
VGS VDS V - Oregon State...
5
Click here to load reader
Transcript of VGS VDS V - Oregon State...

3.
a. VGS = 2.5V and VDS = 2.5V , therefore saturation.
ID =k
′
2
W
L(VGS − VT )2(1 + λVDS)
=115x10−6
2(2.5− 0.43)2(1 + 0.06 · 2.5)
= 283.3µA
VGS = −0.5V and VDS = −1.25V , therefore saturation (again).
ID =k
′
2
W
L(VGS − VT )2(1 + λVDS)
=30x10−6
2(0.5− 0.6)2(1 + 0.1 · 1.25)
= 0.17µA
b. VGS = 3.3V and VDS = 2.2V , therefore linear/triode.
ID = k′W
L
((VGS − VT )VDS −
V 2DS
2
)= 115x10−6
((3.3− 0.43)2.2− 2.22
2
)= 447.8µA
VGS = −2.5V and VDS = −1.8V , therefore linear/triode (again).
ID = k′W
L
((VGS − VT )VDS −
V 2DS
2
)= 30x10−6
((2.5− 0.4)1.8− 1.82
2
)= 64.8µA
c. VGS = 0.6V and VDS = 0.1V , therefore linear/triode.
ID = k′W
L
((VGS − VT )VDS −
V 2DS
2
)= 115x10−6
((0.6− 0.63)0.1− 0.12
2
)= 1.38µA
VGS = −2.5V and VDS = −0.7V , therefore linear/triode (again).
ID = k′W
L
((VGS − VT )VDS −
V 2DS
2
)= 30x10−6
((2.5− 0.4)0.7− 0.72
2
)= 36.75µA
1

6. For a short channel device,
ID = k′W
L
[(VGS − VT )Vmin −
V 2min
2
](1 + λVDS)
Vmin = min [(VGS − VT ), VDS , VDSAT ]
To begin with, the operating regions need to be determined.For any of these data to be in saturation, VT should be:
VGS − VT < VDSAT
2− VT < 0.6
⇓VT > 1.4V
This is quite a high value in our process, thus we can assume that all data are taken in velocity saturation.We will check this assumption later.In velocity saturation:
ID = k′W
L
[(VGS − VT )VDSAT −
V 2DSAT
2
](1 + λVDS)
Using rows 1 and 2 from the table we get:
1812 = k′W
L
[(2.5− VT0) 0.6− 0.62
2
](1 + λ1.8)
1297 = k′W
L
[(2− VT0) 0.6− 0.62
2
](1 + λ1.8)
⇓VT0 = 0.44V
Note that VT0 < 1.4V and therefore 1, 2 and 3 are in velocity saturation. Now, using rows 2 and 3:
1297
1361=
1 + λ1.8
1 + λ2.5⇓
λ = 0.08V −1
Now using rows 2 and 4:VT = 0.587V
and using rows 2 and 5:VT = 0.691V
Both of these values are less than 1.4V, so all the data in our table were taken in velocity saturation.
VT = TT0 + γ
(√|Vsg|+ |2φp| −
√2|φf |
)The two values of VT we found previously, and knowing that VT0 = 0.44V , we can nd:
|2φf | = 0.6V
γ = 0.3V12
Now we can substitute in data and nd:W
L= 15
2

9.
a. Device is always in saturation.
−VXR
=k
′
p
2
W
L(VX − |Vtp|)2
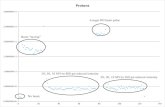
b. This is an approximate graph.
Figure 1: Load lines for M1.
c.
1V
20kΩ=
30x10−6
2
W
L× (1.5− 0.4)
2
50µA = 1.5x10−6W
L× 1.21
2.755 =W
L⇓
W ≈ 0.69µm
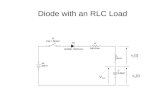
d. Voltage at Node X would go up since the current drive of PMOS is lower.
Figure 2: Load lines with M1 velocity saturated.
3

13.
Vin = 0.2⇒ IDS = 3x10−8A (1)
or
Vin = 0.2⇒ IDS = 5x10−9A (2)
∆t = C∆V
I
∆t(1) = 1pF × 1
3x10−8
= 33.3µs
∆t(2) = 1pF × 1
5x10−9
= 200µs
17.
Cox = 6fF
µm2
LD = 0.5µm
WD = 1µm
Cg is dened by the following relationships:
cut− off CoxWL+ 2CoW
linear CoxWL+ 2CoW
saturation2
3CoxWL+ 2CoW
Diusion capacitance, Cd, is given by:
Cd = CjLDWD + Cjsw(2LD +WD)
Cj =Cjo
(1 + VDS
φ )mj
Cjsw =Cjswo
(1 + VDS
φ )mjsw
a. Vin = 2.5V , Vout = 2.5V . Velocity saturation.
Cg = 1.62fF
Q = 4.05fC = 4.05x10−15C
Cd = 0.827fF
Vin = 2.5V , Vout = 0.5V . Linear region.
Cg = 2.12fF
Q = 5.3fC = 5.3x10−15C
Cd = 1.263fF
Vin = 2.5V , Vout = 0V . Linear region.
Cg = 2.12fF
Q = 5.3fC = 5.3x10−15C
Cd = 1.56fF
4

b. Vin = 0⇒ Cutt off
Cg = GoxWL
= 2.12pF
Q = 0
Cd are the same as they were in part a.
22.
a.
s =0.25
0.1= 2.5
Speed scales inversely to tp which scales as 1s2 therefore speed scale with s2 so:
f = 625MHz
Power scales with αs⇒ P = 25W .
b. In full scaling, speed scales with:f = 250MHz
Power scales as 1s2 and thus:
P = 1.6W
c. We want to keep power constant:
s
u3= 1⇒ u = s
13 = (2.5)
13 = 1.36
Voltage becomes V = 1.842V , speed scales as s2
u = 4.6 so:
f = 460MHz
5
![Exercise 5–1 Ex: 5.1 Similarly, V 1 V results in ...ece.gmu.edu/~qli/ECE333/Chapter 05 ISM.pdfSEDRA-ISM: “E-CH05 ... = 1.23 V Ex: 5.17 v DSmin = v GS +|V t| ... × 2[1 −( )]2](https://static.fdocument.org/doc/165x107/5adf970e7f8b9a1c248c32ec/exercise-51-ex-51-similarly-v-1-v-results-in-ecegmueduqliece333chapter.jpg)









![Ç o v^ ] } v · î ô &ODVV](https://static.fdocument.org/doc/165x107/621c22aaeca1c872404f6486/-o-v-v-ampodvv.jpg)



