.La teoría matemática para responder a estas cuestiones de manera correcta y coherente resulta ser la teoría de lamedida. En este marco, la medida de Lebesgue, que asigna el peso b − a al intervalo [a, b], le asignará un peso de 0al conjunto de los racionales (de hecho, todo conjunto numerable tendrá longitud 0). Todo conjunto que tenga unpeso bien definido se dice medible. De la construcción de la medida de Lebesgue (por ejemplo, usando una medidaexterior), sin embargo, no es evidente que haya o no conjuntos no medibles.
Construcción y demostraciónSi x e y son reales, y x − y es racional, se dirá que x e y son equivalentes, lo que se denota por x ~ y; evidentemente, ~es una relación de equivalencia. Por lo tanto, las clases de equivalencia de los reales, definidas por [x] = y ∈ R | x ~y para x ∈ R, forman una partición de R. Invocando el axioma de elección, se puede tomar un conjunto V ⊆ [0, 1]que contenga exactamente un miembro representativo de cada clase de equivalencia; esto es, que para cada real x, elconjunto V ∩ [x] es un conjunto unitario.Los conjuntos V así definidos se denominan conjuntos de Vitali. Hay por supuesto infinitas posibilidades para V. Loimportante es que el axioma de elección estipula la existencia de al menos una de ellas.Ahora, para demostrar que un conjunto de Vitali dado, V, no es Lebesgue-medible, se asumirá que sí lo es. Primeroveamos que de la definición de conjuntos medibles, se puede demostrar que todos ellos tienen las siguientes dospropiedades:1. Si Ai es una secuencia numerable de conjuntos medibles disjuntos dos a dos, entonces
2. La medida de Lebesgue es invariante por translación; esto es, para todo real x y todo conjunto medible A, λ(A) =λ(A + x).
De la hipótesis de que V es Lebesgue-medible, se puede demostrar algo absurdo, a saber, que a + a + a +... (unasuma infinita de números idénticos) está entre 1 y 3. Con ello, la única hipótesis sin demostración (que V es medible)será la errónea.Primeramente, sea q1, q2,... una enumeración de los racionales en [−1, 1] (pues este conjunto es numerable). Por la construcción de V, los conjuntos Vk = V + qk, con k natural, son disjuntos dos a dos (de lo contrario habría dos

Conjunto de Vitali 28
números equivalentes en V, contradiciendo su definición). Por otro lado, se puede demostrar que
Para ver la primera inclusión, sea x ∈ [0, 1] y sea v el único elemento de [x] ∩ V; x − v es entonces un racional quenecesariamente ha de estar entre −1 y 1, por ejemplo qk, y por lo tanto x ∈ Vk. La segunda inclusión es consecuenciadel hecho que V ⊆ [0, 1].Ahora bien, como la medida λ es contablemente aditiva y no negativa, tiene la propiedad de la monotonía; esto es, siA⊆B, entonces λ(A)≤λ(B). Por lo tanto,
Por otro lado, gracias a la aditividad de λ, se tiene también que
puesto que los Vk son disjuntos. Como λ es invariante por translación, λ(Vk) = λ(V) para todo k. Reemplazando en losresultados anteriores, queda
Esto es, una suma infinita de un solo término real y no negativo está entre 1 y 3; ahora bien, si el término fuera cero,la suma daría asimismo cero y sería por lo tanto inferior a 1, mientras que si fuera distinto de cero, la suma daríainfinito y por lo tanto sería superior a 3.Esta conclusión es absurda, con lo cual, V no puede ser medible.
ErgodicidadLa ergodicidad es una propiedad muy importante de algunos sistemas mecánicos que permite justificar ciertosresultados de la mecánica estadística. Un sistema es ergódico si el único conjunto invariante de medida no nula de lahipersuperficie de energía constante del espacio de las fases es toda la hipersuperficie de energía constante.Los sistemas ergódicos tienen el interés de que en ellos el promedio temporal de ciertas magnitudes puedenobtenerse como promedios sobre el espacio de estados lo cual simplifica las predicciones sobre los mismos.
Definición de sistema ergódicoUn sistema ergódico se puede representar por un espacio de estados (al modo de un espacio fásico) y ladinámica del sistema se representa por un conjunto de aplicaciones que conservan la medida de un conjunto:
Que asigna a cada estado el estado futuro pasado un tiempo t. Las aplicaciones anteriores con la composción defunciones forman un semigrupo (y si están definidas las inversas un grupo uniparamétrico). Un sistema es ergódicosi no existe un subconjunto del espacio de estados con una medida finita que sea invariante por el conjunto deaplicaciones, en otras palabras, la evolución de un conjunto de estados que ocupe un volumen finito de dichoespacio, necesariamente se expande por todo el espacio al evolucionar cada uno de sus puntos.
Más formalmente, sea un espacio de medida en el que se ha definido un grupo uniparamétrico (oalternativamente semigrupo) de aplicaciones medibles. Y sea un conjunto invariante por las aplicacioneses decir tal que:

Ergodicidad 29
Entonces el sistema es ergódico si y solamente si:
ó Es decir, si los únicos conjuntos invariantes son o todo el espacio (trivialmente) o conjuntos de medida nula (esdecir, conjuntos neglibles probabilísticamente).
Ergodicidad y teorema ergódico de BirkhoffEn los sistemas ergódicos es válido el teorema de Birkhoff que permite sustituir promedios temporales del sistemapor un promedio espacial sobre una región del espacio de las fases. El enunciado del teorema ergódico, debido aBirkhoff (1931) es el siguiente:
Sea una transformación que preserva la medida en un espacio de medida
. Se puede considerar el "promedio temporal" de una función f que se comporta lo suficientemente bien(más precisamente, ). Este "promedio temporal" se define como la medida sobre las iteraciones de Tempezando en cierto punto x y cuando existe es:
Si se considera además el "promedio espacial" de f, definido como:
donde μ es la medida de probabilidad del espacio:
Espacio de medidaUn espacio de medida es un conjunto para el que se ha definido una σ-álgebra de conjuntos medibles y una funciónmedida concreta que asigna un valor real o medida a cada elemento de la σ-álgebra.
Ejemplos• La tripleta donde es el conjunto de los números reales, la σ-álgebra boreliana y la medida de
Lebesgue basada en la longitud de los intervalos, constituyen un espacio de medida.• Un espacio probabilístico es un caso particular de espacio de medida, donde todo conjunto medible tiene una
medida o "tamaño" finito, dado por su probabilidad.

Espacios Lp 30
Espacios LpLos espacios son los espacios vectoriales normados más importantes en el contexto de la teoría de la medida yde la integral de Lebesgue. Reciben también el nombre de espacio de Lebesgue por el matemático Henri Lebesgue.
DefiniciónConsideremos un espacio de medida. Se define el espacio vectorial:
Como el espacio de todas las funciones medibles que cumplen:
Asimismo, se define el espacio como el espacio de las funciones medibles que verifican:
Es decir, aquellas funciones medibles acotadas excepto en un conjunto de medida nula. Una norma natural paradefinir en estos espacios sería:
, si , y
Sin embargo, una aplicación así definida no resulta norma, ya que no se cumple , puescualquier función que sea igual a la función nula, salvo en un conjunto de medida nula, tendrá norma cero.Así, se define la siguiente relación de equivalencia sobre : . Se prueba queefectivamente es una relación de equivalencia, y se defina , i.e., el espacio vectorial cuyos elementosson las clases de equivalencia de la relación . Considerando entonces sobre las normas anteriormentedefinidas (donde es cualquier representante de la clase de equivalencia), se prueba que resulta ser norma yque su valor no depende del representante de la clase de equivalencia escogido. Usualmente no se hace distinciónentre función y clase de equivalencia en este contexto.
Propiedades1. es un espacio de Banach.
2. es un Espacio de Hilbert, dotado del producto interno .
3. Si , entonces se tiene que .4. Si es reflexivo.5. Si denotamos por al espacio de las funciones simples, se cumple que es denso en .
6. Si , el dual topológico de es donde es tal que .
7. Si el espacio de medida es -finito, entonces el dual de se identifica con .8. Si es un espacio topológico localmente compacto separado, y es una medida regular, entonces
(el espacio de las funciones continuas a soporte compacto) es denso en con .9. El espacio de las funciones infinitamente derivables en un abierto a soporte compacto y que están en
con , es denso en , es decir .

Esperanza condicional 31
Esperanza condicionalEn teoría de la probabilidad, una esperanza condicional (también conocido como valor esperado condicional omedia condicional) es el valor esperado de una variable aleatoria verdadera con respecto a una distribución deprobabilidad condicional.El concepto de esperanza condicional es extremadamente importante en la Teoría de la medida de AndréiKolmogórov -medida teórica definición de la teoría de probabilidades. De hecho, el propio concepto de probabilidadcondicional es en realidad define en términos de esperanza condicional.
IntroducciónSean X e Y dos variables aleatorias discretas, a continuación, la expectativa condicional de X dado el caso Y = y esuna función de y sobre el rango de Y
donde es el rango de X.Si ahora X es una variable aleatoria continua , mientras que Y sigue siendo una variable discreta, la expectativacondicional es:
donde es la densidad condicional de dado .Un problema surge cuando Y es continua . En este caso, la probabilidad P (Y = y) = 0, y la paradoja deBorel-Kolmogorov demuestra la ambigüedad de intentar definir probabilidad condicional a lo largo de estas líneas.Sin embargo, la expresión anterior puede ser reorganizado:
y aunque esto es trivial para valores individuales de y (ya que ambos lados son iguales a cero), se debe mantenerpara cualquier subconjunto medible B del dominio de Y que:
De hecho, esta es una condición suficiente para definir tanto la expectativa condicional y probabilidad condicional.
Función de Cantor 32
Función de CantorEn matemáticas, la función de Cantor, llamada así en honor de Georg Cantor, es un ejemplo de función matemáticaque es continua pero no absolutamente continua. También se la conoce como la escalera del Diablo.La función de Cantor guarda una estrecha relación con el conjunto de Cantor.
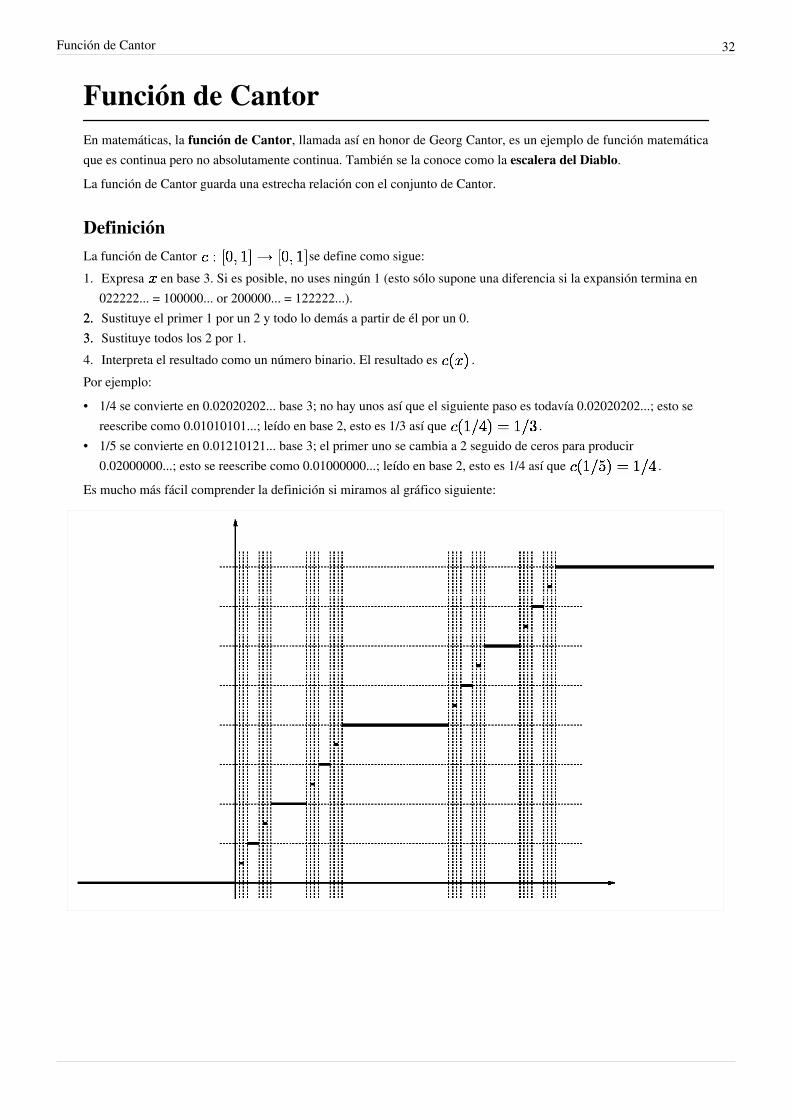
DefiniciónLa función de Cantor se define como sigue:1. Expresa en base 3. Si es posible, no uses ningún 1 (esto sólo supone una diferencia si la expansión termina en
022222... = 100000... or 200000... = 122222...).2.2. Sustituye el primer 1 por un 2 y todo lo demás a partir de él por un 0.3.3. Sustituye todos los 2 por 1.4. Interpreta el resultado como un número binario. El resultado es .Por ejemplo:• 1/4 se convierte en 0.02020202... base 3; no hay unos así que el siguiente paso es todavía 0.02020202...; esto se
reescribe como 0.01010101...; leído en base 2, esto es 1/3 así que .• 1/5 se convierte en 0.01210121... base 3; el primer uno se cambia a 2 seguido de ceros para producir
0.02000000...; esto se reescribe como 0.01000000...; leído en base 2, esto es 1/4 así que .Es mucho más fácil comprender la definición si miramos al gráfico siguiente:
Función de Cantor 33
Propiedades• La función de Cantor desafía la intuición más ingenua sobre la continuidad y la medida; aunque es continua en
todos los puntos y tiene derivada cero en casi todo punto, va de 0 a 1 a medida que va de 0 a 1, y toma todoslos valores intermedios. La función de Cantor es el ejemplo más comúnmente citado de una función real que esuniformemente continua (y por tanto también continua) pero no absolutamente continua. No tiene derivada enningún punto del conjunto de Cantor; es constante en los intervalos de la forma:
:
y cualquier punto que no esté en el conjunto de Cantor está en uno de dichos intervalos, conque su derivadafuera del conjunto de Cantor es cero.
• Extendida por la izquierda con valor 0 y por la derecha con valor 1, es la función de distribución de probabilidadde una variable aleatoria uniformemente distribuida en el conjunto de Cantor. Esta distribución, llamada ladistribución de Cantor, no posee parte discreta.
• Sin embargo, ninguna parte no constante de la función de Cantor se puede representar como la integral de unafunción de densidad de probabilidad.
• La función de Cantor es el ejemplo estándar de función singular.• La función de Cantor es monótona creciente, por lo que en particular su gráfica define una curva rectificable. La
longitud de arco de la misma es 2.
Definiciones alternativas
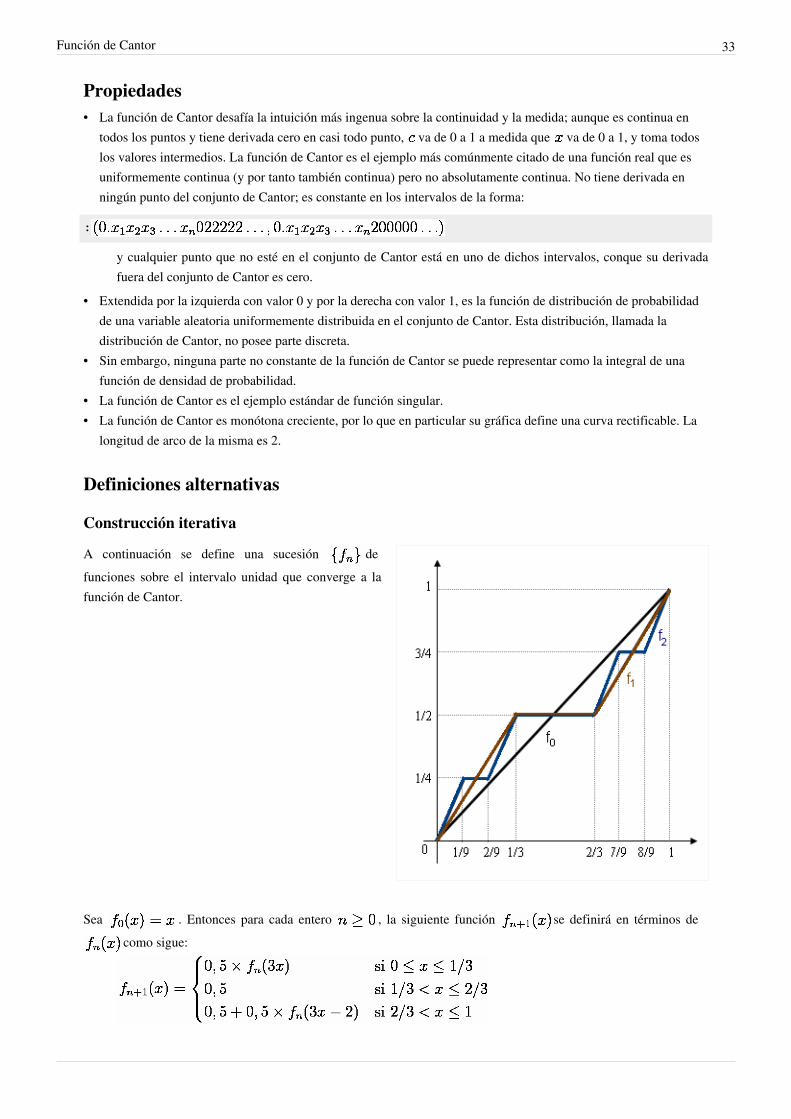
Construcción iterativa
A continuación se define una sucesión defunciones sobre el intervalo unidad que converge a lafunción de Cantor.
Sea . Entonces para cada entero , la siguiente función se definirá en términos decomo sigue:

Función de Cantor 34
En realidad los tres casos son compatibles en los extremos 1/3 y 2/3, porque y para todo , por inducción. Se puede comprobar que converge puntualmente a la función de Cantor definida anteriormente.Más aún, la convergencia es uniforme. En efecto, separando los tres casos, en consonancia con la definición de
, se puede ver que:
Si denota la función límite, se sigue que, para todo ,
Nótese también que la elección de la función inicial no importa realmente, siempre y cuando ,y esté acotada.
Volumen fractalLa función de Cantor está estrechamente relacionada con el conjunto de Cantor. El conjunto de Cantor puededefinirse como el conjunto de los números del intervalo [0,1] que no contienen el 1 en su desarrollo en base tres.Resulta que el conjunto de Cantor es un fractal con infinitos (no numerable) puntos (volumen de dimensión cero),pero longitud cero (volumen de dimensión uno). Sólo el volumen D-dimensional (en el sentido de la medidaHausdorff) toma un valor finito, donde:
es la dimensión fractal de . Podemos definir la función de Cantor alternativamente como el volumenD-dimensional de las secciones del conjunto de Cantor
GeneralizacionesSea
un desarrollo diádico del número en términos de dígitos binarios . Ahora consideremosla función
Para , la inversa de la función es la función de Cantor. Esto es, es lafunción de Cantor. En general, para cualquier , tiene un aspecto similar a la función de Cantorpuesta de lado, con la anchura de los pasos aumentando a medida que se aproxima a cero.La función interrogación de Minkowski se parece visualmente a la función de Cantor, como si fuera una función deCantor «suavizada», y puede construirse pasando de una expansión en fracciones continuas a una expansión binaria,de la misma forma que la función de Cantor puede construirse pasando de una expansión ternaria a una expansiónbinaria. La función interrogación posee la interesante propiedad de tener derivadas que se anulan en todos losnúmeros racionales.
Función de Cantor 35
Enlaces externos• Bogomolny, Alexander. «Cantor set and function [1]» (en inglés). Interactive Mathematics Miscellany and Puzzles
[2].• Rivers, Douglas. «Cantor Function [3]» (en inglés). The Wolfram Demonstrations Project. Wolfram Research.• Weisstein, Eric W. «Cantor Function [4]» (en inglés). MathWorld. Wolfram Research.
Referencias[1] http:/ / www. cut-the-knot. org/ do_you_know/ cantor. shtml[2] http:/ / www. cut-the-knot. org/ index. shtml[3] http:/ / demonstrations. wolfram. com/ CantorFunction/[4] http:/ / mathworld. wolfram. com/ CantorFunction. html
Función de cuadrado integrableEn análisis matemático, una función de una variable real con valores reales o complejos se dice de cuadradosumable o también de cuadrado integrable sobre un determinado intervalo, si la integral del cuadrado de sumódulo, definida en el intervalo de definición, converge.
Este concepto se extiende a las funciones definidas sobre un espacio de medida que tiene valores en un espaciovectorial de dimensión finita.
PropiedadesEl conjunto de todas las funciones medibles de cuadrado integrable sobre un dominio dado forman un espacio deHilbert sumable, también llamado espacio L2.
AplicacionesLa condición de cuadrado sumable es particularmente útil en mecánica cuántica ya que constituye la base para lasfunciones que describen el comportamiento de los sistemas físicos, consecuencia de la interpretación probabilísticade la mecánica cuántica. Por ejemplo, para determinar el comportamiento en el espacio de una partícula (sin espín)se utiliza la función de onda para la cual debe existir y tener un valor fínito una integral de la forma:
Esta noción se generaliza a las funciones p-medibles para un número p real positivo, siendo las de cuadrado sumablelas que corresponden con el caso particular p=2.
Enlaces externos• Portal:matemática. Contenido relacionado con matemática.

Función indicatriz 36
Función indicatriz
Gráfico de una función indicatríz que muestra a un subconjunto de los puntos de uncuadrado en (en rojo), donde los puntos tienen coordenada z=1 (color
ocre), mientras que los puntos del cuadrado tienen coordenada z=0 (rojos).
En matemáticas, la función indicatrizo función característica de unsubconjunto es una funcióndefinida en el conjunto , y queindica la pertenencia, o no, de cadaelemento de al subconjunto , alasignar el valor 1 a todos los elementosde y el valor 0 a todos loselementos de (no incluidos en
).
Definición
La función indicatriz del subconjuntodel conjunto es una función
definida como
El corchete de Iverson permite una notación equivalente, , que se puede usar en lugar de La función en ocasiones se expresa o o incluso . (La letra se usa porque es la letra inicial de lapalabra característica en griego.)
Propiedades básicasLa functión indicatriz o característica de un subconjunto de un conjunto , asocia elementos de alconjunto .La correspondencia es sobreyectiva solo cuando es un subconjunto propio de . Si , entonces
. Por un argumento similar, si entonces .En lo siguiente, el punto representa multiplicación, 1·1 = 1, 1·0 = 0 etc. "+" y "−" representan suma y resta. " " y" " son intersección y unión respectivamente.Si y son dos subconjuntos de , entonces
(intersección de conjuntos)(unión de conjuntos)
(diferencia simétrica de conjuntos)(complemento de un conjunto)
Pero si tomamos como el anillo con sus operaciones de suma y producto habituales, entonces:(intersección de conjuntos)
(diferencia simétrica de conjuntos)mostrando que la función que asigna a cada subconjunto del conjunto potencia de su función característica es un isomorfismo de anillos entre el conjunto potencia de (con la intersección y la diferencia simétrica de conjuntos

Función indicatriz 37
como producto y suma respectivamente) y el conjunto de las funciones de en con la suma y producto de funcionesdefinidas por las operaciones dentro del anillo punto a punto sobre todo .Continuando con el complemento de conjuntos, y generalizando: supongamos que es una colección desubconjuntos de ; si denotamos como el conjunto de índices, entonces:
, para todo .
es claramente un producto de s y s. Este producto vale 1 precisamente para los que no pertenecen aninguno de los conjuntos y en caso contrario. Esto es,
Expandiendo el producto del lado izquierdo,
donde es la cardinalidad de . Esta es una forma del principio de inclusión-exclusión.Como sugiere el ejemplo anterior, la función indicatriz es un elemento útil para notación en combinatoria. Lanotación se usa en otras partes también, por ejemplo en teoría de la probabilidad: si es un espacio deprobabilidad con medida de probabilidad y es un conjunto medible, entonces se convierte en unavariable aleatoria cuyo valor esperado es igual a la probabilidad de :
Esta identidad se usa en una prueba simple de la desigualdad de Markov.En muchos casos, como en teoría del orden, la inversa de la función indicatriz puede definirse.

Función localmente integrable 38
Función localmente integrableEn matemáticas, un función localmente integrable es una función que es integrable en cualquier conjunto compactocontenido en su dominio de definición. La importancia del concepto reside en el hecho de que se ignora elcomportamiento de la función en el infinito, y se atiende sólo a su comportamiento local.
Definición formalMás formalmente, sea un conjunto abierto del espacio euclídeo y sea una función medible en elsentido de Lebesgue. Si la integral de Lebesgue:
es finita para todo conjunto compacto , entonces es una función localmente integrable. El conjunto detodas las funciones localmente integrable es un espacio vectorial designado por:
PropiedadesTeorema. Toda función del espacio , , donde es un conjunto abierto de es localmenteintegrable. Para ver esto, basta considerar la función característica de un conjunto compacto de : entonces,para
donde
• es un número positivo tal que para un p dado tal que • es la medida de Lebesgue del conjunto compacto Entonces por la desigualdad de Hölder se tiene que:
Y por tanto:
Nótese que puesto que la siguiente desigualdad es cierta:
la afirmación se sigue también para funciones que pertenecen al espacio para cada conjunto compactode .
Referencia• Strichartz, Robert S. (2003) (en inglés). A Guide to Distribution Theory and Fourier Transforms. World Scientific
Publishers. ISBN 981-238-430-8.

Función medible 39
Función medibleEn teoría de la medida, una función medible es aquella que preserva la estructura entre dos espacios medibles.Formalmente, una función entre dos espacios medibles se dice medible si la preimagen (también llamada imageninversa) de cualquier conjunto medible es a su vez medible.
Funciones medibles especiales• Si y son espacios de Borel, entonces toda función medible es llamada
función de Borel (o función Borel-medible). Toda función continua es de Borel, pero no toda función de Borel escontinua.
• Una función Lebesgue-medible es una función , donde es la sigma-álgebra de losconjuntos Lebesgue-medibles y es el álgebra de Borel en los números complejos . Éstas funciones son deinterés en el análisis matemático debido a que siempre pueden ser integradas.
• Las variables aleatorias son por definición funciones medibles cuyo dominio es un espacio muestral donde se hadefinido una sigma-álgebra y contradominio en con la medida de Lebesgue.
Propiedades de las funciones medibles•• La suma y producto de dos funciones complejas medibles es también medible. Debido a esto también lo es el
cociente (siempre que no haya división por cero).
• Si y son medibles entonces la composición esmedible. Esto no es necesariamente cierto cuando las sigma-álgebras no coinciden, es decir, si
y entonces podría no ser medible aunque f y g sí losean.
Referencias1. Strichartz, Robert (2000). The Way of Analysis. Jones and Bartlett. ISBN 0-7637-1497-6.2. Folland, Gerald B. (1999). Real Analysis: Modern Techniques and their Applications. Wiley. ISBN 0471317160.3. Billingsley, Patrick (1995). Probability and Measure. Wiley. ISBN 0-471-00710-2.4. Royden, H. L. (1988). Real Analysis. Prentice Hall. ISBN 0-02-404151-3.

Hipervolumen 40
HipervolumenEn matemáticas, el hipervolumen de n-dimensiones es una medida que generaliza el concepto de volumen aespacios de dimensión superior a tres. El hipervolumen se define a partir de la medición de distancias definidas porel tensor métrico o en su defecto por una función distancia adecuada.
En espacio euclídeoUn espacio euclídeo al ser un espacio métrico admite una medida del volumen mediante suma de volúmenes dehiperesferas. Consideremos un conjunto acotado del espacio euclídeo, y consideremos una colecciónnumerable de bolas abiertas centradas que recubre completamente a , es decir cuya unión contiene al conjunto
. Si son los diámetros de la colección de bolas numerable entonces el volumen del conjunto cumple:(1)
Donde la función viene dado en términos de la función gamma:(2)
Considerando todos los posibles recubrimientos numerables y tomando el ínfimo respecto a ellos entonces se puedecalcular el hipervolumen:
(3)
Igualmente pueden considerarse colecciones numerables o finitas contenidas en el conjunto y tomar el supremorespecto a las colecciones de bolas contenidas en el conjunto.
En variedades de RiemannPara que en un espacio de n-dimensiones, no necesariamente euclideano, se pueda definir el concepto dehipervolumen deben darse ciertas condiciones. Para poder definir un cálculo de hipervolúmenes mediante el cálculointegral es necesario que en el espacio donde pretendemos medir volúmenes se haya definido un tensor métrico:
Eso permite hace que el espacio tenga estructura de variedad de Riemann y en él pueda definirse la llamada formade volumen que es la n-forma siguiente:
En esas condiciones el hipervolumen de una región Ω (con frontera suficientemente regular) viene definida por laintegral:
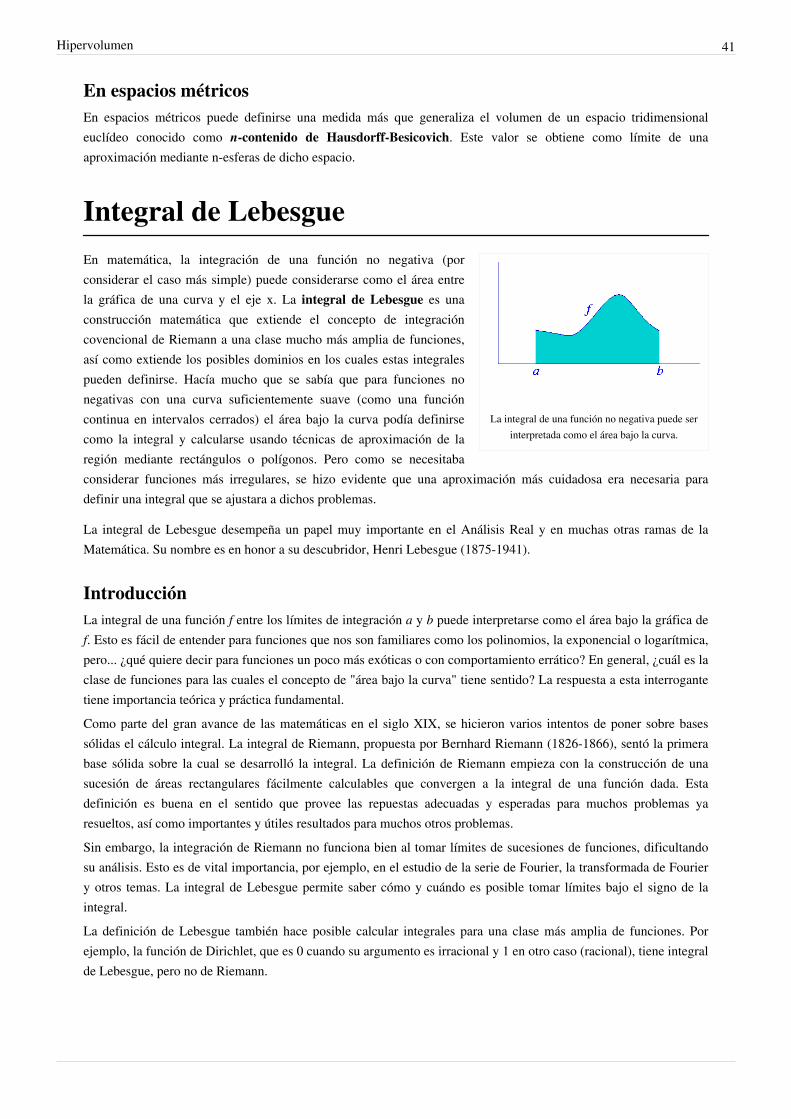
Hipervolumen 41
En espacios métricosEn espacios métricos puede definirse una medida más que generaliza el volumen de un espacio tridimensionaleuclídeo conocido como n-contenido de Hausdorff-Besicovich. Este valor se obtiene como límite de unaaproximación mediante n-esferas de dicho espacio.
Integral de Lebesgue
La integral de una función no negativa puede serinterpretada como el área bajo la curva.
En matemática, la integración de una función no negativa (porconsiderar el caso más simple) puede considerarse como el área entrela gráfica de una curva y el eje x. La integral de Lebesgue es unaconstrucción matemática que extiende el concepto de integracióncovencional de Riemann a una clase mucho más amplia de funciones,así como extiende los posibles dominios en los cuales estas integralespueden definirse. Hacía mucho que se sabía que para funciones nonegativas con una curva suficientemente suave (como una funcióncontinua en intervalos cerrados) el área bajo la curva podía definirsecomo la integral y calcularse usando técnicas de aproximación de laregión mediante rectángulos o polígonos. Pero como se necesitabaconsiderar funciones más irregulares, se hizo evidente que una aproximación más cuidadosa era necesaria paradefinir una integral que se ajustara a dichos problemas.
La integral de Lebesgue desempeña un papel muy importante en el Análisis Real y en muchas otras ramas de laMatemática. Su nombre es en honor a su descubridor, Henri Lebesgue (1875-1941).
IntroducciónLa integral de una función f entre los límites de integración a y b puede interpretarse como el área bajo la gráfica def. Esto es fácil de entender para funciones que nos son familiares como los polinomios, la exponencial o logarítmica,pero... ¿qué quiere decir para funciones un poco más exóticas o con comportamiento errático? En general, ¿cuál es laclase de funciones para las cuales el concepto de "área bajo la curva" tiene sentido? La respuesta a esta interrogantetiene importancia teórica y práctica fundamental.Como parte del gran avance de las matemáticas en el siglo XIX, se hicieron varios intentos de poner sobre basessólidas el cálculo integral. La integral de Riemann, propuesta por Bernhard Riemann (1826-1866), sentó la primerabase sólida sobre la cual se desarrolló la integral. La definición de Riemann empieza con la construcción de unasucesión de áreas rectangulares fácilmente calculables que convergen a la integral de una función dada. Estadefinición es buena en el sentido que provee las repuestas adecuadas y esperadas para muchos problemas yaresueltos, así como importantes y útiles resultados para muchos otros problemas.Sin embargo, la integración de Riemann no funciona bien al tomar límites de sucesiones de funciones, dificultandosu análisis. Esto es de vital importancia, por ejemplo, en el estudio de la serie de Fourier, la transformada de Fouriery otros temas. La integral de Lebesgue permite saber cómo y cuándo es posible tomar límites bajo el signo de laintegral.La definición de Lebesgue también hace posible calcular integrales para una clase más amplia de funciones. Porejemplo, la función de Dirichlet, que es 0 cuando su argumento es irracional y 1 en otro caso (racional), tiene integralde Lebesgue, pero no de Riemann.

Integral de Lebesgue 42
Construcción de la integral de LebesgueLa exposición que sigue da la definición más común de esta integral, en la que la teoría de integración se componede dos partes, a saber:1.1. Una teoría de conjuntos medibles y medidas en estos conjuntos.2.2. Una teoría de funciones medibles e integrales en estas funciones.
Teoría de la medidaLa teoría de la medida se creó para disponer de un análisis detallado de la noción de longitud de los subconjuntos depuntos de la recta real y, de forma más general, área y volumen de subconjuntos de espacios euclideos. En particular,esta teoría nos brinda una respuesta sistemática a la pregunta: ¿a qué subconjuntos de R se les puede asociar unalongitud?. Como se comprobó al desarrollar la teoría de conjuntos, es imposible asociar una longitud a cualquiersubconjunto de R de tal manera que se cumplan las propiedades de invariancia por traslación y de aditividad conrespecto a la unión conjuntos. Estos conjuntos se llaman no medibles.Naturalmente, la integral de Riemann usa implícitamente el concepto de longitud. Un elemento básico de este tipo deintegral son los rectángulos de base [a, b] y altura [c, d] cuya longitud es (b - a) y cuya área es (b-a)·(d-c).En el desarrollo de la teoría los libros más modernos (posteriores a 1950) se usa el método axiomático para definir lamedida, es decir, que una medida es una función μ definida sobre ciertos subconjuntos de un conjunto E quesatisface una lista de propiedades.
Integración de LebesgueConsideremos μ una medida no negativa sobre σ-álgebra X de subconjuntos de E. Por ejemplo, E puede ser unespacio euclídeo n dimensional Rn o algún subconjunto medible de él, X puede ser el σ-álgebra de todos lossubconjuntos medibles de E, y μ puede ser la medida de Lebesgue. En la teoría de la probabilidad μ puede ser unafunción de probabilidad sobre un espacio de probabilidad E.En la teoría de Lebesgue, el cálculo de integrales se restringe a un tipo de funciones llamadas funciones medibles.Una función es medible si la preimagen de cualquier intervalo cerrado pertenece a X, es decir, es un conjuntomedible:
El conjunto de funciones medibles es cerrado bajo operaciones algebraicas, aunque más importante es el hecho deque esta clase también es cerrada al tomar límites de sucesiones de funciones:
es medible si las funciones que forman los términos de la sucesión fk, k N, son también medibles.
Vamos a construir la integral de Lebesgue : para funciones reales medibles f construidas sobre E en varias
etapas calculando las integrales de funciones sencillas:Función característica o indicadora: Dado un subconjunto S medible contenido en E, la función característica 1Stoma valor 1 para los elementos pertenecientes a S y 0 para el resto.
La integral de esta función ha de ser la medida del conjunto S.

Integral de Lebesgue 43
Función simple: Una función simple es de la forma , donde ak son números reales y la suma es
finita.A partir del caso anterior más sencillo se puede asumir que el resultado de integrar una función simple sea:
A pesar de que una función simple se pueda expresar como distintas sumas, el resultado de la integral no varía.Función no negativa: Sea f una función no negativa medible sobre E. Se define
Funciones con signo: Una función con signo definida sobre E se puede escribir como suma de dos funciones nonegativas:
donde
Si ambas integrales verifican
entonces se puede definir la integral de Lebesgue de f (x) de la siguiente manera
Interpretación intuitivaFolland[1] resumió los dos distintos modos de aproximarse al concepto de integral de la siguiente forma: "paracalcular la integral de Riemann se particiona (divide) el dominio [a, b] en subintervalos", mientras que en la integralde Lebesgue "se particiona el rango de f".Imaginemos que queremos calcular el área de una curva (ver figura). Tenemos dos métodos distintos para encontraruna aproximación a esta área:
Integral de Riemann-Darboux (en azul) e integral de Lebesgue (enrojo).
• Método de Riemann-Darboux, en el cualdividimos la curva en columnas con la misma base yaltura la correspondiente a la curva en el centro de lacolumna. El área de cada columna es igual a sualtura por su base, y el área total de la curva vienedado aproximadamente por la suma de los áreas detodas las columnas. Este caso es equivalente aparticionar el intervalo horizontal [a, b].
• Método de Lebesgue, en el cual dividimos la curvaen capas horizontales de igual altura aunque dedistinto área, debido a las diferentes longitudes de labase (μ(Sk)). El área total de la curva seráaproximado por la suma de los áreas de todas las capas (ak μ(Sk)). Este caso es equivalente a particionar el rangode f (intervalo vertical de la función).

Integral de Lebesgue 44
Ejemplo: la función de Dirichlet
Consideremos la función característica de los racionales definida sobre el intervalo . Esta función no escontinua en ningún punto de su dominio, ¿será integrable?• no es integrable Riemann sobre : no importa cuán fina sea una partición del intervalo ,
cualquier subintervalo contendrá al menos un número racional y otro número irracional, ya que ambos conjuntosson densos en los reales. Por tanto, cualquier suma superior será 1, así como el ínfimo de todas las sumassuperiores (suma superior de Riemann-Darboux) y cualquier suma inferior será 0, igual que el supremo de todaslas sumas inferiores (suma inferior de Riemann-Darboux). Si el supremo y el ínfimo son distintos la integral deRiemann no existe.
• sí es integrable Lebesgue sobre : dado que es la función indicadora de los números racionales, pordefinición
ya que es numerable.
Propiedades básicas de la integral de Lebesgue• Si dos funciones f y g son iguales en todas partes de su dominio salvo en un conjunto de medida nula y si f es
integrable Lebesgue, entonces g es integrable Lebesgue y la integral de Lebesgue de ambas funciones seráidéntica.
Si entonces
• Linealidad: Si f y g son funciones integrables Lebesgue y a y b son números reales fijos, entonces
• Monotonía: Si f y g son funciones integrables Lesbesgue y f < g, entonces
Notas[1][1] Gerald B. Folland, Real Analysis: Modern Techniques and Their Applications, 1984, p. 56.
Referencias• Dudley, R. M., 1989. Real Analysis and Probability. Wadsworth & Brookes/Cole. Very thorough treatment,
particularly for probabilists with good notes and historical references.• Folland, G. B., 1999. Real Analysis: Modern Techniques and Their Applications. John Wiley & Sons.• Paul Halmos, Measure Theory, D. van Nostrand Company, Inc. 1950. A classic, though somewhat dated
presentation.• Loomis, L. H., 1953. An Introduction to Abstract Harmonic Analysis. Van Nostrand Company, Inc. Includes a
presentation of the Daniell integral.• Henri Lebesgue, 1972. Oeuvres Scientifiques. L'Enseignement Mathématique.• Munroe, M. E., 1953. Introduction to Measure and Integration, Addison Wesley. Good treatment of the theory of
outer measures.• Royden, H. L., 1988. Real Analysis, 3rd. ed. Prentice Hall.• Walter Rudin, 1976. Principles of Mathematical Analysis, 3rd. ed. McGraw-Hill. Known as Little Rudin, contains
the basics of the Lebesgue theory, but does not treat material such as Fubini's theorem.
Integral de Lebesgue 45
• ------, 1966. Real and Complex Analysis. McGraw-Hill. Known as Big Rudin. A complete and careful presentationof the theory. Good presentation of the Riesz extension theorems. However, there is a minor flaw (in the firstedition) in the proof of one of the extension theorems, the discovery of which constitutes exercise 21 of Chapter2.
• Shilov, G. E., and Gurevich, B. L., 1978. Integral, Measure, and Derivative: A Unified Approach, Richard A.Silverman, trans. Dover Publications. ISBN 0-486-63519-8. Emphasizes the Daniell integral.
• Guillermo Grabinsky S., 2009. Teoría de la medida. Servicios editoriales de la facultad de ciencias, UNAM.
Medida de LebesgueEn matemáticas, la medida de Lebesgue es la forma estándar de asignar una longitud, área, o volumen a lossubconjuntos del espacio euclídeo. Se usa en el análisis real, especialmente para definir la integración de Lebesgue.Los conjuntos a los que se les puede asignar un tamaño se denominan Lebesgue-medibles, o medibles a secas si nohay ambigüedad sobre la medida; el volumen o medida de un conjunto Lebesgue-medible A se denota por λ(A). Unvalor de ∞ para la medida de Lebesgue es perfectamente posible, pero aún en ese caso, si se asume el axioma deelección, no todos los conjuntos de Rn son Lebesgue-medibles. El comportamiento "extraño" de los conjuntos nomedibles da lugar a tales resultados como la paradoja de Banach-Tarski, una consecuencia del axioma de elección.
Ejemplos• Si A es un intervalo cerrado [a, b], su medida de Lebesgue es la longitud b−a. El intervalo abierto ]a, b[ tiene la
misma medida, pues la diferencia entre los dos conjuntos tiene medida cero.• Si A es el producto cartesiano de dos intervalos [a, b] y [c, d], es un rectángulo cuya medida de Lebesgue es el
área (b−a)·(d−c).• El conjunto de Cantor es un ejemplo de conjunto no numerable con medida de Lebesgue cero.
PropiedadesLa medida de Lebesgue en Rn tiene las siguientes propiedades:• Si A es un producto cartesiano de intervalos I1 × I2 × ... × In, es Lebesgue-medible y λ(A) = |I1|·|I2|·...·|In|, donde |I|
denota la longitud del intervalo I.• Si A es una unión disjunta de finitos o contables conjuntos Lebesgue-medibles, A mismo es Lebesgue-medible y
λ(A) es igual a la suma (o serie infinita) de las medidas de los conjuntos correspondientes.• Si A es Lebesgue-medible, también lo es su complemento.• λ(A) ≥ 0 para todo conjunto Lebesgue-medible A.• Si A y B son Lebesgue-medibles, y A ⊆ B, λ(A) ≤ λ(B) (consecuencia de los puntos anteriores).•• Las uniones e intersecciones contables de conjuntos Lebesgue-medibles son asimismo Lebesgue-medibles
(consecuencia de los puntos anteriores).• Si A es un subconjunto abierto o cerrado de Rn, es Lebesgue-medible.• La medida de Lebesgue es localmente finita e interna regular, y por lo tanto una medida de Radon.• Si A es un conjunto Lebesgue-medible con λ(A) = 0 (o conjunto nulo), todo subconjunto de A es también un
conjunto nulo.• Si A es Lebesgue-medible y x es un elemento de Rn, la traslación definida por A + x = a + x : a ∈ A es también
Lebesgue-medible y, más aún, tiene la misma medida que A.Lo anterior se puede resumir como sigue:
Los conjuntos Lebesgue-medibles forman una σ-álgebra que incluye todos los productos de intervalos, y λ es la única medida completa invariante por translación en esa σ-álgebra que cumple λ([0,1] × [0,1] × ... × [0,1]) =
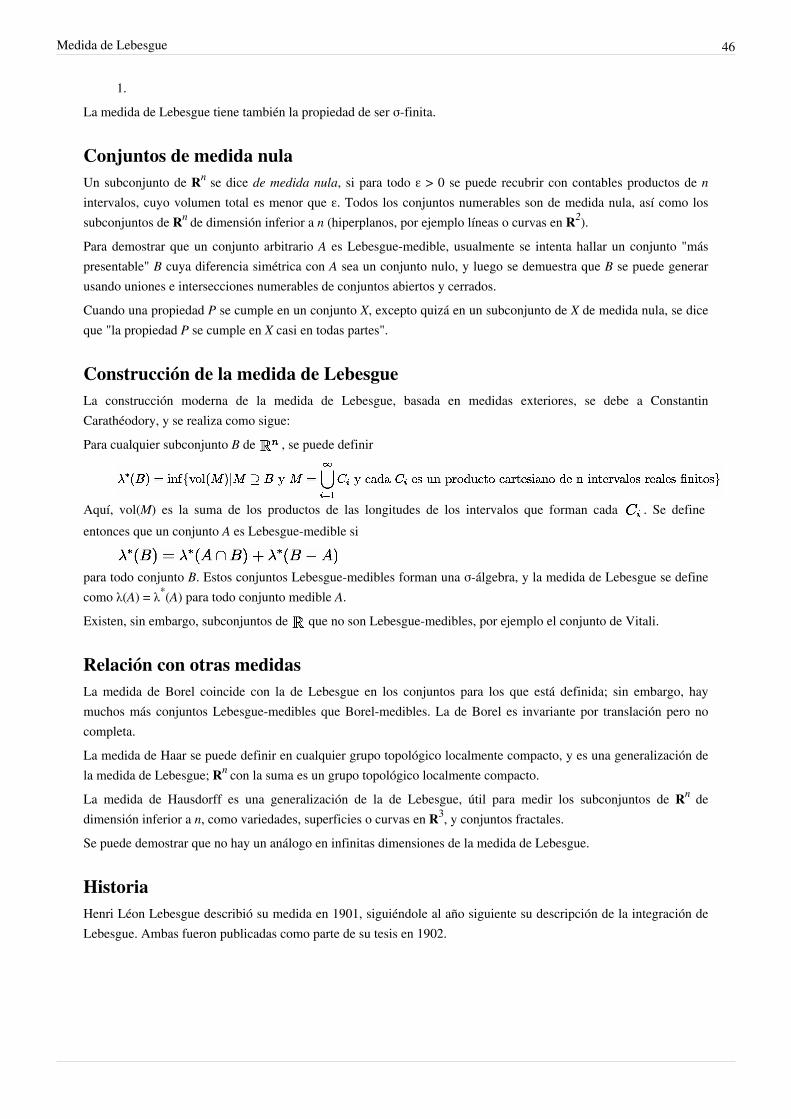
Medida de Lebesgue 46
1.La medida de Lebesgue tiene también la propiedad de ser σ-finita.
Conjuntos de medida nulaUn subconjunto de Rn se dice de medida nula, si para todo ε > 0 se puede recubrir con contables productos de nintervalos, cuyo volumen total es menor que ε. Todos los conjuntos numerables son de medida nula, así como lossubconjuntos de Rn de dimensión inferior a n (hiperplanos, por ejemplo líneas o curvas en R2).Para demostrar que un conjunto arbitrario A es Lebesgue-medible, usualmente se intenta hallar un conjunto "máspresentable" B cuya diferencia simétrica con A sea un conjunto nulo, y luego se demuestra que B se puede generarusando uniones e intersecciones numerables de conjuntos abiertos y cerrados.Cuando una propiedad P se cumple en un conjunto X, excepto quizá en un subconjunto de X de medida nula, se diceque "la propiedad P se cumple en X casi en todas partes".
Construcción de la medida de LebesgueLa construcción moderna de la medida de Lebesgue, basada en medidas exteriores, se debe a ConstantinCarathéodory, y se realiza como sigue:Para cualquier subconjunto B de , se puede definir
Aquí, vol(M) es la suma de los productos de las longitudes de los intervalos que forman cada . Se defineentonces que un conjunto A es Lebesgue-medible si
para todo conjunto B. Estos conjuntos Lebesgue-medibles forman una σ-álgebra, y la medida de Lebesgue se definecomo λ(A) = λ*(A) para todo conjunto medible A.Existen, sin embargo, subconjuntos de que no son Lebesgue-medibles, por ejemplo el conjunto de Vitali.
Relación con otras medidasLa medida de Borel coincide con la de Lebesgue en los conjuntos para los que está definida; sin embargo, haymuchos más conjuntos Lebesgue-medibles que Borel-medibles. La de Borel es invariante por translación pero nocompleta.La medida de Haar se puede definir en cualquier grupo topológico localmente compacto, y es una generalización dela medida de Lebesgue; Rn con la suma es un grupo topológico localmente compacto.La medida de Hausdorff es una generalización de la de Lebesgue, útil para medir los subconjuntos de Rn dedimensión inferior a n, como variedades, superficies o curvas en R3, y conjuntos fractales.Se puede demostrar que no hay un análogo en infinitas dimensiones de la medida de Lebesgue.
HistoriaHenri Léon Lebesgue describió su medida en 1901, siguiéndole al año siguiente su descripción de la integración deLebesgue. Ambas fueron publicadas como parte de su tesis en 1902.

Medida de probabilidad 47
Medida de probabilidadUna medida de probabilidad es una medida P que asigna a cada conjunto en el σ-álgebra de un espacio muestral,un número en el intervalo [0, 1] y tiene las siguientes propiedades: Sea E un espacio muestral y β un σ-álgebra desubconjuntos de E. Decimos que P es una medida de probabilidad en el espacio muestral E si satisface los siguientesaxiomas:• Axioma 1. A cada suceso A que pertenece a β le corresponde un número real P(A), tal que:
(1) • Axioma 2.
(2) • Axioma 3. Si A1, A2 ... son sucesos mutuamente excluyentes (incompatibles dos a dos, disjuntos o de intersección
vacía dos a dos),entonces:
(3)
Medida espectralEn matemáticas, en especial en análisis funcional una medida espectral es una aplicación cuyo dominio es unaσ-álgebra y cuyos valores son proyecciones autoadjuntas en un espacio de Hilbert. Medidas espectrales se utilizan enla teoría espectral de operadores autoadjuntos.
Definición formalSean
• un espacio medible, es decir es una σ-álgebra de subconjuntos de .• un espacio de Hilbert.• una aplicación de al conjunto de proyecciones ortogonales de .
es una medida espectral si y solamente si
•• Si es una sucesión de elementos de disjuntos entre si, entonces las proyecciones
son ortogonales entre si y
donde la convergencia en el sumatorio es en el sentido de la convergencia fuerte de operadores: O sea que para todovector

Medida espectral 48
Referencias• G. W. Mackey, The Theory of Unitary Group Representations, The University of Chicago Press, 1976• V. S. Varadarajan, Geometry of Quantum Theory V2, Springer Verlag, 1970.
Medida exteriorUna medida exterior sobre un cierto conjunto X es una aplicación que asocia a cada subconjunto E de X unvalor comprendido entre 0 e infinito y que satisface tres propiedades:1. El dominio de consiste de todos los subconjuntos de .2.3.
4.
5.Si hacemos para en la propiedad 4, podemos notar que una medida exterior es finitamentesubadditiva.El interés de las medidas exteriores estriba en que son fáciles de construir y en que se puede aplicar el teorema deCarathéodory para construir, a partir de ellas, una medida en X.
Referencias• Folland, Gerald B. (1984): Real analysis. Jhon Wiley & Sons. ISBN 0-471-80958-6 p. 28
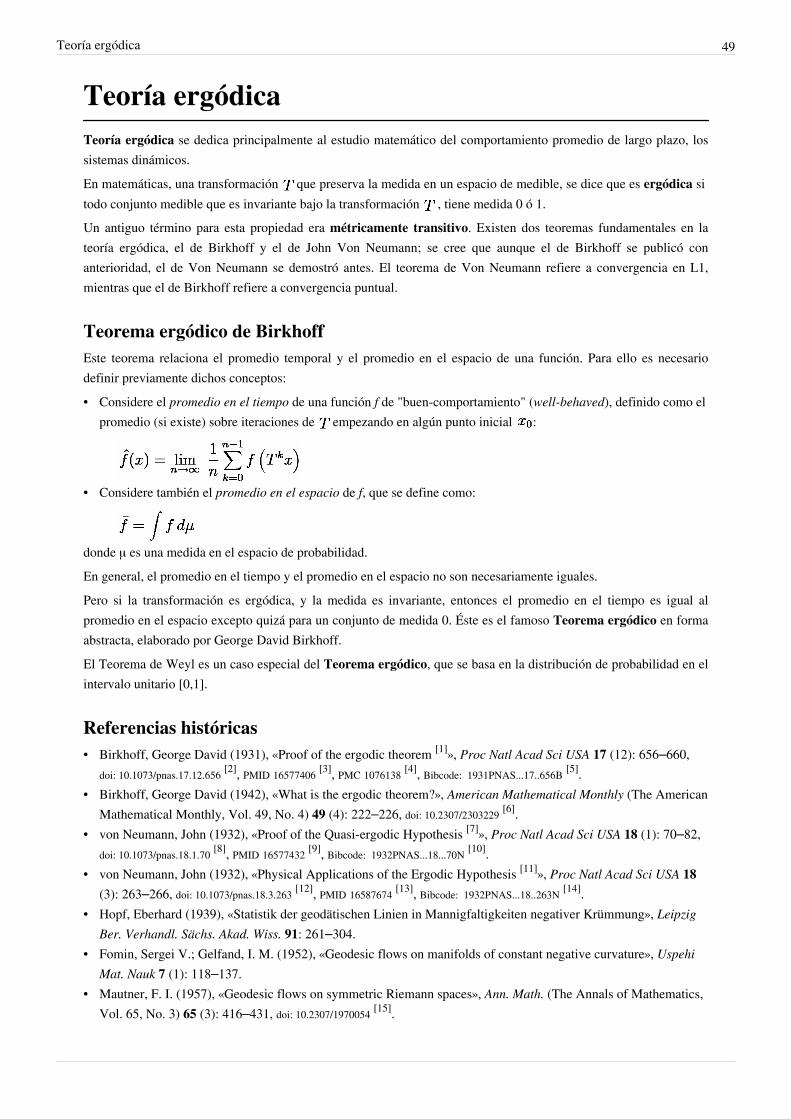
Teoría ergódica 49
Teoría ergódicaTeoría ergódica se dedica principalmente al estudio matemático del comportamiento promedio de largo plazo, lossistemas dinámicos.En matemáticas, una transformación que preserva la medida en un espacio de medible, se dice que es ergódica sitodo conjunto medible que es invariante bajo la transformación , tiene medida 0 ó 1.Un antiguo término para esta propiedad era métricamente transitivo. Existen dos teoremas fundamentales en lateoría ergódica, el de Birkhoff y el de John Von Neumann; se cree que aunque el de Birkhoff se publicó conanterioridad, el de Von Neumann se demostró antes. El teorema de Von Neumann refiere a convergencia en L1,mientras que el de Birkhoff refiere a convergencia puntual.
Teorema ergódico de BirkhoffEste teorema relaciona el promedio temporal y el promedio en el espacio de una función. Para ello es necesariodefinir previamente dichos conceptos:• Considere el promedio en el tiempo de una función f de "buen-comportamiento" (well-behaved), definido como el
promedio (si existe) sobre iteraciones de empezando en algún punto inicial :
• Considere también el promedio en el espacio de f, que se define como:
donde μ es una medida en el espacio de probabilidad.En general, el promedio en el tiempo y el promedio en el espacio no son necesariamente iguales.Pero si la transformación es ergódica, y la medida es invariante, entonces el promedio en el tiempo es igual alpromedio en el espacio excepto quizá para un conjunto de medida 0. Éste es el famoso Teorema ergódico en formaabstracta, elaborado por George David Birkhoff.El Teorema de Weyl es un caso especial del Teorema ergódico, que se basa en la distribución de probabilidad en elintervalo unitario [0,1].
Referencias históricas• Birkhoff, George David (1931), «Proof of the ergodic theorem [1]», Proc Natl Acad Sci USA 17 (12): 656–660,
doi: 10.1073/pnas.17.12.656 [2], PMID 16577406 [3], PMC 1076138 [4], Bibcode: 1931PNAS...17..656B [5].• Birkhoff, George David (1942), «What is the ergodic theorem?», American Mathematical Monthly (The American
Mathematical Monthly, Vol. 49, No. 4) 49 (4): 222–226, doi: 10.2307/2303229 [6].• von Neumann, John (1932), «Proof of the Quasi-ergodic Hypothesis [7]», Proc Natl Acad Sci USA 18 (1): 70–82,
doi: 10.1073/pnas.18.1.70 [8], PMID 16577432 [9], Bibcode: 1932PNAS...18...70N [10].• von Neumann, John (1932), «Physical Applications of the Ergodic Hypothesis [11]», Proc Natl Acad Sci USA 18
(3): 263–266, doi: 10.1073/pnas.18.3.263 [12], PMID 16587674 [13], Bibcode: 1932PNAS...18..263N [14].• Hopf, Eberhard (1939), «Statistik der geodätischen Linien in Mannigfaltigkeiten negativer Krümmung», Leipzig
Ber. Verhandl. Sächs. Akad. Wiss. 91: 261–304.• Fomin, Sergei V.; Gelfand, I. M. (1952), «Geodesic flows on manifolds of constant negative curvature», Uspehi
Mat. Nauk 7 (1): 118–137.• Mautner, F. I. (1957), «Geodesic flows on symmetric Riemann spaces», Ann. Math. (The Annals of Mathematics,
Vol. 65, No. 3) 65 (3): 416–431, doi: 10.2307/1970054 [15].
Teoría ergódica 50
• Moore, C. C. (1966), «Ergodicity of flows on homogeneous spaces», Amer. J. Math. (American Journal ofMathematics, Vol. 88, No. 1) 88 (1): 154–178, doi: 10.2307/2373052 [16].
Referencias actuales• D.V. Anosov (2001), «Ergodic theory [17]», en Hazewinkel, Michiel (en inglés), Encyclopaedia of Mathematics,
Springer, ISBN 978-1556080104
•• Plantilla:PlanetMath attribution• Vladimir Igorevich Arnol'd and André Avez, Ergodic Problems of Classical Mechanics. New York: W.A.
Benjamin. 1968.• Leo Breiman, Probability. Original edition published by Addison–Wesley, 1968; reprinted by Society for
Industrial and Applied Mathematics, 1992. ISBN 0-89871-296-3. (See Chapter 6.)• Peter Walters, An introduction to ergodic theory, Springer, New York, 1982, ISBN 0-387-95152-0.• Tim Bedford, Michael Keane and Caroline Series, eds. (1991), Ergodic theory, symbolic dynamics and hyperbolic
spaces, Oxford University Press, ISBN 0-19-853390-X (A survey of topics in ergodic theory; with exercises.)•• Karl Petersen. Ergodic Theory (Cambridge Studies in Advanced Mathematics). Cambridge: Cambridge
University Press. 1990.• Joseph M. Rosenblatt and Máté Weirdl, Pointwise ergodic theorems via harmonic analysis, (1993) appearing in
Ergodic Theory and its Connections with Harmonic Analysis, Proceedings of the 1993 Alexandria Conference,(1995) Karl E. Petersen and Ibrahim A. Salama, eds., Cambridge University Press, Cambridge, ISBN0-521-45999-0. (An extensive survey of the ergodic properties of generalizations of the equidistribution theoremof shift maps on the unit interval. Focuses on methods developed by Bourgain.)
• A.N. Shiryaev, Probability, 2nd ed., Springer 1996, Sec. V.3. ISBN 0-387-94549-0.• P. Halmos (1956): Lectures on Ergodic Theory, Chelsea,• I. P. Cornfeld, Sergei Vasilievich Fomin, Yakov Grigorievich Sinai (1982): Ergodic theory, Springer, ISBN
0-387-90580-4• Peter Walters (1982): An introduction to ergodic theory, Springer, ISBN 0-387-95152-0• Carlo Sempi (2005): Introduzione alla teoria Ergodica [18] (Quaderni del Dipartimento di Matematica
dell'Università di Lecce) (en italiano)
Referencias[1] http:/ / www. pnas. org/ cgi/ reprint/ 17/ 12/ 656[2] http:/ / dx. doi. org/ 10. 1073%2Fpnas. 17. 12. 656[3] http:/ / www. ncbi. nlm. nih. gov/ pubmed/ 16577406[4] http:/ / www. pubmedcentral. nih. gov/ articlerender. fcgi?tool=pmcentrez& artid=1076138[5] http:/ / adsabs. harvard. edu/ abs/ 1931PNAS. . . 17. . 656B[6] http:/ / dx. doi. org/ 10. 2307%2F2303229[7] http:/ / www. pubmedcentral. nih. gov/ articlerender. fcgi?tool=pmcentrez& artid=1076162[8] http:/ / dx. doi. org/ 10. 1073%2Fpnas. 18. 1. 70[9] http:/ / www. ncbi. nlm. nih. gov/ pubmed/ 16577432[10] http:/ / adsabs. harvard. edu/ abs/ 1932PNAS. . . 18. . . 70N[11] http:/ / www. pubmedcentral. nih. gov/ articlerender. fcgi?tool=pmcentrez& artid=1076204[12] http:/ / dx. doi. org/ 10. 1073%2Fpnas. 18. 3. 263[13] http:/ / www. ncbi. nlm. nih. gov/ pubmed/ 16587674[14] http:/ / adsabs. harvard. edu/ abs/ 1932PNAS. . . 18. . 263N[15] http:/ / dx. doi. org/ 10. 2307%2F1970054[16] http:/ / dx. doi. org/ 10. 2307%2F2373052[17] http:/ / www. encyclopediaofmath. org/ index. php?title=e/ e036150[18] http:/ / siba2. unile. it/ ese/ search/ issue. php?recs=10& id=588& pub_type=m& single_pub=1& pub_id=254& n_campo=contents

Teorema de Carathéodory 51
Teorema de CarathéodoryEn la rama del análisis matemático una parte relevante es la denominada Teoría de la medida, la cual estudia lamedida de conjuntos y les asigna un valor a éstos. En la vida cotidiana medimos o clasificamos los conjuntos segúnsu longitud, superficie o volumen, incluso utilizamos otras magnitudes como la densidad, peso, viscosidad, dureza ymuchas otras características que puedan ocurrírsenos. En matemáticas los conjuntos se pueden separar en aquéllosque pueden medirse y aquéllos que no, intuitivamente podemos pensar que esto es absurdo puesto que todo conjuntotiene una de estas medidas mencionadas recientemente, pero lo cierto es que existen numerosos más conjuntos nomedibles que medibles, que a priori no encontramos en la naturaleza, y éstos no medibles son incluso difícil dedefinir explícitamente en muchos casos.Puesto que una medida es una aplicación como veremos más adelante, pueden existir varias medidas, una destacablees la medida de Lebesgue en la que se asientan las bases de la integral de Lebesgue.Para comprender el Teorema de Carathéodory es aconsejable recordar el concepto o definición de medida.
Definición: Una medida en un conjunto X es una aplicación , donde M es una -álgebraen X. tal que:
(i)
(ii)
Dados sucesión de M i ,
Si es una medida en X, decimos que es un espacio de medida.
Definición: (Medida exterior) Una medida exterior en X es una aplicación que cumpletres propiedades:
(i)
(ii) Si
(iii) -subaditividad
Si sucesión de entonces
Propiedad: Toda medida en X, definida en , es una medida exterior en X. (El recíproco no es cierto).Es por ese motivo que las medidas exteriores son más fáciles de construir que las medidas. Para construir la medidade Lebesgue lo que se hace es, construir una medida exterior, denominada medida exterior de Lebesgue, ya que esmás fácil de construir y utilizando el Teorema de Carathéodory podemos definir la medida de Lebesgue con la que seasientan lan bases de la integral de Lebesgue.

Teorema de Carathéodory 52
Teorema de Carathéodory
Sea una medida exterior en X. Entonces el conjunto formado por todos los conjuntos -medibles es una -álgebra en X y ( restringida en ) es una medida en X. Además,
En particular, es una medida completa, es decir, si y entonces todo tambiéncumple y .Es relevante destacar que el teorema muestra también como construir la medida exterior a partir de una medidacualquiera definida en una semi-álgebra (como por ejemplo, los intervalos semiabiertos en ). Así, si la medida
definida en la semiálgebra es , la medida exterior estará dada por
, donde
En el caso particular de , la semiálgebra es , y la medida sobre ella está dada por.
Paradoja de Banach-Tarski
Paradoja de Banach-Tarski.
La paradoja de Banach-Tarski es en realidad unteorema que afirma que es posible dividir una esfera(llena) de radio 1 en ocho partes disjuntas dos a dos, demodo que, aplicando movimientos oportunos a cinco deellas, obtengamos nuevos conjuntos que constituyan unapartición de una esfera (llena) de radio 1, y lo mismoocurra con las tres partes restantes.
En palabras más sencillas, se supone que es posible fabricar un rompecabezas tridimensional de un total de ochopiezas, las cuales, combinadas de una determinada manera, formarían una esfera completa y rellena (sin agujeros) y,combinadas de otra manera, formarían dos esferas rellenas (sin agujeros) del mismo radio que la primera.El teorema de Banach–Tarski recibe el nombre de paradoja por contradecir nuestra intuición geométrica básica. Lasoperaciones básicas que se realizan preservan el volumen siempre que los fragmentos sean medibles, peroprecisamente las ocho partes citadas en el teorema son conjuntos no medibles. La construcción de estos conjuntoshace uso del axioma de elección para realizar una cantidad no numerable de elecciones arbitrarias.
Notas y referencias

Teorema de RadonNikodym 53
Teorema de Radon–NikodymEn matemáticas y particularmente en teoría de la medida, el teorema de Radon–Nikodym establece condicionesbajo las cuales se pueden generar medidas con signo absolutamente continuas respecto a una medida dada.El teorema está asociado a los nombres de Johann Radon, que lo probó en 1913 para el caso particular en que elespacio subyacente es R'N, y Otto M. Nikodym, que lo extendió al caso general en 1930.
FormulaciónDado un espacio medible , una medida -finita y una medida con signo -finita
absolutamente continua con respecto a , entonces existe una función medible sobre que satisface:
, para todo .
Además, si es otra función medible en tal que
, para todo
entonces excepto, tal vez, en un conjunto de -medida nula.
Derivada de Radon–NikodymDadas las condiciones antes mencionadas, a la función que satisface
para todo se la llama derivada de Radon-Nykodym de con respecto a y suele representarse mediante. Dicha notación refleja el hecho de que esta función desempeña un papel análogo al de la derivada en el
cálculo.
Notas
Referencias• Shilov, G. E., and Gurevich, B. L., 1978. Integral, Measure, and Derivative: A Unified Approach, Richard A.
Silverman, trans. Dover Publications. ISBN 0-486-63519-8.
Teorema del sándwich de jamón 54
Teorema del sándwich de jamónPara el teorema sobre el límite de una función comprendida entre otras, ver Teorema del sándwich
En la teoría de la medida, una rama de las matemáticas, el Teorema del sandwich de jamón (Ham sandwichtheorem), también llamado Teorema de Stone-Tukey en honor a Marshall Stone y John W. Tukey, establece quedados n "objetos" en un espacio n-dimensional, es posible dividir cada uno en dos (en función de su volumen) con unúnico hiperplano (n−1)-dimensional. Aquí los "objetos" son conjuntos de medidas finitas (o simplemente medidasexternas) para que el concepto de "dividir el volumen en dos" tenga sentido.
NombreEl Teorema del sandwich de jamón toma su nombre de cuando n = 3 y los tres objetos son un trozo de jamón y dosde pan — un sandwich — que puede ser biseccionado con un único corte (p.ej., un plano). En dos dimensiones, elteorema es conocido como el teorema de la tortita (pancake theorem), cortando dos infinitesimalmente delgadastortitas en un plato con un único corte (una recta).El Teorema del sandwich de jamón también es conocido como el "Teorema del sandwich de jamón y queso",refiriéndose de nuevo al caso especial cuando n = 3 y los tres objetos son1. una loncha de jamón2. una loncha de queso, y3. dos rebanadas de pan (tratado como un único objeto desconectado).El teorema afirma que es posible cortar el jamón y el queso en dos mitades de manera que cada mitad tengaexactamente la misma cantidad de pan, queso y jamón. Es posible tratar las dos rebanadas de pan como un únicoobjeto debido a que el teorema solo requiere que la porción de cada lado del plano varíe continuamente conforme elplano se mueva a través del espacio tridimensional.El Teorema del sandwich de jamón no tiene ninguna relación con el "teorema del estrujamiento" (squeeze theorem)(también llamado "teorema del sandwich").
HistoriaSegún Beyer y Zardecki (2004), la primera aparición del Teorema del sandwich de jamón, concretamente el casodonde d = 3 donde se corta tres sólidos con un plano, fue escrita por Steinhaus y otros autores (1938). El documentode Beyer y Zardecki incluye una traducción del documento de 1938. En él asignan el planteamiento de este problemaa Hugo Steinhaus, y a Stefan Banach como la primera persona que logró resolverlo a través de una reducción delTeorema de Borsuk-Ulam. El documento plantea la cuestión de dos formas: primero, formalmente, como "¿Essiempre posible biseccionar tres sólidos, colocados arbitrariamente, con la ayuda de un plano adecuado?" y segundo,informalmente, como "¿Podemos colocar un trozo de jamón bajo un cuchillo de forma que se corte carne, hueso ygrasa en dos mitades?". Más tarde, el documento ofrecía una prueba del teorema.Más recientemente, en 1942, Stone y Tukey se refirieron a este problema, por lo que también se le conoce como el"Teorema de Stone-Tukey". Este artículo prueba una versión n-dimensional del teorema en casos más generales. Enél se le reconoce el caso de n = 3 a Stanisław Ulam; pero Beyres & Zardecki (2004) alegó que era incorrecta, dado eldocumento de Steinhaus, aunque "Ulam hizo una contribución fundamental proponiendo el Teorema deBorsuk-Ulam".Byrnes, Cairns y Jessup (2001) han demostrado que no siempre es posible posicionar el hiperplano correctamente tansolo cortando a través del centro de gravedad.
Teorema del sándwich de jamón 55
Referencias• Beyer, W. A. & Zardecki, Andrew (Jan. 2004). "The early history of the ham sandwich theorem]". American
Mathematical Monthly 111 (1), 58–61.• Lo, Chi-Yuan & Steiger, W. L. (1990). "An optimal time algorithm for ham-sandwich cuts in the plane". En la
Segunda Coferencia de Geometría Computacional Canadiense, pp. 5–9.• Lo, Chi-Yuan; Matoušek, Jirí; & Steiger, William L. (1994). Discrete & Computational Geometry 11, 433–452.• Steinhaus, Hugo & others (1938). "A note on the ham sandwich theorem". Mathesis Polska 9, 26–28.• Stone, A. H. & Tukey, J. W. (1942). "Generalized "sandwich" theorems". Duke Mathematical Journal 9,
356–359.• Byrnes G.B., Cairns G. & Jessup, B. (2001). Left-overs from the Ham-Sandwich Theorem Amer. Math. Monthly
108 246–9
Teorema de aproximación de WeierstrassEn análisis matemático, el teorema de aproximación de Weierstrass es un resultado que afirma que las funcionesreales continuas definidas en un intervalo cerrado y acotado pueden ser aproximadas tanto como se quiera por unpolinomio. Es decir, los polinomios de coeficientes reales son densos en el conjunto de las funciones continuas sobreun intervalo cerrado.Karl Weierstrass dio una demostración de este resultado en 1885. Posteriormente, Marshall H. Stone generalizó elteorema (Stone, 1937) y simplificó la demostración. A esta generalización se la conoce como el teorema deStone–Weierstrass.
Teorema de aproximación de WeierstrassPara cualquier ε>0 y para cualquier función f continua sobre un intervalo , existe un polinomio decoeficientes reales, p, tal que
DemostraciónUna demostración constructiva puede hallarse utilizándose los polinomios de Bernstein. En efecto, si f(x) es unafunción continua en el intervalo [0, 1] se define el polinomio de Bernstein como
Se puede demostrar que
converge uniformemente en el intervalo [0, 1]. Una vez demostrado en el intervalo [0,1] es fácil demostrar elresultado para cualquier intervalo.
Teorema de Arzelá-Ascoli 56
Teorema de Arzelá-AscoliEl teorema de Arzelà-Ascoli es una de las herramientas más poderosas que hay para verificar si una familia defunciones de un espacio topólogico en otro es compacto. Lo que dice el teorema es lo siguiente:
Sea un espacio topológico compacto, un espacio métrico completo. Un conjunto (elespacio de las funciones continuas de en ) será relativamente compacto en la topología de la métrica infinitosi y solamente si:1. es equicontinuo2. Para todo , el conjunto es relativamente compacto en .Notar que si , la condición 2 es equivalente a pedir que para cada , el conjunto sea acotado.En este mismo caso, se cumple que si además es un espacio topólogico conexo, basta verificar que existe un tal que la condición 2 se cumple, y automáticamente se tendrá para todos.
Teorema de Bolzano-WeierstrassEn el análisis real, el teorema de Bolzano–Weierstrass es un importante teorema que caracteriza los conjuntossecuencialmente compactos.
EnunciadoEn el análisis real, el teorema de Bolzano-Weierstrass es un resultado fundamental referente a la convergencia en unespacio euclídeo dimensionalmente finito Rn. El teorema establece que cada sucesión acotada en Rn tiene unasubsucesión convergente. Una formulación equivalente es que un subconjunto de Rn es secuencialmente compacto siy solo si es cerrado y acotado.
DemostraciónEn primer lugar, aplicando el método de inducción matemática, demostraremos el teorema cuando n = 1, en cuyocaso el orden de R se puede poner a buen uso. De hecho tenemos el siguiente resultado.Lema: Cada sucesión xn en R tiene una subsucesión monótona.Demostración: Vamos a llamar a un número entero positivo n un "pico de la secuencia", si m> n implica x n > x m esdecir, si xn es mayor que todos los términos siguientes de la secuencia. Supongamos primero que la secuencia tienepicos infinitos, n1 < n2 < n3 < … < nj < … Entonces la subsecuencia correspondiente a los picos esmonótonamente decreciente, y ya está. Así que supongamos ahora que sólo hay un número finito de muchos picos,sea N el último pico y n1 = N + 1. Luego n1 no es un pico, ya que n1 > N, lo que implica la existencia de un n2 > n1con Una vez más, n2 > N no es un pico, por lo tanto hay n3 > n2 con Repetiendo esteproceso conduce a una subsucesión infinita no decreciente , si lo desea.Ahora supongamos que tenemos una secuencia acotada en R, por el Lema existe una subsucesión monótona,necesariamente limitada. Pero se sigue del teorema de convergencia monótona que esta subsecuencia debenconverger, y la prueba es completa. Por último, el caso general puede ser fácilmente reducida al caso de n = 1 comosigue: dada una secuencia limitada en Rn, la secuencia de las primeras coordenadas es una secuencia real limitado,por lo tanto tiene una subsucesión convergente. A continuación, puede extraer un subsubsucesión en el queconvergen las segundas coordenadas, y así sucesivamente, hasta que al final hemos pasado de la secuencia original asubsecuencia n veces - que sigue siendo una subsecuencia de la secuencia original - en la que cada coordenadaconverge secuencia , por lo tanto, la propia subsucesión es convergente.

Teorema de Bolzano-Weierstrass 57
Compacidad secuencial en espacios euclídeosSupongamos que A es un subconjunto de Rn con la propiedad de que toda sucesión en A tiene una subsucesiónconvergente a un elemento de A. Entonces, A debe ser limitada, pues de lo contrario existe una secuencia en la xm inA con || xm || ≥ m para todos los m, y luego cada subsecuencia es ilimitada y por tanto no convergentes. Por otra parteA debe ser cerrado, ya que desde un punto de noninterior x en el complemento de A se puede construir una secuenciaA con valores de convergencia a x. Así, los subconjuntos A, de Rn, para que cada secuencia en la A tiene unasubsucesión convergente a un elemento de A – es decir, los subconjuntos que están secuencialmente compacto en latopología de subespacio – son precisamente los conjuntos cerrados y limitados. Esta forma del teorema haceespecialmente clara la analogía con el Teorema de Heine-Borel, que afirma que un subconjunto de Rn es compacto siy solo si es cerrado y acotado. De hecho, la topología general nos dice que un espacio es compacto metrizable si ysolo si es secuencialmente compacto, de modo que la de Bolzano-Weierstrass y el teorema de Heine-Borel sonesencialmente los mismos.
HistoriaEl teorema de Bolzano-Weierstrass lleva el nombre de matemáticos Bernard Bolzano y Karl Weierstrass. Enrealidad, fue demostrado por primera vez por Bolzano en 1817 como un lema en la demostración del teorema devalor intermedio. Unos cincuenta años más tarde, el resultado fue identificado como significativo por derechopropio, y demostrado una vez más por Weierstrass. Desde entonces se ha convertido en un teorema fundamental delanálisis.
Bibliografía•• Fitzpatrick, Patrick M. (2006) Advanced Calculus (2nd ed.). Belmont, CA: Thompson Brooks/Cole. ISBN
0-534-37603-7.
Enlaces externos• Hazewinkel, Michiel, ed. (2001), «Bolzano-Weierstrass theorem [1]» (en inglés), Encyclopaedia of Mathematics,
Springer, ISBN 978-1556080104
• Weisstein, Eric W. «Bolzano-Weierstrass Theorem [2]» (en inglés). MathWorld. Wolfram Research.
Referencias[1] http:/ / www. encyclopediaofmath. org/ index. php?title=p/ b016880[2] http:/ / mathworld. wolfram. com/ Bolzano-WeierstrassTheorem. html

Teorema de Cartan 58
Teorema de CartanEn matemáticas hay dos resultados básicos en la Teoría de Grupo de Lie que van con el nombre de 'Teorema deCartan'. Ambos deben su nombre a Élie Cartan.1. El teorema que establece que por un grupo de Lie 'G', cualquier subgrupo cerrado es un subgrupo Lie.2. Un teorema de vectores de mayor peso en la teoría de la representación de un grupo Lie semisimple.Vea también los teoremas de Cartan A y B, resultados de Henri Cartan.
Teorema de convoluciónEn matemática, el teorema de convolución establece que bajo determinadas circunstancias, la Transformada deFourier de una convolución es el producto punto a punto de las transformadas. En otras palabras, la convolución enun dominio (por ejemplo el dominio temporal) es equivalente al producto punto a punto en el otro dominio (es decirdominio espectral).
Sean y dos funciones cuya convolución se expresa con . (notar que el asterisco denota convolución eneste contexto, y no multiplicación; a veces es utilizado también el símbolo ). Sea el operador de latransformada de Fourier, con lo que y son las transformadas de Fourier de f y g, respectivamente.Entonces
donde · indica producto punto. También puede afirmarse que:
Aplicando la transformada inversa de Fourier , podemos escribir:
DemostraciónLa demostración funciona para normalizaciones unitarias y no unitarias de la transformada de Fourier, pero en laversión unitaria tiene factores extras de que son inconvenientes aquí. Sean
Sean la transformada de Fourier de y la transformada de Fourier de :
.
Sea la convolución de y
Nótese que
Del teorema de Fubini tenemos que , así que su transformada de Fourier está definida. Sea latransformada de Fourier de :

Teorema de convolución 59
Obsérvese que y gracias al argumento de arriba podemos aplicarnuevamente el teorema de Fubini:
Sustituyendo ; tenemos , y por lo tanto:
Estas dos integrales son las definiciones de y , así que:
Que es lo que queríamos demostrar.
Lema de CotlarEn el campo del análisis funcional, el lema de ortogonalidad de Cotlar puede ser usado para obtener informaciónde la norma de un operador que actúa desde un Espacio de Hilbert en otro, cuando el operador puede serdescompuesto en piezas ortogonales.
Lema de Cotlar–SteinSean dos espacios de Hilbert y sea
un operador lineal. Se asume que
donde cada
es un operador lineal continuo.Significa
, Si
y
entonces
Criterio de Leibniz 60
Criterio de LeibnizEn análisis matemático el criterio de Leibniz es un método, debido a Gottfried Leibniz, utilizado para demostrar laconvergencia de series alternadas.Una serie alternada es aquella de la forma:
con an ≥ 0.
Entonces, la serie convergerá si la sucesión an es monótona decreciente y convergente a cero (han de cumplirseambas condiciones). Además, si
y
la suma parcial Sk aproxima la suma de la serie con error
La inversa en general no es cierto.
Referencias•• Knopp, Konrad, "Infinite Sequences and Series", Dover publications, Inc., Nueva York, 1956. (3.4) ISBN
0-486-60153-6• Whittaker, E. T., and Watson, G. N., A Course in Modern Analysis, la cuarta edición, Cambridge University
Press, 1963. (2.3) ISBN 0-521-58807-3
Teorema de descomposición espectral 61
Teorema de descomposición espectralEn matemáticas, y más especialmente en álgebra lineal y análisis funcional, el teorema de descomposiciónespectral, o más brevemente teorema espectral, expresa las condiciones bajo las cuales un operador o una matrizpueden ser diagonalizados (es decir, representadas como una matriz diagonal en alguna base). Se identifica así, untipo de operadores lineales que pueden representarse como una multiplicación de operadores.Ejemplos de los operadores a los que se aplica este teorema son los operadores autoadjuntos, o más en general, losoperadores normales en espacios de Hilbert.El Teorema Espectral, proporciona además, una descomposición canónica (llamada descomposición espectral) delespacio vectorial sobre el cual actúa el operador.
Espacio de dimensión finitaSea A:• Un Operador hermítico,• Una Matriz cuadrada y• Perteneciente a un espacio real o complejo V, de dimensión no infinitaCon el producto interno estándar, usando notación de Dirac, la simetría del operador implica:
para toda pareja de elementos . Recordemos que un vector propio de un operador A es un vector xdistinto de cero tal que Ax = rx. El valor r es el valor propio del vector, y debe ser un escalar.Teorema: Existe una base ortonormal de V que consiste en los vectores propios de A. Los valores propioscorrespondientes a cada vector son reales.Demostración: Asumimos que el cuerpo de escalares para el operador A son los complejos. Vamos a demostrar quelos valores propios son reales. Siendo uno de los los valores propios:
es igual a su conjugado y por tanto debe ser real. Probemos ahora la existencia de la base de vectores propios porinducción sobre la dimensión de V. Para ello, es suficiente demostrar que A tiene al menos un vector propio edistinto de cero. Podemos considerar ahora el espacio K de vectores ortogonales a e. Este es un espacio de dimensiónfinita. Si llamamos w a los vectores de K, veamos cómo actúa el operador A sobre los w:
A mapea los vectores w sobre K, es decir, al actuar A sobre un vector de K da otro vector de K. Lo que es más, Aconsiderado un operador lineal en K, es también simétrico en K y con esto se completa la demostración.Queda, sin embargo, por demostrar que A tenga al menos un vector propio. Teniendo en cuenta que, por el Teoremafundamental del álgebra los números complejos son un cuerpo algebraicamente cerrado, la función polinómica p(x)= det(A-xI) tiene por lo menos una raíz r. Esto implica que el operador A-rI no es una matriz invertible y por tanto,mapea un vector e distinto de cero a 0. Este vector e, es un vector propio de A. Esto finaliza la demostración.El teorema espectral es también válido para operadores simétricos en espacios de dimensión finita con productointerior real.La descomposición espectral de un operador A que tiene una base ortonormal de vectores propios, se obtieneagrupando todos los vectores que corresponden al mismo valor propio. Esto es
Estos espacios están definidos invariablemente, no se requiere ninguna elección de valores propios concretos.
Teorema de descomposición espectral 62
Como una consecuencia inmediata del teorema espectral para operadores simétricos obtenemos el teorema dedescomposición: V es la suma directa ortogonal de los espacios Vλ
y si λ1,..., λm son los autovalores de A,
Si A es un operador normal en un espacio de dimensión finita con producto interior, A también tiene unadescomposición espectral y el teorema de descomposición se mantiene para A. Los autovalores serán númeroscomplejos en general. Estos resultados se convierten directamente en resultados sobre las matrices: Para una matriznormal A, existe una matriz unitaria U tal que
donde Σ es la matriz diagonal formada por los valores propios de A. Cualquier matriz que se pueda diagonalizar deesta forma debe ser normal.Los vectores columna de U son los vectores propios de A y son ortogonales. Si A es una matriz real simétrica, sesigue por la versión real del teorema espectral para operadores simétricos que existe una matriz ortogonal tal que,UAU* es diagonal y todos los valores propios de A son reales.
Dualidad de PontryaginEn matemáticas, en particular en el análisis armónico y la teoría de grupos topológicos, la dualidad de Pontryaginexplica las propiedades generales de la transformada de Fourier. Pone en un contexto unificado un número deobservaciones sobre funciones en la recta real o en grupos abelianos finitos, vg.• Las funciones periódicas convenientemente regulares en la recta real tienen serie de Fourier y estas funciones se
pueden recuperar de su serie de Fourier;• Las funciones complejo-valoradas convenientemente regulares en la recta real tienen transformación de Fourier
que son también funciones en la recta real y, lo mismo que las funciones periódicas, estas funciones se puedenrecuperar de su transformación de Fourier; y
• las funciones complejo-valoradas en un grupo abeliano finito tienen transformación de Fourier discreta que sonfunciones en el grupo dual, que es grupo isomorfo (no canónicamente). Más aún cualquier función en un grupofinito se puede recuperar de su transformación de Fourier discreta.
La teoría, introducida por Lev Pontryagin y combinada con la medida de Haar introducida por John von Neumann,André Weil y otros depende de la teoría del grupo dual de un grupo abeliano localmente compacto.
La medida de HaarUn grupo topológico es localmente compacto si y solamente si la identidad e del grupo tiene una vecindad compacta.Esto significa que hay un cierto conjunto abierto V que contiene a e que es relativamente compacto en la topologíade G. Uno de los hechos más notables sobre un grupo localmente compacto G es que lleva una medida naturalesencialmente única, la medida de Haar, que permite medir consistentemente el "tamaño" de subconjuntossuficientemente regulares de G. En este sentido, la medida de Haar es una función de "área" o de "volumen"generalizada definida en subconjuntos de G. Más precisamente, una medida derecha de Haar en un grupolocalmente compacto G es una medida contablemente aditiva:
un conjunto de Boreldefinido en los conjuntos de Borel de G que es invariante derecho en el sentido que
Dualidad de Pontryagin 63
es finita para subconjuntos compactos A y distinta a cero y positiva para los conjuntos abiertos. A excepción defactores de escala positivos, las medidas de Haar son únicas. Observe que es imposible definir una medida invariantederecha contablemente aditiva en todos los subconjuntos ' ' de G si se asume el axioma de elección. Ver conjunto nomedible. Observe que uno puede definir semejantemente la medida izquierda de Haar. Las medidas derechas eizquierdas de Haar están relacionadas por la función modular.La medida de Haar permite definir la noción de Integral para funciones Borelianas tomando valores complejosdefinidas en el grupo. En particular, uno puede considerar varios Lp espacios asociados a la medida de Haar.Específicamente,
Ejemplos de grupos abelianos localmente son:• Rn, para n un número entero positivo, con la adición de vectores como operación del grupo.• Los números reales positivos con la multiplicación como operación. Este grupo se ve claramente es isomorfo a R.
De hecho, la función exponencial implementa ese isomorfismo.• Cualquier grupo abeliano finito. Por el teorema de estructura para los grupos abelianos finitos, todos estos grupos
son productos de grupos cíclicos.• Los números enteros Z bajo la adición.• El grupo de la circunferencia unitaria, denotado T (es decir, T¹ toro unidimensional). Este es el grupo de los
números complejos de módulo 1. T es isomorfo como grupo topológico grupo cociente a R/Z.
El grupo dualSi G es un grupo localmente compacto abeliano, definimos un carácter de G como un homomorfismo continuo degrupo φ : G → T. El conjunto de todos los caracteres en G es otro grupo abeliano localmente compacto, llamado elgrupo dual de G y denotado como G^. Con más detalle, se define al grupo dual como sigue: Si G es un grupolocalmente compacto abeliano, dos tales caracteres se pueden multiplicar punto a punto para formar un nuevocarácter, y el carácter trivial x → 1 es la identidad de G^. La topología de G^ es la de la convergencia uniforme sobrecompactos. Se puede demostrar que el grupo G^ con la topología así definida es un grupo abeliano localmentecompacto. Nota: Aquí T es el grupo de la circunferencia unitaria, que se puede ver como los números complejos demódulo 1 o el grupo cociente R/Z como se crea conveniente. Esta dualidad, como todas, es una función involutiva,puesto que el grupo dual de un grupo dual es el grupo original. El grupo dual está presentado como el espaciosubyacente para una versión abstracta de la transformada de Fourier. En este contexto, las funciones sobre el grupo G(e.g. funciones en L¹(G) o L²(G)) se transforman en las funciones con dominio en el grupo dual G^. Esto seimplementa vía la integral
donde la integral utiliza la medida de Haar.
Dualidad de Pontryagin 64
Transformada de Fourier en generalLa generalización de la transformada de Fourier más natural viene dada, entonces, por el operador
definido por(Ff)(φ) = ∫ f(x)φ(x) dx
para cada f en L²(G) y φ en G^. F es un isomorfismo isométrico entre espacios de Hilbert. El f*g de la convoluciónde dos elementos f, g en L²(G) se puede definir
(esto es una función en L²(G) y el teorema de la convolución F(f*g) = Ff·Fg que relaciona la transformada de Fourierde la convolución con el producto de los dos transformadas de Fourier permanece válido. En el caso de G = Rn,tenemos G^ = Rn y recuperamos la transformación continua de Fourier ordinaria, en el caso G = S¹, el grupo dual G^es naturalmente isomorfo al grupo de los números enteros Z y el operador antedicho F se reduce al cómputo decoeficientes de las series de Fourier de funciones periódicas; si G es el grupo cíclico finito Zn (véase aritméticamodular), que coincide con su propio grupo dual, recuperamos la transformación de Fourier discreta.
EjemplosPor ejemplo, un carácter en el grupo cíclico infinito de los números enteros Z es determinado por su valor φ(1),puesto que φ(n) = (φ(1))n da sus valores en el resto de los elementos de Z. Más aún, esta fórmula define un carácterpara cualquier elección de φ(1) en S¹ y la topología de la convergencia uniforme sobre compactos (que aparece aquícomo convergencia punto a punto) es la topología natural de S¹. Por lo tanto, el grupo dual de Z se identifica con S¹.¿Inversamente, un carácter en S¹ es de la forma z |-> zn para n ∈ Z. Puesto que S¹ es compacto, la topología en elgrupo dual es la de la convergencia uniforme que resulta ser la topología discreta. Como consecuencia de esto, eldual de S¹ se identifica con Z. El otro ejemplo de "grupo clásico", el grupo de los números reales R, es su propiodual. Los caracteres en R son de la forma φy: x |-> eixy. Con estas dualidades, la versión de la transformada deFourier a ser introducida después coincide con la transformada de Fourier en R, y la forma exponencial de la serie deFourier en Z.
El punto de vista abstractoMás precisamente, la construcción dual del grupo G^ de G es un funtor contravariante (.)^ : LCA -> LCAop
permitiendo que identifiquemos la categoría LCA de grupos topológicos abelianos localmente compactos con supropia categoría opuesta. Tenemos G^^ isomorfo a G, de un modo natural que es comparable al doble dual de losespacios vectoriales finito-dimensionales (un caso especial, para los espacios vectoriales reales y complejos). Ladualidad intercambia las subcategorías de grupos discretos y de grupos compactos. Si R es un anillo y G es unR-módulo izquierdo, el grupo dual G^ se convertirá en un R-módulo derecho; de esta manera podemos también verque los R-módulos izquierdos discretos serán dual de Pontryagin de los R-módulos derechos compactos. El anilloEnd(G) de endomorfismos en LCA es cambiado por la dualidad en su anillo opuesto (cambia la multiplicación alorden opuesto). Por ejemplo, si G es un grupo discreto cíclico infinito, G^ es un grupo del círculo: el primero tieneEnd(G) = Z por tanto también End(G^) = Z.
Compactificación de Bohr y casi-periodicidadUn uso hecho de la dualidad de Pontryagin es dar una definición general de una función casi-periódica en un grupo no compacto G en LCA. Para esto, definimos la compactificación B(G) de Bohr de G como H^, donde H es como grupo G^, pero dándole la topología discreta. Puesto que H -> G^ es continuo y un homomorfismo, el morfismo dual G -> B(G) queda definido, y realiza G como subgrupo de un grupo compacto. La restricción a G de las funciones continuas en B(G) da una clase de funciones casi-periódicas; se puede imaginarlas como análogas a las
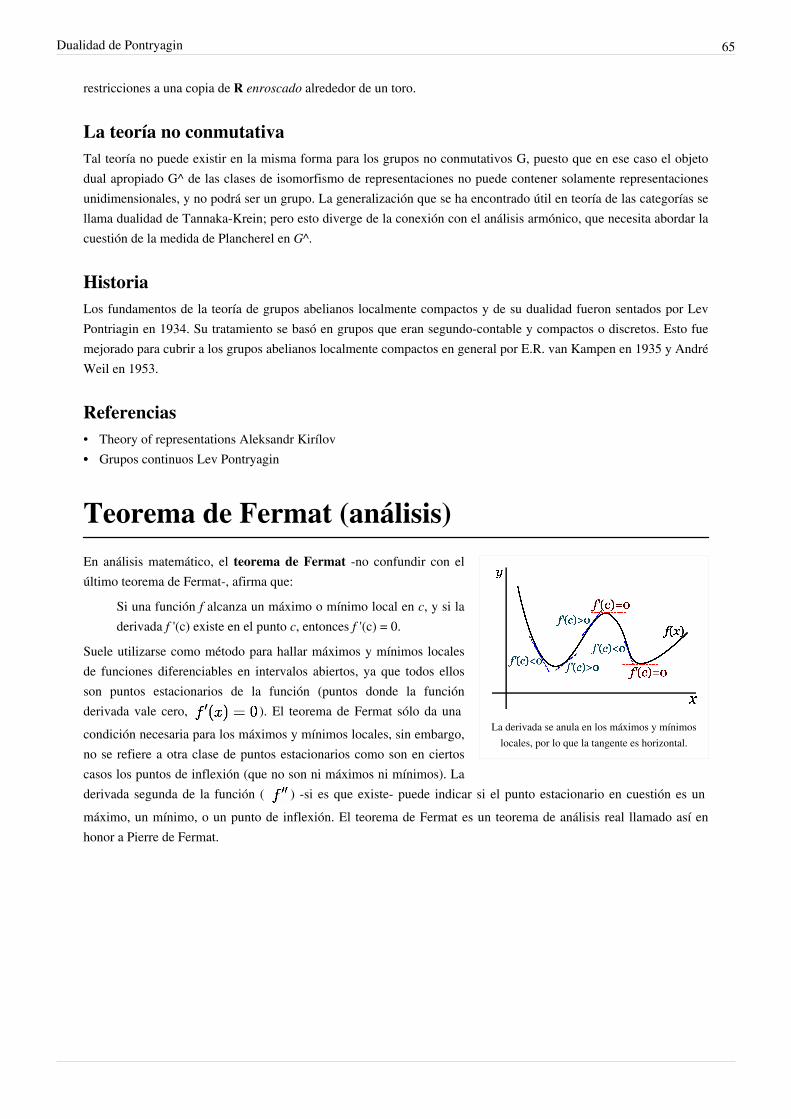
Dualidad de Pontryagin 65
restricciones a una copia de R enroscado alrededor de un toro.
La teoría no conmutativaTal teoría no puede existir en la misma forma para los grupos no conmutativos G, puesto que en ese caso el objetodual apropiado G^ de las clases de isomorfismo de representaciones no puede contener solamente representacionesunidimensionales, y no podrá ser un grupo. La generalización que se ha encontrado útil en teoría de las categorías sellama dualidad de Tannaka-Krein; pero esto diverge de la conexión con el análisis armónico, que necesita abordar lacuestión de la medida de Plancherel en G^.
HistoriaLos fundamentos de la teoría de grupos abelianos localmente compactos y de su dualidad fueron sentados por LevPontriagin en 1934. Su tratamiento se basó en grupos que eran segundo-contable y compactos o discretos. Esto fuemejorado para cubrir a los grupos abelianos localmente compactos en general por E.R. van Kampen en 1935 y AndréWeil en 1953.
Referencias• Theory of representations Aleksandr Kirílov•• Grupos continuos Lev Pontryagin
Teorema de Fermat (análisis)
La derivada se anula en los máximos y mínimoslocales, por lo que la tangente es horizontal.
En análisis matemático, el teorema de Fermat -no confundir con elúltimo teorema de Fermat-, afirma que:
Si una función f alcanza un máximo o mínimo local en c, y si laderivada f '(c) existe en el punto c, entonces f '(c) = 0.
Suele utilizarse como método para hallar máximos y mínimos localesde funciones diferenciables en intervalos abiertos, ya que todos ellosson puntos estacionarios de la función (puntos donde la funciónderivada vale cero, ). El teorema de Fermat sólo da unacondición necesaria para los máximos y mínimos locales, sin embargo,no se refiere a otra clase de puntos estacionarios como son en ciertoscasos los puntos de inflexión (que no son ni máximos ni mínimos). Laderivada segunda de la función ( ) -si es que existe- puede indicar si el punto estacionario en cuestión es unmáximo, un mínimo, o un punto de inflexión. El teorema de Fermat es un teorema de análisis real llamado así enhonor a Pierre de Fermat.
Teorema de Fuchs 66
Teorema de FuchsEn las matemáticas el teorema de Fuchs, expresa la propiedad de ciertas ecuaciones diferenciales de segundo orden,en cuanto a poseer una solución expresada mediante una serie de potencias.
TeoremaEn las matemáticas, el teorema de Fuch, establece la existencia de soluciones de una ecuación diferencial de segundoorden del tipo:
donde , y poseen expansión en series de potencias en .En este caso existe entonces una solución a esta ecuación diferencial de segundo orden que puede ser expresadamediante una serie de potencias en . Por lo tanto toda solución se puede escribir como
para algún real, donde su radio de convergencia es por lo menos mayor que el menor radio de convergencia de, y .
Referencia•• Asmar, Nakhlé H., "Partial differential equations with Fourier series and boundary value problems", ISBN
0-13-148096-0
Teorema de la función abiertaEn matemáticas, hay dos teoremas con el nombre "Teorema de la función abierta".
Análisis funcionalEn análisis funcional, el teorema de la función abierta, también conocido como el teorema de Banach-Schauder,es un resultado fundamental que establece: si A: X → Y es un operador lineal continuo sobreyectivo entre losespacios de Banach X y Y, entonces A es una función abierta (es decir si U es un conjunto abierto en X, entoncesA(U) es abierto en Y).La prueba utiliza el Teorema de categorías de Baire.El teorema de la función abierta tiene dos consecuencias importantes:• Si A: X → Y es un operador lineal continuo biyectivo entre los espacios de Banach X y Y, entonces el operador
inverso A-1: Y → X es continuo también (esto se llama el teorema de la función inversa).• Si A: X → Y es un operador lineal entre los espacios de Banach X y Y, y si para cada sucesión (xn) en X con xn →
0 y Axn → y se sigue que y = 0, entonces A es continuo (teorema del grafo cerrado).

Teorema de la función abierta 67
Análisis complejoEn análisis complejo, el teorema de la función abierta establece que si U es un subconjunto abierto conexo delplano complejo C y f: U → C es una función holomorfa no-constante, entonces f es una función abierta (es decirenvía subconjuntos abiertos de U a los subconjuntos abiertos de C).
Teorema de la función inversaEn la rama de la matemática denominada análisis matemático, el teorema de la función inversa proporciona lascondiciones suficientes para que una aplicación sea invertible localmente en un entorno de un punto p en términos desu derivada en dicho punto. Técnicamente es un teorema de existencia local de la función inversa. El teorema puedeenunciarse para aplicaciones en Rn o se puede generalizar a variedades diferenciables o espacios de Banach.
Enunciado del TeoremaLa versión en del teorema es la siguiente: Sea una función C1. Supongamos que para
, la diferencial es invertible y que . Entonces existen abiertos tales que, y es una función biyectiva por lo que la inversa de es C1 y por
lo tanto .Existe una versión del teorema en espacios de Banach, que es una generalización de lo anterior. Sin embargo, laversión presentada es la que se presenta frecuentemente en la literatura puesto que su comprensión es más fácil. Lademostración del teorema no es sencilla, puede consultarse en las referencias puesto que entre se requiere aplicar elteorema del punto fijo de Banach y la norma matricial además de otros resultados del análisis matemático que seobtienen de la caracterización de la convexidad.
EjemploConsideremos la función F de R2 en R2 definida por
Su matriz jacobiana es
y su determinante
Como el determinante e2x es no nulo en todo punto, aplicando el teorema, para cada punto p de R2, existe un entornode p en que F es invertible.

Teorema de la función inversa 68
Generalizaciones
Variedades diferenciablesEn este contexto, el teorema afirma que dada una aplicación F : M → N entre dos variedades diferenciables, si ladiferencial de F,
(dF)p : TpM → TF(p)N
es un isomorfismo lineal (es decir, isomorfismo entre espacios vectoriales) en un punto p de M, entonces existe unentorno abierto U de p tal que
F|U : U → F(U)es un difeomorfismo.Dicho de otro modo, si la diferencial de F es un isomorfismo en todos los puntos p de M, entonces la aplicación F esun difeomorfismo local.
Inversa globalEl teorema de la función inversa sólo garantiza localmente la existencia de una función inversa. Los requerimientospara la existencia de una inversa global son algo más complicados y no quedan garantizados por el cumplimiento delas condiciones del teorema de la función inversa. De hecho dada una función diferenciable:
Puede demostrarse que existe una constante si se cumple:
Tal que la función f admite inversa global, donde uf es el vector desplazamiento asociado a la función definido comola resta vectorial entre la imagen de un punto y su posición inicial:
Puede demostrarse que si el dominio es convexo, mientras que un dominio no convexo requiere .
ReferenciasPara una demostración con detalles véase:• Alejandro Jofré, Patricio Felmer, Paul Bosch, Matías Bulnes, Arturo Prat, Luis Rademacher, José Zamora, y
Mauricio Vargas. "Cálculo en Varias Variables - Apunte Completo" (2010). Disponible en: http:/ / www-old. dim.uchile. cl/ ~docencia/ calculo_vv/ material/ apunte_cvv_felmer-jofre. pdf
Para ejemplos de aplicación práctica:• Bombal, Marin & Vera: Problemas de Análisis matemático: Cálculo Diferencial, 1988, ed. AC, ISBN
84-7288-101-6.

Teorema de HahnBanach 69
Teorema de Hahn–BanachEn matemáticas, el teorema de Hahn–Banach es una herramienta importante en análisis funcional. Permiteextender cualquier operador lineal acotado definido en un subespacio vectorial al espacio vectorial que lo contiene.Debe su nombre a Hans Hahn y Stefan Banach quienes probaron este teorema independientemente en la década de1920.El teorema aparece en la literatura en formas diversas, tanto analíticas como geométricas.
El teorema de Hahn-Banach (forma analítica)Un funcional sublineal en un espacio vectorial sobre un cuerpo (que puede ser los números reales ocomplejos ) es una función que verifica:
Ejemplos de sublineales son cualquier norma vectorial y seminorma.Entonces la forma analítica del teorema de Hahn–Banach establece que si es un funcional sublineal, y
es un funcional lineal definido en un subespacio vectorial de que está acotado por sobre i.e.
entonces existe una extensión lineal de f a todo el espacio i.e. existe un funcional lineal tal que
y
La extensión no es en general única y la demostración, que utiliza el lema de Zorn, no da ningún método paraencontrar .
ConsecuenciasEl teorema tiene numerosas consecuencias, que a veces se llaman también "teorema de Hahn-Banach":• Hahn-Banach para espacios normados. Cualquier funcional lineal continuo f definido en un subespacio de un
espacio vectorial normado tiene una extensión continua a todo el espacio tal que la funcional y su extensióntienen la misma norma.
• Hahn-Banach (primera forma geométrica). Sean A y B dos subconjuntos convexos, no vacíos y disjuntos deun espacio vectorial normado sobre , siendo al menos uno de los dos subconjuntos abiertos. Entonces existe unhiperplano cerrado que separa A y B en sentido amplio.
• Hahn-Banach (segunda forma geométrica). Sean A y B dos subconjuntos convexos, no vacíos y disjuntos deun espacio vectorial normado sobre , siendo al menos uno de los dos subconjuntos cerrado y el otro compacto.Entonces existe un hiperplano cerrado que separa A y B en sentido estricto.
Referencias• Brézis, Haïm (1984). Análisis funcional: Teoría y aplicaciones. Alianza Editorial.

Teorema de Heine-Borel 70
Teorema de Heine-BorelEn el análisis matemático, el teorema de Heine-Borel (también llamado teorema deHeine-Borel-Lebesgue-Bolzano-Weierstraß o incluso teorema de Borel-Lebesgue) es uno que establececondiciones para que un subconjunto de o de sea compacto. Cuando se refiere al caso particular de la rectareal recibe el nombre de Teorema de Heine-Borel. En el resto de los casos, es frecuente llamarlo Teorema deBorel-Lebesgue.[cita requerida]
El teorema se enuncia de la siguiente manera:Si un conjunto tiene algunas de las siguientes propiedades, entonces tiene las otras dos:
1. es cerrado y acotado.2. es compacto.3. Todo subconjunto infinito de tiene un punto de acumulación en la frontera de E.
Las distintas formulaciones del teorema se deben su nombre a los matemáticos Heinrich Heine, Émile Borel, HenriLebesgue, Bernard Bolzano y Karl Weierstrass.
Demostración
Teoremas preliminaresLos subconjuntos cerrados de conjuntos compactos son compactos
Sea un conjunto cerrado y un conjunto compacto tales que .
Sea una cubierta abierta de , entonces es una cubierta abierta de (podemos agregarya que es abierto). Como es compacto entonces tiene un refinamiento finito que también cubre
a . Podemos quitar a y sigue cubriendo a . Así obtenemos un refinamiento finito de cualquier cubiertaabierta de
Si , donde es un conjunto infinito y es compacto, entonces tiene un punto deacumulación en
Si no tuviera puntos de acumulación en entonces donde es unaepsilon-vecindad y . Es claro que el conjunto de estas vecindades forman una cubierta par pero no tieneun refinamiento finito, lo mismo cumpliría para que contradiría la definición de que es compacto.
Toda k-celda es compacta
Sea una k-celda que consiste de todos los puntos x tal que y . Sea entonces si . Sea una cubierta arbitraria de y
supongamos que no se puede cubrir con una cantidad finita de 's.
Tomemos entonces los intervalos determinan celdas .
Entonces por lo menos un no se puede cubrir con una cantidad finita de 's. Lo llamaremos y asíobtenemos una sucesión tal que:1. .2. no se puede cubrir con una cantidad finita de 's.3. Si entonces .4.Digamos que , como cubre a entonces . Como es abierto
. Si tomamos n suficientemente grande tal que tenemos que este lo cual contradice la suposición de que no se puede cubrir con una cantidad finita de 's.
Teorema de Heine-Borel 71
Demostración del teorema de Heine-BorelSi cumple 1) entonces para alguna k-celda , y 1) implicaría 2) por los teoremas 1 y 3 anteriores.Si se cumple 2), entonces se cumple 3) por el teorema 2 anterior.Ahora falta demostrar que si cumple 3), entonces cumple 1): Si no es conexo entonces contiene un conjunto
tal que entonces el subconjunto es finito y tiene un límite en , lo cual contradice 3). Sino es abierto entonces existe un elemento que es un punto de acumulación de pero no está en .
Para existen tales que , entonces el conjunto es infinito y tienelímite contenido en él mismo, lo cual contradice 3).
Teorema de Heine-CantorEn matemáticas, el teorema de Heine-Cantor, llamado así por deberse a Eduard Heine (1821 - 1881) y GeorgCantor, establece que, si f : M → N es una función continua entre dos espacios métricos y M es compacto (cerrado yacotado), entonces f es uniformemente continua.
DemostraciónLa continuidad uniforme de una función se expresa como:
donde dM, dN son las funciones distancia en los espacios métricos M y N, respectivamente. Si ahora asumimos que fes continua en el espacio métrico compacto M pero no uniformemente continua, la negación de la continuidaduniforme de f queda así:
Eligiendo ε0, para todo δ positivo tenemos un par de puntos x e y en M con las propiedades arriba descritas. Sielegimos δ = 1/n para n = 1, 2, 3, ... obtenemos dos sucesiones xn, yn tales que
Como M es compacto, el teorema de Bolzano-Weierstrass demuestra la existencia de dos subsucesionesconvergentes ( a x0 y a y0). Se sigue que
Pero como f es continua y e convergen en el mismo punto, esta afirmación no puede ser cierta. Lacontradicción prueba que nuestra suposición de que f no es uniformemente continua es absurda: entonces f debe seruniformemente continua como afirma el teorema.
Teorema de Kirszbraun 72
Teorema de KirszbraunEn matemáticas, el teorema de Kirszbraun afirma que si U es un subconjunto del espacio euclídeo En y f: U → Em
es un mapa continuo de Lipschitz, entonces existe siempre un mapa continuo f':En → Em de Lipschitz que extiendael de f y tenga la misma constante de Lipschitz que f.
Teorema de Liouville (análisis complejo)En matemáticas, y en particular en el análisis complejo, el teorema de Liouville afirma que si una función esholomorfa en todo el plano complejo y está acotada, entonces es constante. Nótese que esta afirmación es falsa en losnúmeros reales (tómese, por ejemplo, la función , que está acotada pero no es constante).
Enunciado del teoremaSea una función entera[1] y acotada, es decir, existe tal que
;entonces resulta que es constante.Una versión más general de este teorema afirma que si es una función entera y si se tieneque , con para algún , entonces debe ser un polinomio de grado alo más . Como consecuencia directa de lo anterior, si , con , unpolinomio de grado , entonces es un polinomio de grado a lo más .
DemostraciónLa fórmula integral de Cauchy dice que
De modo que
Como podemos elegir tan grande como queramos, concluimos que para todo en . Finalmente,como está definida sobre un conjunto simplemente conexo, entonces f debe ser constante.
Teorema de Liouville y teorema fundamental del álgebraEl teorema de Liouville entrega una demostración simple del teorema fundamental del álgebra, es decir, de que todopolinomio no constante a coeficientes en tiene una raíz en . La demostración es la siguiente:
Sea un polinomio no constante, y supongamos que no tiene raíces. Luego, como todos los polinomios
son funciones enteras, se tiene que resulta ser también una función entera. Pero
(eso siempre ocurre para polinomios no constantes), luego , por lo
que resulta ser una función acotada. Luego, por el teorema de Liouville, es una función constante, porlo que también lo será. Eso contradice nuestra hipótesis inicial, y se concluye que entonces debe teneruna raíz.
Notar que se sigue fácilmente que entonces tiene tantas raíces como su grado (contando multiplicidad), puesbasta dividir cada vez por , donde es la raíz recién encontrada.
Teorema de Liouville (análisis complejo) 73
Consecuencias
Espectro de un operadorUna de las consecuencias interesantes del teorema de Liouville es que el espectro de un operador necesariamente esun conjunto no-vacío. Para verlo, veamos que el hecho de que fuera vacío contradice el teorema de Liouville. Sidicho espectro fuera vacío entonces la norma de la función resolvente:
Donde es un operador acotado de un espacio de Banach, estaría definida en todo el plano complejo y seríaholomorfa y acotada. Y eso implica que la función sería constante por el teorema de Liouville. Y dado que:
Por ser constante, tendría que ser 0 en todos sitios y eso contradiría el hecho de que el resolvente sea un operadorlineal acotado.
Notas[1] es derivable en el conjunto de los números complejos.
Enlaces externos• Liouville's theorem (http:/ / planetmath. org/ ?op=getobj& amp;from=objects& amp;id=1145) en PlanetMath• Weisstein, Eric W. « Liouville’s Boundedness Theorem (http:/ / mathworld. wolfram. com/
LiouvillesBoundednessTheorem. html)» (en inglés). MathWorld. Wolfram Research.
Teorema de representación conforme de RiemannEn análisis complejo el teorema del mapeo de Riemann o teorema de representación conforme de Riemannestablece que dado un dominio del plano complejo simplemente conexo cuya frontera contenga al menos un punto,existe una aplicación holomorfa y biyectiva de dicho dominio sobre el disco unidad. Tiene una relación inversa conla geometría hiperbólica de Lobachebski.El teorema se debe al matemático Bernhard Riemann quien lo enunció en su tesis doctoral de 1851 sobre funcionesde variable compleja.

Teoremas de Mertens 74
Teoremas de MertensEn matemáticas, los teoremas de Mertens (por Franz Martens, que los demostró) son tres resultados de teoría denúmeros enunciados en 1874 y que tratan sobre la densidad de los números primos, y otro resultado de análisis.
Teoría de números
Primer teorema de Mertens
Segundo teorema de Mertens
Ese número es la constante de Meissel-Mertens.
Tercer teorema de Mertens
donde γ es la constante de Euler-Mascheroni.
Teorema de Mertens en análisisSi una serie infinita real o compleja
converge a y otra
converge absolutamente a , entonces su producto de Cauchy converge a .
Teorema de Ostrowski y Reich 75
Teorema de Ostrowski y ReichEl Teorema de Ostrwoski-Reich es un teorema asociado a las técnicas de relajación en Análisis numérico quepuede enunciarse como sigue:Sea un sistema lineal de ecuaciones de la forma Ax=b, siendo A la matriz de coeficientes, x el vector deincógnitas, y b el vector de términos independientes. Si se quiere resolver el sistema según una técnica derelajación tal que el coeficiente de relajación sea 0<ω<2, con A una matriz simétrica y definida positiva, entonces latécnica de relajación convergerá para cualquier vector inicial aproximación de la solución.Si además A es tridiagonal,entonces la elección óptima del coeficiente de relajación vendrá dada por la expresión:
siendo ρ(T) el radio espectral de la matriz de transformación del método de Gauss-Seidel asociado al sistema encuestión.
Teorema de Peter-WeylEl Teorema de Peter-Weyl es un resultado básico en la teoría del análisis armónico, aplicado a grupos topológicosque son compactos, pero no necesariamente abelianos. Hermann Weyl, junto con su estudiante Peter, lo probó en laconfiguración de un grupo compacto de Lie, G. El teorema generaliza los hechos significantes sobre ladescomposición de la representación regular de un grupo finito, como fue descubierto por F.G. Frobenius e IssaiSchur.Para establecer el Teorema, primero es necesaria la idea del Espacio de Hilbert sobre G, L²(G); esto es razonablepuesto que la medida de Haar existe en G. Llamándolo H, el grupo G tiene una representación unitaria en Hactuando por la derecha o por la izquierda. Esto implica una representación de G× G (vía ρ((h,k))[f](g)=f(h-1gk)).Esta representación se descompone en la suma de por cada representación finita irreducible de G donde esla representación dual. Esto significa que hay una descripción de suma directa de H con la indicación de todas lasclases (hasta el isomorfismo) de representaciones unitarias irreducibles de G.Esto implica inmediatamente la estructura de H para las representaciones diestra o zurda de G, que es la suma directade cada ρ tantas veces como su dimensión (siempre finita).
Estructura de Grupos Topológicos CompactosDesde el teorema, se puede deducir un Teorema Estructural General significativo. Sea G un grupo topológicocompacto, que se asume "Hausdorff". Por cada sub-espacio V finito, dimensional e invariante en G de L²(G), dondeG actúa por la izquierda, se puede considerar la imagen de G en GL(V). Es cerrado, ya que G es compacto, y elsubgrupo del grupo de Lie GL(V). Después, el Teorema de Cartan (de Élie Cartan) que la imagen de G también esun grupo de Lie.Si ahora se toma el límite (en el sentido de la teoría de las categorías) sobre todos los espacios V, se obtiene unresultado acerca de G - puesto que G actúa en L²(G). Se puede decir entonces que G es un límite inverso de un grupoLie. Desde luego, puede no necesariamente ser un grupo de Lie: puede ser, por ejemplo, un grupo profinito.
Teorema de Picard 76
Teorema de PicardExisten varios teoremas que llevan por nombre Teorema de Picard, en referencia al matemático francés CharlesÉmile Picard:• El teorema de Picard-Lindelöf de existencia y unicidad de solución para ecuaciones diferenciales ordinarias.• Dos teoremas de análisis complejo conocidos como pequeño teorema de Picard y gran teorema de Picard.__DISAMBIG__
Teorema de Picard-LindelöfEl teorema de Picard-Lindelöf (muchas veces llamado simplemente teorema de Picard, otras teorema deCauchy-Lipschitz o teorema de existencia y unicidad) es un resultado matemático de gran importancia dentro delestudio de las ecuaciones diferenciales ordinarias (EDOs). Establece bajo qué condiciones puede asegurarse laexistencia y unicidad de solución de una EDO dado un problema de Cauchy (problema de valor inicial).
TeoremaEl teorema debe su nombre al matemático francés Charles Émile Picard y al topólogo finés Ernst Leonard Lindelöf,éste último enunció la teoría de Picard tras su muerte.
Enunciado general
"Sea , donde es abierto, una función continua y localmente Lipschitzrespecto de (interprétese como la forma estándar de una EDO n-dimensional de primer orden). Entonces,dado , podemos encontrar un intervalo cerrado donde existe
solución única del siguiente problema de Cauchy:
que cumple que los pares "De hecho, este puede ser encontrado de manera explícita, en la demostración se dan detalles de ello.
Un enunciado más restrictivoEl resultado anterior exige los requisitos mínimos que debe cumplir una función si queremos aplicar el teorema.Añadiendo más condiciones al enunciado original, podemos dar este otro más sencillo: "Sea
una función Lipschitz. Entonces, dados " existe una única
solución del problema de valor inicial
definida ".

Teorema de Picard-Lindelöf 77
ObservaciónEs importante observar que el teorema de Picard sólo nos garantiza la existencia y unicidad local de la solución deuna EDO. Es decir, más allá del intervalo proporcionado por el teorema (dado que su demostración es constructiva)no podemos decir nada, en principio, del comportamiento de la solución del problema de valor inicial. Es posiblecomplementar el teorema señalando que existe un intervalo abierto, que llamaremos intervalo maximal en el cualpuede garantizarse que la solución existe y es única; fuera de este intervalo, el teorema de Picard no puede aplicarse.
DemostraciónSea el cilindro compacto donde está definida, esto es
y . Sea , és decir, el valor de
máxima pendiente en módulo. Y finalmente sea la constante de Lipschtitz de respecto la segunda variable.Definimos el siguiente operador entre funciones continuas, el operador de Picard, como sigue:
dinifido como: .
Vamos a imponer que esté bien definido, es decir, que su imagen sea una función que tome valores en , esdecir, que la norma de sea menor que .
El último paso es
imposición, por lo que deberá ser que .Veamos ahora que el operador de Picard es contractivo bajo ciertas hipótesis sobre que más adelante podrán seromitidas.
Dadas dos funciones queremos:
. Pero
como es Lipschitz respecto la segunda variable tenemos que:
.
Esto es contractivo si o equivalentemente para tener igualdad si .Por lo tanto como el operador de Picard es un operador entre espacios de Banach (en particular espacios métricosinducidos por la norma) y contractivo, por el teorema del punto fijo de Banach, existe una única función
tal que es decir, solución del problema de valor inicial definida en dondedebe satisfacer las condiciones dadas, es decir, .
Optimización del intervalo de la soluciónAhora bien, hay un corolario del teorema del punto fijo de Banach que nos dice que si un operador escontractivo para alguna potencia entonces tiene un único punto fijo. Intentaremos aplicar este resultadoal operador de Picard. Pero antes veamos un pequeño lema que nos será muy útil para aplicar el anterior corolario.
Lema:
Lo demostraremos por inducción:Para ya lo hemos visto, suponemos cierto para y probemos para :
.
Teorema de Picard-Lindelöf 78
Por lo tanto ahora sí, teniendo esta desigualdad podemos asegurar que para suficientemente grande, la cantidady por lo tanto será contractivo y por el corolario anterior tendrá un único punto fijo. Por lo
que, finalmente, hemos podido optimizar el intervalo a tomar .Esto lo que nos dice es que el intervalo de definición de la solución no depende de la constante de Lipschitz delcampo, sino esencialmente en el intervalo de definición del campo y la máxima pendiente del mismo.
Principio de los intervalos encajadosEn matemática, se denomina familia de intervalos encajonados (o encajados) a una familia desubconjuntos de tales que:1. Cada uno de los conjuntos Ik es un intervalo, es decir, un conjunto de la forma
(intervalo cerrado), (intervaloabierto), o semiabierto, en que la desigualdad es estricta solamente en uno de los extremos.
2. Se cumple que , esto es, cada intervalo Ik está contenido en el anterior.3. Se tiene que, si los extremos de cada intervalo Ik son ak y bk, entonces , esto es, los
intervalos se hacen cada vez más pequeños y terminan siendo de longitud menor a cualquier cantidad positiva.[1]
Principio de los intervalos encajadosLa pregunta que surge ante una familia de intervalos encajonados es saber si existen números realesque pertenezcan a todos los elementos de esta familia, es decir, saber si el conjunto:
es vacío o no.Podemos comprobar que en el caso de conjuntos abiertos no hay un resultado general. Por ejemplo, la familia deintervalos es una familia de intervalos todos ellos no vacíos pero con intersección vacía, yaque dado un , ninguno de los intervalos Ik con contendrá a , y 0 no pertenece a ningunode los Ik. En cambio, la familia de intervalos encajonados sí posee intersección novacía, ya que .En cambio, para las familias de intervalos encajonados existe un resultado general, conocido como teorema oprincipio de los intervalos encajados, que estipula lo siguiente:
Dada una familia de intervalos cerrados encajonados no vacíos , ésta determina a un punto ysolo uno, es decir, tiene por intersección a un conjunto de un solo elemento x.
La prueba de este teorema es una aplicación del teorema de las sucesiones monótonas. Si ,tenemos que, al estar cada intervalo contenido en el anterior, se tiene que la sucesión es monótonacreciente y acotada superiormente por b1; asimismo, es monótona decreciente y acotada inferiormente pora1; luego, ambas sucesiones convergen a sendos valores a y b, respectivamente. Luego, por definición de intervalosencajonados, el límite de la sucesión (ak - bk) es 0, pero por teoremas de sucesiones este límite es a - b, por lo queconcluimos que a = b. Al ser todos los intervalos Ik cerrados, vemos que este número límite pertenece a todos losintervalos de la familia.Nótese que podemos demostrar que este teorema es lógicamente equivalente al axioma del supremo, es decir,podemos asumir este teorema como axioma y tomarlo como base para demostrar el axioma del supremo como unteorema y, por consiguiente, que el cuerpo de los números reales es un conjunto completo.[2]
Principio de los intervalos encajados 79
Este teorema tiene un análogo en los espacios n-dimensionales , que señala que cualquier familia de bolascerradas encajadas tiene por intersección un único punto.
Referencias[1] Arenas, F., Masjuan, G., Villanueva, F., Álgebra: Sucesiones, Ediciones de la Universidad Católica de Chile, 1988.[2][2] Ibid.
Teorema de representación de RieszHay varios teoremas bien conocidos en el análisis funcional mencionados como el teorema de representación deRiesz.
El teorema de representación de espacios de HilbertEste teorema establece una conexión importante entre un espacio de Hilbert y su espacio dual: si el cuerpo de baseson los números reales, los dos son isométricamente isomorfos; si el cuerpo de base son los números complejos, losdos son isométricamente anti-isomorfos. El teorema es la justificación para la notación bra-ket popular en eltratamiento matemático de la mecánica cuántica.Sea un espacio de Hilbert, y su espacio dual, consistente en todas las funciones lineales continuas de enel cuerpo base R o C. Si x es un elemento de , entonces φx está definido por
es un elemento de . Donde es un producto interno de . El teorema de representación de Riesz
establece que cada elemento de puede ser escrito unívocamente de esta forma:Teorema. La función
es un (anti-) isomorfismo isométrico, significando que:• Φ es biyectivo.• Las normas de x y de Φ(x) coinciden: ||x|| = ||Φ(x)||.• Φ es aditivo: Φ(x1 + x2) = Φ(x1) + Φ(x2).• Si el cuerpo base es R, entonces Φ(λ x) = λ Φ(x) para todo número real λ.• Si el cuerpo base es C, entonces Φ(λ x) = λ* Φ(x) para todo número λ complejo, donde λ* denota la conjugación
compleja de λ. La función inversa de Φ puede ser descrita como sigue.Dado un elemento φ de , el complemento ortogonal del núcleo de φ es un subespacio unidimensional de .Tómese un elemento diferente de cero z en el subespacio, y el conjunto x =z/||z||. Entonces Φ(x) = φ. El teorema fueprobado simultáneamente por Riesz y Fréchet en 1907.

Teorema de representación de Riesz 80
El teorema de representación para funcionales lineales en Cc(X)El teorema siguiente, representa funcionales lineales positivos en Cc(X) el espacio de funciones a valores complejoscontinuas de soporte compacto. Los conjuntos borelianos en la declaración siguiente refieren a la σ-álgebra generadapor los conjuntos abiertos. Una medida de Borel contable aditiva no negativa μ en un espacio de Hausdorfflocalmente compacto X es regular ssi• µ(K) < ∞ para cada K compacto;• Para cada conjunto de Borel E,
•• la relación
vale siempre que E sea abierto o cuando E es Borel y µ(E) < ∞.Teorema. Sea X un espacio de Hausdorff localmente compacto. Para cualquier funcional lineal positivo ψ en Cc(X),hay (G1) un &mu contable aditivo regular único de la medida de Borel; en X tales que
para toda f en Cc(X). Un enfoque de la teoría de la medida es comenzar con la medida de Radon, definida comofuncional lineal positiva en C(X). Ésta es la manera adoptada por Bourbaki; por supuesto asume que X comienzacomo espacio topológico, más bien que simplemente como conjunto. Para los espacios localmente compactos lateoría de la integración entonces se recupera.
El teorema de representación para el dual de C0(X)El teorema siguiente, también conocido como el teorema de Riesz-Markov da una realización concreta del espaciodual de C0(X), el conjunto de las funciones continuas en X que se desvanecen en el infinito. Los conjuntos borelianosdeterminados en la declaración del teorema se refieren a la σ-álgebra generada por los conjuntos abiertos. Esteresultado es similar al resultado de la sección precedente, pero no incluye el resultado anterior. Vea la observacióntécnica abajo. Si µ es una medida contable aditiva complejo-valorada de Borel, µ es regular ssi la medida contableaditiva no negativa |µ| es regular según lo definido arriba.Teorema. sea un espacio de Hausdorff localmente compacto X. Para cualquier funcional lineal continua ψ en C0(X),hay una medida contable de Borel regular única complejo-aditiva µ ; en X tal que:
para toda f en C0(X). La norma de ψ como funcional lineal es la variación total de µ, esto es
finalmente, ψ es positivo ssi la medida μ es no negativa.Observación. Un funcional lineal positivo en Cc(X) puede no extenderse a un funcional lineal acotado de C0(X). Poresta razón los resultados anteriores se aplican a situaciones sutilmente modificadas.

Teorema de Sturm 81
Teorema de SturmEl Teorema de Sturm fue desarrollado por el matemático francés Jacques Charles François Sturm. Es útil parahallar los ceros de una función polinómica en un determinado intervalo. Dice lo siguiente:
A partir de un polinomio dado , supongamos los siguientes polinomioscumpliendo lo siguiente:
...
...
...
(Esto es, básicamente, el Algoritmo de Euclides)
Para todo número real que no sea una raíz de , sea el número de variaciones en el signo de lasucesión numérica
en la que se omiten todos los ceros. Si y son números cualesquiera , para los cuales no seanula, entonces el número de raíces distintas en el intervalo (las raíces múltiples se cuentan sólo una vez) esigual a
Demostración del Teorema de SturmEn primer lugar hay que dejar claro que, dada una sucesión de números reales en la que previamente se haprescindido de posibles elementos nulos, se dice que dos términos consecutivos presentan variación cuando son designos opuestos. Por ejemplo, en la sucesión 1, 3, -5, -2, 7 presenta dos variaciones.
Establecido este concepto, consideremos una ecuación de grado que supondremos que admite
únicamente simples (lo que no restringe la generalidad, pues toda ecuación con raíces múltiples puede reducirse aotra que tienen las mismas raíces, pero simples. Este hecho se comprueba porque en la cadena anterior, es elmáximo común divisor de cualquier par de polinomios de la misma. Por ello, al dividir todos los polinomios por
conseguimos rebajar los órdenes de multiplicidad de las raíces a uno.Así pues, consideramos la llamada sucesión de Sturm resultante de dividir por . Llamamos a los términos dedicha sucesión: En estas condiciones, si es un cero de y , puesto que si alguno delos dos fuese cero, lo sería el otro en virtud de la relación:
y descendiendo sería !!! Lo cual es absurdo pues debería ser constante distinta de cero.Sea un intervalo cerrado cualquiera y estudiemos la variación de signo en ese intervalo. Para ello consideremos
todas las raíces ordenadas de menor a mayor de los polinomiosen el intervalo.
En los intervalos del tipo no se anula ningún polinomio de la cadena, por tanto no hay variaciones en elsigno, así pues, .

Teorema de Sturm 82
Visualización gráfica del Teorema de Sturm para raíces de
Pero supongamos ahora que es raíz de. Por lo visto antes, si
y son distintos de cero y, por tanto lo son en
y . Tenemos, pues,la siguiente situación:
Teniendo en cuenta que.
Luego en la sucesión siempre hay un cambio de signo, por lo que . Es decir, para valores de a laizquierda de hay una variación. Para valores a la derecha de hay otra variación. Por tanto al pasar por , lasvariaciones de signo no cambia, esto es, con a la izquierda de y un valor a la derechade sin ser ceros de .
Visualización gráfica del Teorema de Sturm para raíces de
Ahora consideremos que es raíz de. Por tanto será raíz simple de
. Según el algoritmo, y tendrán el mismo signo en un intervalo deesta nueva raíz . Esto quiere decir que sipara un intervalo (bien a la izquierda o a laderecha de ) la función tomasignos iguales que y , alpasar por el cero de ,esto es, , entonces tomarádistintos valores que y alotro lado de la raíz . A un lado de dicharaíz habrá variación nula de signo, y al otrolado habrá un cambio (variación) de signo.Lo cuál quiere decir ahora que
y, por tanto, hay variación neta de signo al pasar por una raíz de es decir, por .En resumen, si al pasar por un cero de se pierde (o se gana) una variación, mientras que al pasar por uncero de no aumenta ni disminuye el número de ellas, se concluye que las variaciones de la sucesión de
Sturm que se pierden (o ganan) cuando va desde hasta son tantas como las raíces de la ecuacióncontenidas en el intervalo
Bibliografía• Elementos de Matemáticas. Universidad de Valladolid. (1985)
Teorema de Bohr-Mollerup 83
Teorema de Bohr-MollerupEn análisis matemático, el teorema de Bohr–Mollerup llamado así debido a los matemáticos daneses Harald Bohry Johannes Mollerup, otorga una caracterización de la función gamma, definida para x > 0 por
como la única función f en el intervalo x > 0 que simultáneamente cumple las siguientes tres propiedades:
••• es una función convexa. (O sea, es logarítmicamente convexa.)Que el log f es convexo es a menudo expresado diciendo que f es log-convexo, en lo que refiere que una funciónlog-convexa es aquella función cuyo logaritmo es convexo.Un tratamiento elegante de este teorema se puede encontrar en el libro de Emil Artin The Gamma Function, el cualha sido reeditado por la AMS en una colección de escritos de Artin.Como dato curioso, el teorema fue publicado por primera vez en un libro de análisis complejo pensando Bohr yMollerup que ya había sido demostrado previamente.
Referencias• Weisstein, Eric W. «Bohr-Mollerup Theorem [1]» (en inglés). MathWorld. Wolfram Research.• Proof of Bohr-Mollerup theorem [2] en PlanetMath• Proof of Bohr-Mollerup theorem [3] en PlanetMath• Artin, Emil (1964). The Gamma Function. Holt, Rinehart, Winston.• Rosen, Michael (2006). Exposition by Emil Artin: A Selection. American Mathematical Society.• Mollerup, J., Bohr, H. (1922). Lærebog i Kompleks Analyse vol. III, Copenhagen. (Textbook in Complex Analysis)
Referencias[1] http:/ / mathworld. wolfram. com/ Bohr-MollerupTheorem. html[2] http:/ / planetmath. org/ ?op=getobj& amp;from=objects& amp;id=3808[3] http:/ / planetmath. org/ ?op=getobj& amp;from=objects& amp;id=6576
Teorema de factorización de Weierstrass 84
Teorema de factorización de WeierstrassEn matemática, concretamente en análisis complejo, el teorema de factorización de Weierstrass, llamado así enhonor a Karl Weierstrass, asegura que las funciones enteras pueden ser representadas mediante un producto queenvuelve sus ceros. Además, cualquier sucesión que tienda al infinito tiene asociada una función entera con cerosprecisamente en los puntos de esa sucesión.Una segunda forma extendida a funciones meromorfas permite considerar una función meromorfa dada como unproducto de tres factores: los polos, los ceros, y una función holomorfa asociada distinta de cero.
MotivaciónLas consecuencias del teorema fundamental del álgebra son dobles. La primera de ellas, cualquier sucesión finita
en el plano complejo tiene asociado un polinomio que tiene ceros precisamente en los puntos de esa sucesión,
La segunda de ellas, cualquier función polinómica es el plano complejo tiene una factorización
donde a es una constante distinta de cero y cn son los ceros de p.
Las dos formas del teorema de factorización de Weierstrass pueden ser pensadas como extensiones superiores de lasfunciones enteras. La necesidad de un mecanismo extra se demuestra cuando se considera el producto
si la sucesión no es finita. Esto nunca puede definir una función entera, porque el producto infinito noconverge. Así que, en general, no se puede definir una función entera de una sucesión de ceros preestablecidos orepresentar una función entera mediante sus ceros usando las expresiones dadas mediante el teorema fundamental delalgebra.Una condición necesaria para la convergencia de un producto infinito en cuestión es que, cada factor debeaproximarse a 1 cuando . Así que, parece lógico que se deba buscar una función que podría ser 0 en elpunto preestablecido y sin embargo, permanecer próximo a 1 cuando no se encuentre en ese punto, además de nointroducir más ceros de los establecidos. Esto se define con los factores elementales de Weierstrass. Estos factoressirven para el mismo propósito que los factores de arriba.
Los factores elementalesTambién se les conoce como factores primarios.[1]
Para , se definen los factores elementales como:
Su utilidad radica en el siguiente lema:Lema (15.8, Rudin) para |z| ≤ 1, n ∈ No

Teorema de factorización de Weierstrass 85
Las dos formas del teorema
Existencia de una función entera con ceros específicosA veces llamado como teorema de Weierstrass.
Sea una sucesión de números complejos distintos de cero tales que . Si es cualquiersucesión de enteros tales que para todo ,
entonces la función
es entera con ceros únicamente en los puntos . Si el número se produce en la sucesión exactamente mveces, entonces la función f tiene un cero en de multiplicidad m.• Nótese que la sucesión en la declaración del teorema siempre existe. Por ejemplo siempre se podría tomar
y se obtendría convergencia. Tal sucesión no es única: cambiando ésta un número finito de posiciones,o tomando otra secuencia p'n ≥ pn, no se «romperá» la convergencia.
• El teorema generaliza lo siguiente: sucesiones en conjuntos abiertos (y por lo tanto regiones) de la esfera deRiemann tienen funciones asociadas que son holomorfas en esos subconjuntos y tienen ceros en los puntos de lasucesión.
• Nótese también que el caso dado por el teorema fundamental del álgebra está incorporado aquí. Si la sucesiónes finita entonces se puede tomar y obtener: .
El teorema de factorización de WeierstrassA veces llamado como Teorema del producto/factor de Weierstrass.
Sea ƒ una función entera, y sea los ceros distintos de 0 de ƒ, repetidos acorde con su multiplicidad; supóngasetambién que ƒ tiene un cero en z = 0 de orden m ≥ 0 (un cero de orden m = 0 en z = 0 significa que ƒ(0) ≠ 0). Entoncesexiste una función entera g y una sucesión de enteros tales que
Ejemplos de factorización
•
•
Teorema de factorización de HadamardSi ƒ es una función finita con un orden ρ, entonces ésta admite una factorización
donde g(z) es un polinomio de grado q, y q ≤ ρ.

Teorema de factorización de Weierstrass 86
Referencias[1][1] , chapter 2.
Teorema de Hurwitz (análisis complejo)En análisis complejo, un campo de las matemáticas, el teorema de Hurwitz, llamado así por Adolf Hurwitz, exponeaproximadamente que, bajo ciertas condiciones, si una sucesión de funciones holomorfas convergen uniformementea una función holomorfa sobre conjuntos compactos, entonces después de un tiempo esas funciones y la funciónlímite tienen el mismo número de ceros en cualquier disco abierto.Más precisamente, sea un conjunto abierto en el plano complejo, y considérese una sucesión de funcionesholomorfas que converge uniformemente sobre subconjuntos compactos de a una función holomorfa Sea un disco abierto de centro y radio que es contenido en junto con su frontera. asúmase que
no tiene ceros sobre la frontera del disco. Entonces, existe un número natural tal que para todo mayorque las funciones y tienen el mismo número de ceros en La condición de que no tenga ceros sobre la frontera del disco es necesaria. Por ejemplo, considérese el discounitario, y la sucesión
para todo Ésta converge uniformemente a la cual no tiene ceros dentro del disco, pero cadatiene exactamente un cero en el disco, que es
Este resultado se cumple más generalmente para conjuntos convexos acotados pero es más usual expresado paradiscos.Una consecuencia inmediata de este teorema es el siguiente corolario. Si es un conjunto abierto y una sucesiónde funciones holomorfas converge uniformemente sobre subconjuntos compactos de a una funciónholomorfa y más aún, si no es cero en ningún punto en , entonces es o bien idénticamente cero onunca es cero.
Referencias• John B. Conway. Functions of One Complex Variable I. Springer-Verlag, New York, New York, 1978.• E. C. Titchmarsh, The Theory of Functions, second edition (Oxford University Press, 1939; reprinted 1985), p.
119.• Solomentsev, E.D. (2001), «Hurwitz theorem [1]», en Hazewinkel, Michiel (en inglés), Encyclopaedia of
Mathematics, Springer, ISBN 978-1556080104
• Hurwitz's theorem [2] en PlanetMath
Referencias[1] http:/ / www. encyclopediaofmath. org/ index. php?title=Hurwitz_theorem& oldid=14800[2] http:/ / planetmath. org/ ?op=getobj& amp;from=objects& amp;id=5756

Teorema de inversión de Lagrange 87
Teorema de inversión de LagrangeEn el ámbito del análisis matemático, el teorema de inversión de Lagrange, también denominado fórmula deLagrange-Bürmann , permite obtener la expansión en serie de Taylor de la función inversa de una funciónanalítica.
Enunciado del teoremaSi la dependencia entre las variables w y z se encuentra definida de forma implícita mediante una ecuación del tipo
donde f es analítica en un punto a y f '(a) ≠ 0. Entonces es posible invertir o resolver la ecuación para w:
donde g es analítica en el punto b = f(a). Esto es también denominado reversión de series.La expansión en serie de g es
Esta fórmula también vale para series de potencia formales y puede ser generalizada de varias maneras. Puede serformulada para funciones de varias variables, puede ser extendida para cubrir el caso F(g(z)) para una funciónanalítica F, y puede ser generalizada para el caso f '(a) = 0, donde la inversa g es una función multivaluada.El teorema fue demostrado por Lagrange[1] y generalizado por Hans Heinrich Bürmann,[2][3][4] ambos a finales delsiglo XVIII. Existe una deducción directa utilizando análisis complejo e integración de contorno; la version de seriescomplejas de potencia formales es claramente una consecuencia de conocer la fórmula de polinomios, de forma quese pueda aplicar la teoría de funciones analíticas. En realidad, la maquinaria de la teoría de funciones analíticas soloentra en un punto formal en esta demostración, lo que hace falta es alguna propiedad del residuo formal, y existe unademostración formal directa.
Referencias[1][1] (Note: Although Lagrange submitted this article in 1768, it was not published until 1770.)[2] Bürmann, Hans Heinrich, “Essai de calcul fonctionnaire aux constantes ad-libitum,” submitted in 1796 to the Institut National de France. For
a summary of this article, see:[3][3] Bürmann, Hans Heinrich, "Formules du développement, de retour et d'integration," submitted to the Institut National de France. Bürmann's
manuscript survives in the archives of the École Nationale des Ponts et Chaussées [National School of Bridges and Roads] in Paris. (See ms.1715.)
[4] A report on Bürmann's theorem by Joseph-Louis Lagrange and Adrien-Marie Legendre appears in: "Rapport sur deux mémoires d'analyse duprofesseur Burmann," (http:/ / gallica. bnf. fr/ ark:/ 12148/ bpt6k3217h. image. f22. langFR. pagination) Mémoires de l'Institut National desSciences et Arts: Sciences Mathématiques et Physiques, vol. 2, pages 13-17 (1799).
Teorema de inversión de Lagrange 88
Enlaces externos• Weisstein, Eric W. « Lagrange expansion (http:/ / mathworld. wolfram. com/ LagrangeExpansion. html)» (en
inglés). MathWorld. Wolfram Research.• Weisstein, Eric W. « Lagrange Inversion Theorem (http:/ / mathworld. wolfram. com/
LagrangeInversionTheorem. html)» (en inglés). MathWorld. Wolfram Research.• Weisstein, Eric W. « Bürmann's Theorem (http:/ / mathworld. wolfram. com/ BuermannsTheorem. html)» (en
inglés). MathWorld. Wolfram Research.• Weisstein, Eric W. « Series Reversion (http:/ / mathworld. wolfram. com/ SeriesReversion. html)» (en inglés).
MathWorld. Wolfram Research.• Series de Bürmann-Lagrange (http:/ / eom. springer. de/ b/ b017790. htm)
Teorema de la gráfica cerradaEn análisis funcional, el teorema de la gráfica cerrada establece lo siguiente:
Sean X e Y dos espacios de Banach, entonces todo operador f:X → Y lineal cuya gráfica sea un cerrado en elespacio topológico producto X×Y es continua.
Este teorema se demuestra usando el teorema de la función abierta, y es casi imprescindible para resolver ciertosproblemas de análisis funcional que no se pueden resolver con técnicas menos avanzadas.
CorolarioTiene un corolario, que es el que se suele usar en la práctica:
Sean X e Y espacios de Banach, y f:X → Y un operador lineal. Supongamos que para toda sucesión (xn)convergente en X existe lim f(xn) y es igual a f(lim xn). En estas condiciones, f es continua.

Teorema de Sard 89
Teorema de SardTeorema de Sard, también conocido como Lema de Sard o el Teorema de Morse-Sard, es un resultado deAnálisis matemático que afirma que la imagen de la serie de puntos críticos de una Función continuamentediferenciable f de un espacio euclidiano o colector a otro tiene medida de Lebesgue 0 - forman un conjunto nulo .Esto hace que sea "pequeño" en el sentido de una propiedad genérica.
DeclaraciónMás explícitamente ( Sternberg (1964 , Teorema II.3.1); Sard (1942 )), que
Sea , (eso, . Sea denota el conjunto crítico de el cual es un conjuntode putnos en los cuales el Jacobiano de tiene rango . Entonces la imagen tiene unamedidad de Lebesgue 0 en .
Referencias• Sternberg, Shlomo (1964), Lectures on differential geometry, Englewood Cliffs, NJ: Prentice-Hall, pp. xv+390.• Morse, Anthony P. (January 1939), «The behaviour of a function on its critical set», Annals of Mathematics 40
(1): 62–70, doi: 10.2307/1968544 [1].• Sard, Arthur (1942), «The measure of the critical values of differentiable maps [2]», Bulletin of the American
Mathematical Society 48 (12): 883–890, doi: 10.1090/S0002-9904-1942-07811-6 [3].• Sard, Arthur (1965), «Hausdorff Measure of Critical Images on Banach Manifolds», American Journal of
Mathematics 87 (1): 158–174, doi: 10.2307/2373229 [4] and also Sard, Arthur (1965), «Errata to Hausdorff measuresof critical images on Banach manifolds», American Journal of Mathematics 87 (3): 158–174, doi: 10.2307/2373229[4].
• Smale, Stephen (1965), «An Infinite Dimensional Version of Sard's Theorem», American Journal of Mathematics87 (4): 861–866, doi: 10.2307/2373250 [5].
Referencias[1] http:/ / dx. doi. org/ 10. 2307%2F1968544[2] http:/ / www. ams. org/ bull/ 1942-48-12/ S0002-9904-1942-07811-6/ home. html[3] http:/ / dx. doi. org/ 10. 1090%2FS0002-9904-1942-07811-6[4] http:/ / dx. doi. org/ 10. 2307%2F2373229[5] http:/ / dx. doi. org/ 10. 2307%2F2373250

Teorema de superposición de Kolmogórov 90
Teorema de superposición de KolmogórovEl teorema de superposición de Kolmogórov es un notable teorema de A. Kolmogórov que establece que unafunción continua de diversas variables se puede presentar como una superposición de funciones de una únicavariable. Más concretamente establece que una función continua de n variables definida sobre el conjunto [0,1]n
siempre puede expresarse mediante sumas y 2(n+1)(n+1) funciones de una sola variable en la forma:
Donde las 2n+1 funciones gi y las 2(n+1)n funciones hij son funciones continuas de una variable. Kolmogórovdeclaró que este resultado fue el más difícil desde el punto de vista técnico al que se había enfrentado y el que leexigió un período más largo de concentración en el mismo problema.[1]
Referencias[1] C. Sánchez y C. Valdés, Kolmogórov: el zar del azar, p. 151
Bibliografía• Jürgen Braun, Michael Griebel: On a constructive proof of Kolmogorov’s superposition theorem (http:/ /
wissrech. ins. uni-bonn. de/ research/ pub/ braun/ remonkoe. pdf).
Teorema de Weierstrass-CasoratiEn análisis complejo, una rama de las matemáticas el teorema de Casorati–Weierstrass describe elcomportamiento de funciones meromorfas cerca de una singularidad esencial. Recibe su nombre de Karl TheodorWilhelm Weierstrass y Felice Casorati.
Enunciado del teoremaSea un conjunto abierto U en el plano complejo que contiene a z0 y la función holomorfa f en U \ z0, pero tiene unasingularidad esencial en z0 . El teorema de Casorati–Weierstrass entonces establece que:
si V es cualquier vecindad de z0 contenido en U, entonces f(V \ z0) es denso en C.Esto puede decirse del siguiente modo:
para todo ε > 0, δ >0, y todo número complejo w, existe otro complejo z en U con |z − z0| < δ y |f(z) − w| < ε .O en términos más descriptivos:
f es arbitrariamente cercano a cualquier complejo en el entorno de z0.Esta forma del teorema se aplica sólo si f es meromorfa en U \ z0.El teorema es considerablemente reforzado por el gran teorema de Picard que establece que f asume cualquier valorcomplejo con una posible excepción.

Teorema de Weierstrass-Casorati 91
Ejemplos
Gráfica de la función exp(1/z), centrada en la singularidadesencial en z = 0. La coloración representa el argumentocomplejo y la luminosidad el valor absoluto. Esta imagen
muestra como acercándose a la singularidad desde diferentesdirecciones se obtienen diferentes comportamientos (alcontrario que un polo que sería uniformemente blanco).
La función f(z) = exp(1/z) tiene una singularidad esencial en z0= 0, pero la función g(z) = 1/z3 no (tiene un polo en 0).
Considerese la función
Esta función tiene el siguiente desarrollo en serie de Laurenten torno a z0:
Empleando un cambio de variable a coordenadas polaresla función, ƒ(z) = e1/z toma la forma:
Tomando el valor absoluto a ambos lados:
Entonces para valores θ tales que cos θ > 0, tenemos quea medida que , y para ,
a medida que .Consideremos qué ocurre cuando z toma valores en un círculode diámetro 1/R tangente al eje imaginario. Este círculo viene dado por r = (1/R) cos θ, luego,
y
Entonces, puede tomar cualquier valor distinto de 0 tomarno el R adecuado. A medida que en el
círculo, con R fijo. De modo que la ecuación:
toma todos los valores en el cículo unitario un número infinito de veces. Entonces f(z) toma todos los valores de cadauno de los números complejos un número infinito de veces exceptuando el 0.
Demostración del teoremaA continuación se presenta una pequeña demostración del teorema: Sea f una función meromorfa en un entorno localV \ z0, y sea z0 una singularidad esencial. Supongamos por reducción al absurdo que existe un b al cual la funciónno se acerca indefinidadmente; es decir, supongamos que existe un cierto complejo b y un ε > 0 tal que |f(z) − b| ≥ εpara todo z en V perteneciente al dominio de f . La nueva funciónn:
ha de ser holomorfa en V \ z0, anulandose en los polos de f. En virtud del teorema de extensión analítica deRiemann puede ser extendida analíticamente para todo V, de modo que la función original se puede expresar entérminos de g de la siguiente forma:
para todo z en V \ z0. Considérense las dos posibles situaciones
Teorema de Weierstrass-Casorati 92
Si el límite es 0, entonces f tiene un polo en z0 . Si el límite es distinto de 0, entonces z0 no es una singularidad de f.Ambas posibilidades contradicen la suposición de que z0 es una singularidad esencial de f . de modo que el teoremaqueda probado.
Teorema de WeierstrassEl Teorema de Weierstrass es un teorema de análisis real que establece que una función continua en un intervalocerrado y acotado (de números reales) alcanza sus valores máximo y mínimo en puntos del intervalo. También sepuede enunciar en términos de conjuntos compactos. El teorema establece que una función continua transformaintervalos conexos en intervalos compactos, entendiéndose por intervalo compacto aquel que es cerrado (sus puntosfrontera le pertenecen) y acotado.
EnunciadoSi una función f es continua en un intervalo compacto (cerrado y acotado) entonces hay al menos dos puntosx1,x2 pertenecientes a [a,b] donde f alcanza valores extremos absolutos, es decir , paracualquier
DemostraciónComo está acotada al ser [a,b] un compacto y f una función continua aplicada sobre un compacto,podemos asegurar que existe un supremo finito llamado M. Es necesario encontrar un punto d en [a,b] que satisfagaM = f(d). Digamos que n es un número natural. Como M es supremo, M – 1/n no lo es para f. Entonces, existe unpunto dn en [a,b] tal que M – 1/n < f(dn). Esto genera una sucesión dn según vamos dando valores naturales a n.Como M es supremo por f, tenemos que M – 1/n < f(dn) ≤ M para todo n natural. Entonces, si hacemos tender n haciainfinito por el criterio de compresión tenemos que f(dn) converge a M.Tenemos una sucesión que converge al supremo del conjunto, ahora hay que ver que precisamente el punto dónde seasume el supremo es el punto d, incluido en el conjunto, y por lo tanto este supremo es un máximo. El Teorema deBolzano-Weierstrass nos dice que existe una subsucesión , que converge a un punto d y, dado que [a,b] escerrado, d está en [a,b]. Como f es continua en el conjunto (incluyendo el punto d), la sucesión f( ) converge af(d). Pero f(dnk) es una subsucesión de f(dn) que converge a M, entonces M = f(d), ya que si una sucesión esconvergente a un punto cualquier sucesión parcial converge al mismo punto. Por lo tanto, f asume el supremo M enel punto d, y como d es del conjunto es el máximo.La demostración para ver que el ínfimo del conjunto [a,b] por f se asume dentro del conjunto y por lo tanto esmínimo es análoga a ésta.∎

Teorema de Weierstrass 93
Generalización del Teorema de WeierstrassEl teorema de Weierstrass también es válido para funciones escalares o vectoriales de varias variables. La imagenpor un campo continuo de un conjunto compacto es un conjunto compacto, siendo este un escalar vectorialcompacto.
Si es una función continua en ( es compacto de ) entonces es unconjunto compacto de .
CorolarioEl conjunto imagen de la función f está acotado, es decir:
donde simboliza el valor mínimo absoluto y el valor máximo absoluto.
Enlaces externos• Extreme Value Theorem [1] en PlanetMath• Weisstein, Eric W. «Extreme Value Theorem [2]» (en inglés). MathWorld. Wolfram Research.
Referencias[1] http:/ / planetmath. org/ ?op=getobj& amp;from=objects& amp;id=6023[2] http:/ / mathworld. wolfram. com/ ExtremeValueTheorem. html
Teorema de Gauss-Bonnet
Un ejemplo de región compleja donde el teorema de Gauss-Bonnet puede seraplicado. Se muestra el signo de la curvatura geodésica.
El teorema de Gauss-Bonnet en geometríadiferencial es una proposición importantesobre superficies que conecta su geometría(en el sentido de la curvatura) con sutopología (en el sentido de la característicade Euler).
Definición
Supóngase que M es una variedad deRiemann compacta orientable de dimensión2, con borde . Denótese por K lacurvatura gaussiana en los puntos de M ypor kg la curvatura geodésica en los puntosde . Entonces
donde χ(M) es la característica de Euler de M.
El teorema se puede aplicar en particular si la variedad no tiene borde, en cuyo caso la integral puede
ser omitido.
Teorema de Gauss-Bonnet 94
Si se dobla o deforma la variedad M su característica de Euler no cambiará, mientras que las curvaturas en los puntosdados sí. El teorema requiere algo asombroso, que la integral total de todas las curvaturas siga siendo igual.
GeneralizacionesUna generalización a n dimensiones fue encontrada en los años 40 por Allendoerfer, Weil y Chern. Ver el teoremade Gauss-Bonnet generalizado y el homomorfismo de Chern-Weil.
Enlaces externos• Weisstein, Eric W. «Gauss-Bonnet Formula [1]» (en inglés). MathWorld. Wolfram Research.
Referencias[1] http:/ / mathworld. wolfram. com/ Gauss-BonnetFormula. html
Teorema de Gauss-Bonnet generalizadoEn matemáticas, el teorema de Gauss-Bonnet generalizado presenta la característica de Euler de una variedad deRiemann cerrada como integral de cierto polinomio derivado de su curvatura. Es una generalización directa delteorema de Gauss-Bonnet a la dimensión par en general.
DefiniciónSea M una variedad de Riemann compacta de la dimensión 2n y sea Ω la forma de curvatura de la conexión deLevi-Civita. Esto significa que Ω es -valorada en M. Tal Ω puede ser mirado como matriz anti-simétrica
2n×2n cuyas entradas sean 2-formas, así que es una matriz sobre el anillo conmutativo . Uno puede por
lo tanto tomar el Pfaffiano de Ω Pf(Ω) que resulta ser una 2n-forma.El teorema de Gauss-Bonnet generalizado establece que
donde χ denota la característica de Euler de M.
Otras generalizacionesComo con el teorema de Gauss-Bonnet, hay generalizaciones cuando M es una variedad con borde.
Enlaces externos• Some Implications of the Generalized Gauss-Bonnet Theorem (AMS) American Mathematical Society [1]
Referencias[1] http:/ / www. ams. org/ journals/ tran/ 1964-112-03/ S0002-9947-1964-0163271-8/ S0002-9947-1964-0163271-8. pdf
Teorema de Stokes 95
Teorema de StokesEl teorema de Stokes en geometría diferencial es una proposición sobre la integración de formas diferenciales quegeneraliza varios teoremas del cálculo vectorial. Se nombra así por George Gabriel Stokes (1819-1903), a pesar deque la primera formulación conocida del teorema fue realizada por William Thomson y aparece en unacorrespondencia que él mantuvo con Stokes.
IntroducciónEl teorema fundamental del cálculo establece que la integral de una función f en el intervalo [a, b] puede sercalculada por medio de una antiderivada F de f:
El teorema de Stokes es una generalización de este teorema en el siguiente sentido:
• Para la F elegida, . En el lenguaje de las formas diferenciales es decir que f(x) dx es la derivada
exterior de la 0-forma (como por ejemplo una función) F: dF = f dx. El teorema general de Stokes se aplica aformas diferenciales mayores en vez de F.
• En un lenguaje matemático, el intervalo abierto (a, b) es una variedad matemática unidimensional. Su frontera esel conjunto que consiste en los dos puntos a y b. Integrar f en ese intervalo puede ser generalizado como integrarformas en una variedad matemática de mayor orden. Para esto se necesitan dos condiciones técnicas: la variedadmatemática debe ser orientable, y la forma tiene que ser compacta de manera que otorgue una integral biendefinida.
• Los dos puntos a y b forman parte de la frontera del intervalo abierto. Más genéricamente, el teorema de Stokes seaplica a variedades orientadas M con frontera. La frontera ∂M de M es una variedad en sí misma y hereda laorientación natural de M. Por ejemplo, la orientación natural del intervalo da una orientación de los dos puntosfrontera. Intuitivamente a hereda la orientación opuesta a b, al ser extremos opuestos del intervalo. Entonces,integrando F en los dos puntos frontera a, b es equivalente a tomar la diferencia F(b) − F(a).
Por lo que el teorema fundamental relaciona la integral de una función sobre un intervalo, con una integral o suma dela primitiva de la función en los límites que encierran dicho intervalo:
Por otro lado el teorema de Green hace algo similar en dos dimensiones, relaciona la integral a lo largo de una curvasimple con la integral de una combinación de derivadas sobre un área limitada por la curva simple:
Similarmente el teorema de la divergencia relaciona la integral de una función sobre una superficie con la integral deuna combinación de derivadas sobre el interior del conjunto:
El teorema de Stokes generaliza todos estos resultados, relacionando la integral sobre una frontera con la integral deuna función "derivada" sobre el interior de la región limitada por la frontera.
Teorema de Stokes 96
Formulación generalSea M una variedad de dimensión n diferenciable por trozos orientada compacta y sea ω una forma diferencial en Mde grado n-1 y de clase C¹. Si ∂ M denota el límite de M con su orientación inducida, entonces
aquí d es la derivada exterior, que se define usando solamente la estructura de variedad. El teorema debe serconsiderado como generalización del teorema fundamental del cálculo y, de hecho, se prueba fácilmente usando esteteorema.El teorema se utiliza a menudo en situaciones donde M es una subvariedad orientada sumergida en una variedad másgrande en la cual la forma ω se define.El teorema se extiende fácilmente a las combinaciones lineales de las subvariedades diferenciables por trozos, las,así llamadas, cadenas. El teorema de Stokes demuestra entonces que las formas cerradas definidas módulo una formaexacta se pueden integrar sobre las cadenas definidas módulo borde. Ésta es la base para el apareamiento entre losgrupos de homología y la cohomología de de Rham.El clásico teorema de Kelvin-Stokes
que relaciona la integral de superficie del rotacional del campo vectorial sobre una superficie Σ en el 3-espacioeuclidiano a la integral de línea del campo vectorial sobre su borde, es un caso especial del teorema de Stokesgeneralizado (con n = 2) una vez que identifiquemos el campo vectorial con una 1-forma usando la métrica en el3-espacio euclidiano.Asimismo el teorema de Ostrogradsky-Gauss o Teorema de la divergencia:
es un caso especial si identificamos un campo vectorial con la n-1 forma obtenida contrayendo el campo vectorialcon la forma de volumen euclidiano.El teorema fundamental del cálculo y el teorema de Green son también casos especiales del teorema de Stokesgeneralizado.La forma general del teorema de Stokes que usa formas diferenciales es de más alcance que los casos especiales, porsupuesto, aunque los últimos son más accesibles y a menudo son considerados más convenientes por físicos eingenieros.Otra forma de escribir el mismo teorema es la siguiente:
Donde es un campo vectorial cualquiera.Establece que la integral de superficie del rotacional de un campo vectorial sobre una superficie abierta es igual a laintegral (curvilínea) cerrada del campo vectorial a lo largo del contorno que limita la superficie.
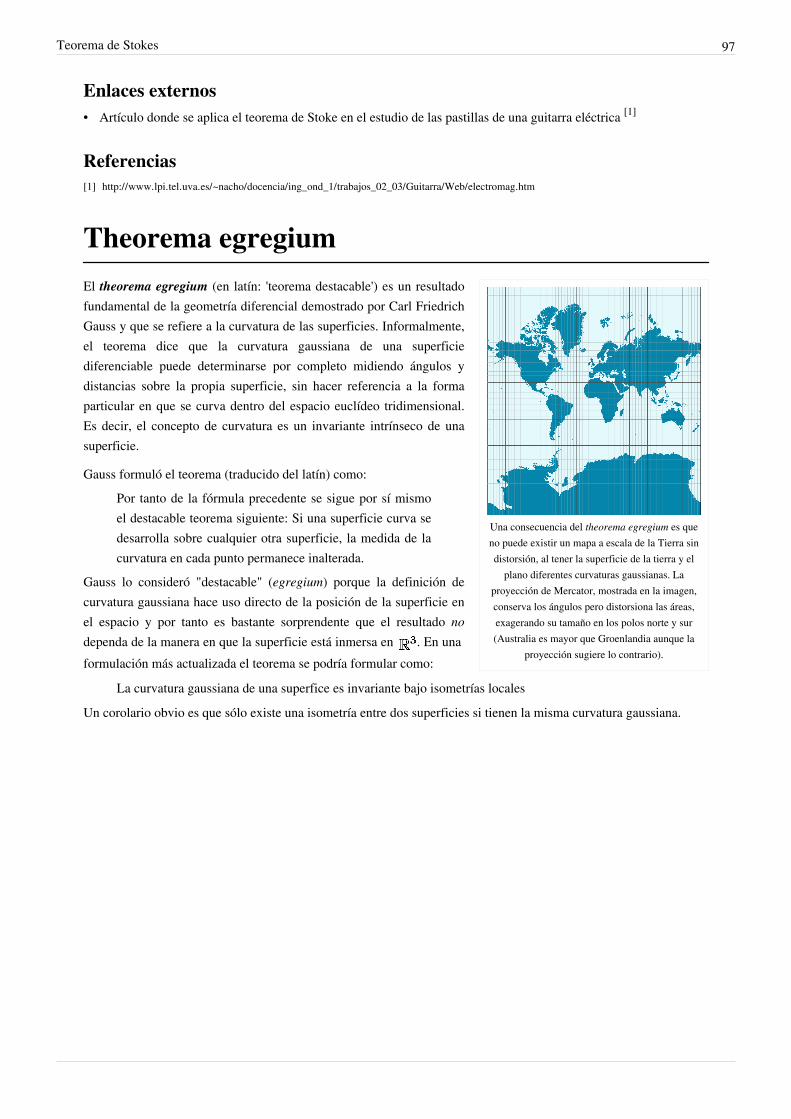
Teorema de Stokes 97
Enlaces externos• Artículo donde se aplica el teorema de Stoke en el estudio de las pastillas de una guitarra eléctrica [1]
Referencias[1] http:/ / www. lpi. tel. uva. es/ ~nacho/ docencia/ ing_ond_1/ trabajos_02_03/ Guitarra/ Web/ electromag. htm
Theorema egregium
Una consecuencia del theorema egregium es queno puede existir un mapa a escala de la Tierra sindistorsión, al tener la superficie de la tierra y el
plano diferentes curvaturas gaussianas. Laproyección de Mercator, mostrada en la imagen,conserva los ángulos pero distorsiona las áreas,exagerando su tamaño en los polos norte y sur(Australia es mayor que Groenlandia aunque la
proyección sugiere lo contrario).
El theorema egregium (en latín: 'teorema destacable') es un resultadofundamental de la geometría diferencial demostrado por Carl FriedrichGauss y que se refiere a la curvatura de las superficies. Informalmente,el teorema dice que la curvatura gaussiana de una superficiediferenciable puede determinarse por completo midiendo ángulos ydistancias sobre la propia superficie, sin hacer referencia a la formaparticular en que se curva dentro del espacio euclídeo tridimensional.Es decir, el concepto de curvatura es un invariante intrínseco de unasuperficie.
Gauss formuló el teorema (traducido del latín) como:Por tanto de la fórmula precedente se sigue por sí mismoel destacable teorema siguiente: Si una superficie curva sedesarrolla sobre cualquier otra superficie, la medida de lacurvatura en cada punto permanece inalterada.
Gauss lo consideró "destacable" (egregium) porque la definición decurvatura gaussiana hace uso directo de la posición de la superficie enel espacio y por tanto es bastante sorprendente que el resultado nodependa de la manera en que la superficie está inmersa en . En unaformulación más actualizada el teorema se podría formular como:
La curvatura gaussiana de una superfice es invariante bajo isometrías localesUn corolario obvio es que sólo existe una isometría entre dos superficies si tienen la misma curvatura gaussiana.
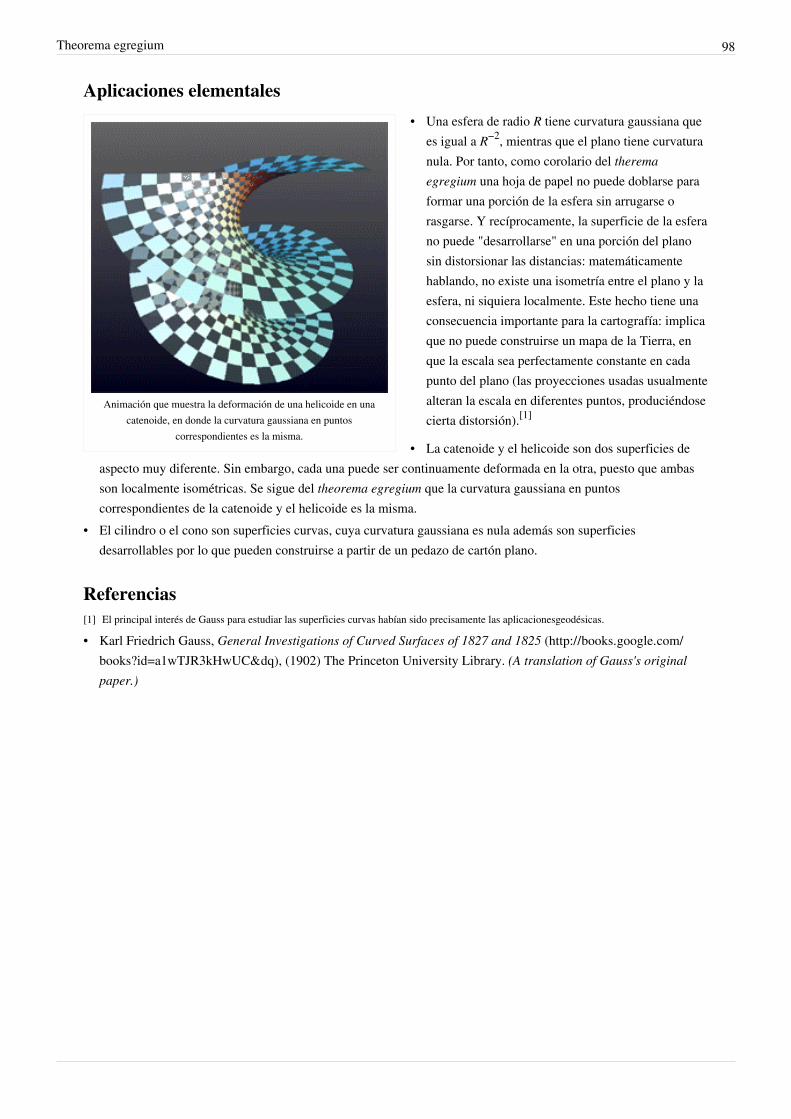
Theorema egregium 98
Aplicaciones elementales
Animación que muestra la deformación de una helicoide en unacatenoide, en donde la curvatura gaussiana en puntos
correspondientes es la misma.
• Una esfera de radio R tiene curvatura gaussiana quees igual a R−2, mientras que el plano tiene curvaturanula. Por tanto, como corolario del theremaegregium una hoja de papel no puede doblarse paraformar una porción de la esfera sin arrugarse orasgarse. Y recíprocamente, la superficie de la esferano puede "desarrollarse" en una porción del planosin distorsionar las distancias: matemáticamentehablando, no existe una isometría entre el plano y laesfera, ni siquiera localmente. Este hecho tiene unaconsecuencia importante para la cartografía: implicaque no puede construirse un mapa de la Tierra, enque la escala sea perfectamente constante en cadapunto del plano (las proyecciones usadas usualmentealteran la escala en diferentes puntos, produciéndosecierta distorsión).[1]
• La catenoide y el helicoide son dos superficies deaspecto muy diferente. Sin embargo, cada una puede ser continuamente deformada en la otra, puesto que ambasson localmente isométricas. Se sigue del theorema egregium que la curvatura gaussiana en puntoscorrespondientes de la catenoide y el helicoide es la misma.
• El cilindro o el cono son superficies curvas, cuya curvatura gaussiana es nula además son superficiesdesarrollables por lo que pueden construirse a partir de un pedazo de cartón plano.
Referencias[1] El principal interés de Gauss para estudiar las superficies curvas habían sido precisamente las aplicacionesgeodésicas.
• Karl Friedrich Gauss, General Investigations of Curved Surfaces of 1827 and 1825 (http:/ / books. google. com/books?id=a1wTJR3kHwUC& dq), (1902) The Princeton University Library. (A translation of Gauss's originalpaper.)
Teorema de la base de Hilbert 99
Teorema de la base de HilbertEn Matemáticas, el teorema fundamental de Hilbert o teorema fundamental de Hilbert toma su nombre deDavid Hilbert que fue el primero en probarlo en 1888.Sea un anillo conmutativo con 1 (puede ser 1=0, entonces ). Se dice que es noetheriano si todo idealde está finitamente generado. Es fácil probar que son equivalentes:1. es noetheriano.2. Todo conjunto no vacío de ideales de admite un elemento maximal3. cumple la condición de cadena ascendente (ACC o CCA):Si
es una cadena de ideales, entonces existe tal que
.
Teorema fundamental de HilbertSi es noetheriano, entonces es noetheriano.
Teorema de torsión de MazurEl teorema de Mazur afirma que si es una curva elíptica no singular y tenemos un punto de orden
finito, entonces o . Es más, el conjunto de los puntos de orden finito forma unsubgrupo de de una de las dos formas siguientes:• Un grupo cíclico de orden o .• El producto de un grupo cíclico de orden 2 y un grupo cíclico de orden con .

Teorema de Nagell-Lutz 100
Teorema de Nagell-LutzEl teorema de Nagell-Lutz afirma que si un curva elíptica nosingular, con coeficientes enteros, y sea , entonces unpunto de orden finito cumple que , en cuyo caso el orden del punto es 2, o .
Conjetura de HodgeLa conjetura de Hodge es un importante problema de geometría algebraica todavía no resuelto en el que serelacionan la topología algebraica de una variedad algebraica compleja no singular y las subvariedades de esavariedad. En concreto, la conjetura dice que ciertos grupos de cohomología de De Rham son algebraicos, esto es, sonsumas de dualidades de Poincaré de clases homólogas de subvariedades.La conjetura de Hodge es uno de los Problemas del milenio del Clay Mathematics Institute, por lo que hay un premiode US$1,000,000 por demostrarla.
MotivaciónSea X una variedad compleja conexa de dimensión compleja n. Luego X es una variedad diferenciable orientable dedimensión 2n, por lo que sus grupos de cohomología residen en grados cero a través de 2n. Asúmase que X es unavariedad de Kähler, por lo que hay una descomposición en su cohomología con coeficientes complejos:
donde es el subgrupo de grupos de cohomología que están representados por formas armónicas de tipo(p, q). Esto es, estas son los grupos de cohomología representados por formas diferenciales que, en una determinadaopción de coordenadas locales , puede ser escritas como tiempos de funciones armónicas
. (Véase Teoría de Hodge para más detalles). Tomar productos exterioresde estos representantes armónicos se corresponde con el cup product en cohomología, por lo que cup product escompatible con la descomposición de Hodge:
Dado que X es una variedad compleja, X tiene una clase fundamental.Sea Z una subvariedad compleja de X de dimensión k, y sea i : Z → X la función de inclusión. Elíjase una formadiferenciada del tipo (p, q). Podemos integrar sobre Z:
Para evaluar esta integral, elíjase un punto de Z y llámesele 0. Alrededor de 0, podemos elegir coordinadas localesen X tal que Z sea . si p > k, entonces debe contener algún donde
tienda a a cero en Z. Lo mismo es cierto si q > k. Consecuentemente, esta integral es cero si (p, q) ≠ (k, k).De forma más abstracta, la integral puede ser escrita como el cap product del grupo de cohomología de Z y del grupode cohomología representado por . Según la dualidad de Poincaré, el grupo de homología de Z es doble del grupode cohomología que llamaremos [Z], y el cap product puede ser calculado tomando el cup product de [Z] y ycapping con la clase fundamental de X. Dado que [Z] es un grupo de cohomología, tiene descomposición de Hodge.Según el cálculo anterior, si nosotros cup este grupo con otro tipo de grupo (p, q) ≠ (k, k), entonces tendremos cero.Dado que , se concluye que [Z] debe quedar en . En pocaspalabras, la conjetura de Hodge dice:

Conjetura de Hodge 101
¿Qué grupos de cohomología en derivan de subvariedades complejas Z?
Referencias• Hodge, W. V. D. "The topological invariants of algebraic varieties". Proceedings of the International Congress of
Mathematicians, Cambridge, MA, 1950, vol. 1, pp. 181–192.• Grothendieck, A. "Hodge's general conjecture is false for trivial reasons". Topology 8 1969, pp. 299–303.
Enlaces externos• Descripción oficial del problema en la página del Clay Math Institute (pdf) [1]
• Charla de Dan Freed (Universidad de Texas) sobre la conjetura de Hodge (Real Video) [2] (Slides) [3]
• K. H. Kim, F. W. Roush. Contraejemplo de la conjetura de Hodge [4]
• Indranil Biswas. La conjetura de Hodge para variedades generales de Prym (pdf) [5]
Referencias[1] http:/ / www. claymath. org/ millennium/ Hodge_Conjecture/ Official_Problem_Description. pdf[2] http:/ / claymath. msri. org/ hodgeconjecture. mov[3] http:/ / www. ma. utexas. edu/ users/ dafr/ HodgeConjecture/ netscape_noframes. html[4] http:/ / arxiv. org/ abs/ math/ 0608265[5] http:/ / www. imsc. res. in/ ~kapil/ isw/ isw. pdf
Geometría algebraicaLa geometría algebraica es una rama de la matemática que, como sugiere su nombre, combina el álgebra abstracta,especialmente el álgebra conmutativa, con la geometría analítica. Se puede comprender como el estudio de losconjunto de soluciones de los sistemas de ecuaciones algebraicas. Cuando hay más de una variable, aparecen lasconsideraciones geométricas que son importantes para entender el fenómeno. Podemos decir que la materia encuestión comienza cuando abandonamos la mera solución de ecuaciones, y el tema de "entender" todas lassoluciones se vuelve tan importante como el de encontrar alguna solución, lo cual lleva a las "aguas más profundas"del mundo de la matemática, tanto conceptual como técnicamente.
Ceros de polinomios simultáneosEn la geometría algebraica clásica, el principal objeto de interés son los conjuntos donde se anula cierta colección depolinomios, lo que quiere decir, el conjunto de todos los puntos que satisfacen simultáneamente una o másecuaciones polinomiales. Por ejemplo, la esfera de dos dimensiones en el espacio euclídeo de tres dimensiones R³ sepuede definir como el conjunto de todos los puntos (x, y, z) tales que
Un círculo "inclinado" en R³ puede definirse como el conjunto de todos los puntos (x, y, z) que satisfacen las dosecuaciones polinomiales siguientes
Geometría algebraica 102
Variedades afinesComenzamos en primer lugar con un cuerpo k. En geometría algebraica clásica, este cuerpo fue siempre C, losnúmeros complejos, pero muchos de los resultados son también ciertos si sólo asumimos que k es algebraicamentecerrado. Definimos , llamado n-espacio afín sobre k, como kn. Esto puede parecer una notación inútil, pero supropósito es olvidar la estructura vectorial que porta kn. Abstractamente hablando, es, de momento, solamenteuna colección de puntos.Por tanto, en adelante eliminaremos la k en y escribiremos .
Diremos que una función es regular si puede escribirse mediante un polinomio, esto es, si existe unpolinomio p sobre k [x1,...,xn] tal que para cada punto (t1,...,tn) de , f(t1,...,tn)=p(t1,...,tn). Las funciones regularessobre el n-espacio afín son de esta manera lo mismo que los polinomios sobre k en n variables. Escribiremos lasfunciones regulares sobre como .Diremos que un polinomio se anula en un punto si al evaluarlo en él el resultado es cero. Sea S un conjunto depolinomios en . El conjunto anulador de S (o locus anulador) es el conjunto V(S) de todos los puntos en donde cada polinomio de S se anule. En otras palabras,
Un subconjunto de que es un V(S) para algún S se llama conjunto algebraico afin. La V se refiere a la inicialde variedad. En muchos textos no existe diferencia entre variedad algebraica afin y conjunto algebraico afin, sinembargo es usual referirse a V(S) como variedad algebraica afin cuando no se puede expresar como unión de dossubconjuntos algebraicos afines propios (contenidos en el sentido estricto). En cualquier caso, esta última definicióncoincide con la de conjunto algebraico afin irreducible. De forma que, en determinados textos, las nociones devariedad e irreducibilidad son equivalentes.Dado un conjunto V de del que sepamos que es una variedad, sería deseable determinar el conjunto depolinomios que lo genera, aunque haremos una definición para un caso más general: si V es cualquier subconjuntode (no necesariamente una variedad), definimos I(V) como el conjunto de todos los polinomios cuyo conjuntoanulador contiene a V. La I esta vez es por Ideal: si tengo dos polinomios f y g y los dos se anulan en V, entonces f+gtambién se anula en V, y si h es cualquier polinomio, entonces hf se anula en V, así que I(V) es siempre un ideal de
.Dos cuestiones que se plantean ahora son: si tenemos un subconjunto V de , ¿cuándo es V=V(I(V))? Y, sitenemos un conjunto de polinomios, S, ¿cuándo es S=I(V(S))? La respuesta a la primera cuestión la provee laintroducción de la topología de Zariski, una topología en que refleja directamente la estructura algebraica de
. Entonces V=V(I(V)) si y sólo si V es un conjunto Zariski-cerrado. La respuesta a la segunda cuestión vienedada por la Hilbert Nullstellensatz. En una de sus formas, dice que S=I(V(S)) es el ideal radical del ideal generadopor S.Por varias razones no siempre queremos trabajar con todo el ideal correspondiente a un conjunto algebraico V. Elteorema de la base de Hilbert implica que los ideales en siempre se generan finitamente.Entonces se tiene que un conjunto algebraico es una irreducible (o en algunos casos simplemente variedad) si y sólosi los polinomios que lo definen generan un ideal primo del anillo de polinomios.
Geometría algebraica 103
Funciones regularesAl igual que las funciones continuas son las aplicaciones naturales en los espacios topológicos y las funciones suavesson las aplicaciones (morfismos) naturales en las variedades diferenciables, existe una clase natural de funcionessobre un conjunto algebraico, llamadas regulares. Una función regular sobre un conjunto algebraico V contenido en
está definida como la restricción de una función regular en , en el sentido definido arriba.Puede parecer antinaturalmente restrictivo el requerir que una función regular siempre se extienda al espacioambiente, pero esta situación es muy similar a la que se da en un espacio topológico normal, donde el teorema deextensión de Tietze garantiza que una función continua en un subconjunto cerrado siempre puede extenderse alespacio topológico ambiente.Al igual que las funciones regulares en un espacio afín, las funciones regulares en V forman un anillo, quedenotamos como k[V]. A este anillo se le llama el anillo coordenado de V.Ya que las funciones regulares en V provienen de las funciones regulares en , debería haber una relación entresus anillos coordenados. Específicamente, cogiendo una función de k[V] lo estamos haciendo en , y dijimosque era la misma que otra función si daban los mismos valores cuando las evaluávamos en V. Esto es lo mismo quedecir que su diferencia es cero en V. De esto podemos ver que k[V] es el cociente .
La categoría de las variedades afinesUsando las funciones regulares desde una variedad afín a , podemos definir las funciones regulares de unavariedad afín a otra. Primero definiremos una función regular de una variedad a un espacio afín: sea V una variedadcontenida en . Elige m funciones regulares en V, y llámalas f1,...,fm. Definimos una función regular f de V a
mediante f(t1,...,tn)=(f1,...,fm). En otras palabras, cada fi determina una coordenada del rango de f.Si V es una variedad contenida en , decimos que f es una función regular de V a V' si el rango de f estácontenido en V.Esto convierte a la colección de todas las variedades afines en una categoría, cuyos objetos son variedades afines ycuyos morfismos son las aplicaciones regulares. El teorema siguiente caracteriza esta categoría:
La categoría de variedades afines es la dual de la categoría de las k-álgebras reducidas y finitamentegeneradas, y sus homomorfismos.
Espacio proyectivoConsidérese la variedad V(y=x²). Si la dibujamos en un sistema de coordenadas cartesianas obtenemos una parábola.Según x crece, vemos que la pendiente de la línea que va desde el origen hasta el punto (x, x²) se hace más y másgrande. Según x decrece, la pendiente de la misma se hace más y más pequeña.Comparemos esto con la variedad V(y=x³). Ésta es una ecuación cúbica. Según x crece, la pendiente de la líneadesde el origen hasta el punto (x, x³) se hace mayor, como antes. Pero, al contrario que en la anterior, según xdecrece, la pendiente de la misma línea se hace mayor. Así que el comportamiento "al infinito" de V(y=x³) esdiferente del de V(y=x²). Sin embargo, es difícil dar sentido al concepto de "al infinito", si nos restringimos alespacio afín.El remedio a esto es trabajar en el espacio proyectivo, que tiene propiedades análogas a las de un espacio deHausdorff compacto. Entre otras cosas, nos permite hacer precisa la noción de "al infinito" mediante la inclusión depuntos extra. El comportamiento de una variedad en aquellos puntos extra nos da más información sobre ella. Y seve que V(y=x³) tiene una singularidad en uno de aquellos puntos extra, pero V(y=x²) es suave.Los primeros geómetras algebraicos se dieron cuenta rápidamente de que el espacio proyectivo tiene propiedades mucho mejores que el afín ordinario. Por ejemplo, el Teorema de Bézout sobre el número de puntos de intersección entre dos variedades puede ser mostrado en su forma más afilada sólo en el espacio proyectivo. Por esta razón, este
Geometría algebraica 104
espacio tiene un papel fundamental en la geometría algebraica.
El punto de vista modernoEl estudio moderno de la geometría algebraica redefine los objetos básicos de su estudio. Las variedades quedansubsumidas en el concepto de esquema, de Alexander Grothendieck. Éste viene de la observación de que si lask-álgebras reducidas finitamente generadas son objetos geométricos, entonces quizás cualquier anillo conmutativopodría serlo. Como se comprueba así, éste es un nuevo punto de vista muy fructífero, y es la base para toda lainvestigación moderna en geometría algebraica.
Notas e historiaUna clase importante de variedades son las variedades abelianas, que son aquellas cuyos puntos forman un grupo.Los ejemplos prototípicos son las curvas elípticas, que fueron un instrumento fundamental para la prueba del últimoteorema de Fermat y se usan también en criptografía de curvas elípticas.Mientras que mucha de la geometría algebraica trata de proposiciones abstractas y generales sobre variedades,también se han desarrollado los métodos para la computación efectiva con polinomios concretos dados. La técnicamás importante es la de las bases de Gröbner, que se emplea en todos los sistemas de álgebra computacional.La geometría algebraica fue desarrollada enormemente por los geómetras italianos a principios del siglo XX.Enriques clasificó las superficies algebraicas salvo isomorfismo biracional. El estilo de este grupo de matemáticosfue muy intuitivo y no tenía el rigor moderno.Sobre los años 1930 y 1940, Oscar Zariski, André Weil y otros se dieron cuenta de que esta disciplina necesitabarefundarse mediante el álgebra conmutativa. El álgebra conmutativa (como el estudio de los anillos conmutativos ysus ideales) había sido y fue desarrollada por David Hilbert, Max Noether, Emanuel Lasker, Emmy Noether,Wolfgang Krull y otros. Antes de ellos no existían fundamentos estándar para la geometría algebraica.En los años 1950 y 1960, Jean-Pierre Serre y Alexander Grothendieck rehicieron la fundamentación haciendo uso dela teoría de haces. Más tarde, alrededor de 1960, se desarrolló la idea de los esquemas, conjuntamente con el refinadoaparato del álgebra homológica. Tras una década de rápido desarrollo, el campo se estabilizó en los años 1970, ysurgieron aplicaciones en la teoría de números y en las más clásicas cuestiones geométricas de variedadesalgebraicas, singularidades y módulos.
Referencias externasUn libro clásico, con el lenguaje de esquemas:• Hodge, W. V. D., and Pedoe, Daniel, Methods of Algebraic Geometry: Volume 1, Cambridge University Press,
1994, ISBN 0-521-46900-7• Hodge, W. V. D., and Pedoe, Daniel, Methods of Algebraic Geometry: Volume 2, Cambridge University Press,
1994, ISBN 0-521-46901-5• Hodge, W. V. D., and Pedoe, Daniel, Methods of Algebraic Geometry: Volume 3, Cambridge University Press,
1994, ISBN 0-521-46775-6Textos modernos sin el lenguaje de esquemas:• Griffiths, Phillip, and Harris, Joe, Principles of Algebraic Geometry, Wiley-Interscience, 1994, ISBN
0-471-05059-8• Harris, Joe, Algebraic Geometry: A First Course, Springer-Verlag, 1995, ISBN 0-387-97716-3• Mumford, David, Algebraic Geometry I: Complex Projective Varieties, 2nd ed., Springer-Verlag, 1995, ISBN
3-540-58657-1• Reid, Miles, Undergraduate Algebraic Geometry, Cambridge University Press, 1988, ISBN 0-521-35662-8
Geometría algebraica 105
• Shafarevich, Igor, Basic Algebraic Geometry I: Varieties in Projective Space, Springer-Verlag, 2nd ed., 1995,ISBN 0-387-54812-2
Libros y referencias para los esquemas:• Eisenbud, David, and Harris, Joe, The Geometry of Schemes, Springer-Verlag, 1998, ISBN 0-387-98637-5• Grothendieck, Alexander, Éléments de géométrie algébrique, Publications mathématiques de l'IHÉS, vols. 4, 8,
11, 17, 20, 24, 28, 32, 1960, 1961, 1963, 1964, 1965, 1966, 1967• Grothendieck, Alexander, Éléments de géométrie algébrique, vol. 1, 2nd ed., Springer-Verlag, 1971, ISBN
3-540-05113-9• Hartshorne, Robin, Algebraic Geometry, Springer-Verlag, 1997, ISBN 0-387-90244-9• Mumford, David, The Red Book of Varieties and Schemes: Includes the Michigan Lectures (1974) on Curves and
Their Jacobians, 2nd ed., Springer-Verlag, 1999, ISBN 3-540-63293-X• Shafarevich, Igor, Basic Algebraic Geometry II: Schemes and Complex Manifolds, Springer-Verlag, 2nd ed.,
1995, ISBN 0-387-54812-2En Internet:• Kevin R. Coombes: Algebraic Geometry: A Total Hypertext Online System [1]
• Algebraic geometry [2] entry on PlanetMath [3]
Enlaces externos• Wikimedia Commons alberga contenido multimedia sobre Geometría algebraica. Commons
Referencias[1] http:/ / odin. mdacc. tmc. edu/ ~krc/ agathos/[2] http:/ / planetmath. org/ encyclopedia/ AlgebraicGeometry. html[3] http:/ / planetmath. org/

Variedad algebraica 106
Variedad algebraicaEn geometría algebraica, una variedad algebraica es esencialmente un conjunto de puntos (finito o infinito) en loscuales un polinomio (de una o más variables) toma un valor cero, o en el cual un conjunto de tales polinomios tomaun valor cero. Las variedades algebraicas son uno de los objetos centrales de estudio de la geometría algebraicaclásica (y en ciertos aspectos moderna).Desde un punto de vista histórico, el teorema fundamental del álgebra estableció la relación entre el álgebra y lageometría al indicar que un polinomio de una variable en los números complejos queda determinado por su conjuntode raíces, que es un objeto geométrico inherente. Construyendo sobre este resultado, el Nullstellensatz de Hilbertestablece una correspondencia fundamental entre los ideales de los anillos de polinomios y los subconjuntos delespacio afín. Utilizando el Nullstellensatz y sus resultados asociados, es posible capturar la noción geométrica de unavariedad en términos algebraicos como también hacer que la geometría entienda sobre temas de la teoría de anillos.
DefiniciónSea un cuerpo. Sea el anillo de polinomios en las variables y coeficientes en el cuerpo .Sea . Se define la variedad afín determinada por (denotada por ) al conjunto:
.Es decir, V(S) representa el conjunto de puntos del espacio afín en los que se anulan todos los polinomios de .
Referencias• Robin Hartshorne (1977). Algebraic Geometry. Springer-Verlag. ISBN 0-387-90244-9.• David Cox; John Little, Don O'Shea (1997). Ideals, Varieties, and Algorithms (second edition edición).
Springer-Verlag. ISBN 0-387-94680-2.• David Eisenbud (1999). Commutative Algebra with a View Toward Algebraic Geometry. Springer-Verlag. ISBN
0-387-94269-6.• David Dummit; Richard Foote (2003). Abstract Algebra (third edition edición). Wiley. ISBN 0-471-43334-9.• Rowland, Todd y Weisstein, Eric W. (2005). «Affine variety [1]». Consultado el 30 de Junio de 2008.
Referencias[1] http:/ / mathworld. wolfram. com/ AffineVariety. html

Dualidad de Poincaré 107
Dualidad de PoincaréEn matemáticas, el teorema de la dualidad de Poincaré es un resultado básico en la estructura de los grupos dehomología y de cohomología de variedades. Afirma que si M es una variedad orientada compacta n-dimensional,entonces el k-ésimo grupo de cohomología de M es isomorfo al (n-k)-ésimo grupo de homología de M, para todos losnúmeros enteros k. Establece, además, que si se utilizan la homología y la cohomología mod 2, entonces la asunciónde orientabilidad puede ser omitida.
HistoriaUna forma de la dualidad de Poincaré fue establecida primero, sin prueba, por Henri Poincaré en 1893. Fueestablecida en términos de los números de Betti: El k-ésimo y (n-k)-ésimo números de Betti de una variedadorientable cerrada (es decir compacta y sin borde) son iguales. El concepto de cohomología estaba en aquella épocaa más de 40 años de ser clarificado. En su 'documento' de 1895, Análisis Situs, Poincaré intentó probar el teoremausando la teoría topológica de la intersección, que él había inventado. La crítica de su trabajo por Poul Heegaard locondujo a captar que su prueba estaba seriamente incompleta. En los primeros dos complementos al Análisis Situs,Poincaré dio una nueva prueba en términos de triangulaciones duales.La dualidad de Poincaré no adquirió su forma moderna hasta el advenimiento de la cohomología en los años 30,cuando Eduard Cech y Hassler Whitney inventaron los productos cup & cap (capa y copa) y formularon la dualidadde Poincaré en estos nuevos términos.
Estructuras celulares dualesLa dualidad de Poincaré clásica fue pensada en términos de las triangulaciones duales, que son generalizaciones depoliedros duales. Dada una triangulación X una variedad n-dimensional M, uno substituye cada k- simplex con una(n-k)-célula para producir una nueva descomposición Y de M. Si cada (n-k)-célula es efectivamente un simplexentonces se dice que Y es la triangulación dual de X. Considerando un tetraedro como triangulación de la 2-esfera, latriangulación dual del tetraedro es otro tetraedro. Esta construcción no necesariamente da otra triangulación, comomuestran los ejemplos del octaedro y del icosaedro. Poincaré utilizó un método (no enteramente correcto) queimplicaba subdivisión baricéntrica para demostrar que podemos obtener siempre una triangulación dual para lasvariedades orientadas compactas.En términos más exactos, se puede describir el dual de una triangulación X como una triangulación Y tal que dado unk-simplex α en X, hay un (n-k)-simplex en Y cuyo número de intersección con α es 1, y tal que el número deintersección de α con cualquier otro (n -k)-simplex de Y es 0.El operador de borde en un complejo de cadena puede ser visto como una matriz. Sea M una n-variedad cerrada, Xuna triangulación de M, y Y la triangulación dual de X. Entonces se puede demostrar que el operador de borde
es el traspuesto del operador de borde
Usando el hecho de que los grupos de homología de una variedad son independientes de la triangulación que loscomputa, se puede demostrar fácilmente que los k-ésimo y (n-k)-ésimo números de Betti de M son iguales.
Dualidad de Poincaré 108
Formulación modernaLa presentación moderna del teorema de dualidad de Poincaré es en términos de la homología y de la cohomología:si M es una n-variedad cerrada orientada, y k es un número entero, entonces hay un isomorfismo canónico definidodel k-ésimo grupo de homología Hk(M) al (n-k)-ésimo grupo de cohomología Hn-k(M). (aquí, la homología y lacohomología se toman con coeficientes en el anillo de los números enteros, pero el isomorfismo se sostiene paracualquier anillo de coeficientes.) Específicamente, se mapea un elemento de Hk(M) a su producto cap con una clasefundamental de M, que existirá para M orientado.Se definen a los grupos de homología y cohomología como cero para los grados negativos, así que la dualidad dePoincaré en particular implica que los grupos de homología y cohomología de las n-variedades cerradas orientables -son cero para los grados mayores que n.
NaturalidadObsérvese que Hk es un funtor contravariante mientras que el Hn-k es covariante. La familia de isomorfismos
DM: Hk (M) → Hn-k(M)es natural en el sentido siguiente: si
f: M → Nes una función continua entre dos n- variedades orientadas que sea compatible con la orientación, es decir que mapeala clase fundamental de M a la clase fundamental de N, entonces
DN = f* DM f*,donde f * y f* son las funciones inducidas por f en homología y cohomología, respectivamente.
Generalizaciones y resultados relacionadosEl teorema de dualidad de Poincaré-Lefschetz es un generalización para las variedades con borde. En el casono-orientable, considerando el haz de orientaciones locales, se puede dar una presentación que sea independiente dela orientabilidad.Con el desarrollo de la teoría de homología al incluir K-teoría y otras teorías extraordinarias a partir de 1955, seobservó que la homología H* podría ser substituida por otras teorías, una vez que los productos de variedades fueranconstruidos; y ahora hay tratamientos de libro de texto con toda generalidad.Hay muchas otras formas de dualidad geométrica en topología algebraica, incluyendo la dualidad de Lefschetz, ladualidad de Alexander y la S-dualidad (teoría homotópica).
Cohomología de De Rham 109
Cohomología de De RhamEn geometría diferencial, las formas diferenciales en la variedad diferenciable que son derivadas exteriores se llamanexactas; y las formas tales que sus derivadas exteriores son 0 se llaman cerradas (véase formas diferencialescerradas y exactas).Las formas exactas son cerradas, así que los espacios vectoriales de k-formas junto con la derivada exterior son uncomplejo de cocadenas. Los espacios vectoriales de las formas cerradas módulo las formas exactas se llaman losgrupos de cohomología de De Rham. El producto cuña dota a la suma directa de estos grupos con una estructura deanillo.El teorema de De Rham, probado por Georges de Rham en 1931, establece que para una variedad diferenciablecompacta orientable M, estos grupos son isomorfos como espacios vectoriales reales con los grupos de cohomologíasingular Hp(M; R). Además, los dos anillos de cohomología son isomorfos (como anillo graduado). El teorema deStokes generalizado es una expresión de la dualidad entre la cohomología de de Rham y la homología de cadenascomplejas.
Formas armónicasPara la variedad diferenciable M, podemos equiparla con alguna métrica de Riemann auxiliar. Entonces el laplacianoΔ, definido por
*d*d + d*d*
usando la derivada exterior y el dual de Hodge define un operador diferencial lineal homogéneo (en graduación) queactúa sobre el álgebra exterior formada por las formas diferenciales: podemos mirar su acción en cada componentede grado p por separado.Si M es compacto y orientado, la dimensión de su núcleo que actúa sobre el espacio de p-formas es entonces igual(por la teoría de Hodge) a la del grupo de cohomología de de Rham de grado p: el laplaciano selecciona una formaarmónica única en cada clase de cohomología de formas cerradas, en particular el espacio de todo las formasp-armónicas en M es isomorfo a Hp (M; R).
ReferenciasFrank Warner, Foundations of differentiable manifolds and Lie groups, Springer-Verlag, 1983
Variedad de Kähler 110
Variedad de KählerEn matemáticas, una variedad de Kähler es una variedad con estructura unitaria a ( -estructura) quesatisface una condición de integración. En particular, es una variedad compleja, una variedad de Riemann, y unavariedad simpléctica, con estas tres estructuras compatibles entre sí.Esta estructura triple corresponde a la presentación del grupo unitario como una intersección:
Sin ninguna condición de integración, la noción análoga es una variedad hermítica parcial. Si la estructura-Sp esintegrable (sin que la estructura compleja lo sea), la noción es una variedad de Kähler parcial; si la estructuracompleja es integrable (sin que la estructura-Sp lo sea), la noción es una variedad hermítica.Las variedades de Kähler (en inglés "Kähler manifolds") fueron llamadas así en honor al matemático Erich Kähler yson importantes en la geometría algebraica: ellas son una generalización de la geometría diferencial de variedadesalgebraicas complejas.
DefiniciónLas variedades de Kähler pueden ser caracterizados en muchas maneras: ellas son usualmente definidas como unavariedad compleja con una estructura adicional (o una variedad simpléctica con una estructura adicional, o unavariedad de Riemann con una estructura adicional).
Uno puede resumir la conexión entre las tres estructuras vía , donde h es la forma hermítica, es lamétrica de Riemann, es la estructura compleja parcial, y la estructura simpléctica parcial.La métrica de Kähler en una variedad compleja M es una métrica hermítica en el fibrado tangente complexificado
que satisface la condición de tener varias caracterizaciones equivalentes (siendo la más geométrica eltransporte paralelo inducido por la métrica que da lugar a funciones complejo-lineales en los espacios tangentes). Entérminos de coordenadas locales se especifica de este modo: si.
es métrica hermítica, entonces la forma de Kähler asociada (definida salvo un factor de ) por
es cerrada: es decir, . Si lleva tal métrica se llama una variedad de Kähler.La métrica en la variedad de Kähler satisface localmente
para alguna función , llamado "el potencial de Kähler".Una variedad de Kähler, la forma asociada de la métrica de Kähler es llamada Kähler-Einstein (o algunas vecesEinstein-Kähler) si su tensor de curvatura Ricci es proporcional al tensor métrico, , por alguna constante
. Este nombre es un recordatorio de las consideraciones de Einstein sobre la constante cosmológica. Ver elartículo variedad de Einstein para más detalles.
Variedad de Kähler 111
Ejemplos• El espacio euclidiano complejo con la métrica hermítica estándar es una variedad de Kähler.
• Un toro complejo, dado por para una cierta red , forma una variedad compacta de Kähler con lamétrica natural.
• Cada superficie de Riemann es una variedad de Kähler, puesto que la condición para que sea cerrado es trivialen 2 dimensiones (reales).
• El espacio proyectivo complejo tiene un métrica de Kähler natural llamada métrica de Fubini-Study.Esencialmente está determinada por la condición que sea invariante bajo la acción del grupo unitario (de unadimensión más grande, actuando en el espacio vectorial complejo que da lugar al espacio proyectivo).
• Cualquier subvariedad compleja de una variedad de Kähler es Kähler. En particular, cualquier variedad complejaque se pueda encajar en o es Kähler.
• Las propiedades de la restricción de la métrica de Fubini-Study significa que las variedades algebraicas complejasproyectivas no singulares llevan métricas de Kähler. Esto es fundamental en su teoría analítica.
Una subclase importante de las variedades de Kähler son las variedades de Calabi-Yau.
Referencias• André Weil, Introduction à l'étude des variétés kählériennes (1958)• Alan Huckleberry and Tilman Wurzbacher, eds. Infinite Dimensional Kähler Manifolds (2001), Birkhauser
Verlag, Basel ISBN 3-7643-6602-8.• Andrei Moroianu, Lectures on Kähler Geometry (2007), London Mathematical Society Student Texts 69,
Cambridge ISBN 978-0-521-68897-0.
Variedad diferenciableEn Geometría y Topología, una variedad diferenciable es un tipo especial de variedad topológica, a la que podemosextender las nociones de cálculo diferencial que normalmente usamos en . En una variedad diferenciable Mpodremos definir lo que es una función diferenciable , y campos de tensores diferenciables (incluidoscampos de vectores). El estudio del cálculo en variedades diferenciables se conoce como geometría diferencial.
IntroducciónPara un desarrollo informal del tema
Generalización de los conceptos de curva y superficieUna variedad diferenciable representa una generalización, en dos aspectos básicos, del concepto de superficiediferenciable:• Supone la generalización a cualquier número de dimensiones. En dimensión 1, una variedad es una curva. En
dimensión 2, una superficie sería un ejemplo de variedad.• Supone otra generalización al intentar definir una variedad de modo intrínseco. Por ejemplo, una curva o una
superficie suelen describirse embebidas en un espacio ambiente R³, pero podrían describirse sin hacer alusión a él.Es más, existen casos de variedades de dimensión 2 que no podrán verse embebidas en un espacio euclídeo dedimensión 3 (pero sí de dimensión superior).
Antes de hacer la segunda generalización, podríamos pensar que una variedad es diferenciable, informalmente hablando, si cada uno de sus puntos tiene espacio tangente, es decir, no tiene "picos" ni "filos". Pero para hacer una
Variedad diferenciable 112
definición formal necesitaremos que esta no haga alusión a un posible embebimiento de la variedad en un espacioambiente.
Un poco de historiaRiemann, en el siglo XIX, observó la importancia de definir la noción de variedad de un modo intrínseco, sinrequerir que el espacio topológico subyacente estuviera embebido en un espacio afín. La definición formal precisafue introducida por primera vez por Hermann Weyl en 1913.Las variedades diferenciables aparecen en diversos campos de la Física:• En Relatividad general, el espacio (de dimensión 3) y el tiempo forman una variedad de dimensión 4 llamada
espacio-tiempo.• Muchas teorías modernas, como la Teoría de cuerdas, operan en una variedad de dimensión mayor que 4.• En mecánica clásica, para describir la situación de un sólido rígido en el espacio se necesitan 6 parámetros (3 que
describan la posición de su centro de masas y otros 3 que corresponden a los grados de libertad rotacional). Unasituación concreta de un sólido quedará descrita como un punto en una variedad diferenciable de dimensión 6, quese denomina espacio de configuración del sólido rígido.
Conceptos previos de variedades topológicasRecordemos los conceptos de variedad topológica y de cartas:• Una variedad topológica de dimensión es un espacio topológico (que suele suponerse Hausdorff y
ANII) en el que para cada existe un entorno abierto homeomorfo a un abierto de mediante .
• Un par bajo estas condiciones se denomina carta o sistema coordenado sobre para , y laaplicación se denomina aplicación coordenada para .
• Cada aplicación coordenada se podrá desglosar como un conjunto de n funciones coordenadas : enefecto, si para cada convenimos en representar por a la función quea cada le hace corresponder (es decir, la -ésima coordenada de ),denominaremos a la aplicación como la función coordenada para .
Podríamos cuestionarnos cómo sería posible determinar si una función definida en una variedadtopológica es una función diferenciable. Aparentemente bastaría exigir que , su expresión en un entornocoordenado sea diferenciable. Pero esta condición no sería consistente si realizamos un cambio de carta. En efecto, siobservamos su expresión en otra carta:
,necesitaremos para mantener la consistencia que el cambio de cartas representado por el último paréntesis seadiferenciable. Esta exigencia es la base de la definición de estructura diferenciable.
Variedad diferenciable 113
Definición
Estructura diferenciable
Dada una variedad topológica y un número entero , una estructura diferenciable (o atlas maximal) de clase sobre es una familia de sistemas coordenados sobre de manera que secumpla que:
1. recubre M, es decir, ,
2. dados dos cualesquiera ha de ocurrir que la aplicación , llamada cambio de cartas sea
diferenciable de orden .3. es maximal (relativo al orden dado por la inclusión de conjuntos) entre todas las familias de entornos
coordenados sobre bajo las condiciones 1 y 2.
Variedad diferenciable
Se dice que el par formado por la variedad topológica M de dimensión n y por la estructura diferenciable Fde clase r es una variedad diferenciable de dimensión y clase .Hay una cierta confusión sobre la terminología variedad diferenciable (sin más especificaciones) y variedad suave.En cualquier caso, para evitar confusiones, todos los textos indican qué entienden por variedad diferenciable.
Subvariedad diferenciableEs cualquier subconjunto de una variedad diferenciable que mediante la topología inducida de la variedad originalsigue teniendo estructura de variedad diferenble. En general las subvariedades diferenciables son los subconjuntos depuntos para los cuales es posible definir localmente una función diferenciable f que satisfaga:
Los conjuntos no suaves, o que satisfaendo una ecuación similar a la anterior pero donde f no fuera diferenciable engeneral no constituyen subvariedades diferenciables.
Cálculo en variedades
Aspectos que se generalizanMuchas de las técnicas del cálculo multivariable son aplicables mutatis mutandis en variedades diferenciables.Podemos definir la derivada direccional de una función diferenciable en la dirección marcada por un vector tangentea la variedad. Dicha derivada se comportará de modo similar al de la derivada ordinaria de una función definida en elespacio euclídeo, al menos localmente: habrá versiones del teorema de la función implícita y de función inversa.Sin embargo, la derivada direccional de un campo de vectores no estará definida de forma directa. Existen variasgeneralizaciones que captan ciertas características formales de la derivación en espacios euclídeos. Las principalesson:• La derivada de Lie, que queda definida de forma única por la estructura diferenciable, pero deja de satisfacer
alguna de las propiedades de la derivada direccional.• Una conexión afín que no está definida de forma única, por lo que debe ser especificada como un dato añadido a
la variedad. Presenta una generalización más completa de las características de la derivada direccional ordinaria.Las ideas del cálculo integral también pueden extenderse a las variedades diferenciables. Encontrarán su expresiónnatural en el lenguaje del cálculo exterior con formas diferenciables. Teoremas fundamentales del cálculo integral envarias variables, en particular el teorema de Green, el de la divergencia y el de Stokes se generalizan en un soloteorema llamado teorema de Stokes.

Variedad diferenciable 114
Vectores tangentes en un puntoEn una variedad abstracta, al no considerarse embebida en ningún espacio ambiente, no podremos visualizar elespacio tangente como un subespacio afín del ambiente. La generalización del concepto de espacio tangenterequerirá concebir los vectores tangentes como operadores que representan una derivada direccional.
En podemos visualizar un vector como un operador que actúasobre una función diferenciable en un entorno cualquiera de p, y nos devuelve su derivada en ladirección marcada por :
En los años 1960 surge la definición axiomática de vector tangente en un punto de una variedad, comogeneralización de lo anterior. Un vector tangente a una variedad será un operador quesatisfaga:1. la condición de linealidad: 2. la regla de Leibniz: .El conjunto de vectores tangentes en un punto forman un espacio vectorial de la misma dimensión que la variedadllamado espacio tangente en p y notado como . En principio, espacios tangentes en puntos distintos no soncomparables. Pero podemos formar con ellos una variedad de dimensión el doble de la dimensión de M, que sellamará fibrado tangente y se notará como TM. Como conjunto,
Aplicaciones diferenciablesUna aplicación se dirá diferenciable si su expresión en cartas lo es. Formalmente, F esdiferenciable si para todo punto p de M podemos encontrar una carta de M que lo contenga y una carta
de N que contenga a F(p) tales que sea diferenciable.Una aplicación diferenciable induce un homomorfismo de espacios vectoriales entre losespacios tangentes respectivos. Al igual que en el cálculo diferencial ordinario, podremos aproximar un objetodiferenciable (F) por un objeto lineal ( ).
Relación con variedades topológicasDada una variedad topológica, nos podemos preguntar si admitirá siempre una estructura diferenciable o sidicha estructura será única. En primer lugar, según un teorema debido a Whitney, en cualquier variedad con unaestructura con k>0, hay una única estructura C∞ compatible con la anterior.La existencia y unicidad está garantizada en dimensiones menores que 4:•• Toda variedad topológica de dimensión 1, 2, o 3 tiene una única estructura diferenciable (salvo difeomorfismos).La situación es diferente en dimensión superior:• Se conocen ejemplos de variedades topológicas que no admiten ninguna estructura diferenciable (Teorema de
Donaldson),•• y de otras que admiten múltiples estructuras difeomorfas (incluso una cantidad no numerable de ellas).Algunos ejemplos:• Sólo hay una estructura diferenciable (salvo difeomorfismos) sobre excepto cuando n = 4, caso que admite
un número no numerable de estructuras diferenciables.• La siguiente tabla muestra el número de estructuras diferenciables (modulo homeomorfismos que conservan la
orientación) sobre la n-esferas para dimensiones n < 19. Las esferas con estructuras diferenciables diferentes de lausual se conocen con el nombre de esferas exóticas.

Variedad diferenciable 115
Dimensión 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
Estructuras 1 1 1 ? 1 1 28 2 8 6 992 1 3 2 16256 2 16 16
Definiciones alternativasExisten al menos dos maneras de definir lo que es una variedad diferenciable, ambas equivalentes: por medio deparametrizaciones o por medio de aplicaciones coordenadas. La diferencia es sutil, pero importante.Además, en el caso de espacios euclídeos existe una serie de definiciones equivalentes que son más sencillas que enel caso general.
Definición mediante parametrizaciones.
Sea un conjunto (en principio pudiera ser vacío, pero es un caso trivial), y dos números enteros,una familia en la que cada es un abierto y cada unaaplicación inyectiva, de manera que se cumpla que:
1. ,
2. dados cualesquiera dos de forma que ha de ocurrir que y son abiertos de y la aplicación es diferenciable de orden en (i.e.,
).bajo estas condiciones, cada par de manera que se denomina una carta local osistema de coordenadas de en , se denomina parametrización de para , se denominaentorno coordenado de , y la familia es denominada una atlas sobre . Si un atlas es maximal (relativo al orden dado por la inclusión de conjuntos) entre todos los atlas sobre (por supuesto bajolas condiciones 1 y 2, ya que de otra manera no sería atlas) se dice que el atlas es una estructura diferenciablesobre .El conjunto (donde aquí representa la topología del conjunto
) no es otra cosa que la topología final en para la familia . Cuando se toma unaestructura diferenciable sobre y la topología final en para esa estructura diferenciable hace de unespacio topológico que cumple el segundo axioma de numerabilidad y la propiedad de Hausdorff, entonces se diceque el par formado por el conjunto y la estructura diferenciable sobre es una variedadtopológica de dimensión y clase . Cuando además , entonces se dice que es una variedad
diferenciable (de dimensión y clase ).
Definiciones en espacios euclídeosExisten al menos cuatro maneras (todas equivalentes entre sí) de definir una variedad diferencial cuando se lasconsidera como subconjuntos de un espacio euclídeo. Cada una de ellas es útil, y dependiendo del contexto o de ladificultad del problema se usará una u otra, o incluso se combinarán varias a la vez.Representación implícita de una variedad diferenciableSea un espacio euclídeo de dimensión y sea . Diremos que es una variedad diferenciable en
de dimensión (donde es un número entero) y clase (donde es un número entero) sipara cada existe un entorno abierto de y una aplicación de manera que:1. es de clase sobre (esto es, ),2. la matriz jacobiana de tiene rango (es decir, ),3. .

Variedad diferenciable 116
A la igualdad la llamaremos representación implícita local de la variedad en el punto , osimplemente diremos que la variedad viene dada implícitamente por en .Si existe un abierto y una aplicación (donde es un número entero) de manera que
, a la igualdad se la denominarepresentación implícita global de la variedad, o se dice simplemente que la variedad viene dada implícitamentepor . En este caso podemos tomar como representación implícita local para cada punto de el abierto
y la aplicación .Representación explícita de una variedad diferenciableSea un espacio euclídeo de dimensión y sea . Diremos que es una variedad diferenciable en
de dimensión (donde es un número entero) y clase (donde es un número entero) sipara cada existen:1. una base de ,2. un abierto de , donde se define el subespacio como el
espacio generado por ,3. un abierto de , donde se define el subespacio
como el espacio generado por ,4. una aplicación de clase r sobre V (esto es, )de manera que y
.La última condición equivale a decir que es la gráfica de . A la igualdad
, o simplemente a la aplicación , se le denomina representación explícita local de la variedaden el punto . Si existe una única aplicación tal que , entonces se denomina representación
explícita global de la variedad.Representación difeomórfica local de una variedad diferenciableSea un espacio euclídeo de dimensión y sea . Diremos que es una variedad diferenciable en
de dimensión (donde es un número entero) y clase (donde es un número entero) sipara cada existe un entorno abierto de y una aplicación de manera que:1. es un difeomorfismo de clase entre y su imagen (esto es, es inyectiva),2. .A la aplicación la llamaremos representación difeomórfica local de la variedad en el punto .Hay que observar que, a consecuencia de ser difeomorfismo local y abierto, es también un abierto de
.Representación paramétrica de una variedad diferenciableSea un espacio euclídeo de dimensión y sea . Diremos que es una variedad diferenciable en
de dimensión (donde es un número entero) y clase (donde es un número entero) sipara cada existe un entorno abierto de , un abierto no vacío , un elemento
y una aplicación de manera que:1. ,2. la jacobiana de en es inyectiva,3. es un homeomorfismo de clase sobre (esto es, es continua, abierta e inyectiva) entre y
(con la topología relativa).A la aplicación la llamaremos representación paramétrica local de la variedad en el punto .

Variedad diferenciable 117
Referencias• William M. Boothby, An Introduction to Differenciable Manifolds and Riemannian Geometry, 2nd ed. San
Diego: Academic Press, 1986.
•• Carmo, M. do, Riemannian Geometry. Boston: Birkhäuser, 1993.•• Currás Bosch, C. Geometria diferencial: varietats diferenciables i varietats de Riemann. Barcelona: Edicions
Universitat de Barcelona, 2003.•• Girbau, J. Geometria diferencial i relativitat. Bellaterra: Publicacions de la Universitat Autònoma de
Barcelona,1993.•• Hicks, N. J. Notas sobre la geometría diferencial. Barcelona: Hispano Europea, 1973.•• Kobayashi, S., Nomizu, K. Foundations of Differential Geometry, vol. I. New York [etc.] : Interscience, 1963.•• Spivak, M. A. Comprehensive Introduction to Differential Geometry. Boston [Mass.]: Publish or Perish,
1970-1975.Volumen I,II,IV.
•• Warner, F. W. Foundations of Differentiable Manifolds and Lie Groups. New York : Springer, 1983.• John M. Lee, Introduction to Smooth Manifolds, (2003) Springer Graduate Texts in Mathematics 218.• Roger Penrose: El camino de la realidad, Ed. Debate, Barcelona, 2006, p. 464, ISBN 84-8306-681-5.• Spivak, Michael, Cálculo en variedades. Reverté (1988), ISBN 84-291-5142-7• Spivak, Michael, A comprehensive introduction to differential geometry,volume I, Publish or Perish, Inc, Houston,
Texas, 1999, ISBN 0-914098-87-X.
Forma diferencialEn geometría diferencial, la forma diferencial es un objeto matemático perteneciente a un espacio vectorial queaparece en el cálculo multivariable, cálculo tensorial o en física. Comúnmente una forma diferencial puede serentendida como un operador multilineal antisimétrico definido sobre el espacio vectorial tangente a una variedaddiferenciable. En un espacio o variedad de dimensión n, pueden definirse 0-formas, 1-formas, ... y n-formas.El concepto de forma diferencial es una generalización sobre ideas previas como el gradiente, la divergencia, elrotacional, etc. Esa generalización y la moderna notación usada en el estudio de las formas difenciales se debe a ÉlieCartan.
0-formas, 1-formas y k-formasEl ejemplo no trivial más sencillo de una forma diferencial lo constituyen las 1-formas, también llamadas formaspfaffianas. Estas formas son la manera rigurosa de tratar los diferenciales de las funciones reales sobre una variedad(para funciones ordinarias la variedad es simplemente el espacio euclídeo, ). Las 1-formas también aparecen enfísica, así por ejemplo las "diferenciales" de las variables de estado usadas en termodinámica son de hecho 1-formas(aunque el tratamiento informal de las mismas descuida ese hecho). En la geometría diferencial o estudio de lasvariedades diferenciables, las 1-formas actúan como funciones lineales reales definidas sobre el espacio vectorialtangente a la variedad diferencial que se esté considerando. Así pues el conjunto de todas las 1-formas definidas enun punto de la variedad es isomorfo al espacio dual del espacio vectorial tangente en dicho punto.Otro ejemplo, un tanto trivial son las funciones reales definidas sobre una variedad, que pueden ser tratadas formalmente como 0-formas. El nombre se justifica porque existe un operador denominado diferencial exterior, que aplica k-formas en k+1-formas, puesto que la diferencial exterior de una función real es 1-forma, se conviene en llamar 0-formas a los objetos matemáticos, como las funciones reales, cuya diferencial es una 1-forma. Así por
Forma diferencial 118
ejemplo las funciones de estado de la termodinámica, el lagrangiano de la mecánica lagrangiana o el hamiltoniano dela mecánica hamiltoniana son de hecho 0-formas definidas sobre los respectivos espacios de configuración oespacios de fases del sistema físico.Finalmente y usando el mayor nivel de generalidad se definen las k-formas. Una forma de grado k o k-forma es unasección diferenciable de la k-ésima potencia exterior del fibrado cotangente de la variedad. En cualquier punto P enuna variedad, una k-forma da una función multilineal desde la potencia cartesiana k-ésima del espacio tangente en Pa ℝ.
Algunas definiciones formales1. El conjunto de todas las k-formas definidas en el espacio vectorial tangente de un punto x de una variedad se
llama .2. El conjunto de todas las formas diferenciales sobre una variedad de dimensión n, que resulta ser
, es el álgebra de Grassmann de la variedad y es en sí misma un espacio vectorialde dimensión 2n.
3. Existe un operador, llamado diferencial exterior 4. Una k-forma diferencial se llama cerrada si su diferencial exterior es cero, es decir, .5. Una k-forma diferencial se denomina exacta si existe otra una (k-1)-forma tal que su derivada exterior es
precisamente , es decir, .
Integración de las formasEn una variedad diferenciable de dimensión se puede definir el análogo de la longitud de una curva, elárea de una la superficie, el volumen, o en general el k-volumen. Cada uno de los conceptos métricos anteriores secalcula como la integración de una forma diferencial sobre un subconjunto de la variedad diferenciable. Así elconcepto de longitud está asociado con 1-formas, el de área con 2-formas (elemento de área), el de volumen con3-formas (elemento de volumen), etc.Matemáticamente, las formas diferenciales de grado k pueden integrarse sobre cadenas k dimensionales o másgeneralmente conjuntos de dimensión topológica k. Si k = 0, esto es simplemente la evaluación de funciones en lospuntos. Otros valores de k = 1, 2, 3 corresponden a las integrales de línea, a las integrales superficiales, a lasintegrales de volumen, etc. Un resultado muy importante, relacionado con la integración de formas se llama teoremade Stokes (del cual la regla de Barrow para integrales o el teorema de la divergencia son casos particulares).
Operaciones en formasEl conjunto de todas las k-formas en un variedad son un espacio vectorial. Además, hay otras dos operaciones:producto exterior y derivada exterior. Véase cohomología de de Rham para más detalles.La relación fundamental entre la derivada exterior y la integración viene dada por el teorema de Stokes generalizado,que también proporciona la dualidad entre la cohomología de de Rham y la homología de cadenas.
Formas diferenciales en físicaEn física el uso de formas diferenciales es común en varias áreas, por ejemplo, la termodinámica y la teoría de larelatividad. En termodinámica la práctica común llamar formas pfaffianas a las 1-formas. Lamentablemente lamayoría de manuales recurren al uso convencional de dichos objetos de una forma poco o nada rigurosa. Igualmentese suele llamar diferenciales exactas a las 1-formas exactas
Forma diferencial 119
Enlaces externos• Weisstein, Eric W. «Differential k-Form [1]» (en inglés). MathWorld. Wolfram Research.
Referencias[1] http:/ / mathworld. wolfram. com/ Differentialk-Form. html
Anexo:Problemas no resueltos de la matemáticaSe ha dado en llamar problemas no resueltos de la matemática a una serie de enunciados o conjeturas matemáticassobre los que existe una fuerte evidencia empírica de ser ciertos, pero de los que no se conoce una demostraciónmatemática rigurosa. Existen diversas listas de problemas abiertos, entre ellos los problemas del milenio o losproblemas de Hilbert (en la actualidad solo una parte de los mismos siguen siendo problemas no resueltos, habiendosido resueltos la mayoría).
Problemas del milenioLos siete problemas del milenio han sido elegidos por una institución privada de Cambridge, Massachusetts (EE.UU.), el Instituto Clay de Matemáticas, cuya resolución sería premiada, según anunció el Clay Mathematics Instituteen el año 2000, con la suma de un millón de dólares por cada uno.La lista es la siguiente:• P versus NP.• Conjetura de Hodge.• La hipótesis de Riemann.• Existencia de Yang-Mills y del salto de masa.• Existencia y unicidad de las soluciones de las ecuaciones de Navier-Stokes.• La conjetura de Birch y Swinnerton-Dyer.• La conjetura de Poincaré (resuelta).
Otros problemas no resueltos
Teoría de números
Números primos
• La conjetura de Goldbach (conjetura 'fuerte')• La conjetura de los números primos gemelos• La existencia de infinitos números primos de Mersenne• ¿Es todo número de Fermat compuesto para n > 4?• El problema de Sierpinski: "¿Cuál es el menor número de Sierpinski?" ¿Es el número 78,557? (Conjetura de
Selfridge)

Anexo:Problemas no resueltos de la matemática 120
Otros
• La conjetura de Collatz (o problema 3n + 1)•• Conjetura abc• Existencia de números perfectos impares
Álgebra• El problema inverso de Galois
Combinatoria• Número de cuadrados mágicos
Problemas resueltos recientemente• La conjetura de Goldbach (conjetura, 'débil', tentativamente resuelta por Harold Helfgott, Mayo 2013)• La conjetura de Poincaré (resuelta por Grigori Perelmán, 2002)• La conjetura de Catalan (Preda Mihăilescu, abril de 2002)• La conjetura de Taniyama-Shimura generalizada (Christophe Breuil, Brian Conrad, Fred Diamond, y Richard
Taylor, 1999)• La conjetura de Kepler (Thomas Hales, 1998)• El último teorema de Fermat (Andrew Wiles, 1995)• El teorema de los cuatro colores (Appel y Haken, 1977)
Enlaces externos• Información en www.math.unibas.ch [1]
• Información en www.matesco.unican.es [2]
• http:/ / www. maths. soton. ac. uk/ ~mjd/ Poin. pdf
Referencias[1] http:/ / www. math. unibas. ch[2] http:/ / www. matesco. unican. es/ maurica/ 2002/ millenium. html
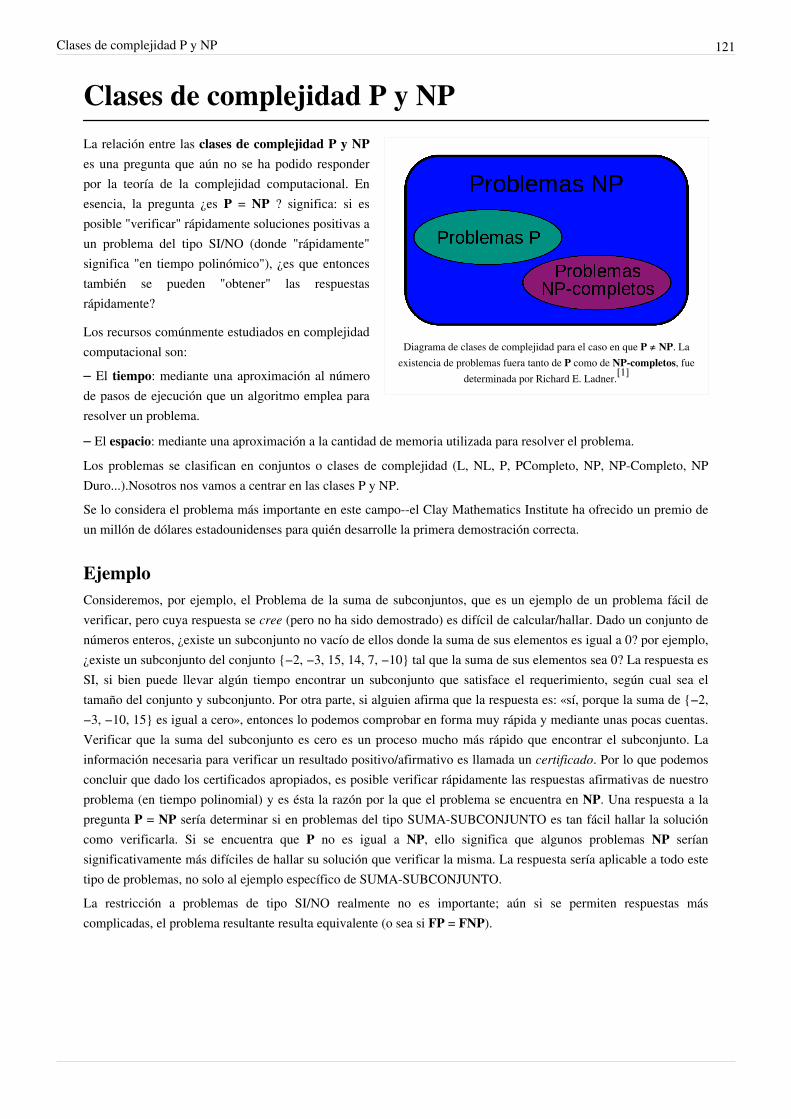
Clases de complejidad P y NP 121
Clases de complejidad P y NP
Diagrama de clases de complejidad para el caso en que P ≠ NP. Laexistencia de problemas fuera tanto de P como de NP-completos, fue
determinada por Richard E. Ladner.[1]
La relación entre las clases de complejidad P y NPes una pregunta que aún no se ha podido responderpor la teoría de la complejidad computacional. Enesencia, la pregunta ¿es P = NP ? significa: si esposible "verificar" rápidamente soluciones positivas aun problema del tipo SI/NO (donde "rápidamente"significa "en tiempo polinómico"), ¿es que entoncestambién se pueden "obtener" las respuestasrápidamente?
Los recursos comúnmente estudiados en complejidadcomputacional son:– El tiempo: mediante una aproximación al númerode pasos de ejecución que un algoritmo emplea pararesolver un problema.
– El espacio: mediante una aproximación a la cantidad de memoria utilizada para resolver el problema.Los problemas se clasifican en conjuntos o clases de complejidad (L, NL, P, PCompleto, NP, NP-Completo, NPDuro...).Nosotros nos vamos a centrar en las clases P y NP.Se lo considera el problema más importante en este campo--el Clay Mathematics Institute ha ofrecido un premio deun millón de dólares estadounidenses para quién desarrolle la primera demostración correcta.
EjemploConsideremos, por ejemplo, el Problema de la suma de subconjuntos, que es un ejemplo de un problema fácil deverificar, pero cuya respuesta se cree (pero no ha sido demostrado) es difícil de calcular/hallar. Dado un conjunto denúmeros enteros, ¿existe un subconjunto no vacío de ellos donde la suma de sus elementos es igual a 0? por ejemplo,¿existe un subconjunto del conjunto −2, −3, 15, 14, 7, −10 tal que la suma de sus elementos sea 0? La respuesta esSI, si bien puede llevar algún tiempo encontrar un subconjunto que satisface el requerimiento, según cual sea eltamaño del conjunto y subconjunto. Por otra parte, si alguien afirma que la respuesta es: «sí, porque la suma de −2,−3, −10, 15 es igual a cero», entonces lo podemos comprobar en forma muy rápida y mediante unas pocas cuentas.Verificar que la suma del subconjunto es cero es un proceso mucho más rápido que encontrar el subconjunto. Lainformación necesaria para verificar un resultado positivo/afirmativo es llamada un certificado. Por lo que podemosconcluir que dado los certificados apropiados, es posible verificar rápidamente las respuestas afirmativas de nuestroproblema (en tiempo polinomial) y es ésta la razón por la que el problema se encuentra en NP. Una respuesta a lapregunta P = NP sería determinar si en problemas del tipo SUMA-SUBCONJUNTO es tan fácil hallar la solucióncomo verificarla. Si se encuentra que P no es igual a NP, ello significa que algunos problemas NP seríansignificativamente más difíciles de hallar su solución que verificar la misma. La respuesta sería aplicable a todo estetipo de problemas, no solo al ejemplo específico de SUMA-SUBCONJUNTO.La restricción a problemas de tipo SI/NO realmente no es importante; aún si se permiten respuestas máscomplicadas, el problema resultante resulta equivalente (o sea si FP = FNP).
Clases de complejidad P y NP 122
Contexto del problemaLa relación entre las clases de complejidad P y NP es estudiada por la teoría de la complejidad computacional, laparte de la teoría de la computación que trata de los recursos requeridos durante el cálculo para resolver un problemadado. Los recursos más usuales son tiempo (¿cuántos pasos son necesarios para resolver un problema?) y espacio(¿cuánta memoria es necesaria para resolver un problema?).En este tipo de análisis, se requiere un modelo de la computadora para la que desea estudiar el requerimiento entérminos de tiempo. Típicamente, dichos modelos suponen que la computadora es determinista (dado el estado actualde la computadora y las variables de entrada, existe una única acción posible que la computadora puede tomar) ysecuencial (realiza las acciones una después de la otra). Estas suposiciones son adecuadas para representar elcomportamiento de todas las computadoras existentes, aún incluye a las máquinas con computación en paralelo.En esta teoría, la clase P consiste de todos aquellos problemas de decisión que pueden ser resueltos en una máquinadeterminista secuencial en un período de tiempo polinomial en proporción a los datos de entrada. En la teoría decomplejidad computacional, la clase P es una de las más importantes; la clase NP consiste de todos aquellosproblemas de decisión cuyas soluciones positivas/afirmativas pueden ser verificadas en tiempo polinómico a partirde ser alimentadas con la información apropiada, o en forma equivalente, cuya solución puede ser hallada en tiempopolinómico en una máquina no determinista. Por lo tanto, la principal pregunta aún sin respuesta en la teoría de lacomputación está referida a la relación entre estas dos clases:
¿Es P igual a NP?En una encuesta realizada en el 2002 entre 100 investigadores, 61 creían que la respuesta era NO, 9 creían que larespuesta era SI, 22 no estaban seguros, y 8 creían que la pregunta podía ser independiente de los axiomasactualmente aceptados, y por lo tanto imposible de demostrar por el SI o por el NO.
Definiciones formalesMás precisamente, un problema de decisión es un problema que especifica una cadena de caracteres de datos deentrada y requiere como solución una respuesta por el SI o por el NO. Si existe un algoritmo (por ejemplo unamáquina de Turing, o un programa en lenguajes Lisp o Pascal con memoria irrestricta) que es capaz de entregar larespuesta correcta para toda cadena de datos de longitud n en a lo sumo pasos, donde k y c son constantesindependientes del conjunto de datos, entonces se dice que el problema puede ser resuelto en tiempo polinómico y loclasificamos como perteneciente a la clase P. En forma intuitiva, consideramos que los problemas contenidos en Pson aquellos que pueden ser resueltos en forma razonablemente rápida.P suele ser la clase de problemas computacionales que son “eficientemente resolubles” o “tratables”, aunque hayaclases potencialmente más grandes que también se consideran tratables, como RP Y BPP. Aunque también existenproblemas en P que no son tratables en términos prácticos; por ejemplo, unos requieren al menos operaciones.En forma intuitiva, se puede pensar que NP es un problema de decisión que es difícil de resolver si no se poseeningún otro dato o información adicional. Sin embargo, si se recibe la información adicional llamada un certificado,entonces el problema puede ser resuelto fácilmente. Por ejemplo, si se nos da el número 323 y se nos pregunta si 323es un número factorizable, sin darnos ningún dato o información adicional, deberíamos analizar todos los númerosenteros positivos mayores que 2 pero menores que 323 para estudiar si alguno de ellos divide exactamente al 323.Sin embargo, si se nos da el número 17, podemos dividir 323 por 17 y rápidamente verificar que 323 es factorizable.El número 17 es llamado un certificado. El proceso de división para verificar que 323 es factorizable es en esenciauna máquina Turing y en este caso es denominado el verificador para 323. Técnicamente se dice que el problema esfácil si se puede resolver en tiempo polinómico y que es difícil si se resuelve en tiempo exponencial. Formalmente,se define NP como un conjunto de lenguajes que satisfacen ciertas condiciones.Sea L un lenguaje definido sobre un alfabeto finito, .
Clases de complejidad P y NP 123
Si existe una relación binaria y un entero positivo tal que para todo , se satisfacen lassiguientes condiciones:
(i) tal que y O .(ii) El lenguaje = en es decible.Entonces, la máquina de Turing que decide (que la llamaremos ) es llamada el Verificador para y esllamado el Certificado de membresía de en .Finalmente, se encuentra en NP "si y solo si" corre en tiempo polinómico.Ejemplo.
Sea = =
Claramente, la pregunta de si un dado es factorizable es equivalente a la pregunta sobre si es un miembro de. De hecho, se puede demostrar fácilmente que si se verifica quesatisface la condición indicada previamente.
(Nota. Recientemente se demostró que estaba dentro de P)
La clase PP es conocido por contener muchos problemas naturales, incluyendo las versiones de decisión de programa lineal,cálculo del máximo común divisor, y encontrar una correspondencia máxima.Problemas notables en P
Algunos problemas naturales son completos para P, incluyendo la conectividad (o la accesibilidad) en grafos nodirigidos.Una generalización de P es NP, que es la clase de lenguajes decidibles en tiempo polinómico sobre una máquina deTuring no determinista. De forma trivial, tenemos que P es un subconjunto de NP. Aunque no está demostrado, lamayor parte de los expertos creen que esto es un subconjunto estricto.Aquí, EXPTIME es la clase de problemas resolubles en tiempo exponencial. De todas las clases mostradas arriba,sólo se conocen dos contenciones estrictas:•• P estrictamente está contenido en EXPTIME.• L estrictamente está contenida en PSPACE.Los problemas más difíciles en P son los problemas P-completos
Otra generalización de P es el Tiempo polinómico No uniforme (P/Poly)[2]. Si un problema está en P/poly, entoncespuede solucionarse en un tiempo polinomial determinado el cual, dado una cadena, este solo depende de la longitudde la entrada. A diferencia de NP, no se comprueban las cadenas defectuosas que entran en la máquina de Turing,puesto que no es un verificador.P/poly es una clase grande que contiene casi todos los algoritmos prácticos, incluyendo todo el BPP. Si esta contienea NP, la jerarquía polinomial se colapsa con el segundo nivel. Por otra parte, esta también contiene algunosalgoritmos poco prácticos, incluyendo algunos problemas no decidibles.Propiedades
Los algoritmos de tiempo polinómico son cerrados respecto a la composición. Intuitivamente, esto quiere decir quesi uno escribe una función con un determinado tiempo polinómico y consideramos que las llamadas a esa mismafunción son constantes y, de tiempo polinómico, entonces el algoritmo completo es de tiempo polinómico. Esto esuno de los motivos principales por los que P se considera una máquina independiente; algunos rasgos de estamáquina, como el acceso aleatorio, es que puede calcular en tiempo polinómico el tiempo polinómico del algoritmoprincipal reduciéndolo a una máquina más básica.
Clases de complejidad P y NP 124
Las pruebas existenciales de algoritmos de tiempo polinómico
Se conoce que algunos problemas son resolubles en tiempo polinómico, pero no se conoce ningún algoritmoconcreto para solucionarlos. Por ejemplo, el teorema Robertson-Seymour garantiza que hay una lista finita de losmenores permitidos que compone (por ejemplo) el conjunto de los grafos que pueden ser integrados sobre untoroide; además, Robertson y Seymour demostraron que hay una complejidad O (n3) en el algoritmo para determinarsi un grafo tiene un grafo incluido. Esto nos da una prueba no constructiva de que hay un algoritmo de tiempopolinómico para determinar si dado un grafo puede ser integrado sobre un toroide, a pesar de no conocerse ningúnalgoritmo concreto para este problema.Ejemplos
Camino Mínimo: encontrar el camino mínimo desde un vértice origen al resto de los vértices.Ciclo Euleriano: Encontrar un ciclo que pase por cada arco de un grafo una única vez.
La clase NPLa clase NP está compuesta por los problemas que tienen un certificado sucinto (también llamado testigopolinómico) para todas las instancias cuya respuesta es un SÍ. La única forma de que tengan un tiempo polinomial esrealizando una etapa aleatoria, incluyendo el azar de alguna manera para elegir una posible solución, y entonces enetapas posteriores comprueba si esa solución es correcta.En otras palabras, dada una solución para una cierta instancia, es posible comprobar que es válida en TIME (n^k). Enel caso de SAT (Problema de satisfacibilidad booleana), dado una asignación de valores de verdad, se puedecomprobar fácilmente si la fórmula es cierta o no. Una nMT puede "adivinar" la solución en O (n) y verificarla entiempo polinómico.Completitud de NP
Para analizar la pregunta P = NP, resulta muy útil el concepto de completitud NP. De manera informal, losproblemas de completitud NP son los problemas más "difíciles" en NP en el sentido de que ellos son los que son másprobable no se encuentren en P. Problemas NP-difíciles son aquellos para los cuales cualquier problema en NPpuede ser reducido en tiempo polinómico. Los problemas de completitud NP son aquellos problemas NP-difícil quese encuentran en NP. Por ejemplo, la versión de problema de decisión del problema del vendedor viajero escompletamente NP. Así ningún caso de ningún problema en NP puede ser transformado mecánicamente en una partedel problema del vendedor viajero, en tiempo polinómico. Por lo tanto, si el problema del vendedor viajero estuvieracontenido en P, entonces P = NP. El problema del vendedor viajero es uno de muchos problemas NP-completos. Sicualquier problema NP-completo se encuentra contenido en P, entonces se verificaría que P = NP.Desafortunadamente, se ha demostrado que muchos problemas importantes son NP-completos y no se conoce laexistencia de ningún algoritmo rápido para ellos.La definición anterior de NP permite considerar de manera natural una clase de problemas complementarias. Laco-NP está compuesta por los problemas que tienen un contraejemplo sucinto para todas las instancias cuyarespuesta es NO.Problema Clique
Denominamos Clique al siguiente problema:Dado un grafo G y un entero k, ¿es posible encontrar un subgrafo de G completo de tamaño k?• Claramente Clique pertenece a NP.• Ahora deberemos hacer una reducción de SAT a NP.• Supongamos que tenemos una fórmula en CNF:C1 v C2 v . . . v Ck con n variables proposicionales.

Clases de complejidad P y NP 125
Formaremos un grafo G con un nodo por cada literal que aparece en cada cláusula. Cada nodo está etiquetado con elliteral que le dio origen. Agregaremos un arco entre un nodo etiquetado con l y un nodo etiquetado con l0 si y solosi:– l y l0 están en cláusulas distintas.– l no es el literal complementario de l.Supongamos la siguiente fórmula: (x1 v x2 v ¬x3) ^ (¬x1 v ¬x3) ^ (x3 v x2). El grafo resultante queda como:Ahora deberemos demostrar que G tiene un subgrafo completo de tamaño k si es satisfactible. Como todos losmiembros del subgrafo pertenecen a cláusulas distintas, cualquier valuación que hace verdadero a todo literal en elsubgrafo hace verdadera a la fórmula (recordemos que dos literales complementarios no pueden estar en un subgrafocompleto). Si la fórmula es satisfecha, debe existir una valuación que haga verdaderos a al menos un literal en cadacláusula. Sean l1 pertenece a C1, l2 pertenece a C2, . . . , lk pertenece Ck estos literales. Notemos que no es posibleque existan dos literales complementarios li y lj. Necesariamente, entonces, podemos construir arcos entre cada parde nodos en donde aparecen dichos literales siguiendo las reglas de construcción del grafo.Ejemplos
Camino Máximo: Dados dos vértices de un grafo encontrar el camino (simple) máximo.Ciclo Hamiltoniano: Ciclo simple que contiene cada vértice del grafo.
NP-CompletoPara abordar la pregunta de si P=NP, el concepto de la completitud de NP es muy útil. Informalmente, los problemasde NP-completos son los problemas más difíciles de NP, en el sentido de que son los más probables de noencontrarse en P. Los problemas de NP-completos son esos problemas NP-duros que están contenidos en NP, dondelos problemas NP-duros son estos que cualquier problema en NP puede ser reducido a complejidad polinomial. Porejemplo, la decisión del Problema del viajante de comercio es NP-completo, así que cualquier caso de cualquierproblema en NP puede ser transformado mecánicamente en un caso del Problema del viajante de comercio, decomplejidad polinomial. El Problema del viajante de comercio es de los muchos problemas NP-completos existentes.Si cualquier problema NP-completo estuviera en P, entonces indicaría que P=NP. Desafortunadamente, se sabe quemuchos problemas importantes son NP-completos y a fecha de 2008, no se conoce ningún algoritmo rápido paraninguno de ellos. Basándonos solo en esta idea, no es obvio que exista un problema NP-completo. Un problemaNP-completo trivial e ideado, se puede formular como: Dada una descripción de una máquina de Turing M que sedetiene en tiempo polinómico, ¿existe una entrada de tamaño polinómico que M acepte? Es NP porque, dada unaentrada, es simple comprobar si M acepta o no la entrada simulando M, es NP-duros porque el verificador paracualquier caso particular de un problema en NP puede ser codificado como una maquina M de tiempo polinomialque toma la solución para ser verificada como entrada. Entonces la pregunta de si el caso es o no un caso, estádeterminado por la existencia de una entrada valida. El primer problema natural que se demostró ser NP-completofue el Problema booleano de satisfacibilidad. Este resultado es conocido como el teorema de Cook-Levin; su pruebade que la satisfacibilidad es NP-completo contiene los detalles técnicos sobre máquinas de Turing y como serelacionan con la definición de NP. Sin embargo, después se demostró que el problema era NP-completo, la pruebapor reducción, proporcionó una manera más simple de demostrar que muchos otros problemas están en esta clase.Así, una clase extensa de problemas aparentemente sin relación es reducible a otra, y son en este sentido el mismoproblema.
Clases de complejidad P y NP 126
Referencias[1] R. E. Ladner "On the structure of polynomial time reducibility," Journal ACM, 22, pp. 151–171, 1975, Corollary 1.1, sitio web de ACM
(http:/ / portal. acm. org/ citation. cfm?id=321877& dl=ACM& coll=& CFID=15151515& CFTOKEN=6184618).[2] http:/ / en. wikipedia. org/ wiki/ P/ poly
Bibliografía• A. S. Fraenkel and D. Lichtenstein, Computing a perfect strategy for n*n chess requires time exponential in n,
Proc. 8th Int. Coll. Automata, Languages, and Programming, Springer LNCS 115 (1981) 278-293 and J. Comb.Th. A 31 (1981) 199-214.
•• E. Berlekamp and D. Wolfe, Mathematical Go: Chilling Gets the Last Point, A. K. Peters, 1994. D. Wolfe, Goendgames are hard, MSRI Combinatorial Game Theory Research Worksh., 2000.
• Neil Immerman. Languages Which Capture Complexity Classes. 15th ACM STOC Symposium, pp.347-354. 1983.• Thomas H. Cormen, Charles E. Leiserson, Ronald L. Rivest, and Clifford Stein (2001). «Chapter 34:
NP-Completeness». Introduction to Algorithms (Second Edition edición). MIT Press and McGraw-Hill.pp. 966–1021. ISBN 0-262-03293-7.
• Christos Papadimitriou (1993). «Chapter 14: On P vs. NP». Computational Complexity (1st edition edición).Addison Wesley. pp. 329–356. ISBN 0-201-53082-1.
•• Apuntes de clase de la asignatura Análisis y Diseño de Algoritmos de la Escuela Superior de Infórmatica deMálaga
Enlaces externos• The Clay Math Institute Millennium Prize Problems (http:/ / www. claymath. org/ prizeproblems/ index. htm) (en
inglés)• The Clay Math Institute Official Problem Description (pdf) (http:/ / web. archive. org/ web/ http:/ / www.
claymath. org/ millennium/ P_vs_NP/ Official_Problem_Description. pdf) (en inglés)• Gerhard J. Woeginger. The P-versus-NP page (http:/ / www. win. tue. nl/ ~gwoegi/ P-versus-NP. htm). A list of
links to a number of purported solutions to the problem. Some of these links state that P equals NP, some of themstate the opposite. It's probable that all these alleged solutions are incorrect. (en inglés)
• Computational Complexity of Games and Puzzles (http:/ / www. ics. uci. edu/ ~eppstein/ cgt/ hard. html)• Scott Aaronson's Complexity Zoo: P (http:/ / web. archive. org/ web/ http:/ / qwiki. caltech. edu/ wiki/
Complexity_Zoo#p), NP (http:/ / web. archive. org/ web/ http:/ / qwiki. caltech. edu/ wiki/ Complexity_Zoo#np)(en inglés)
• Qeden (http:/ / www. qeden. com/ ), a wiki that aims to solve the Millennium Prize Problems (en inglés)• Scott Aaronson's Shtetl Optimized blog: Reasons to believe (http:/ / scottaaronson. com/ blog/ ?p=122), a list of
justifications for the belief that P ≠ NP (en inglés)
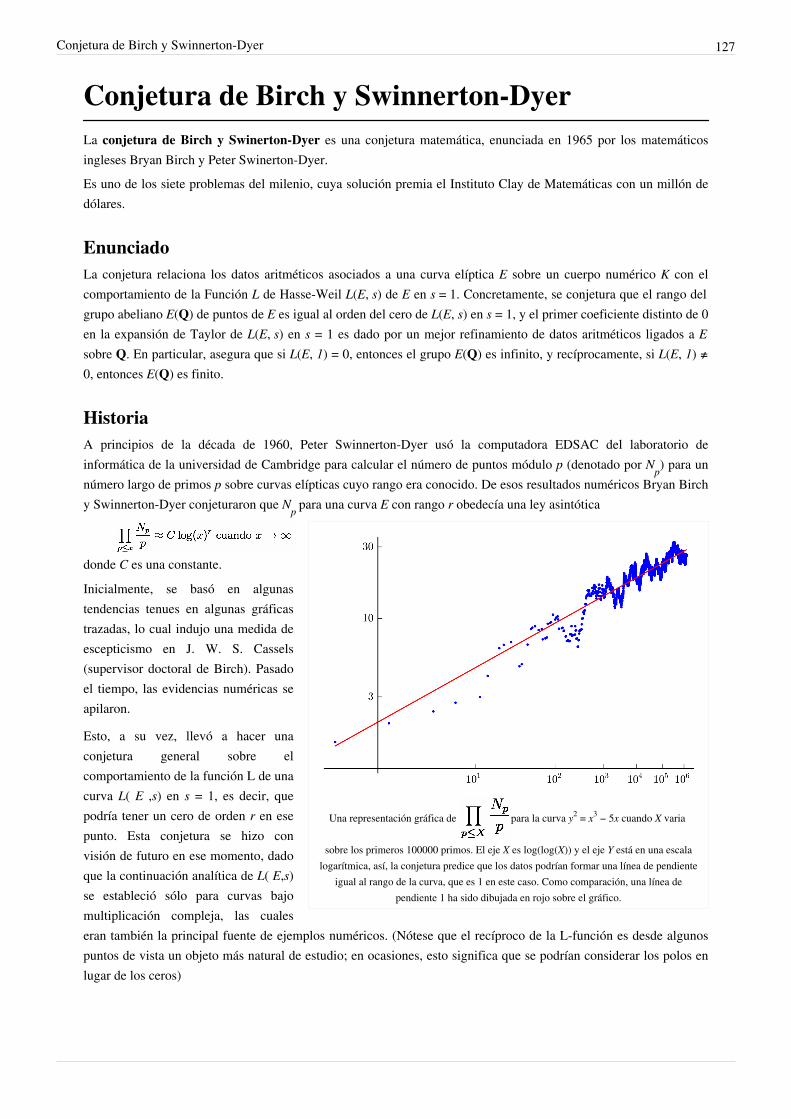
Conjetura de Birch y Swinnerton-Dyer 127
Conjetura de Birch y Swinnerton-DyerLa conjetura de Birch y Swinerton-Dyer es una conjetura matemática, enunciada en 1965 por los matemáticosingleses Bryan Birch y Peter Swinerton-Dyer.Es uno de los siete problemas del milenio, cuya solución premia el Instituto Clay de Matemáticas con un millón dedólares.
EnunciadoLa conjetura relaciona los datos aritméticos asociados a una curva elíptica E sobre un cuerpo numérico K con elcomportamiento de la Función L de Hasse-Weil L(E, s) de E en s = 1. Concretamente, se conjetura que el rango delgrupo abeliano E(Q) de puntos de E es igual al orden del cero de L(E, s) en s = 1, y el primer coeficiente distinto de 0en la expansión de Taylor de L(E, s) en s = 1 es dado por un mejor refinamiento de datos aritméticos ligados a Esobre Q. En particular, asegura que si L(E, 1) = 0, entonces el grupo E(Q) es infinito, y recíprocamente, si L(E, 1) ≠0, entonces E(Q) es finito.
HistoriaA principios de la década de 1960, Peter Swinnerton-Dyer usó la computadora EDSAC del laboratorio deinformática de la universidad de Cambridge para calcular el número de puntos módulo p (denotado por Np) para unnúmero largo de primos p sobre curvas elípticas cuyo rango era conocido. De esos resultados numéricos Bryan Birchy Swinnerton-Dyer conjeturaron que Np para una curva E con rango r obedecía una ley asintótica
Una representación gráfica de para la curva y2 = x3 − 5x cuando X varia
sobre los primeros 100000 primos. El eje X es log(log(X)) y el eje Y está en una escalalogarítmica, así, la conjetura predice que los datos podrían formar una línea de pendiente
igual al rango de la curva, que es 1 en este caso. Como comparación, una línea dependiente 1 ha sido dibujada en rojo sobre el gráfico.
donde C es una constante.Inicialmente, se basó en algunastendencias tenues en algunas gráficastrazadas, lo cual indujo una medida deescepticismo en J. W. S. Cassels(supervisor doctoral de Birch). Pasadoel tiempo, las evidencias numéricas seapilaron.
Esto, a su vez, llevó a hacer unaconjetura general sobre elcomportamiento de la función L de unacurva L( E ,s) en s = 1, es decir, quepodría tener un cero de orden r en esepunto. Esta conjetura se hizo convisión de futuro en ese momento, dadoque la continuación analítica de L( E,s)se estableció sólo para curvas bajomultiplicación compleja, las cualeseran también la principal fuente de ejemplos numéricos. (Nótese que el recíproco de la L-función es desde algunospuntos de vista un objeto más natural de estudio; en ocasiones, esto significa que se podrían considerar los polos enlugar de los ceros)

Conjetura de Birch y Swinnerton-Dyer 128
La conjetura fue ampliada posteriormente para incluir la predicción precisa del coeficiente de Taylor principal de lafunción L en s = 1. Esto fue conjeturado mediante
donde las cantidades del miembro de la derecha son invariantes de la curva, estudiadas por Cassels, Tate,Shafarevich y otros: éste incluye el orden del grupo de torsión, el orden del grupo de Tate–Shafarevich, y las alturascanónicas de una base de puntos racionales.
Referencias
Enlaces externos• Tonterías sobre geometría aritmética (http:/ / www. uam. es/ gruposinv/ ntatuam/ stn/ 03022005. pdf) (2005, pp.
13-14)• Descripción oficial del problema (http:/ / www. claymath. org/ millennium/
Birch_and_Swinnerton-Dyer_Conjecture/ birchswin. pdf) (por Andrew Wiles)• Millennium Prize Problems (http:/ / www. claymath. org/ millennium/ )
Conjetura de CollatzLa conjetura de Collatz, conocida también como conjetura 3n+1 o conjetura de Ulam (entre otros nombres), fueenunciada por el matemático Lothar Collatz en 1937, y a la fecha no se ha resuelto.
Enunciado
Tiempo de órbita (número de iteraciones) necesario para alcanzar la unidad paranúmeros comprendidos entre 1 y 13000.
Sea la siguiente operación, aplicable acualquier número entero positivo:
•• Si el número es par, se divide entre 2.•• Si el número es impar, se multiplica por 3
y se suma 1.Formalmente, esto equivale a una función
:
Dado un número cualquiera, podemosconsiderar su órbita, es decir, las imágenessucesivas al iterar la función. Por ejemplo, sin=13:
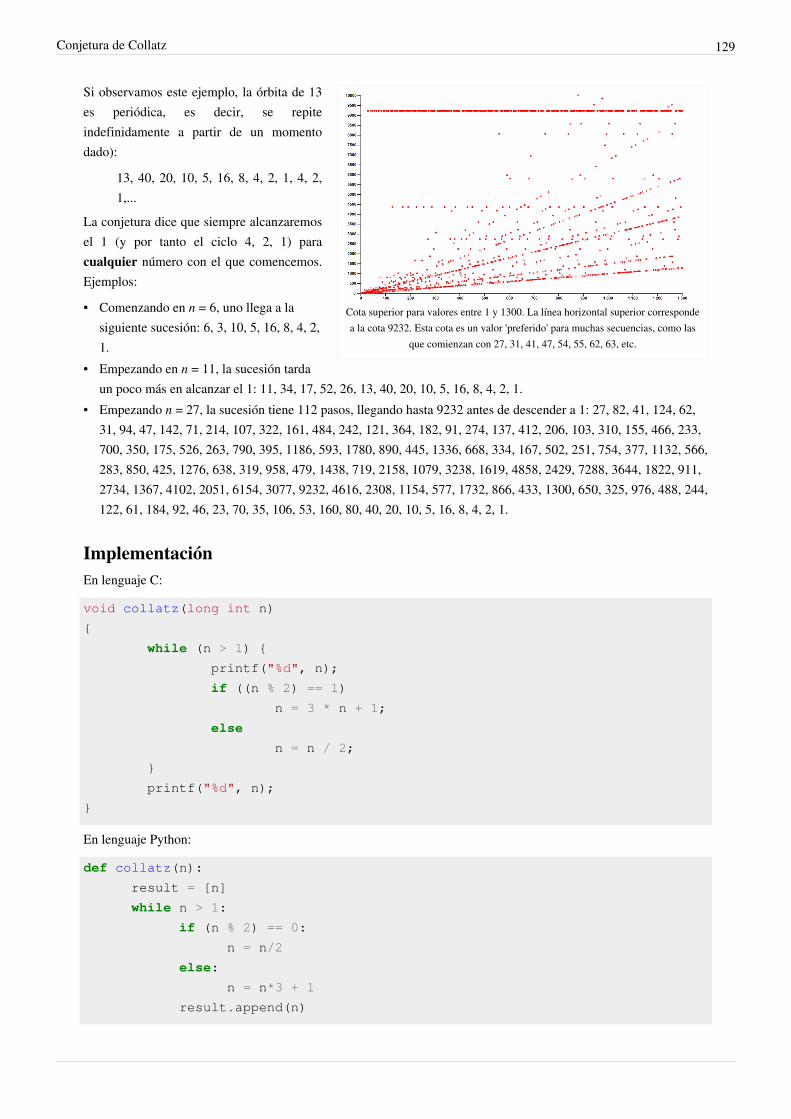
Conjetura de Collatz 129
Cota superior para valores entre 1 y 1300. La línea horizontal superior correspondea la cota 9232. Esta cota es un valor 'preferido' para muchas secuencias, como las
que comienzan con 27, 31, 41, 47, 54, 55, 62, 63, etc.
Si observamos este ejemplo, la órbita de 13es periódica, es decir, se repiteindefinidamente a partir de un momentodado):
13, 40, 20, 10, 5, 16, 8, 4, 2, 1, 4, 2,1,...
La conjetura dice que siempre alcanzaremosel 1 (y por tanto el ciclo 4, 2, 1) paracualquier número con el que comencemos.Ejemplos:
• Comenzando en n = 6, uno llega a lasiguiente sucesión: 6, 3, 10, 5, 16, 8, 4, 2,1.
• Empezando en n = 11, la sucesión tardaun poco más en alcanzar el 1: 11, 34, 17, 52, 26, 13, 40, 20, 10, 5, 16, 8, 4, 2, 1.
• Empezando n = 27, la sucesión tiene 112 pasos, llegando hasta 9232 antes de descender a 1: 27, 82, 41, 124, 62,31, 94, 47, 142, 71, 214, 107, 322, 161, 484, 242, 121, 364, 182, 91, 274, 137, 412, 206, 103, 310, 155, 466, 233,700, 350, 175, 526, 263, 790, 395, 1186, 593, 1780, 890, 445, 1336, 668, 334, 167, 502, 251, 754, 377, 1132, 566,283, 850, 425, 1276, 638, 319, 958, 479, 1438, 719, 2158, 1079, 3238, 1619, 4858, 2429, 7288, 3644, 1822, 911,2734, 1367, 4102, 2051, 6154, 3077, 9232, 4616, 2308, 1154, 577, 1732, 866, 433, 1300, 650, 325, 976, 488, 244,122, 61, 184, 92, 46, 23, 70, 35, 106, 53, 160, 80, 40, 20, 10, 5, 16, 8, 4, 2, 1.
ImplementaciónEn lenguaje C:
void collatz(long int n)
while (n > 1)
printf("%d", n);
if ((n % 2) == 1)
n = 3 * n + 1;
else
n = n / 2;
printf("%d", n);
En lenguaje Python:
def collatz(n):
result = [n]
while n > 1:
if (n % 2) == 0:
n = n/2
else:
n = n*3 + 1
result.append(n)
Conjetura de Collatz 130
print(result)
Estado actual del problemaAunque no se ha demostrado la veracidad ni falsedad del resultado, existen ciertas evidencias en ambossentidos[cita requerida].Si existe algún contraejemplo a la conjetura (es decir, un número cuya secuencia no alcance nunca el 1), debesatisfacer alguna de estas condiciones:• la órbita del número no está acotada; o bien•• la órbita también es periódica, pero con un período distinto de 4, 2, 1.
Evidencia computacionalAunque formalmente no demuestra nada, existen diversos grupos de computación que se dedican a calcular lassecuencias de números cada vez más grandes. En noviembre de 2005 se comprobó la conjetura para todas lassecuencias de números menores que . Esta es una evidencia intuitiva fuerte a favor de la veracidad del resultado,a pesar de no aportar nada formalmente hablando.
Resultados parciales
Suma de potencias de exponente par
Los números que son suma de potencias de 2 exponente par, como 5 = 1 + 4, 21 = 1 + 4 + 16, 53 = 1 + 4 + 16 + 32,85 = 1 + 4 + 16 + 64 generan el 1 en forma casi directa, como en el ejemplo:21 · 3 + 1 = 64, que es una potencia de 2 y genera el 1 al dividir 6 veces entre 2.
Suma de potencias más tres
Al agregar un 3 al final a estos números (a partir del 1, el 13, a partir del 5, el 53, a partir del 21, el 213, a partir del85, el 853, etc), se obtiene 5, a partir del cual se obtiene 1.213 = 210 + 3213 · 3 + 1 = 639 + 1 = 640 = 5 · 128128 es una potencia de 2, por lo que, dividiendo 7 veces entre 2, se llega a 1.
Potencias de dos más uno
Los números que son de la forma generan y estos son menores que el número de partida paratodo n natural.
3 mod 6
Los números que son de la forma 3 mod 6 pueden considerarse como generadores de números mayores. Por ejemplo,el 31 puede generarse partiendo del 27. De la misma forma, el 111 genera el 334 que pertenece a la sucesión denúmeros que empieza en el 27
Patrones binarios
Se ha propuesto el estudio de patrones en sistema binario para el estudio de las propiedades de los númerosexpresados como polinomios de potencias de 2, lo que simplifica el estudio de las propiedades de los mismos. Luegopueden ser demostrados los teoremas correspondientes. Por ejemplo, los números como 5, 21, 53, 85, etc., tienen unaexpresión del tipo 10101..01 en sistema binario. Esos números son, entonces, los coeficientes de un polinomio enpotencias pares de 2.
Conjetura de Collatz 131
Los números del tipo 111...11 (n unos) que son iguales a , generan en un primer momento los de este tipo:1011...111, (n+1 cifras). En un segundo momento se obtiene 10001...1 (n+2 cifras), luego 11010111...1, etc.
Enlaces externos• Información actualizada sobre cálculos [1] (en inglés)• Web de un investigador que busca una demostración [2] (en inglés)• Artículo de revisión sobre el tema [3] (en inglés)• Método recursivo del algoritmo en PHP [4]
• Implementación del algoritmo en PHP [5]
• Proyecto BOINC, que usa el poder de cálculo de las GPU´s (Ati, Nvidia) y de CPU, para encontrar la solución aeste problema [6] (en ingles)
• Ponencia presentada en el 43 Congreso de la Sociedad Matemática Mexicana; Tuxtla Gutiérrez,Chiapas 2010 [7]
• Establece una relación entre los conjuntos infinitos resultantes de la aplicación del algoritmo de Collatz y elconjunto resultante de la progresión geométrica que crece en razón de 2n desde el valor inicial 1 al infinito(2n;1,∞) [8]
• La conjetura de Collatz y otros agujeros negros matemáticos [9]
Referencias[1] http:/ / www. ieeta. pt/ ~tos/ 3x+ 1. html[2] http:/ / www-personal. ksu. edu/ ~kconrow/[3] http:/ / www. cecm. sfu. ca/ organics/ papers/ lagarias/[4] http:/ / develman. info/ a/ problema-de-syracuse/[5] http:/ / develop. ignoranto. info/ php/ syracuse. php[6] http:/ / boinc. thesonntags. com/ collatz/[7] http:/ / www. tec-digital. itcr. ac. cr/ revistamatematica/ ARTICULOS_V11_N2_2011/ MPERAL_V11N2_2011/ index. html[8] http:/ / www. monografias. com/ trabajos92/ vertientes-criticas-secuencias-collatz/ vertientes-criticas-secuencias-collatz. shtml[9] http:/ / www. matifutbol. com/ es/ agujeronegro. html#collatz
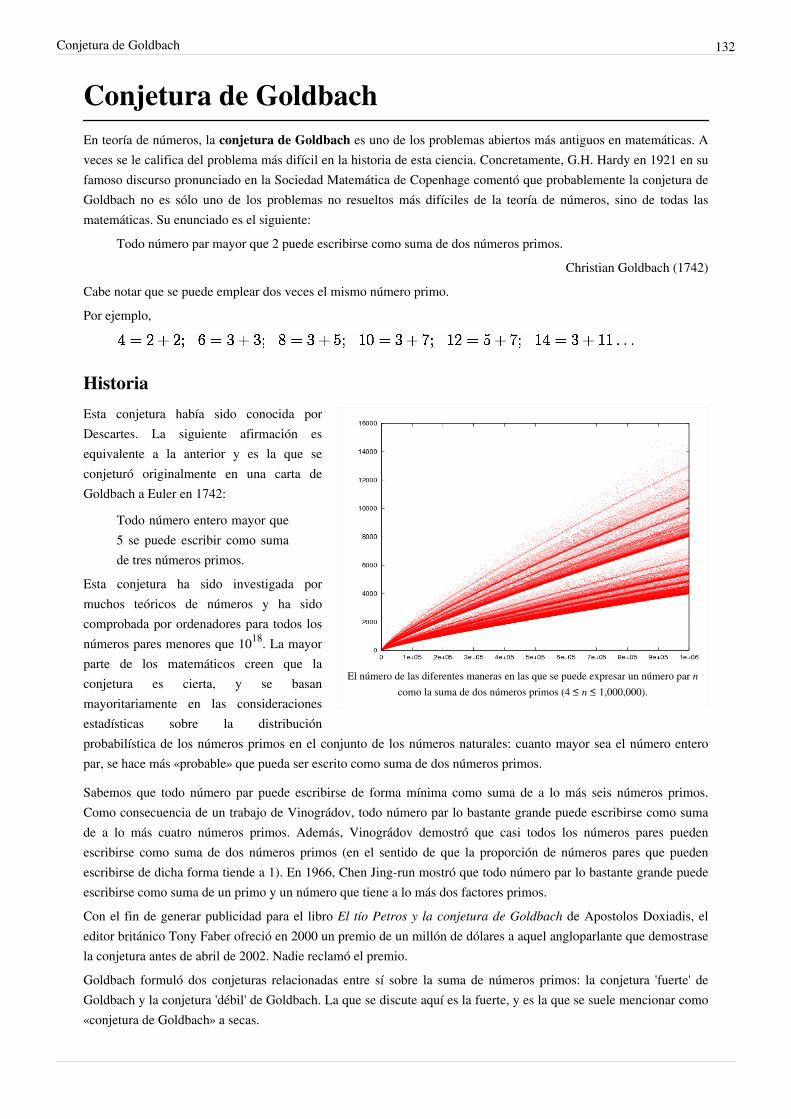
Conjetura de Goldbach 132
Conjetura de GoldbachEn teoría de números, la conjetura de Goldbach es uno de los problemas abiertos más antiguos en matemáticas. Aveces se le califica del problema más difícil en la historia de esta ciencia. Concretamente, G.H. Hardy en 1921 en sufamoso discurso pronunciado en la Sociedad Matemática de Copenhage comentó que probablemente la conjetura deGoldbach no es sólo uno de los problemas no resueltos más difíciles de la teoría de números, sino de todas lasmatemáticas. Su enunciado es el siguiente:
Todo número par mayor que 2 puede escribirse como suma de dos números primos.Christian Goldbach (1742)
Cabe notar que se puede emplear dos veces el mismo número primo.Por ejemplo,
Historia
El número de las diferentes maneras en las que se puede expresar un número par ncomo la suma de dos números primos (4 ≤ n ≤ 1,000,000).
Esta conjetura había sido conocida porDescartes. La siguiente afirmación esequivalente a la anterior y es la que seconjeturó originalmente en una carta deGoldbach a Euler en 1742:
Todo número entero mayor que5 se puede escribir como sumade tres números primos.
Esta conjetura ha sido investigada pormuchos teóricos de números y ha sidocomprobada por ordenadores para todos losnúmeros pares menores que 1018. La mayorparte de los matemáticos creen que laconjetura es cierta, y se basanmayoritariamente en las consideracionesestadísticas sobre la distribuciónprobabilística de los números primos en el conjunto de los números naturales: cuanto mayor sea el número enteropar, se hace más «probable» que pueda ser escrito como suma de dos números primos.
Sabemos que todo número par puede escribirse de forma mínima como suma de a lo más seis números primos.Como consecuencia de un trabajo de Vinográdov, todo número par lo bastante grande puede escribirse como sumade a lo más cuatro números primos. Además, Vinográdov demostró que casi todos los números pares puedenescribirse como suma de dos números primos (en el sentido de que la proporción de números pares que puedenescribirse de dicha forma tiende a 1). En 1966, Chen Jing-run mostró que todo número par lo bastante grande puedeescribirse como suma de un primo y un número que tiene a lo más dos factores primos.Con el fin de generar publicidad para el libro El tío Petros y la conjetura de Goldbach de Apostolos Doxiadis, eleditor británico Tony Faber ofreció en 2000 un premio de un millón de dólares a aquel angloparlante que demostrasela conjetura antes de abril de 2002. Nadie reclamó el premio.Goldbach formuló dos conjeturas relacionadas entre sí sobre la suma de números primos: la conjetura 'fuerte' deGoldbach y la conjetura 'débil' de Goldbach. La que se discute aquí es la fuerte, y es la que se suele mencionar como«conjetura de Goldbach» a secas.
Conjetura de Goldbach 133
Se ha trabajado mucho en la conjetura débil, culminando en 2013 en una reivindicación del matemático peruanoHarald Helfgott[1] sobre su demostración completa.
Obras influidas por esta conjeturaEn cine:• La conjetura de Goldbach forma parte de la trama de la película española La habitación de Fermat (2007).• También aparece en la película Proof, conocida en España como La verdad oculta (2005).• En la segunda película de Futurama, La bestia con un millón de espaldas (2008), el profesor Hubert Fansworth la
menciona.En literatura:• El tío Petros y la Conjetura de Goldbach es una novela de Apostolos Doxiadis que gira en torno a la vida de un
joven cuyo tío dedicó su vida a intentar resolver esta conjetura.En internet:• El enigma de Goldbach [2]. Los enigmas de Tierra Quebrada son una recopilación de enigmas para resolver de
diferentes temáticas y dificultades. Entre ellos El enigma Goldbach está basado en la Conjetura de Goldbach.
Referencias[1] http:/ / actualidad. rt. com/ ciencias/ view/ 95102-cientifico-demostrar-problema-matematico[2] http:/ / www. tierraquebrada. com/ 2013/ el-enigma-de-goldbach/
Enlaces externos• Carta original escrita por Christian Golbach para [[Euler (http:/ / www. math. dartmouth. edu/ ~euler/
correspondence/ letters/ OO0765. pdf)] (en alemán)]• Caldwell, Chris. « The Prime Glossary: Goldbach's conjecture (http:/ / primes. utm. edu/ glossary/ page.
php?sort=GoldbachConjecture)» (en inglés). The Prime Pages. Universidad de Tennessee.• Weisstein, Eric W. « Goldbach's conjecture (http:/ / mathworld. wolfram. com/ GoldbachConjecture. html)» (en
inglés). MathWorld. Wolfram Research.• Ahuja, Anjana (16 de marzo de 2000). « A million-dollar maths question (http:/ / www. times-archive. co. uk/
news/ pages/ tim/ 2000/ 03/ 16/ timfeafea02004. html)». The Times.• Revilla, Fernando (2007). ref. 702. « Conjetura de Goldbach y aritmética de Peano. Un enfoque de la Conjetura
de Goldbach por medio de procesos dinámicos (http:/ / www. caminos. upm. es/ matematicas/ maic/ congreso1/texto_programacion. htm)». Actas del Primer Congreso Internacional de Matemáticas en Ingeniería Civil yArquitectura, sección de desarrollos teóricos de la matemática aplicada: pp. 451-454. ISBN 978-84-7493-381-9.

Hipótesis de Lindelöf 134
Hipótesis de LindelöfEn matemática, la hipótesis de Lindelöf es una conjetura formulada por el matemático finés Ernst Leonard Lindelöf(véase Lindelöf (1908)) sobre la tasa de crecimiento de la función zeta de Riemann en la línea crítica y que estáimplicada por la hipótesis de Riemann.Ésta postula que, para cualquier ε > 0,
cuando t tiende a infinito (véase notación de Landau). Puesto que ε puede ser reemplazado por un valor menor, estaconjetura también puede postularse como:Para cualquier número real positivo ε,
La función μSi σ es real, entonces μ(σ) se define como el ínfimo de todos los números reales a tales que ζ(σ + iT) = O(T a). Estrivial el observar que μ(σ) = 0 para σ > 1, y la ecuación funcional de la función zeta implica que μ(1 − σ) =μ(σ) − σ + 1/2. El teorema de Phragmen–Lindelöf implica también que μ es convexa. La hipótesis de Lindelöfasegura que μ(1/2) = 0, lo que junto con las propiedades citadas antes de μ implican que μ(σ) es 0 para σ ≥ 1/2 y1/2 − σ para σ ≤ 1/2.El resultado de convexidad de Lindelöf junto con μ(1) = 0 y μ(0) = 1/2 implican que 0 ≤ μ(1/2) ≤ 1/4. El límitesuperior de 1/4 fue rebajado por Hardy y Littlewood a 1/6 mediante la aplicación del método de Weyl de estimaciónde sumas exponenciales para la ecuación funcional aproximada de la función zeta. Desde entonces, este límite hasido rebajado significativamente a una cantidad menor que 1/6 por varios autores, usando largas y complejasdemostraciones, como indica la siguiente tabla:
μ(1/2) ≤ μ(1/2) ≤ Autor
1/4 0.25 Lindelöf (1908) Límite de convexidad
1/6 0.1667 Hardy y Littlewood (?)
163/988 0.1650 Walfisz (1924)
27/164 0.1647 Titchmarsh (1932)
229/1392 0.164512 Phillips (1933)
0.164511 Rankin (1955)
19/116 0.1638 Titchmarsh (1942)
15/92 .1631 Min (1949)
6/37 .16217 Haeneke (1962)
173/1067 0.16214 Kolesnik (1973)
35/216 0.16204 Kolesnik (1982)
139/858 0.16201 Kolesnik (1985)
32/205 0.1561 Huxley (2002),2005

Hipótesis de Lindelöf 135
Relación con la hipótesis de RiemannBacklund (1918-1919) mostró que la hipótesis de Lindelöf es equivalente al siguiente enunciado sobre los ceros de lafunción zeta:Para cada ε > 0, el número de ceros con parte real al menos 1/2 + ε y la parte imaginaria T y T + 1 es o(log(T))cuando T tiende a infinito. La hipótesis de Riemann implica que no hay ningún cero en esa región, así pues implica ala hipótesis de Lindelöf. Se sabe que el número de ceros con parte imaginaria T y T + 1 es O(log(T)), así que lahipótesis de Lindelöf parece sólo un poco más fuerte que lo que ya ha sido demostrado, pero a pesar de ello, sigueresistiendo a todos los intentos de demostración, siendo éstos ya muy complicados.
Media de las potencias de la función zetaLa hipótesis de Lindelöf es equivalente a la afirmación de que
para todos los enteros positivos k y para todos los números reales positivos ε. Esta afirmación ha sido demostradapara k = 1 o 2, pero el caso k = 3 parece ser más complejo y todavía se encuentra como un problema abierto.Hay una más precisa conjetura acerca del comportamiento asintótico de esta integral: Se cree que
para algunas constantes ck,j. Esto fue demostrado por John Edensor Littlewood para k = 1 y por Heath-Brown (1979)para k = 2 (extendiendo un resultado de Ingham (1926) el cual encontró el término principal).
Conrey y Ghosh (1998) sugirió el valor para el coeficiente
principal cuando k es 6, y Keating y Snaith (2000) usaron teoría de matrices aleatorias para sugerir algunasconjeturas sobre los valores de los coeficientes para valores de k mayores. Los coeficientes principales ha sidoconjeturados para ser el producto de un factor elemental, un cierto producto sobre números primos, y el número de npor n en tabla de Young dado por la siguiente secuencia:• 1, 1, 2, 42, 24024, 701149020, (sucesión A039622 [1] en OEIS).
Otras consecuenciasDenotando como pn el n-ésimo número primo, un resultado dado por Albert Ingham, muestra que la hipótesis deLindelöf implica que, para cualquier ε > 0,
si n es lo suficientemente grande. Sin embargo, este resultado es mucho peor que la amplia conjetura del espacioentre primos consecutivos.
Referencias• Backlund, R. (1918–1919), «Über die Beziehung zwischen Anwachsen und Nullstellen der Zeta-Funktion»,
Ofversigt Finska Vetensk. Soc. 61 (9)• Conrey, J. B.; Farmer, D. W.; Keating, Jonathan P.; Rubinstein, M. O.; Snaith, N. C. (2005), «Integral moments
of L-functions», Proceedings of the London Mathematical Society. Third Series 91 (1): 33–104, doi:
10.1112/S0024611504015175 [2], MR 2149530 [3], ISSN 0024-6115 [4]
• Conrey, J. B.; Farmer, D. W.; Keating, Jonathan P.; Rubinstein, M. O.; Snaith, N. C. (2008), «Lower order terms in the full moment conjecture for the Riemann zeta function», Journal of Number Theory 128 (6): 1516–1554, doi:
Hipótesis de Lindelöf 136
10.1016/j.jnt.2007.05.013 [5], MR 2419176 [6], ISSN 0022-314X [7]
• Conrey, J. B.; Ghosh, A. (1998), «A conjecture for the sixth power moment of the Riemann zeta-function»,International Mathematics Research Notices 1998 (15): 775–780, doi: 10.1155/S1073792898000476 [8], MR 1639551 [9],ISSN 1073-7928 [10]
• Edwards, H. M. (1974), Riemann's Zeta Function, New York: Dover Publications, MR 0466039 [11], ISBN
978-0-486-41740-0
• Heath-Brown, D. R. (1979), «The fourth power moment of the Riemann zeta function», Proceedings of theLondon Mathematical Society. Third Series 38 (3): 385–422, doi: 10.1112/plms/s3-38.3.385 [12], MR 532980 [13], ISSN
0024-6115 [4]
• Huxley, M. N. (2002), «Integer points, exponential sums and the Riemann zeta function», Number theory for themillennium, II (Urbana, IL, 2000), A K Peters, pp. 275–290, MR 1956254 [14]
• Huxley, M. N. (2005), «Exponential sums and the Riemann zeta function. V», Proceedings of the LondonMathematical Society. Third Series 90 (1): 1–41, doi: 10.1112/S0024611504014959 [15], MR 2107036 [16], ISSN 0024-6115[4]
• Ingham, A. E. (1928), «Mean-Value Theorems in the Theory of the Riemann Zeta-Function», Proc. London Math.Soc. s2-27: 273–300, doi: 10.1112/plms/s2-27.1.273 [17]
• Ingham, A. E. (1940), «On the estimation of N(σ,T)», The Quarterly Journal of Mathematics. Oxford. SecondSeries 11: 291–292, doi: 10.1093/qmath/os-11.1.201 [18], MR 0003649 [19], ISSN 0033-5606 [20]
• Karatsuba, A. A.; Voronin, S. M. (1992), The Riemann zeta-function, de Gruyter Expositions in Mathematics, 5,Berlin: Walter de Gruyter & Co., MR 1183467 [21], ISBN 978-3-11-013170-3
• Keating, Jonathan P.; Snaith, N. C. (2000), «Random matrix theory and ζ(1/2+it)», Communications inMathematical Physics 214 (1): 57–89, doi: 10.1007/s002200000261 [22], MR 1794265 [23], ISSN 0010-3616 [24]
• Lindelöf, Ernst (1908), «Quelques remarques sur la croissance de la fonction ζ(s)», Bull. Sci. Math. 32: 341–356• Motohashi, Yõichi (1995), «A relation between the Riemann zeta-function and the hyperbolic Laplacian [25]»,
Annali della Scuola Normale Superiore di Pisa. Classe di Scienze. Serie IV 22 (2): 299–313, MR 1354909 [26], ISSN
0391-173X [27]
• Motohashi, Yõichi (1995), «The Riemann zeta-function and the non-Euclidean Laplacian», Sugaku Expositions 8(1): 59–87, MR 1335956 [28], ISSN 0898-9583 [29]
• Titchmarsh, Edward Charles (1986), The theory of the Riemann zeta-function (2nd edición), The Clarendon PressOxford University Press, MR 882550 [30], ISBN 978-0-19-853369-6
• «Lindelöf hypothesis [31]» (en inglés). Encyclopaedia of Mathematics. Springer. Consultado el 13 de noviembrede 2010.
Referencias[1] http:/ / oeis. org/ A039622[2] http:/ / dx. doi. org/ 10. 1112%2FS0024611504015175[3] http:/ / www. ams. org/ mathscinet-getitem?mr=2149530[4] http:/ / worldcat. org/ issn/ 0024-6115[5] http:/ / dx. doi. org/ 10. 1016%2Fj. jnt. 2007. 05. 013[6] http:/ / www. ams. org/ mathscinet-getitem?mr=2419176[7] http:/ / worldcat. org/ issn/ 0022-314X[8] http:/ / dx. doi. org/ 10. 1155%2FS1073792898000476[9] http:/ / www. ams. org/ mathscinet-getitem?mr=1639551[10] http:/ / worldcat. org/ issn/ 1073-7928[11] http:/ / www. ams. org/ mathscinet-getitem?mr=0466039[12] http:/ / dx. doi. org/ 10. 1112%2Fplms%2Fs3-38. 3. 385[13] http:/ / www. ams. org/ mathscinet-getitem?mr=532980[14] http:/ / www. ams. org/ mathscinet-getitem?mr=1956254[15] http:/ / dx. doi. org/ 10. 1112%2FS0024611504014959[16] http:/ / www. ams. org/ mathscinet-getitem?mr=2107036
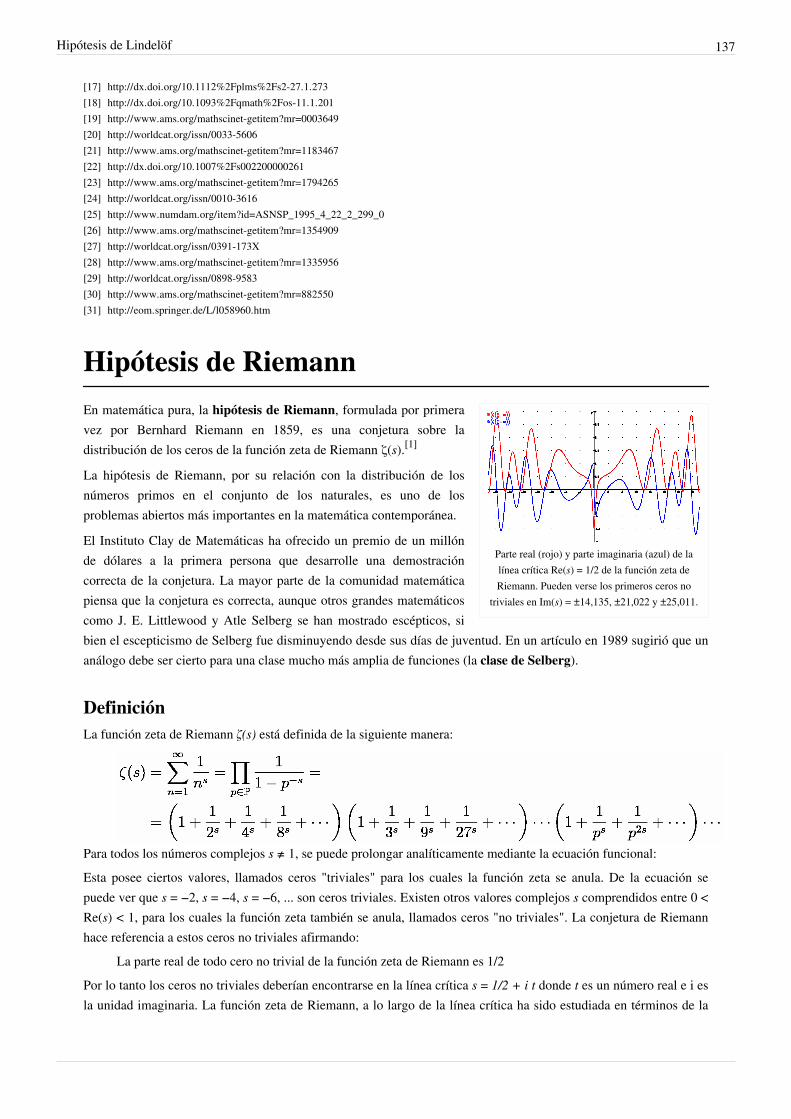
Hipótesis de Lindelöf 137
[17] http:/ / dx. doi. org/ 10. 1112%2Fplms%2Fs2-27. 1. 273[18] http:/ / dx. doi. org/ 10. 1093%2Fqmath%2Fos-11. 1. 201[19] http:/ / www. ams. org/ mathscinet-getitem?mr=0003649[20] http:/ / worldcat. org/ issn/ 0033-5606[21] http:/ / www. ams. org/ mathscinet-getitem?mr=1183467[22] http:/ / dx. doi. org/ 10. 1007%2Fs002200000261[23] http:/ / www. ams. org/ mathscinet-getitem?mr=1794265[24] http:/ / worldcat. org/ issn/ 0010-3616[25] http:/ / www. numdam. org/ item?id=ASNSP_1995_4_22_2_299_0[26] http:/ / www. ams. org/ mathscinet-getitem?mr=1354909[27] http:/ / worldcat. org/ issn/ 0391-173X[28] http:/ / www. ams. org/ mathscinet-getitem?mr=1335956[29] http:/ / worldcat. org/ issn/ 0898-9583[30] http:/ / www. ams. org/ mathscinet-getitem?mr=882550[31] http:/ / eom. springer. de/ L/ l058960. htm
Hipótesis de Riemann
Parte real (rojo) y parte imaginaria (azul) de lalínea crítica Re(s) = 1/2 de la función zeta deRiemann. Pueden verse los primeros ceros no
triviales en Im(s) = ±14,135, ±21,022 y ±25,011.
En matemática pura, la hipótesis de Riemann, formulada por primeravez por Bernhard Riemann en 1859, es una conjetura sobre ladistribución de los ceros de la función zeta de Riemann ζ(s).[1]
La hipótesis de Riemann, por su relación con la distribución de losnúmeros primos en el conjunto de los naturales, es uno de losproblemas abiertos más importantes en la matemática contemporánea.
El Instituto Clay de Matemáticas ha ofrecido un premio de un millónde dólares a la primera persona que desarrolle una demostracióncorrecta de la conjetura. La mayor parte de la comunidad matemáticapiensa que la conjetura es correcta, aunque otros grandes matemáticoscomo J. E. Littlewood y Atle Selberg se han mostrado escépticos, sibien el escepticismo de Selberg fue disminuyendo desde sus días de juventud. En un artículo en 1989 sugirió que unanálogo debe ser cierto para una clase mucho más amplia de funciones (la clase de Selberg).
DefiniciónLa función zeta de Riemann ζ(s) está definida de la siguiente manera:
Para todos los números complejos s ≠ 1, se puede prolongar analíticamente mediante la ecuación funcional:Esta posee ciertos valores, llamados ceros "triviales" para los cuales la función zeta se anula. De la ecuación sepuede ver que s = −2, s = −4, s = −6, ... son ceros triviales. Existen otros valores complejos s comprendidos entre 0 <Re(s) < 1, para los cuales la función zeta también se anula, llamados ceros "no triviales". La conjetura de Riemannhace referencia a estos ceros no triviales afirmando:
La parte real de todo cero no trivial de la función zeta de Riemann es 1/2Por lo tanto los ceros no triviales deberían encontrarse en la línea crítica s = 1/2 + i t donde t es un número real e i es la unidad imaginaria. La función zeta de Riemann, a lo largo de la línea crítica ha sido estudiada en términos de la
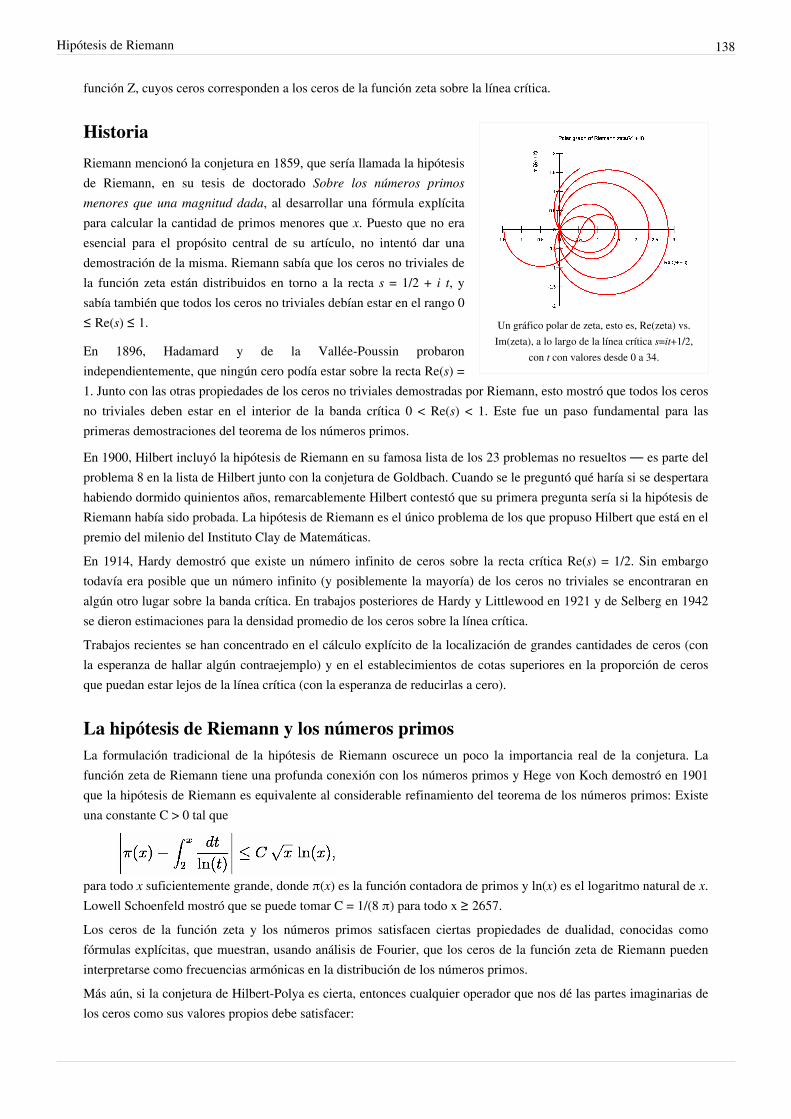
Hipótesis de Riemann 138
función Z, cuyos ceros corresponden a los ceros de la función zeta sobre la línea crítica.
Un gráfico polar de zeta, esto es, Re(zeta) vs.Im(zeta), a lo largo de la línea crítica s=it+1/2,
con t con valores desde 0 a 34.
Historia
Riemann mencionó la conjetura en 1859, que sería llamada la hipótesisde Riemann, en su tesis de doctorado Sobre los números primosmenores que una magnitud dada, al desarrollar una fórmula explícitapara calcular la cantidad de primos menores que x. Puesto que no eraesencial para el propósito central de su artículo, no intentó dar unademostración de la misma. Riemann sabía que los ceros no triviales dela función zeta están distribuidos en torno a la recta s = 1/2 + i t, ysabía también que todos los ceros no triviales debían estar en el rango 0≤ Re(s) ≤ 1.
En 1896, Hadamard y de la Vallée-Poussin probaronindependientemente, que ningún cero podía estar sobre la recta Re(s) =1. Junto con las otras propiedades de los ceros no triviales demostradas por Riemann, esto mostró que todos los cerosno triviales deben estar en el interior de la banda crítica 0 < Re(s) < 1. Este fue un paso fundamental para lasprimeras demostraciones del teorema de los números primos.
En 1900, Hilbert incluyó la hipótesis de Riemann en su famosa lista de los 23 problemas no resueltos — es parte delproblema 8 en la lista de Hilbert junto con la conjetura de Goldbach. Cuando se le preguntó qué haría si se despertarahabiendo dormido quinientos años, remarcablemente Hilbert contestó que su primera pregunta sería si la hipótesis deRiemann había sido probada. La hipótesis de Riemann es el único problema de los que propuso Hilbert que está en elpremio del milenio del Instituto Clay de Matemáticas.En 1914, Hardy demostró que existe un número infinito de ceros sobre la recta crítica Re(s) = 1/2. Sin embargotodavía era posible que un número infinito (y posiblemente la mayoría) de los ceros no triviales se encontraran enalgún otro lugar sobre la banda crítica. En trabajos posteriores de Hardy y Littlewood en 1921 y de Selberg en 1942se dieron estimaciones para la densidad promedio de los ceros sobre la línea crítica.Trabajos recientes se han concentrado en el cálculo explícito de la localización de grandes cantidades de ceros (conla esperanza de hallar algún contraejemplo) y en el establecimientos de cotas superiores en la proporción de cerosque puedan estar lejos de la línea crítica (con la esperanza de reducirlas a cero).
La hipótesis de Riemann y los números primosLa formulación tradicional de la hipótesis de Riemann oscurece un poco la importancia real de la conjetura. Lafunción zeta de Riemann tiene una profunda conexión con los números primos y Hege von Koch demostró en 1901que la hipótesis de Riemann es equivalente al considerable refinamiento del teorema de los números primos: Existeuna constante C > 0 tal que
para todo x suficientemente grande, donde π(x) es la función contadora de primos y ln(x) es el logaritmo natural de x.Lowell Schoenfeld mostró que se puede tomar C = 1/(8 π) para todo x ≥ 2657.Los ceros de la función zeta y los números primos satisfacen ciertas propiedades de dualidad, conocidas comofórmulas explícitas, que muestran, usando análisis de Fourier, que los ceros de la función zeta de Riemann puedeninterpretarse como frecuencias armónicas en la distribución de los números primos.Más aún, si la conjetura de Hilbert-Polya es cierta, entonces cualquier operador que nos dé las partes imaginarias delos ceros como sus valores propios debe satisfacer:
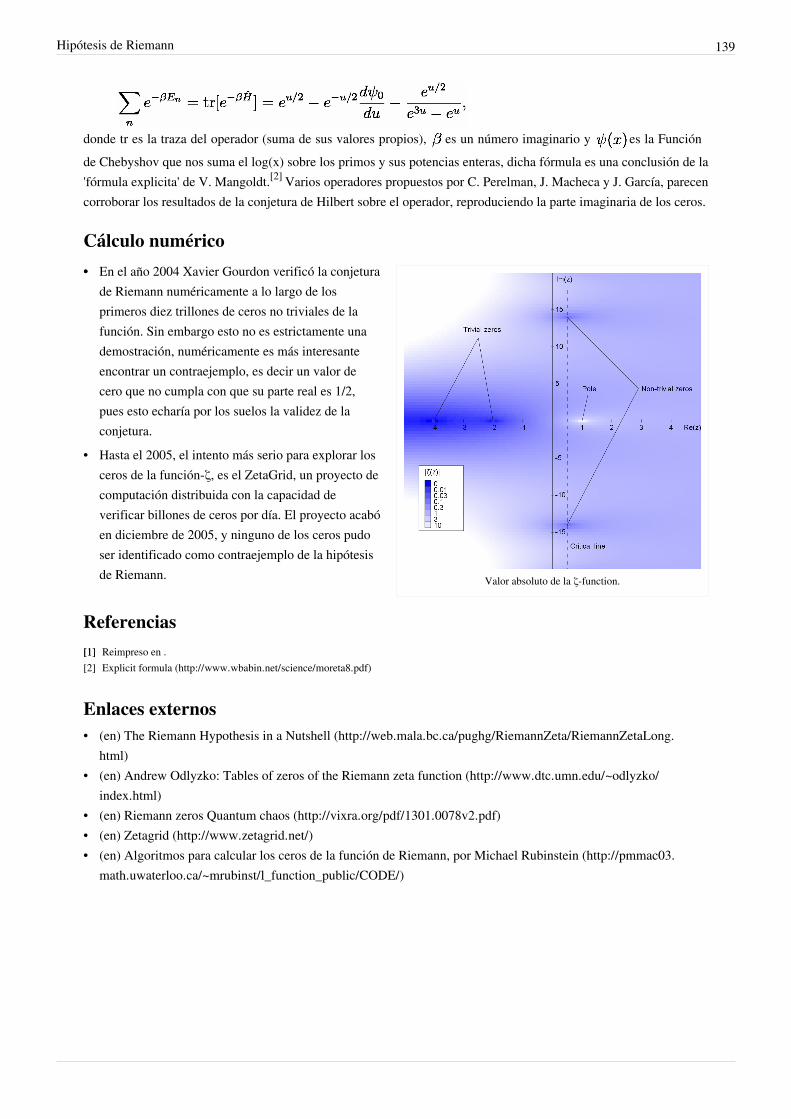
Hipótesis de Riemann 139
donde tr es la traza del operador (suma de sus valores propios), es un número imaginario y es la Funciónde Chebyshov que nos suma el log(x) sobre los primos y sus potencias enteras, dicha fórmula es una conclusión de la'fórmula explicita' de V. Mangoldt.[2] Varios operadores propuestos por C. Perelman, J. Macheca y J. García, parecencorroborar los resultados de la conjetura de Hilbert sobre el operador, reproduciendo la parte imaginaria de los ceros.
Cálculo numérico
Valor absoluto de la ζ-function.
•• En el año 2004 Xavier Gourdon verificó la conjeturade Riemann numéricamente a lo largo de losprimeros diez trillones de ceros no triviales de lafunción. Sin embargo esto no es estrictamente unademostración, numéricamente es más interesanteencontrar un contraejemplo, es decir un valor decero que no cumpla con que su parte real es 1/2,pues esto echaría por los suelos la validez de laconjetura.
• Hasta el 2005, el intento más serio para explorar losceros de la función-ζ, es el ZetaGrid, un proyecto decomputación distribuida con la capacidad deverificar billones de ceros por día. El proyecto acabóen diciembre de 2005, y ninguno de los ceros pudoser identificado como contraejemplo de la hipótesisde Riemann.
Referencias[1][1] Reimpreso en .[2] Explicit formula (http:/ / www. wbabin. net/ science/ moreta8. pdf)
Enlaces externos• (en) The Riemann Hypothesis in a Nutshell (http:/ / web. mala. bc. ca/ pughg/ RiemannZeta/ RiemannZetaLong.
html)• (en) Andrew Odlyzko: Tables of zeros of the Riemann zeta function (http:/ / www. dtc. umn. edu/ ~odlyzko/
index. html)• (en) Riemann zeros Quantum chaos (http:/ / vixra. org/ pdf/ 1301. 0078v2. pdf)• (en) Zetagrid (http:/ / www. zetagrid. net/ )• (en) Algoritmos para calcular los ceros de la función de Riemann, por Michael Rubinstein (http:/ / pmmac03.
math. uwaterloo. ca/ ~mrubinst/ l_function_public/ CODE/ )
Número de Giuga 140
Número de GiugaUn Número de Giuga es un número compuesto n tal que cada uno de sus factores primos pi es un divisor de
. Otra comprobación es si la congruencia es cierta, siendo B un número de
Bernoulli. Los números Giuga reciben su nombre del matemático Giuseppe Giuga, y se relacionan con su conjeturasobre los números primos.La secuencia de Giuga comienza con los números 30, 858, 1722, 66198, 2214408306... ((sucesión A007850 [1] enOEIS)).Por ejemplo, 30 es un número de Giuga porque sus factores primos son 2, 3 y 5, y se cumple que:•• 30/2 - 1 = 14, que es divisible por 2,•• 30/3 - 1 = 9, que es 3 al cuadrado, y•• 30/5 - 1 = 5, es decir, el propio tercer factor primo.
Los factores primos de un número de Giuga deben ser distintos. Si es divisor de , entonces se sigue que
, donde es divisible por . Por lo tanto, no sería divisible por , y por lo tanto
no sería un número de Giuga.Por ello, sólo los números libres de cuadrados pueden ser números de Giuga. Por ejemplo, los factores primos de 60son 2, 3 y 5, y 60/2 - 1 = 29, que no es divisible entre 2, por lo que 60 no es un número de Giuga. Tampoco losnúmeros semiprimos puede ser números de Giuga, porque si , con primos, entonces
, por lo que no será divisor de , y por lo tanto no será un número de
Giuga.Todos los números de Giuga conocidos por ahora son pares. Si existe un número de Giuga impar, tiene que ser elproducto de al menos 14 números primos. Se desconoce si hay infinitos números de Giuga.Paolo P. Lava (2009) ha conjecturado que los números de Giuga son la solución de la ecuación n'=n+1 siendo n' laderivada aritmética de n.Es fácil demostrar que si un numero cumple la equacion n'=n+1 entonces es un numero de Giuga. Por otro ladotambién se puede demostrar que los numeros de Giuga que descomponen en menos de 59 factores primos sonsolución de la equacion n'=n+1.
Referencias• Borwein, D.; Borwein, J. M.; Borwein, P. B. y Girgensohn, R. "Giuga's Conjecture on Primality." American
Mathematical Monthly 103, pp. 40-50, 1996.•• Giorgio Balzarotti, Paolo P. Lava - "103 curiosità matematiche", Hoepli, Milan 2010
Referencias[1] http:/ / oeis. org/ A007850
Número cuasiperfecto 141
Número cuasiperfectoUn número cuasiperfecto es un número natural hipotético n, donde la suma de todos sus divisores positivos (lafunción suma de divisores σ(n)) es igual a 2n + 1. Los números cuasiperfectos son números abundantes.No se conoce la existencia de algún número cuasiperfecto, pero si existiera, debe ser un cuadrado perfecto imparmayor a 1035 que tenga por lo menos siete factores primos distintos.
Notas
Referencias• « Quasiperfect numbers (http:/ / matwbn. icm. edu. pl/ ksiazki/ aa/ aa22/ aa2245. pdf)» (en inglés). Acta Arithm.
22: pp. 439-447. 1973.• « Odd integers N with five distinct prime factors for which 2−10−12 < σ(N)/N < 2+10−12 (http:/ / www. ams. org/
journals/ mcom/ 1978-32-141/ S0025-5718-1978-0485658-X/ S0025-5718-1978-0485658-X. pdf)» (en inglés).Mathematics of Computation 32: pp. 303-309. 1978. ISSN 0025-5718 (http:/ / worldcat. org/ issn/ 0025-5718).
• «On odd perfect numbers (ii), multiperfect numbers and quasiperfect numbers» (en inglés). J. Austral. Math. Soc.,Ser. A 29: pp. 369-384. 1980. doi: 10.1017/S1446788700021376 (http:/ / dx. doi. org/ 10. 1017/ S1446788700021376).ISSN 0263-6115 (http:/ / worldcat. org/ issn/ 0263-6115).
• James J. Tattersall (1999). Elementary number theory in nine chapters. Cambridge University Press. pp. 147. ISBN
0-521-58531-7.• Sándor, József; Mitrinović, Dragoslav S.; Crstici, Borislav, eds (2006). Handbook of number theory I. Dordrecht:
Springer-Verlag. pp. 109–110. ISBN 1-4020-4215-9.
Enlaces externos• Esta obra deriva de la traducción de Quasiperfect number, publicada bajo la Licencia de documentación libre de
GNU y la Licencia Creative Commons Atribución-CompartirIgual 3.0 Unported por editores de la Wikipedia eninglés.
http://www.ams.org/journals/mcom/1978-32-141/S0025-5718-1978-0485658-X/S0025-5718-1978-0485658-X.pdf

Problema de Galois inverso 142
Problema de Galois inverso
Problemas no resueltos de la matemática: Todo polinomio con coeficientes racionales lleva asociado un grupo de Galois, pero ¿es cierto
que todo grupo finito es grupo de Galois de algún polinomio?
En teoría de Galois, el problema de Galois inverso plantea si todo grupo finito puede ser el grupo de Galois dealguna extensión de los números racionales. Este problema, propuesto inicialmente por Hilbert en el siglo XIX,[1]
permanece sin resolver.Más generalmente, sea un grupo finito dado, y sea un cuerpo. Entonces la pregunta es: ¿existe una extensiónde cuerpos galoisiana tal que el grupo de Galois de la extensión sea isomorfo a ? Se dice que esrealizable sobre si dicho cuerpo existe.
Resultados parcialesPese a ser un problema abierto, se conocen muchos detalles sobre algunos casos particulares. Se sabe, por ejemplo(Šafarevič), que todo grupo finito es realizable sobre cualquier cuerpo de funciones en una variable sobre losnúmeros complejos , y más generalmente sobre cuerpos de funciones en una variable sobre cualquier cuerpoalgebraicamente cerrado de característica cero. Šafarevič mostró que todo grupo finito resoluble es realizable sobre
. También se sabe que los 26 grupos esporádicos, a excepción del grupo de Mathieu , son realizables sobre
.Hilbert había mostrado que esta cuestión está relacionada con una pregunta de racionalidad para : si es unaextensión cualquiera de , en la que actúa como grupo de automorfismos y el cuerpo fijo por , , esracional sobre , entonces es realizable sobre . Aquí «racional» significa que es una extensión puramentetrascendental de , generada por un conjunto algebraicamente independiente. Este criterio puede, por ejemplo,emplearse para demostrar que todos los grupos simétricos son realizables.Se ha profundizado mucho en esta cuestión, para la que aún no existe una resolución general. Algunos de los trabajosllevados a cabo se basan en construir geométricamente como un recubrimiento de Galois de la recta proyectiva:en términos algebraicos, empezar con una extensión del cuerpo de funciones racionales en una indeterminada
; después aplicar el teorema de irreducibilidad de Hilbert para especializar , de tal manera que se conserve sugrupo de Galois.
Un ejemplo sencillo: los grupos cíclicosEs posible, mediante resultados clásicos, construir explícitamente un polinomio cuyo grupo de Galois sobre seael grupo cíclico para cualquier positivo. Para hacer esto, elíjase un primo tal que ; esto es posible por el teorema de Dirichlet. Sea la extensión ciclotómica de generada por , donde es una raíz p-ésima primitiva de la unidad; el grupo de Galois de es cíclico de orden .Puesto que divide a , el grupo de Galois tiene un subgrupo cíclico de orden . El teoremafundamental de la teoría de Galois implica que el correspondiente cuerpo fijo por
tiene grupo de Galois sobre . Tomando las sumas de conjugados de apropiadas, de acuerdo con laconstrucción de períodos de Gauss, se puede encontrar un elemento de que genera sobre , y calcular supolinomio mínimo.Este método puede extenderse para abarcar todos los grupos abelianos finitos, ya que cada uno de ellos aparece dehecho como cociente del grupo de Galois de alguna extensión ciclotómica de . (Esta afirmación no debeconfundirse con el teorema de Kronecker-Weber, un resultado mucho más profundo.)

Problema de Galois inverso 143
Ejemplo elaborado: el grupo cíclico de orden tres
Para , podemos tomar . En ese caso es cíclico de orden seis. Tomemos el generadorde este grupo que manda a . Estamos interesados en el subgrupo de orden dos.
Considérese el elemento . Por construcción, queda fijo por , y sólo tiene tres conjugadossobre , dados por
.Usando la identidad , encontramos que
,, y
.Por lo tanto es una raíz del polinomio
,que en consecuencia tiene grupo de Galois sobre .
Grupos simétricos y alternadosHilbert demostró que todos los grupos simétricos y alternados son grupos de Galois de polinomios con coeficientesracionales.Por ejemplo, el polinomio tiene discriminante
.Consideremos el caso especial
.Sustituyendo un entero primo por en se obtiene como resultado un polinomio (llamado «especialización»de ) que es irreducible por el criterio de Eisenstein. Por tanto debe ser irreducible sobre .Más aún, puede escribirse de la forma
y así puede factorizarse como:,
cuyo segundo factor es irreducible por el criterio de Eisenstein. Acabamos de demostrar que el grupoes doblemente transitivo.
Podemos ahora deducir que este grupo de Galois contiene una trasposición. Usando el escalado se obtiene
y mediante se obtiene ahora,
que puede reescribirse como
.Entonces tiene 1 como raíz doble y sus otras raíces son simples, lo que implica que existe unatransposición en . Cualquier grupo de permutaciones doblemente transitivo que contenga unatrasposición es un grupo simétrico completo.El teorema de irreducibilidad de Hilbert implica entonces que un conjunto infinito de números racionales dan especializaciones de cuyos grupos de Galois son sobre . De hecho este conjunto de racionales es

Problema de Galois inverso 144
denso en .
El discriminante de es igual a
,que no es, en general, un cuadrado perfecto.
Grupos alternadosLas soluciones para grupos alternados deben tratarse por separado para los grados par e impar. Sea
.Tras esta sustitución el discriminante de es igual a
,que es un cuadrado perfecto cuando es impar.En el caso par sea el recíproco de
,de donde se hace
,y el discriminante se hace
,que es un cuadrado perfecto cuando es par.De nuevo, el teorema de irreducibilidad de Hilbert implica la existencia de infinitas especializaciones cuyos gruposde Galois son grupos alternados.
Grupos rígidosSupongamos que son clases de conjugación de un grupo finito , y sea el conjunto de n-tuplas
de tales que está en y el producto es trivial. Entonces se dice que es rígido
si es no vacío, actúa transitivamente sobre él por conjugación, y cada elemento de genera .Thompson (1984) mostró que si un grupo finito posee un subgrupo rígido, entonces es muy posible que puedarealizarse como grupo de Galois sobre una extensión ciclotómica de los racionales.Esto puede usarse para mostrar que muchos grupos simples finitos, incluido el grupo simple monstruo, son grupos deGalois de extensiones de los racionales.El paradigma de la rigidez es el grupo simétrico , que está generado por un n-ciclo y una trasposición cuyoproducto es un (n−1)-ciclo. La construcción en la sección precedente hacía uso de estos generadores para determinarel grupo de Galois de un polinomio.
Una construcción mediante una función modular elípticaSea un entero mayor que 1. Un retículo Λ en el plano complejo de periodo contiene un subretículo Λ' deperiodo . Este último pertenece al conjunto finito de subretículos permutados por el grupo modular PSL(2,Z),que se basa en cambios de base para Λ. Sea la función modular elíptica de Klein. Definamos el polinomio como el producto de las diferencias sobre los subretículos conjugados. Como polinomio en , tiene coeficientes que son polinomios sobre en .En los retículos conjugados, el grupo modular actúa como PGL(2,Zn). Se sigue que tiene grupo de Galoisisomorfo a PGL(2,Zn) sobre .

Problema de Galois inverso 145
El teorema de irreducibilidad de Hilbert permite obtener un conjunto infinito (y denso) de números racionales queespecializan a polinomios con grupo de Galois PGL(2,Zn) sobre . Los grupos PGL(2,Zn) incluyen infinitosgrupos no resolubles.
Notas al pie[1][1] Vila, 1992.
Referencias• Malle, Gunter; B. Heinrich Matzat (1999) (en inglés). Inverse Galois Theory (1ª edición). Berlín, Heidelberg:
Springer-Verlag. pp. 460. ISBN 3-540-62890-8.• Schneps, Leila; Pierre Lochak (1997). London Mathematical Society. ed (en inglés). Geometric Galois Actions. 2.
The Inverse Galois Problem, Moduli Spaces and Mapping Class Groups (1ª edición). Cambridge: CambridgeUniversity Press. pp. 360. ISBN 0-521-59641-6.
• Vila, Núria (1992). « On the inverse problem of Galois theory (http:/ / dmle. cindoc. csic. es/ pdf/PUBLICACIONSMATEMATIQUES_1992_36_2B_21. pdf)» (en inglés). Publicacions Matemàtiques 36 (2B): pp. 1053-1073. Consultado el 6-4-2010.
• Völklein, Helmut (1996). Cambridge Studies in Advanced Mathematics. ed (en inglés). Groups as GaloisGroups: an introduction (1ª edición). Cambridge: Cambridge University Press. pp. 276. ISBN 0-521-56280-5.
Problema del círculo de GaussEn matemática, el problema del círculo de Gauss es el problema de determinar cuántos puntos reticulares hay enun círculo centrado en el origen y con radio r. El primer progreso realizado para obtener la solución fue hecho porCarl Friedrich Gauss, y de ahí su nombre.
El problemaConsidérese un círculo en R2 con centro en el origen y radio r ≥ 0. el problema del círculo de Gauss preguntacuántos puntos hay dentro del círculo de la forma (m,n) donde m y n son ambos enteros. Puesto que la ecuación deeste círculo está dada en coordenadas cartesianas por x2 + y2 = r2, la cuestión es equivalente a preguntar cuántospares de enteros m y n hay, tales que
Si la respuesta dada para r se denota por N(r), entonces la siguiente lista muestra unos pocos valores de N(r) para rentero entre 0 y 10:
1, 5, 13, 29, 49, 81, 113, 149, 197, 253, 317 (sucesión A000328 [1] en OEIS).

Problema del círculo de Gauss 146
Acotaciones de la solución y conjeturaEl área de un círculo de radio r viene dada por πr2, y puesto que un cuadrado de área 1 en R2 contiene un puntoentero solamente, la respuesta esperada al problema podría ser sobre πr2. De hecho, podría ser ligeramente mayorque eso, puesto que los círculos son más eficientes al encerrar espacios que los cuadrados. Así que, en efecto, sepodría esperar que
para algún término de E(r). El encontrar un límite superior correcto para E(r) es pues, la forma que ha tomado elproblema.Gauss logró demostrar que[2] que
Hardy[3] e, independientemente, Landau encontraron un límite inferior al mostrar que
usando la notación o minúscula. Se conjetura que el correcto valor del límite es[4]
Escribiendo |E(r)| ≤ Crt, los actuales límites en t son
con el límite inferior de Hardy y Landau de 1915, y el límite superior demostrado por Huxley en el año 2000.[5]
En 2007, Sylvain Cappell y Julius Shaneson publicaron un artículo en arXiv asegurando demostrar el límite deO(r1/2+ε).[6] Kannan Soundararajan reseñó haber encontrado un error en la demostración.
Formas exactasEl valor de N(r) puede ser dado mediante varias series. En términos de una suma que hace uso de la función piso, sepuede expresar como:[7]
Una suma mucho más simple aparece si la función suma de cuadrados r2(n) es definida como el número de vías deescribir el número n como la suma de dos cuadrados. Entonces
GeneralizacionesAunque el problema original pregunta por el retículo de puntos enteros en un círculo, no hay razón para noconsiderar otras formas o cónicas, de hecho, el problema del divisor de Dirichlet es el problema equivalente, dondeel círculo es reemplazado por la hipérbola rectangular. Similarmente, se podría extender la cuestión en dosdimensiones a dimensiones mayores (A00605 en 3, A055410 en 4, A055411 en 5, A005412 etc. en 6 y superiores),preguntándose por puntos enteros dentro de una esfera u otros objetos. Si se ignora la geometría y meramente se leconsidera un problema algebraico de inecuaciones diofánticas, entonces se podría incrementar los exponentes queaparecen en el problema de cuadrados a cubos o mayores.

Problema del círculo de Gauss 147
El problema del círculo primitivoOtra generalización es la de calcular el número de soluciones enteras coprimas m, n a la ecuación
Este problema es conocido como problema del círculo primitivo, como tal, involucra la búsqueda de solucionesprimitivas al problema del círculo original.[8] Si el número de tales soluciones se denota por V(r), entonces losvalores de V(r) para r tomando valores desde 0 en adelante son (A175341)
Usando las mismas ideas que en el problema del círculo de Gauss usual, y el hecho de que la probabilidad de que dosenteros sean coprimos es 6/π2, es relativamente sencillo mostrar que
Como con el problema del círculo usual, la parte problemática del problema del círculo primitivo es la reducción delexponente en el término de error. Actualmente, el mejor exponente conocido es 221/304 + ε si se asume la hipótesisde Riemann. De otra manera, no se puede demostrar incondicionalmente la existencia de exponentes menores queuno.[9]
Referencias[1] http:/ / oeis. org/ A000328[2] G.H. Hardy, Ramanujan: Twelve Lectures on Subjects Suggested by His Life and Work, 3rd ed. New York: Chelsea, (1999), p.67.[3] G.H. Hardy, On the Expression of a Number as the Sum of Two Squares, Quart. J. Math. 46, (1915), pp.263–283.[4] R.K. Guy, Unsolved problems in number theory, Third edition, Springer, (2004), pp.365–366.[5] M.N. Huxley, Integer points, exponential sums and the Riemann zeta function, Number theory for the millenium, II (Urbana, IL, 2000)
pp.275–290, A K Peters, Natick, MA, 2002, .[6] S. Cappell and J. Shaneson, Some Problems in Number Theory I: The Circle Problem, , (2007).[7] D. Hilbert and S. Cohn-Vossen, Geometry and the Imagination, New York: Chelsea, (1999), pp.33–35.[8] J. Wu, On the primitive circle problem, Monatsh. Math. 135 (2002), pp.69–81.[9] W.G. Zhai, X.D. Cao, On the number of coprime integer pairs within a circle, Acta Arith. 90 (1999), pp.1–16.
Enlaces externos• Weisstein, Eric W. « Gauss's circle problem (http:/ / mathworld. wolfram. com/ GausssCircleProblem. html)» (en
inglés). MathWorld. Wolfram Research.
Problemas de Hilbert 148
Problemas de HilbertLos problemas de Hilbert conforman una lista de 23 problemas matemáticos compilados por el matemático alemánDavid Hilbert para la conferencia en París del Congreso Internacional de Matemáticos de 1900. Los problemasestaban todos por resolver en aquel momento, y varios resultaron ser muy influyentes en la matemática del siglo XX.Hilbert presentó diez de los problemas (1, 2, 6, 7, 8, 13, 16, 19, 21 y 22) en la conferencia, en un acto el 8 de agostoen La Sorbona. La lista completa se publicó más adelante.
Naturaleza e influencia de los problemasAunque se han producido intentos de repetir el éxito de la lista de Hilbert, ningún otro conjunto tan variado deproblemas o conjeturas ha tenido un efecto comparable en el desarrollo del tema y obtenido una fracción importantede su celebridad. Por ejemplo, las conjeturas de André Weil son famosas pero fueron poco publicitadas. Quizá supropio temperamento evitó que él intentase ponerse en posición de competir con Hilbert. John von Neumann produjouna lista, pero no obtuvo reconocimiento universal.A primera vista, este éxito podría atribuirse a la eminencia del autor de los problemas. Hilbert estaba en la cúspide desu poder y reputación en aquel momento y continuó dirigiendo la sobresaliente escuela de matemática en laUniversidad de Göttingen. Un examen más cuidadoso revela que el asunto no es tan simple.La matemática de aquel tiempo era aún discursiva: la tendencia a sustituir palabras por símbolos y apelaciones a laintuición y conceptos mediante axiomática pura seguía subyugada, aunque se volvería fuerte durante la siguientegeneración. En 1900, Hilbert no pudo acudir a la teoría axiomática de conjuntos, la integral de Lebesgue, losespacios topológicos o la tesis de Church, que cambiarían sus respectivos campos de forma permanente. El análisisfuncional, fundado en cierto modo por el propio Hilbert como noción central de los testigos del espacio de Hilbert,no se había diferenciado aún del cálculo de variaciones; hay en la lista de problemas de matemática variacional, peronada, como podría asumirse inocentemente, sobre teoría espectral (el problema 19 tiene una conexión con lahipoelipticidad).La lista no fue predictiva en ese sentido: no consiguió plasmar o anticipar el fulgurante ascenso que experimentaríanla topología, la teoría de grupos y la teoría de la medida en el siglo XX, así como no previó la manera en que iba aavanzar la lógica matemática. Por tanto, su valor documental es el de ensayo: una visión parcial, personal. Sugierealgunos programas de investigación y algunas direcciones por seguir sin fin concreto.De hecho, muchas de las preguntas daban una falsa idea del matemático profesional del siglo XXI, o incluso de1950, en que la forma de una solución a una buena pregunta tomaría la forma de un artículo publicado en unapublicación matemática. Si este fuera el caso de todos los veintitrés problemas, se habría simplificado el comentariohasta el punto de poder dar una referencia a una revista, o considera la pregunta como abierta todavía. En algunoscasos el lenguaje usado por Hilbert se sigue considerando un tanto "negociable", en cuanto al significado real de laformulación del problema (en ausencia, repetimos, de fundamentos axiomáticos, basados en matemática pura,empezando con el propio trabajo de Hilbert sobre geometría euclidiana, pasando por el Principia Mathematica, yterminando con el grupo Bourbaki y el "terrorismo intelectual" para terminar el trabajo). Los problemas Primero yQuinto se encuentran, quizá sorprendentemente, en un estado de formulación de una claridad menos que total(véanse las notas). En casos como el Vigésimo, el problema se podría leer de forma razonable en una versión"interna", relativamente accesible, en la que el lector puede saber a qué estaba apuntando Hilbert; o como unapenumbra "externa" y especulativa.Dicho todo esto, por tanto, la razón más importante es la gran rapidez con la que aceptó la lista de Hilbert lacomunidad matemática de aquel momento (lo cual es una fórmula menos convencional que ahora, ya que porentonces habían pocos líderes investigadores, que generalmente se encontraban en unos pocos países europeos y seconocían todos entre ellos). Los problemas se estudiaron con gran atención; resolver uno labró reputaciones.
Problemas de Hilbert 149
El estilo fue al menos tan influyente como el contenido de los problemas. Hilbert solicitaba clarificaciones. Pidiósoluciones en principio a preguntas algorítmicas, no a algoritmos prácticos. Pidió un fortalecimiento de los cimientosde partes de la matemática que a los no practicantes aún se antojaban guiadas por intuiciones opacas (el cálculo deSchubert y la geometría enumerativa).Estas actitudes fueron adoptadas por muchos seguidores, aunque también fueron discutidas, y continúan siéndolo.Treinta años después, Hilbert había endurecido su postura: véase ignorabimus.
Los problemas como manifiesto de HilbertEstá bastante claro que la lista de problemas, y su forma de discusión, estaban pensadas para ser influyentes. Hilbertno falló a las expectativas de la academia Alemana en cuanto a construcción de imperios, verbo programático, yestablecimiento explícito de una dirección y reclamo de territorio para una escuela. Nadie habla ya de la 'escuela deHilbert' en esos términos; ni gozaron los problemas de Hilbert de su momento como si hizo el programa de Erlangende Felix Klein. Klein fue colega de Hilbert, y en comparación la lista de este último era mucho menos prescriptiva.Michael Atiyah ha caracterizado el programa de Erlangen como prematuro. Los problemas de Hilbert, por elcontrario, mostraron la capacidad del experto de buscar el momento adecuado.Si la 'escuela de Hilbert' tiene un significado, posiblemente se refiera a la teoría de operadores y al estilo de la físicateórica que tomó los volúmenes Hilbert-Courant como canónicos. Como se señaló antes, la lista no establecedirectamente problemas sobre teoría espectral. Tampoco le dio relevancia al álgebra conmutativa (entonces se laconocía como teoría de ideales), su contribución algebraica más importante y mayor preocupación en sus días de lateoría de invariantes; lo cual, podría decirse, habría estado más en la línea de Klein. Ni, al menos superficialmente,predicó contra Leopold Kronecker, el oponente de Georg Cantor, del que había aprendido mucho pero cuyasactitudes casi detestaba (como queda documentado en la biografía de Constance Reid). El lector podría extraeramplias conclusiones de la presencia de la teoría de conjuntos en cabeza en la lista.La teoría de funciones de variable compleja, la rama del análisis clásico que todo matemático puro debería conocer,está bastante olvidada: ni la conjetura de Bieberbach ni otra cuestión interesante, aparte de la hipótesis de Riemann.Uno de los objetivos estratégicos de Hilbert fue poner el álgebra conmutativa y la teoría de funciones complejas almismo nivel; esto, sin embargo, llevaría 50 años (y aún no ha resultado en un cambio de lugares).Hilbert tenía un pequeño grupo de pares: Adolf Hurwitz y Hermann Minkowski eran ambos amigos cercanos eiguales intelectuales. Hay un guiño a la geometría de números de Minkowski en el problema 18, y a su trabajo en lasformas cuadráticas en el problema 11. Hurwitz fue el gran desarrollador de la teoría de la superficie de Riemann.Hilbert usó la analogía del cuerpo de funciones, una guía a la teoría algebraica de números mediante el uso deanálogos geométricos, para desarrollar la teoría del cuerpo de clases dentro de su propia investigación, y esto quedareflejado en el problema 9, hasta cierto punto en el problema 12, y en los problemas 21 y 22. Por otro lado, el únicorival de Hilbert en 1900 era Henri Poincaré, y la segunda parte del problema 16 es una cuestión de sistemasdinámicos al estilo de Poincaré.
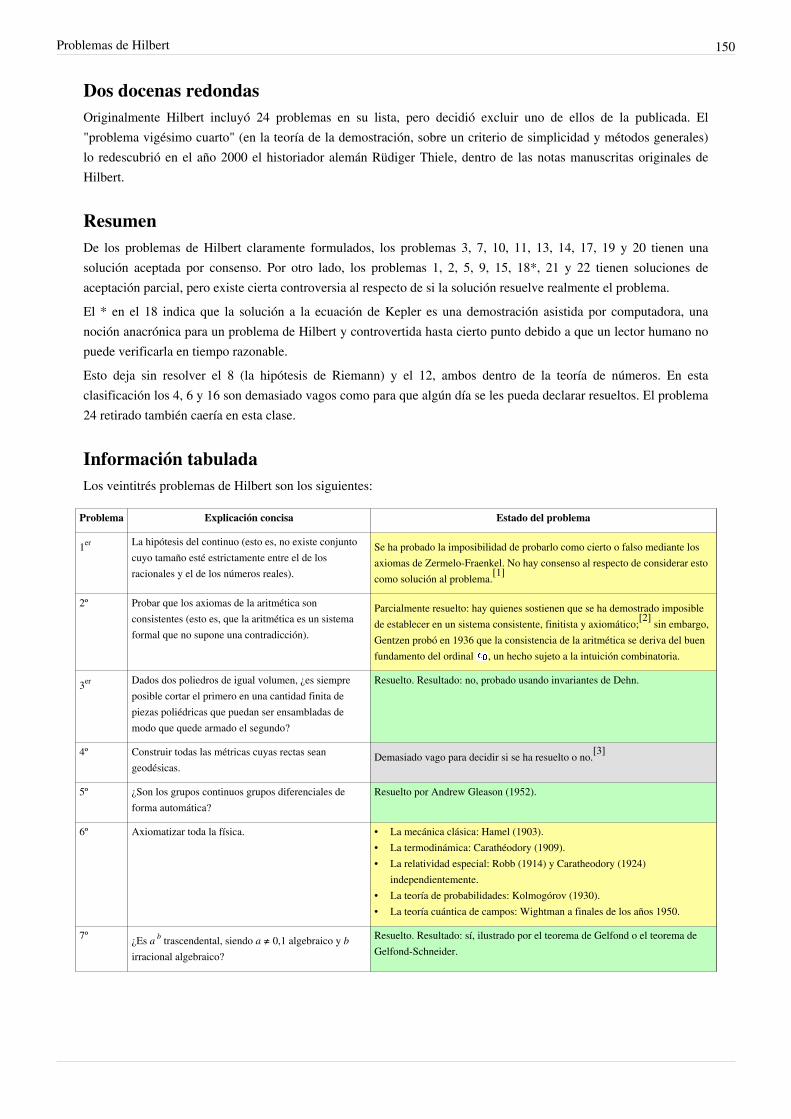
Problemas de Hilbert 150
Dos docenas redondasOriginalmente Hilbert incluyó 24 problemas en su lista, pero decidió excluir uno de ellos de la publicada. El"problema vigésimo cuarto" (en la teoría de la demostración, sobre un criterio de simplicidad y métodos generales)lo redescubrió en el año 2000 el historiador alemán Rüdiger Thiele, dentro de las notas manuscritas originales deHilbert.
ResumenDe los problemas de Hilbert claramente formulados, los problemas 3, 7, 10, 11, 13, 14, 17, 19 y 20 tienen unasolución aceptada por consenso. Por otro lado, los problemas 1, 2, 5, 9, 15, 18*, 21 y 22 tienen soluciones deaceptación parcial, pero existe cierta controversia al respecto de si la solución resuelve realmente el problema.El * en el 18 indica que la solución a la ecuación de Kepler es una demostración asistida por computadora, unanoción anacrónica para un problema de Hilbert y controvertida hasta cierto punto debido a que un lector humano nopuede verificarla en tiempo razonable.Esto deja sin resolver el 8 (la hipótesis de Riemann) y el 12, ambos dentro de la teoría de números. En estaclasificación los 4, 6 y 16 son demasiado vagos como para que algún día se les pueda declarar resueltos. El problema24 retirado también caería en esta clase.
Información tabuladaLos veintitrés problemas de Hilbert son los siguientes:
Problema Explicación concisa Estado del problema
1er La hipótesis del continuo (esto es, no existe conjuntocuyo tamaño esté estrictamente entre el de losracionales y el de los números reales).
Se ha probado la imposibilidad de probarlo como cierto o falso mediante losaxiomas de Zermelo-Fraenkel. No hay consenso al respecto de considerar estocomo solución al problema.[1]
2º Probar que los axiomas de la aritmética sonconsistentes (esto es, que la aritmética es un sistemaformal que no supone una contradicción).
Parcialmente resuelto: hay quienes sostienen que se ha demostrado imposiblede establecer en un sistema consistente, finitista y axiomático;[2] sin embargo,Gentzen probó en 1936 que la consistencia de la aritmética se deriva del buenfundamento del ordinal , un hecho sujeto a la intuición combinatoria.
3er Dados dos poliedros de igual volumen, ¿es siempreposible cortar el primero en una cantidad finita depiezas poliédricas que puedan ser ensambladas demodo que quede armado el segundo?
Resuelto. Resultado: no, probado usando invariantes de Dehn.
4º Construir todas las métricas cuyas rectas seangeodésicas.
Demasiado vago para decidir si se ha resuelto o no.[3]
5º ¿Son los grupos continuos grupos diferenciales deforma automática?
Resuelto por Andrew Gleason (1952).
6º Axiomatizar toda la física. • La mecánica clásica: Hamel (1903).• La termodinámica: Carathéodory (1909).• La relatividad especial: Robb (1914) y Caratheodory (1924)
independientemente.• La teoría de probabilidades: Kolmogórov (1930).• La teoría cuántica de campos: Wightman a finales de los años 1950.
7º ¿Es a b trascendental, siendo a ≠ 0,1 algebraico y birracional algebraico?
Resuelto. Resultado: sí, ilustrado por el teorema de Gelfond o el teorema deGelfond-Schneider.
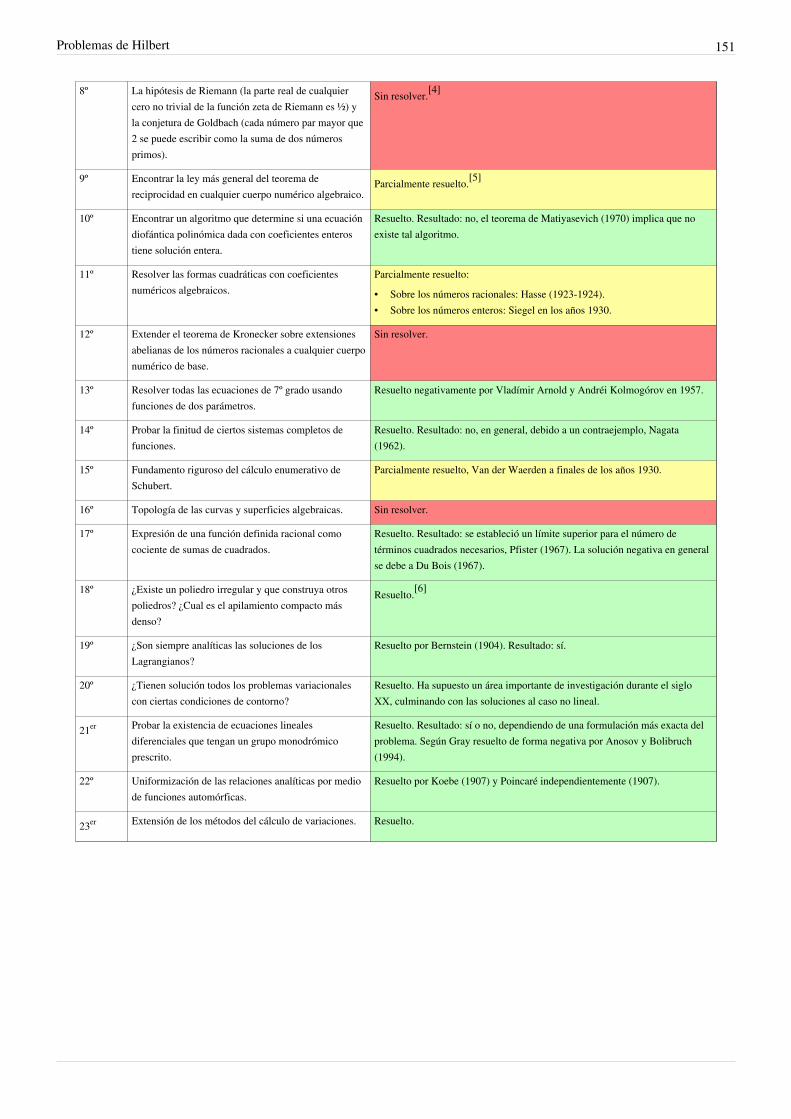
Problemas de Hilbert 151
8º La hipótesis de Riemann (la parte real de cualquiercero no trivial de la función zeta de Riemann es ½) yla conjetura de Goldbach (cada número par mayor que2 se puede escribir como la suma de dos númerosprimos).
Sin resolver.[4]
9º Encontrar la ley más general del teorema dereciprocidad en cualquier cuerpo numérico algebraico.
Parcialmente resuelto.[5]
10º Encontrar un algoritmo que determine si una ecuacióndiofántica polinómica dada con coeficientes enterostiene solución entera.
Resuelto. Resultado: no, el teorema de Matiyasevich (1970) implica que noexiste tal algoritmo.
11º Resolver las formas cuadráticas con coeficientesnuméricos algebraicos.
Parcialmente resuelto:
• Sobre los números racionales: Hasse (1923-1924).• Sobre los números enteros: Siegel en los años 1930.
12º Extender el teorema de Kronecker sobre extensionesabelianas de los números racionales a cualquier cuerponumérico de base.
Sin resolver.
13º Resolver todas las ecuaciones de 7º grado usandofunciones de dos parámetros.
Resuelto negativamente por Vladímir Arnold y Andréi Kolmogórov en 1957.
14º Probar la finitud de ciertos sistemas completos defunciones.
Resuelto. Resultado: no, en general, debido a un contraejemplo, Nagata(1962).
15º Fundamento riguroso del cálculo enumerativo deSchubert.
Parcialmente resuelto, Van der Waerden a finales de los años 1930.
16º Topología de las curvas y superficies algebraicas. Sin resolver.
17º Expresión de una función definida racional comocociente de sumas de cuadrados.
Resuelto. Resultado: se estableció un límite superior para el número detérminos cuadrados necesarios, Pfister (1967). La solución negativa en generalse debe a Du Bois (1967).
18º ¿Existe un poliedro irregular y que construya otrospoliedros? ¿Cual es el apilamiento compacto másdenso?
Resuelto.[6]
19º ¿Son siempre analíticas las soluciones de losLagrangianos?
Resuelto por Bernstein (1904). Resultado: sí.
20º ¿Tienen solución todos los problemas variacionalescon ciertas condiciones de contorno?
Resuelto. Ha supuesto un área importante de investigación durante el sigloXX, culminando con las soluciones al caso no lineal.
21er Probar la existencia de ecuaciones linealesdiferenciales que tengan un grupo monodrómicoprescrito.
Resuelto. Resultado: sí o no, dependiendo de una formulación más exacta delproblema. Según Gray resuelto de forma negativa por Anosov y Bolibruch(1994).
22º Uniformización de las relaciones analíticas por mediode funciones automórficas.
Resuelto por Koebe (1907) y Poincaré independientemente (1907).
23er Extensión de los métodos del cálculo de variaciones. Resuelto.
Problemas de Hilbert 152
Notas al pie[1] Se suele citar el resultado de independencia de Cohen, mostrando que la hipótesis del continuo es independiente de ZFC (los axiomas de
Zermelo-Fraenkel, extendidos para incluir el axioma de elección) se cita a menudo para justificar que el primer problema ha sido resuelto. Unpunto de vista contemporáneo es que podría ser el caso de que la teoría de conjuntos debería tener axiomas adicionales, capaces de resolver lasituación.
[2] Asunto de opinión, no compartida por todos. El resultado de Gentzen muestra de forma bastante precisa cuánto hace falta asumir para probarque los axiomas de Peano son consistentes. Se sostiene de forma general que el teorema de la incompletitud de Gödel muestra que no haydemostración finitista de que los AP sean consistentes (aunque el propio Gödel rechazó haber hecho esta inferencia [se necesita mejorreferencia para esto, pero cf Dawson p.71ff "... Gödel creía también [como Hilbert] que ningún problema matemático quedaba más allá delalcance de la razón humana. Aun así sus resultados mostraron que el programa propuesto por Hilbert para validar esa creencia — su teoría dela demostración — no podría llevarse a cabo tal como quería Hilbert" (p.71) Véase también p.98ff para leer más sobre el 'procedimientofinito').
[3][3] De acuerdo a Rowe y Gray (véase la referencia más adelante), la mayoría de los problemas han sido resueltos. Algunos no fueron definidoscompletamente, pero se ha progresado lo suficiente en ellos como para considerarlos «resueltos»; Rowe y Gray listan el cuarto problema comodemasiado vago para decidir si se ha resuelto.
[4] El problema 8 contiene dos problemas famosos, ambos aún sin resolver. El primero de ellos, la hipótesis de Riemann es uno de los sieteproblemas premiados del milenio, que pretendían ser los "Problemas de Hilbert" del siglo XXI.
[5] El problema 9 ha sido resuelto en el caso abeliano, mediante el desarrollo de la teoría de cuerpos de clases; el caso no abeliano sigue sinresolver, si se interpreta eso como teoría de cuerpos de clases no abelianas.
[6] Rowe y Gray también listan el problema 18º como "abierto" en su libro de 2000, porque el problema de apilamiento compacto (tambiénconocido como conjetura de Kepler) estaba sin resolver, pero se ha propuesto una solución desde entonces (ver en referencias).
problema 2:Lo que sigue viene de Nagel y Newman, pp. 96 y 97: "Este impresionante resultado del análisis deGodel no debería malinterpretarse: no excluye una demostración metamatemática de la consistencia dela aritmética. Lo que excluye es una demostración de consistencia que se pueda reflejar en lasdeducciones formales de la aritmética- Nota al pie 29.[Esta nota da un ejemplo de la trisección de unángulo (es posible, pero no con regla y compás)]. De hecho, se han construido demostracionesmetamatemáticas de la consistencia de la aritmética, siendo notable la de 1936 de Gerhard Gentzen,miembro de la escuela de Hilbert, y por otros desde entonces Nota al pie 30" [Nota 30: Describe lademostración de Gentzen, que usa inducción transfinita; "30: la demostración de Gentzen depende de ladisposición de todas las demostraciones de la aritmética en orden lineal de acuerdo a su grado de'simplicidad'... pero el argumento de Gentzen no se puede mapear sobre el formalismo de la aritmética.Más aún, aunque la mayoría de los estudiosos no cuestionan la cogencia de la demostración, no esfinitista en el sentido de las estipulaciones originales de Hilbert de una demostración absoluta deconsistencia."[cursiva añadida]..."Pero estas demostraciones [metamatemáticas] no pueden representarsedentro del cálculo aritmético; y, dado que no son finitistas, no alcanzan los objetivos proclamados por elprograma original de Hilbert."
Goldstein da una definición de un "sistema formal finitista":"...sistemas formales finitistas... sistemas formales con un alfabeto finito o numerable (o contable) desímbolos, fbds [fórmulas bien definidas] de tamaño finito, y reglas de inferencia que sólo impliquen unnúmero finito de premisas. (Los lógicos también trabajan con sistemas formales de alfabetos nonumerables, con fbds de tamaño infinito, y con demostraciones de infinitas premisas."(p. 144, nota al pie7)
Problemas de Hilbert 153
Referencias• Gray, Jeremy J. (2000). El reto de Hilbert. Crítica. ISBN 84-8432-465-6• Yandell, Benjamin H. (2002). The Honors Class. Hilbert's Problems and Their Solvers. A K Peters. ISBN
1-56881-141-1• On Hilbert and his 24 Problems. En: Proceedings of the Joint Meeting of the CSHPM 13(2002)1-22 (26th
Meeting; ed. M. Kinyon)• Nagel, Ernest and Newman, James R., Godel's Proof, New York University Press, 1958. Una presentación
maravillosa (legible, extensiva) sobre la Demostración de Gödel, con comentarios.• John Dawson, Jr Logical Dilemmas, The Life and Work of Kurt Gödel, AK Peters, Wellesley, Mass., 1997. Gran
cantidad de información relevante al "programa" de Hilbert y al impacto de Gödel en la Segunda Pregunta, elimpacto del Intuicionismo de Arend Heyting y Brouwer en la filosofía de Hilbert. Dawson es Profesor deMatemáticas en la U. Penn State, catalogador de los artículos de Gödel para el Institute for Advanced Study dePrinceton, y co-editor de los Trabajos Reunidos de Gödel (Collected Works)
• Rebecca Goldstein, Incompleteness: The Proof and Paradox of Kurt Gödel, Atlas Books, W. W. Norton & Co.,New York, 2005. Formalismo y Hilbert: su definición de "demostración finitista" está en la nota 2 de su artículo.Los lectores deberían quedar avisados de que ella no es siempre correcta.
• Felix E. Browder (editor), Mathematical Developments Arising from Hilbert Problems, Proceedings of Symposiain Pure Mathematics XXVIII (1976), American Mathematical Society. Colección de ensayos de estudios deexpertos dedicados a cada uno de los 23 problemas dando énfasis a los desarrollos actuales.
• Yuri Matiyasévich, Hilbert's Tenth Problem, MIT Press, Cambridge, Massachusetts, 1993. Informe de niveluniversitario escrito por el matemático que completó la solución al problema.
• Torkel Franzén, Gödel's Theorem: An Incomplete Guide to Its Use and Abuse, AK Peters, Wellesley, Mass.,2005. Informe de un filósofo que ha dominado la matemática y es capaz de explicarlo de una manera clara y a unnivel básico. El autor trata con los diferentes puntos de vista sobre los teoremas de incompletitud.
Enlaces externos• Listado de los 23 problemas, con descripción de los que han sido resueltos (http:/ / www. mathacademy. com/ pr/
prime/ articles/ hilbert_prob/ index. asp?PRE=hilber& TAL=Y& TAN=Y& TBI=Y& TCA=Y& TCS=Y&TEC=Y& TFO=Y& TGE=Y& TNT=Y& TPH=Y& TST=Y& TTO=Y& TTR=Y& TAD=)
• Texto original de la charla de Hilbert, en alemán (http:/ / www. mathematik. uni-bielefeld. de/ ~kersten/ hilbert/rede. html)
• Traducción al inglés de la charla de Hilbert de 1900 (http:/ / aleph0. clarku. edu/ ~djoyce/ hilbert/ toc. html)• Detalles sobre la solución al problema 18 (http:/ / www. math88. pitt. edu/ articles/ hilbert. html)• The Mathematical Gazette, Marzo de 2000 (páginas 2-8) "100 Years On" (http:/ / www. mathsyear2000. org/
resources/ mathassoc/ Maths_Gazette. pdf)• "On Hilbert's 24th Problem: Report on a New Source and Some Remarks." (http:/ / www. ams. org/ amsmtgs/
2025_abstracts/ 962-01-285. pdf)• Los problemas de París (http:/ / www. math. umn. edu/ ~wittman/ problems2. html)• Página del décimo problema de Hilbert (http:/ / logic. pdmi. ras. ru/ Hilbert10)• (http:/ / www. sinewton. org/ numeros/ numeros/ 43-44/ Articulo03. pdf) Información sobre los 23 Problemas de
Hilbert.
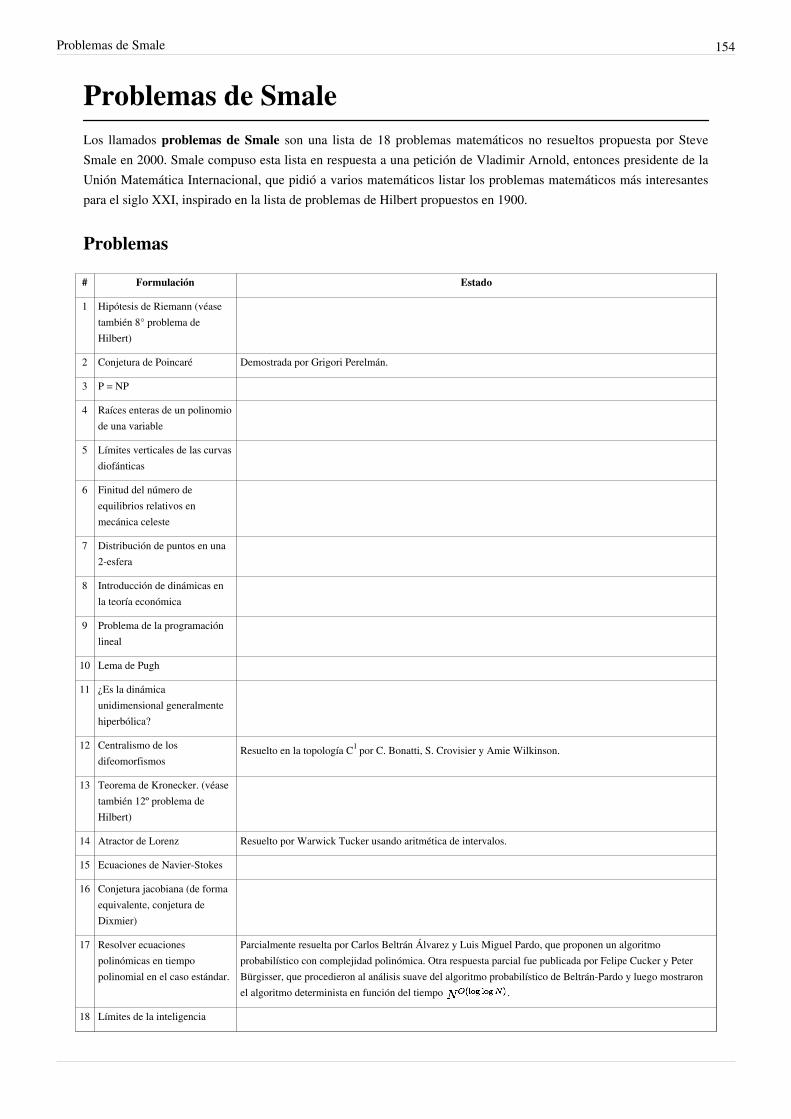
Problemas de Smale 154
Problemas de SmaleLos llamados problemas de Smale son una lista de 18 problemas matemáticos no resueltos propuesta por SteveSmale en 2000. Smale compuso esta lista en respuesta a una petición de Vladimir Arnold, entonces presidente de laUnión Matemática Internacional, que pidió a varios matemáticos listar los problemas matemáticos más interesantespara el siglo XXI, inspirado en la lista de problemas de Hilbert propuestos en 1900.
Problemas
# Formulación Estado
1 Hipótesis de Riemann (véasetambién 8° problema deHilbert)
2 Conjetura de Poincaré Demostrada por Grigori Perelmán.
3 P = NP
4 Raíces enteras de un polinomiode una variable
5 Límites verticales de las curvasdiofánticas
6 Finitud del número deequilibrios relativos enmecánica celeste
7 Distribución de puntos en una2-esfera
8 Introducción de dinámicas enla teoría económica
9 Problema de la programaciónlineal
10 Lema de Pugh
11 ¿Es la dinámicaunidimensional generalmentehiperbólica?
12 Centralismo de losdifeomorfismos
Resuelto en la topología C1 por C. Bonatti, S. Crovisier y Amie Wilkinson.
13 Teorema de Kronecker. (véasetambién 12º problema deHilbert)
14 Atractor de Lorenz Resuelto por Warwick Tucker usando aritmética de intervalos.
15 Ecuaciones de Navier-Stokes
16 Conjetura jacobiana (de formaequivalente, conjetura deDixmier)
17 Resolver ecuacionespolinómicas en tiempopolinomial en el caso estándar.
Parcialmente resuelta por Carlos Beltrán Álvarez y Luis Miguel Pardo, que proponen un algoritmoprobabilístico con complejidad polinómica. Otra respuesta parcial fue publicada por Felipe Cucker y PeterBürgisser, que procedieron al análisis suave del algoritmo probabilístico de Beltrán-Pardo y luego mostraronel algoritmo determinista en función del tiempo .
18 Límites de la inteligencia
Problemas de Smale 155
Referencias
Problemas del milenioLos problemas del milenio son siete problemas matemáticos cuya resolución sería premiada, según anunció el ClayMathematics Institute en el año 2000, con la suma de un millón de dólares cada uno. A fines de 2013, únicamenteuno de estos problemas ha sido resuelto, la hipótesis de Poincaré.
P versus NPConsiste en decidir si la inclusión entre las clases de complejidad P y NP es estricta.Las matemáticas actuales no poseen la suficiente capacidad para poder distinguir problemas de tipo P y NP, para loscuales es necesario desarrollar algoritmos bastante complejos. El problema en sí reside en que existen problemas queno pueden resolverse en tiempo polinomial en una máquina determinista, es decir, no son abarcables. La aritméticaactual tiene límites a la hora de realizar algunos cálculos que ni los ordenadores más potentes pueden realizar en untiempo "razonable", es decir, del orden de las ó operaciones. Sin embargo el carácter exponencial de algunosproblemas hace que actualmente su tratamiento sea inviable.Se piensa que estos problemas podrían estar relacionados con el teorema de incompletitud de Gödel. Según parece,ciertos enunciados matemáticos, entre los que se incluyen los que se refieren a cotas inferiores de tiempo de cifrado,no se pueden demostrar dentro del marco de la aritmética de Peano, que es la forma estándar de la aritmética.Un ejemplo sería: si queremos determinar todas las formas posibles de asignar 70 personas a 70 trabajos diferentesde forma que todas las personas tengan un trabajo y ninguna plaza quede vacante, no sería difícil (para quien poseauna mínima base matemática) establecer la solución: 70! (setenta factorial). Sin embargo, el cálculo de este númerosería equivalente a un número del orden de 10 elevado a la centésima potencia, lo que significa que ni en la edad deluniverso podría resolverse computacionalmente este problema.Hoy en día el estudio de este problema se plantea como la resolución o búsqueda de los límites en la computación.
La conjetura de HodgeLa conjetura de Hodge dice que para variedad algebraicas proyectivas, los ciclos de Hodge son una combinaciónlineal racional de ciclos algebraicos.
La conjetura de PoincaréEste es el único problema que ha sido resuelto. En topología, la esfera (o cascarón esférico) se caracteriza por ser laúnica superficie compacta simplemente conexa. La conjetura de Poincaré establece que esta afirmación es tambiénválida para esferas tridimensionales.En marzo de 2002, un matemático inglés, Martin Dunwoody, de la Universidad de Southampton, afirmaba haberresuelto este problema, pero luego se encontró un error.[1]
El problema había sido resuelto en los casos de n > 3 por algunos matemáticos, Michael Freedman, Steven Smale, E.C. Zeeman, se mantenía inaccesible, curiosamente, para n = 3.Finalmente, el matemático ruso Grigori Perelmán dio con la solución, anunciada en 2002 y dada a conocer en 2006.La resolución de la hipótesis de Poincaré hizo que a Grigori Perelmaán le fuera concedida en el XXV CongresoInternacional de Matemáticos la Medalla Fields, considerada el mayor honor al que puede aspirar un matemático,premio el cual rechazó debido a que no quería convertirse en una "mascota" para el mundo de las matemáticas.
Problemas del milenio 156
La hipótesis de RiemannLa hipótesis de Riemann dice que todos los ceros no triviales de la función zeta de Riemann tienen una parte real de1/2.
Existencia de Yang-Mills y del salto de masaEn Física, la teoría cuántica de Yang-Mills describe partículas con masa positiva que poseen ondas clásicas queviajan a la velocidad de la luz. Este es el salto de masa. El problema es establecer la existencia de la teoría deYang-Mills y un salto de masa.
Las ecuaciones de Navier-StokesLas ecuaciones de Navier-Stokes describen el movimiento de los líquidos y gases. Si bien éstas fueron formuladas enel siglo XIX, todavía no se conocen todas sus implicaciones, principalmente debido a la no linealidad de lasecuaciones y los múltiples términos acoplados. El problema consiste en progresar hacia una teoría matemática mejorsobre la dinámica de fluidos. El enunciado del problema es demostrar si a partir de unas condiciones iniciales defluido laminar la solución del flujo para todos los instantes de tiempo es también un flujo laminar.
La conjetura de Birch y Swinnerton-DyerLa conjetura de Birch y Swinnerton-Dyer trata sobre un cierto tipo de ecuación que define curvas elípticas sobre losracionales. La conjetura dice que existe una forma sencilla de saber si esas ecuaciones tienen un número finito oinfinito de soluciones racionales.
Referencias[1] George G. Szpiro, The secret life of numbers: 50 easy pieces on how mathematicians work and think. (http:/ / books. google. com/
books?id=qIXl0kEwrVMC& pg=PA51& lpg=PA51& dq="Martin+ Dunwoody"+ poincare& source=bl& ots=tz789PIvtU&sig=2j2cXbLF2Xg3bPl_09ReDYUg9SQ& hl=en& ei=U1xaS_3MM4G8NvPo-YYP& sa=X& oi=book_result& ct=result& resnum=7&ved=0CCEQ6AEwBjge#v=onepage& q=Dunwoody& f=false) National Academies Press, 2006. ISBN 0-309-09658-8; p. 19
Enlaces externos• Presentación formal de cada problema (http:/ / www. claymath. org/ library/ monographs/ MPP. pdf)• The Millennium Grand Challenge in Mathematics (http:/ / www. ams. org/ notices/ 200606/ fea-jaffe. pdf)• The Millennium Prize Problems (http:/ / www. claymath. org/ prizeproblems)
Test de primalidad 157
Test de primalidad
El 39º número primo de Mersenne era el mayorconocido hasta la fecha de creación de este
artículo.
La cuestión de la determinación de si un número n dado es primo esconocida como el problema de la primalidad. Un test de primalidad(o chequeo de primalidad) es un algoritmo que, dado un número deentrada n, no consigue verificar la hipótesis de un teorema cuyaconclusión es que n es compuesto.
Esto es, un test de primalidad sólo conjetura que “ante la falta decertificación sobre la hipótesis de que n es compuesto podemos tenercierta confianza en que se trata de un número primo”. Esta definiciónsupone un grado menor de confianza que lo que se denomina pruebade primalidad (o test verdadero de primalidad), que ofrece unaseguridad matemática al respecto.
Introducción
Los problemas que implican a las matemáticas discretas están entre los más difíciles de las matemáticas.Concretamente el de la factorización es un problema para el que todavía no se ha encontrado una solución que sepueda acotar en tiempo polinomial.[1]
Por otra parte, algunas aplicaciones de las matemáticas que utilizan el problema de la factorización precisan de unaserie de números primos muy grandes escogidos de forma aleatoria. El algoritmo para obtener un número primoaleatorio muy grande sería algo así:
Algoritmo Obtención de un número primo aleatorio
/*Basado en el postulado de Bertrand*/
Entrada: Un número natural n.
Salida : P (el número primo aleatorio buscado).
1. Función Genera_numero_aleatorio_en_intervalo 2. Mientras no sea un número primo haga lo siguiente:
1.2. Si entonces:
1.3. Retorne
El tiempo de finalización de este algoritmo no es determinado, pero existe una alta probabilidad de que finalice entiempo polinomial siempre y cuando haya suficientes números primos y estos estén distribuidos de forma más omenos uniforme. Afortunadamente para las aplicaciones que precisan números primos aleatorios, esto es así.Veamos por qué.Lo primero que podemos establecer es que el cardinal del conjunto de primos en el conjunto de los númerosnaturales es infinito (esto es, que hay infinitos números primos). El teorema de Dirichlet (1837) dice que simcd(a, n) = 1 entonces hay infinitos primos congruentes con a módulo n. En otras palabras (y utilizando un corolariode Dirichlet), los números primos están uniformemente distribuidos en las clases congruentes con la función φ deEuler en para cualquier valor de n.Claro que, si los números primos están uniformemente distribuidos, pero hay un número pequeño de ellos, la búsqueda podría ser imposible en la práctica. Para resolver este segundo problema podemos acudir al teorema de Hadamard (1896) que establece que la cardinalidad del conjunto de números primos en el intervalo [2..n] es asintótico a . Este número tiende a infinito muy suavemente, lo que implica que aún para valores grandes
Test de primalidad 158
de n existe una probabilidad suficientemente alta de dar con un número primo de forma aleatoria.De lo visto hasta aquí podemos concluir que el algoritmo anterior puede obtener una respuesta en tiempo polinomialsi existe un algoritmo polinomial para comprobar que un número n arbitrariamente grande es primo. Lo que nosdevuelve al problema de la primalidad.En cualquier caso una modificación muy frecuente para hacer el algoritmo determinista es partir de una semillaaleatoria y luego hacer una búsqueda secuencial de la cota inferior del conjunto de primos mayores que la semilla departida.
De Euclides a LucasAntes de entrar a tratar las técnicas modernas que se aplican al problema de la primalidad no está de más hacer unbreve repaso a la historia del problema y a las soluciones aportadas a lo largo de los siglos.Los problemas de la factorización de un número dado y la determinación de números primos son muy antiguos. Losregistros históricos sobre el estudio de números primos se remontan a Euclides (siglo III a. C.) aunque hayevidencias de que el conocimiento de la existencia de estos números tan particulares se podría remontar a Pitágoras(siglo VI a. C.).Sin embargo, el primer procedimiento matemático conocido concerniente estos números se remonta a Eratóstenes(siglo II a. C.) y es la conocida criba de Eratóstenes, que todavía se estudia en las escuelas de educación primaria. Elmétodo es sencillo: para obtener los números primos menores que un dado, primero colocamos los números de 1a en una lista y empezamos tachando todas las posiciones pares. Luego, sobre la lista que queda tachamos todoslos que son múltiplo de tres (el siguiente número de la lista después del 2). Luego sobre los que quedan todos los queson múltiplos de cinco (el siguiente número de la lista después del 3).Hoy día, este algoritmo tiene un valor más histórico que práctico. Funciona bien, pero es muy ineficiente.La mejora más obvia atañe a la forma en la que el algoritmo termina (curiosamente Eratóstenes no tuvo en cuentaeste hecho y fue el matemático árabe ibn al-Banna quien la propuso siglos después): es suficiente con iterar hasta losdivisores primos de menores que .Otro problema de la criba es que no responde al problema de la simple determinación de primalidad de un númerodado, sino que ofrece una lista (potencialmente infinita) de números primos.El problema, más concreto, de determinar si un número dado es primo puede derivarse del anterior, simplementese simula la criba para y se comprueba si permanece en ella. La cuestión es que el coste de seguir esteprocedimiento es muy grande.Como muchas otras aportaciones matemáticas, el problema de la primalidad llegó a la Europa moderna a través delos árabes, pero no fue hasta muchos siglos después que aparecieron los primeros registros escritos sobre laprimalidad y su solución. Estos corresponden al matemático italiano Leonardo de Pisa (Fibonacci) quien presentó unalgoritmo muy simple para determinar si un número n dado es primo consistente en comprobar que ningún otronúmero primo inferior a la divide a . Este algoritmo tiene la característica de ser determinista (siempreobtiene una solución) aunque tremendamente ineficiente. En realidad, Fibonacci es más conocido por la sucesión quelleva su nombre y que también tiene su papel en el problema que nos ocupa. Luego veremos algo más sobre lafamosa sucesión de Fibonacci.El primero en utilizar relaciones observadas entre los números para determinar la primalidad fue el boloñés PietroAntonio Cataldi con su trabajo sobre los números perfectos.Un número perfecto es aquel que es igual a la suma de sus divisores propios. Por ejemplo 6 es perfecto, ya que lasuma de sus divisores (1+2+3) es igual al mismo. Los siete primeros números perfectos son 6, 28, 496, 8128,33550336, 8589869056 y 137438691328.

Test de primalidad 159
Cataldi determinó que si es primo entonces ha de ser primo y ha de ser perfecto. Esteteorema nos introduce una familia de números especialmente importante para la historia de la primalidad: losllamados números de Mersenne en honor del filósofo Marin Mersenne (1588-1665), que son números de la forma
donde p es un número primo. Mersenne comprobó que de los 257 primeros números de la familiaque lleva su nombre, sólo 11 son primos (son los para p = 2, 3, 5, 7, 13, 17, 19, 31, 67, 127 y 257).En realidad Mersenne cometió algunos errores ya que no es primo para p = 67 ni 257 y sí lo es para p = 61, 89y 107; no obstante su trabajo sobre estos números ha quedado reflejado en el hecho de que llevan su nombre.Contemporáneo de Mersenne y mucho más importante para la historia y el estado del arte actual del problema queestamos tratando fue el importante matemático Pierre de Fermat (1607-1665). Fermat es posiblemente el teóriconumérico más renombrado de la historia y es muy conocido por un teorema que esencialmente estuvo sindemostración durante más de trescientos años. Con referencia a la primalidad, Fermat tuvo correspondencia conMersenne y, de hecho, estableció un resultado sobre los números primos que es esencial para las técnicas modernasde determinación de la primalidad. El teorema en cuestión (conocido como Pequeño teorema de Fermat o PTF)establece lo siguiente:
Teorema: Sea , entonces...
.Como corolario a este importante teorema se establece que si es primo, entonces cualquier número primo que divida a tiene que ser de la forma para algún . También se puede demostrarque si es el menor número tal que , entonces siempre que .Fermat buscaba números que le ayudaran a comprobar la primalidad de los números de Mersenne. En subúsqueda vio que el teorema antes expuesto era útil para detectar posibles primos tales que . Fermattambién sugirió que los números de la forma (denominados números de Fermat y representados por )debían ser primos y lo comprobó para todos los n menores que 4. No pudo demostrarlo para y hoy se sabe que
es compuesto, como lo son todos los restantes hasta (y posiblemente todos los demás, aunque esteúltimo extremo es aún una conjetura).Otro eminente matemático que estuvo interesado en el problema de la primalidad fue el suizo Leonhard Euler. Eulerse sintió atraído por los resultados de Fermat y encontró un divisor de (contradiciendo pues la conjetura deFermat sobre la primalidad de ). Sin embargo, su aportación más importante al problema fue el enunciado de unteorema relacionado que establece que todo divisor primo de debe ser de la forma para algún
.Hubo otros matemáticos también muy eminentes que trabajaron en el campo de la factorización de números, porejemplo Legendre y Gauss, y que también hicieron algunas contribuciones al problema de la primalidad; pero elúltimo de los matemáticos clásicos del que hablaremos que obtuvo notables resultados sobre la cuestión fue elfrancés François Éduard Anatole Lucas. Lucas trabajó sobre los números de Fibonacci y de Mersenne, obtuvoresultados sobre la divisibilidad de los primeros y determinó una prueba de primalidad para los números deMersenne (que aplicó a la comprobación de primalidad de ) que veremos a continuación.
Tests verdaderos de primalidadEn los apartados anteriores se ha hablado de dos problemas relacionados (factorización y primalidad) que de alguna manera son complementarios. Sin embargo, las dos cuestiones son de naturaleza muy distinta. Para convencer a alguien de que un número ha sido factorizado es suficiente con mostrar los factores y el resultado queda claro. Sin embargo convencer a esa misma persona de que un número dado es primo puede ser mucho más difícil. Como el matemático parisino del siglo XIX Fortuné Landry señaló, a menos que la otra parte conozca los métodos de comprobación de la primalidad y realice por sí misma los cálculos, la sencilla respuesta “es primo” es sólo cuestión de fe. Un test (o chequeo) de primalidad es un algoritmo que, dado un número de entrada n, no consigue verificar la

Test de primalidad 160
hipótesis de un teorema cuya conclusión es que n es compuesto.Ésta es la visión del matemático; desde el punto de vista del ingeniero las cosas no son blancas o negras. Por ello,convenimos en diferenciar los tests (o chequeos) de las pruebas. Antes de proseguir, ha llegado el momento dedefinir formalmente ambos conceptos.
Definición: Un test (o chequeo) de primalidad es un algoritmo que, dado un número de entrada n, noconsigue verificar la hipótesis de un teorema cuya conclusión es que n es compuesto.
Esto es, un test de primalidad sólo conjetura que “ante la falta de certificación sobre la hipótesis de que n escompuesto podemos tener cierta confianza en que se trata de un número primo”. Esta definición supone un gradomenor de confianza que lo que se denomina prueba de primalidad (o test verdadero de primalidad) que ofrece unaseguridad matemática al respecto.
Definición: Un algoritmo de prueba de primalidad (o test verdadero de primalidad) es un algoritmodeterminísta que, dado un número de entrada n, verifica la hipótesis de un teorema cuya conclusión esque n es primo. Una prueba de primalidad es la verificación computacional de dicho teorema.
Así pues se puede hablar de dos grados de certidumbre: las pruebas de primalidad (existe certidumbre matemática) ylos tests de primalidad (existe certidumbre práctica).El interés, fundamentalmente, es la aplicación práctica de las técnicas. Sin embargo, es interesante ver algo sobre laspruebas. En esta primera sección se ocupa de éstas y de algunos de los test clásicos de primalidad, dejando para unapartado posterior una discusión sobre el grupo de algoritmos complementario que, aunque no prueban la primalidadcon certidumbre matemática resultan mucho más interesantes al ser computablemente más estables y predecibles.Para empezar, el ejemplo clásico de test verdadero de primalidad: el Test de Lucas-Lehmer. La prueba LL se aplica alos números de Mersenne (la entrada es el índice p del número de Mersenne del que se quiere comprobar laprimalidad). La definición del algoritmo es la siguiente:
Algoritmo Test de Lucas-Lehmer para números de Mersenne. (Orden de complejidad )
Entrada: Un número primo p.
Salida: COMPUESTO si Mp es compuesto y PRIMO si Mp es un primo.
1. Defínase 2. Defínase 3. Para desde hasta haga lo siguiente:
1.4. Si entonces:
1. Retorne PRIMO5.5. Si no, entonces
1. Retorne COMPUESTO
Este resultado es importante, ya que presenta la prueba como una secuencia sencilla de pasos lineal en n donde todaslas operaciones básicas (productos, restas, módulos, comparaciones) son computables en tiempo polinómico.El problema obvio que tiene esta prueba es la generalidad, ya que sólo se puede aplicar a los números de Mersenne.El segundo algoritmo de prueba de primalidad se aplica a números n genéricos y supone que se conoce unafactorización parcial de n – 1. Se basa en el teorema de Pocklington.[2] Dicho teorema establece lo siguiente:
Teorema: tal que y , donde tiene una factorización en númerosprimos conocida.
Si para cada factor primo de tal que:
(i)
(ii) .
Test de primalidad 161
Entonces , primo divisor de n, ; de lo que se deduce que sientonces n es primo.
Así, si se conoce la factorización de un divisor de F se pueden concluir por el contraste con las condiciones (i) y (ii)que un número dado es primo.Un ejemplo de prueba por Pocklington para el número n=57283. Se supone conocida la factorización parcialn–1=6∙9547 y también conocido el hecho de que F=9547 es un número primo, por tanto q es único e igual a F.Puesto que , y , podemos concluir que n es primo.
El algoritmo es sencillo. Se limita a realizar una serie de cálculos con aritmética modular y comprobar el resultado.La contrapartida es que se necesita una factorización parcial de n.Existe un resultado menos general que el de Pocklington que es debido a otro matemático del siglo XIX (el teoremade Proth). Pero como se ha dicho es menos general y tiene la misma aplicación, por lo que no entraremos en detalles.La última prueba en este apartado se debe a Pepin (1877). El teorema de Pepin se enuncia como sigue:
Teorema: , el número de Fermat enésimo, definido por es primo si y sólo si.
La constante 3 en realidad se puede sustituir por cualquier entero positivo para el que un operador llamado símbolode Jacobi sea igual a –1. Esto incluye a los valores 3, 5 y 10.Así como la prueba LKL sólo se puede aplicar a los números de Mersenne, la prueba de Pepin sólo se puede aplicara los números de Fermat, por lo que su uso (como en el caso de LKL) queda bastante restringido.Lo que subyace a estas pruebas es esencialmente el resultado que se desprende del PTF. Si el teorema inverso fuesecierto (esto es, si la comprobación de la condición an-1≡1 (mod n), para cualquier a primo relativo de n implicase laprimalidad de n) la prueba de primalidad sería un asunto muy sencillo. Sin embargo, existe una familia de númeroscompuestos que cumplen la condición y que, por tanto, invalidan la posibilidad de realizar una prueba por el inversodel PTF; estos números se denominan Números de Carmichael por el matemático que los descubrió. Un ejemplo denúmero de Carmichael es n=561. Hablaremos de ellos en la próxima sección.
Tests probabilísticosLos tests probabilísticos están basados en la idea de relajar la corrección de la prueba para conseguir uncomportamiento de respuesta polinomial o subpolinomial. Se basan bien en el uso PTF (que acabamos de comentar),bien en el uso de lo que se conocen como verificadores y falsadores de Euler.El primer ejemplo de test probabilístico que veremos es el test de Fermat. Dicho test está basado en el PTF. Elalgoritmo basado en este test se aplica eligiendo varios enteros aleatorios entre 2 y n-2 y calculando
. Si algún valor de es distinto de 1 el algoritmo devuelve compuesto, en otro casodevuelve primo. La fortaleza de este test radica en que tras un número normalmente pequeño de repeticiones laprobabilidad de que un número compuesto pase como primo es muy pequeña.Como vimos en la sección anterior, el test de Fermat adolece de un conocido problema: los números de Carmichael.Los números de Carmichael pasan la condición de Fermat para todos los posibles valores de ; esto implica que sinuestro candidato a número primo fuese un número de Carmichael, no importa cuántas veces pasemos el test deFermat, el resultado siempre sería negativo y en consecuencia el resultado del test sería un falso primo positivo. Sinembargo, los números de Carmichael son relativamente escasos (hay 105.212 de ellos menores de ) por lo quela probabilidad de elegir alguno de ellos es realmente baja. El test de Fermat es de amplio uso en el campo de lacriptografía.Otro test muy conocido y utilizado en criptografía es el test de Solovay-Strassen (SS). Este test está basado en el criterio de Euler, que establece que, si n es un número primo impar, entonces para

Test de primalidad 162
todos los enteros que satisfacen que el mcd(a, n)=1, donde representa el símbolo de Jacobi definido por
donde cada es un primo distinto, y es el símbolo de Legendre definido por
Los valores de que cumplen el criterio de Euler se denominan verificadores de Euler para la primalidad de n y losque no lo cumplen se denominan falsadores de Euler para la primalidad de n.El test SS se podría codificar de la siguiente manera:
Algoritmo Test de Solovay-Strassen. (Orden de complejidad )
Entrada: Un número natural n>1, el número k de veces que se ejecuta el test y nos determina la fiabilidad del test.
Salida: COMPUESTO si n es compuesto y POSIBLE PRIMO si n es un posible primo.
1. Para desde hasta haga lo siguiente:
1. Función Genera_numero_aleatorio_en_intervalo 2.3. Si entonces:
1. retorne COMPUESTO
4. /*Símbolo de Jacobi*/
5. Si entonces:
1. Retorne COMPUESTO2. Retorne POSIBLE PRIMO
El test SS tiene una probabilidad de acierto de ½ por cada paso de j. Esto implica que la probabilidad de que laentrada sea un número compuesto habiendo sido declarado como primo es menor que ½t. Este test fue descubierto en1978 y fue modificado en 1982 por Atkin y Larson, pero hoy por hoy está en desuso. El motivo es que el test quevamos a estudiar a continuación es más eficiente que el test SS y, al menos, tiene el mismo nivel de corrección.El test más implantado en la actualidad es el Miller-Rabin (también conocido como test fuerte del pseudoprimo). Eltest de Miller-Rabin (MR) está basado en el siguiente hecho: Si tenemos un número primo n y donder es impar, se cumple que , entonces o bien o bien
.El test MR se podría codificar de la siguiente manera:
Algoritmo Test de Miller-Rabin. (Orden de complejidad )

Test de primalidad 163
Entrada: Un número natural n>1, el número k de veces que se ejecuta el test y nos determina la fiabilidad del test.
Salida: COMPUESTO si n es compuesto y POSIBLE PRIMO si n es un posible primo.
1. Definase y tal que es impar y 2. Para desde hasta haga lo siguiente:
1. Función Genera_numero_aleatorio_en_intervalo 2.3. Si entonces:
1.2. Mientras haga lo siguiente:
1.2. Si entonces:
1. Retorne COMPUESTO3.
3. Si entonces:
1. Retorne COMPUESTO3. Retorne POSIBLE PRIMO
El error cometido en cada paso de iteración es de ¼, (el diseño hace que existan más falsadores de Euler que en SS)por lo que la probabilidad de que la entrada sea un número compuesto habiendo sido declarado como primo esmenor que ¼t. Por otra parte, al utilizar exponenciación binaria las operaciones necesarias se realizan rápidamente.De los tres tests probabilísticos aquí presentados, el mejor desde el punto de vista técnico y práctico es el deMiller-Rabin. El test SS es computacionalmente peor y más difícil de implementar ya que hay que calcular elsímbolo de Jacobi. Por otra parte ambos tienen la ventaja frente al de Fermat de que podemos aumentar la confianzade la primalidad con un valor de t arbitrariamente alto (Fermat tiene el límite definido por los números deCarmichael).
Avances recientesDesde los años 70 se ha estado trabajando en la mejora de los algoritmos clásicos para obtener mejores pruebas deprimalidad.[3] Para ello se ha trabajado con la factorización de formas polinómicas de n. Entre estos algoritmosdestacan el debido a Adleman, Pomerance y Rumely (APR) y la mejora que sobre éste hicieron Cohen y Lenstra(APR-CL) que obtienen complejidades casi polinomiales.También se está avanzando en este campo utilizando otras formas más sencillas de trabajo con grupos matemáticosen lugar de la aritmética modular de los grupos de Galois.En este sentido se están haciendo avances en el trabajo con curvas elípticas módulo n. Una curva elíptica es unafunción que se define de la siguiente forma:
En curvas de este tipo han estado trabajando desde 1986 Goldwasser, Kilian y Atkin. Este último definió el métodoECPP o prueba de primalidad por curva elíptica (Elliptic Curve Primality Proving), que tiene diversasimplementaciones y se ha probado que es de orden polinomial para casi todas las entradas.Muchas de las pruebas y tests de primalidad que hemos visto hasta ahora se resuelven en tiempo polinomial.Durante años los sistemas criptográficos han estado utilizándolos para la generación de claves seguras. Sin embargotienen limitaciones. Algunos no son pruebas de primalidad y en consecuencia no devuelven un certificado deprimalidad: existe una probabilidad (aunque pequeña) de que un número sea considerado primo cuando en realidades compuesto; son los que se conocen como algoritmos probabilísticos de orden P (RP). Otros sí que certifican laprimalidad, pero no se garantiza que el test termine en tiempo polinomial; son los que se conocen como algoritmosdeterministas de tiempo polinomial probabilístico (ZPP). Algunos necesitan factorizaciones parciales o totales den+1 y, como ya se ha visto, la factorización es un problema que no se puede resolver en tiempo polinómico en el

Test de primalidad 164
caso general. Para otros la terminación en tiempo polinomial se basa en ciertas conjeturas no probadas.Por ejemplo, el test de Miller es polinomial si la hipótesis extendida de Riemann (o conjetura ERH) es cierta. Existeuna creencia generalizada en la conjetura ERH, pero al faltar una demostración matemática no se puede concluir suterminación polinomial.
Test de primalidad AKSEl reciente descubrimiento de un algoritmo determinista de tiempo polinomial que no se basa en ninguna conjeturano probada debe ser considerado un hito importante. Concretamente en agosto del año 2002 tres académicos de laUniversidad de Kanpur (Agrawal, Kayal y Saxena) presentaron[4] un algoritmo determinista de clase P para ladeterminación de la primalidad de un número. La clave del algoritmo es una versión simplificada del PTF, esto es lacondición:
Los autores se las arreglaron para formular el siguiente algoritmo, que se ha probado puede ejecutarse en un tiempode complejidad máxima de .
Algoritmo Test de primalidad AKS. ( Orden de complejidad )
Entrada: Un número natural n > 1.
Salida: COMPUESTO si n es compuesto y PRIMO si n es primo.
1. Si existen tal que entonces:
1. Retorne COMPUESTO2.3. Mientras haga lo siguiente:
1. Si entonces:1. Retorne COMPUESTO.
2. Si es primo > 2 entonces:
1. Mayor factor de
2. Si entonces:
1.1. Salga de este ciclo3.
4. Para hasta haga lo siguiente:
1. Si entonces:
1. Retorne COMPUESTO5. Retorne PRIMO
Los autores demostraron además que, si determinados números primos (llamados números primos de SophieGermain) tienen la distribución conjeturada por el matemático austriaco Emil Artin, el exponente 21/2 que apareceen la expresión de complejidad puede reducirse a 15/2. Lo que implica que el tiempo estimado de ejecución seríaequivalente al de alguna prueba de primalidad de las vistas anteriormente (concretamente la prueba ECPP). Y en elartículo publicado por los mismos, también mencionaban una versión del algoritmo AKS presentada por H.W.Lenstra y C. Pomerance[5] que se ejecuta en tiempo de forma incondicional.En realidad este descubrimiento no tiene implicaciones prácticas en la computación moderna. Lo cierto es que laspartes constantes de la complejidad del algoritmo son mucho más costosas que en los actuales algoritmosprobabilísticos. Es de esperar que en el futuro cercano se obtengan mejoras en esas constantes, pero lo cierto es quelos algoritmos actuales de generación de números primos cubren bastante bien las necesidades actuales y,posiblemente, las futuras (y es poco probable que la línea propuesta mejore en tiempo de ejecución a los algoritmosprobabilísticos existentes). Sin embargo sí que tiene una importancia fundamental desde el punto de vista teórico, yaque supone la primera prueba de primalidad de estas características que ha sido matemáticamente demostrada.
Test de primalidad 165
Referencias• Cormen, Thomas H.; Leiserson, Charles E.; Rivest, Ronald L.; Stein, Clifford: Introduction to Algorithms.
Sección 31.8: "Primality testing", pp.887–896. MIT Press & McGraw-Hill, 2a edición, 2001. (ISBN0-262-03293-7.)
• Crandall, Richard & Pomerance, Carl: Prime Numbers: A Computational Perspective Capítulo 3: "RecognizingPrimes and Composites", pp.109–158. Capítulo 4: "Primality Proving", pp.159–190. Sección 7.6: "Elliptic curveprimality proving (ECPP)", pp.334–340. Springer, 1a edición, 2001. (ISBN 0-387-94777-9.)
• Knuth, Donald. The Art of Computer Programming, Volumen 2: Seminumerical Algorithms. Páginas 391–396 desección 4.5.4. Addison-Wesley, 3a edición, 1997. (ISBN 0-201-89684-2.)
• Williams, H.C.: Édouard Lucas and Primality Testing. John Wiley & Sons, 1998. (ISBN 0-471-14852-0.)
Notas[1] Papadimitriou, Christos H.: Computational Complexity. Sección 10.2: "Primality", pp.222–227. Addison-Wesley, 1era edición, 1993. (ISBN
0-201-53082-1.)[2] Caldwell, Chris,Finding primes & proving primality (http:/ / primes. utm. edu/ prove/ prove3_1. html)[3] Caldwell, Chris: The Prime Pages. Universidad de Tennessee. (Ver enlaces externos.)[4] Agrawal, Manindra; Kayal, Neeraj; Saxena, Nitin: "PRIMES is in P". Annals of Mathematics 160 (2004), no. 2, pp. 781–793.
Accesible en formato PDF desde la web www.math.princeton.edu (http:/ / www. math. princeton. edu/ ~annals/ issues/ 2004/ Sept2004/Agrawal. pdf)
[5] H. W. Lenstra jr. and Carl Pomerance: "Primality testing with Gaussian periods".Accesible en formato PDF desde la web citeseerx (http:/ / citeseerx. ist. psu. edu/ viewdoc/ download?doi=10. 1. 1. 94. 1384& rep=rep1&type=pdf)
Enlaces externosPrograma• Solovay-Strassen (http:/ / computacion. cs. cinvestav. mx/ ~mruiz/ cursos/ maestria/ csac. html) Prueba de
primalidad por Solovay-Strassen en MapleEn inglés• Agrawal, Kayal & Saxena: Primes is in P (http:/ / www. cse. iitk. ac. in/ users/ manindra/ algebra/ primality_v6.
pdf) Instituto de Tecnología Kanpur, India.• Bernstein, D.J.: Distinguishing prime numbers from composite numbers (http:/ / cr. yp. to/ primetests. html)• Caldwell, Chris (en inglés). [[The Prime Pages (http:/ / primes. utm. edu)]]. Universidad de Tennessee.
Conjetura 166
ConjeturaPor conjetura se entiende el juicio que se forma (moral, ético o matemático) de las cosas o sucesos por indicios yobservaciones. En matemáticas, el concepto de conjetura se refiere a una afirmación que se supone cierta, pero queno ha sido probada ni refutada hasta la fecha. Una vez se demuestra la veracidad de una conjetura, esta pasa a serconsiderada un teorema de pleno derecho y puede utilizarse como tal para construir otras demostraciones formales.
Conjeturas en la matemáticaHasta hace poco, la conjetura más conocida era el mal llamado último teorema de Fermat, mal llamado porqueaunque Pierre de Fermat afirmó haber encontrado una demostración, no se ha podido encontrar ninguna entre susescritos tras su muerte. Esta conjetura burló a la comunidad matemática durante más de tres siglos, hasta queAndrew Wiles la demostró al fin en 1993 y la elevó al rango de teorema.Estas son algunas de las conjeturas más famosas:• No hay números perfectos impares.•• Conjetura de Goldbach•• Conjetura de los números primos gemelos•• Conjetura de Collatz•• Hipótesis de Riemann• P ≠ NP• Conjetura de Poincaré (demostrada por Grigori Perelmán)•• Conjetura abc
Conjetura abcEn teoría de números, la conjetura abc fue formulada por primera vez por Joseph Oesterlé y David Masser en el año1985.Expone que, para cualquier existe una constante , tal que para cada tripleta de números coprimospositivos a, b y c que satisfagan , tenemos que:
donde rad(n) (el radical de n) es el producto de los distintos números primos divisores de n.En 2012 Shinichi Mochizuki propuso una demostración de más de 500 páginas que está pendiente de verificaciónpor otros matemáticos[1].Una más precisa formulación propuesta en 1996 por Alan Baker afirma que en la desigualdad, se puede reemplazarrad(abc) por ε−ωrad(abc), donde ω es el número total de primos distintos que dividen a a, b o c. Una conjeturarelacionada, formulada por Andrew Granville, afirma que en el lado derecho de la inecuación podríamos escribirO(rad(abc) Θ(rad(abc)) donde Θ(n) es el número de enteros hasta n divisibles sólo por primos que dividen a n.

Conjetura abc 167
Resultados parciales1986, C.L. Stewart y R. Tijdeman:
1991, C.L. Stewart y Kunrui Yu:
1996, C.L. Stewart y Kunrui Yu:
Donde es una constante absoluta, y son constantes positivas computables en función de .
Referencias[1] http:/ / www. lahojadearena. com/ revista/ 2013/ 06/ la-paradoja-de-la-prueba/
• http:/ / www. math. unicaen. fr/ ~nitaj/ abc. html• http:/ / www. math. columbia. edu/ ~goldfeld/ ABC-Conjecture. pdf
Conjetura de BealLa conjetura de Beal es una conjetura en teoría de números propuesta por Andrew Beal alrededor de 1993; unaconjetura similar fue sugerida independientemente en esas fechas por Andrew Granville.Mientras investigaba generalizaciones del último teorema de Fermat, Beal formuló la siguiente conjetura:Si
donde A, B, C, x, y, z son enteros positivos con x, y, z > 2 entonces A, B, y C deben tener un factor común primo.Beal ofreció un premio de un millón de dólares por una demostración de esta conjetura o por un contraejemplo.[1]
La Conjetura de Beal afirma que si , siendo x, y y z números enteros positivos mayores que 2,entonces A, B y C deben tener un factor primo común.
EjemplosPara ilustrar la solución, 33 + 63 = 35 tiene sus bases con un factor común 3, y la solución 76 + 77 = 983 tiene lasbases con un factor común 7. De hecho, la ecuación tiene infinitas soluciones, incluyendo, por ejemplo
para cualquier , , . Pero tal solución de la ecuación no es un contraejemplo de la conjetura, puesto quetodas las bases tienen el factor en común.El ejemplo 73 + 132 = 29 muestra que la conjetura es falsa si uno de los exponentes es igual a 2.

Conjetura de Beal 168
Verificación numéricaMediante búsqueda por ordenador, muy acelerada, mediante la ayuda de aritmética modular, esta conjetura ha sidoverificada para todo valor de las seis variables hasta 1000.[2] Así, en un contraejemplo, al menos una de las variablesdebe de ser mayor que 1000.La conjetura de Beal es una generalización del último teorema de Fermat, que corresponde al caso . Si
con ; entonces, o las bases son coprimas o comparten un factor común. Si estas compartenun factor común, se puede sacar de cada una de ellas para obtener una ecuación más pequeña, con bases coprimas.Dado que el último teorema de Fermat afirma que no existen soluciones enteras no nulas para
donde x>2,entonces tampoco existirán soluciones en los enteros positivos, pudiendo afirmar que laconjetura de Beal es cierta en este caso particular.La conjetura no es válida sobre un dominio más grande de enteros gaussianos. Después de que se ofreciera un preciode 50$ por un contraejemplo, Fred W. Helenius proporcionó el siguiente: (−2 + i)3 + (−2 − i)3 = (1 + i)4.[3]
Referencias[1] The Beal Conjecture (http:/ / www. math. unt. edu/ ~mauldin/ beal. html)[2] Beal's Conjecture: A Search for Counterexamples (http:/ / www. norvig. com/ beal. html)[3] Neglected Gaussians (http:/ / www. mathpuzzle. com/ Gaussians. html)
Enlaces externos• http:/ / www. bealconjecture. com/• http:/ / www. math. unt. edu/ ~mauldin/ beal. html• R. Daniel Mauldin (1997). « A Generalization of Fermat’s Last Theorem: The Beal Conjecture and Prize Problem
(http:/ / www. ams. org/ notices/ 199711/ beal. pdf)». Notices of the AMS 44 (11): pp. 1436–1439.• Beal's Conjecture (http:/ / planetmath. org/ ?op=getobj& amp;from=objects& amp;id=) en PlanetMath• http:/ / mathoverflow. net/ questions/ 28764/ status-of-beal-tijdeman-zagier-conjecture

Conjetura de Artin sobre raíces primitivas 169
Conjetura de Artin sobre raíces primitivasEn teoría de números, la conjetura de Artin sobre raíces primitivas expresa que dado un número entero a que noes un cuadrado perfecto y tampoco −1 es una raíz primitiva módulo de infinitos primos p. La conjetura tambiéndescribe una densidad asintótica de esos primos. Esta densidad conjetural es igual a la constante de Artin o a unmúltiplo racional de la misma.La conjetura fue formulada por Emil Artin a Helmut Hasse el 27 de septiembre de 1927, según el diario de esteúltimo. A pesar de los importantes progresos realizados, la conjetura sigue sin estar resuelta. De hecho, no existe unvalor único de a para el cual la conjetura de Artin sea demostrada.
FormulaciónSea a un entero que no es un cuadrado perfecto y tampoco −1. Escríbase a = a0b2 con a0 libre de cuadrados. Denotepor S(a) el conjunto de números primos p tales que a sea una raíz primitiva módulo p. Entonces1. S(a) tiene una densidad asintótica positiva dentro del conjunto de primos. En particular, S(a) es infinita.2. Bajo las condiciones de que a no sea una potencia perfecta y de que a0 no sea congruente con 1 módulo 4, esta
densidad es independiente de a y es igual a la constante de Artin que puede ser expresada como un productoinfinito
(sucesión A005596 [1] en OEIS).
Fórmulas de productos similares conjeturadas existen para la densidad cuando a no satisface las condicionesanteriores. En esos casos, la densidad conjeturada es siempre un múltiplo racional de CArtin.
EjemploPor ejemplo, tómese a = 2. La conjetura afirma que el conjunto de los números primos p para los cuales 2 es una raízprimitiva tiene la densidad anteriormente citada CArtin. El conjunto de tales primos es (sucesión A001122 [2] enOEIS)
S(2) = 3, 5, 11, 13, 19, 29, 37, 53, 59, 61, 67, 83, 101, 107, 131, 139, 149, 163, 173, 179, 181, 197, 211, 227,269, 293, 317, 347, 349, 373, 379, 389, 419, 421, 443, 461, 467, 491,....
Este tiene 38 elementos más pequeños que 500 y hay 95 primos menores que 500. El radio (que tiendeconjeturizadamente a CArtin) es 38/95 = 2/5 = 0.4.
Intentos de demostraciónEn 1967, Hooley publicó una demostración condicional para la conjetura, asumiendo ciertos casos de la hipótesisgeneralizada de Riemann. En 1984, R. Gupta y M. Ram Murty mostraron incondicionalmente que la conjetura deArtin es cierta para infinitos a usando métodos de cribado. Roger Heath-Brown mejoró sus resultados y mostróincondicionalmente que hay, como mucho, dos números primos excepcionales a para los cuales la conjetura de Artinfalla. Este resultado no es constructivo, en lo que se refiere a las excepciones. Por ejemplo, se sigue del teorema deHeath-Brown que uno de los primos 3, 5 ó 7 es una raíz primitiva módulo p para infinitos p. Pero la demostración noproporciona una forma de calcular cual de ellos es.

Conjetura de Artin sobre raíces primitivas 170
Referencias[1] http:/ / oeis. org/ A005596[2] http:/ / oeis. org/ A001122
• M. Ram Murty (1988). « Artin's conjecture for primitive roots (http:/ / www. mast. queensu. ca/ ~murty/ mi. dvi)»(DVI). Mathematical Intelligencer 10 (4): pp. 59–67. doi: 10.1007/BF03023749 (http:/ / dx. doi. org/ 10. 1007/BF03023749).
Conjetura de Fermat–CatalanEn teoría de números, la conjetura de Fermat–Catalan combina ideas del último teorema de Fermat y de laconjetura de Catalan, de ahí el nombre. La conjetura postula que la ecuación
(1) tiene un número finito de soluciones (a,b,c,m,n,k); aquí a, b, c son números enteros positivos coprimos y m, n, k sonenteros positivos que satisfacen
(2)
A fecha de 2008, se conocen las siguientes soluciones de (1):
La primera de ellas (1m+23=32) es la única solución donde una de las variables a, b o c es 1; esta es la conjetura deCatalan, demostrada en 2002 por Preda Mihăilescu. Técnicamente, este caso produce un número infinito desoluciones de (1) (puesto que se puede escoger cualquier m para m>6), pero a los efectos de enunciado de laconjetura de Fermat-Catalan se contabilizarán todas esas soluciones como una sola.Se conoce, mediante el teorema de Faltings, que para cualquier elección fijada de enteros positivos m, n y k quesatisfacen (2), existe únicamente un número finito de tuplas de números enteros coprimos (a, b, c) que resuelven (1),pero claro, la conjetura de Fermat–Catalan completa es una afirmación mucho más fuerte.La conjetura abc implica la conjetura de Fermat–Catalan.
Referencias

Conjetura de Hirsch 171
Conjetura de HirschEn optimización y en combinatoria poliédrica, la conjetura de Hirsch afirma que "si un poliedro está definido por ndesigualdades lineales en d variables siempre ha de ser posible viajar de cualquier vértice a cualquier otro vérticerecorriendo como mucho n-d aristas".[1] En términos un poco más técnicos, afirma que el grafo arista-vértice de unpolitopo de n-caras en un espacio euclidiano d-dimensional tiene un diámetro no mayor que n − d. Es decir, quecualquiera de dos vértices del politopo deben estar conectados el uno con el otro por una trayectoria de longitudn − d como máximo. La conjetura fue presentada primero en 1957 en una carta de Warren M. Hirsch a George B.Dantzig[2] y es motivada por el análisis del método simplex en programación lineal, a medida que el diámetro de unpolitopo proporciona un límite más bajo en el número de pasos necesarios por el método simplex.La conjetura de Hirsch fue probada para d < 4 y para varios casos especiales,[3] los límites superiores más conocidosmostraron solamente que los politopos tienen un diámetro sub-exponencial en función de n y d. sin embargo,después de más de cincuenta años, un contraejemplo fue anunciado en mayo de 2010 por Francisco Santos Leal, dela Universidad de Cantabria.[4] el resultado debe ser presentado en la conferencia 100 Years in Seattle: TheMathematics of Klee and Grünbaum. Varias formulaciones equivalentes del problema habían sido dadas, porejemplo la conjetura d-paso, que indica que el diámetro de cualquier politopo de 2d-caras en un espacio euclidianod-dimensional no es mayor que d.[] La conjetura de d-paso era conocida como verdadera para d < 6, pero cuando fueencontrado un contraejemplo el caso general también fue refutado, usando un politopo 43-dimensional de 86 carascon un diámetro de más de 43. El contraejemplo anunciado no tendría ninguna consecuencia directa para el análisisdel método simplex, pues no eliminaría la posibilidad de un más grande pero todavía lineal o un número polinómicode pasos.
Notas[1] Francisco Santos Leal en De Verdad, año XXX, número 28, julio de 2010, pág. 7.[2][2] , pp. 160 and 168.[3][3] E.g. see for 0-1 polytopes.[4] http:/ / gaussianos. com/ francisco-santos-encuentra-un-contraejemplo-que-refuta-la-conjetura-de-hirsch/
Referencias• Dantzig, George B. (1963), Linear Programming and Extensions, Princeton Univ. Press.• Kalai, Gil (10 de mayo de 2010). « Francisco Santos Disproves the Hirsch Conjecture (http:/ / gilkalai. wordpress.
com/ 2010/ 05/ 10/ francisco-santos-disproves-the-hirsch-conjecture/ )». Consultado el 11 de mayo de 2010.• Kalai, Gil; Kleitman, Daniel J. (1992), «A quasi-polynomial bound for the diameter of graphs of polyhedra»,
Bulletin of the American Mathematical Society 26 (2): 315–316, doi: 10.1090/S0273-0979-1992-00285-9 (http:/ / dx. doi.org/ 10. 1090/ S0273-0979-1992-00285-9), arΧiv:math/9204233, MR 1130448 (http:/ / www. ams. org/mathscinet-getitem?mr=1130448).
• Klee, Victor; Walkup, David W. (1967), «The d-step conjecture for polyhedra of dimension d < 6», ActaMathematica 133: 53–78, doi: 10.1007/BF02395040 (http:/ / dx. doi. org/ 10. 1007/ BF02395040), MR 0206823 (http:/ /www. ams. org/ mathscinet-getitem?mr=0206823).
• Naddef, Denis (1989), «The Hirsch conjecture is true for (0,1)-polytopes», Mathematical Programming 45 (1):109–110, doi: 10.1007/BF01589099 (http:/ / dx. doi. org/ 10. 1007/ BF01589099), MR 1017214 (http:/ / www. ams. org/mathscinet-getitem?mr=1017214).
• Santos, Francisco (2010), «A counter-example to the Hirsch conjecture», 100 Years in Seattle: the mathematics ofKlee and Grünbaum.
• Ziegler, Günter M. (1994), «The Hirsch Conjecture», Lectures on Polytopes, Graduate Texts in Mathematics, 152,Springer-Verlag, pp. 83–93.
https://es.wikipedia.org/w/index.php?title=Unificaci%C3%B3n_Comunista_de_Espa%C3%B1a%23Publicaciones
Conjetura de Kepler 172
Conjetura de KeplerLa conjetura de Kepler es una conjetura formulada por el físico, matemático y astrónomo Johannes Kepler en 1611.Esta conjetura afirma que si apilamos esferas iguales, la densidad máxima se alcanza con una apilamiento piramidalde caras centradas. Esta densidad es aproximadamente del 74%.En 1998 Thomas Hales anunció que había demostrado la conjetura de Kepler. Fue publicada en Annals ofMathematics. La comprobación de Hales es una demostración por casos en la que se prueban agrupamientosmediante complejos cálculos de computadora (ordenador). Hales formuló una ecuación de 150 variables que recogíacinco mil posibles agrupamientos de esferas iguales.Los doce científicos seleccionados por Annals para realizar la revisión por pares comentaron que estaban al "99%seguros" de la exactitud de la prueba de Hales, pero que era imposible revisar los tres gigabytes de códigos. Sinembargo, el método utilizado por Hales en la demostración no es exhaustivo, por lo que no está dilucidado elproblema. Por tanto, la conjetura de Kepler está más cerca de convertirse en un teorema.
Enlaces externosEnlaces en castellano• Matemáticalia [1]
• Ejemplo práctico sobre la conjetura de Kepler [2]
Enlaces en inglés• Thomas Hales' home page [3]
• Overview of Hales' proof [4]
• Article in American Scientist by Dana Mackenzie [5]
Referencias[1] http:/ / www. matematicalia. net/ index. php?option=com_content& task=view& id=263& Itemid=58[2] http:/ / www. matifutbol. com/ es/ balones. html[3] http:/ / www. math. pitt. edu/ ~thales/[4] http:/ / www. math. pitt. edu/ articles/ cannonOverview. html[5] http:/ / www. americanscientist. org/ template/ AssetDetail/ assetid/ 15497

Conjetura de RamanujanPetersson 173
Conjetura de Ramanujan–PeterssonEn matemática, la conjetura de Ramanujan, llamada así en honor a Srinivasa Ramanujan, postula que loscoeficientes de Fourier de la forma cúspide de valor 12, definida en la teoría de formas modularessatisface que,
donde es un número primo. Esto implica una estimación que sólo es ligeramente más débil para todos los ,es decir, para cualquier . Esta conjetura de Ramanujan fue confirmada mediante la demostración
de las conjeturas de Weil por Deligne (1974). Las formulaciones necesarias para mostrar este resultado fueron comoconsecuencia delicadas y no tan obvias. Esto se debe al trabajo de Michio Kuga con las contribuciones también deMikio Sato, Goro Shimura, y Yasutaka Ihara, seguidos por Deligne (1968). La existencia de dicha conexión inspiróalgunos de los grandes trabajos sobre el tema a finales de la década de 1960, cuando las consecuencias de la teoríasobre la cohomología de Étale estaban siendo elaboradas.La más general conjetura de Ramanujan–Petersson para fórmas cúspides en la teoría de formas modulareselípticas para subgrupos de congruencia tiene una formulación semejante, con un exponente (k − 1)/2 donde k es elvalor de la forma. Estos resultados también se pueden obtener a partir de las conjeturas de Weil, excepto para el caso k = 1, cuyo resultado es debido a Deligne y Jean-Pierre Serre. Es llamada en honor a Hans Petersson (1902 – 1984).En el lenguaje de formas automórficas, una generalización muy amplia puede ser posible; pero ha demostrado serdemasiado optimista, por el caso particular de , es decir, la similitud del grupo de cuatro dimensionesdenominado grupo simpléctico, para la cual han sido encontrados contraejemplos. La forma generalizada apropiadapara la conjetura de Ramanujan está todavía en espera; la formulación de las conjeturas de Arthur está en términospara los cuales se explica el mecanismo que permite cierto tipo de contraejemplos.
AplicacionesLa más famosa aplicación de la conjetura de Ramanujan es la construcción explícita de grafos de Ramanujan porLubotzky, Phillips y Sarnak. En efecto, esta conjetura dio nombre a este tipo de grafos.
Referencias• Deligne, Pierre (1971), «Formes modulaires et représentations l-adiques [1]», Séminaire Bourbaki vol. 1968/69
Exposés 347-363, Lecture Notes in Mathematics, 179, Berlin, New York: Springer-Verlag, doi: 10.1007/BFb0058801[2], ISBN 978-3-540-05356-9
• Deligne, Pierre (1974), «La conjecture de Weil. I. [3]», Publications Mathématiques de l'IHÉS 43: 273–307, doi:
10.1007/BF02684373 [4], MR 0340258 [5], ISSN 1618-1913 [6]
Referencias[1] http:/ / www. numdam. org/ item?id=SB_1968-1969__11__139_0[2] http:/ / dx. doi. org/ 10. 1007%2FBFb0058801[3] http:/ / www. numdam. org/ item?id=PMIHES_1974__43__273_0[4] http:/ / dx. doi. org/ 10. 1007%2FBF02684373[5] http:/ / www. ams. org/ mathscinet-getitem?mr=0340258[6] http:/ / worldcat. org/ issn/ 1618-1913

Conjetura débil de Goldbach 174
Conjetura débil de GoldbachEn teoría de números, la conjetura débil de Goldbach afirma que:
Todo número impar mayor que 5 puede expresarse como suma de tres números primos.
(Se puede emplear el mismo número primo más de una vez en esta suma.)Esta conjetura recibe el nombre de «débil» porque la conjetura fuerte de Goldbach sobre la suma de dos númerosprimos, si se demuestra, demostraría automáticamente la conjetura débil de Goldbach. Esto es así porque si cadanúmero par mayor que 4 es la suma de dos primos impares, se puede añadir tres a los números pares mayores que 4para producir los números impares mayores que 7.Algunos expresan la conjetura como:
Todo número impar mayor que 7 puede expresarse como suma de tres números primos impares.Esta versión excluye la solución 7 = 2+2+3, ya que requiere el numero 2, el único número primo par. Lademostración de Harald Helfgott cubre ambas versiones de la conjetura, aunque su trabajo se encuentra bajo revisiónpor pares.
HistoriaEsta conjetura data de 1742 [1]. Esta conjetura dice que todo número natural mayor que 3 es suma de dos númerosprimos. Consta en una carta de Golbach a Euler en 1742. Apareció publicada sin prueba en 1770, en Gran Bretaña,en las Meditationes algebraicae de Edward Waring (1734-1793). Este fue senior wrangler en la universidad deCambridge en 1757 y fue lancasian professor en la citada universidad desde 1760. Las Meditationes algebraicaecontiene aún otra conjetura complementaria que expresa que todo entero impar o es primo o suma o suma de tresprimos[2]. Esta es la llamada conjetura débilEn 1923, Hardy y Littlewood mostraron que, suponiendo una cierta generalización de la hipótesis de Riemann, laconjetura débil de Goldbach es cierta para todos los números impares suficientemente grandes. En 1937, elmatemático ruso Iván Matvéyevich Vinográdov fue capaz de eliminar la dependencia de la hipótesis de Riemann ydemostró directamente que todos los números impares suficientemente grandes pueden escribirse como suma de tresprimos. Chen Jing-run probó que cada número suficientemente grande es la suma de un primo con un número que noposee más de dos divisores primos [3].Aunque Vinográdov no pudo determinar lo que significaba «suficientemente grande» con exactitud, su alumno K.Borodzin demostró que 314.348.907 es una cota superior para el concepto de «suficientemente grande». Este númerotiene más de seis millones de dígitos, así que comprobar la conjetura en cada número por debajo de esta cota seríaimposible. Afortunadamente, en 1989 Wang y Chen redujeron esta cota a 1043.000. Esto significa que si cada uno delos números impares menores que 1043.000 resulta ser la suma de tres números primos, entonces la conjetura débil deGoldbach quedará demostrada. Sin embargo, aún se debe reducir bastante esta cota antes de poder comprobarse cadanúmero por debajo de la misma.En 1997, Deshouillers, Effinger, Te Riele y Zinoviev mostraron que la hipótesis generalizada de Riemann implica laconjetura débil de Goldbach. Este resultado combina una afirmación general válida para números mayores que 1020
con una búsqueda minuciosa informatizada de los casos pequeños.Olivier Ramaré mostró en 1995 que todo número par mayor que cuatro (n≥4) es de hecho la suma de, como mucho,seis primos, de lo que se sigue que cada número impar n ≥ 5 es la suma de como máximo, siete primos. LeszekKaniecki mostró que todo entero impar es la suma de como máximo, cinco primos, bajo la condición de la hipótesisde Riemann. En 2012, Terence Tao demostró esto sin la necesidad de la hipótesis de Riemann; esto mejora ambosresultados.
Conjetura débil de Goldbach 175
DemostraciónDos trabajos publicados en los años 2012 y 2013 por el matemático peruano afincado en Francia Harald Helfgott,que reivindican la mejora de las estimaciones de los arcos mayores y menores, se consideran suficientes parademostrar incondicionalmente la conjetura débil de Goldbach.[4] De este modo la conjetura queda demostradadespués de 271 años.. De modo que dicha conjetura pasa a ser un teorema, i. e. una proposición cuya verdad sepuede demostrar [5]. Su trabajo aun está bajo revisión por pares.
Referencias[1][1] Introducción a la teoría analítica de números, T.M: Apostol ISBN 84-291-5006-4 pg. 380[2][2] "Historia de la matemática de Charles Boyer", ISBN 84-206-9094-X pg. 576[3][3] Introducción a la teoría analítica de números, T.M: Apostol ISBN 84-291-5006-4 pg. 380[4] http:/ / www. truthiscool. com/ prime-numbers-the-271-year-old-puzzle-resolved[5][5] El Comercio. Lima, 28 de mayo de 2013 pg.A7
• Deshouillers; Effinger; Te Riele; Zinoviev (1997). « A complete Vinogradov 3-primes theorem under theRiemann hypothesis (http:/ / www. ams. org/ era/ 1997-03-15/ S1079-6762-97-00031-0/ S1079-6762-97-00031-0.pdf)». Electronic Research Announcements of the American Mathematical Society 3: pp. 99-104. Consultado el24 de mayo de 2013.
Enlaces externos• Weisstein, Eric W. « Goldbach Conjecture (http:/ / mathworld. wolfram. com/ GoldbachConjecture. html)» (en
inglés). MathWorld. Wolfram Research.
Hipótesis generalizada de RiemannLa hipótesis de Riemann es una de las conjeturas más importantes de la matemáticas. Es un postulado sobre los cerosde la función zeta de Riemann.Existen varios objetos geométricos y aritméticos que pueden ser descritos por las llamadas funciones-L globales, lascuales son similares de manera formal a la función zeta de Riemann. Por lo tanto uno puede hacerse la mismapregunta sobre los ceros de estas funciones-L, lo que conduce a varias generalizaciones de la hipótesis de Riemann.Muchos matemáticos creen que estas generalizaciones de la hipótesis de Riemann son verdaderas. Los únicos casosde estas conjeturas que se han podido demostrar ocurren en el caso del cuerpo de funciones (no en el caso del cuerpode números).Las funciones-L globales pueden estar asociadas a curvas elípticas, cuerpos numéricos (en cuyo caso se las llamafunciones zeta de Dedekind), Formas de onda de Maass, y caracteres de Dirichlet (en cuyo caso se las llamafunciones L de Dirichlet). Cuando la hipótesis de Riemann se formula para funciones zeta de Dedekind, se la conocepor el nombre de hipótesis extendida de Riemann y cuando se la formula para funciones-L de Dirichlet, se laconoce por el nombre de hipótesis generalizada de Riemann. Estas dos situaciones son analizadas con mayordetalle en las siguientes secciones. (Muchos matemáticos utilizan el nombre hipótesis generalizada de Riemann parareferirse a la extensión de la hipótesis de Riemann a todas las funciones-L globales, no solo para el caso especial delas funciones-L de Dirichlet.)
Hipótesis generalizada de Riemann 176
Hipótesis generalizada de Riemann (HGR)La hipótesis generalizada de Riemann (para las funciones-L de Dirichlet) fue probablemente enunciada por primeravez por Piltz en 1884.Al igual que la hipótesis original de Riemann, posee consecuencias que abarcan a la distribución de los númerosprimos.El enunciado formal de la hipótesis es el siguiente. Un carácter de Dirichlet es una función aritmética completamentemultiplicativa χ tal que existe un entero positivo k con χ(n + k) = χ(n) para todo n y χ(n) = 0 siempre que mcd(n, k) >1. Si tal carácter existe, se define la función-L de Dirichlet correspondiente mediante
para todo número complejo s con parte real > 1. Mediante extensión analítica, esta función puede ser extendida a unafunción meromorfa definida sobre todo el plano complejo. La hipótesis generalizada de Riemann establece que paratodo carácter de Dirichlet χ y todo número complejo s con L(χ,s) = 0: si la parte real de s se encuentra comprendidaentre 0 y 1, entonces es 1/2.El caso χ(n) = 1 para todo n conduce a la hipótesis ordinaria de Riemann.
Consecuencias de la HGRUna sucesión aritmética en los números naturales es un conjunto de números del tipo a, a+d, a+2d, a+3d, ... donde ay d son números naturales y d es distinto de cero. El Teorema de Dirichlet establece que si a y d son coprimos,entonces dicha sucesión aritmética contiene infinitos números primos. Si π(x,a,d) es la cantidad de números primosen dicha sucesión que son menores o iguales a x. Si la hipótesis generalizada es verdadera, entonces para cadacoprimo a y d y para cada ε > 0
donde φ(d) es la función phi de Euler y O es el símbolo de Landau. Esto constituye un refuerzo significativo delteorema de los números primos, y constituye el teorema de los números primos para progresiones aritméticas.Si la HGR es verdadera, entonces para cada primo p existe una raíz primitiva módulo p (un generador del grupomultiplicativo de enteros módulo p) que es menor que 70 (ln(p))2; lo que se suele utilizar en numerosasdemostraciones.La conjetura débil de Goldbach también se deduce a partir de la hipótesis generalizada de Riemann.Si la HGR es verdadera, entonces se puede asegurar que el test de primalidad de Miller-Rabin corre en tiempopolinómico. (Recientemente se ha publicado el test de primalidad AKS, que es un test de primos en tiempopolinómico que no requiere de la HGR.)Si la HGR es verdadera, entonces se garantiza que el algoritmo de Shanks-Tonelli corre en tiempo polinómico. Elalgoritmo de Shanks-Tonelli resulta útil para encontrar soluciones de: donde n es un residuocuadrático mod p, p es primo y x es la variable incógnita. Dicho algoritmo es un paso importante en el algoritmo defactorización de la criba cuadrática (Carl Pomerance).Suponiendo que la HGR sea verdadera, el estimado de la suma de caracteres en la desigualdad de Pólya-Vinogradovpuede mejorarse a , siendo q el módulo del carácter.
Hipótesis generalizada de Riemann 177
Hipótesis extendida de Riemann (HER)Suponiendo que K es un cuerpo de números algebraicos (una extensión de cuerpo de dimensión finita de los númerosracionales Q) con anillo de los enteros OK (este anillo es la clausura integral de los enteros Z en K). Si a es un anilloideal de OK, distinto del cero ideal denominamos a su norma Na. La función zeta de Dedekind de K está definidamediante
para todo número complejo s con parte real > 1. La suma se extiende sobre todos los ideales no nulos a de OK.La función zeta de Dedekind satisface una ecuación funcional y puede ser extendida mediante una extensiónanalítica a todo el plano complejo. La función resultante contiene información importante sobre el cuerpo numéricoK. La hipótesis extendida de Riemann establece que para todo campo numérico K y todo número complejo s conζK(s) = 0: si la parte real de s se encuentra entre 0 y 1, entonces vale 1/2.La hipótesis ordinaria de Riemann se obtiene a partir de la extendida si se toma el campo de los números como Q,con el anillo Z de los números enteros.
Enlaces externos• Hazewinkel, Michiel, ed. (2001), «Riemann hypothesis, generalized [1]» (en inglés), Encyclopaedia of
Mathematics, Springer, ISBN 978-1556080104
• Weisstein, Eric W. «Generalized Riemann Hypothesis [2]» (en inglés). MathWorld. Wolfram Research.
Referencias[1] http:/ / www. encyclopediaofmath. org/ index. php?title=R/ r081940[2] http:/ / mathworld. wolfram. com/ GeneralizedRiemannHypothesis. html
Hipótesis H de Schinzel 178
Hipótesis H de SchinzelEn matemáticas, la hipótesis H de Schinzel es una generalización muy amplia de conjeturas tales como la de losnúmeros primos gemelos. La hipótesis aspira a definir el ámbito más amplio que puede tener una conjetura de lanaturaleza de que una familia
fi(n)de valores de polinomios irreducibles f(t) deba poder tomar valores primos simultáneamente para números enteros nque pueden ser arbitrariamente grandes. Dicho de otra manera, debería haber infinitos números n, para cada uno delos cuales
fi(n)toma como valor un número primo.
Limitaciones necesariasUna conjetura de esta naturaleza debe estar sujeta a ciertas condiciones necesarias. Por ejemplo, si se consideran lospolinomios x+4 y x+7, no hay ningún n > 0 para el cual tanto n+4 como n+7 son primos. Esto es así porque uno delos dos será siempre un número par mayor que 2, y por tanto compuesto, y el otro un número impar. El objetivoprincipal de la formulación de esta conjetura es poder descartar estos casos.
Divisores fijosEsto se puede lograr utilizando el concepto de polinomio de valores enteros. Esto nos permite afirmar que unpolinomio que toma valores enteros Q(x) tiene un divisor fijo m si existe un número entero m > 1 tal que
Q(x)/mtambién es un polinomio que toma valores enteros. Por ejemplo,
(x + 4)(x + 7)tiene el divisor fijo 2.Tales divisores fijos deben ser descartados de
Q(x) = Π fi(x)para cualquier conjetura, ya que su presencia contradice la posibilidad de que los fi(n) puedan ser todos primos paravalores grandes de n.
Formulación de la hipótesis HPor consiguiente, la formulación estándar de la hipótesis H es la siguiente: dado un polinomio Q con las condicionesdescritas anteriormente y sin divisor primo fijo, entonces todos los fi(n) serán simultáneamente primos en infinitasocasiones, para cualquier elección de polinomios de coeficientes enteros fi(x) cuyo término de mayor grado tienecoeficiente positivo.Si el coeficiente del término de mayor grado fuera negativo, cabría esperar valores primos negativos. Se trata enrealidad de una restricción inocua. Probablemente no hay ninguna razón real para restringirnos a los polinomios decoeficientes enteros en lugar de los que toman valores enteros. La condición de no tener ningún divisor primo fijo sepuede comprobar efectivamente en un caso dado, ya que hay una base explícita para los polinomios de valoresenteros. Por ejemplo,
x2 + 1
no tiene divisor primo, por lo que cabría esperar que hay infinitos primos de la forma

Hipótesis H de Schinzel 179
n2 + 1.
Sin embargo, esto no se ha probado. Es una de las conjeturas de Landau.
AplicacionesLa hipótesis probablemente no es accesible con los métodos actuales que se utilizan en teoría analítica de números,pero se emplea con relativa frecuencia para demostrar resultados condicionales, por ejemplo en la geometríadiofántica. Al tratarse de una conjetura tan fuerte, es posible que demostrarla sea mucho esperar.
Extensión para incluir la conjetura de GoldbachLa hipótesis no cubre la conjetura de Goldbach, pero una versión relacionada, la hipótesis H
N, sí lo hace. Esto
requiere la inclusión de un nuevo polinomio, F(x), que, en el problema de Goldbach, equivaldría simplemente a x,para lo cual se requeriría que
N − F(n)fuera también un número primo. Esto se cita en Sieve Methods ("métodos de criba"), de Halberstam and Richert.Aquí, la conjetura toma la forma de un enunciado cuando N es suficientemente grande, y está sujeto a la condiciónde que
Q(n)(N − F(n))no tiene divisor fijo > 1. Entonces, deberíamos ser capaces de requerir la existencia de n tal que N − F(n) sea a la vezpositivo y primo, y tal que todos los fi(n) sean primos.No se conocen muchos casos de estas conjeturas, pero existe una teoría cuantitativa detallada, la conjetura deBateman-Horn.
Análisis localLa condición de que no haya ningún divisor primo fijo es puramente local (es decir, depende únicamente de losprimos). En otras palabras, se conjetura que un conjunto finito de polinomios irreducibles que tomen valores enterossin ninguna obstrucción local para tomar infinitos valores primos tomará efectivamente infinitos valores primos.
Una analogía que fallaLa conjetura análoga en que los enteros son reemplazados por el anillo polinómico de una variable sobre un cuerpofinito es falsa. Por ejemplo, Swan observó en 1962, por motivos no relacionados con la hipótesis H, que el polinomio
sobre el anillo es irreducible y no tiene ningún divisor primo fijo (después de todo, para x = 0 y x = 1 tomacomo valor sendos polinomios primos entre sí), pero todos los valores que toma cuando x recorre soncompuestos. Se pueden encontrar ejemplos similares si se reemplaza por cualquier cuerpo finito; lasobstrucciones en una formulación correcta de la hipótesis H sobre F[u], donde F es un cuerpo finito, ya no sonsolamente locales, sino que se produce una obstrucción global sin analogía clásica.
Hipótesis H de Schinzel 180
Enlaces externos• Publicaciones [1] del matemático polaco Andrzej Schinzel. La hipótesis proviene del 25º artículo de la lista,
escrito en coautoría con Sierpiński en 1958.
Referencias[1] http:/ / www. impan. gov. pl/ User/ schinzel/
Conjetura de MertensEn matemáticas, la conjetura de Mertens fue una conjetura según la cual la función de Mertens M(n) estaríaacotada por √n. Fue planteada por Franz Mertens en 1897 y se demostró que era falsa en 1985. La conjetura, dehaberse demostrado cierta, habría implicado la veracidad de la hipótesis de Riemann.
DefiniciónEn teoría de números, se define la función de Mertens como:
donde μ(k) es la función de Möbius, entonces, la conjetura de Mertens afirma que:
HistoriaEn 1885, Stieltjes afirmó haber demostrado este resultado, pero no publicó una demostración, probablemente porquedescubrió que tenía un error. La conjetura fue inicialmente postulada por Franz Mertens en 1897, basándose en losresultados parciales de Stieltjes, publicó un documento en el que opinaba que «era probable que fuese cierta».Sin embargo, en 1985, te Riele y Odlyzko demostraron que la conjetura de Mertens es falsa.La conjetura de Mertens es interesante, porque, si se hubiese demostrado su veracidad, eso habría implicado que lafamosa hipótesis de Riemann también era cierta.
Conexión con la hipótesis de RiemannEl nexo con la hipótesis de Riemann se basa en el hecho de que se puede derivar el resultado
donde ζ(z) es la función zeta de Riemann. La conjetura de Mertens significaría que esta integral converge para Re(z)> 1/2, lo que a su vez implicaría que 1/ζ(z) está definido para Re(z) > 1/2 y por simetría para Re(z) < 1/2. Así, losúnicos ceros de ζ(z) estarían en Re(z) = 1/2, como dice la hipótesis de Riemann.
Referencias
Número de Euclides 181
Número de EuclidesEn matemáticas, los números de Euclides son números naturales de la forma En = pn# + 1, donde pn# es el primorialde pn, que a su vez es el n-ésimo número primo. Reciben su nombre en honor al antiguo matemático griego Euclides.A veces se cree erróneamente que el teorema de Euclides de la infinitud de los números primos se basa en estosnúmeros. De hecho, la demostración original de Euclides no presupone que el conjunto de todos los números primossea finito. Más bien considera un conjunto finito de números primos, que no tiene por qué contener los n primerossino que podría perfectamente contener, por ejemplo, los números 3, 41 y 53. Es de ahí que razona que debe haber almenos un número primo que no está en la lista.Los primeros números de Euclides son 3, 7, 31, 211, 2311, 30031, 510511 (sucesión A006862 [1] en OEIS).E6 = 13# + 1 = 30031 = 59 x 509 es el primer número de Euclides compuesto, con lo que se sabe que no todos losnúmeros de Euclides son primos. No se sabe si existen infinitos números de Euclides que sean a su vez primos.Un número de Euclides no puede ser un cuadrado perfecto.Para todo n ≥ 3, la última cifra de En es 1, ya que En − 1 es divisible entre 2 y 5.
Referencias[1] http:/ / oeis. org/ A006862
Conjetura de PólyaEn matemáticas, la conjetura de Pólya es una hipótesis que plantea que la mayoría de los números naturales (másdel 50% de ellos) menores que cualquier número dado, tienen una cantidad impar de factores primos. La conjeturafue propuesta por el matemático húngaro George Pólya en 1919, y se demostró su falsedad en 1958. El tamaño delmenor contra-ejemplo es usualmente usado para mostrar cómo una conjetura puede ser cierta para muchos números,y aun así ser falsa.
EnunciadoLa conjetura de Pólya enuncia que:
Para cualquier n (> 1), si dividimos los números naturales menores o iguales a n (excluyendo el 0) poraquellos que tienen un número impar de factores primos, y si análogamente los dividimos por aquellos quetienen un número par de factores primos, entonces el primer conjunto tiene más elementos que el último, obien, tienen igual cantidad de elementos.
De manera equivalente, se puede enunciar la conjetura, en términos de la función de Liouville:
Para todo n. Aquí, es positivo si el número de factores primos del entero k es par, y negativo sies impar. La función Omega cuenta el total de factores primos de un entero.
Conjetura de Pólya 182
RefutaciónLa conjetura fue demostrada falsa por C. B. Haselgrove en 1958. Demostró que la conjetura tiene un contraejemplo,el que estimó alrededor de 1.845 × 10361.Un contraejemplo explícito, con n = 906.180.359 fue dado por R. S. Lehman en 1960; el contraejemplo más pequeñoes n = 906.150.257, encontrado por Minoru Tanaka en 1980.La conjetura de Pólya falla para la mayoría de los valores de en la región de 906.150.257 ≤ n ≤ 906.488.079. enesta región, la función alcanza un valor máximo de 829 en n = 906.316.571.
Enlaces externos• G. Pólya, "Verschiedene Bemerkungen zur Zahlentheorie." Jahresbericht der deutschen Math.-Vereinigung 28
(1919), 31-40.• Haselgrove, C.B. (1958). «A disproof of a conjecture of Pólya». Mathematika 5: pp. 141–145.• R.S. Lehman, On Liouville's function. Math. Comp. 14 (1960), 311-320.• M. Tanaka, A Numerical Investigation on Cumulative Sum of the Liouville Function. Tokyo Journal of
Mathematics 3, (1980) 187-189.
Sucesión de Euclides-MullinLa sucesión de Euclides-Mullin es una sucesión infinita de números primos distintos dos a dos, en la cual cadatérmino es el factor primo más pequeño de uno más el producto de todos los términos anteriores.Los 43 primeros términos de la sucesión son (sucesión A000945 [1] en OEIS):
2, 3, 7, 43, 13, 53, 5, 6221671, 38709183810571, 139, 2801, 11, 17, 5471, 52662739, 23003,30693651606209, 37, 1741, 1313797957, 887, 71, 7127, 109, 23, 97, 159227,643679794963466223081509857, 103, 1079990819, 9539, 3143065813, 29, 3847, 89, 19, 577, 223, 139703,457, 9649, 61, 4357
A fecha de 2008, sólo se conocen esos términos. Encontrar el siguiente implica encontrar el factor primo máspequeño de un número de 180 cifras que se sabe compuesto.
DefiniciónSi an denota el n-ésimo término de la sucesión, entonces an es el factor primo más pequeño de
El primer término es por tanto el factor primo más pequeño del producto vacío más uno, es decir, 2. El 13 en lasucesión es el menor de los factores primos de 2 × 3 × 7 × 43 + 1 = 1806 + 1 = 1807 = 13 × 139.
Sucesión de Euclides-Mullin 183
PropiedadesEsta sucesión es infinita y no contiene elementos repetidos. Esto se puede demostrar mediante el método que utilizóEuclides de que hay infinitos números primos. De hecho, esta demostración es constructiva, y esta sucesión es elresultado de llevar a cabo una versión de dicha construcción.
ConjeturaSe conjetura que todos los números primos son términos de la sucesión de Euclides-Mullin. Sin embargo, no se sabecómo se podría demostrar esto. El número primo más pequeño que no se sabe si forma parte de la sucesión es el 31.La posición de los números primos del 2 al 97 en la sucesión es:
1, 2, 7, 3, 12, 5, 13, 36, 25, 33, ?, 18, ?, 4, ?, 6, ?, 42, ?, 22, ?, ?, ?, 35, 26 (A056756)donde ? indica que se desconoce el orden del número primo correspondiente e incluso si está en la sucesión a fechade 2008. (El listado con los signos de interrogación aparece en el campo "Extensions", sin embargo, la lista principalse detiene en el 33 y no incluye signos de interrogación).
Enlaces externos• Factoring 43rd Term of Euclid-Mullin sequence [2], factorización de los números para los cuales los elementos de
la sucesión son el factor más pequeño.• Weisstein, Eric W. «Euclid–Mullin Sequence [3]» (en inglés). MathWorld. Wolfram Research.
Referencias[1] http:/ / oeis. org/ A000945[2] http:/ / mersenneforum. org/ showpost. php?p=60960& postcount=65[3] http:/ / mathworld. wolfram. com/ Euclid-MullinSequence. html

Cohomología de Čech 184
Cohomología de ČechEn matemáticas, específicamente la topología algebraica, la Cohomología de Čech es una teoría de cohomologíabasada en las propiedades de conjuntos abiertos y recubrimientos de espacio topológico. Se llama así por elmatemático de la República Checa llamado Eduard Čech.
MotivaciónSea X un espacio topológico, y sea un recubrimiento de X. Define un complejo simplicial , llamado elnervio del recubrimiento de la siguiente manera que:• Hay un vértice para cada elemento de .• Hay un límite para cada par de de tal manera que .• En general, existe un k-simplex para cada k+1-subconjuntos del elemento de para que
.Geométricamente el nervio es esencialmente un "complejo dual" (en el sentido de un grafo dual o dualidadde Poincaré) para el recubrimiento de .La idea de la cohomología de Čech es que, si optamos por un recubrimiento que es lo suficiente pequeño deconjuntos abiertos conectados, el resultado complejo simplicial de debe ser un buen modelo de combinatoriapara el espacio X. Para tal recubrimiento, la cohomología Čech de X se define como la cromología simplicial delnervio.Esta idea puede ser formalizada por la noción de un buen recubrimiento, por lo que todo conjunto abierto y cadaintersección finita de conjuntos abiertos es contráctil. Sin embargo, un enfoque más general es tomar el límitedirecto de los grupos de cohomología del nervio sobre el sistema de todos los recubrimientos de X, ordenados por elrefinamiento. Este es el enfoque adoptado por debajo.
ConstrucciónSea X un espacio topológico y deja que sea un prehaz de los grupos abelianos de . deja de ser unarecubrimiento de .
Simplex
Una q-simplex de es una colección ordenada de de los conjuntos seleccionados de , de tal maneraque la intersección de todos estos conjuntos no está vacía. Esta intersección se llama el soporte de y su denotaciónes .Ahora vamos a que es un q-simplex. El j-ésimo límite parcial de es decir:
El límite de se define como la suma alterna de los límites parciales:

Cohomología de Čech 185
CocadenasUna q-cocadena de con coeficientes en es un mapa que asocía a cada q-simplex &sigma un elemento de
y denotamos el conjunto de todas las q-cocadenas de con coeficientes en por .es un grupo abeliano por adición puntual.
Referencias• Bott, Raoul; Loring Tu (1982). Differential Forms in Algebraic Topology. New York: Springer. ISBN 0-387-90613-4.• Hatcher, Allen (2002). Algebraic Topology [1]. Cambridge University Press. ISBN 0-521-79540-0. Para una mayor
discusión de los espacios de Moore, véase el Capítulo 2, Ejemplo 2.40.• Wells, Raymond (1980). Differential Analysis on Complex Manifolds. Springer-Verlag. ISBN 0-387-90419-0.
ISBN 3-540-90419-0. Capítulo 2 Apéndice A
Referencias[1] http:/ / www. math. cornell. edu/ ~hatcher/ AT/ ATpage. html
CohomologíaEn matemáticas, específicamente en topología algebraica, cohomología es un término genérico para una sucesión degrupos abelianos definidos a partir de una co-cadena compleja. O sea, la cohomología se define como el estudioabstracto de co-cadenas, cociclos, y cofronteras. La cohomología puede ser pensada como un método de asignaciónde invariantes algebraicos a un espacio topológico que posee una estructura algebraica más refinada que la que tienehomología. La cohomología surge de una dualización algebraica de la construcción de la homología. En términosmenos abstractos, las co-cadenas en su sentido fundamental deben asignar 'cantidades' a las cadenas de la teoría dehomología.Desde sus comienzos en la topología, esta idea se convirtió en un método destacado en las matemáticas de lasegunda mitad del siglo XX; comenzando por la idea inicial de homología como una relación invariante topológicasobre las cadenas, el rango de aplicaciones de las teorías de homología y cohomología se ha extendido sobre lageometría y el álgebra abstracta. La terminología tiende a ocultar el hecho que en muchas aplicaciones lacohomología, una teoría contravariante, es más natural que una homología. En un nivel básico esto se relaciona conlas funciones y pullbacks en situaciones geométricas: dados dos espacios X e Y, y algún tipo de función F en Y, paratodo mapeo f: X → la composición de Y con f crea una función F o f en X. Los grupos de cohomología muchas vecestambién poseen un producto natural, el producto exterior o producto cuña, el cual les otorga una estructura de anillo.En realidad, una teoría de homología general debería haber tenido un significado amplio que abarcara tanto a lahomología y a la cohomología: al fin de cuentas la dirección de las flechas en una cadena compleja no es más queuna convención de signos.
Recubrimiento (matemática) 186
Recubrimiento (matemática)En matemática, una colección de subconjuntos A de un conjunto X es un recubrimiento, cubrimiento o cubierta deX, si la unión de los elementos de la colección A es igual a X. Además, si los subconjuntos de X de dicha colección Asatisfacen el ser disjuntos por pares, A es llamada partición de X.Si el conjunto X tiene estructura de espacio topológico, el recubrimiento, cubrimiento o cubierta A es llamadorecubrimiento abierto, etc. si cada elemento de A es un conjunto abierto en X. Análogamente para otraspropiedades como cerrado, compacto, convexo, conexo, numerable, finito, infinito, etc.
Conceptos relacionadosUn conjunto X se dice compacto si cada recubrimiento abierto de X contiene una subcolección finita la cual tambiénes recubrimiento de X.Un recubrimiento de X se dice localmente finito si todo punto de X tiene un entorno que interseca sólo un númerofinito de conjuntos del recubrimiento. Expresado con símbolos, C = Uα es localmente finito si para todo x ∈ X,existe N(x), entorno de x tal que
es finito.Subrecubrimiento y refinamientoSi C es un recubrimiento de un espacio topológico X, un subrecubrimiento de C es un subconjunto C (formado portanto por elementos de C ) que todavía recubre X.Un refinamiento de un recubrimiento C de X es un nuevo recubrimiento D de X tal que todo conjunto de D estécontenido en algún conjunto de C. En símbolos, es un refinamiento de cuando
.Obsérvese cómo un subrecubrimiento está formado una selección de elementos del recubrimiento, mientras que unrefinamiento está formado por conjuntos que son subconjuntos de los conjuntos del recubrimiento. Todosubrecubrimiento es también un refinamiento, pero no viceversa.
Referencias• Munkres, James; Topology, Prentice Hall; 2nd edition (December 28, 1999). ISBN 0-13-181629-2.

Espacio topológico 187
Espacio topológico
Cuatro ejemplos y dos anti-ejemplos detopologías en el conjunto de tres puntos 1,2,3.El ejemplo inferior izquierdo no es una topología
porque la unión 2 y 3, igual a 2,3, no esparte de la colección.
El ejemplo inferior derecho tampoco es unatopología porque la intersección de 1,2 y 2,3,
igual a 2, no es parte de la colección.
Un espacio topológico es una estructura matemática que permite ladefinición formal de conceptos como convergencia, conectividad, ycontinuidad. La rama de las matemáticas que estudia los espaciostopológicos se llama topología. Las variedades, al igual que losespacios métricos son especializaciones de espacios topológicos conrestricciones y estructuras propias.
Definición
Los espacios topológicos no son más que un conjunto compuesto deciertos subconjuntos (que serán llamados conjuntos abiertos) y quesatisfacen cada una de las tres propiedades descritas a continuación.Una definición formal incluye que un espacio topológico es unconjunto E de elementos, junto con T, una colección de subconjuntosde E que satisfacen las siguientes propiedades:
1. El conjunto vacío y E pertenecen a T.
2. La intersección de cualquier colección finita de conjuntos de T pertenece también en T.
3. La unión de toda colección de conjuntos de T pertenece también en T.
Esta condición también se puede escribir:
Los conjuntos en T son los conjuntos abiertos, y sus complementos en E son llamados conjuntos cerrados.La colección T es llamada "topología" en E. Los elementos de E suelen llamarse puntos, aunque pueden sercualquiera de los objetos matemáticos. Un espacio topológico en el cual los puntos son funciones es llamado unespacio funcional.Al conjunto E se le llama substrato del espacio topológico.
Ejemplos• Topología trivial o indiscreta: es la formada por y .• Topología discreta: es la formada por el conjunto de las partes de .• Topología de los complementos finitos: es la formada por y los conjuntos de , cuyos complementarios
son finitos.• Topología de los complementos numerables: es la formada por y los conjuntos de , cuyos
complementarios son numerables.• R, conjunto de los reales, y T el conjunto de los intervalos abiertos en el sentido usual, y de las reuniones
(cualesquiera) de intervalos abiertos.En este caso un conjunto es abierto si para todo punto de él existe unintervalo abierto que contiene al punto y dicho intervalo abierto es parte del mencionado abierto [1].
• Recta de Sorgenfrey: la recta real junto con la topología del límite inferior

Espacio topológico 188
Espacios metrizablesToda métrica permite definir de manera natural en un espacio la topología formada por las uniones arbitrarias debolas de centro y radio :
Esta topología se aproxima a la noción intuitiva de conjunto abierto, permitiendo una aproximación de carácter locala la topología.En vez de considerar todo el conjunto, el punto de vista local consiste en preguntarse: ¿qué relación tiene que haberentre un punto a cualquiera de A, y A para que A sea un abierto?Si se considera el ejemplo más conocido, el de los intervalos, uno se dacuenta de que los intervalos abiertos son los que no contienen puntosen su frontera o borde, que son puntos en contacto al la vez con A ycon su complementario R - A.
En otras palabras, un punto de un abierto no está directamente encontacto con el "exterior".No estar en contacto significa intuitivamente que hay una ciertadistancia entre el punto y el exterior; llamémosla d. Entonces la bola B(a, d/2), de radio d/2 y de centro a está incluida en A y no toca elcomplementario. En la figura, a está en el interior de A, mientras que b está en su frontera, porque cualquiervecindad de b encuentra R - A.
Al hablar de distancia, utilizamos un concepto de los espacios métricos, que son más intuitivos pues corresponden almundo real (asimilable a R³). En topología, tenemos que cambiar el concepto de bola por el, más general, devecindad o entorno. Una vecindad de un punto x es este punto con algo de su alrededor. Tenemos entera libertad paradefinir el significado de "alrededor" y "vecindad" con tal de satisfacer los axiomas siguientes:1.1. x pertenece a todas sus vecindades.2.2. Un conjunto que contiene una vecindad de x es una vecindad de x.3.3. La intersección de dos vecindades de x es también una vecindad de x.4.4. En toda vecindad V de x existe otra vecindad U de x tal que V es una vecindad de todos los puntos de U.Llamamos abierto un conjunto que es una vecindad para todos sus puntos.
Los axiomas expuestos en el punto de vista global están verificados:1. E es obviamente una vecindad para todos sus puntos, y ∅ también porque no contiene punto. (Una propiedad
universal: para todo x ... es forzosamente cierta en el conjunto vacío.)2. Una unión de abiertos Oi es un superconjunto de cada Oi, y Oi es una vecindad de todos sus puntos, por lo tanto,
la unión es una vecindad de todos sus puntos, gracias a la propiedad (2).3. Sea x un punto de la intersección de los abiertos O1 y O2. O1 y O2 son abiertos que contienen x y por lo tanto
vecindades de él. Una intersección de vecindades de x es una vecindad de x (propiedad 3), lo que implica que O1O2 es una vecindad de todos sus puntos, y por lo tanto un abierto.

Espacio topológico 189
Propiedades de un espacio topológico•• Compacidad•• Conectividad•• Axiomas de separación
Referencias[1] Mansfield: Introducción a la topología, ISBN 84-205-0450-5
Bibliografía•• Munkres, James; Topology, Prentice Hall; 2nd edition (December 28, 1999). ISBN 0-13-181629-2.
Teorema fundamental de la geometría deRiemannEn geometría de Riemann, el teorema fundamental de la geometría de Riemann establece que dado una variedadde Riemann (o una variedad seudoriemanniana) hay una única conexión libre de torsión que preserva el tensormétrico. Tal conexión se llama conexión de Levi-Civita.Más exactamente:
Sea una variedad de Riemann (o variedad seudoriemanniana) entonces hay una conexión única que satisface las condiciones siguientes:
1. para cualesquiera campos vectoriales tenemos ,donde denota la derivada de la función a lo largo del campo vectorial .
2. para cualesquiera campos vectoriales tenemos , donde denota elcorchete de Lie para los campos vectoriales .
La prueba técnica siguiente presenta una fórmula para los símbolos de Christoffel de la conexión en un conjuntocoordenado local. Para una métrica dada este conjunto de ecuaciones puede llegar a ser algo complicado. Haymétodos más rápidos y más simples de obtener los símbolos de Christoffel para una métrica dada, e.g. con la integralde acción y las ecuaciones asociadas de Euler-Lagrange.
DemostraciónEn esta prueba utilizamos la notación de Einstein.
Considérese el conjunto coordinado local y denotemos por el
campo de los marcos de base.Los componentes son números reales del tensor métrico aplicado a una base, es decir
Para especificar la conexión es suficiente especificar los símbolos de Christoffel .
Puesto que son los campos coordenados vectoriales tenemos que
para todos i y j. Por lo tanto la segunda propiedad es equivalente a

Teorema fundamental de la geometría de Riemann 190
lo cuál es equivalente a para todos los i, j y k.La primera propiedad de la conexión de Levi-Civita (arriba) entonces es equivalente a
.
Esto da la relación única entre los símbolos de Christoffel (que definen la derivada covariante) y los componentesdel tensor métrico.Podemos invertir esta ecuación y expresar los símbolos de Christoffel con un pequeño truco, escribiendo a estaecuación tres veces con una elección práctica de los índices
Sumando, la mayoría de los términos en el lado derecho se cancelan y nos quedamos con
O con el inverso de , definido como (con la delta de Kronecker)
escribimos los símbolos de Christoffel como
Es decir los símbolos de Christoffel (y por lo tanto la derivada covariante) son determinados totalmente por lamétrica, con las ecuaciones que implican la derivada de la métrica.

Tensor métrico 191
Tensor métricoEn geometría de Riemann, el tensor métrico es un tensor de rango 2 que se utiliza para definir conceptos métricoscomo distancia, ángulo y volumen en un espacio localmente euclídeo.
DefiniciónUna vez que se elige una base local, el tensor métrico aparece como una matriz, notada convencionalmente G (véasetambién métrica). La notación gij se utiliza convencionalmente para los componentes del tensor. Así el tensormétrico g se expresa fijada una base coordenada como:
O más cómodamente usando el convenio de sumación de Einstein (que usaremos de aquí en adelante para el restodel artículo como):
En física es muy común escribir la métrica como el cuadrado del elemento de longitud, dado que el tensor essimétrico la notación física es equivalente a la notación anterior:
Longitud, ángulo y volumenLa longitud de un segmento de una curva dada parametrizada por , desde hasta , se define como:
El ángulo entre dos vectores U y V (o entre dos curvas cuyos vectores tangentess U y V ) se define como:
El n-volumen de una región R de una variedad de dimensión n viene dado por la integral extendida a dicha región dela n-forma de volumen:
Para computar el tensor métrico de un conjunto de ecuaciones que relacionan el espacio con espacio cartesiano (gij =ηij: vea delta de Kronecker para más detalles), compute el jacobiano del conjunto de ecuaciones, y multiplique el(producto exterior) transpuesto de ese jacobiano por el jacobiano.
Ejemplos de métricas euclídeasUna métrica euclídea no es otra cosa que una métrica arbitraria definida sobre un espacio euclídeo. Un espacio métrico es euclídeo si en el tensor de curvatura es idénticamente nulo en todo el espacio. Cuando se usan coordenadas cartesianas en un espacio euclídeo las componentes del tensor tensión son constantes y, por tanto, los símbolos de Christoffel son también nulos. Sin embargo, en muchos problemas conviene usar otro tipo de coordenadas, como por ejemplo las coordenadas polares, cilíndricas o esfércias, en este caso aun cuando el espacio

Tensor métrico 192
es euclídeo las componentes del tensor métrico expresado en estas coordenadas no son constantes, y los símbolos deChristoffel no se anulan. A continuación se dan algunos ejemplos de coordenadas frecuentes.Los sistemas de coordenadas ortogonales se caracterizan porque en esos el tensor métrico tiene una forma diagonal.A continuación se presentan ejemplos de métricas para un espacio euclídeo, el hecho de que el espacio es localmenteeuclídeo queda reflejado en que el tensor de curvatura calculado para todas las métricas que siguen es idénticamentenulo.
Coordenadas cartesianasDado un tensor métrico euclidiano en dos dimensiones, dado en coordenadas cartesianas :
Puesto que y .La longitud de una curva C parametrizada mediante el parámetro t se reduce a la fórmula familiar del cálculo(teorema de Pitágoras):
o bien en la notación más familiar:
Coordenadas polares
Coordenadas polares:
Coordenadas cilíndricas
Coordenadas cilíndricas:
Tensor métrico 193
Coordenadas esféricas
Coordenadas esféricas:
Ejemplos de métricas no euclídeasTodos los ejemplos anteriores están asociados a métricas euclídeas, caracterizadas por el hecho de que el tensor decurvatura se anula idénticamente en todos los puntos.
Métricas no euclídeas en geometríaSobre una esfera de radio R, parametrizada por el ángulo polar y el ángulo azimutal (θ, φ) se suele considerar eltensor métrico inducido por la distancia euclídea del espacio tridimensional que contiene a la esfera:
Puede probarse que mediante ninguna transformación posible de coordenadas el tensor métrico en esas coordendasserá igual al tensor métrico del espacio euclídeo bidimensional, lo cual evidencia que ese tensor representa unageometría no euclídea (además su curvatura escalar es precisamente 1/R). Puede probarse que dada una curva sobredicha esfera , su longitud viene dada:
Además sucede que fijados dos puntos sobre la esfera la curva de distancia mínima entre dos puntos, es además unacurva con curvatura mínima. La curva de longitud mínima entre dos puntos de una esfera puede obtenerse buscandola intersección de un plano que contenga a los dos puntos y al centro de la esfera, entonces la interasección entredicho plano y la esfera es un círculo máximo, y por tanto con radio máximo R (y, por tanto, de curvatura 1/Rmínima).Una curva de curvatura mínima o longitud mínima en una variedad riemanniana se denomina geodésica. Y en unaesfera pensada como variedad riemanniana los círculos máximos son curvas geodésicas.
Métricas no euclídeas en físicaDe acuerdo con la teoría de la relatividad general en presencia de materia, la geometría del espacio-tiempo no esplana, es decir, está caracterizada por un tensor de curvatura que no es idénticamente nulo en todos los puntos de lavariedad. Este tensor de curvatura puede ser relacionado con tensor de energía-impulso que representa el contenidomaterial del modelo de universo que se esté analizando. Algunos ejemplos de tensores métricos no euclídeosprocedentes de la teoría relatividad general que se usan como modelos de universo son:• Métrica de Schwarzschild, que representa la geometría del espacio-tiempo alrededor de un cuerpo de esférico
aislado y estático (que no gira alrededor de sí mismo).• Métrica de Friedman-Lemaître-Robertson-Walker, que se cree da una buena aproximación de la estructura del
universo en expansión a grandes escalas.

Tensor métrico 194
Por ejemplo a grandes rasgos la métrica solar lejos de los planetas, satélites y otras concentraciones de materia puedeconsiderarse como un ejemplo bastante aproximado de métrica de Schwarzschild, siendo sus componentes (en lascoordenadas cuasi-esféricas de Schwarzschild centradas en el sol: ):
Obsérvese la submatriz de 3x3 que se refiere a las coordenadas espaciales es similar a una métrica esférica difiriendosólo en el término . En coordenadas esféricas y la métrica resulta plana y por tanto representa unespacio euclídeo, sin embargo, en la métrica de Schwarzschild los términos caracterizan la curvatura delespacio-tiempo por culpa del campo gravitatorio del sol.Por otro lado, la métrica de Friedman-Lemaître-Robertson-Walker se considera que podría ser un modelo adecuadodel universo a escalas bastante más grandes que la de una galaxia. En el sistema comóvil pseudo-esférico
esta métrica resulta ser:
Para resulta un universo abierto que se expande sin límite, mientras que para la métrica ante anteriordescribe un universo cerrado y finito que tras expandirse hasta un máximo recolapsa sobre sí mismo dando lugar albig crunch.
Geometría de RiemannEn geometría diferencial, la geometría de Riemann es el estudio de las variedades diferenciales con métricas deRiemann; es decir de una aplicación que a cada punto de la variedad, le asigna una forma cuadrática definida positivaen su espacio tangente, aplicación que varía suavemente de un punto a otro. Esto da ideas locales de (entre otrasmagnitudes) ángulo, longitud de curvas, y volumen. A partir de éstas, pueden obtenerse otras magnitudes porintegración de las magnitudes locales.Fue propuesta por primera vez de forma general por Bernhard Riemann en el siglo XIX. Como casos especialesparticulares aparecen los dos tipos convencionales (geometría elíptica y geometría hiperbólica) de geometríaNo-Euclidiana, así como la geometría euclidiana misma. Todas estas geometrías se tratan sobre la misma base, aligual que una amplia gama de las geometrías con propiedades métricas que varían de punto a punto.Cualquier variedad diferenciable admite una métrica de Riemann y esta estructura adicional ayuda a menudo asolucionar problemas de topología diferencial. También sirve como un nivel de entrada para la estructura máscomplicada de las variedades pseudo-Riemann, las cuales (en el caso particular de tener dimensión 4) son los objetosprincipales de la teoría de la relatividad general.No hay introducción fácil a la geometría de Riemann. Los artículos siguientes pueden servir como introducción:1.1. tensor métrico2.2. variedad de Riemann3.3. conexión de Levi-Civita4.4. curvatura5. Tensor de curvatura.
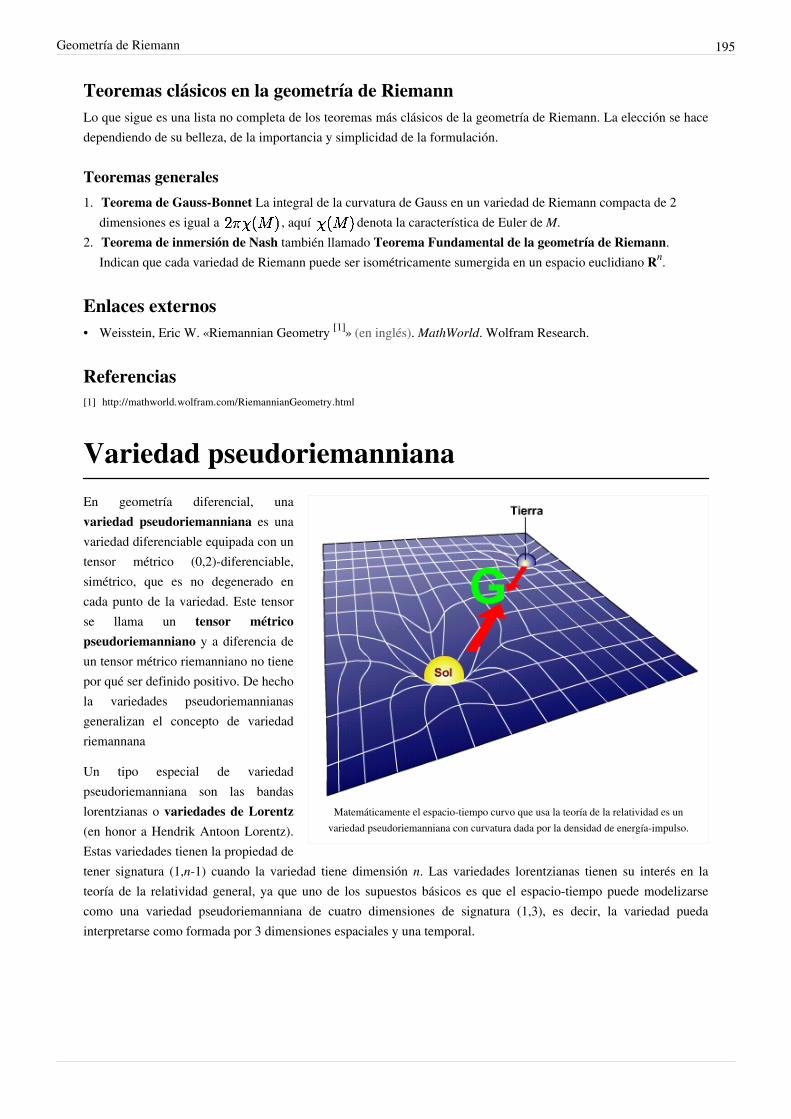
Geometría de Riemann 195
Teoremas clásicos en la geometría de RiemannLo que sigue es una lista no completa de los teoremas más clásicos de la geometría de Riemann. La elección se hacedependiendo de su belleza, de la importancia y simplicidad de la formulación.
Teoremas generales1. Teorema de Gauss-Bonnet La integral de la curvatura de Gauss en un variedad de Riemann compacta de 2
dimensiones es igual a , aquí denota la característica de Euler de M.2. Teorema de inmersión de Nash también llamado Teorema Fundamental de la geometría de Riemann.
Indican que cada variedad de Riemann puede ser isométricamente sumergida en un espacio euclidiano Rn.
Enlaces externos• Weisstein, Eric W. «Riemannian Geometry [1]» (en inglés). MathWorld. Wolfram Research.
Referencias[1] http:/ / mathworld. wolfram. com/ RiemannianGeometry. html
Variedad pseudoriemanniana
Matemáticamente el espacio-tiempo curvo que usa la teoría de la relatividad es unvariedad pseudoriemanniana con curvatura dada por la densidad de energía-impulso.
En geometría diferencial, unavariedad pseudoriemanniana es unavariedad diferenciable equipada con untensor métrico (0,2)-diferenciable,simétrico, que es no degenerado encada punto de la variedad. Este tensorse llama un tensor métricopseudoriemanniano y a diferencia deun tensor métrico riemanniano no tienepor qué ser definido positivo. De hechola variedades pseudoriemannianasgeneralizan el concepto de variedadriemannana
Un tipo especial de variedadpseudoriemanniana son las bandaslorentzianas o variedades de Lorentz(en honor a Hendrik Antoon Lorentz).Estas variedades tienen la propiedad detener signatura (1,n-1) cuando la variedad tiene dimensión n. Las variedades lorentzianas tienen su interés en lateoría de la relatividad general, ya que uno de los supuestos básicos es que el espacio-tiempo puede modelizarsecomo una variedad pseudoriemanniana de cuatro dimensiones de signatura (1,3), es decir, la variedad puedainterpretarse como formada por 3 dimensiones espaciales y una temporal.

Variedad pseudoriemanniana 196
Variedades riemannianas y pseudoriemannianasLa diferencia clave entre una métrica Riemanniana y una métrica pseudoriemanniana es que una métricapseudoriemanniana no necesita ser positiva-definida, simplemente no degenerada. Puesto que cada formapositivo-definida es también no degenerada una métrica Riemanniana es un caso especial de pseudoriemanniano. Asílas variedades pseudoriemannianas se pueden considerar generalizaciones de las variedades de Riemann.Cada forma no degenerada, simétrica bilineal tiene una signatura fija (p, q). Aquí p y q denotan el número de losvalores propios positivos y negativos de la forma. La signatura de una variedad pseudoriemanniana es justa lasignatura del métrico (uno debe insistir que la signatura está igual en cada componente conexo). Observe que p + q =n es la dimensión de la variedad. Los variedades de Riemann son simplemente esos con la signatura (n, 0).El espacio modelo para una variedad pseudoriemanniana de signatura (p, q) es Rp, q con la métrica
(1) ,Algunos teoremas básicos de la geometría de Riemann se pueden generalizar al caso pseudoriemanniano. Enparticular, el teorema fundamental de la geometría de Riemann es verdad en las variedades pseudoriemannianastambién. Esto permite que se hable de la conexión de Levi-Civita en una variedad pseudoriemanniana junto con eltensor asociado de curvatura. Por otra parte, hay muchos teoremas en la geometría de Riemann que no se sostienenen el caso generalizado. Por ejemplo, no es verdad que cada variedad diferenciable admite un métricapseudoriemanniana de una signatura dada; hay ciertas obstrucciones topológicas.
Variedades de LorentzLas métricas pseudoriemannianas de signatura (p, 1) (o a veces (1, q), considerando la convención de signo) sellaman métricas de Lorentz. Un variedad equipada de una métrica de Lorentz naturalmente se llama una variedadde Lorentz. Después de las variedades de Riemann, las variedades de Lorentz, forman la subclase más importante delas variedades pseudoriemannianas. Son importantes debido a sus usos físicos para la teoría de la relatividad general.Una asunción principal de la relatividad general es que el espacio-tiempo se puede modelar como variedad deLorentz de la signatura (3, 1).Así pues, el espacio euclídeo Rn se puede pensar como la variedad modelo de Riemann, el espacio de MinkowskiRp,1 con la métrica chata de Minkowski es la variedad modelo de Lorentz.Una diferencia importante entre las variedades de Riemann y las variedades de Lorentz, es que en las primeras todacurva geodésica es un mínimo local de longitud, mientras que en una variedad lorentziana es un extremo local o unacurva de "longitud cero" (un mínimo en el caso de geodésicas espaciales, un máximo en el caso de geodésicastemporales y una curva de "longitud" cero a lo largo de una geodésica lumínica).
GeodésicasUna propiedad importante de las variedades pseudoriemannianas es que en ellas las curvas geodésicas o curvas demínima curvatura no tienen por qué ser localmente curvas de mínima longitud, sino simplemente extremales de lasecuaciones de Euler-Lagrange, es decir, curvas que pueden ser localmente de máxima o de mínima "longitud" (dehecho, el nombre longitud puede ser incorrecto ya que nos referimos a una magnitud que generaliza la longitud deuna curva y puede ser positiva, negativa o cero).

Variedad pseudoriemanniana 197
Bibliografía• O'Neill, B. Semi-Riemannian Geometry: With Applications to Relativity. Academic Press, 1983.ISBN 0-12-526740-1
Variedad de Riemann
Ejemplo de variedad de Riemann bidimensional con unsistema de coordenadas ortogonales definido sobre ella, y
varias subvariedades curvas de la misma.
En la geometría de Riemann, una variedad de Riemann esuna variedad diferenciable real en la que cada espaciotangente se equipa con un producto interior de manera quevaríe suavemente punto a punto. Esto permite que se definanvarias nociones métricas como longitud de curvas, ángulos,áreas (o volúmenes), curvatura, gradiente de funciones ydivergencia de campos vectoriales.
Introducción
Una variedad de Riemann es una generalización del conceptométrico, diferencial y topológico del espacio euclidiano aobjetos geométricos que localmente tienen la mismaestructura que el espacio euclidiano pero globalmente puedenrepresentar forma "curva". De hecho, los ejemplos mássencillos de variedades de Riemann son precisamentesuperficies curvas de y subconjuntos abiertos de .
La estructura matemática de la geometría riemanniana permite extender a subconjuntos curvos o hipersuperficies delespacio euclidiano, las nociones métricas de longitud de una curva, área de una superficie, (hiper)volumen o ánguloentre dos curvas. Esto se realiza definiendo en cada punto un objeto matemático llamado tensor métrico que permiteespecificar un procedimiento para medir distancias, y por tanto definir cualquier otro concepto métrico basado endistancias y sus variaciones.
Desde el punto de vista matemático una variedad de Riemann es una tripleta del tipo:
Donde:
es una variedad diferenciable en la que se ha especificado el conjunto de cartas locales.es una aplicación bilineal definida positiva desde el espacio tangente a la variedad:
En particular, la métrica g permite definir en cada espacio tangente una norma ||.|| mediante

Variedad de Riemann 198
Variedades riemannianas como subvariedadesUna forma sencilla de construir variedades riemanninas es buscar subconjuntos "suaves" del espacio euclidiano. Dehecho, cada subvariedad diferenciable de Rn tiene una métrica de Riemann inducida: el producto interior en cadafibra tangente es la restricción del producto interno en Rn.De hecho, como se sigue del teorema de inmersión de Nash, todos las variedades de Riemann se pueden considerarsubvariedades diferenciables de , para algún D. En particular se puede definir una variedad de Riemann comoun espacio métrico que es isométrico a una subvariedad diferenciable de RD con la métrica intrínseca inducida. Estadefinición puede no ser teóricamente suficientemente flexible, pero es muy útil al construir las primeras intuicionesgeométricas en la geometría de Riemann.En general una subvariedad de , dimensión m, vendrá definida localmente por un conjunto de aplicacionesdiferenciables del tipo:
Por lo que matricialmente se tendrá en cada punto de coordenadas asociadas ui que el tensor métrico puedeexpresarse en coordenadas locales en términos de la matriz jacobiana de f:
En este caso las harían el papel de coordenadas locales sobre la subvariedad.
Variedades riemannianas como secciones diferenciablesUna variedad de Riemann se define generalmente como variedad diferenciable con una sección diferenciable deformas cuadráticas positivo-definidas en el fibrado tangente. Entonces se tiene trabajo en demostrar que puede serconvertido en un espacio métrico:Si γ: [a, b] → M es una curva continuamente diferenciable en la variedad de Riemann M, entonces se define sulongitud L(γ) como
(nótese que el γ'(t) es un elemento del espacio tangente a M en el punto γ(t); ||.||denota la norma resultante delproducto interior dado en ese espacio tangente.)Con esta definición de longitud, cada variedad de Riemann conexa M se convierte en un espacio métrico (e inclusoun espacio métrico con longitud) de un modo natural: la distancia d(x, y) entre los puntos x y y en M se define como
d (x, y) = inf L(γ): γ es una curva continuamente diferenciable que conecta a x y y .
Conceptos métricos
Líneas geodésicasAunque las variedades de Riemann son generalmente "curvas", no obstante, podemos encontrar que dados dospuntos diferentes y suficientemente cercanos existe una curva de longitud mínima (aunque esta no tiene porqué serúnica). Estas líneas de mínima longitud se llaman líneas geodésicas y son una generalización del concepto "línearecta" o "línea de mínima longitud". Éstas son las curvas que localmente conectan sus puntos a lo largo de lastrayectorias más cortas.
Así dada una curva contenida en una variedad riemanniana M, definimos la longitud de dichacurva L(γ) mediante el vector tangente a la misma y las componentes gij del tensor métrico g del siguiente modo:

Variedad de Riemann 199
Donde xi(t) es la expresión paramétrica de los puntos de la curva parametrizada mediante el parámetro t. Usando lossímbolos de Christoffel asociadas a la conexión sin torsión, la curva geodésica de mínima longitud que pasan por unpunto x0 y tiene el vector tangente v satisface la siguiente ecuación:
Puede probarse que la ecuación anterior puede obtenerse por métodos variacionales, concretamente podemos de lasecuaciones de Euler-Lagrange para un lagrangiano construido a partir de la forma cuadrática asociada al tensormétrico.
Longitud, ángulo y volumenEn una variedad riemanniana la existencia de un tensor métrico permite extender las nociones euclideas de longitud,ángulo entre dos curvas en un punto (o dos vectores del espacio tangente de un punto) o el volumen de una región dedicha variedad.• La longitud de un segmento de una curva dada parametrizada por , desde hasta , se define como:
• El ángulo entre dos vectores U y V (o entre dos curvas cuyos vectores tangentes sean U y V ) se define como:
• El n-volumen de una región R de una variedad de dimensión n viene dado por la integral extendida a dicha regiónde la n-forma de volumen:
Además de esto se pueden definir medidas de dimensionalidad 1< d < n para regiones de subvariedades contenidasen la variedad original, lo cual permite definir d-áreas ciertos subconjuntos de la variedad.
Producto interiorEl producto interior en Rn (el producto escalar euclidiano familiar) permite que se defina longitudes de vectores yángulos entre vectores. Por ejemplo, si a y b son vectores en Rn, entonces a² es la longitud al cuadrado del vector, ya * b determina el coseno del ángulo entre ellos (a * b = ||a|| ||b|| cos θ). El producto interior es un concepto delálgebra lineal que se puede definir para cualquier espacio vectorial. Desde el fibrado tangente de una variedaddiferenciable (o de hecho, cualquier fibrado vectorial sobre una variedad) es, considerado punto a punto, un espaciovectorial, puede llevar también un producto interior. Si el producto interior en el espacio tangente de una variedad sedefine suavemente, entonces los conceptos que eran solamente punto a punto definido en cada espacio tangente sepueden integrar, para rendir nociones análogas en regiones finitas de la variedad. En este contexto, el espaciotangente se puede pensar como traslación infinitesimal en la variedad. Así, el producto interno en el espacio tangenteda la longitud de una traslación infinitesimal. La integral de esta longitud da la longitud de una curva en la variedad.Para pasar de un concepto algebraico lineal a uno geométrico diferencial, el requisito de suavidad es importante, enmuchos casos.
Variedad de Riemann 200
CurvaturaEn una variedad riemanniana las geodésicas alrededor de un punto exhiben comportamientos atípicos respecto a lageometría euclidiana. Por ejemplo en un espacio euclidiano pueden darse líneas rectas paralelas cuya distancia semantiene constante, sin embargo, en una variedad riemanniana los haces de geodésicas tienden a divergir (curvaturanegativa) o a convergir (curvatura positiva), según sea la curvatura seccional de dicha variedad. Todas las curvaturaspueden ser representadas adecuadamente por el tensor de curvatura Riemann que es definible a partir de derivadas deprimer y segundor orden del tensor métrico. El tensor de curvatura en términos de los símbolos de Christoffel yusando el convenio de sumación de Einstein viene dado por:
Una relación interesante que aclara el significado del tensor de curvatura es que si se consideran coordenadasnormales centradas en un punto p en un entorno de dicho punto la métrica de toda variedad riemanninapuede escribirse como:
Puede verse que si el tensor de Riemann se anula idénticamente entonces localmente la métrica se aproxima a lamétrica euclidiana y la geometría localmente es euclidiana. En caso del que el tensor no sea nula, sus componentesdan una idea de cuanto se alejan la geometría de la variedad riemanniana de la geometría de un espacio euclidiano dela misma dimensión.
Generalizaciones de las variedades de Riemann• Variedad pseudoriemanniana, en las que se retira el requisito de que el tensor métrico dé lugar a una forma
cuadrática definida positiva sobre cada punto en el espacio tangente, y se sustituye por el requisito más débil deque el tensor métrico sea sencillamente no degenerado. Toda variedad riemanniana es también una variedadpseudoriemanniana.
• Variedad de Finsler, en la que se elimina el requisito de existencia de un tensor métrico definido positivo, y sesustituye esa condición por el requisito más débil la existencia de una norma sobre el espacio vectorial tangente acada punto. Toda variedad riemanniana es por tanto una variedad de Finsler.
Referencias
Bibliografía• Robert M. Wald, General Relativity, Chicago University Press, ISBN 0-226-87033-2.• Lee, J.M. Riemannian manifolds: an introduction to curvature. GTM 176. ISBN 0-387-98271-X

Álgebra de Lie 201
Álgebra de LieEn matemática, un álgebra de Lie es la estructura algebraica definida sobre un espacio vectorial, asociadausualmente a los grupos de Lie y usadas en el estudio geométrico de esos los propios grupos y de otras variedadesdiferenciables. El término "álgebra de Lie" (referido a Sophus Lie) fue creado por Hermann Weyl en la década de1930, para lo que se denominaba "grupo infinitesimal".Si un grupo de Lie puede interpretarse en física como un grupo de transformaciones sobre una variedad diferenciableel álgebra de Lie físicamente puede concebirse como un conjunto de transformaciones infinitesimales.
DefiniciónUn álgebra de Lie A es un espacio vectorial sobre un cierto cuerpo F junto con una operación binaria [·, ·] : A × A-> A, llamada corchete de Lie, que satisface las propiedades siguientes:• es bilineal, es decir, [a x + b y, z] = a [x, z] + b [y, z] y [z, a x + b y] = a [z, x] + b [z, y] para todo a, b en F y todo
x, y, z en A.• satisface la identidad de Jacobi, es decir, [[x, y], z] + [[z, x], y] + [[y, z], x] = 0 para todo x, y, z en A.• [x, x] = 0 para todo x en A.Observe que la primera propiedad y la tercera juntas implican [x, y] = − [y, x] para todo x, y en A ("anti-simetría") siel cuerpo F es de característica diferente de dos. Observe también que la multiplicación representada por el corchetede Lie no es, en general, asociativa, es decir, [[x, y], z] no necesariamente es igual a [x, [y, z]].
Ejemplos• Cada espacio vectorial se convierte en un álgebra de Lie abeliana trivial si definimos el corchete de Lie como
idénticamente cero.• El espacio euclídeo se convierte en un álgebra de Lie con el corchete de Lie dado por el producto vectorial.• Si se da un álgebra asociativa A con la multiplicación * , se puede dar un álgebra de Lie definiendo [x, y] =
x * y − y * x. esta expresión se llama el conmutador de x e y.• Inversamente, puede ser demostrado que cada álgebra de Lie se puede sumergir en otra que surja de un álgebra
asociativa de esa manera.• Otro ejemplo importante viene de la topología diferencial: los campos vectoriales en una variedad diferenciable
forman un álgebra de Lie de dimensión infinita. Estos campos vectoriales actúan como operadores diferencialessobre las funciones diferenciables sobre la variedad. Dados dos campos vectoriales X e Y, el corchete de Lie se define como:
y puede comprobarse que este operador corresponde a un campo vectorial. Las generalizaciones adecuadas de lateoría de variedades al caso de dimensión infinita muestra que este álgebra de Lie es ala asociada (ver siguientepunto) al grupo de Lie de los difeomorfismos de la variedad.• En el caso de una variedad que sea un grupo de Lie a su vez, un subespacio de los campos vectoriales queda
inalterado por las transformaciones dadas por el propio grupo, en el sentido de que en cada punto del mismo, elcampo no es más que:
Este subespacio es de dimensión finita (e igual a la del grupo), dado que se corresponde con el espacio tangente en laidentidad. Además hereda la estructura de álgebra de Lie definida en el punto anterior, y se le denomina el álgebrade Lie asociada al grupo .

Álgebra de Lie 202
• Como ejemplo concreto, consideremos el grupo de Lie SL(n, R) de todas las matrices con valores realesy determinante 1. El espacio tangente en la matriz identidad se puede identificar con el espacio de todas lasmatrices reales con traza 0 y la estructura de álgebra de Lie que viene del grupo de Lie coincide con elque surge del conmutador de la multiplicación de matrices.
Homomorfismos, subálgebras e idealesUn homomorfismo φ : A -> B entre las álgebra de Lie A y B sobre el mismo cuerpo de base F es una funciónF-lineal tal que [φ(x),φ(y)] =φ([x, y]) para todo x y y en A. La composición de tales homomorfismos es otra vez unhomomorfismo, y las álgebras de Lie sobre el cuerpo F, junto con estos morfismos, forman una categoría. Si talhomomorfismo es biyectivo, se llama un isomorfismo, y las dos álgebras de Lie A y B se llaman isomorfas. Paratodos los efectos prácticos, las álgebras de Lie isomorfas son idénticas.Una subalgebra del álgebra de Lie A es un subespacio vectorial B de A tal que [x, y] ∈ B para todo x, y ∈ B. i.e. [B,B] ⊆ B. La subalgebra es entonces un álgebra de Lie.Un ideal del álgebra de Lie A es un subespacio vectorial I de A tales que [a, y ] ∈ I para toda a ∈ A y y ∈ I. i.e. [A,I] ⊆ I. Todos los ideales son subalgebras. Si I es un ideal de A, entonces el espacio cociente A/I se convierte en unaálgebra de Lie definiendo [x + I, y + I] = [x, y] + I para todo x, y ∈ A. Los ideales son precisamente los núcleos dehomomorfismos, y el teorema fundamental de homomorfismos es válido para las álgebras de Lie.
Clasificación de las álgebras de LieLas álgebras de Lie reales y complejas se pueden clasificar hasta un cierto grado, y esta clasificación es un pasoimportante hacia la clasificación de los grupos de Lie. Cada álgebra de Lie real o compleja finito-dimensional sepresenta como el álgebra de Lie de un único grupo de Lie simplemente conexo real o complejo (teorema de Ado),pero puede haber más de un grupo, aún más de un grupo conexo, dando lugar a la misma álgebra. Por ejemplo, losgrupos SO(3) (matrices ortogonales 3×3 de determinante 1) y SU(2) (matrices unitarias 2×2 de determinante 1),ambos dan lugar a la misma álgebra de Lie, a saber R³ con el producto vectorial. Un álgebra de Lie es abeliana si elcorchete de Lie se anula, es decir [x, y] = 0 para todo x e y. Más generalmente, un álgebra de Lie A es nilpotente si laserie central descendente
A ⊇ [A, A] ⊇ [[A, A]], A] ⊇ [[[A, A]], A], A] ⊇...acaba haciéndose cero. Por el teorema de Engel, un álgebra de Lie es nilpotente si y solo si para cada x en A, lafunción ad(x): A -> A definida por
ad(x)(y) = [x, y]es nilpotente. Más generalmente aún, un álgebra de Lie A es soluble si la serie derivada
A ⊇ [A, A] ⊇ [[A, A]], [A, A]] ⊇ [[[A, A]], [A, A]],[[A, A]], [A, A]]] ⊇ ...acaba haciéndose cero. Una subálgebra soluble maximal se llama una subálgebra de Borel.Un álgebra de Lie A se llama semisimple si el único ideal soluble de A es trivial. Equivalente, A es semisimple si ysolamente si la forma de Killing K(x, y) = tr(ad(x)ad(y)) es no-degenerada; aquí tr denota el operador de traza.Cuando el cuerpo F es de característica cero, A es semi-simple si y solamente si cada representación es totalmentereducible, esto es, que para cada subespacio invariante de la representación hay un complemento invariante (teoremade Weyl). Un álgebra de Lie es simple si no tiene ningún ideal no trivial. En particular, un álgebra de Lie simple essemi-simple, y más generalmente, las álgebras de Lie semi-simples son suma directa de simples. Las álgebras de Liecomplejas semi-simples se clasifican a través de sus sistemas de raíz.
Álgebra de Lie 203
Enlaces externos• web en español con explicaciones muy detalladas de las álgebras de Lie [1]
Temas relacionados•• super álgebra de Lie•• Algebroide de Lie•• Álgebra de Virasoro•• E8 (matemáticas)
Referencias[1] http:/ / jacobi. fis. ucm. es/ marodriguez/ notas_clase/ Lie. pdf
Teorema fundamentalEn matemáticas, hay numerosos teoremas que reciben el nombre de "teorema fundamental" de distintos campos.Los nombres son generalmente fieles a la tradición, de forma que, por ejemplo, el teorema fundamental de laaritmética se refiere a lo que actualmente llamamos teoría de números. Estos teoremas son fundamentales porqueson enunciados básicos a partir de los cuales se siguen teoremas más complejos sin volver atrás a los axiomas. Heaquí una lista de teoremas llamados fundamentales:•• teorema fundamental del álgebra•• teorema fundamental del álgebra lineal•• teorema fundamental del análisis vectorial•• teorema fundamental de la aritmética•• teorema fundamental del cálculo•• teorema fundamental de las curvas•• teorema fundamental de la geometría proyectiva•• teorema fundamental de la geometría riemanniana•• teorema fundamental de los grupos abelianos finitamente generados•• teorema fundamental de los grupos cíclicos•• teorema fundamental de homomorfismos•• teorema fundamental de las superficies•• teorema fundamental de la teoría de Galois__DISAMBIG__

Teorema fundamental de la aritmética 204
Teorema fundamental de la aritméticaEn matemática, y particularmente en la teoría de números, el teorema fundamental de la Aritmética o teorema defactorización única afirma que todo entero positivo se puede representar de forma única como producto de factoresprimos. Por ejemplo,
No existe ninguna otra factorización de 6936 y 1200 en números primos. Como la multiplicación es conmutativa, elorden de los factores es irrelevante; por esta razón, usualmente se enuncia el teorema como factorización única salvoen el orden de los factores.Por definición, un producto vacío tiene por resultado 1, con lo cual el teorema vale también para 1 si se toma comoel producto de cero factores.
Aplicaciones
Representación canónica de un entero positivoTodo entero positivo n > 1 puede ser representado exactamente de una única manera como un producto depotencias de números primos:
donde p1 < p2 < ... < pk son primos y αi son enteros positivos.Esta representación se llama representación canónica de n, o forma estándar[1] de n.
Por ejemplo 999 = 33×37, 1000 = 23×53, 1001 = 7×11×13Nótese que los factores p0 = 1 pueden ser insertados sin cambiar el valor de n (p.e. 1000 = 23×30×53). En efecto,cualquier número positivo puede ser representado únicamente como un producto infinito tomado sobre todo elconjunto de los números primos,
donde un número finito de αp son enteros positivos, y el resto son cero. Permitiendo exponentes negativos seproporciona una forma canónica para los números racionales.
ImportanciaEl teorema establece la importancia de los números primos. Éstos son los «ladrillos básicos» con los que se«construyen» los enteros positivos, en el sentido de que todo entero positivo puede construirse como producto denúmeros primos de una única manera.Conocer la factorización en primos de un número permite encontrar todos sus divisores, primos o compuestos. Porejemplo, la factorización anteriormente dada de 6936 muestra que cualquier divisor positivo 6936 debe tener laforma: , donde 0 ≤ a ≤ 3 (4 valores posibles), 0 ≤ b ≤ 1 (2 valores posibles), y 0 ≤ c ≤ 2 (3 valoresposibles). Multiplicando el número de opciones independientes se obtiene un total de divisorespositivosUna vez que se conoce la factorización en primos de dos números, se pueden hallar fácilmente su máximo común divisor y mínimo común múltiplo. Por ejemplo, de las factorizaciones anteriores de 6936 y 1200 se puede deducir que su máximo común divisor es 2³ · 3 = 24. Sin embargo, si no se conoce la factorización en primos, usar el
Teorema fundamental de la aritmética 205
algoritmo de Euclides en general requiere muchos menos cálculos que factorizar los dos números.El teorema fundamental implica que las funciones aritméticas aditivas y multiplicativas están completamentedeterminadas por sus valores en las potencias de los números primos.Cualquier número entero n mayor que 1 puede escribirse de manera única, salvo el orden, como un producto denúmeros primos.
DemostraciónEl teorema fue prácticamente demostrado por primera vez por Euclides, aunque la primera demostración completaapareció en las Disquisitiones Arithmeticae de Carl Friedrich Gauss.Aunque a primera vista el teorema parezca «obvio», no vale en sistemas numéricos más generales, entre estosmuchos anillos de enteros algebraicos. Ernst Kummer fue el primero en notar esto en 1843, en su trabajo sobre elúltimo teorema de Fermat. El reconocimiento de este fallo es uno de los primeros avances de la teoría de númerosalgebraicos.
Demostración de EuclidesLa demostración se hace en dos pasos. En el primero se demuestra que todo número es un producto de primos(incluido el producto vacío). En el segundo se demuestra que cualesquier dos representaciones son iguales.
Descomposición en primos
Supóngase que existe algún entero positivo que no puede representarse como producto de primos. Entonces debehaber un mínimo número n con esa propiedad. Este número n no puede ser 1, por la convención anterior. Tampocopuede ser un primo, porque todo primo es el producto de un único número primo: él mismo.Así pues, n = ab, donde a y b son enteros positivos menores que n. Como n es el mínimo entero positivo para el quefalla el teorema, tanto a como b pueden escribirse como producto de primos. Pero entonces n = ab también puedeescribirse como producto de primos, lo que es contradictorio.
Unicidad
La demostración de la unicidad se apoya en el siguiente hecho: si un número primo p divide a un producto ab,entonces divide a a o divide a b (lema de Euclides). Para demostrar este lema, si se supone que p no divide a a,entonces p y a son primos entre sí y por la identidad de Bézout existen x e y enteros tales que px + ay = 1.Multiplicando por b se obtiene pbx + aby = b, y puesto que los dos sumandos del lado izquierdo son divisibles por p,el término de la derecha también es divisible por p.Dados dos productos de primos que tengan igual resultado, tómese un primo p del primer producto. Divide al primerproducto, y por lo tanto también al segundo. Por el hecho anterior, p debe dividir al menos a un factor del segundoproducto; pero los factores son todos primos, así que p debe ser igual a uno de los factores del segundo producto. Sepuede entonces cancelar a p de ambos productos. Siguiendo de esta forma se cancelarán todos los factores de ambosproductos, con lo cual éstos deben coincidir exactamente.
Demostración por descenso infinitoOtra prueba de la unicidad de las factorizaciones en primos de un entero dado utiliza el método del descenso infinito.Supóngase que cierto número entero se puede escribir como producto de factores primos de (al menos) dos maneras distintas. Entonces, debe existir un mínimo entero s con esa propiedad. Sean p1·...·pm y q1·...·qn dos factorizaciones distintas de s. Ningún pi (con 1 ≤ i ≤ m) puede ser igual a algún qj (con 1 ≤ j ≤ n), pues de lo contrario habría un número menor que s que se podría factorizar de dos maneras (obtenido al quitar factores comunes a ambos productos) contradiciendo la suposición anterior. Se puede entonces suponer sin pérdida de generalidad que p1 es un

Teorema fundamental de la aritmética 206
factor primo menor que todos los qj (con 1 ≤ j ≤ n). Considérese en particular q1. Entonces existen enteros d y r talesque
y 0 < r < p1 < q1 (r no puede ser 0, puesto que en tal caso q1 sería un múltiplo de p1 y por lo tanto compuesto). Almultiplicar ambos lados por s / q1, resulta
El segundo término de la última expresión debe ser igual a un entero (pues lo son también los otros términos), al quese llamará k; esto es,
de donde se obtiene,
El valor de los dos lados de esta ecuación es obviamente menor que s, pero sigue siendo lo bastante grande comopara ser factorizable. Como r es menor que p1, las dos factorizaciones obtenidas en ambos lados después de haberescrito k y r como producto de primos deben ser diferentes. Esto contradice la suposición de que s es el entero máspequeño que se puede factorizar en más de una forma. Por tanto, la suposición inicial debe ser falsa.
Demostración por álgebra abstractaSea n un entero. Zn es un grupo finito, por lo que tiene una serie de composición. Por definición, los factores en unaserie de composición son simples; por lo tanto, en la serie de Zn éstos deben ser de la forma Zp para algún primo p.Como el orden de Zn es el producto de los órdenes de los factores de su serie de composición, esto da unafactorización de n en números primos. Pero el teorema de Jordan-Hölder afirma que una serie de composición esúnica, y por lo tanto la factorización de n debe ser única.
Referencias[1] Hardy & Wright § 1.2
Enlaces externos• Construcción de una tabla de factores primos para los números del 1 al 360 en lenguaje Logo (http:/ / neoparaiso.
com/ logo/ factores-primos-divisores. html)
Teorema fundamental de la teoría de Galois 207
Teorema fundamental de la teoría de GaloisEn matemáticas, el teorema fundamental de la teoría de Galois es un resultado que describe la estructura deciertos tipos de extensiones de cuerpos.En su forma más básica el teorema dice que dada una extensión de cuerpos E/F que sea finita y Galois, existe unacorrespondencia uno a uno entre sus cuerpos intermedios (cuerpos K que satisfacen F K E; también llamadossubextensiones de E/F) y los subgrupos de su grupo de Galois.
Descripción explícita de la correspondenciaPara extensiones finitas, la correspondencia puede describirse explícitamente como sigue:• Para cada subgrupo H de Gal(E/F), el cuerpo correspondiente, denotado normalmente EH, es el conjunto de
aquellos elementos de E que son fijos para cada automorfismo en H.• Para cada cuerpo intermedio K de E/F, el subgrupo correspondiente es precisamente Aut(E/K), esto es, el
conjunto de aquellos automorfismos en Gal(E/F) que dejan fijo a cada elemento de K.Por ejemplo, el cuerpo más "grande" E se corresponde al subgrupo trivial de Gal(E/F), y el cuerpo base F secorresponde al grupo completo: Gal(E/F).
Propiedades de la correspondenciaLa correspondencia tiene las siguientes propiedades útiles:• Es revertible por inclusión. La inclusión de subgrupos H1 H2 se da si y sólo si se da también la inclusión en
cuerpos: EH1 EH2.• Los grados de las extensiones están relacionados con el orden de los grupos de manera consistente con la
propiedad anterior. Concretamente, si H es un subgrupo de Gal(E/F), entonces |H| = [E:EH] y [Gal(E/F):H] =[EH:F].
• El cuerpo EH es una extensión normal de F si y sólo si H es un subgrupo normal de Gal(E/F). En este caso, larestricción de los elementos de Gal(E/F) al EH induce un isomorfismo entre Gal(EH/F) y el grupo cocienteGal(E/F)/H.
AplicacionesEl teorema transforma el problema de clasificar los cuerpos intermedios de E/F en el problema menos difícil de listarlos subgrupos de cierto grupo finito.Por ejemplo, para demostrar que la ecuación general de quinto grado no es resoluble por radicales (ver teorema deAbel-Ruffini), se debe establecer el problema en términos de extensiones radicales (extensiones de la forma F(α)donde α es una n-sima raíz de algún elemento de F), y entonces usar el teorema fundamental para convertir estaafirmación en un problema sobre grupos que ya podamos atacar más directamente.Las teorías como Teoría de Kummer y la teoría de cuerpos de clases se derivan del teorema fundamental.
Caso infinitoExiste también una versión de este teorema fundamental de la teoría de Galois que se aplica a extensionesalgebraicas infinitas, que además son normales y separables. Se requiere para ello definir una cierta estructuratopológica, la Topología de Krull sobre el grupo de Galois; entonces sólo aquellos subgrupos que sean tambiéncerrados de la topología serán relevantes para la correspondencia del teorema.

Teorema fundamental de homomorfismos 208
Teorema fundamental de homomorfismosEn álgebra abstracta, para un número de estructuras algebraicas, el teorema fundamental de homomorfismosrelaciona la estructura de dos objetos entre los cuales se dé un homomorfismo, y del núcleo y de la imagen delhomomorfismo.En la teoría de grupos, el teorema se puede formular así:
Si es un homomorfismo de grupos y es un subgrupo normal de contenido en elnúcleo de , entonces existe un único homomorfismo tal que , en donde
es la proyección canónica. Así, tenemos el diagrama conmutativo siguiente
El homomorfismo está dado por
para todo de , y se dice que es inducido por . Nótese que si , entonces, por lo que , así que y el homomorfismo
está bien definido.El núcleo de este homomorfismo es , y es un epimorfismo si y sólo si lo es.Si es un homomorfismo, entonces es un epimorfismo, y puesto que esinyectivo cuando su núcleo es trivial, lo que sucede si y sólo si , tenemos unisomorfismo . Este caso particular del teorema fundamental de homomorfismos se conocecomo primer teorema de isomorfía.El teorema fundamental de homomorfismos también se cumple para los espacios vectoriales, anillos y módulostomando, respectivamente, ideales y submódulos en lugar de subgrupos normales.
Enlaces externosPuede verse una demostración de este teorema en el wikilibro de Álgebra, Subgrupos normales.
Bibliografía1. Hungerford, T. Algebra. (1974) Springer-Verlag, New York.
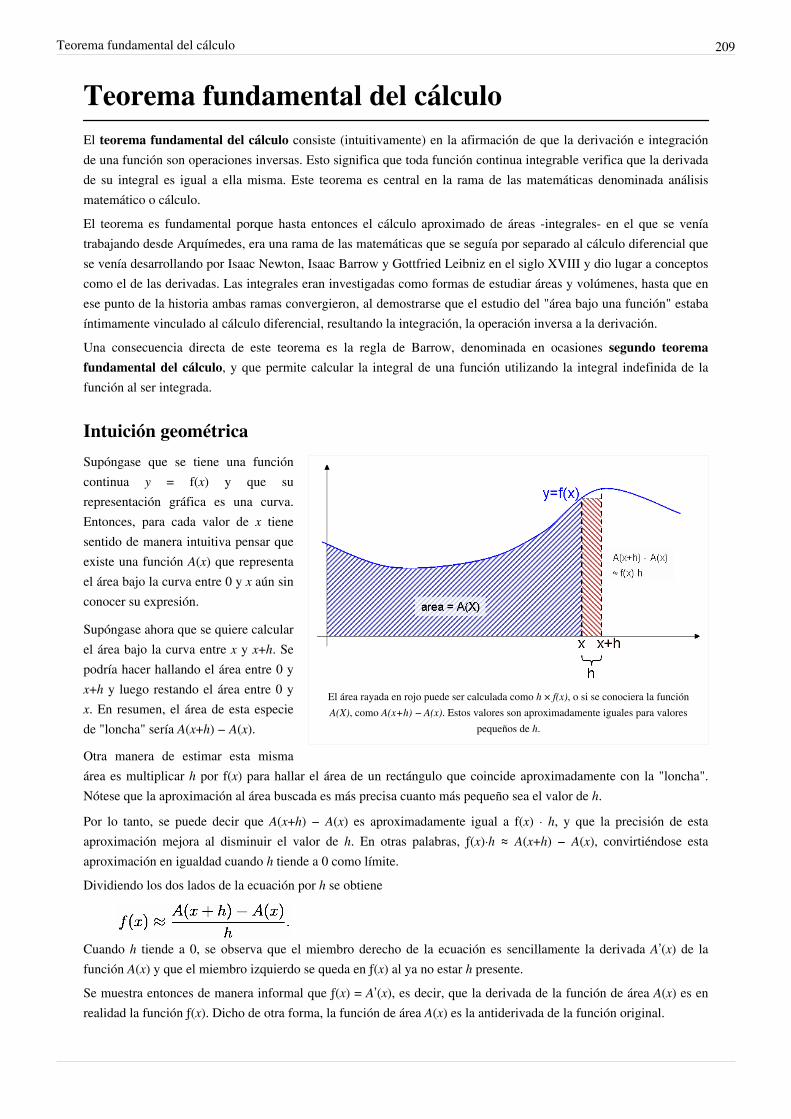
Teorema fundamental del cálculo 209
Teorema fundamental del cálculoEl teorema fundamental del cálculo consiste (intuitivamente) en la afirmación de que la derivación e integraciónde una función son operaciones inversas. Esto significa que toda función continua integrable verifica que la derivadade su integral es igual a ella misma. Este teorema es central en la rama de las matemáticas denominada análisismatemático o cálculo.El teorema es fundamental porque hasta entonces el cálculo aproximado de áreas -integrales- en el que se veníatrabajando desde Arquímedes, era una rama de las matemáticas que se seguía por separado al cálculo diferencial quese venía desarrollando por Isaac Newton, Isaac Barrow y Gottfried Leibniz en el siglo XVIII y dio lugar a conceptoscomo el de las derivadas. Las integrales eran investigadas como formas de estudiar áreas y volúmenes, hasta que enese punto de la historia ambas ramas convergieron, al demostrarse que el estudio del "área bajo una función" estabaíntimamente vinculado al cálculo diferencial, resultando la integración, la operación inversa a la derivación.Una consecuencia directa de este teorema es la regla de Barrow, denominada en ocasiones segundo teoremafundamental del cálculo, y que permite calcular la integral de una función utilizando la integral indefinida de lafunción al ser integrada.
Intuición geométrica
El área rayada en rojo puede ser calculada como h × f(x), o si se conociera la funciónA(X), como A(x+h) − A(x). Estos valores son aproximadamente iguales para valores
pequeños de h.
Supóngase que se tiene una funcióncontinua y = f(x) y que surepresentación gráfica es una curva.Entonces, para cada valor de x tienesentido de manera intuitiva pensar queexiste una función A(x) que representael área bajo la curva entre 0 y x aún sinconocer su expresión.
Supóngase ahora que se quiere calcularel área bajo la curva entre x y x+h. Sepodría hacer hallando el área entre 0 yx+h y luego restando el área entre 0 yx. En resumen, el área de esta especiede "loncha" sería A(x+h) − A(x).
Otra manera de estimar esta mismaárea es multiplicar h por f(x) para hallar el área de un rectángulo que coincide aproximadamente con la "loncha".Nótese que la aproximación al área buscada es más precisa cuanto más pequeño sea el valor de h.
Por lo tanto, se puede decir que A(x+h) − A(x) es aproximadamente igual a f(x) · h, y que la precisión de estaaproximación mejora al disminuir el valor de h. En otras palabras, ƒ(x)·h ≈ A(x+h) − A(x), convirtiéndose estaaproximación en igualdad cuando h tiende a 0 como límite.Dividiendo los dos lados de la ecuación por h se obtiene
Cuando h tiende a 0, se observa que el miembro derecho de la ecuación es sencillamente la derivada A’(x) de lafunción A(x) y que el miembro izquierdo se queda en ƒ(x) al ya no estar h presente.Se muestra entonces de manera informal que ƒ(x) = A’(x), es decir, que la derivada de la función de área A(x) es enrealidad la función ƒ(x). Dicho de otra forma, la función de área A(x) es la antiderivada de la función original.

Teorema fundamental del cálculo 210
Lo que se ha mostrado es que, intuitivamente, calcular la derivada de una función y "hallar el área" bajo su curva sonoperaciones "inversas", es decir el objetivo del teorema fundamental del cálculo integral.
Primer teorema fundamental del cálculo
Dada una función f integrable sobre el intervalo , definimos F sobre por .
Si f es continua en , entonces F es derivable en y F'(c) = f(c).Consecuencia directa del primer teorema fundamental del cálculo infinitesimal es:
Siendo f(t) una función integrable sobre el intervalo [a(x),b(x)] con a(x) y b(x) derivables.
Demostración
Lema
Sea integrable sobre y
Entonces
Demostración
Por definición se tiene que .
Sea h>0. Entonces .
Se define y como:
,
Aplicando el 'lema' se observa que
.
Por lo tanto,
Sea . Sean
,.
Aplicando el 'lema' se observa que
.
Como
,

Teorema fundamental del cálculo 211
entonces,
.Puesto que , se tiene que
.
Y como es continua en c se tiene que
,y esto lleva a que
.
Ejemplos
Segundo teorema fundamental del cálculoEl segundo teorema fundamental del cálculo integral (o regla de Newton-Leibniz, o también regla de Barrow,en honor al matemático inglés Isaac Barrow, profesor de Isaac Newton) es una propiedad de las funciones continuasque permite calcular fácilmente el valor de la integral definida a partir de cualquiera de las primitivas de la función.
EnunciadoDada una función f(x) continua en el intervalo [a,b] y sea F(x) cualquier función primitiva de f, es decir F '(x)= f(x). Entonces

Teorema fundamental del cálculo 212
DemostraciónSea
.
Tenemos por el primer teorema fundamental del cálculo que:
.Por lo tanto,
tal que .Observamos que
y de eso se sigue que ; por lo tanto,.
Y en particular si tenemos que:
Ejemplos
Como se puede integrar inmediatamente.
Referencias• APOSTOL, Cálculus (http:/ / books. google. es/ books?id=Z5-JhzoChqIC& lpg=PR3& dq=Apostol, Calculus,
Vol. 1:& hl=es& pg=PR3#v=onepage& q& f=false)• SPIVAK, Cálculo Infinitesimal (http:/ / books. google. es/ books?id=mjdXY8rshREC& lpg=PP1& dq=Spivak&
hl=es& pg=PP1#v=onepage& q=Spivak& f=false)
Enlaces externos• El descubrimiento del cálculo integral (http:/ / www. uam. es/ personal_pdi/ ciencias/ barcelo/ histmatem/ calculo/
calculo. html) – Universidad Autónoma de Madrid• Interpretación gráfica del Teorema Fundamental del Cálculo (http:/ / recursos. pnte. cfnavarra. es/ ~msadaall/
geogebra/ figuras/ d7teorema. html) – Manuel Sada Allo• Weisstein, Eric W. « Teorema fundamental del cálculo (http:/ / mathworld. wolfram. com/
FundamentalTheoremsofCalculus. html)» (en inglés). MathWorld. Wolfram Research.• Demostración Euclidiana del TFC (http:/ / mathdl. maa. org/ convergence/ 1/ ?pa=content& sa=viewDocument&
nodeId=388& bodyId=343) – James Gregory, en Convergence (http:/ / mathdl. maa. org/ convergence/ 1/ ) (eninglés)
• Isaac Barrow's proof of the Fundamental Theorem of Calculus (http:/ / www. maths. uwa. edu. au/ ~schultz/ 3M3/L18Barrow. html) (en inglés)

Teorema fundamental del álgebra 213
Teorema fundamental del álgebraEl teorema fundamental del álgebra establece que todo polinomio de una variable no constante con coeficientescomplejos tiene una raíz compleja, es decir, existe un número complejo que evaluado en el polinomio da cero. Esteincluye polinomios con coeficiente reales, ya que cualquier número real es un número complejo con parte imaginariaigual a cero.Aunque ésta en principio parece ser una declaración débil, implica todo polinomio de grado n de una variable noconstante con coeficientes complejos n tiene, contando con las multiplicidades, exactamente n raíces. Laequivalencia de estos dos enunciados se realiza mediante la división polinómica sucesiva por factores lineales.Hay muchas demostraciones de este importante resultado, que requieren bastantes conocimientos matemáticos paraformalizarlas. El nombre del teorema es considerado ahora un error por muchos matemáticos, puesto que es más unteorema del análisis matemático que del álgebra.
HistoriaPedro Rothe (Petrus Roth), en su libro Arithmetica Philosophica (publicado en 1608), escribió que una ecuaciónpolinómica de grado (con coeficientes reales) puede tener soluciones. Alberto Girardo, en su libro L'inventionnouvelle en l'Algebre (publicado en 1629), aseveró que una ecuación de grado tiene soluciones, pero nomenciona que dichas soluciones deban ser números reales. Más aún, él agrega que su aseveración es válida "salvoque la ecuación sea incompleta", con lo que quiere decir que ninguno de los coeficientes del polinomio sea igual acero. Sin embargo, cuando explica en detalle a qué se está refiriendo, se hace evidente que el autor piensa que laaseveración siempre es cierta; en particular, muestra que la ecuación
a pesar de ser incompleta, tiene las siguientes cuatro soluciones (la raíz 1 tiene multiplicidad 2):
Leibniz en 1702 y más tarde Nikolaus Bernoulli, conjeturaron lo contrario.Como se mencionará de nuevo más adelante, se sigue del teorema fundamental del álgebra que todo polinomio concoeficientes reales y de grado mayor que cero se puede escribir como un producto de polinomios con coeficientesreales del cual sus grados son 1 ó 2. De todas formas, en 1702 Leibniz dijo que ningún polinomio de tipo (con a real y distinto de 0) se puede escribir en tal manera. Luego, Nikolaus Bernoulli hizo la misma afirmaciónconcerniente al polinomio , pero recibió una carta de Euler en 1742 en el que le decíaque su polinomio pasaba a ser igual a:
con α igual a raíz cuadrada de 4 + 2√7. Igualmente mencionó que:
El primer intento que se hizo para demostrar el teorema lo hizo d'Alembert en 1746. Su demostración tenía un fallo,en tanto que asumía implícitamente como cierto un teorema (actualmente conocido como el teorema de Puiseux) queno sería demostrado hasta un siglo más tarde. Entre otros Euler (1749), de Foncenex (1759), Lagrange (1772) yLaplace (1795) intentaron demostrar este teorema.A finales del siglo XVIII, se presentaron dos nuevas pruebas, una por James Wood y otra por Gauss (1799), peroambas igualmente incorrectas. Finalmente, en 1806 Argand publicó una prueba correcta para el teorema, enunciandoel teorema fundamental del álgebra para polinomios con coeficientes complejos. Gauss produjo otro par dedemostraciones en 1816 y 1849, siendo esta última otra versión de su demostración original.

Teorema fundamental del álgebra 214
El primer libro de texto que contiene la demostración de este teorema fue escrito por Cauchy. Se trata de Coursed'anlyse de l'École Royale Polytechnique (1821). La prueba es la debida a Argand, pero sin embargo en el texto nose le da crédito.Ninguna de las pruebas mencionadas más arriba son constructivas. Es Weierstrass quien por primera vez, a mediadosdel siglo XIX, menciona el problema de encontrar una prueba constructiva del teorema fundamental del álgebra. En1891 publica una demostración de este tipo. En 1940 Hellmuth Knesser consigue otra prueba de este estilo, queluego sería simplificada por su hijo Marin Kneser en 1981.
Enunciado y equivalenciasEl teorema se enuncia comúnmente de la siguiente manera:
Todo polinomio en una variable de grado n ≥ 1 con coeficientes reales o complejos tiene por lo menos unaraíz (real o compleja).[1]
Es ampliamente conocido también el enunciado: Un polinomio en una variable, no constante y con coeficientescomplejos, tiene tantas raíces[2] como indica su grado, contando las raíces con sus multiplicidades. En otras palabras,dado un polinomio complejo p(z) de grado n ≥ 1, la ecuación p(z) = 0 tiene exactamente n soluciones complejas,contando multiplicidades.Otras formas equivalentes del teorema son:• El cuerpo de los complejos es cerrado para las operaciones algebraicas.• Todo polinomio complejo de grado n ≥ 1 se puede expresar como un producto de n polinomios lineales, es decir
DemostraciónSea un polinomio de grado . es una función entera. Para cada constante positiva , existe un número realpositivo tal que
Si no tiene raíces, la función , es una función entera con la propiedad de que para cualquier númeroreal mayor que cero, existe un número positvo tal que
Concluimos que la función es acotada. Pero el teorema de Liouville dice que si es una función entera yacotada, entonces, es constante y esto es una contradicción.De manera que no es entera y por tanto tiene al menos una raíz. se puede escribir por tanto como el producto
donde es una raíz de y es un polinomio de grado . Por el argumento anterior, el polinomio a suvez tiene al menos una raíz y se lo puede factorizar nuevamente.Repitiendo este proceso veces,[3] concluimos que el polinomio p puede escribirse como el producto
donde ... son las raíces de (no necesariamente distintas) y es una constante.
Teorema fundamental del álgebra 215
CorolariosComo el teorema fundamental del álgebra puede ser visto como la declaración de que el cuerpo de los númeroscomplejos es algebraicamente cerrado, se sigue que cualquier teorema concerniente a cuerpos algebraicamentecerrados aplican al cuerpo de los números complejos. Se muestran aquí algunas consecuencias del teorema, acercadel cuerpo de los números reales o acerca de las relaciones entre el cuerpo de los reales y el cuerpo de los complejos:• El cuerpo de los números complejos es la clausura algebraica del cuerpo de números reales.• Todo polinomio en una variable con coeficientes reales es el producto de un polinomio constante de la forma
con real, y polinomios de la forma con y reales y (que es lomismo que decir que el polinomio no tiene raíces reales).
• Toda función racional en una variable , con coeficientes reales, se puede escribir como la suma de una funciónpolinómica con funciones racionales de la forma (donde es un número natural, y y sonnúmeros reales), y funciones racionales de la forma (donde es un númeronatural, y , , , y son números reales tales que ). Un corolario de esto es que todafunción racional en una variable y coeficientes reales tiene una primitiva elemental.
• Toda extensión algebraica del cuerpo de los reales es isomorfa al cuerpo de los reales o al cuerpo de loscomplejos.
Referencias[1] El texto dice: Toda ecuación algebraica en una incógnita z de grado n ≥ 1.... La cita fue adaptada al contexto del artículo.[2] Se dice que el número es una raíz de un polinomio si .[3][3] En el último paso, lo que queda es un polinomio de grado uno multiplicado por una constante
Enlaces externos• Fundamental Theorem of Algebra (http:/ / www. cut-the-knot. org/ do_you_know/ fundamental2. shtml) — a
collection of proofs (en inglés)• D. J. Velleman: The Fundamental Theorem of Algebra: A Visual Approach, PDF (unpublished paper) (http:/ /
www. cs. amherst. edu/ ~djv/ ), visualisation of d'Alembert's, Gauss's and the winding number proofs (en inglés)• Weisstein, Eric W. « Fundamental Theorem of Algebra (http:/ / mathworld. wolfram. com/
FundamentalTheoremofAlgebra. html)» (en inglés). MathWorld. Wolfram Research.
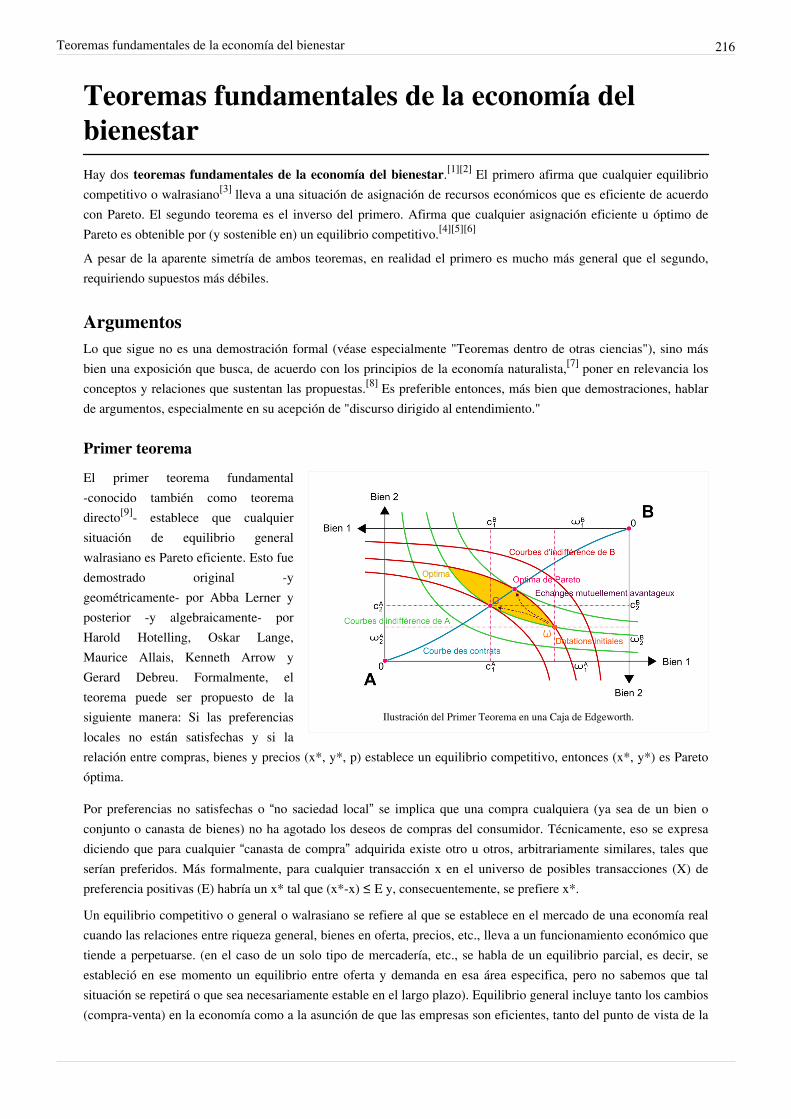
Teoremas fundamentales de la economía del bienestar 216
Teoremas fundamentales de la economía delbienestarHay dos teoremas fundamentales de la economía del bienestar.[1][2] El primero afirma que cualquier equilibriocompetitivo o walrasiano[3] lleva a una situación de asignación de recursos económicos que es eficiente de acuerdocon Pareto. El segundo teorema es el inverso del primero. Afirma que cualquier asignación eficiente u óptimo dePareto es obtenible por (y sostenible en) un equilibrio competitivo.[4][5][6]
A pesar de la aparente simetría de ambos teoremas, en realidad el primero es mucho más general que el segundo,requiriendo supuestos más débiles.
ArgumentosLo que sigue no es una demostración formal (véase especialmente "Teoremas dentro de otras ciencias"), sino másbien una exposición que busca, de acuerdo con los principios de la economía naturalista,[7] poner en relevancia losconceptos y relaciones que sustentan las propuestas.[8] Es preferible entonces, más bien que demostraciones, hablarde argumentos, especialmente en su acepción de "discurso dirigido al entendimiento."
Primer teorema
Ilustración del Primer Teorema en una Caja de Edgeworth.
El primer teorema fundamental-conocido también como teoremadirecto[9]- establece que cualquiersituación de equilibrio generalwalrasiano es Pareto eficiente. Esto fuedemostrado original -ygeométricamente- por Abba Lerner yposterior -y algebraicamente- porHarold Hotelling, Oskar Lange,Maurice Allais, Kenneth Arrow yGerard Debreu. Formalmente, elteorema puede ser propuesto de lasiguiente manera: Si las preferenciaslocales no están satisfechas y si larelación entre compras, bienes y precios (x*, y*, p) establece un equilibrio competitivo, entonces (x*, y*) es Paretoóptima.
Por preferencias no satisfechas o “no saciedad local” se implica que una compra cualquiera (ya sea de un bien oconjunto o canasta de bienes) no ha agotado los deseos de compras del consumidor. Técnicamente, eso se expresadiciendo que para cualquier “canasta de compra” adquirida existe otro u otros, arbitrariamente similares, tales queserían preferidos. Más formalmente, para cualquier transacción x en el universo de posibles transacciones (X) depreferencia positivas (E) habría un x* tal que (x*-x) ≤ E y, consecuentemente, se prefiere x*.
Un equilibrio competitivo o general o walrasiano se refiere al que se establece en el mercado de una economía realcuando las relaciones entre riqueza general, bienes en oferta, precios, etc., lleva a un funcionamiento económico quetiende a perpetuarse. (en el caso de un solo tipo de mercadería, etc., se habla de un equilibrio parcial, es decir, seestableció en ese momento un equilibrio entre oferta y demanda en esa área especifica, pero no sabemos que talsituación se repetirá o que sea necesariamente estable en el largo plazo). Equilibrio general incluye tanto los cambios(compra-venta) en la economía como a la asunción de que las empresas son eficientes, tanto del punto de vista de la
Teoremas fundamentales de la economía del bienestar 217
asignación como de la producción. En este argumento, lo que interesa específicamente es que los precios llevan aventas. Se puede fácilmente demostrar que lo anterior sigue de la asunción más general acerca de mercados (tanto defactores de producción como de productos) perfectamente competitivos.Considérese una transacción o “solución” (S) (compra venta real) entre dos individuos. Tal transacción será parte dela totalidad de posibles compraventas entre dos individuos cualquiera. Todos esos posibles intercambios definen unespacio o “plano” de todas las posibles relaciones (soluciones) entre compras, ventas y precios (S1, S2... Sn).Supóngase, además, que dentro de tal universo existe una solución (S*) en la cual cada participante ha obtenido elmáximo de beneficios posible. (Esa situación es llamada dominancia, Así, por ejemplo, si la relación S1 es preferidaa la solución S2, S1 domina a S2. De acuerdo con esta terminología, S* “domina” a todas las S) La desviación de talsituación implica que ya sea uno o el otro ya sea perderá o no obtendrá parte de los beneficios posibles o seabstendrá de participar en el intercambio. Cuando tal situación (S*) es generalizada en una economía, se está en elÓptimo de Pareto.Supóngase que las condiciones generales del equilibrio económico walrasiano rigen o son validas. Es decir, laRiqueza (R) de un país es igual a la suma (∑) de los bienes (B) que todos los habitantes (h) de ese país poseenmultiplicado por el valor o precio (p) de esos bienes más la suma de dinero que esos habitantes poseen. Pero esedinero es igual a -puede ser descrito como- la suma de los bienes producidos (P) que todas las empresas (e) hanproducido o poseen en ese momento determinado, multiplicado por los precios (p) de esos bienes. Más formalmente:∑h Rh =∑h Bh ⋄ p + ∑Pe . pedonde ∑h Rh es la riqueza total; Bh, el agregado de bienes de todos los h; Pe, el producto de las empresas e, y p es elprecio.Asúmase, finalmente, que esos bienes, precios y riqueza, etc., establecen una relación (Sn) tal que es parte de latotalidad de posibles relaciones entre esos factores, pero es diferente de aquella (S*) que Pareto llama óptima.Considérese: La maximización de preferencias implica que:(No es necesario considerar el caso en el cual la preferencia por Sn sea menor que por S*, porque tal situaciónimplicaría que los individuos escogen transacción es que no dan tanto beneficio como desearían o podrían obtener o-alternativamente- que escogen “ser menos ricos” que lo que podrían, situación que no se observa a menudo.)Si la preferencia por Sn > S*, entonces Bh∙p> Rh.(en otras palabras, si una transacción Sn es preferida a S*, la relación entre bienes y precios seria mayor que la que lariqueza de los individuos permite. Es decir, no se puede obtener)Si preferencia Sn ≥ S*, entonces Bh ⋄ p ≥ Rh.(para verlo, imaginese la misma situación (Sn ≥ S*) pero con Bh ⋄ p< Rh. Es decir, la relación bienes y precios esmenor que la que la riqueza general establece o permite. Podríamos encontrar entonces una relación Sn tal que fuerapreferida a S*. Pero S* es, por definición, la preferida u óptima en términos de maximizar beneficios. Sigue entoncesque cada individuo preferiría Bh ⋄ p ≥ Rh, es decir, maximizar su riqueza.)Ahora, considerese en general una relación de factores (x, y ...) que fuera dominante de acuerdo con Pareto (x*,y*).Esto significa que un parámetro cualquiera (x) será mayor en x* que en algunos de los otros casos y mayor o igual entodos.[10] Es decir, x ≥ x* . (Nota necesaria[11]
Pero, por lo anterior, sabemos que Rh ⋄ p ≥ Rh.Sumarizando se encuentra que Sn no puede ser diferente a S*. De serlo, no se podría obtener Rh ⋄ p ≥ Rh.Esto significa que, dada una relación estable a largo plazo (equilibrio walrasiano) en la cual la riqueza de unasociedad en su conjunto es igual a la suma de todos los bienes -poseídos y en circulación en esa sociedad-multiplicado por el precio de esos bienes y asumiendo tanto que los individuos busquen maximizar su riqueza através de escoger relaciones de intercambio que les sean individualmente favorables como la posibilidad real deimplementar esas opciones, se llegara a una situación óptima, o eficiente, de acuerdo con la definición de Pareto.
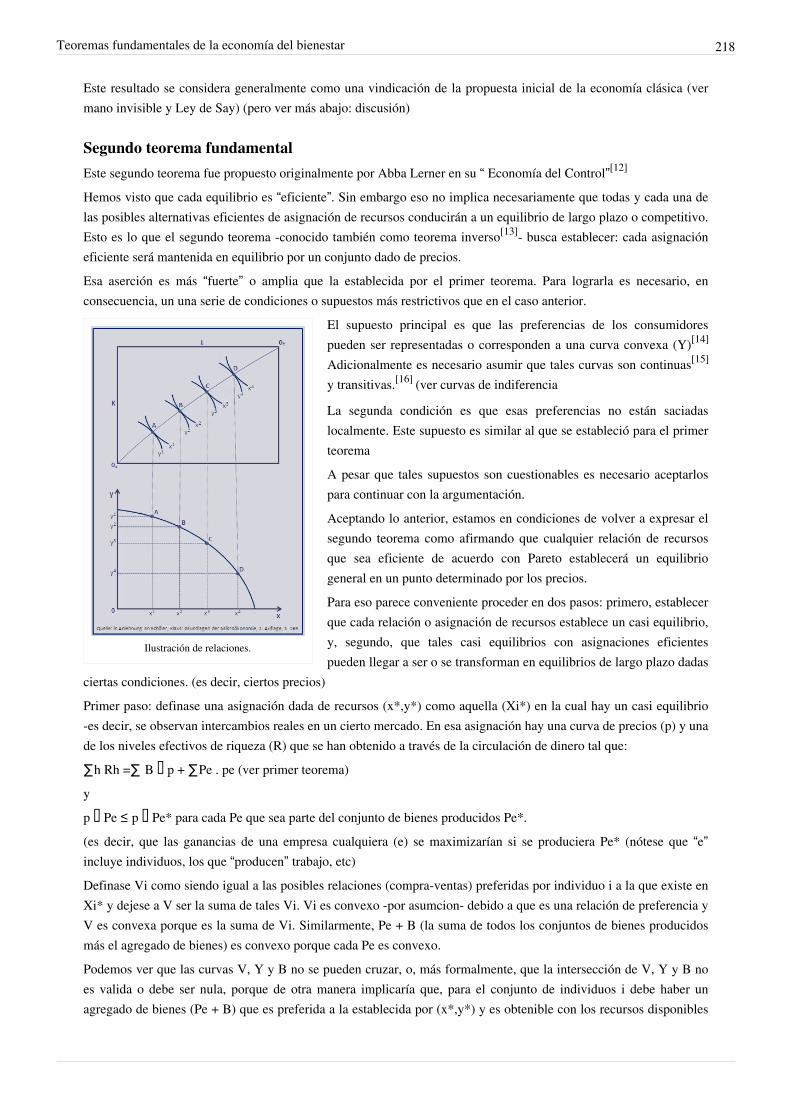
Teoremas fundamentales de la economía del bienestar 218
Este resultado se considera generalmente como una vindicación de la propuesta inicial de la economía clásica (vermano invisible y Ley de Say) (pero ver más abajo: discusión)
Segundo teorema fundamentalEste segundo teorema fue propuesto originalmente por Abba Lerner en su “ Economía del Control”[12]
Hemos visto que cada equilibrio es “eficiente”. Sin embargo eso no implica necesariamente que todas y cada una delas posibles alternativas eficientes de asignación de recursos conducirán a un equilibrio de largo plazo o competitivo.Esto es lo que el segundo teorema -conocido también como teorema inverso[13]- busca establecer: cada asignacióneficiente será mantenida en equilibrio por un conjunto dado de precios.Esa aserción es más “fuerte” o amplia que la establecida por el primer teorema. Para lograrla es necesario, enconsecuencia, un una serie de condiciones o supuestos más restrictivos que en el caso anterior.
Ilustración de relaciones.
El supuesto principal es que las preferencias de los consumidorespueden ser representadas o corresponden a una curva convexa (Y)[14]
Adicionalmente es necesario asumir que tales curvas son continuas[15]
y transitivas.[16] (ver curvas de indiferencia
La segunda condición es que esas preferencias no están saciadaslocalmente. Este supuesto es similar al que se estableció para el primerteoremaA pesar que tales supuestos son cuestionables es necesario aceptarlospara continuar con la argumentación.Aceptando lo anterior, estamos en condiciones de volver a expresar elsegundo teorema como afirmando que cualquier relación de recursosque sea eficiente de acuerdo con Pareto establecerá un equilibriogeneral en un punto determinado por los precios.Para eso parece conveniente proceder en dos pasos: primero, establecerque cada relación o asignación de recursos establece un casi equilibrio,y, segundo, que tales casi equilibrios con asignaciones eficientespueden llegar a ser o se transforman en equilibrios de largo plazo dadas
ciertas condiciones. (es decir, ciertos precios)Primer paso: definase una asignación dada de recursos (x*,y*) como aquella (Xi*) en la cual hay un casi equilibrio-es decir, se observan intercambios reales en un cierto mercado. En esa asignación hay una curva de precios (p) y unade los niveles efectivos de riqueza (R) que se han obtenido a través de la circulación de dinero tal que:∑h Rh =∑ B ⋄ p + ∑Pe . pe (ver primer teorema)yp ⋄ Pe ≤ p ⋄ Pe* para cada Pe que sea parte del conjunto de bienes producidos Pe*.(es decir, que las ganancias de una empresa cualquiera (e) se maximizarían si se produciera Pe* (nótese que “e”incluye individuos, los que “producen” trabajo, etc)Definase Vi como siendo igual a las posibles relaciones (compra-ventas) preferidas por individuo i a la que existe enXi* y dejese a V ser la suma de tales Vi. Vi es convexo -por asumcion- debido a que es una relación de preferencia yV es convexa porque es la suma de Vi. Similarmente, Pe + B (la suma de todos los conjuntos de bienes producidosmás el agregado de bienes) es convexo porque cada Pe es convexo.Podemos ver que las curvas V, Y y B no se pueden cruzar, o, más formalmente, que la intersección de V, Y y B noes valida o debe ser nula, porque de otra manera implicaría que, para el conjunto de individuos i debe haber unagregado de bienes (Pe + B) que es preferida a la establecida por (x*,y*) y es obtenible con los recursos disponibles
Teoremas fundamentales de la economía del bienestar 219
para la suma de individuos. (ver primer teorema)Lo anterior nos permite tratar esas curvas conforme al teorema del eje de separación de Minkowski[17] Aplicado aesta situación, ese teorema muestra que hay un curva de precios diferente a 0 -un número r - tal que p ⋄ v ≥ r paracada v que pertenezca a V y p ⋄ Pe ≤ r por cada Pe que pertenezca a Pe*+ B. En otras palabras, existe un vector deprecios que define una línea que separa perfectamente esos dos conjuntos convexos.Podemos ver también que, dado que la preferencia por Vi ≥ xi* (por definición más arriba), sigue que p (∑ Vi) ≥ r.En otras palabras, dado que hay una relación o ‘canasta de bienes a comprar’ para el individuo (Vi) que es preferida ala establecida por x*, y dado que tal conjunto de relaciones está delimitado por r, sigue que V está delimitado ocerrado matemáticamente por Vi. (en otras palabras, hay un “espacio” constituido por todas las posibles compraspreferenciales de un individuo. Ese espacio está delimitado por el caso de máxima preferencia)Pero lo mismo se aplica a la relación establecida por X. Es decir, hay una (x*) tal que es preferida a todas. Y esa x*establece el límite a todas las contenidas en X. Pero sabemos también que la relación x* es parte de la suma de Pe +B, por lo tanto ∑ x* ≤ r. Sigue por lo tanto que x* = r . (es decir, x* constituye el límite en el cual las preferenciasindividuales se encuentran, o la línea de preferencia que delimita todas las otras curvas de preferencias)Se puede ver entonces que, aún habiendo relaciones de precios y bienes tales que será n preferidas por individuos,los individuos en su conjunto gravitaran al caso que limita cada universo de preferencias individuales. Ese casolímite es x* y es el punto en el cual las preferencias individuales se encuentran o coinciden.Todo lo anterior implica que dada una riqueza tal que Ri = p⋄ x* para cada individuo, se establece un casi equilibrio.En otras palabras, habrá compra-ventas o intercambios reales. Ese punto se establece en el caso que delimita lascurvas individuales de preferencias, es decir, en la establecida por el Óptimo de Pareto.Lo mismo se aplica a empresas.Ahora nos volvemos a la situación que transforma esa estabilidad parcial en una permanente, es decir, en unequilibrio competitivo. Eso es equivalente a decir que las relaciones entre las preferencias individuales“consensuales” establecidas más arriba (x*) y bienes (B) y precios (p) son estables si y solo si p ⋄ x* < ∑ Ri (esdecir, solo si las relaciones son obtenibles dada la riqueza conjunta). Para eso es necesario nuevamente asumir quelas relaciones de preferencias individuales Vi son convexas y continuas (es decir, son relativamente estables, sincambios bruscos).Si ese es el caso, existe una curva de consumo individual (c’i) que pertenece a todas los posibles curvas de consumo(Ci) y es sostenible por la riqueza del individuo (p ⋄ c’i < Ri)Pero sabemos -por el teorema anterior- que:∑h Rh =∑ B ⋄ p + ∑Pe . pedado que i (individuos) no pueden ser otros que h (habitantes) sigue que asumiendo que ∑Pe . pe sea igual que ∑hRh - ∑ B ⋄ p, la situación será estable.En otras palabras, para que un casi equilibrio o equilibrio temporal se transforma en uno permanente basta que lascurvas de consumo sean convexas (ver: teoría de las expectativas racionales) y que exista un bien o una canasta debienes (x*) que a lo más sea igual en deseabilidad (o precio) que las que ya se han obtenido.Siguen entonces que una situación eficiente de acuerdo con Pareto establecerá un equilibrio de largo plazo siasumimos que los consumidores se comportan racionalmente en términos económicos, es decir, si buscan maximizarsus beneficios a partir de una distribución dada de los recursos económicos.Esta conclusión se interpreta, generalmente, como significando que sería posible obtener un estado deseable de distribución de recursos económicos a partir, simplemente, de una redistribución original de tales recursos, sin necesidad posterior de recurrir a “ajustamientos” continuos o repetitivos. Así, por ejemplo, Davis afirma: “(El segundo teorema del bienestar) Dice que, dada algunas restricciones adicionales, un resultado Óptimo de Pareto puede ser conseguido como un equilibrio competitivo a través de transferencias adecuadas de sumas de dinero
Teoremas fundamentales de la economía del bienestar 220
(“lump sum transfers”, en el original) . Así, si no nos gusta el Óptimo de Pareto particular que resulte, enactamos(otras) transferencias que den mejores resultados sociales (dado algún criterio de bienestar social)”[18]
DiscusiónComo hemos visto, el primer teorema es generalmente considerado como la confirmación analítica de la hipótesis de“la mano invisible” de Adam Smith. En otras palabras, la confirmación de la percepción que mercados competitivosllevan a una asignación eficiente de los recursos económicos. En ese sentido -se alega- el teorema apoya la nointervención estatal en asuntos económicos: déjese que el mercado opere libremente y el resultado será eficiente entérminos de Pareto.Sin embargo, se ha sugerido que la situación descrita en el primer teorema depende -a fin de llegar a la eficiencia dePareto- en ciertas condiciones, conocidas en su conjunto como de competencia perfecta. Sin embargo tal condiciónes un ideal que no existe en el mundo real. Por ejemplo Greenwald y Stiglitz publicaron un teorema (el llamadoTeorema de la Asimetría de la información) que establece que, en la presencia ya sea de información imperfecta omercados no perfectamente competitivos, el resultado no es eficiente en términos de Pareto. Sigue que en la mayoríade las situaciones de la economía en el mundo real, esas desviaciones de las condiciones ideales deben ser tomadasen cuenta.[19]
Adicionalmente se ha alegado que eficiencia en términos de Pareto no es ni una definición precisa de “eficiencia”[20]
ni equivalente a deseable. El término “Óptimo de Pareto” simplemente indica una situación en la cual no se puedemejorar la situación de alguien sin hacer que algún otro sea peor . Por ejemplo, si un individuo posee el 99% de lariqueza y el 99% de la población se reparte de alguna manera el otro 1%, eso es un Óptimo de Pareto, en que no sepuede mejorar la situación de ese 99% sin reducir la del individuo que tiene todo. Pero igualmente óptima paraPareto seria la otra situación en la cual cada individuo en una sociedad tenga exactamente lo mismo que cualquierotro. Lo mismo se puede decir de las numerosas posibilidades intermedias. Desde el punto de vista del Óptimo dePareto, no hay un criterio que permita seleccionar una como preferible a las otras. Esto implica que el criterio deoptimalidad de Pareto es débil en relación a elegir propuestas concretas que maximicen el bienestar general.[21]
En consecuencia Amartya Sen señala que sigue que pueden haber muchas situaciones que son eficientes en términode Pareto sin que todas sean igualmente deseables o aceptables desde el punto de vista de la sociedad (o susmiembros).[22]
Aún más, pueden haber situaciones que no son óptimas de acuerdo con Pareto pero que sin embargo son preferiblesdesde el punto de vista general. Por ejemplo, en una situación hipotética en la cual el 10% de la población poseyerael 90% de la riqueza general y el 90% restante de la población poseyera el 10% de la riqueza, medidas redistribuidaspodrían ser vistas en general no sólo como equitables, sino que podrían tener un efecto positivo en la economíageneral, en la medida que un aumento en la demanda puede incrementar la producción. Un argumento en ese sentidoes avanzado por Davis[23] (ver también keynesianismo)Parcialmente como consecuencia de lo anterior, Lerner sugirió una nueva aproximación. Basado en su concepto de“eficiencia de distribución”, la cual se mide en relación a la eficiencia con la cual aquellos que necesitan los bienes yservicios los reciben Lerner argumenta que a la mayor eficiencia de distribución, el mayor bienestar general. Peroesa mejor distribución de bienes y servicios implica a su vez una mejor distribución de los medios de acceso a talesbienes y servicios en la sociedad, o, más formalmente: “asumiendo que una cantidad fija de ingreso, una funciónsocial de bienestar cóncava, funciones individuales de bienestar también de tipo cóncavo, y que estas se distribuyenen forma equiprobabilistica entre los miembros de la sociedad, la maximizacion de la esperanza matemática delbienestar de la sociedad se alcanza solo cuando el ingreso se distribuye de manera igualitaria. (Una demostración deeste teorema se encuentra en Sen, A.K. Sobre la desigualdad económica. Editorial Crítica. (1979).”[24]
Sin embargo tal sugerencia implica la necesidad no solo de un criterio económico para efectuar la redistribución sinoun mecanismo efectivo. Adicionalmente, si, por cualquier motivo aceptamos que los mercados son el mecanismo, sino inmejorable, por lo menos el más efectivo en regular una economía a fin de lograr equilibrio competitivo o,
Teoremas fundamentales de la economía del bienestar 221
alternativamente, creemos que es conveniente en términos, por lo menos, políticos, minimizar las intervenciones delestado, esto impone una demanda adicional sobre las posibles soluciones.El segundo teorema establece que, de la totalidad de posibles resultados que son eficientes en términos de Pareto, sepuede lograr uno específico a través de simplemente alterar las condiciones iniciales y posteriormente dejando que elmercado actúe libremente. En otras palabras, que se puede “escoger” uno de esos resultados a través de ladistribución o redistribución general a la población de una “suma de riqueza” adecuada. Por ejemplo si se distribuyetoda la riqueza de la sociedad igualmente entre sus miembros, esa distribución llevará -según el argumento- a unÓptimo de Pareto. Y, si se asume además que se está en una situación de competencia perfecta, esa distribución seráestable, tenderá a perpetuarse en el futuro.Esto sugiere que la intervención estatal tiene un papel legítimo en política económica: la redistribución nos puedeayudar a implementar, seleccionando entre todos esos posibles resultados Óptimos de acuerdo con Pareto, aquel quetenga las características deseadas, no solo de acuerdo con criterios externos (por ejemplo: ético o políticos) sino deracionalidad económica y bienestar social. Por ejemplo, la propuesta por Lerner.Esta propuesta tiene la ventaja adicional que supera el problema del conocimiento requerido para efectuar otraspropuestas redistribuidas. Como se ha señalado[25] propuestas que requieren la intervención continuada del estado enla economía demandan que el gobierno o cualquiera sea el organismo a cargo de tal intervención posea conocimientoque bordea en lo perfecto de las preferencias de los consumidores y las funciones de producción de las empresas (loque parece, por lo menos, cuestionable) en orden a elegir las medidas de intervención adecuadas. Una redistribución“original” evita ese problema.Sin embargo, no es obvio como un gobierno en el mundo real puede efectuar tal redistribución: transferencias decapital o dinero son difícil de implementar y -consecuentemente- casi nunca empleadas. impuestos proporcionalespueden llegar a tener efectos distorcionantes en la economía en general, en especial, dado que alteran los ingresosrelativos de los factores de producción , distorsionando y disturbando la estructura productiva. Como Davis (op.cit)observa a continuación de lo citado más arriba “Por supuesto, cuando contemplamos el mundo real, mejor tambiénconsideramos si tales transferencias son económica o políticamente realizables.”Posibles soluciones a este problema envuelven, entre otras, consideraciones de “compensación” a quienes seanafectados negativamente por las políticas redistributivas. Varias propuestas existen en ese sentido[26] y tienen unacierta atracción dado que la propuesta: “ se basa en la noción que es probable que pocas políticas vayan a beneficiar(directamente) a absolutamente todos, y que, si ese fuere el criterio quizás seríamos capaces de implementar muypoco”.[27] Así, por ejemplo, si las políticas redistributivas realmente incrementan la producción (a través de unincremento en la demanda) el incremento en las ganancias que resulten de un proceso redistributivo pueden ser vistascomo la compensación necesaria por la demanda en la riqueza (impuestos) que la redistribución impone.
Notas y referencias[1] Kenneth R. Richards Lecture 3: First and Second Theorems of Welfare Economics and Market Efficiency (http:/ / classwebs. spea. indiana.
edu/ kenricha/ Classes/ V625/ Lecture 3/ Lecture 3 V625. pdf)[2] José-Víctor Ríos-Rull : Welfare Theorems (http:/ / www. econ. umn. edu/ ~vr0j/ econ10205/ lectures/ fluct11_welft. pdf)[3] "La definición de equilibrio de mercado que vamos a dar todavía es que todos los mercados se vacían. Sin embargo, al incluir también las
elecciones de los individuos como un elemento explícito del equilibrio, podemos hacer frente a situaciones en las que algunas listas de preciosdejan algunos individuos indiferentes entre las muchas opciones disponibles, y las situaciones en las que algunas listas de precios dejan ciertosindividuos sin una opción óptima en absoluto. Pero más importante, enmarcando las cosas de forma explícita en términos de comportamientoindividual nos ayudará a entender una gama más amplia de fenómenos. ( Mark Walker en Walrasian Equilibrium (http:/ / www. u. arizona.edu/ ~mwalker/ 02_Equilibrium Existence/ DisaggregatedExistenceTheorem. pdf)).- más formalmente: "Un par de vectores de la asignación(x, p), donde x son las cantidades de cada bien en poder por cada agente, y p es un vector de precios por cada bien, es un equilibrio walrasianosi (a) es factible, y (b) cada agente esta eligiendo óptimamente, dado el presupuesto del agente. En un equilibrio walrasiano, si un agenteprefiere otra combinación de bienes, el agente no se lo puede permitir." (Glossary of economics research: walrasian equilibrium (http:/ / www.econterms. com/ glossary. cgiaction=+ + Search+ + & query=walrasian+ equilibrium))
[4] Carl P. Simon y Lawrence Blume (1994): “El segundo teorema es el inverso del primero. Dice que cada óptimo de pareto puede ser establecido como un equilibrio competitivo.” en Mathematics for Economists (http:/ / books. google. co. uk/ books?id=cxSaQgAACAAJ&
Teoremas fundamentales de la economía del bienestar 222
source=gbs_similarbooks) p 574[5] Hal R. Varian: “El segundo teorema de la economia del bienestar establece que en determinadas condiciones todas las asignaciones eficientes
en el sentido de Pareto pueden lograrse mediante el mecanismo del equilibrio competitivo.” en Microeconomía intermedia: un enfoque actual(http:/ / books. google. co. uk/ books?id=-rWfisFu618C& printsec=frontcover#v=onepage& q& f=false) p 544 Corolarios del segundoteorema del bienestar.
[6] Bernard Guerrien: “El segundo teorema es en cierta manera, el recíproco del primero, porque afirma que a todo óptimo de Pareto se puedeasociar un sistema de precios tal que exista a tales precios, un equilibrio competitivo, al menos si los consumidores “prefieren lascombinaciones” y si no hay costos fijos ni rendimientos crecientes. Se concluye de este teorema que si un estado realizable no es un equilibriocompetitivo, entonces no es óptimo según el criterio de Pareto con la condición de que no haya costos fijos etc.” en LAS PROPIEDADESDEL EQUILIBRIO COMPETITIVO (http:/ / www. eumed. net/ cursecon/ libreria/ bg-micro/ 37. htm)
[7] Robert H. Frank: “The Economic Naturalist”.- Basic Books, U.S.A.- 2007[8] Para demostraciones formales, ver cualquiera de los autores indicados más abajo o algún libro de texto de microeconomía. Por ejemplo: Carl
P Simon y Lawrence Blume: Carl P. Simon y Lawrence Blume (1994): “El segundo teorema es el inverso del primero. Dice que cada óptimode pareto puede ser establecido como un equilibrio competitivo.” en Mathematics for Economists (http:/ / books. google. co. uk/books?id=cxSaQgAACAAJ& source=gbs_similarbooks) (W.W. Norton and Co. New York and London- 1994), pp 573-575; etc)
[9] Por ejemplo: Joaquín Almoguera Carreres, Elías Díaz, Silvina Alvarez, Joaquín Almoguera: Estado, Justicia, derechos (Springer Science &Business, 2002)
[10][10] Para establecer dominancia de acuerdo con Pareto basta y sobra que un parámetro cualquiera sea preferido mientras los otros son iguales.Esto implica que en el universo de posible compras preferidas, un parámetro cualquiera será a lo menos igual en todos los casos y,posiblemente, mejor en algunos. En la notación que estamos empleando, mejor equivale a mayor. Ver nota siguiente
[11] Nótese que en la notación generalmente empleada -por Pareto y otros- los símbolos están invertidos. Es decir que , de acuerdo al formalismoque se encuentra generalmente en textos económicos, la relación entre los posibles parámetros (..x,y..) utilizados por los participantes paraevaluar beneficio DISMINUYEN. Así, una posible relación (S1) será preferida a otra (S2) cuando al menos un parámetro (x) es menor en S1que en S2 (x1 < x2). y los otros (y, z) son iguales. Si bien esta inversión de símbolos no vicia el argumento, es necesario tenerlo presente.
[12][12] LERNER, Abba.: Economía del Control. México, Fondo de Cultura Económica (1951)[13][13] Joaquín Almoguera, etc, op. cit.[14] En economía el concepto de curva convexa corresponde en general a la antigua Ley de los rendimientos decrecientes pero expresada en
terminología moderna, para enfatizar el tratamiento matemático que el concepto recibe estos días. Muy en general significa, en este caso, que alo más que se tenga de un bien determinado lo menos que se obtiene en beneficio
[15] es decir, sin “vacíos” o saltos súbitos[16][16] si el bien A se prefiere al bien B, y B a C, entonces A se prefiere a C[17] Una “interpretación al castellano” de este teorema es que dos “formas convexas” no tienen intersección en un plano si y solo si de puede
trazar una línea con una forma en un lado y la otra en el otro. En otras palabras, que entre dos curvas convexas que no se crucen se puedetrazar una “línea de separación” que es perpendicular a un “eje de separación”.
[18] Davis, Donald R. accesible as PDf en Notes in Competitive Trade Theory (http:/ / www. columbia. edu/ ~drd28/ Text. pdf. ) (1994) (p 16)[19][19] Stiglitz, Joseph E. (Marzo de 1991), The Invisible Hand and Modern Economics. NBER Working Paper No. W3641., National Bureau of
Economic Research (NBER)[20] A pesar de que esta ‘eficiencia’ es generalmente descrita como aquella situación en la cual se cumple que no es posible beneficiar a más
elementos de un sistema sin perjudicar a otros, las siguientes palabras de Pareto mismo quizás ayudarán a clarificar el sentido de laproposición: “El bienestar de algunos se puede mantener constante sin que nuestras conclusiones resulten afectadas. Pero si, por el contrario, elpequeño movimiento [de una forma de estado social a otro] aumenta el bienestar de algunos individuos y disminuye el de otros, no puedeafirmarse que el cambio es ventajoso para la colectividad en su conjunto” (Pareto “Economía Matematica” 1911, p 262). Para una examinaciónde implicaciones, ver, por ejemplo: eficiencia económica (http:/ / www. eco-finanzas. com/ diccionario/ E/ EFICIENCIA_ECONOMICA.htm)
[21] Quizás un ejemplo nos ayude a entender las limitaciones. Asumase que los deseos de alguien por más bienes y servicios nunca seansatisfechos, una asignación que de a esa persona todos los bienes y servicios seria eficiente de acuerdo con Pareto. Satisface el requerimientoque no podríamos mejorar la posición de otros sin empeorar la de alguno (en este caso, el que lo tiene todo). Si creemos que esto no es unasituación óptima para la sociedad, debemos admitir que el Óptimo de Pareto no puede ser un criterio completo” (Davis, Donald R, op. cit. p12)
[22] A. Sen en, por ejemplo: “Sobre ética y economía.” - Alianza Editorial, S.A (2003)[23][23] Davis, Donald. op. cit[24] José Luis Estrada López, Angel Escobar Hernández, Oscar Perea García: acceso parcial en Ética y economía: desafíos del mundo
contemporáneo (http:/ / books. google. com/ books?id=ZXh_qWAeu4cC) Plaza y Valdes, (1999)[25] Friedrich von Hayek, por ejemplo: La fatal arrogancia pero ver bibliografía “en línea” más abajo[26][26] Por ejemplo: .- Ver también:[27][27] Davis, op. cit

Teoremas fundamentales de la economía del bienestar 223
Bibliografía• Almoguera Carreres, Joaquín y otros: “Estado, Justicia, derechos” - Springer Science & Business, (2002) accesión
parcial aquí (http:/ / books. google. com/ books?id=qagt_ZJviXkC)•• Lerner, Abba: Economía del Control. - Fondo de Cultura Económica (1951)•• Sen, A.K: Bienestar, Justicia y Mercado:.- Ediciones Paidós Ibérica (1997)•• Sen, A.K: Sobre ética y economía. Alianza Editorial, S.A (2003).•• Stiglitz, Joseph: La economía del sector público. (Antoni Bosch 2000) cap 3.•• Ferguson y J. p Gould: Teoría microeconómica (1984) cap 15.•• Villar, A: Lecciones de Microeconomía. (Antoni Bosch. -1999)
Bibliografía en línea• Aganofow, Alejandro: Los límites de la eficiencia económica en una sociedad democrática. (http:/ / www.
economíainstitucional. com/ pdf/ No16/ aagafonow16. pdf)• García, Pablo y Hoffman, Silvia T: El Bienestar como Preferencia y las Mediciones de Pobreza (http:/ / www.
csociales. uchile. cl/ publicaciones/ moebio/ 13/ garcia. htm)• Gavito, , Leopoldo P.: Una Aproximación Elemental a la Microeconomía (http:/ / lepoldogavito. blogspot. com/
2008/ 09/ una-aproximacin-elemental-la. html)• Gonzales, Jorge Ivan: POLÍTICOS, PREDICADORES Y MERCADOS (http:/ / www. economiainstitucional.
com/ pdf/ No1/ jgonzalez1. pdf) (comentario sobre un libro)• Hayek, Friedrich A. (September 1945), "The Use of Knowledge in Society" (http:/ / www. econlib. org/ library/
Essays/ hykKnw1. html), American Economic Review (American Economic Association) XXXV (No. 4):519-530, (en inglés)
• Sen, A.K: Debates sobre teoría del capital (http:/ / www. fce. unal. edu. co/ media/ files/ documentos/ Cuadernos/29/ v17n29_sen_debates_1998. pdf). (Artículo - 1974)
• Sen, A.K revision de : BIENESTAR, JUSTICIA Y MERCADO (http:/ / dialnet. unirioja. es/ servlet/oaiart?codigo=1457413) en “Revista española de control externo” Vol. 1, Nº 1, 1999 , (pags. 224-226)
• KC Border (2001): The Second Welfare Theorem (http:/ / www. hss. caltech. edu/ ~kcb/ Notes/ SecondWelfare.pdf)
• Artículo de opinión: Latinoamérica necesita una política fiscal más redistributiva, dicen expertos (http:/ / www.elconfidencial. com/ cache/ 2009/ 03/ 24/ 96_latinoamerica_necesita_politica_fiscal_redistributiva_dicen. html)

Lema fundamental de teoría de cribas 224
Lema fundamental de teoría de cribasEn teoría de números, más específico en teoría de cribas, el lema fundamental de teoría de cribas es uno de variosresultados que sistematizan el proceso de aplicar métodos de cribado a problemas particulares. Halberstam y Richertaseguran:
Un hecho curioso en la literatura de los métodos de cribado, es que si bien se usa frecuentemente elmétodo de Brun, hay pocos intentos de formular un teorema general de Brun (tal como el teorema 2.1);como resultado, existen demasiados trabajos sorprendentes los cuales repiten en considerable detalle lospasos del argumento de Brun.
Diamond y Halberstam le atribuyeron la terminología Lema Fundamental a Jonas Kubilius.
Notación ComúnUsaremos la siguiente notación:• A es un conjunto de X enteros positivos, esto es |A|=X, y Ad es el subconjunto de A de enteros divisibles por d.• w(d) y Rd son funciones de A y de d que estiman el número de elementos de A que son divisibles por d, acorde a
la fórmula
Luego w(d) / d representa una densidad aproximada de miembros divisibles por d, y Rd representa un error otérmino residuo.
• P es un conjunto de primos, y P(z) es el producto de los elementos de este que son menores o iguales a z• S(A, P, z) es el número de elementos de A que no son divisibles por cualquier primo en P esto es ≤ z• κ es una constante, llamada la densidad distinguidora, que aparece en las hipótesis anteriores . Este medida de
peso es una media ponderada del número de clases residuales borradas por cada primo.
Lema fundamental de la criba combinatoriaEsta formulación es de Tenenbaum. Otras formulaciones en Halberstam y Richert, en Greaves, y en Friedlander yIwaniec. Consideremos las siguiente hipótesis:• w(d) es una función multiplicativa.• La densidad distinguidora κ satisface, para alguna constante C y cualquier par de números reales η and ξ con 2 ≤
η ≤ ξ:
Existe un parámetro u ≥ 1 esto es, a nuestra disposición. Tenemos uniformente en A, X, z, y u que
Para ciertas aplicaciones fijamos u de manera que obtengamos el mejor término de error posible. En la criba estorepresenta el número de niveles en el principo de inclusión-exclusión.
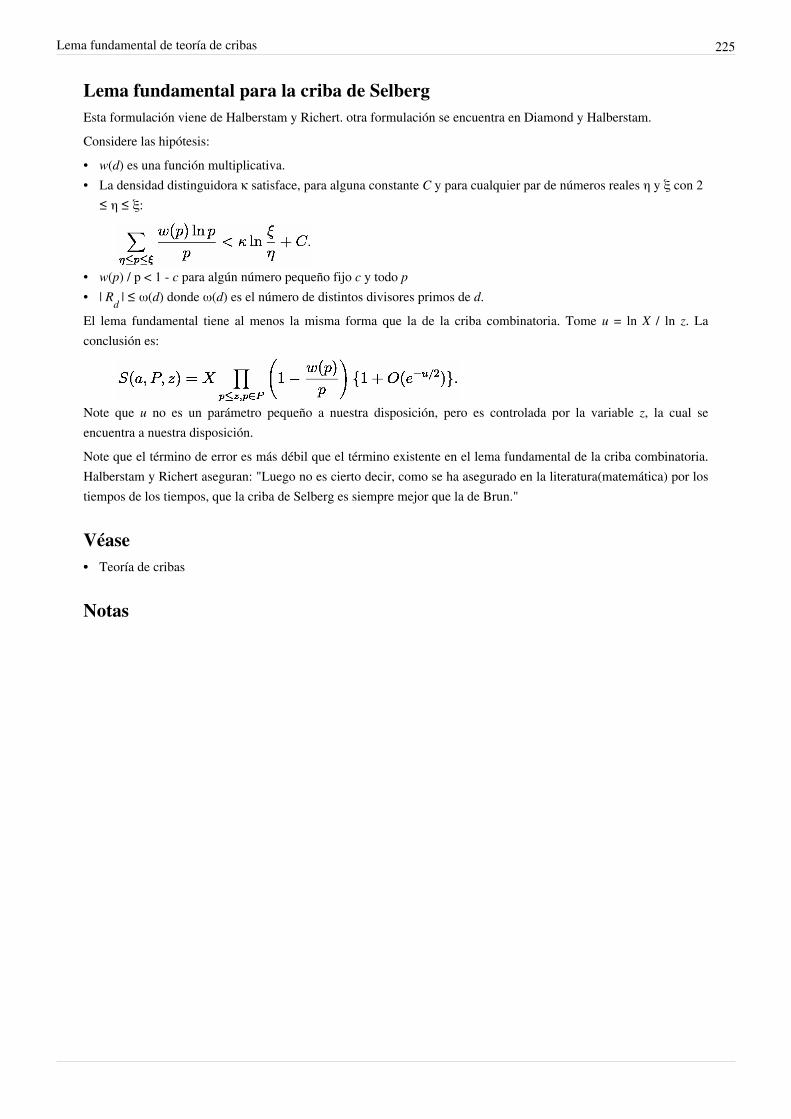
Lema fundamental de teoría de cribas 225
Lema fundamental para la criba de SelbergEsta formulación viene de Halberstam y Richert. otra formulación se encuentra en Diamond y Halberstam.Considere las hipótesis:• w(d) es una función multiplicativa.• La densidad distinguidora κ satisface, para alguna constante C y para cualquier par de números reales η y ξ con 2
≤ η ≤ ξ:
• w(p) / p < 1 - c para algún número pequeño fijo c y todo p• | Rd | ≤ ω(d) donde ω(d) es el número de distintos divisores primos de d.El lema fundamental tiene al menos la misma forma que la de la criba combinatoria. Tome u = ln X / ln z. Laconclusión es:
Note que u no es un parámetro pequeño a nuestra disposición, pero es controlada por la variable z, la cual seencuentra a nuestra disposición.Note que el término de error es más débil que el término existente en el lema fundamental de la criba combinatoria.Halberstam y Richert aseguran: "Luego no es cierto decir, como se ha asegurado en la literatura(matemática) por lostiempos de los tiempos, que la criba de Selberg es siempre mejor que la de Brun."
Véase•• Teoría de cribas
Notas
Fuentes y contribuyentes del artículo 226
Fuentes y contribuyentes del artículoÁlgebra de Borel Fuente: https://es.wikipedia.org/w/index.php?oldid=66521595 Contribuyentes: CSTAR, Fibonacci, Superzerocool, Tano4595
Compacidad local Fuente: https://es.wikipedia.org/w/index.php?oldid=68786396 Contribuyentes: Davius, Ignacio Icke, Jorgechp, Segedano, 6 ediciones anónimas
Espacio compacto Fuente: https://es.wikipedia.org/w/index.php?oldid=70789534 Contribuyentes: 333, Aitorzubiaurre, Cgb, Davius, Dianai, Egaida, Filipo, HUB, Jerowiki, Juan Marquez, JuanMayordomo, Kakaolat87, Kismalac, LuchoX, Martin Rizzo, Matudelo, Millars, NaBUru38, Niqueco, Poc-oban, Ricardogpn, Suitangi, Topologo87, Vitamine, Walterotta, Wewe, 22 edicionesanónimas
Paul Halmos Fuente: https://es.wikipedia.org/w/index.php?oldid=69680804 Contribuyentes: Avicentegil, Ceancata, Copydays, Gaeddal, Gaudio, Helmy oved, Huinca, Juan Mayordomo, Juliogrillo, Mcetina, Mordecki, Pdenapo, 8 ediciones anónimas
Espacio separable Fuente: https://es.wikipedia.org/w/index.php?oldid=65131394 Contribuyentes: Balderai, Davius, Jarisleif, Juan Mayordomo, Te Henua, 2 ediciones anónimas
Espacio métrico Fuente: https://es.wikipedia.org/w/index.php?oldid=70169639 Contribuyentes: Acratta, Allforrous, Aparejador, Brobdingnag, Camiloalcubo2, Davius, Diegusjaimes,GermanX, Greek, Gustronico, HUB, Ingenioso Hidalgo, Jorge c2010, Joseaperez, Juan Mayordomo, Lauranrg, Moriel, Periku, Rigenea, Roman.astaroth, Rovnet, Sabbut, Tano4595, Tonyslash60,Wewe, Xsm34, 83 ediciones anónimas
Σ-álgebra Fuente: https://es.wikipedia.org/w/index.php?oldid=69669829 Contribuyentes: Bunder, CSTAR, Equi, Fibonacci, Grizzly Sigma, HUB, Jose32, Julio grillo, Magister Mathematicae,Ricardogpn, Richard8933, Sardur, Wewe, 22 ediciones anónimas
Álgebra de conjuntos Fuente: https://es.wikipedia.org/w/index.php?oldid=71383893 Contribuyentes: Acratta, Ascánder, Açipni-Lovrij, Comae, Diegusjaimes, Digitalfredy, Dnu72,Eduardosalg, HiTe, Ingenioso Hidalgo, Jaxielle, Jkbw, Jomra, Juanes.the.best, Kismalac, Leonpolanco, Linkedark, Lipedia, Melocoton, Qwertyytrewqqwerty, Technopat, Travelour, Unaiaia,Vitamine, Waka Waka, 46 ediciones anónimas
Anillo de conjuntos Fuente: https://es.wikipedia.org/w/index.php?oldid=64537145 Contribuyentes: Farisori
Espacio de Sóbolev Fuente: https://es.wikipedia.org/w/index.php?oldid=65701745 Contribuyentes: Davius, Euclides, Jkbw, Juan Mayordomo, Lualalsa, 4 ediciones anónimas
Teoría de la medida Fuente: https://es.wikipedia.org/w/index.php?oldid=71189270 Contribuyentes: Acratta, AlfonsoERomero, Banfield, Correogsk, Daniki7, Davius, Deivis, Diegusjaimes,Eduardosalg, Elwikipedista, Emiduronte, Farisori, Fibonacci, FrancoGG, Gato ocioso, Ivn, Jkbw, Jorge c2010, Milder.q, Morytelov, Ricardogpn, Sabbut, Tano4595, Technopat, Wewe, Zladmat,42 ediciones anónimas
Casi en todas partes Fuente: https://es.wikipedia.org/w/index.php?oldid=65257158 Contribuyentes: Davius, Raulshc, 1 ediciones anónimas
Coeficiente de Sorensen-Dice Fuente: https://es.wikipedia.org/w/index.php?oldid=69447875 Contribuyentes: Ivanpares
Conjunto de Borel Fuente: https://es.wikipedia.org/w/index.php?oldid=49406972 Contribuyentes: .José, Egaida, El Megaloco, Ggenellina, Lucien leGrey, Wewe, 2 ediciones anónimas
Conjunto de Cantor Fuente: https://es.wikipedia.org/w/index.php?oldid=71353791 Contribuyentes: Acratta, Anatoli1024, Aracne, Davius, Fabiocalde, Gato ocioso, GermanX, HUB, JViejo,JacobRodrigues, Jerowiki, Joseaperez, KnightRider, Moriel, Pieter, R2D2!, Robertec, Romero Schmidtke, Sabbut, Sauron, Shectore, WikiCholi, Xatufan, Xenon chile, 41 ediciones anónimas
Conjunto de Nikodym Fuente: https://es.wikipedia.org/w/index.php?oldid=44460196 Contribuyentes: Cgb
Conjunto de Smith-Volterra-Cantor Fuente: https://es.wikipedia.org/w/index.php?oldid=65058786 Contribuyentes: Farisori, Gato ocioso, Sabbut
Conjunto de Vitali Fuente: https://es.wikipedia.org/w/index.php?oldid=65025392 Contribuyentes: Fibonacci, Wewe, 6 ediciones anónimas
Ergodicidad Fuente: https://es.wikipedia.org/w/index.php?oldid=67028550 Contribuyentes: Asocall, BlackBeast, Davius, Tot12, 5 ediciones anónimas
Espacio de medida Fuente: https://es.wikipedia.org/w/index.php?oldid=65798314 Contribuyentes: Davius, 3 ediciones anónimas
Espacios Lp Fuente: https://es.wikipedia.org/w/index.php?oldid=65158969 Contribuyentes: Alberto5000, Correogsk, Davius, Juan Mayordomo, MarceloTapiaGaete, Raulshc, Spyglass007, 9ediciones anónimas
Esperanza condicional Fuente: https://es.wikipedia.org/w/index.php?oldid=71584770 Contribuyentes: Ivanpares
Función de Cantor Fuente: https://es.wikipedia.org/w/index.php?oldid=70270242 Contribuyentes: Amirki, Davius, Dnu72, JViejo, Juan Mayordomo, 1 ediciones anónimas
Función de cuadrado integrable Fuente: https://es.wikipedia.org/w/index.php?oldid=71616040 Contribuyentes: Agualin, Davius, Juan Mayordomo, MathsPoetry, Raulshc, 10 edicionesanónimas
Función indicatriz Fuente: https://es.wikipedia.org/w/index.php?oldid=64945818 Contribuyentes: Gusbelluwiki, Jordi Burguet Castell, Juan Mayordomo, Raystorm, 4 ediciones anónimas
Función localmente integrable Fuente: https://es.wikipedia.org/w/index.php?oldid=64945847 Contribuyentes: Davius, Juan Mayordomo, 4 ediciones anónimas
Función medible Fuente: https://es.wikipedia.org/w/index.php?oldid=67946197 Contribuyentes: CayoMarcio, Juan Mayordomo, Manuel Valadez Sánchez, 1 ediciones anónimas
Hipervolumen Fuente: https://es.wikipedia.org/w/index.php?oldid=26517739 Contribuyentes: Davius, JMCC1, Muro de Aguas
Integral de Lebesgue Fuente: https://es.wikipedia.org/w/index.php?oldid=71703188 Contribuyentes: Alfredobi, Alfredomalagon, Anacleto, Cratón, Davius, Edslov, Erick GR, Erud, Flobo,Fportales, Gerardpc, Jmsescribano, Lluvia, Magister Mathematicae, Mar del Sur, Matdrodes, Raulshc, Ricardogpn, Rosarinagazo, Vivero, 42 ediciones anónimas
Medida de Lebesgue Fuente: https://es.wikipedia.org/w/index.php?oldid=68764091 Contribuyentes: Davius, Egaida, Farisori, Fibonacci, Ricardogpn, Snakefang, 16 ediciones anónimas
Medida de probabilidad Fuente: https://es.wikipedia.org/w/index.php?oldid=69184145 Contribuyentes: Acratta, Davius, Echani, Farisori, Maxxcan, Pjresquerdo, 9 ediciones anónimas
Medida espectral Fuente: https://es.wikipedia.org/w/index.php?oldid=64946843 Contribuyentes: CSTAR, Davius, Ucevista
Medida exterior Fuente: https://es.wikipedia.org/w/index.php?oldid=64946846 Contribuyentes: Chzelada, Dangelin5, Egaida, 2 ediciones anónimas
Teoría ergódica Fuente: https://es.wikipedia.org/w/index.php?oldid=71544080 Contribuyentes: Acratta, Alexav8, Alfredobi, Cerpo, Davius, Drake 81, Eameciego, Elferdo, Gaeddal, Gatoocioso, GermanX, Libertad y Saber, Manuelt15, Mcetina, Xocoyote, 13 ediciones anónimas
Teorema de Carathéodory Fuente: https://es.wikipedia.org/w/index.php?oldid=65825473 Contribuyentes: Alfredobi, Farisori, Juan Mayordomo, Kakaolat87, RoyFocker, 6 ediciones anónimas
Paradoja de Banach-Tarski Fuente: https://es.wikipedia.org/w/index.php?oldid=71405303 Contribuyentes: Fibonacci, HUB, HardBlade, Juan Mayordomo, Luis Felipe Schenone, Maldoror,Picasso-Euler, Qwertyytrewqqwerty, Sanbec, Sejomagno, Tano4595, Varano, 11 ediciones anónimas
Teorema de Radon–Nikodym Fuente: https://es.wikipedia.org/w/index.php?oldid=65086474 Contribuyentes: Alvarohv, Cgb, Juan Mayordomo, Manuel Valadez Sánchez
Teorema del sándwich de jamón Fuente: https://es.wikipedia.org/w/index.php?oldid=68121551 Contribuyentes: Alexav8, Bachi 2805, Belgrano, Cinabrium, Eloy, Emijrp, Götz, IngeniosoHidalgo, Juan Mayordomo, Khaine, Magister Mathematicae, Tamorlan, Tano4595, Tomatejc, 15 ediciones anónimas
Teorema de aproximación de Weierstrass Fuente: https://es.wikipedia.org/w/index.php?oldid=64542695 Contribuyentes: .José, Alfredobi, Juan Mayordomo, Raulshc, 1 ediciones anónimas
Fuentes y contribuyentes del artículo 227
Teorema de Arzelá-Ascoli Fuente: https://es.wikipedia.org/w/index.php?oldid=64542093 Contribuyentes: Alfredobi, Davius, Farisori, Juan Mayordomo, Walterotta, 8 ediciones anónimas
Teorema de Bolzano-Weierstrass Fuente: https://es.wikipedia.org/w/index.php?oldid=70074239 Contribuyentes: Alfredobi, Ascánder, Axxgreazz, Damifb, Davidnr, Dodo, Facucampos,Farisori, Gimlinu, Isha, Juan Marquez, Juan Mayordomo, OMenda, Opinador, Raulshc, Sanbec, Sasquatch21, ScaniwoR, Spyglass007, Sunsinron, Taichi, Tano4595, Theoretical physicist,XanaG, Yerayalfa, 9 ediciones anónimas
Teorema de Cartan Fuente: https://es.wikipedia.org/w/index.php?oldid=64542154 Contribuyentes: Ascánder, Belgrano, Boogiepazzo, Charlitos, Davius, Dianai, Jokingonzalez, Pino, Taichi, 1ediciones anónimas
Teorema de convolución Fuente: https://es.wikipedia.org/w/index.php?oldid=64542732 Contribuyentes: Alfredobi, Egaida, Farisori, Juan Mayordomo, Matdrodes, Mcapdevila, Nolaiz,Vitamine, Zeadoc, 9 ediciones anónimas
Lema de Cotlar Fuente: https://es.wikipedia.org/w/index.php?oldid=64754963 Contribuyentes: Balderai, Demiannnn, Dogor, Farisori, Juan Mayordomo, Rovnet, 2 ediciones anónimas
Criterio de Leibniz Fuente: https://es.wikipedia.org/w/index.php?oldid=64856660 Contribuyentes: Davius, GermanX, Ingenioso Hidalgo, Jerowiki, Juan Mayordomo, Mrzeon,PabloCastellano, Tomatejc, Zagahlo, 5 ediciones anónimas
Teorema de descomposición espectral Fuente: https://es.wikipedia.org/w/index.php?oldid=69450363 Contribuyentes: Alfredobi, Cinabrium, Davius, Diegusjaimes, FAR, Factorx, Farisori,Fcr, Felipeochoa0918, Juan Mayordomo, Leonpolanco, Paralitixmen, Sergio Alvaré, 9 ediciones anónimas
Dualidad de Pontryagin Fuente: https://es.wikipedia.org/w/index.php?oldid=64514978 Contribuyentes: CSTAR, Davidsevilla, Davius, DefLog, Dodo, Elwikipedista, GermanX, Hlnodovic,Ivn, Libertad y Saber, Matdrodes, Rsg, Sanbec, 18 ediciones anónimas
Teorema de Fermat (análisis) Fuente: https://es.wikipedia.org/w/index.php?oldid=70090864 Contribuyentes: Aizporrujaxinto, Alfredobi, Farisori, Fotop, Ingenioso Hidalgo, Irbian,Joseaperez, Juan Mayordomo, Juliabis, Magister Mathematicae, Moriel, Pino, RGLago, Raulshc, Reanduro, Riveravaldez, Taichi, Tano4595, 8 ediciones anónimas
Teorema de Fuchs Fuente: https://es.wikipedia.org/w/index.php?oldid=64542284 Contribuyentes: Juan Mayordomo, Uruk, 1 ediciones anónimas
Teorema de la función abierta Fuente: https://es.wikipedia.org/w/index.php?oldid=66154450 Contribuyentes: Belgrano, Cookie, Davius, DefLog, Erzbischof, 8 ediciones anónimas
Teorema de la función inversa Fuente: https://es.wikipedia.org/w/index.php?oldid=65018899 Contribuyentes: Alfredobi, Davius, Eduardosalg, Farisori, Fcrizul, Gato ocioso, Isha, JuanMarquez, Juan Mayordomo, Martínhache, Orly01, Seba91, Tano4595, Tirithel, Ucevista, 31 ediciones anónimas
Teorema de Hahn–Banach Fuente: https://es.wikipedia.org/w/index.php?oldid=64542325 Contribuyentes: Alfredobi, Farisori, Juan Mayordomo, Surscrd
Teorema de Heine-Borel Fuente: https://es.wikipedia.org/w/index.php?oldid=71040438 Contribuyentes: .José, Alfredobi, Cgb, Davius, Farisori, Francisco J. de Anda, Jorge Becerra Garrido,Juan Marquez, Juan Mayordomo, Wewe, 5 ediciones anónimas
Teorema de Heine-Cantor Fuente: https://es.wikipedia.org/w/index.php?oldid=69097081 Contribuyentes: Nazarenads, Wikielwikingo
Teorema de Kirszbraun Fuente: https://es.wikipedia.org/w/index.php?oldid=64508992 Contribuyentes: Angus, Belgrano, GermanX, Juan Mayordomo, 3 ediciones anónimas
Teorema de Liouville (análisis complejo) Fuente: https://es.wikipedia.org/w/index.php?oldid=64534099 Contribuyentes: Alexav8, Belgrano, Comae, Davius, Farisori, Heliocrono, Ismaelbej,JViejo, Jtico, MatiasBellone, Raulshc, Tano4595, 15 ediciones anónimas
Teorema de representación conforme de Riemann Fuente: https://es.wikipedia.org/w/index.php?oldid=64542936 Contribuyentes: Belgrano, Davius, Digigalos, Juan Mayordomo, LourdesCardenal, Magister Mathematicae, Nawiks, 3 ediciones anónimas
Teoremas de Mertens Fuente: https://es.wikipedia.org/w/index.php?oldid=64543089 Contribuyentes: Jerowiki, Juan Mayordomo, Sabbut
Teorema de Ostrowski y Reich Fuente: https://es.wikipedia.org/w/index.php?oldid=63781548 Contribuyentes: Alfredobi, Farisori, Gafotas, Juan Mayordomo, Kalimeros, Sabbut, 4 edicionesanónimas
Teorema de Peter-Weyl Fuente: https://es.wikipedia.org/w/index.php?oldid=64542519 Contribuyentes: Alexav8, Ascánder, Belgrano, Boogiepazzo, Charlitos, Davidsevilla, Davius, Gatoocioso, Jdelrio, Orgullomoore, Tano4595, 1 ediciones anónimas
Teorema de Picard Fuente: https://es.wikipedia.org/w/index.php?oldid=59812401 Contribuyentes: Davius, JMCC1, Juan Mayordomo, Xsm34
Teorema de Picard-Lindelöf Fuente: https://es.wikipedia.org/w/index.php?oldid=70933166 Contribuyentes: Ampersand &, Davius, Fouri87, JMCC1, Jkbw, LuchoX, Raulshc, Shooke,Sylfred1977, Xsm34, 6 ediciones anónimas
Principio de los intervalos encajados Fuente: https://es.wikipedia.org/w/index.php?oldid=64529004 Contribuyentes: Grillitus, Logarithmika Magus, Raulshc, 1 ediciones anónimas
Teorema de representación de Riesz Fuente: https://es.wikipedia.org/w/index.php?oldid=68796332 Contribuyentes: Belgrano, DefLog, Farisori, GermanX, Igna, Juan Marquez, JuanMayordomo, Rbadinez, 6 ediciones anónimas
Teorema de Sturm Fuente: https://es.wikipedia.org/w/index.php?oldid=64542629 Contribuyentes: Alfredobi, Farisori, Folkvanger, Hanjin, Hoenheim, Juan Mayordomo, Mel 23, Mizuno,Veon, 2 ediciones anónimas
Teorema de Bohr-Mollerup Fuente: https://es.wikipedia.org/w/index.php?oldid=67535684 Contribuyentes: Juan Mayordomo, Raulshc
Teorema de factorización de Weierstrass Fuente: https://es.wikipedia.org/w/index.php?oldid=64542782 Contribuyentes: Raulshc
Teorema de Hurwitz (análisis complejo) Fuente: https://es.wikipedia.org/w/index.php?oldid=64542345 Contribuyentes: Raulshc
Teorema de inversión de Lagrange Fuente: https://es.wikipedia.org/w/index.php?oldid=64542790 Contribuyentes: Uruk
Teorema de la gráfica cerrada Fuente: https://es.wikipedia.org/w/index.php?oldid=64542850 Contribuyentes: Farisori, Juan Mayordomo, Tano4595, 3 ediciones anónimas
Teorema de Sard Fuente: https://es.wikipedia.org/w/index.php?oldid=65485345 Contribuyentes: Ivanpares
Teorema de superposición de Kolmogórov Fuente: https://es.wikipedia.org/w/index.php?oldid=61811687 Contribuyentes: Davius
Teorema de Weierstrass-Casorati Fuente: https://es.wikipedia.org/w/index.php?oldid=67709086 Contribuyentes: Eseotres, Raulshc, 1 ediciones anónimas
Teorema de Weierstrass Fuente: https://es.wikipedia.org/w/index.php?oldid=69199346 Contribuyentes: Alpha Floor, Axxgreazz, Belgrano, Cyberplant, Dodo, Ealmagro, El escriba sentado,Farisori, Jerowiki, Juan Marquez, Juan Mayordomo, Kanesue, Lightbringer, Magister Mathematicae, Moriel, NeoFoX, Porao, RamonCelma, Raulshc, Tano4595, Xakalito, 27 ediciones anónimas
Teorema de Gauss-Bonnet Fuente: https://es.wikipedia.org/w/index.php?oldid=64542289 Contribuyentes: Belgrano, DefLog, GermanX, Juan Mayordomo, Pino, Raulshc, Tano4595,Xenoforme, 5 ediciones anónimas
Teorema de Gauss-Bonnet generalizado Fuente: https://es.wikipedia.org/w/index.php?oldid=66513437 Contribuyentes: 333, DefLog, Juan Mayordomo, Raulshc, Tano4595
Teorema de Stokes Fuente: https://es.wikipedia.org/w/index.php?oldid=68136532 Contribuyentes: Andrezitofer, Aqui c, Davius, DefLog, Dnu72, Farisori, Fbarrientos, Gato ocioso, GermanX,JetDriver, Jkbw, Juan Mayordomo, Kenrych, Kved, Laurentius IT, Parodrilo, Pino, RGLago, SirSlither, SuperBraulio13, XalD, 22 ediciones anónimas
Theorema egregium Fuente: https://es.wikipedia.org/w/index.php?oldid=71334486 Contribuyentes: Allforrous, Davius, Erik Streb, Juan Mayordomo, Sabbut, Spyglass007, 2 edicionesanónimas
Fuentes y contribuyentes del artículo 228
Teorema de la base de Hilbert Fuente: https://es.wikipedia.org/w/index.php?oldid=70058900 Contribuyentes: Acratta, Belgrano, Ganímedes, GermanX, Juan Mayordomo, Martingala, Rovnet,3 ediciones anónimas
Teorema de torsión de Mazur Fuente: https://es.wikipedia.org/w/index.php?oldid=64932429 Contribuyentes: Farisori, Gafotas, Juan Mayordomo, Marsal20, Rafagb, Uruk
Teorema de Nagell-Lutz Fuente: https://es.wikipedia.org/w/index.php?oldid=64542500 Contribuyentes: Alfredobi, Farisori, Juan Mayordomo, Rafagb
Conjetura de Hodge Fuente: https://es.wikipedia.org/w/index.php?oldid=71849280 Contribuyentes: Banfield, Camima, Galaxy4, Mercenario97, Raulshc, Roman.astaroth, 11 edicionesanónimas
Geometría algebraica Fuente: https://es.wikipedia.org/w/index.php?oldid=70001344 Contribuyentes: Acratta, Allforrous, Cobalttempest, Correogsk, El.tobal, Elwikipedista, Especiales, F.A.A,GermanX, HUB, Ingenioso Hidalgo, Ivn, JMCC1, Jesusadc, Manwë, Pececito, Pólux, Raulshc, Sabbut, Sanbec, 24 ediciones anónimas
Variedad algebraica Fuente: https://es.wikipedia.org/w/index.php?oldid=64705683 Contribuyentes: Davius, Ezarate, GermanX, Jorghex, Juan Mayordomo, Mutari, Raulshc, Resped,Riveravaldez, Uruk, Wewe, 2 ediciones anónimas
Dualidad de Poincaré Fuente: https://es.wikipedia.org/w/index.php?oldid=71609245 Contribuyentes: Akhram, DefLog, Gafotas, GermanX, 2 ediciones anónimas
Cohomología de De Rham Fuente: https://es.wikipedia.org/w/index.php?oldid=64523568 Contribuyentes: DefLog, Digigalos, Gato ocioso, Irina Gelbukh, Juan Marquez, Kadellar, Mandramas,4 ediciones anónimas
Variedad de Kähler Fuente: https://es.wikipedia.org/w/index.php?oldid=64666684 Contribuyentes: Davius, DefLog, E1324, Gato ocioso, KlausN, Zero spartan, 1 ediciones anónimas
Variedad diferenciable Fuente: https://es.wikipedia.org/w/index.php?oldid=66071457 Contribuyentes: Aliman5040, Artra, Banana04131, Davius, Durero, Gato ocioso, Genba, HiTe, IgnacioIcke, Juan Marquez, Lauranrg, Mafores, Marianov, Rigenea, TiaKarina, Usuwiki, Wewe, Xtquique, 16 ediciones anónimas
Forma diferencial Fuente: https://es.wikipedia.org/w/index.php?oldid=64516765 Contribuyentes: Abelacoa, Alex15090, Artra, Atila rey, Davius, DefLog, Dianai, Fmercury1980, Jkbw, JuanMarquez, Raulshc, Snakefang, Xtquique, 4 ediciones anónimas
Anexo:Problemas no resueltos de la matemática Fuente: https://es.wikipedia.org/w/index.php?oldid=71005175 Contribuyentes: Angus, Ascánder, Baldesco, Blitox, Dani 63, Dark, Davius,Death Master, Felixdavid, Hormigo, Humberto, Ianm, Ingenioso Hidalgo, JViejo, Jecanre, Juan Mayordomo, Julie, Kaninchen, Lucien leGrey, Mahadeva, Mahey94, Manuguay, Moriel, Natrix,Pablo.rosciani, Retama, RoyFocker, Sabbut, Sanbec, Snakeyes, Sol&s, Superzerocool, Tano4595, Tomatejc, Toranks, Tortillovsky, Varano, Vic Fede, Wricardoh, Xatufan, Zoid, 87 edicionesanónimas
Clases de complejidad P y NP Fuente: https://es.wikipedia.org/w/index.php?oldid=71848976 Contribuyentes: AnselmiJuan, Banfield, Belb, Bigsus, Brobdingnag, Cobalttempest, Dogor,Dreitmen, Eyliss, Ezarate, Farisori, Folkvanger, Götz, Irbian, JacobRodrigues, Juan Mayordomo, Laura Fiorucci, LuqueII, Mercenario97, Paintman, Pepelopex, Poco a poco, Raulshc, Siabef,Taichi, Tirithel, Uruk, Vix929, 55 ediciones anónimas
Conjetura de Birch y Swinnerton-Dyer Fuente: https://es.wikipedia.org/w/index.php?oldid=71849454 Contribuyentes: Banfield, EizoOlderog, Gusgus, Hoenheim, Kender00, Raulshc, Saloca,Toranks, Vivero, 5 ediciones anónimas
Conjetura de Collatz Fuente: https://es.wikipedia.org/w/index.php?oldid=68598687 Contribuyentes: Ale flashero, Bibliofilotranstornado, Carlosblh, Davidsevilla, Davius, GerWare, Gizmo II,Jarisleif, Jkbw, Juan Mayordomo, Juan-Pablo Contreras, Marsal20, NicoGrapsas, Pjhgwiki, Profeshermyguad, Raulshc, Rbonvall, Sabbut, Superzerocool, 64 ediciones anónimas
Conjetura de Goldbach Fuente: https://es.wikipedia.org/w/index.php?oldid=71879063 Contribuyentes: Amadís, Assdl, Bibliofilotranstornado, Boja, Cdani, DJ Nietzsche, Diogeneselcinico42,Emijrp, Erufailon, Farisori, FedericoFel, Ferejim, GermanX, Gizmo II, Halfdrag, Interwiki, Jaumejr, Javierito92, Jkbw, Jmvkrecords, Joseaperez, Josemiguelito, Juan Mayordomo, Leonudio,Lmendo, Matdrodes, Mcetina, Moriel, Mrbitman, Neodop, Paolo la barreg, Petronas, Quimicefa, Raulshc, Raúl González Molina, Rimac, Sabbut, Santyno, Sergiosh, SrSpock, SuperBraulio13,Tano4595, Titanico81, Xatufan, Yuiop, Zoid, 97 ediciones anónimas
Hipótesis de Lindelöf Fuente: https://es.wikipedia.org/w/index.php?oldid=68815388 Contribuyentes: Raulshc, Technopat
Hipótesis de Riemann Fuente: https://es.wikipedia.org/w/index.php?oldid=71576980 Contribuyentes: Ascánder, Billinghurst, Boninho, Brindys, Chewie, Davidsevilla, Diegazo, Egaida,Elisardojm, Erud, Fede Threepwood, GermanX, Icvav, Ingenioso Hidalgo, Ivn, Jamrb, JorgeGG, Joseaperez, Joselotl, Jtico, Juan Mayordomo, Mar del Sur, Mariano mario06, Marsal20, Mcetina,Pitufox27, Raulshc, Ricardogpn, Sabbut, Seraphita, Tano4595, The Exorcist, Vibria, Wricardoh, Zoid, Zulucho, 86 ediciones anónimas
Número de Giuga Fuente: https://es.wikipedia.org/w/index.php?oldid=68663003 Contribuyentes: 1969, Juan Mayordomo, Linda Algerini, Mercenario97, Nicop, Santiperez, 5 edicionesanónimas
Número cuasiperfecto Fuente: https://es.wikipedia.org/w/index.php?oldid=71605786 Contribuyentes: Markoszarrate
Problema de Galois inverso Fuente: https://es.wikipedia.org/w/index.php?oldid=64532061 Contribuyentes: JViejo, Juan Mayordomo, Raulshc, 1 ediciones anónimas
Problema del círculo de Gauss Fuente: https://es.wikipedia.org/w/index.php?oldid=69540105 Contribuyentes: Raulshc, 1 ediciones anónimas
Problemas de Hilbert Fuente: https://es.wikipedia.org/w/index.php?oldid=70947636 Contribuyentes: Alpertron, AnselmiJuan, Antón Francho, Cagliero, Deltasubk, Farisori, FedeBosio,Harysar, Heimy, Isha, JViejo, Joelcuervo, Juan Mayordomo, Lucien leGrey, Matdrodes, Miik Ezdanitofff, Toranks, UAwiki, Vivero, Wastingmytime, Yeza, 33 ediciones anónimas
Problemas de Smale Fuente: https://es.wikipedia.org/w/index.php?oldid=71508555 Contribuyentes: JacobRodrigues, Lucien leGrey, 13 ediciones anónimas
Problemas del milenio Fuente: https://es.wikipedia.org/w/index.php?oldid=71852126 Contribuyentes: Aanaya, Alakasam, Amire80, Baldaquino, Barri, Foundling, Gusama Romero, Jkbw,Lucien leGrey, Matdrodes, Netito777, Raulshc, Varano, 41 ediciones anónimas
Test de primalidad Fuente: https://es.wikipedia.org/w/index.php?oldid=71508268 Contribuyentes: 4lex, Alexav8, Alpertron, Andreas Naive, Armando-Martin, Ascánder, Avm, Carlos AlbertoCarcagno, Chuck es dios, Daniel JG, Dodo, Emijrp, Gusgus, HUB, Idleloop, JacobRodrigues, Johny65, Joseaperez, Juan Mayordomo, Kn, Leon-sotelo, Magister Mathematicae, Maldoror, Nakar,Numbo3, Odrio, Platonides, RGLago, Raulshc, RuidoBlanco, Sabbut, Sanbec, Sasquatch21, Tamorlan, Tano4595, Tico, Tostadora, Upiicsa, Varcolak vanth, Wewe, Yakoo, Zoid, 30 edicionesanónimas
Conjetura Fuente: https://es.wikipedia.org/w/index.php?oldid=70689223 Contribuyentes: Acratta, Antur, Açipni-Lovrij, Daniel JG, Davidsevilla, Egaida, Elwikipedista, Gerkijel, Humberto,JMCC1, Jkbw, JoshAcevedo, Llull, Miss Manzana, Pino, Rosarinagazo, Sabbut, SuperBraulio13, Tano4595, Tartaglia, Technopat, Unificacion, YISELA1999, 41 ediciones anónimas
Conjetura abc Fuente: https://es.wikipedia.org/w/index.php?oldid=68252227 Contribuyentes: Corso, Emijrp, Fonsi80, Jdelrio, Jerowiki, Juan Mayordomo, Marsal20, Nandoforpresident,Poc-oban, Raulshc, Waka Waka, 7 ediciones anónimas
Conjetura de Beal Fuente: https://es.wikipedia.org/w/index.php?oldid=70027359 Contribuyentes: Dani 343, Dreitmen, Javier marcelino TITO TITO, Jerowiki, Nelsonguerra994, Puntoinfinito,Raulshc, Shebaks, Sollet, Waka Waka, 24 ediciones anónimas
Conjetura de Artin sobre raíces primitivas Fuente: https://es.wikipedia.org/w/index.php?oldid=66330072 Contribuyentes: Raulshc
Conjetura de Fermat–Catalan Fuente: https://es.wikipedia.org/w/index.php?oldid=65058652 Contribuyentes: Raulshc
Conjetura de Hirsch Fuente: https://es.wikipedia.org/w/index.php?oldid=65058660 Contribuyentes: GermanX, Ricardogpn, 1 ediciones anónimas
Conjetura de Kepler Fuente: https://es.wikipedia.org/w/index.php?oldid=66024746 Contribuyentes: Castelo, HUB, JMCC1, Juan Marquez, Juan Mayordomo, Marsal20, Ricardogpn, Rosarino,Teide4, 4 ediciones anónimas
Conjetura de Ramanujan–Petersson Fuente: https://es.wikipedia.org/w/index.php?oldid=65058680 Contribuyentes: Ealmagro, Jerowiki, Marsal20, Raulshc, 1 ediciones anónimas
Fuentes y contribuyentes del artículo 229
Conjetura débil de Goldbach Fuente: https://es.wikipedia.org/w/index.php?oldid=70720090 Contribuyentes: DJ Nietzsche, Davidsevilla, GermanX, Hiperfelix, Ingenioso Hidalgo, Interwiki,Juan Mayordomo, Lobillo, Molinagaray, Moriel, Raulshc, Sabbut, Seasz, Txuspe, 29 ediciones anónimas
Hipótesis generalizada de Riemann Fuente: https://es.wikipedia.org/w/index.php?oldid=71561167 Contribuyentes: Carvas, Eloy, Raulshc, Rosarinagazo, Uruk, 3 ediciones anónimas
Hipótesis H de Schinzel Fuente: https://es.wikipedia.org/w/index.php?oldid=66063398 Contribuyentes: Locos epraix, Sabbut
Conjetura de Mertens Fuente: https://es.wikipedia.org/w/index.php?oldid=64494849 Contribuyentes: Raulshc, Ricardogpn, Sabbut, Tano4595
Número de Euclides Fuente: https://es.wikipedia.org/w/index.php?oldid=65197445 Contribuyentes: Bethan 182, Juan Mayordomo, Kondormari, Marsal20, Sabbut
Conjetura de Pólya Fuente: https://es.wikipedia.org/w/index.php?oldid=65058676 Contribuyentes: Bethan 182, FAR, Farisori, Sabbut, Soulreaper, 10 ediciones anónimas
Sucesión de Euclides-Mullin Fuente: https://es.wikipedia.org/w/index.php?oldid=64903529 Contribuyentes: Bethan 182, Juan Mayordomo, Marsal20, Raulshc, Sabbut
Cohomología de Čech Fuente: https://es.wikipedia.org/w/index.php?oldid=65015345 Contribuyentes: Emiduronte, Farisori, Raulshc, 1 ediciones anónimas
Cohomología Fuente: https://es.wikipedia.org/w/index.php?oldid=66167725 Contribuyentes: Juan Marquez, Magister Mathematicae, Uruk, 3 ediciones anónimas
Recubrimiento (matemática) Fuente: https://es.wikipedia.org/w/index.php?oldid=70336339 Contribuyentes: Domaniom, Fibonacci, Gato ocioso, HUB, Ingenioso Hidalgo, Javasava, Jerowiki,Julian Mendez, Luckas Blade, Molinagaray, Netzahualcoyotl, Tano4595, 4 ediciones anónimas
Espacio topológico Fuente: https://es.wikipedia.org/w/index.php?oldid=71706902 Contribuyentes: 6cR, Dodo, Dreitmen, Egaida, Elwikipedista, Farisori, Gato ocioso, GermanX, Ivn, Janus,Jerowiki, Joseangelmadrid, Joseaperez, Juan Mayordomo, Karv, Lauranrg, LeCire, Magister Mathematicae, Manwë, Moriel, Raulshc, Romero Schmidtke, Sabbut, Swazmo, Tamorlan, Usuwiki,Vivero, Xidane, 27 ediciones anónimas
Teorema fundamental de la geometría de Riemann Fuente: https://es.wikipedia.org/w/index.php?oldid=64543061 Contribuyentes: Alfredobi, Belgrano, DefLog, Digigalos, Farisori, JuanMayordomo, Lobillo, 1 ediciones anónimas
Tensor métrico Fuente: https://es.wikipedia.org/w/index.php?oldid=71516669 Contribuyentes: Abece, Davius, DefLog, Fmercury1980, Francisco J. de Anda, JacobRodrigues, Jcentel, Jerowiki,Jkbw, Juan Marquez, Leonpolanco, Nicoguaro, Urdangaray, Xhaju, 33 ediciones anónimas
Geometría de Riemann Fuente: https://es.wikipedia.org/w/index.php?oldid=64518351 Contribuyentes: Acratta, Alexav8, Altair Lemos, DefLog, Derki, Dodo, Götz, JMCC1, Jerowiki, Pabloab,Sarge Baldy, Shooke, Wewe, 8 ediciones anónimas
Variedad pseudoriemanniana Fuente: https://es.wikipedia.org/w/index.php?oldid=64597541 Contribuyentes: Davius, DefLog, Fernando Virra, Gato ocioso, GermanX, Joanlm, PabloGG,Segedano, 11 ediciones anónimas
Variedad de Riemann Fuente: https://es.wikipedia.org/w/index.php?oldid=70450811 Contribuyentes: Davius, DefLog, EduLeo, Elías, Jerowiki, Manufl, Pabloab, ReiVaX, Rigenea, Snakefang,Tzihue, Wewe, 6 ediciones anónimas
Álgebra de Lie Fuente: https://es.wikipedia.org/w/index.php?oldid=68872745 Contribuyentes: .José, Airunp, Alxromero, Ascánder, Caritdf, Cinabrium, Davius, DefLog, Drake 81, Edhardex,Farisori, Gato ocioso, GermanX, Götz, HUB, Hikoboshi, Joseaperez, Kismalac, Prtmrz, Rosarinagazo, Sabbut, Suisui, Tostadora, Walterpfeifer, 22 ediciones anónimas
Teorema fundamental Fuente: https://es.wikipedia.org/w/index.php?oldid=65825451 Contribuyentes: Caritdf, Farisori, Juan Mayordomo, Sabbut
Teorema fundamental de la aritmética Fuente: https://es.wikipedia.org/w/index.php?oldid=70110071 Contribuyentes: Alfredobi, Amoceann, Belgrano, Cyrax, DJ Nietzsche, Diegusjaimes,Dodo, Eduardosalg, Farisori, Fibonacci, Helmy oved, Igna, Ingenioso Hidalgo, Jamrb, Jasev, Jerowiki, Juan Mayordomo, Linkedark, Lizeth.garciar, P.o.l.o., RGLago, Raulshc, Sabbut, Sanbec,Technopat, Vivero, Weekloan, 39 ediciones anónimas
Teorema fundamental de la teoría de Galois Fuente: https://es.wikipedia.org/w/index.php?oldid=64543063 Contribuyentes: Akhram, Farisori, Heimy, Ivn, JViejo, Jorge C.Al, Juan Marquez,Juan Mayordomo, Matdrodes, Porao, Rovnet, 11 ediciones anónimas
Teorema fundamental de homomorfismos Fuente: https://es.wikipedia.org/w/index.php?oldid=70235681 Contribuyentes: Alephcero, Arkin, Caritdf, Davius, DefLog, Digigalos, Erud,Ezarate, Juan Mayordomo, Pino, RGLago, Vivero, Yrithinnd, 1 ediciones anónimas
Teorema fundamental del cálculo Fuente: https://es.wikipedia.org/w/index.php?oldid=71468582 Contribuyentes: 19jp87, Af3, Akma72, AlfonsoERomero, Alfredobi, Alpha Floor, Amizzau,Argoroth, Arielmusico, Axvolution, Bucephala, Camilo, Cinabrium, Damian cf, Diegusjaimes, Farisori, Faustito, Figempa 2a, Gafotas, Gengiskanhg, GermanX, Götz, HGuillen, Hanjin, Igna,Ilarrosa, JacobRodrigues, Jerowiki, Jkbw, JorgeGG, Juan Mayordomo, Kn, Leandroccl3, Log2x, Magister Mathematicae, Maldoror, Maleiva, Mandos, Marianov, Matdrodes, Mdiagom, Miguej,Moriel, Netito777, Pino, Pyr0, Pólux, Queninosta, R, RGLago, Rafa3040, Ruberyuka, Tano4595, Tirithel, Varano, Victorlj92, Vitamine, Wricardoh, Xgarciaf, Yeza, Yrithinnd, 257 edicionesanónimas
Teorema fundamental del álgebra Fuente: https://es.wikipedia.org/w/index.php?oldid=70329433 Contribuyentes: .Sergio, Acratta, Anstarpo3, Arapajoe, Ascánder, Bermudob, Cdomarchi,Davidsevilla, Davius, Diegusjaimes, Digigalos, Eli22, Farisori, GermanX, Ggenellina, Grillitus, Helmy oved, Humberto, Ialad, Ingenioso Hidalgo, Isha, JacoboCA, Jhnieto, Jkbw, JorgeGG,Joseaperez, Joselarrucea, Jtico, Juan Mayordomo, Luis Cortés Barbado, Markoszarrate, Marsal20, Moriel, Mpagano, Petronas, Raulshc, Revenga10V, Romero Schmidtke, Rovnet, Sabbut,Schummy, Sofia 0810, Soteke, SuperBraulio13, Sylfred1977, Tentenpie, Tomatejc, Youssefsan, 101 ediciones anónimas
Teoremas fundamentales de la economía del bienestar Fuente: https://es.wikipedia.org/w/index.php?oldid=70378933 Contribuyentes: Ahhrrc, Andreasmperu, Anual, Camilo, Denniss,Enrique Cordero, Espilas, Joanot Loblanc, Juan Mayordomo, Lnegro, Nihilo, Oscar ., Seneca1, Serpyke, 15 ediciones anónimas
Lema fundamental de teoría de cribas Fuente: https://es.wikipedia.org/w/index.php?oldid=68155787 Contribuyentes: Deltasubk, Farisori, Juan Mayordomo
Fuentes de imagen, Licencias y contribuyentes 230
Fuentes de imagen, Licencias y contribuyentesArchivo:Paul Halmos.jpeg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Paul_Halmos.jpeg Licencia: Public Domain Contribuyentes: Bastique, Bubba73, Common Good,Dbenbenn, Edelseider, Gene.arboit, Infrogmation, Kevyn, Kramer Associates, Mjrmtg, Romary, Semnoz, TwoWings, 1 ediciones anónimasArchivo:Spanish Wikiquote.SVG Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Spanish_Wikiquote.SVG Licencia: logo Contribuyentes: James.mcd.nzArchivo:SetUnion.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:SetUnion.svg Licencia: Creative Commons Zero Contribuyentes: kismalacArchivo:SetIntersection.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:SetIntersection.svg Licencia: Creative Commons Zero Contribuyentes: kismalacArchivo:SetDifferenceA.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:SetDifferenceA.svg Licencia: Creative Commons Zero Contribuyentes: kismalacArchivo:SetComplement.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:SetComplement.svg Licencia: Creative Commons Zero Contribuyentes: User:kismalacArchivo:SetSymmetricDifference.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:SetSymmetricDifference.svg Licencia: Creative Commons Zero Contribuyentes:User:kismalacArchivo:Commons-logo.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Commons-logo.svg Licencia: logo Contribuyentes: SVG version was created by User:Grunt andcleaned up by 3247, based on the earlier PNG version, created by Reidab.Image:Measure illustration.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Measure_illustration.png Licencia: Public Domain Contribuyentes: Oleg AlexandrovArchivo:Cantor base 3.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Cantor_base_3.svg Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes:User:MelchoirArchivo:Conjunto de Cantor.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Conjunto_de_Cantor.png Licencia: GNU Free Documentation License Contribuyentes: Albacar,Dodo, 1 ediciones anónimasArchivo:Cantors cube.jpg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Cantors_cube.jpg Licencia: Public Domain Contribuyentes: User:SolkollArchivo:Sierpinski carpet 6.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Sierpinski_carpet_6.png Licencia: Public Domain Contribuyentes: CRGreathouseArchivo:Menger sponge (IFS).jpg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Menger_sponge_(IFS).jpg Licencia: desconocido Contribuyentes: Avicennasis, D-Kuru, Sfan00IMG, Slashme, SolkollArchivo:Smith-Volterra set.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Smith-Volterra_set.png Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: Derlay, TcnukArchivo:Smith-Volterra-Cantor set.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Smith-Volterra-Cantor_set.svg Licencia: Public Domain Contribuyentes:User:InductivleoadArchivo:CantorFunction.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:CantorFunction.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:User:GarganFile:Cantor function sequence.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Cantor_function_sequence.png Licencia: Public Domain Contribuyentes: Amirki, Moloch981,1 ediciones anónimasArchivo:Portal.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Portal.svg Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: Portal.svg:Pepetps derivative work: Bitplane (talk)Archivo:Indicator function illustration.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Indicator_function_illustration.png Licencia: Public Domain Contribuyentes: OlegAlexandrovArchivo:Integral-area-under-curve.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Integral-area-under-curve.png Licencia: GNU Free Documentation License Contribuyentes: AnyFile, Grafite, TommyBee, VäskArchivo:RandLintegrals.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:RandLintegrals.png Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: Aaron Rotenberg, Darapti, DubheArchivo:Banach-Tarski Paradox.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Banach-Tarski_Paradox.svg Licencia: desconocido Contribuyentes: User:BdeshamArchivo:Máximos y mínimos.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Máximos_y_mínimos.svg Licencia: Public Domain Contribuyentes: DriniArchivo:sturmfunc1.jpg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Sturmfunc1.jpg Licencia: Creative Commons Attribution-Share Alike Contribuyentes: MizunoArchivo:sturmfunc2.jpg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Sturmfunc2.jpg Licencia: Creative Commons Attribution-Share Alike Contribuyentes: MizunoArchivo:Essential singularity.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Essential_singularity.png Licencia: GNU Free Documentation License Contribuyentes: FunctorSaladImagen:Gauss-Bonnet theorem.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Gauss-Bonnet_theorem.svg Licencia: Public Domain Contribuyentes: Wladik DereviankoArchivo:Mercator-proj.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Mercator-proj.png Licencia: GNU Free Documentation License Contribuyentes: Modified by JecowaArchivo:helicatenoid.gif Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Helicatenoid.gif Licencia: Public Domain Contribuyentes: Original uploader was Wickerprints aten.wikipediaArchivo:Complexity classes es.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Complexity_classes_es.svg Licencia: GNU Free Documentation License Contribuyentes: Mdd,NeverDoING, Paintman, 1 ediciones anónimasImage:BSD data plot for elliptic curve 800h1.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:BSD_data_plot_for_elliptic_curve_800h1.svg Licencia: Creative CommonsAttribution-Sharealike 3.0 Contribuyentes: RobHarArchivo:3n1 diagrama.gif Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:3n1_diagrama.gif Licencia: Public Domain Contribuyentes: PjhgwikiArchivo:3n1 cota superior.gif Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:3n1_cota_superior.gif Licencia: Free Art License Contribuyentes: PJHGWIKIArchivo:Goldbach-1000000.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Goldbach-1000000.png Licencia: GNU Free Documentation License Contribuyentes: Originaluploader was Reddish at en.wikipediaArchivo:Criticalline.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Criticalline.png Licencia: Creative Commons Attribution-Sharealike 2.5 Contribuyentes: Anarkman,Darapti, Kilom691, Maksim, SlonzorArchivo:Zeta polar.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Zeta_polar.svg Licencia: GNU Free Documentation License Contribuyentes: Original artwork created byLinas Vepstas <[email protected]> User:Linas New smooth and precise plotcurve version by User:Geek3Archivo:Riemann zeta function absolute value.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Riemann_zeta_function_absolute_value.png Licencia: Creative CommonsAttribution-ShareAlike 3.0 Unported Contribuyentes: Conscious, Kilom691Imagen:Question.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Question.png Licencia: GNU Free Documentation License Contribuyentes: It Is Me Here, Rex, 1 edicionesanónimasImagen:Mersene39.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Mersene39.png Licencia: Public Domain Contribuyentes: RGLago, 1 ediciones anónimasArchivo:Topological space examples.svg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Topological_space_examples.svg Licencia: Public Domain Contribuyentes: DcoetzeeArchivo:topología abierto 1.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Topología_abierto_1.png Licencia: GNU Free Documentation License Contribuyentes:es:Usuario:Romero SchmidtkeArchivo:Interacción de la gravedad.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Interacción_de_la_gravedad.png Licencia: GNU Free Documentation License Contribuyentes: Original uploader was Luis María Benítez at es.wikipedia Later versions were uploaded by Joaquin Bermudez at es.wikipedia.Archivo:Saddle pt.jpg Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Saddle_pt.jpg Licencia: Public Domain Contribuyentes: User:StuRatFile:Teorema fundamental de homomorfismos diagrama conmutativo.svg Fuente:https://es.wikipedia.org/w/index.php?title=Archivo:Teorema_fundamental_de_homomorfismos_diagrama_conmutativo.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: User:ArkinArchivo:FTC geometric.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:FTC_geometric.png Licencia: Public domain Contribuyentes: Magog the Ogre, Mdiagom, Nandhp

Fuentes de imagen, Licencias y contribuyentes 231
Archivo:Edgeworth box.png Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:Edgeworth_box.png Licencia: Creative Commons Attribution-Sharealike 3.0,2.5,2.0,1.0 Contribuyentes: Cyrflo2000Archivo:WikiAbb5 1.JPG Fuente: https://es.wikipedia.org/w/index.php?title=Archivo:WikiAbb5_1.JPG Licencia: Creative Commons Attribution-Sharealike 3.0,2.5,2.0,1.0 Contribuyentes:Misterrabe

Licencia 232
LicenciaCreative Commons Attribution-Share Alike 3.0//creativecommons.org/licenses/by-sa/3.0/