Tds Correction
13
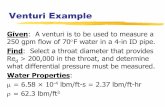
Q.1. Graphe d’analyse 1 0 2 3 4 5 G(O 0 , 1 y ) P(O 2 , 1 y ) G(O 2 , 2 x ) P(O 4 , 4 z ) Rotule non parfaite en O 3 3 / 5 ) 3 5 ( . 3 Ω − = → λ O M P(O * , 0 x ) 0 1 1 1 0 ). . . ( y Y b Y k F − − = → 0 * * 5 0 ). . . ( x b k C β β − − = → 4 4 3 .z C C m = → 1 ... ... ... ... 0 ... 0 b O paramètre Y 1 ... 0 ... ... ... ... 2 b O paramètre 2 ... ... ... ... ... 0 2 b O paramètre X 4 0 ... ... ... ... ... 4 b O paramètre (loi programmée) 0 ... ... 0 ... ... ... 2 b O paramètre Q.2. Fermeture géométrique : 5 0 5 * * 0 O O O O O O = + 5 3 3 2 2 1 1 0 5 * * 0 O G G O O O O O O O O O + + + = + 2 3 2 1 1 1 5 5 0 0 . . . . . . x l x X x l y Y z l x d + + + = + En projection dans la base 0 : + − = = − + + = θ β β θ sin ). ( cos . sin . cos ). ( 3 5 5 3 1 0 l X l Y l l X l d 2 x 1 0 z z = 1 y = 2 y = 0 y 2 z 1 0 x x = 0 z 0 y 5 z 5 0 x x = 5 y Q.3. Hypothèse et petits + − = = − + + = θ β ). ( . ) ( 3 5 5 3 1 0 l X l Y l l X l d Soit β . 5 l Y − = ; cte l l d X = − − = 3 1 0 ; cte l X l = + − = 3 5 θ Q.4. On a liaison 5/3 : liaison rotule non parfaite 3 composantes X 53 , Y 53 et Z 53 + une loi de comportement : 3 / 5 ) 3 5 ( . 3 Ω − = → λ O M avec 0 3 / 0 0 / 5 3 / 5 .x β = Ω − Ω = Ω Soit 2 2 0 ) 3 5 ( . cos . sin . . . 3 x z x M O θ θ λ β λ + − = − = → { } ) 2 ( 53 53 53 3 5 sin . . 0 cos . . 3 b O Z Y X F = → θ β λ θ β λ . 2 x 1 0 z z = 1 y = 2 y = 0 y 2 z 1 0 x x =
-
Upload
zakaria-wasfi -
Category
Documents
-
view
272 -
download
0
description
sii
Transcript of Tds Correction
-
Q.1. Graphe danalyse
1
0
2
3 4
5
G(O0, 1y )
P(O2, 1y )
G(O2, 2x )
P(O4, 4z )
Rotule non parfaite en O3 3/5)35( .3 = OM
P(O*, 0x )
01110 )...( yYbYkF=
0**
50 )...( xbkC =
443 .zCC m
=
1.........
...0...
0 bO
paramtre Y
1...0...
...
...
...
2 bO
paramtre
2.........
...
...0
2 bO
paramtre X
40......
...
...
...
4 bO
paramtre (loi programme)
0......0
...
...
...
2 bO
paramtre
Q.2. Fermeture gomtrique : 505
**0 OOOOOO =+
533221105**
0 OGGOOOOOOOOO +++=+ 2321115500 ...... xlxXxlyYzlxd
+++=+ En projection dans la base 0 :
+=
=
++=
sin).(cos.sin.
cos).(
35
5
310
lXlYl
lXld
2x
10 zz
= 1y
= 2y
= 0y
2z
10 xx
=
0z
0y
5z
50 xx
=
5y
Q.3. Hypothse et petits
+=
=
++=
).(.
)(
35
5
310
lXlYl
lXld
Soit .5lY = ; ctelldX == 310 ; ctelXl
=+
=3
5
Q.4. On a liaison 5/3 : liaison rotule non parfaite 3 composantes X53, Y53 et Z53 + une loi de comportement : 3/5)35( .3 = OM avec 03/00/53/5 .x
==
Soit 220)35( .cos.sin...3 xzxMO +==
{ }
)2(53
53
53
35
sin..0cos..
3 bOZYX
F
=
.
2x
10 zz
= 1y
= 2y
= 0y
2z
10 xx
=
-
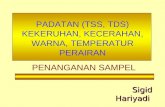
Q.1.
t (s) 0,25
2rd/s2 Acclration )(t
0,5 0,75 1
-2rd/s2
Q.2.
2 1 3 0
3.........
0......
3 bO
paramtre z
10......
...
...
...
1 bO
paramtre
Pesanteur
P(O1, 0z ) P(O2, 0z
) G(O3, 0z )
20......
...
...
...
2 bO
paramtre
Pesanteur
Actionneur ? Actionneur 01.zC
Actionneur 012.zC
Q.3. 322131 OOOOOO += 02131 ... zzxLxLOO
++=
On projette les axes dans la base dans laquelle on exprime les coordonnes x0, y0 et z0 : 02131 ... zzxLxLOO
++= avec 001 .sin.cos yxx
+= et ( ) ( ) 002 .sin.cos yxx
+++=
( )( ) ( )( ) 00031 ..sin.sin..cos.cos. zzyLLxLLOO
++++++=
Ce qui permet dcrire le modle gomtrique direct : ( )( )
=
++=++=
zzLLyLLx
0
0
0sin.sin.cos.cos.
Q.4. Il faut inverser le modle gomtrique direct : ( )( )
=
++=++=
zzLLyLLx
0
0
0sin.sin.cos.cos.
Une solution possible consiste utiliser les transformations trigonomtriques de sommes en produits
(formules de Simpson : 2
cos.2
cos.2coscos bababa +=+ et 2
cos.2
sin.2sinsin bababa +=+ )
qui permettent de transformer le modle gomtrique direct :
( )( )
++=
++=
sin.sin.cos.cos.
0
0
LLyLLx
+=
+=
2cos.
2.2sin..2
2cos.
2.2cos..2
0
0
Ly
Lx
-
En faisant 202
0 yx + pour faire apparaitre un terme en BA22 sincos + , on obtient :
2cos..4
2.2sin
2.2cos.
2cos..4 22222220
20
=
++
+=+ LLyx
Lyx
.22cos
20
20 +=
En faisant 0
0
xy , on a :
2.2tan
0
0 +=xy ce qui permet dobtenir :
0
0arctan2 x
y+=
Ce qui permet dcrire le modle gomtrique indirect :
=
+=
+=
0
20
20
0
0
.2arccos.2
arctan2
zzL
yxxy
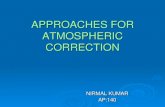
Q.5. Trajectoire rectiligne suivant laxe ),( 01 xO
Le modle gomtrique indirect devient :
=
=
=
0
0
.2arccos.2
2
zzL
x
Sur le schma on voit bien que L
x.2
cos 0= et
que 2
=
1x
0x
0y
1
3
0
3x
O1
O2
O3
2 x0
x0/2 L
L
Course des moteurs : L < O1O3 < 1,5.L L < x0 < 1,5.L
Pour x0 = L 3.2
21arccos.2 ==
32
==
Pour x0 = 1,5.L = 8243arccos.2 = 41
2
Ce qui est conforme aux dbattements admissibles du C.d.C.F. pour cette phase de vie : 0 < 2 et
3.2
< 2 .
Q.6.
=
=
=
0
0
.2cos
2cos
2
zzL
x
=
=
=
0
0
.22sin
2
2
zzL
x
Q.7. Pour t = 0,75 s on a 0x = 0,25 m.s
-1, 0x = 0,729 m, = 0,365 rd.s-1 et = 0,754 rd.
Lx.22
sin2
0 =
Lx.2
sin. 0 = A.N. : 25,0745,0sin.365,0 = et 25,05,02
25,0.20 =
=
Lx lgalit
est bien respecte.
-
Q.1. Lensemble 2 = bras pivotant + 2 outils monts symtriquement possde 2 plans de symtrie
perpendiculaires la matrice dinertie de lensemble est diagonale
)1(00
0000
)2(1
b
O
CB
AI
=
On dcompose en solides lmentaires
la matrice dinertie de la plaque de centre de gravit O1 est :
( )
( )
( ))1(
22
22
22
.12
00
0.12
0
00.12
)(1
b
O
ecm
bem
cbm
SI
+
+
+
=
b1 est ici base principale.
Un outil + son porte outil constitue lensemble E de centre de gravit G et sa matrice dinertie est :
)1(00
0000
)(
bzz
yy
xx
G
II
IEI
=
Il faut transporter la matrice dinertie en O1 pour faire lassemblage. (Seuls les termes diagonaux sont calculer puisque la matrice finale est diagonale).
2. Gxx ymIA += 2. Gyy xmIB +=
).( 22 GGzz xymIC ++= On assemble la mes matrices exprimes dans la mme base et au mme point.
( )
( )
( ))1(
2222
222
222
).(.2.2.12
00
0..2.2.12
0
00..2.2.12
)2(1
bGGzz
Gyy
Gxx
O
xymIecm
xmIbem
ymIcbm
I
++++
+++
+++
=
-
Q.2. Lensemble 2 = bras pivotant + 1 outil possde 1 plan de symtrie (plan (O1, 11, yx )) Laxe
(O1, 1z ) est axe principal dinertie D = E = 0
)1(00
00
)2(1
b
O
CBFFA
I
=
On dcompose en solides lmentaires
la matrice dinertie de la plaque de centre de gravit O1 reste la mme que question 1.
Un outil + son porte outil constitue lensemble E de centre de gravit G et sa matrice dinertie est :
)1(00
0000
)(
bzz
yy
xx
G
II
IEI
=
Il faut transporter la matrice dinertie en O1 pour faire lassemblage.
)()()(11
GmIEISI OGO += avec :
)1(
22
2
2
)(000.0.
.)(1
bGG
GGG
GGG
O
xyxyxyxy
mGmI
+
=
)1(
22
2
2
).(000...0...
)(
bGGzz
GyyGG
GGGxx
G
xymIxmIyxmyxmymI
EI
++
+
+
=
On assemble la mes matrices exprimes dans la mme base et au mme point.
( )
( )
( ))1(
2222
222
222
).(.12
00
0..12
..
0....12
)2(1
bGGzz
GyyGG
GGGxx
O
xymIecm
xmIbemyxm
yxmymIcbm
I
++++
+++
+++
=
-
Q.1. Recherche des centres de gravit :
zLcOG ).2
(1 += xazlbcOG .).2
(2 += xazlbcOG .).2
(3 ++=
Q.2. Solide 1 :
)(1
1
1
000000
)1(1
b
G
CB
AI
= Solides 2 et 3 :
)(23
23
23
000000
)3()2(32
b
GG
CB
AII
==
Q.3. Mt = M + 2.m Recherche du centre de gravit Gt : Le systme possde 2 plans de symtrie perpendiculaires xGt = yGt = 0 On utilise ensuite la formule du barycentre =
iitt iOGmOGM .. projete sur laxe z
:
=i
GiiGtt zmzM .. )2(.2)
2.(. lbcmLcMzM Gtt +++=
tGt M
lbcmLcMz
)2
(.2)2
.( +++=
Q.4. zzOG Gtt.= zLcOG ).
2(1 += xaz
lbcOG .).2
(2 += xazlbcOG .).2
(3 ++=
Le systme possde 2 plans de symtrie perpendiculaires la matrice est diagonale
)(00
0000
)321(1
b
O
IzzIyy
IxxI
=++
On dcompose en solides lmentaires
Solide 1 :
)(1
1
1
000000
)1(1
b
G
CB
AI
=
Il faut transporter la matrice dinertie en Gt pour faire lassemblage.
On a zLczzOGOGGG ttt ).
2(.11 ++=+=
(Seuls les termes diagonaux sont calculer puisque la matrice finale est diagonale).
Solides 2 et 3 :
)(23
23
23
000000
)3()2(32
b
GG
CB
AII
==
Il faut transporter la matrice dinertie en Gt pour faire lassemblage.
On a xazlbczzOGOGGG ttt .).
2(.22 ++=+= et
xazlbczzOGOGGG ttt .).
2(.33 +++=+=
(Seuls les termes diagonaux sont calculer puisque la
-
)(00
0000
)1(
b
G
CB
AI
t
= avec :
21 )2
.( tzLcmAA ++=
21 )2
.( tzLcmBB ++=
1CC =
matrice finale est diagonale).
)(2
2
2
000000
)2(
b
G
CB
AI
t
=
)(3
3
3
000000
)3(
b
G
CB
AI
t
=
2
232 )2.( tz
lbcmAA ++=
22232 .)2
.( amzlbcmBB t +++= 2
232 .amCC +=
22
233 )2.( AzlbcmAA t =++=
222
233 .)2.( BamzlbcmBB t =+++=
22
233 . CamCC =+=
On assemble la mes matrices exprimes dans la mme base et au mme point :
)(2
2
2
.2000.2000.2
)2(1
b
O
CCBB
AAI
+
+
+
=
Q.5. Le mode de combustion dans les 3 tages permet de conserver la position du centre de gravit : le propergol est brul par cercle concentrique dans chacun des tages. Seules M et m varient dans le temps (et les valeurs numriques des matrices dinertie aussi par consquent).
-
Q.1. Calculer les matrices dinertie aux centres de gravit respectifs des solides lmentaires suivants : Cylindre plein de masse m, de longueur L et de rayon R. Symtrie de rvolution daxe (O, z ).
z
O
G
(S)
y
x
),,(
2
22
22
2.00
0124
.0
00124
.
)(
zyx
G
Rm
LRm
LRm
SI
+
+
=
Disque de masse m, de rayon R et dpaisseur e ngligeable. Symtrie de rvolution daxe (O, z ).
z
(S) y
x
G
),,(
2
2
2
2.00
04.0
004.
)(
zyx
G
Rm
Rm
Rm
SI
=
Tige rectiligne de masse m, de longueur L et de rayon r
-
Plaque de masse m, de dimensions a,b et dpaisseur e ngligeable. z
y
x
O
G
(S)
a
b
( )
),,(
2
2
22
12.00
012.0
00.12
)(
zyx
G
bm
am
bam
SI
+
=
Sphre pleine, masse m et rayon R
z
y
x
G
(S)
),,(
2
2
2
5..200
05..20
005..2
)(
zyx
G
Rm
Rm
Rm
SI
=
-
Figures gomtrales :
1z
1x
10 zz
=
0y
2y
3x
3z
2x
2z
2y
= 3y
0x
1y
21 xx
= 1y
2z
Q.1. Le plan ( )11,, zyO
est un plan de symtrie pour le sous ensemble 1 ( )1, xO axe principal
dinertie
),,,(00
00)1(
111111
11
1
1
zyxGCDDB
AI G
=
Q.2. 1/0 : Mouvement de rotation autour dun axe fixe + matrice dinertie donne en G1 (centre de
gravit) : { }
=
==
0/110/1,
0/1,10/10/1 ).(
.
11
1
1SIVmR
GG
GC
G
avec :
110/1,10/1 .... 1 xamVmR GC
==
11111
111111
11
1
0/110/1, ......
),,,(00
00).(
11zCyDz
zyxGCDDB
ASIGG
+=
==
On dplace le moment cintique en O : 1110/1,0/110/1,0/1, ....11 xamyaROG GCGO
+=+=
1
2111110/1, .......1 zamzCyDO
++=
{ }
++
=
12
1111
110/1 .).(..
...zamCyD
xam
O
Q.3. Les plans ( )22 ,, yxI
et ( )22 ,, zyI sont des plans de symtrie pour le solide 2 la matrice est
diagonale
),,,(000000
)2(
2222
2
2
zyxICB
AI I
=
Q.4. 2/0 : Mouvement quelconque + matrice dinertie donne en I (centre de gravit) :
{ }
=
==
0/220/2,
0/2,20/20/2 ).(
.SI
VmR
II
IC
I
avec :
120/2,20/2 .... xRmVmR IC
==
-
)..cos..sin..(
),,,(000000
).( 222
2222
2
2
0/220/2, xzy
zyxICB
ASIII
++
==
2222220/2, .cos...sin.... zCyBxAI
++=
{ }
++=
222222
120/2 .cos...sin....
...zCyBxA
xRm
I
Q.5. 3/0 : Mouvement quelconque + matrice dinertie donne en I (centre de gravit) :
{ }
=
==
0/330/3,
0/3,30/30/3 ).(
.SI
VmR
II
IC
I
avec :
130/3,30/3 .... xRmVmR IC
==
)..cos.).sin..((
),,,(000000
).( 222
2223
3
3
0/330/3, xzy
zyxICB
ASIII
+++
==
2323230/3, .cos..).sin..(.. zCyBxAI
+++=
{ }
+++=
232323
130/3 .cos..).sin..(..
...zCyBxA
xRm
I
Q.6. Au point I on a : { } { } { }0/30/20/1 +=E avec :
{ }
+++=
232323
130/3 .cos..).sin..(..
...zCyBxA
xRm
I
et
{ }
++=
222222
120/2 .cos...sin....
...zCyBxA
xRm
I
Q.7. { }
=
=0/1,
0/1,10/10/1
1.
O
Gd
O
mR
Avec 1
21110/1 ...... yamxamRd
=
O point fixe de 0 : 12
1112
1110
0/1,0/1, .).(.... zamCxDyDdtd
OO
+++==
{ }
+++
=
12
1112
111
12
1110/1 .).(....
......zamCxDyD
yamxam
O
-
Q.8. On dcompose en sous systme lmentaires : { } { } { } { }0/30/20/10/2 ++=E 0/3,0/2,0/1,0/, 2 OOOEO ++=
Calcul question 8
0/2,I calcul question 4
00/2,0/2, II dt
d = car I centre de gravit
0/20/2,0/2, dOO ROI +=
0/3,I calcul question 5
00/3,0/3, II dt
d = car I centre de gravit
0/30/3,0/3, dOO ROI +=
Figures gomtrales :
1z
1x
10 zz
=
0y
2y
0x
1y
21 xx
= 1y
2z
Q.1. 222210/2 ..cos..sin... xzyxz
++=+=
)..cos..sin..(
),,(000000
).2( 222
2222
2
2
0/20/2, 22xzy
zyxCB
AIGG
++
==
2222220/2, .cos...sin....2 zCyBxAG
++=
Q.2. 0
0/2,0/2, 22 GG dtd = car G2 centre de gravit.
02222
220
2222220
22220/2,
.cos...sin...
.cos...sin...cos....sin......2
zdtdCzC
zCydtdByByBx
dtdAxAG
+
+++++=
Avec : 10
2 .yxdtd =
222212
20
2 ..cos.)..( zxyxzydtdy
dtd
+=++=
-
222212
20
2 ..sin.)..( yxzxzzdtdz
dtd
=++=
Q.3. On a 0= , 0= et B2 = C2
)..sin..(cos...sin....cos..
)..cos..(sin...cos....sin.......
2222222
222222212220/2,2
yxCzCzC
zxByByByAxAG
++
+++++=
Devient :
)..sin..(cos..
.sin...)..cos..(sin...cos......
222
2222222120/2,2
yxB
zBzxByByAG
+
+++=
12120/2, ......2 yAyAG ==
Q.4. On isole le solide 2 et on applique le thorme du moment dynamique au point G2:
11121212 ....... zNyMxCxCyA ventmoteur
+++= projection sur 1y : MA =..2
Si = cte >0 et = cte >0 lavion pique !