The Fundamentals of Modal Testing
56
The Fundamentals of Modal Testing Application Note 243 - 3 Η(ϖ29 = Σ n r=1 φ φ i j /m ( n - ) + (2 n ) ϖ ϖ ξϖϖ 2 22 2
-
Upload
asier-tejada-osegui -
Category
Documents
-
view
210 -
download
1
Transcript of The Fundamentals of Modal Testing

The Fundamentals ofModal Testing
Application Note 243 - 3
Η(ω) = Σn
r = 1
φ φi j /m
( n - ) + (2 n)ω ω ξωω2 2 2 2

2
Modal analysis is defined as the studyof the dynamic characteristics of amechanical structure. This applica-tion note emphasizes experimentalmodal techniques, specifically themethod known as frequency responsefunction testing. Other areas aretreated in a general sense to intro-duce their elementary concepts and relationships to one another.
Although modal techniques are math-ematical in nature, the discussion isinclined toward practical application.Theory is presented as needed toenhance the logical development ofideas. The reader will gain a soundphysical understanding of modalanalysis and be able to carry out an effective modal survey with confidence.
Chapter 1 provides a brief overviewof structural dynamics theory.Chapter 2 and 3 which is the bulk of the note – describes the measure-ment process for acquiring frequencyresponse data. Chapter 4 describesthe parameter estimation methods for extracting modal properties.Chapter 5 provides an overview of analytical techniques of structuralanalysis and their relation to experimental modal testing.
Preface

3
Preface 2
Chapter 1 — Structural Dynamics Background 4
Introduction 4
Structural Dynamics of a Single Degree of Freedom (SDOF) System 5
Presentation and Characteristics of Frequency Response Functions 6
Structural Dynamics for a Multiple Degree of Freedom (MDOF) System 9
Damping Mechanism and Damping Model 11
Frequency Response Function and Transfer Function Relationship 12
System Assumptions 13
Chapter 2 — Frequency Response Measurements 14
Introduction 14
General Test System Configurations 15
Supporting the Structure 16
Exciting the Structure 18
Shaker Testing 19
Impact Testing 22
Transduction 25
Measurement Interpretation 29
Chapter 3 — Improving Measurement Accuracy 30
Measurement Averaging 30
Windowing Time Data 31
Increasing Measurement Resolution 32
Complete Survey 34
Chapter 4 — Modal Parameter Estimation 38
Introduction 38
Modal Parameters 39
Curve Fitting Methods 40
Single Mode Methods 41
Concept of Residual Terms 43
Multiple Mode-Methods 45
Concept of Real and Complex Modes 47
Chapter 5 — Structural Analysis Methods 48
Introduction 48
Structural Modification 49
Finite Element Correlation 50
Substructure Coupling Analysis 52
Forced Response Simulation 53
Bibliography 54
Table of Contents

4
Introduction
A basic understanding of structuraldynamics is necessary for successfulmodal testing. Specifically, it isimportant to have a good grasp of therelationships between frequencyresponse functions and their individ-ual modal parameters illustrated inFigure 1.1. This understanding is ofvalue in both the measurement andanalysis phases of the survey. Know-ing the various forms and trends offrequency response functions willlead to more accuracy during themeasurement phase. During theanalysis phase, knowing how equa-tions relate to frequency responsesleads to more accurate estimation ofmodal parameters.
The basic equations and their variousforms will be presented conceptuallyto give insight into the relationshipsbetween the dynamic characteristicsof the structure and the correspond-ing frequency response function measurements. Although practical systems are multiple degree of free-dom (MDOF) and have some degreeof nonlinearity, they can generally be represented as a superposition of single degree of freedom (SDOF) linear models and will be developedin this manner.
First, the basics of an SDOF lineardynamic system are presented to gaininsight into the single mode conceptsthat are the basis of some parameter estimation techniques. Second, thepresentation and properties of vari-ous forms of the frequency responsefunction are examined to understand
the trends and their usefulness in themeasurement process. Finally, theseconcepts are extended into MDOFsystems, since this is the type ofbehavior most physical structuresexhibit. Also, useful concepts associated with damping mechanismsand linear system assumptions are discussed.
Figure 1.1Phases of a modal test
Test Structure
Frequency Response Measurements
Modal Parameters
Curve Fit Representation
Η (ω) = Σijn
r = 1
φ φir jrmr ( r - + j2 r)ω ω ζωω2 2
ωζφ
— Frequency— Damping
{ } — Mode Shape
Chapter 1Structural Dynamics Background

5
Structural Dynamics of a SingleDegree of Freedom (SDOF) System
Although most physical structures arecontinuous, their behavior can usual-ly be represented by a discreteparameter model as illustrated inFigure 1.2. The idealized elements are called mass, spring, damper andexcitation. The first three elementsdescribe the physical system. Energyis stored by the system in the massand the spring in the form of kineticand potential energy, respectively. Energy enters the system through excitation and is dissipated throughdamping.
The idealized elements of the physi-cal system can be described by theequation of motion shown in Figure1.3. This equation relates the effectsof the mass, stiffness and damping ina way that leads to the calculation ofnatural frequency and damping factorof the system. This computation isoften facilitated by the use of the def-initions shown in Figure 1.3 that leaddirectly to the natural frequency anddamping factor.
The natural frequency, ω, is in unitsof radians per second (rad/s). Thetypical units displayed on a digitalsignal analyzer, however, are in Hertz(Hz). The damping factor can also berepresented as a percent of criticaldamping – the damping level at whichthe system experiences no oscillation.This is the more common understand-ing of modal damping. Although thereare three distinct damping cases, only the underdamped case (ζ< 1) is important for structural dynamicsapplications.
Figure 1.2SDOF discreteparameter model
Figure 1.3Equation of motion — modal definitions
Figure 1.4Complex roots of SDOF equation
Figure 1.5SDOF impulse response/free decay
Spring k
ResponseDisplacement (x) Mass m
Damper c
ExcitationForce (f)
mx + cx + kx = f(t).. .
ω2n = ,k
m2 n =ζω c
mor =ζ c
2km
s = - + j d1,2 σ ω
σωζ
— Damping Rate— Damped Natural Frequency
e- tσ
ωd

6
When there is no excitation, the rootsof the equation are as shown inFigure 1.4. Each root has two parts:the real part or decay rate, whichdefines damping in the system andthe imaginary part, or oscillatory rate, which defines the damped natural frequency, wd. This free vibration response is illustrated in Figure 1.5.
When excitation is applied, the equa-tion of motion leads to the frequencyresponse of the system. The frequen-cy response is a complex quantityand contains both real and imaginaryparts (rectangular coordinates). It canbe presented in polar coordinates asmagnitude and phase, as well.
Presentation and Characteristics of Frequency Response Functions
Because it is a complex quantity, thefrequency response function cannotbe fully displayed on a single two-dimensional plot. It can, however, bepresented in several formats, each ofwhich has its own uses. Although the response variable for the previousdiscussion was displacement, it couldalso be velocity or acceleration.Acceleration is currently the acceptedmethod of measuring modalresponse.
One method of presenting the data is to plot the polar coordinates, mag-nitude and phase versus frequency as illustrated in Figure 1.6. At reso-nance, when ω = ωn, the magnitude is a maximum and is limited only bythe amount of damping in the system.The phase ranges from 0° to 180° and the response lags the input by 90° at resonance.
Figure 1.6Frequency response —polar coordinates
Mag
nitu
dePh
ase
ωd
ωd
H( ) =ω
θ ω( ) = tan-1
1/m
( n- ) + (2 n)ω ω ζωω2 2 2 2
2 n
n-
ξωω
ω ω2 2

7
Another method of presenting the data is to plot the rectangular coordinates, the real part and theimaginary part versus frequency. For a proportionally damped system,the imaginary part is maximum at resonance and the real part is 0, asshown in Figure 1.7.
A third method of presenting the frequency response is to plot the realpart versus the imaginary part. This isoften called a Nyquist plot or a vectorresponse plot. This display empha-sizes the area of frequency responseat resonance and traces out a circle,as shown in Figure 1.8.
By plotting the magnitude in decibelsvs logarithmic (log) frequency, it ispossible to cover a wider frequencyrange and conveniently display therange of amplitude. This type of plot, often known as a Bode plot, also has some useful parameter character-istics which are described in the following plots.
When ω << ωn the frequencyresponse is approximately equal tothe asymptote shown in Figure 1.9.This asymptote is called the stiffnessline and has a slope of 0, 1 or 2 fordisplacement, velocity and accelera-tion responses, respectively. When ω >> ωn the frequency response isapproximately equal to the asymptotealso shown in Figure 1.9. This asymp-tote is called the mass line and has aslope of -2, -1 or 0 for displacementvelocity or acceleration responses, respectively.
Figure 1.7Frequency response — rectangular coordinates
Figure 1.8Nyquist plot of frequency response
Real
Imag
inar
y
H( ) =ω -2 n
( n- ) + (2 n)
ξωω
ω ω ζωω2 2 2 2
H( ) =ω ω ω
ω ω ζωω
2 2
2 2 2 2
n -
( n- ) + (2 n)
θ ω( )
H( )ω

8
The various forms of frequency response function based on the type of response variable are alsodefined from a mechanical engineer-ing viewpoint. They are somewhatintuitive and do not necessarily corre-spond to electrical analogies. Theseforms are summarized in Table 1.1.
Figure 1.9Different forms of frequency response
Table 1.1Different forms of frequency response
Definition Response Variable
Compliance X DisplacementF Force
Mobility V VelocityF Force
Accelerance A AccelerationF Force
Disp
lace
men
tAc
cele
ratio
nVe
loci
tyFrequency
Frequency
Frequency
1k
ω2
k
ωk
1mω2
1m
1mω
≈
≈
≈
≈
≈ −
≈

9
Structural Dynamics for a MultipleDegree of Freedom (MDOF) System
The extension of SDOF concepts to a more general MDOF system, with n degrees of freedom, is a straightfor-ward process. The physical system issimply comprised of an interconnec-tion of idealized SDOF models, as illustrated in Figure 1.10, and is described by the matrix equations of motion as illustrated in Figure 1.11.
The solution of the equation with noexcitation again leads to the modalparameters (roots of the equation) of the system. For the MDOF case,however, a unique displacement vector called the mode shape existsfor each distinct frequency and damp-ing as illustrated in Figure 1.11. Thefree vibration response is illustratedin Figure 1.12.
The equations of motion for theforced vibration case also lead to frequency response of the system. It can be written as a weighted summation of SDOF systems shownin Figure 1.13.
The weighting, often called the modalparticipation factor, is a function ofexcitation and mode shape coeffi-cients at the input and output degreesof freedom.
Figure 1.10MDOF discrete parameter model
Figure 1.11Equations ofmotion — modal definitions
Figure 1.12MDOF impulseresponse/free decay
k1
k3
k2
k4
c1
c3
c2
c4
m1 m2
m3
[m]{x} + [c]{x} + [k]{x} = {f(t)}
{ }r , r = 1, n modesφ
.. .
Ampl
itude
0.0 Sec 6.0

10
The participation factor identifies theamount each mode contributes to thetotal response at a particular point.An example with 3 degrees of free-dom showing the individual modalcontributions is shown in Figure 1.14.
The frequency response of an MDOFsystem can be presented in the sameforms as the SDOF case. There areother definitional forms and proper-ties of frequency response functions,such as a driving point measurement,that are presented in the next chap-ter. These are related to specific locations of frequency response measurements and are introducedwhen appropriate.
Figure 1.13MDOF frequency response
Figure 1.14SDOF modal contributions
dB M
agni
tude
0.0ω1 ω2 ω3 Frequency
Η(ω) = Σn
r = 1
φ φi j /m
( n - ) + (2 n)ω ω ξωω2 2 2 2
dB M
agni
tude
0.0ω1 ω2 ω3 Frequency
Mode 1
Mode 2Mode 3

11
Damping Mechanism and Damping Model
Damping exists in all vibratory systems whenever there is energy dissipation. This is true for mechani-cal structures even though most areinherently lightly damped. For freevibration, the loss of energy fromdamping in the system results in thedecay of the amplitude of motion. In forced vibration, loss of energy isbalanced by the energy supplied byexcitation. In either situation, theeffect of damping is to remove energyfrom the system.
In previous mathematical formula-tions the damping force was calledviscous, since it was proportional tovelocity. However, this does notimply that the physical dampingmechanism is viscous in nature. It issimply a modeling method and it isimportant to note that the physicaldamping mechanism and the mathe-matical model of that mechanism aretwo distinctly different concepts.
Most structures exhibit one or moreforms of damping mechanisms, suchas coulomb or structural, whichresult from looseness of joints, inter-nal strain and other complex causes.However, these mechanisms can bemodeled by an equivalent viscousdamping component. It can beshown that only the viscous compo-nent actually accounts for energy lossfrom the system and the remainingportion of the damping is due to non-linearities that do not cause energydissipation. Therefore, only the viscous term needs to be measured tocharacterize the system when using alinear model.
The equivalent viscous damping coefficient is obtained from energyconsiderations as illustrated in the
hysteresis loop in Figure 1.15. E isthe energy dissipated per cycle ofvibration, ceq is the equivalent vis-cous damping coefficient and X is theamplitude of vibration. Note that thecriteria for equivalence are equalenergy distribution per cycle and thesame relative amplitude.
Figure 1.15Viscous dampingenergy dissipation
Figure 1.16System block diagram
Figure 1.17Definition of transfer function
x
X∆ πωE = ceq X2
Force vs Displacement
cx.
InputExcitation
System
OutputResponseG(s)
Transfer Function =
G(s) =
OutputInput
Y(s)X(s)

12
Frequency Response Function andTransfer Function Relationship
The transfer function is a mathemati-cal model defining the input-outputrelationship of a physical system.Figure 1.16 shows a block diagram of a single input-output system.System response (output) is causedby system excitation (input). Thecasual relationship is loosely definedas shown in Figure 1.17. Mathemati-cally, the transfer function is definedas the Laplace transform of the out-put divided by the Laplace transformof the input.
The frequency response function isdefined in a similar manner and isrelated to the transfer function.Mathematically, the frequencyresponse function is defined as theFourier transform of the output divid-ed by the Fourier transform of theinput. These terms are often usedinterchangeably and are occasionallya source of confusion.
This relationship can be furtherexplained by the modal test process.The measurements taken during amodal test are frequency responsefunction measurements. The parame-ter estimation routines are, in gener-al, curve fits in the Laplace domainand result in the transfer functions.The curve fit simply infers the loca-tion of system poles in the s-planefrom the frequency response func-tions as illustrated in Figure 1.18. Thefrequency response is simply thetransfer function measured along thejω axis as illustrated in Figure 1.19.
Figure 1.18S-plane representation
iω
ωn
s-plane
ωd
σσ

13
System Assumptions
The structural dynamics backgroundtheory and the modal parameter estimation theory are based on twomajor assumptions:
Figure 1.193-D Laplace representation
Real Part
Imaginary Part
Magnitude
Phase
σ
σ
σ
σ
jω
jω
jω
Transfer Function – surfaceFrequency Response – dashed
● The system is linear.● The system is stationary.
There are, of course, a number ofother system assumptions such asobservability, stability, and physicalrealizability. However, these assump-tions tend to be addressed in theinherent properties of mechanicalsystems. As such, they do not pres-ent practical limitations when makingfrequency response measurements asdo the assumptions of linearity and stationarity.

14
Introduction
This chapter investigates the currentinstrumentation and techniquesavailable for acquiring frequencyresponse measurements. The discus-sion begins with the use of a dynamicsignal analyzer and associated periph-erals for making these measurements.The type of modal testing known asthe frequency response functionmethod, which measures the inputexcitation and output response simul-taneously, as shown in the block dia-gram in Figure 2.1, is examined. Thefocus is on the use of one input force,a technique commonly known as sin-gle-point excitation, illustrated in Figure 2.2. By understanding thistechnique, it is easy to expand to themultiple input technique.
With a dynamic signal analyzer, which is a Fourier transform-basedinstrument, many types of excitationsources can be implemented to meas-ure a structure’s frequency responsefunction. In fact, virtually any physi-cally realizable signal can be input or measured. The selection and implementation of the more commonand useful types of signals for modaltesting are discussed.
Transducer selection and mountingmethods for measuring these signalsalong with system calibration meth-
ods, are also included. Techniquesfor improving the quality and accuracy of measurements are thenexplored. These include processessuch as averaging, windowing andzooming, all of which reduce mea-surement errors. Finally, a section on measurement interpretation is included to aid in understanding thecomplete measurement process.
Chapter 2Frequency Response Measurements
Figure 2.1System block diagram
Figure 2.2Structure under test
Excitation ResponseH( )ωX( )ω Y( )ω
Structure
Force Transducer
Shaker

15
General Test System Configurations
The basic test setup required for making frequency response measure-ments depends on a few major factors. These include the type ofstructure to be tested and the level of results desired. Other factors,including the support fixture and the excitation mechanism, also affectthe amount of hardware needed toperform the test. Figure 2.3 shows a diagram of a basic test system configuration.
The heart of the test system is thecontroller, or computer, which is theoperator’s communication link to theanalyzer. It can be configured withvarious levels of memory, displaysand data storage. The modal analysis software usually resides here, as wellas any additional analysis capabilitiessuch as structural modification andforced response.
The analyzer provides the data acquisition and signal processing operations. It can be configured withseveral input channels, for force andresponse measurements, and withone or more excitation sources fordriving shakers. Measurement func-tions such as windowing, averagingand Fast Fourier Transforms (FFT)computation are usually processedwithin the analyzer.
For making measurements on simplestructures, the exciter mechanismcan be as basic as an instrumentedhammer. This mechanism requires a minimum amount of hardware. An electrodynamic shaker may beneeded for exciting more complicatedstructures. This shaker system re-quires a signal source, a power ampli-fier and an attachment device. Thesignal source, as mentioned earlier,may be a component of the analyzer.
Transducers, along with a power supply for signal conditioning, areused to measure the desired forceand responses. The piezoelectrictypes, which measure force andacceleration, are the most widelyused for modal testing. The powersupply for signal conditioning may bevoltage or charge mode and is some-times provided as a component of theanalyzer, so care should be taken insetting up and matching this part ofthe test system.
Figure 2.3General test configuration
Structure
Transducers
Exciter
Controller
Analyzer

16
Supporting The Structure
The first step in setting up a structure for frequency responsemeasurements is to consider the fix-turing mechanism necessary to obtainthe desired constraints (boundaryconditions). This is a key step in theprocess as it affects the overall struc-tural characteristics, particularly forsubsequent analyses such as structur-al modification, finite element corre-lation and substructure coupling.
Analytically, boundary conditions can be specified in a completely freeor completely constrained sense. Intesting practice, however, it is gener-ally not possible to fully achievethese conditions. The free conditionmeans that the structure is, in effect,floating in space with no attachmentsto ground and exhibits rigid body behavior at zero frequency. The airplane shown in Figure 2.4a is anexample of this free condition.Physically, this is not realizable, so the structure must be supported in some manner. The constrainedcondition implies that the motion,(displacements/rotations) is set tozero. However, in reality most struc-tures exhibit some degree of flexibili-ty at the grounded connections. Thesatellite dish in Figure 2.4b is an example of this condition.
In order to approximate the free sys-tem, the structure can be suspendedfrom very soft elastic cords or placedon a very soft cushion. By doing this,the structure will be constrained to a degree and the rigid body modeswill no longer have zero frequency.However, if a sufficiently soft support
system is used, the rigid body fre-quencies will be much lower than thefrequencies of the flexible modes andthus have negligible effect. The rule of thumb for free supports is that thehighest rigid body mode frequencymust be less than one tenth that ofthe first flexible mode. If this criteri-on is met, rigid body modes will have negligible effect on flexible modes.Figure 2.5 shows a typical frequencyresponse measurement of this typewith nonzero rigid body modes.
The implementation of a constrainedsystem is much more difficult toachieve in a test environment. Tobegin with, the base to which thestructure is attached will tend to havesome motion of its own. Therefore, itis not going to be purely grounded.Also, the attachment points will havesome degree of flexibility due to thebolted, riveted or welded connec-tions. One possible remedy for theseproblems is to measure the frequency
Figure 2.4aExample of free support situation
Figure 2.4bExample of constrained support situation
FreeBoundary
ConstrainedBoundary

17
response of the base at the attach-ment points over the frequency rangeof interest. Then, verify that thisresponse is significantly lower thanthe corresponding response of thestructure, in which case it will have a negligible effect. However, the frequency response may not be mea-surable, but can still influence thetest results.
There is not a best practical or appropriate method for supporting a structure for frequency responsetesting. Each situation has its owncharacteristics. From a practicalstandpoint, it would not be feasible to support a large factory machineweighing several tons in a free teststate. On the other hand, there maybe no convenient way to ground avery small, lightweight device for theconstrained test state. A situationcould occur, with a satellite for exam-ple, where the results of both testsare desired. The free test is requiredto analyze the satellite’s operatingenvironment in space. However, theconstrained test is also needed toassess the launch environmentattached to the boost vehicle.Another reason for choosing theappropriate boundary conditions isfor finite element model correlationor substructure coupling analyses. Atany rate, it is certainly important dur-ing this phase of the test to ascertainall the conditions in which the resultsmay be used.
Figure 2.5Frequency response of freely suspended system
Hz 1.5625kFxdXY 0
-30.0
dB
10.0/Div
50.0
FREQ RESP
Rigid Body Mode
1st Flexible Mode

Table 2.1Excitation functions
18
Exciting the Structure
The next step in the measurementprocess involves selecting an excitation function (e.g., randomnoise) along with an excitation sys-tem (e.g., a shaker) that best suits theapplication. The choice of excitationcan make the difference between agood measurement and a poor one.Excitation selection should beapproached from both the type offunction desired and the type of exci-tation system available because theyare interrelated. The excitation func-tion is the mathematical signal usedfor the input. The excitation systemis the physical mechanism used toprove the signal. Generally, thechoice of the excitation function dictates the choice of the excitationsystem, a true random or burst
random function requires a shakersystem for implementation. In gener-al, the reverse is also true. Choosinga hammer for the excitation systemdictates an impulsive type excitation function.
Excitation functions fall into fourgeneral categories: steady-state, random, periodic and transient.There are several papers that go intogreat detail examining the applica-tions of the most common excitationfunctions. Table 2.1 summarizes thebasic characteristics of the ones thatare most useful for modal testing.True random, burst random and impulse types are considered in thecontext of this note since they are themost widely implemented. The bestchoice of excitation function dependson several factors: available signal
processing equipment, characteristicsof the structure, general measure-ment considerations and, of course,the excitation system.
A full function dynamic signal analyz-er will have a signal source with asufficient number of functions forexciting the structure. With lowerquality analyzers, it may be necessaryto obtain a signal source as a sepa-rate part of the signal processingequipment. These sources often provide fixed sine and true randomfunctions as signals; however, thesemay not be acceptable in applicationswhere high levels of accuracy aredesired. The types of functions available have a significant influenceon measurement quality.
Periodic* Transientin analyzer window in analyzer window
Sine True Pseudo Random Fast Impact Burst Burststeady random random sine sine randomstate
Minimze leakage No No Yes Yes Yes Yes Yes YesSignal to noise Very Fair Fair Fair High Low High Fair
highRMS to peak ratio High Fair Fair Fair High Low High FairTest measurement time Very Good Very Fair Fair Very Very Very
long good good good goodControlled frequency content Yes Yes* Yes* Yes* Yes* No Yes* Yes*Controlled amplitude content Yes No Yes* No Yes* No Yes* NoRemoves distortion No Yes No Yes No No No YesCharacterize nonlinearity Yes No No No Yes No Yes No
* Requires additional equipment or special hardware

19
The dynamics of the structure are also important in choosing the excitation function. The level of nonlinearities can be measured andcharacterized effectively with sinesweeps or chirps, but a random func-tion may be needed to estimate thebest linearized model of a nonlinearsystem. The amount of damping andthe density of the modes within thestructure can also dictate the use ofspecific excitation functions. Ifmodes are closely coupled and/orlightly damped, an excitation functionthat can be implemented in a leakage-free manner (burst random for exam-ple) is usually the most appropriate.
Excitation mechanisms fall into fourcategories: shaker, impactor, steprelaxation and self-operating. Steprelaxation involves preloading thestructure with a measured forcethrough a cable then releasing the
cable and measuring the transients.Self-operating involves exciting thestructure through an actual operatingload. This input cannot be measuredin many cases, thus limiting its useful-ness. Shakers and impactors are themost common and are discussed inmore detail in the following sections.Another method of excitation mecha-nism classification is to divide theminto attached and nonattacheddevices. A shaker is an attacheddevice, while an impactor is not, (although it does make contact for ashort period of time).
Shaker Testing
The most useful shakers for modaltesting are the electromagneticshown in Fig. 2.6 (often called electrodynamic) and the electrohydraulic (or, hydraulic) types. Withthe electromagnetic shaker, (the morecommon of the two), force is generat-ed by an alternating current thatdrives a magnetic coil. The maximumfrequency limit varies from approxi-mately 5 kHz to 20 kHz depending on the size; the smaller shakers having the higher operating range.The maximum force rating is also afunction of the size of the shaker andvaries from approximately 2 lbf to1000 lbf; the smaller the shaker, thelower the force rating.
With hydraulic shakers, force is generated through the use of hydraulics, which can provide muchhigher force levels – some up to several thousand pounds. The maxi-mum frequency range is much lowerthough – about 1 kHz and below. Anadvantage of the hydraulic shaker isits ability to apply a large static pre-load to the structure. This is usefulfor massive structures such as grind-ing machines that operate under relatively high preloads which may alter their structural characteristics.

20
There are several potential problemareas to consider when using a shaker system for excitation. Tobegin with, the shaker is physicallymounted to the structure via theforce transducer, thus creating thepossibility of altering the dynamics of the structure. With lightweightstructures, the mechanism used tomount the load cell may add appre-ciable mass to the structure. Thiscauses the force measured by theload cell to be greater than the forceactually applied to the structure.Figure 2.7 describes how this massloading alters the input force. Sincethe extra mass is between the loadcell and the structure the load cellsenses this extra mass as part of the structure.
Since the frequency response is a single input function, the shakershould transmit only one componentof force in line with the main axis ofthe load cell. In practical situations,when a structure is displaced along a linear axis it also tends to rotateabout the other two axes. To mini-mize the problem of forces beingapplied in other directions, the shakershould be connected to the load cell through a slender rod, called a stinger, to allow the structure tomove freely in the other directions.This rod, shown in Figure 2.8, has a strong axial stiffness, but weakbending and shear stiffnesses. Ineffect, it acts like a truss member,carrying only axial loads but nomoments or shear loads.
Figure 2.6Electrodynamic shaker with power amplifier and signal source
Figure 2.7Mass loading from shaker setup
Power Amplifier
Ax
Fs
Fm
F1
Fs = Fm - MmAx
LoadingMass
LoadCell
Structure

21
The method of supporting the shakeris another factor that can affect theforce imparted to the structure. Themain body of the shaker must be isolated from the structure to preventany reaction forces from being trans-mitted through the base of the shakerback to the structure. This can beaccomplished by mounting the shakeron a solid floor and suspending thestructure from above. The shakercould also be supported on a mechan-ically isolated foundation. Anothermethod is to suspend the shaker, inwhich case an inertial mass usuallyneeds to be attached to the shakerbody in order to generate a measura-ble force, particularly at lower frequencies. Figure 2.9 illustrates the different types of shaker setups.
Another potential problem associatedwith electromagnetic shakers is theimpedance mismatch that can existbetween the structure and the shakercoil. The electrical impedance of theshaker varies with the amplitude ofmotion of the coil. At a resonancewith a small effective mass, very little force is required to produce aresponse. This can result in a drop in the force spectrum in the vicinityof the resonance, causing the force measurement to be susceptible tonoise. Figure 2.10 illustrates anexample of this phenomenon. Theproblem can usually be corrected byusing shakers with different size coilsor driving the shaker with a constant-current type amplifier. The shakercould also be moved to a point with alarger effective mass.
Figure 2.8Stinger attachment to structure
Figure 2.9Test support mechanisms
Figure 2.10Shaker/structureimpedance mismatch
POWER SPEC1 30 Avg 50%Ovlp Hann-20.0
dB
-100
Fxd Y 1.1k Hz 2.1k
FREQ RESP 30 Avg 50%Ovlp Hann40.0
dB
-40.0
Fxd Y 1.1k Hz 2.1k
rms
V2
FRF
Force Spectrum

22
Impact Testing
Another common excitation mecha-nism in modal testing is an impactdevice. Although it is a relatively simple technique to implement, it’sdifficult to obtain consistent results.The convenience of this technique is attractive because it requires verylittle hardware and provides shortermeasurement times. The method ofapplying the impulse, shown in Figure2.11, includes a hammer, an electricgun or a suspended mass. The ham-mer, the most common of these, isused in the following discussion.However, this information alsoapplies to the other types of impact devices.
Since the force is an impulse, theamplitude level of the energy appliedto the structure is a function of themass and the velocity of the hammer.This is due to the concept of linearmomentum, which is defined as masstimes velocity. The linear impulse isequal to the incremental change inthe linear momentum. It is difficultthough to control the velocity of thehammer, so the force level is usuallycontrolled by varying the mass.Impact hammers are available inweights varying from a few ounces to several pounds. Also, mass can beadded to or removed from most ham-mers, making them useful for testingobjects of varying sizes and weights.
The frequency content of the energyapplied to the structure is a functionof the stiffness of the contacting sur-faces and, to a lesser extent, the massof the hammer. The stiffness of thecontacting surfaces affects the shapeof the force pulse, which in turndetermines the frequency content.
Figure 2.11Impact devices for testing
Figure 2.12Frequency content of various pulses
Hz 2.5kFxd X 0
-130
dB
10.0/Div
-50.0
POWER SPEC1 1Avg 0%Ovlp Fr/Ex
rms
v 2
Sec 15.9mFxd Y -46.9µ
-50.0m
Real
50.0m
/Div
350m
FILT TIIME1 0%Ovlp
v
t
Hard
Medium
Soft
Pulse
Soft
Medium
Hard

23
It is not feasible to change the stiffness of the test object, thereforethe frequency content is controlled byvarying the stiffness of the hammertip. The harder the tip, the shorterthe pulse duration and thus the high-er the frequency content. Figure 2.12 illustrates this effect on the forcespectrum. The rule of thumb is tochoose a tip so that the amplitude of the force spectrum is no more than 10 dB to 20 dB down at the maximum frequency of interest asshown in Figure 2.13. A disadvantageto note here is that the force spec-trum of an impact excitation cannotbe band-limited at lower frequencieswhen making zoom measurements, so the lower out-of-band modes willstill be excited.
Impact testing has two potential signal processing problems associat-ed with it. The first – noise – can be present in either the force orresponse signal as a result of a longtime record. The second – leakage –can be present in the response signalas a result of a short time record.Compensation for both these prob-lems can be accomplished with windowing techniques.
Since the force pulse is usually veryshort relative to the length of the timerecord, the portion of the signal afterthe pulse is noise and can be elimi-nated without affecting the pulseitself. The window designed to accomplish this, called a force window, is shown in Figure 2.14. The small amount of oscillation thatoccurs at the end of the pulse is actually part of the pulse. It is aresult of signal processing and should not be truncated.
Figure 2.13Useful frequencyrange of pulse spectrum
Figure 2.14Force pulse with force window applied
Hz 2.5kFxd Y 0
-130
dB
10.0/Div
-50.0
POWER SPEC1 1Avg 0%Ovlp Fr/Ex
rms
v 2
-72 dB
-88 dB
Sec 100mFxd X 250µ
-40.0m
Real
20.0m
/Div
120m
FILT TIIME1 0%Ovlp
v
Force Pulse
TimeForce Window
Ampl
1.0
τ

24
The response signal is an exponentialdecaying function and may decay outbefore or after the end of the meas-urement. If the structure is heavilydamped, the response may decay outbefore the end of the time record. Inthis case, the response window canbe used to eliminate the remainingnoise in the time record. If the struc-ture is lightly damped, the responsemay continue beyond the end of thetime record. In this case, it must beartificially forced to decay out to min-imize leakage. The window designedto accomplish either result, called the exponential window, is shown inFigure 2.15. The rule of thumb forsetting the time constant, (the timerequired for the amplitude to bereduced by a factor of 1/e), is aboutone-fourth the time record length, T.The result of this is shown in Figure 2.15.
Unlike the force window, the expo-nential window can alter the resultingfrequency response because it has the effect of adding artificial dampingto the system. The added dampingcoefficient can usually be backedout of the measurement after signalprocessing, but numerical problemsmay arise with lightly damped struc-tures. This can happen when theadded damping from the exponentialwindow is significantly more than the true damping in the structure. Abetter measurement procedure in thiscase would be to zoom, thus utilizinga longer time record in order to capture the entire response, instead of relying on the exponential window.
Figure 2.15Decaying response with exponential window applied
Sec
Sec
512m
512m
Fxd Y
Fxd Y
0.0
0.0
-250m
-250m
Real
Real
62.5m
/Div
62.5m
/Div
250m
250m
FILT TIIME2
WIND TIIME2
No Data
0% Ovlp
v
v
Response
Exponential Decaying Response
Exponential Window
Ampl
Time
Windowed Response

25
Transduction
Now that an excitation system hasbeen set up to force the structure intomotion, the transducers for sensingforce and motion need to be selected.Although there are various types oftransducers, the piezoelectric type is the most widely used for modaltesting. It has wide frequency anddynamic ranges, good linearity and isrelatively durable. The piezoelectrictransducer is an electromechanicalsensor that generates an electricaloutput when subjected to vibration.This is accomplished with a crystalelement that creates an electricalcharge when mechanically strained.
The mechanism of the force transduc-er, called a load cell, functions in afairly simple manner. When the crys-tal element is strained, either by ten-sion or compression, it generates acharge proportional to the appliedforce. In this case, the applied forceis from the shaker. However, due tomounting methods discussed earlier,this is not necessarily the force trans-mitted to the structure.
The mechanism of the responsetransducer, called an accelerometer,functions in a similar manner. Whenthe accelerometer vibrates, an inter-nal mass in the assembly applies aforce to the crystal element which isproportional to the acceleration. This relationship is simply Newton’s Law:force equals mass times acceleration.
The properties to consider in selecting a load cell include both thetype of force sensor and its perfor-mance characteristics. The type offorce sensing for which load cells aredesigned include compression, ten-sion, impact or some combination
Figure 2.16Frequency response of transducer
Figure 2.17Stud mounted load cell
dB M
ag
Frequency
Useable Frequency Range
Response Transducer (Accelerometer)

26
thereof. Most shaker tests require atleast a compression and tension type.A hammer test, for example, wouldrequire an impact transducer.
Some of the operating specificationsto consider are sensitivity, resonantfrequency, temperature range andshock rating. Sensitivity is measuredin terms of voltage/force with units of mV/1b or mV/N. Analyzers have a range of input voltage settings;therefore, sensitivity should be chosen along with a power supplyamplification level to generate a measurable voltage.
The resonant frequency of a load cellis simply a function of its physicalmass and stiffness characteristics.The frequency range of the testshould fall within the linear rangebelow the resonant peak of the fre-quency response of the load cell, asshown in Figure 2.16. The rule ofthumb for shock rating is that themaximum vibration level expectedduring the test should not exceed onethird the shock rating.
The load cell should be mounted tothe structure with a threaded stud forbest results as shown in Figure 2.17.If this is not feasible, then an alterna-tive method of first fixing a spacer tothe structure with some type of adhe-sive (such as dental cement) and thenstud mounting the load cell to thisspacer will usually suffice for lowforce levels.
The properties to consider in select-ing an accelerometer are very similarto those of the load cell, althoughthey are related to acceleration ratherthan force. The type of response islimited to acceleration as the termimplies, since displacement andvelocity transducers are not available
Figure 2.18Frequency response of transducer
Useable Frequency Range
Useable Frequency Range
Useable Frequency Range
Stud
Cement, Wax
Magnet
20k-25k
15k-20k
5k-7k

27
in the piezoelectric type. However, ifdisplacement or velocity responsesare desired, the acceleration responsecan be artificially integrated once ortwice to give velocity and displace-ment responses, respectively.
In general, the optimum acceler-ometer has high sensitivity, wide frequency range and small mass.Trade-offs are usually made sincehigh sensitivity usually dictates a larger mass for all but the most expensive accelerometers. The sensitivity, measured in mV/G, and theshock rating should be selected in thesame manner as with the load cell.
Although the resonant frequency ofthe accelerometer (freely suspended)is a function of its mass and stiffnesscharacteristics, the actual natural frequency (when mounted) is general-ly dictated by the stiffness of themounting method used. The effect ofvarious mounting methods is shownin Figure 2.18. The rule of thumb isto set the maximum frequency of thetest at no more than one-tenth themounted natural frequency of the accelerometer. This is within the linear range of the mounted frequen-cy response of the accelerometer.
Another important consideration isthe effect of mass loading from theaccelerometer. This occurs as aresult of the mass of the accelerome-ter being a significant fraction of theeffective mass of a particular mode.A simple procedure to determine ifthis loading is significant can be done as follows:
Figure 2.19Mass loading from accelerometer
Hz 2.5kFxd Y 0
-30.0
dB
10.0/Div
50.0
FREQ RESP 3Avg 0%Ovlp FR/Ex
Frequency
Amplitude
● Measure a typical frequency response function of the test objectusing the desired accelerometer.
● Mount another accelerometer (in addition to the first) with thesame mass at the same point andrepeat the measurement.
● Compare the two measurements andlook for frequency shifts and ampli-tude changes.
If the two measurements differ signif-icantly, as illustrated in Figure 2.19,then mass loading is a problem andan accelerometer with less massshould be used. On very small struc-tures, it may be necessary to measurethe response with a non-contactingtransducer, such as an acoustical oroptical sensor, in order to eliminateany mass loading.

28
Figure 2.20Example of the input half ranging
Figure 2.21Example of the input under ranging
Figure 2.22Example of the input over ranging
Sec 8.0mFxd XY 0.0
-80.0m
Real
20.0m
/Div
80.0m
INST TIME2
FREQ RESP 50 Avg 50% Ovlp Hann40.0
dB
-40.0
Fxd XY 1.1k Hz 2.1k
COHERENCE 50 Avg 50% Ovlp Hann1.1
Mag
0.0
Fxd Y 1.1k Hz 2.1k
v
Sec 8.0mFxd XY 0.0
-130m
Real
32.5m
/Div
130m
INST TIME2
FREQ RESP 50 Avg 50% Ovlp Hann40.0
dB
-40.0
Fxd XY 1.1k Hz 2.1k
COHERENCE 50 Avg 50% Ovlp Hann1.1
Mag
0.0
Fxd Y 1.1k Hz 2.1k
v
Sec 8.0mFxd X 0.0
-80.0m
Real
20.0m
/Div
80.0m
INST TIME2
FREQ RESP 50 Avg 50% Ovlp Hann40.0
dB
-40.0
Fxd XY 1.1k Hz 2.1k
COHERENCE 50 Avg 50% Ovlp Hann1.1
Mag
0.0
Fxd Y 1.1k Hz 2.1k
v
Ov2
Ov2 Ov2

29
Measurement Interpretation
Having discussed the mechanics ofsetting up a modal test, it is appropri-ate at this point to make some trialmeasurements and examine theirtrends before proceeding with datacollection. Taking the time to investi-gate preliminaries of the test, such as exciter or response locations, various types of excitation functionsand different signal processingparameters will lead to higher qualitymeasurements. This section includespreliminary checks such as adequatesignal levels, minimum leakage measurements and linearity and reciprocity checks. The concept andtrends of the driving point measure-ment and the combinations of mea-surements that constitute a completemodal survey are discussed.
After the structure has been support-ed and instrumented for the test, the time domain signals should beexamined before making measure-ments. The input range settings onthe analyzer should be set at no morethan two times the maximum signallevel as shown in Figure 2.20. Oftencalled half-ranging, this takes advan-tage of the dynamic range of the analog-to-digital converter withoutunderranging or overranging the signals.
The effect resulting from under-ranging a signal, where the responseinput level is severely low relative tothe analyzer setting, is illustrated inFigure 2.21. Notice the apparentnoise between the peaks in the fre-quency response and the resultingpoor coherence function. In Figure 2.22, the response is severelyoverloading the analyzer input sec-tion and is being clipped. This resultsin poor frequency response and, consequently, poor coherence sincethe actual response is not being measured correctly.
It is also advisable to verify that thesignals are indeed the type expected,(e.g., random noise). With a randomsignal, it is advisable to measure thehistogram to verify that it is not contaminated with other signal components, i.e., it has a Gaussiandistribution as shown in Figure 2.23.This can be visually checked as illustrated with the transient signalsin Figure 2.24.
Figure 2.23Random test signals
Figure 2.24Transient test signals
HIST 1 90 Avg 50%Ovlp10.0
k
Real
0.0
Fxd XY -10.0m V 10.0m
FILT TIME 1 50%Ovlp
10.0m
Real
-10.0m
Fxd Y 0.0 Sec 799m
v
Histogram
Random Noise
FILT TIME 2 0%Ovlp700
m
Real
-700m
Fxd Y 0.0 Sec 512m
FILT TIME 1 0%Ovlp
400m
Real
-400m
Fxd Y 0.0 Sec 512m
v
v
Typical Force
Exponential Decaying
Response

30
Measurement Averaging
In order to reduce the statistical variance of a measurement with arandom excitation function (such asrandom noise) and also reduce theeffects of nonlinearities, it is neces-sary to employ an averaging process.By averaging several time recordstogether, statistical reliability canbe increased and random noise asso-ciated with nonlinearities can bereduced. One method to gain insightinto the variance of a measurement is to observe the Nyquist display of
the frequency response. The circleappears very distorted for a measure-ment with few averages, but begins to smooth out with more and moreaverages. This process can be seen in Figure 3.1. With each data recordacquired, the frequency spectrum hasa different magnitude and phase distribution. As these spectra are averaged, the nonlinear terms tend to cancel, thus resulting in the bestlinear estimate.
Chapter 3Improving Measurement Accuracy
Figure 3.1Measurement averaging frequency response
Real 128Fxd Y -128
-100
Imag
100
FREQ RESP 5 Avg 50% Ovlp Hann
Real 128Fxd XY -128
-100
Imag
100
FREQ RESP 30 Avg 50% Ovlp Hann
FREQ RESP40.0
dB
-40.0
Fxd Y 1.1k Hz 2.1k
COHERENCE 5 Avg 50% Ovlp Hann1.1
Mag
0.0
Fxd Y 1.1k Hz 2.1k5 Avg 50% Ovlp Hann
FREQ RESP40.0
dB
-40.0
Fxd Y 1.1k Hz 2.1k
COHERENCE 30 Avg 50% Ovlp Hann1.1
Mag
0.0
Fxd Y 1.1k Hz 2.1k30 Avg 50% Ovlp Hann
30 Averages
5 Averages

31
Windowing Time Data
There is a property of the Fast Fourier transform (FFT) that affectsthe energy distribution in the frequen-cy spectrum. It is the result of thephysical limitation of measuring afinite length time record along withthe periodicity assumption requiredof the time record by the FFT. Thisdoes not present a problem when thesignal is exactly periodic in the timerecord or when a transient signal iscompletely captured within the timerecord. However, in the case of truerandom excitation or in the transientcase when the entire response is notcaptured, a phenomenon called leak-age results. This has the effect ofsmearing or leaking energy into adja-cent frequency lines of the spectrum,thus distorting it. Figure 3.2 illus-trates an example of the effects of severe leakage problems with truerandom excitation. The effect is to underestimate the amplitude andoverestimate the damping factor.
One of the most common techniquesfor reducing the effects of leakagewith a non-periodic signal is to artifi-cially force the signal to 0 at thebeginning and end of the time recordto make it appear periodic to the analyzer. This is accomplished bymultiplying the time record by amathematical curve, known as a win-dow function, before processing theFFT. Another measurement is takenwith a Hann window applied to thetrue random excitation signal, shownin Figure 3.3. This measurement ismore accurate, but notice that thecoherence is still less than unity atthe resonance. The window does not
Figure 3.2Frequency response with true random signal and no windows
Figure 3.3Frequency response with burst random signal
Sec 799mFxd Y 0.0
-50.0m
Real
12.5m
/Div
50.0m
FILT TIME2
FREQ RESP 50 Avg 50% Ovlp Unif40.0
dB
-40.0
Fxd Y 1.1k Hz 2.1k
COHERENCE 50 Avg 50% Ovlp Unif1.1
Mag
0.0
Fxd Y 1.1k Hz 2.1k
v
True Random Noise
50%Ovlp
FREQ RESP 50 Avg 50% Ovlp Hann40.0
dB
-40.0
Fxd Y 1.1k Hz 2.1k
COHERENCE 50 Avg 50% Ovlp Hann1.1
Mag
0.0
Fxd Y 1.1k Hz 2.1k

32
eliminate leakage completely and italso distorts the measurement as a result of eliminating some data. Abetter measurement technique is touse an excitation that is periodicwithin the time record such as burstrandom, in order to eliminate theleakage problem as illustrated inFigure 3.4.
Increasing Measurement Resolution
Another measurement capability that is often needed, particularly for lightly damped structures, is toobtain more frequency resolution inthe vicinity of resonance peaks. Itmay not be possible in a basebandmeasurement to extract valid modalparameters with inadequate informa-tion. Normally, the Fourier transformis calculated over a frequency rangefrom 0 to some maximum frequency.Zoom processing is a technique inwhich the lower and upper frequencylimits are independently selectableover fixed ranges within the analyzer.The capability to zoom allows closelyspaced modes to be more accuratelyidentified by concentrating the mea-surement points over a narrowerband. The result of this increasedmeasurement accuracy is shown inFigure 3.5. Another result is that distortion due to leakage is reduced, because the smearing of energy is now within a narrower bandwidth,but not eliminated. Another relatedprocess associated with zooming isthe ability to band-limit the excitationto concentrate the available energywithin the given frequency range of the test.
Figure 3.4Frequency response with true random signal andHann window
Sec 799mFxd Y 0.0
-50.0m
Real
12.5m
/Div
50.0m
FILT TIME2
FREQ RESP 15 Avg 0% Ovlp Unif40.0
dB
-40.0
Fxd Y 1.1k Hz 2.1k
COHERENCE 15 Avg 0% Ovlp Unif1.1
Mag
0.0
Fxd Y 1.1k Hz 2.1k
v
Burst Random Signal
0%Ovlp

33
Figure 3.5Effects of increasing frequency resolution
Real 257Fxd Y -257
-200
Imag
200
FREQ RESP 50 Avg 0% Ovlp Hann
Real
Real
128
128
Fxd XY
Fxd Y
-128
-128
-100
-100
Imag
Imag
100
100
FREQ RESP
FREQ RESP
50 Avg 5% Ovlp Hann
50 Avg 50% Ovlp Hann
FREQ RESP50.0
dB
-30.0
Fxd Y 0 Hz 4k
COHERENCE 50 Avg 0% Ovlp Hann1.1
Mag
0.0
Fxd Y 0 Hz 4k50 Avg 0% Ovlp Hann
FREQ RESP
FREQ RESP
40.0
40.0
dB
dB
-40.0
-40.0
Fxd Y 745
Fxd Y 1.2k
Hz
Hz
2.345k
1.6k
COHERENCE
COHERENCE
50 Avg 5% Ovlp Hann
50 Avg 50% Ovlp Hann
1.1
1.1
Mag
Mag
0.0
0.0
Fxd Y 745
Fxd Y 1.2k
Hz
Hz
2.345k
1.6k
50 Avg 5% Ovlp Hann
50 Avg 50% Ovlp Hann
1st Zoom Span
2nd Zoom Span
Baseband Measurement

34
Complete Survey
As frequency response functions arebeing acquired and stored for subse-quent modal parameter estimation, an adequate set of measurementsmust be collected in order to arriveat a complete set of modal parame-ters. This section describes the number and type of measurementsthat constitute complete modal sur-vey. Definitions and concepts, suchas driving point measurement anda row or column of the frequency response matrix are discussed.Optimal shaker and accelerometerlocations are also included.
A complete, although redundant, setof frequency response measurementswould form a square matrix of size N,where the row corresponds toresponse points and the columns correspond to excitation points, asillustrated in Figure 3.6. It can beshown, however, that any particularrow or column contains sufficient information to compute the completeset of frequencies, damping, andmode shapes. In other words, if the excitation is at point 3, and theresponse is measured at all thepoints, including point 3, then columnof the frequency response matrix willbe measured. This situation would bethe result of a shaker test. On theother hand, if an accelerometer isattached to point 7, and a hammer isused to excite the structure at allpoints, including point 7, then row 7on the matrix will be measured. Thiswould be the result of an impact test.
The measurement where theresponse point and direction are thesame as the excitation point anddirection is called a driving pointmeasurement. The beam in Figure3.7 illustrates a measurement of thistype. Driving point measurements
form the diagonal of the frequencyresponse matrix shown above. Theyalso exhibit unique characteristicsthat are not only useful for checkingmeasurement quality, but necessaryfor accomplishing a comprehensivemodal analysis, which includes notonly frequencies, damping factors andscaled mode shapes, but modal mass
and stiffness as well. It is not neces-sary to make a driving point measure-ment to obtain only frequencies,damping factors and unscaled modeshapes. However, a set of scaledmode shapes and consequently,modal mass and stiffness cannot beextracted from a set of measurementsthat does not contain a driving point.
Figure 3.6Frequency response matrix
Figure 3.7Driving point measurementsetup
H11 H12 H1N
H21 H22
HN1 HNN

35
Recall from Chapter 1, StructuralDynamics Background, that the response of a MDOF system is simplythe weighted sum of a number ofSDOF systems. The characteristics of the driving point measurement can be easily explained and presentedas a consequence of this property. Figure 3.8 shows a typical drivingpoint measurement displayed in rectangular and polar coordinates. As seen in the imaginary part of therectangular coordinates, all of the resonant peaks lie in the same direc-tion. In other words, they are inphase with each other. This charac-teristic becomes more intuitive when illustrated with the beam modes inFigure 3.9. The response point movesin the same direction as the excita-tion point at all the modes, since it is measured at the same physical location as the excitation.
By observing the trends of this measurement in polar coordinates in Figure 3.9, a further understandingof its characteristics can be gained.When the magnitude is displayed inlog format (dB), anti-resonancesoccur between every resonancethroughout the frequency range. Theindividual SDOF systems sum to 0 atthe frequencies where the mass andstiffness lines of adjacent modesintersect since all the modes are inphase with each other. This results in the near 0 magnitude of an anti-resonance. Also notice the phaselead as the magnitude passes throughan anti-resonance and the oppositephase lag as the magnitude passesthrough a resonance. These trends of the driving point measurementshould be observed and monitoredthroughout the measurement processas a check for maintaining a consistent set of data.
Figure 3.8Driving point frequency response
Figure 3.9Typical free beam mode shapes
FREQ RESP100
Imag
-100
Fxd Y 0 Hz 1.25k
FREQ RESP 3 Avg 0% Ovlp Fr/Ex56.0
Real
-56.0
Fxd Y 0 Hz 1.25k3 Avg 0% Ovlp Fr/Ex
FREQ RESP180
Phase
-180
Fxd Y 0 Hz 1.25k
FREQ RESP 3 Avg 0% Ovlp Fr/Ex40.0
dB
-40.0
Fxd Y 0 Hz 1.25k3 Avg 0% Ovlp Fr/Ex

36
The remaining measurements, wherethe response coordinates are differ-ent from the excitation coordinates,are called cross-point measurements.Figure 3.10 illustrates a typical cross-point measurement. All the modes are not necessarily in phase witheach other, as seen in the imaginarydisplay. Since the response pointsare not at the same location as theexcitation point, the response canmove either in phase or out of phasewith the excitation. This motion,which defines the mode shape, is a function of the measurement location, and will vary from measure-ment to measurement. In the dB display, if any two adjacent modesare in phase at a particular point,then an anti-resonance will existbetween them. If any two adjacentmodes are out of phase, then theirmass and stiffness lines will not cancel at the intersection and asmooth curve will appear instead,as seen in Figure 3.10.
In order to excite all the modes within the frequency range of inter-est, several shaker or accelerometerlocations should be examined. Apoint or line on the structure thatremains stationary is called a nodepoint or node line. The node pointsof a cantilever beam are illustrated inFigure 3.11. The number and locationof these nodes are a function of theparticular mode of vibration andincrease as mode number increases.
Figure 3.10Cross-point frequency response
Figure 3.11Typical cantilever beam mode shapes
FREQ RESP100
Imag
-100
Fxd Y 0 Hz 1.25k
FREQ RESP 3 Avg 0% Ovlp Fr/Ex56.0
Real
-56.0
Fxd Y 0 Hz 1.25k3 Avg 0% Ovlp Fr/Ex
FREQ RESP180
Phase
-180
Fxd Y 0 Hz 1.25k
FREQ RESP 3 Avg 0% Ovlp Fr/Ex40.0
dB
-40.0
Fxd Y 0 Hz 1.25k3 Avg 0% Ovlp Fr/Ex
2 13

37
If the response is measured at theend of the beam at point 1 and excitation is applied at point 3, allmodes will be excited and the result-ing frequency response will containall the modes as shown in Figure3.10. However, if the response is atpoint 1 but the excitation is moved topoint 2, the second mode will not beexcited and the resulting frequencyresponse will appear as shown in Figure 3.12. Referring to Figure 3.11,note that point 2 is a node point formode 2 and very near a node pointfor mode 3. Mode 2 does not appearin the imaginary display and mode 3is barely discernible. In dB coordi-nates, the mode 3 appears to exist butit is still difficult to observe mode 2.It may be advisable or necessary attimes to gather more than one set ofdata at different excitation locationsin order to measure all the modes. Itshould also be noted that the sameobservations can be made in animpact test where the response point would also be moved to various locations.
Another concept associated with alinear structure concerns a propertyof the frequency response matrix.The frequency response matrix for a linear system can be shown to be symmetric due to Maxwell’sReciprocity Theorem. Simply stated,a measurement with the excitation at point i and the response at point jis equal to the measurement with the excitation at point j and the response at point i. This is illustratedin Figure 3.13. A check can be madeon the measurement process by comparing these two reciprocal measurements at various pairs ofpoints and observing any differencesbetween them. This can be helpfulfor noting nonlinearities when applying different force levels.
Figure 3.12Frequency response with excitation at node of vibration
Figure 3.13Symmetric frequencyresponse matrix
FREQ RESP40.0
dB
-40.0
Fxd Y 0 Hz 1.25k
FREQ RESP 3 Avg 0% Ovlp Fr/Ex100
Imag
-100
Fxd Y 0 Hz 1.25k3 Avg 0% Ovlp Fr/Ex
FREQ RESP40.0
dB
-40.0
Fxd Y 0 Hz 1.25k
FREQ RESP 3 Avg 0% Ovlp Fr/Ex56.0
Imag
-56.0
Fxd Y 0 Hz 1.25k3 Avg 0% Ovlp Fr/Ex
H11 H12 H1N
H21 H22
HN1 HNN
Hji
Hij
Hij = Hji

38
Introduction
The previous chapter presented several techniques for making frequency response measurementsfor modal analysis. Having acquiredthis data, the next major step of theprocess is the use of parameter esti-mation techniques – “curve fitting” –to identify the modal parameters. Avast amount of literature exists onthe subject of curve fitting measureddata to estimate the modal properties of a structure. However, this information tends to be mathemati-cally vigorous and is generally biasedtoward a particular type of algorithm.It is the intent of this chapter to cate-gorize, in a conceptual manner, thedifferent types of curve fttters anddiscuss the applications and prob-lems associated with those most commonly implemented.
It was discussed earlier that a minimum of one row or column ofthe frequency response matrix, or itsequivalent, must be measured inorder to identify a complete set ofmodal parameters. Although addi-tional data is, in principle, redundantinformation, it can be used to verify
and increase the confidence level ofthe estimated parameters. The fre-quency and damping for each modecan be estimated from any combina-tion of these measurements. The residues and, consequently, the modalcoefficients are then computed foreach measurement point. The modeshapes are then scaled and sorted foreach resonant frequency. Finally, the modal mass and stiffness can bedetermined from these scaled param-eters as illustrated in Figure 4.1.
Chapter 4Modal Parameter Estimation
Figure 4.1Typical flow of modal test
Scale ModeShapel
l
Modal MassModalStiffness
Measurecompleteset offrequencyresponses
Identify Modall
l
l
FrequencyDampingMode Shape

39
Modal Parameters
One of the most fundamental assumptions of modal testing is that a mode of vibration can be excited at any point on the structure, exceptat nodes of vibration where it has nomotion. This is why a single row orcolumn of the frequency responsematrix provides sufficient informa-tion to estimate modal parameters.As a result, the frequency and damp-ing of any mode in a structure areconstants that can be estimated from any one of the measurements as shown in Figure 4.2. In otherwords, the frequency and damping of any mode are global properties ofthe structure.
In practical applications, it is impor-tant to include sufficient points in thetest to completely describe all themodes of interest. If the excitationpoint has not been chosen carefullyor if enough response points are not measured, then a particular modemay not be adequately represented.At times it may become necessary toinclude more than one excitationlocation in order to adequatelydescribe all of the modes of interest.Frequency responses can be meas-ured independently with single-pointexcitation or simultanously with multiple-point excitations.
The mode shapes as a whole are alsoglobal properties of the structure, buthave relative values depending on thepoint of excitation and scaling andsorting factors. On the other hand,each individual modal coefficient thatmakes up the mode shape is a localproperty in the sense that it is esti-mated from the particular measure-ment associated with that point asshown in Figure 4.3.
Figure 4.2Concepts of modal parameters
Figure 4.3Modal parameters
Frequency
Damping
Mode = 1Mode = 2
Mode = 3
Vibrating Beam
MeasurementPoints
Damping, frequency — same at each measurement pointMode shape — obtained at same frequency from all measurement points
ωζ
— Frequency— Damping
{ } — Mode Shapeφ
Global
Local

40
Curve Fitting Methods
Due to the large amount of literatureand algorithms currently available forcurve fitting structural data, it has become difficult to determine the exact need for each method andwhich method is best. There is noideal solution and the common methods are only approximations.Also, many of the methods are verysimilar to each other and, in somecases, simply extensions of a fewbasic techniques.
Although there are several ways inwhich curve fitting methods can becategorized, the most straightforwardis single-mode versus multiple-mode classification. Besides the intuitive reasoning for single- and multiple-mode approximations, thereare some practical reasons for thisclassification. The major differencein the level of sophistication, or level of accuracy, among curve fittersis between a single-mode and a multi-ple-mode method. Also, the comput-ing resources needed (computationspeed, memory size and I/0 capabili-ty) for multiple-mode methods can increase tremendously. Othersub-catagories and extensions thatfall mostly within multiple-modemethods are shown in Figure 4.4.
Users generally fall into one of threemajor groups. The first group is pri-marily concerned with troubleshoot-ing existing mechanical equipment.They are usually concerned with timeand require a fast, medium qualitycurve fitter. The second group ismore serious about quantitativeparameter estimates for use in a
modal model. For example, theyrequire more accuracy and are willingto spend more time obtaining results.The final group is pushing the state ofthe art and is involved with develop-ment work. Accuracy, rather than time, is of paramount importance.
Figure 4.4Increasing accuracy in curve fit methods
Multi-Measurementl
l
Global AccuracyLarge Amount ofData Processing
Single-ModeMethodsl
l
Easy, fastLimited
Multi-ModeMethodsl
l
MoreAccurateSlower

41
Single-Mode Methods
As stated earlier, the general procedure for estimating modal parameters is to estimate frequenciesand damping factors, then estimatemodal coefficients. For most single-mode parameter estimation tech-niques, however, this is not alwaysthe case. In fact, it is not absolutelynecessary to estimate damping inorder to obtain modal coefficients.This is typical in a troubleshooting environment where frequencies andmode shapes are of primary concern.
The basic assumption for single-modeapproximations is that in the vicinityof a resonance, the response is dueprimarily to that single mode. Theresonant frequency can be estimatedfrom the frequency response data (illustrated in Figure 4.5) by observ-ing the frequency at which any of thefollowing trends occur:
Figure 4.5Frequency response
ωn — Frequency
Real
Imaginary
ωn — Frequency
Magnitude
Phase
● The magnitude of the frequencyresponse is a maximum.
● The imaginary part of the frequency response is a maximum or minimum.
● The real part of the frequency response is zero.
● The response lags the input by 90° phase.
It was discussed earlier that theheight of the resonant peak is a function of damping. The dampingfactor can be estimated by the half-power method or other related math-ematical or graphical method. In thehalf-power method, the damping isestimated by determining the sharp-ness of the resonant peak. It can beshown from Figure 4.6 that dampingcan be related to the width of the

42
peak between the half-power points:points below and above the resonantpeak at which the response magni-tude is .7071 times the resonant magnitude.
One of the simplest single-modemodal coefficient estimation tech-niques is the quadrature method,often called “peak picking”. Modalcoefficients are estimated from theimaginary (quadrature) part of thefrequency response, so the method isnot a curve fit in the strict sense ofthe term. As mentioned earlier, theimaginary part reaches a maximum atthe resonant frequency and is 90° out of phase with respect to theinput. The magnitude of the modalcoefficient is simply taken as the value of the imaginary part at resonance as illustrated in Figure 4.7.The sign (phase) is taken from the direction that the peak lies along the imaginary axis, either positive ornegative. This implies that the phaseangle is either 0° or 180°.
The quadrature response method isone of the more popular techniquesfor estimating modal parametersbecause it is easy to use, very fastand requires minimum computingresources. It is, however, sensitive tonoise on the measurement and effectsfrom adjacent modes. This method isbest suited for structures with lightdamping and well separated modeswhere modal coefficients are essen-tially real valued. It is most useful fortroubleshooting problems, however,where it is not necessary to create amodal model and time is limited.
Figure 4.6Damping factor from half power
Figure 4.7Quadrature peak pick
Figure 4.8Circle fit method
640m
80.0m
/Div
Mag
0.0
0 Hz 100
Damping
640m
160m
/Div
Imag
-640m
Modal Coefficient
Imaginary
Real
Modal Coefficient

43
Another single-mode technique,called the circle fit, was originallydeveloped for structural damping butcan be extended to the viscous damp-ing case. Recall from Chapter 1 thatthe frequency response of a modetraces out a circle in the imaginaryplane. The method fits a circle to the real and imaginary part of the frequency response data by minimiz-ing the error between the radius ofthe fitted circle and the measureddata. The modal coefficient is thendetermined from the diameter of thecircle as illustrated in Figure 4.8. Thephase is determined from the positiveor negative half of the imaginary axisin which the circle lies.
Frequency and damping can be estimated by one of the methods discussed earlier or by some of theMDOF methods to be discussed later.Damping can also be estimated fromthe spacing of points along theNyquist plot from the circle.
The circle fit method is fairly fast and requires minimum computerresources. It usually results in betterparameter estimates than obtained by the quadrature method because it uses more of the measurementinformation and is not as sensitive to effects from adjacent modes as illustrated in Figure 4.9. It is also less sensitive to noise and distortionon the measurement. However, it requires much more user interactionthan the quadrature method; conse-quently, it is prone to errors, particu-larly when fitting closely spacedmodes.
A SDOF method related to the circlefit is a frequency domain curve fit toa single-mode analytical expressionof the frequency response. Thisexpression is generally formulated as a second order polynomial withresidual terms to take into accountthe effects of out of band modes.Because of its similarities to the circle fit, it possesses the same basicadvantages and disadvantages.
Concept of Residual Terms
Before proceeding to multiple-modemethods, it is appropriate to discussthe residual effects that out-of-bandmodes have on estimated parameters.In general, structures possess an infinite number of modes. However,there are only a limited number thatare usually of concern. Figure 4.10illustrates the analytical expression
Figure 4.9Comparison of quadrature and circle fit methods
Figure 4.10Analytical expression of frequency response
Imaginary
Real
φPeakPick
φPeakPick
φ Circle Fit
φ Circle Fit
H( ) =ωn
r = 1Σ
φ φi j( n - ) + j(2 n)ω ω ζωω2 2

44
for the frequency response of a structure taking into account the total number of realizable modes.Unfortunately, the measured frequen-cy response is limited to some fre-quency range of interest dependingon the capabilities of the analyzer and the frequency resolution desired.This range may not necessarilyinclude several lower frequencymodes and most certainly will not include some higher frequencymodes. However, the residual effectsof these out-of-band modes will bepresent in the measurement and, consequently, affect the accuracy of parameter estimation.
Although parameters of the out-of-band modes cannot be identi-fied, their effects can be representedby two relatively simple terms. It canbe seen from Figure 4.11 that theeffects of the lower modes tend tohave mass-like behavior and theeffects of the higher modes tend tohave stiffness-like behavior. The analytical expression for the residualterms can then be written as shownin Figure 4.12. Notice that the residual terms are equivalent to theasymptotic behavior of the mass andstiffness of a SDOF system discussedin the chapter on structural dynamics.
Useful information can often begained from the residual terms thathas some physical significance. First,if the structure is freely supportedduring the test, then the low frequen-cy residual term can be a direct measure of rigid body mass proper-ties of the structure. The high fre-quency term, on the other hand, canbe a measure of the local flexibility of the driving point.
Figure 4.11Single mode summation of frequency response
Figure 4.12Residual terms of frequency response
dB M
agni
tude
0.0ω1 ω2 ω3 Frequency
dB M
agni
tude
0.0ω1 ω2 ω3 Frequency
Mass Line
Stiffness Line
H( ) =ω φ φi jk
Higher Modes
H( ) =ω φ φi j-w m2 Lower Modes

45
Multiple-Mode Methods
The single-mode methods discussedearlier perform reasonably well forstructures with lightly damped andwell separated modes. These meth-ods are also satisfactory in situationswhere accuracy is of secondary con-cern. However, for structures withclosely spaced modes, particularlywhen heavily damped, (as shown inFigure 4.13) the effects of adjacentmodes can cause significant approxi-mations. In general, it will be neces-sary to implement a multiple-modemethod to more accurately identifythe modal parameters of these typesof structures.
The basic task of all multiple-modemethods is to estimate the coeffi-cients in a multiple- mode analyticalexpression for the frequencyresponse function. This is done bycurve fitting a multiple-mode form of the frequency response function to frequency domain measurements. An equivalent method is to curve fit a multiple response form of the impulse response function to timedomain data. In either process, allthe modal parameters (frequency,damping and modal coefficient) for all the modes are estimated simultaneously.
There are a number of multiple-modemethods currently available for curvefitting measured data to estimatemodal parameters. However, thereare essentially two different forms of the frequency response functionwhich are used for curve fitting.These are the partial fraction formand the polynomial form which areshown in Figure 4.14. They are equivalent analytical forms and can
Figure 4.13Damping and modal coupling
Figure 4.14Frequencyresponse representation
64.0
64.0
80
/Div
2.0
/Div
Mag
Mag
0.0
0.0
433.7
443.7
Hz
Hz
2.4437k
2.4437k
Light Damping and Coupling
Heavy Damping and Coupling
H( ) =ωb sn + b, sn - 1 + . . .0
Polynomial
h(t) =n
k = 1Σ Complex Exponential
H( ) =ωn
k = 1Σ
rk*j - pk*ω
rkj - pkω
+ Partial Fraction
a sm + a, sm - 1 + . . .0
rk e- kt + rk*e- *ktσ σ

46
be shown to be related to the struc-tural frequency response developedearlier in Chapter 1. The impulseresponse function, obtained byinverse Fourier transforming the frequency response function into thetime domain, is also shown in Figure4.14.
When the partial fraction form of thefrequency response is used, themodal parameters can be estimateddirectly from the curve fittingprocess. A least squares errorapproach yields a set of linear equations that must be solved for the modal coefficients and a set ofnonlinear equations that must besolved for frequency and damping.Because an iterative solution isrequired to solve these equations,there is potential for convergenceproblems and long computationtimes.
If the polynomial form of the frequen-cy response is used, the coefficientsof the polynomials are identified dur-ing the curve fitting process. A rootfinding solution must then be used to determine the modal parameters. Theadvantage of the polynomial form isthat the equations are linear and thecoefficients can be solved by a nonit-erative process. Therefore, conver-gence problems are minimal andcomputing time is more reasonable.
The complex exponential method is a time domain method that fitsdecaying exponentials to impulseresponse data. The equations arenonlinear, so an iterative procedure isnecessary to obtain a solution. Themethod is relatively insensitive tonoise on the data, but suffers fromsensitivity to time domain aliasing, asa result of truncation in the frequency domain from inverse Fourier trans-forming the frequency responses.
In principle, it should not matterwhether frequency domain data ortime domain data is used for curvefitting since the same information iscontained in both domains. However,there are some practical reasons,based on frequency domain and time domain operations, that seem to favorthe frequency domain. One, the mea-surement data can be restricted tosome desired frequency range andany noise or distortion outside thisrange can effectively be ignored.Another, the cross spectra andautospectra needed to compute fre-quency responses can be formed
faster than the corresponding time domain correlation functions. It istrue that the time domain can be usedto select modes having differentdamping values, but this is usuallynot as important as the ability toselect a frequency range of interest.
Each method has its advantages anddisadvantages, but the fundamentalproblems of noise, distortion andinterference from adjacent modesremain. As a result, none of themethods work well in all situations.It is also unlikely that some “magic”method will be discovered that elimi-nates all of these problems. All of themethods work well with ideal data,but cannot be evaluated by analyticalmeans alone. The important factor ishow well they work, or gracefully fail,with real experimental data completewith noise and distortion.

47
Concept of Real and Complex Modes
The structural model discussed so faris based on the concept of propor-tional viscous damping which impliesthe existence of real, or normal,modes. Mathematically, this impliesthat the physical damping matrix can be defined as linear combinationof the physical mass and stiffnessmatrices as shown in Figure 4.15.The mode shapes, are, in effect realvalued, meaning the phase angles differ by 0° or 180°. Physically, all the points reach their maximum excursion at the same time as in astanding wave pattern. One of theconsequences of this assumption, discussed earlier, is that the imagi-nary part of the frequency responsereaches a maximum at resonance and the real part is 0 valued as illus-trated in Figure 4.16. Note also thatthe Nyquist circle lies along the imaginary axis.
However, physical structures exhibita more complicated form of dampingwhich results in non-proportionaldamping. The mode shapes are, generally, complex valued, meaningthe phase angles can have values other than 0° or 180°. Physically, the points reach their maximum excursions at various times as in atraveling wave pattern. With non-proportional damping, the imaginarypart of the frequency response nolonger reaches a maximum at reso-nance nor is the real part nonzero valued as illustrated in Figure 4.17.Note also that the Nyquist circle is rotated at an angle in the complexplane.
When damping is light, as is the casein most mechanical structures, theproportional damping assumption isgenerally an accurate approximation. Although damping is not proportionalto the mass and stiffness, the nonpro-portional coupling effects may besmall enough not to cause seriouserrors. Physically, this means that thedamping is sufficiently small so that
coupling is a second-order effect. Itshould be noted that closely-spacedmodes often appear complex as aresult of the effects from adjacentmodes as illustrated in Figure 4.18.In reality, they may actually be more real than they appear.
Figure 4.15Proportional damping representation
Figure 4.16
Figure 4.17
Figure 4.18Two closely spaced real modes
[C] = a [M] + [K]β
Imaginary
Real
2 kσ
ω ω= k
Imaginary
ω ω= k
ak
r1k +r2k2 k
2 2
σ
Imaginary
Real

48
Introduction
The basic techniques for performing amodal test to identify the dynamicproperties of a structure have beendescribed in the previous chapters.An introduction to the applications of the resulting frequency responsesand modal parameters is the focus of this chapter. The discussion is spe-cifically concerned with the uses of aresponse model or a modal modelwith structural analysis methods asshown in Figure 5.1. The intent is tobring together the experimental andanalytical tools for solving noise,vibration and failure problems.
A response model is simply the set offrequency response measurementsacquired during the modal test.These measurements contain all thedynamics of the structure needed forsubsequent analyses. A modal modelis derived from the response modeland is a function of the parameterestimation technique used. It notonly includes frequencies, dampingfactors, and mode shapes, but alsomodal mass and modal stiffness.These masses and stiffnesses dependon the method that was used to scale the mode shapes. A subset of themodal model consisting of only thefrequencies and unscaled modeshapes can be useful for some troubleshooting applications wherefrequencies and mode shapes are theprimary concern. However, for appli-cations involving analysis methods,such as structural modification and
substructure coupling, a completemodal model is required. This definition of a complete modal modelshould not be confused with the concept of a truncated mode set inwhich all the modes are not included.
Chapter 5Structural Analysis Methods
Figure 5.1Alternative types of structural models
Physical Structure Model
Response Model (measurements)
Modal Model (parameters)
ωζφ
— Frequency— Damping
{ } — Mode Shape
FFT
Curve Fit

49
Structural Modification
When troubleshooting a vibrationproblem or investigating simpledesign changes, an analysis methodknown as structural modification,illustrated in Figure 5.2, can be veryuseful. Basically, the method deter-mines the effects of mass, stiffnessand damping changes on the dynamiccharacteristics of the structure. It isa straightforward technique and givesreasonable solutions for simpledesign studies. Some of the benefitsof using structural modification arereduced time and cost for implement-ing design changes and elimination of the trial-and-error approach tosolving existing vibration problems.The technique can be extended to an iterative process, often called sensitivity analysis, in order to categorize the sensitivity of specificamounts of mass, stiffness or damping changes.
In general, structural modificationinvolves two interrelated designinvestigations. In the first, a physicalmass, stiffness or damping changecan be specified with the analysisdetermining the modified set ofmodal parameters. The secondinvolves specifying a frequency andhaving the analysis determine theamount of mass, stiffness or dampingneeded to shift a resonance to thisnew frequency. For the user’s convenience, specific applications ofthese basic methods, such as tunedabsorber, design are usually included.
Figure 5.2Structural modification simulation
Structural modification can be imple-mented with either a response modelor a modal model. The advantages of response model are that it containsthe effects of modes outside the analysis range and the measurementscan be limited to the selected set ofmodified points. It is sensitive,though, to the quality of frequencyresponse measurements and theeffects of rigid body modes from
the support system. A modal modelrequires only one driving point measurement whereas a responsemodel requires a driving point measurement at every location to bemodified. The modal model may bemore intuitive since it contains directmass, stiffness and damping informa-tion directly. However, it does sufferfrom being tedious and time consum-ing to derive and is sensitive to thenumber and type of modes extracted.
40.0
7.5
/Div
dB
-20
FxdXY 1.375k Hz 2.975k
SYNTHESIS Pole Residue
Troublesome Mode
∆ Stiffness, Damping
Engine Mount
SM

50
Finite Element Correlation
Finite element analysis is a numericalprocedure useful for solving structur-al mechanics problems. More specifi-cally, it is an analytical method fordetermining the modal properties of a structure. It is often necessary tovalidate the results from this theoreti-cal prediction with measured datafrom a modal test. This correlationmethod is generally an iterativeprocess and involves two major steps.First, the modal parameters, both fre-quencies and mode shapes, are com-pared and the differences quantified.Second, adjustments and modifica-tions are made, usually to the finiteelement model, to achieve more com-parable results. The finite elementmodel can then be used to simulateresponses to actual operating environments.
The correlation task is usually begunby comparing the measured and pre-dicted frequencies. This is often doneby making a table to compare eachmode frequency by frequency asshown in Table 5.1. It is more useful,however, to graphically compare theentire set of frequencies by plottingmeasured versus the predicted results as shown in Figure 5.3. Thisshows not only the relative differenc-es between the frequencies, but alsothe global trends and suggests possi-ble causes of these differences. Ifthere is a direct correlation the pointswill lie on a straight line with a slopeof 1.0. If a random scatter arises,then the finite element model maynot be an accurate representation ofthe structure. This could result from
an inappropriate element type or a poor element mesh in the finite element model. It could also resultfrom incorrect boundary conditionsin either the test or the analysis. Ifthe points lie on a straight line, butwith a slope other than 1, then theproblem may be a mass loading prob-lem in the modal test or an incorrectmaterial property, such as elasticmodulus or material density, in thefinite element model.
The parameter comparison is notactually this simple, nor is it com-plete, because the mode shapes mustalso be compared at the same time to
ensure a one-to-one correspondence between the frequency and the modeshape. Remember that a distinctmode shape is associated with eachdistinct frequency. One technique for performing this comparison is to simply overlay the plotted modeshapes from the test and analysis andobserve their general trends. Thiscan become rather difficult, though,for structures with complicated geometry because the plots tend toget cluttered.
Figure 5.3Graphical comparison of frequencies
Table 5.1Tabular comparisons of frequency
FE (Hz) Test (Hz)
17.5 15.7
21.3 19.4
26.4 25.5
30.0 28.3
31.2 30.5
Fe
Test

51
Numerical techniques have beendeveloped to perform statistical comparisons between any two modeshapes, illustrated in Figure 5.4. Thefirst results in the modal scale factor(MSF) – a proportionality constantbetween the two shapes. If the constant is equal to 1.0, this meansthe shapes were scaled in the samemanner such as unity modal mass. Ifthe constant is any value other than1.0, then the shapes were scaled differently. The second, and moreimportant method, results in themodal assurance criterion (MAC), a correlation coefficient between thetwo mode shapes. If the coefficient isequal to 1.0, then the two shapes areperfectly correlated. In practice, any value between 0.9 and 1.0 is considered good correlation. If thecoefficient is any value less than 1.0,then there is some degree of inconsistency, proportional to thevalue of the factor, between theshapes. This can be caused by aninaccurate finite element model, asdescribed earlier, or the presence ofnoise and nonlinearities in the mea-sured data. It should be noted that inorder for these comparisons to havea reasonable degree of accuracy, it is very important that coordinatelocations in the modal test coincidewith coordinates in the finite element mesh.
There are other numerical methodsfor comparing the measured and predicted modal parameters of astructure. One such technique, calleddirect system parameter identifica-tion, is the derivation of a physicalmodel of a structure from measuredforce and response data. However,techniques such as this are beyondthe scope of this text and can befound in technical articles aboutmodal analysis.
Figure 5.4Numerical comparison of mode shapes
Mode 2
Mode 1
MAC — Correlation Coefficient
MSF — Proportionality Constant
How were the modes scaled?
Unit Modal Mass
[ ]M [ ]I
Are the modes the same mode?

52
Substructure Coupling Analysis
In analyses involving large structuresor structures with many componentsit may not be feasible to assemble afinite element model of the entire structure. The time involved in build-ing the model may be unacceptableand the model may contain more de-grees of freedom than the computercan handle. As a result, it may benecessary to employ a modelingreduction method known as substruc-ture coupling or component mode synthesis illustrated in Figure 5.5.
Substructure coupling involves thedivision of the structure into variouscomponents, modeling these compo-nents for their individual dynamicsand then combining these individualresults into one model to analyze the dynamics of the complete structure.These component models can take onseveral different mathematical formseach of which has a particular useful-ness. Common models include modalmodels and physical models from afinite element analysis, modal modelsfrom a modal test, rigid body modelsand physical springs and dampers.The component models are combinedthrough a transformation that relatestheir dynamics at the interfaces. Theresults from the analysis of the com-plete structure can then be correlatedwith equivalent modal test results inthe same manner as described earlier.
A modal model of a component forsubstructure coupling must containthe modal mass, stiffness and damp-ing factors along with the modalmatrix. The modal matrix of a structure is simply a matrix whosecolumns are comprised of the respec-
tive modes of the structure. In thespecial case where the mode shapeshave been scaled to unity modalmass, the modal model reduces to the frequencies, damping and modeshapes.
Figure 5.5Substructure coupling analysis
Airplane
Component Analysis
Fuselage
Wing
Engine
Wing
Engine
Fuselage

53
Forced Response Simulation
One of the major design goals formost engineering analyses is to beable to predict system responses toactual operating forces. This canenable engineers to ultimately findoptimal solutions to troublesomenoise or vibration problems. This technique, illustrated in Figure 5.6, is commonly called forced responsesimulation or forced response predic-tion. Forces can be specified for anydegree of freedom in the modalmodel and displacements, velocitiesor accelerations can be predicted forany degree of freedom.
Figure 5.6Forced response simulation
Force Inputs
System Model
Engine RPM Road Surface
ω, ζ, φ
System Response
Ride Motion
X

54
Robert D.CookConcepts and Applications of Finite Element AnalysisJohn Wiley & Sons1981
Roy R. Craig, Jr.Structural Dynamics: An Introduction to ComputerMethodsJohn Wiley & Sons1981
Clare D. McGillem, George R. CooperContinuous and Discrete Signal and System AnalysisHolt, Rinehart, and Winston, Inc.1974
Francis S. Tse, Ivan E. Morse, Rolland T. HinkleMechanical Vibrations: Theory and ApplicationsAllyn and Bacon, Inc.1978
D. Brown, G.Carbon, K. RamseySurvey of Excitation TechniquesApplicable to Automotive StructuresSociety of Automotive Engineers,#7700291977
R. J. Allemang, D. L. BrownA Correlation Coefficient for ModalVector AnalysisProceedings of the 1st InternationalModal Analysis Conference1982
R. J. Allemang, D. L. Brown, R. W. RostMultiple Input Estimation of Frequency Response FunctionsProceedings of the 2nd InternationalModal Analysis Conference1984
Dave Corelli, David L. BrownImpact Testing ConsiderationsProceedings of the 2nd InternationalModal Analysis Conference1984
Norm OlsenExcitation Functions for StructuralFrequency Response MeasurementsProceedings of the 2nd InternationalModal Analysis Conference1984
John R. Crowley, G. Thomas Rocklin, Albert L. Klosterman, Havard VoldDirect Structural Modification Using Frequency Response FunctionsProceedings of the 2nd InternationalModal Analysis Conference1984
D. L. Brown, R. J. Allemang, Ray Zimmerman, M. MergeayParameter Estimation Techniques for Modal AnalysisSociety of Automotive Engineers,#7902211979
Richard Jones, Yuji KobayashiGlobal Parameter Estimation Using Rational Fraction PolynomialsProceedings of the 4th InternationalModal Analysis Conference1986
Richard Jones, Kathleen IberleStructural Modification: A Comparison of TechniquesProceedings of the 4th InternationalModal Analysis Conference1986
Bibliography

55

Product specifications and descriptions in this document subject to change without notice.Copyright © 1997, 2000 Agilent Technologies Printed in U.S.A. 5/005954-7957E
Agilent Technologies' Test and MeasurementSupport, Services, and AssistanceAgilent Technologies aims to maximize the value you receive, while minimizing your risk and problems. We strive to ensure that you get thetest and measurement capabilities you paid forand obtain the support you need. Our extensivesupport resources and services can help you choose the right Agilent products for yourapplications and apply them successfully. Everyinstrument and system we sell has a global war-ranty. Support is available for at least five yearsbeyond the production life of the product. Twoconcepts underlie Agilent's overall support policy: "Our Promise" and "Your Advantage."
Our PromiseOur Promise means your Agilent test and measurement equipment will meet its advertisedperformance and functionality. When you arechoosing new equipment, we will help you withproduct information, including realistic perform-ance specifications and practical recommenda-tions from experienced test engineers. When you use Agilent equipment, we can verify that itworks properly, help with product operation, andprovide basic measurement assistance for the useof specified capabilities, at no extra cost uponrequest. Many self-help tools are available.
Your AdvantageYour Advantage means that Agilent offers a widerange of additional expert test and measurementservices, which you can purchase according toyour unique technical and business needs. Solveproblems efficiently and gain a competitive edgeby contracting with us for calibration, extra-costupgrades, out-of-warranty repairs, and on-siteeducation and training, as well as design, systemintegration, project management, and other professional engineering services. ExperiencedAgilent engineers and technicians worldwide canhelp you maximize your productivity, optimize thereturn on investment of your Agilent instrumentsand systems, and obtain dependable measurementaccuracy for the life of those products.
For More Assistance with Your Test & Measurement Needs go towww.agilent.com/find/assist
Or contact the test and measurement experts at Agilent Technologies (During normal business hours)
United States:(tel) 1 800 452 4844
Canada:(tel) 1 877 894 4414(fax) (905) 206 4120
Europe:(tel) (31 20) 547 2323(fax) (31 20) 547 2390
Japan:(tel) (81) 426 56 7832(fax) (81) 426 56 7840
Latin America:(tel) (305) 267 4245(fax) (305) 267 4286
Australia:(tel) 1 800 629 485 (fax) (61 3) 9272 0749
New Zealand:(tel) 0 800 738 378 (fax) 64 4 495 8950
Asia Pacific:(tel) (852) 3197 7777(fax) (852) 2506 9284


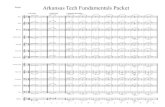










![The Fundamentals of Modal Testingliterature.cdn.keysight.com/litweb/pdf/5954-7957E.pdf · 2000. 9. 2. · MDOF impulse response/ free decay k1 k3 k2 k4 c1 c3 c2 4 m1 m2 m 3 [m]{x}](https://static.fdocument.org/doc/165x107/60d26ca59f186d32213cccdf/the-fundamentals-of-modal-2000-9-2-mdof-impulse-response-free-decay-k1-k3.jpg)



