Stability investigation of the Generalised-α time integration method for dynamic coupled...
13
Research Paper Stability investigation of the Generalised-a time integration method for dynamic coupled consolidation analysis Bo Han ⇑ , Lidija Zdravkovic, Stavroula Kontoe Dept. of Civil & Environmental Engineering, Imperial College London, London SW7 2AZ, UK article info Article history: Received 28 May 2014 Received in revised form 10 November 2014 Accepted 12 November 2014 Keywords: Stability condition CH method Dynamic analysis Finite element method Coupled formulation abstract In this paper, the stability of the Generalised-a time integration method (the CH method) for a fully coupled solid-pore fluid formulation is analytically investigated for the first time and the corresponding theoretical stability conditions are proposed based on a rigorous mathematical derivation process. The proposed stability conditions simplify to the existing ones of the CH method for the one-phase formula- tion when the solid–fluid coupling is ignored. Furthermore, by degrading the CH method to the Newmark method, the stability conditions are in agreement with the ones proposed in previous stability investiga- tions on coupled formulation for the Newmark method. The analytically derived stability conditions are validated with finite element (FE) analyses considering a range of loading conditions and for various soil permeability values, showing that the numerical results are in agreement with the theoretical investiga- tion. Then, the stability characteristics of the CH method are explored beyond the limits of the theoretical investigation, assuming elasto-plastic soil behaviour which is prescribed with a bounding surface plastic- ity constitutive model. Since the CH method is a generalisation of a number of other time integration methods, the derived stability conditions are relevant for most of the commonly utilised time integration methods for the two-phase coupled formulation. Ó 2014 Elsevier Ltd. All rights reserved. 1. Introduction In dynamic FE analysis, time integration schemes have been widely and successfully used to solve the second order governing equation of motion, as they can incorporate both material and geo- metric nonlinearities. Since 1950s, various time integration meth- ods have been proposed, such as the Newmark [14], HHT [6], WBZ [22] and Generalised-a methods (CH method) of Chung and Hul- bert [4], which have been widely implemented into FE programs and successfully utilised to solve numerically the equation of motion for one-phase materials. The CH method satisfies the main requirements for an efficient time marching algorithm, which include unconditional stability for linear problems, second order accuracy and controllable numerical dissipation in the high fre- quency range [5]. The role of numerical damping is to eliminate spurious high-frequency oscillations that are introduced into the solution due to poor spatial representation of the high-frequency modes. Depending on the range of soil permeability and dynamic load- ing duration, it is often necessary to employ coupled consolidation analysis to accurately model the two-phase soil behaviour. Dynamic analyses are further complicated by the presence of the inertia forces of the different phases (i.e. solid skeleton and pore water) and the coupling between them. Hence, the formulation of the CH method was extended by Kontoe [8] and Kontoe et al. [11] to enable the solution of dynamic coupled consolidation problems and was implemented in the FE program ICFEP (Imperial College Finite Element Program) [16]. Over the last decade the CH method has been used for the dynamic analysis of geotechnical problems involving both one-phase (e.g. [11,9,13]) and two-phase formula- tions [18]. The key feature of unconditional stability of this method has been comprehensively investigated by previous studies, both analytically and numerically, but only for the one-phase formula- tion [4]. The two-phase coupled FE formulation requires an addi- tional equation (the dynamic consolidation equation) and an additional unknown (pore water pressure). Aiming to solve two dynamic coupled equations (i.e. the equation of motion and the consolidation equation), the time integration method is applied to both equations. This not only increases the complexity of the imple- mentation, but it also changes the numerical features of the time integration method. Therefore, the numerical stability of the CH http://dx.doi.org/10.1016/j.compgeo.2014.11.006 0266-352X/Ó 2014 Elsevier Ltd. All rights reserved. ⇑ Corresponding author. E-mail addresses: [email protected] (B. Han), [email protected] (L. Zdravkovic), [email protected] (S. Kontoe). Computers and Geotechnics 64 (2015) 83–95 Contents lists available at ScienceDirect Computers and Geotechnics journal homepage: www.elsevier.com/locate/compgeo
Transcript of Stability investigation of the Generalised-α time integration method for dynamic coupled...

Computers and Geotechnics 64 (2015) 83–95
Contents lists available at ScienceDirect
Computers and Geotechnics
journal homepage: www.elsevier .com/locate /compgeo
Research Paper
Stability investigation of the Generalised-a time integration methodfor dynamic coupled consolidation analysis
http://dx.doi.org/10.1016/j.compgeo.2014.11.0060266-352X/� 2014 Elsevier Ltd. All rights reserved.
⇑ Corresponding author.E-mail addresses: [email protected] (B. Han), [email protected]
(L. Zdravkovic), [email protected] (S. Kontoe).
Bo Han ⇑, Lidija Zdravkovic, Stavroula KontoeDept. of Civil & Environmental Engineering, Imperial College London, London SW7 2AZ, UK
a r t i c l e i n f o a b s t r a c t
Article history:Received 28 May 2014Received in revised form 10 November 2014Accepted 12 November 2014
Keywords:Stability conditionCH methodDynamic analysisFinite element methodCoupled formulation
In this paper, the stability of the Generalised-a time integration method (the CH method) for a fullycoupled solid-pore fluid formulation is analytically investigated for the first time and the correspondingtheoretical stability conditions are proposed based on a rigorous mathematical derivation process. Theproposed stability conditions simplify to the existing ones of the CH method for the one-phase formula-tion when the solid–fluid coupling is ignored. Furthermore, by degrading the CH method to the Newmarkmethod, the stability conditions are in agreement with the ones proposed in previous stability investiga-tions on coupled formulation for the Newmark method. The analytically derived stability conditions arevalidated with finite element (FE) analyses considering a range of loading conditions and for various soilpermeability values, showing that the numerical results are in agreement with the theoretical investiga-tion. Then, the stability characteristics of the CH method are explored beyond the limits of the theoreticalinvestigation, assuming elasto-plastic soil behaviour which is prescribed with a bounding surface plastic-ity constitutive model. Since the CH method is a generalisation of a number of other time integrationmethods, the derived stability conditions are relevant for most of the commonly utilised time integrationmethods for the two-phase coupled formulation.
� 2014 Elsevier Ltd. All rights reserved.
1. Introduction
In dynamic FE analysis, time integration schemes have beenwidely and successfully used to solve the second order governingequation of motion, as they can incorporate both material and geo-metric nonlinearities. Since 1950s, various time integration meth-ods have been proposed, such as the Newmark [14], HHT [6], WBZ[22] and Generalised-a methods (CH method) of Chung and Hul-bert [4], which have been widely implemented into FE programsand successfully utilised to solve numerically the equation ofmotion for one-phase materials. The CH method satisfies the mainrequirements for an efficient time marching algorithm, whichinclude unconditional stability for linear problems, second orderaccuracy and controllable numerical dissipation in the high fre-quency range [5]. The role of numerical damping is to eliminatespurious high-frequency oscillations that are introduced into thesolution due to poor spatial representation of the high-frequencymodes.
Depending on the range of soil permeability and dynamic load-ing duration, it is often necessary to employ coupled consolidationanalysis to accurately model the two-phase soil behaviour.Dynamic analyses are further complicated by the presence of theinertia forces of the different phases (i.e. solid skeleton and porewater) and the coupling between them. Hence, the formulation ofthe CH method was extended by Kontoe [8] and Kontoe et al. [11]to enable the solution of dynamic coupled consolidation problemsand was implemented in the FE program ICFEP (Imperial CollegeFinite Element Program) [16]. Over the last decade the CH methodhas been used for the dynamic analysis of geotechnical problemsinvolving both one-phase (e.g. [11,9,13]) and two-phase formula-tions [18]. The key feature of unconditional stability of this methodhas been comprehensively investigated by previous studies, bothanalytically and numerically, but only for the one-phase formula-tion [4]. The two-phase coupled FE formulation requires an addi-tional equation (the dynamic consolidation equation) and anadditional unknown (pore water pressure). Aiming to solve twodynamic coupled equations (i.e. the equation of motion and theconsolidation equation), the time integration method is applied toboth equations. This not only increases the complexity of the imple-mentation, but it also changes the numerical features of the timeintegration method. Therefore, the numerical stability of the CH

84 B. Han et al. / Computers and Geotechnics 64 (2015) 83–95
method needs to be investigated rigorously for two-phase coupledproblems.
In this paper, the stability of the CH method for the coupled for-mulation is systematically investigated for the first time and thecorresponding theoretical stability conditions are derived. The ana-lytically derived stability conditions are validated by FE analysesand the stability characteristics of the CH method are furtherinvestigated considering a range of loading conditions, modelgeometries and constitutive models. Furthermore, since the CHmethod is a generalisation of the Newmark, HHT and WBZ meth-ods, the stability investigation of the CH method for the two-phasecoupled formulation is relevant for most of the commonly utilisedtime integration methods.
2. The CH method for the coupled dynamic formulation
The principle of the CH method is that the acceleration, velocity,displacement and pore fluid pressure terms are evaluated at differ-ent instances within a time step, Dt, controlled by integrationparameters am and af (shown in Eq. (1)). The variations of velocityand displacement within a time step for the CH method areapproximated by Newmark’s equations, governed by the integra-tion parameters a and d (shown in Eq. (2)). Kontoe [8] and Kontoeet al. [11] showed that the final dynamic FE coupled consolidationformulation for the CH method can be described by Eq. (3) (signconvention: tension positive), where five integration parameters,am, af, a, d and b, are involved. It should be noted that b is the inte-gration parameter of a time marching scheme which is employedin ICFEP to solve the integrals of the consolidation equation, asshown in (4) [16]. In particular, as illustrated in Fig. 1, the porefluid integral on the left hand side of Eq. (4) is represented bythe grey area, which can be approximated by the hatched areathrough adopting the time marching scheme. Based on the princi-ple of this time marching scheme, the b values should be boundedbetween 0 and 1. Furthermore, according to Booker and Small [2],in order to ensure the stability of the employed time marchingscheme for static consolidation problems, b should be equal or lar-ger than 0.5.
€dtkþ1�am¼ ð1� amÞ � €dtkþ1
þ am � €dtk
_dtkþ1�af¼ ð1� af Þ � _dtkþ1
þ af � _dtk
dtkþ1�af¼ ð1� af Þ � dtkþ1
þ af � dtk
ptkþ1�af¼ ð1� af Þ � ptkþ1
þ af � ptk
tkþ1�am ¼ ð1� amÞ � tkþ1 þ am � tk
tkþ1�af¼ ð1� af Þ � tkþ1 þ af � tk
8>>>>>>>>>>>>>>><>>>>>>>>>>>>>>>:
9>>>>>>>>>>>>>>>=>>>>>>>>>>>>>>>;
ð1Þ
Fig. 1. Approximation of pore water pressure integral (after Potts and Zdravkovic[16]).
D _d ¼ da � Dt
� Dd� da� _dtkþ 1� d
2a
� �� Dt � €dtk
D€d ¼ 1a � Dt2 � Dd� 1
a � Dt� _dtk� 1
2a� €dtk
ð2Þ
1�ama�Dt2
� �½M� þ ð1�af Þ�d
a�Dt
� �½C� þ ð1� af Þ½K� ð1� af Þ½L�
ð1�amÞ�ba�Dt ½G� þ ð1� af Þ½L�T ð1� af Þ � ð�bDt½U� � ½S�Þ
24
35
fDdgfDpg
� �¼ DR
DF
" #ð3Þ
Z tkþDt
tk
fpgdt ¼ ½fptkg þ b � fDpg� � Dt
¼ ½b � fptkþ1g þ ð1� bÞ � fptk
g� � Dt ð4Þ
The coupled dynamic formulation (Eq. (3)) was derived basedon the dynamic equilibrium of the solid–fluid mixture, the conti-nuity equation of the pore fluid flow and the generalised Darcy’slaw. In the above equations, [M], [C], [K], [L], [U] and [S] are the glo-bal mass, damping, stiffness, coupling, permeability and watercompressibility matrices respectively, and €d, _d, d, and p representthe nodal acceleration, velocity, displacement and pore fluid pres-sure variables respectively. It should be noted that the matrix [G]in Eq. (3) represents the impact of the inertia of the solid on thepore fluid pressure. It has been though suggested that the influenceof the matrix [G] on the dynamic response is insignificant for thefrequency range within which the ‘‘u-p’’ formulation is valid [3].Therefore, the matrix [G] is not taken into account in the dynamiccoupled formulation for the work presented herein. Furthermore,the matrices and the right hand side terms of Eq. (3) are detailedin Appendix A.
3. Stability investigation of the CH method for the coupledformulation
Since the stability of a time integration method is a key numer-ical feature, researchers have extensively investigated the stabilityof the widely used time integration methods, i.e. Newmark [14],Hilber et al. [6], Wood et al. [22] and Chan [3]. As an increasinglywidely employed time integration method, the stability of the CHmethod was also studied by Chung and Hulbert [4], but only forthe one-phase formulation. In this part, the stability of the CHmethod for a fully coupled dynamic consolidation formulation issystematically investigated and the unconditional stability condi-tions are proposed.
The stability investigation presented in this section follows afour-step procedure. First, the accumulated scalar form of the cou-pled dynamic formulation is derived based on the FE formulationpresented in the previous section. Second, the expressions of theNewmark method for the variation of velocity and displacementwithin a time step are utilised in the accumulated scalar form ofthe coupled dynamic formulation. Third, the approximations ofthe CH method for various variables are employed in the dynamicformulation. Last, the stability of the CH method is investigatedbased on the derived formulation which includes only two vari-ables: the incremental acceleration and pore fluid pressure.
According to Bathe [1], a time integration method is consideredstable when it produces a numerical solution which remainsalways bounded. The fundamental assumption of the time integra-tion method is that the acceleration, velocity and displacement at aspecific increment can be expressed as a function of these variablesat previous increments, as shown in Eq. (5), where [A] is the ampli-fication matrix controlling the stability, accuracy and other numer-ical features of the considered time integration method. Based on

B. Han et al. / Computers and Geotechnics 64 (2015) 83–95 85
the definition of numerical stability, for a time integration methodto be stable, the matrix [A] should be bounded. Therefore, the mod-ulus of the eigenvalues of matrix [A] should be less or equal to one,expressed by Eq. (6), where q is the spectral radius of the matrix[A] and k1, k2 and k3 are the eigenvalues of the matrix [A]. TheRouth–Hurwitz condition, which has been widely employed inthe stability analysis of various time integration methods [21], isadopted in this study. In particular, it is suggested by Routh [17]and Hurwitz [7] that, if k is substituted by a function of a complexnumber z (as shown in Eq. (7)), the condition of jkj 6 1 can be con-verted to the condition of Re(z) 6 0, indicating that the real part ofz should be less or equal to zero in order to satisfy the stability con-dition. Furthermore, for a general polynomial of the form shown inEq. (8) to satisfy the condition of Re(z) 6 0, the conditions of Eqs.(9) and (10) should be satisfied. Therefore, the stability conditionof jkj 6 1 is finally converted to the conditions given by Eqs. (9)and (10), which will be used for the following stability analysisof the CH method.
€dtkþ1
_dtkþ1
dtkþ1
8>>>><>>>>:
9>>>>=>>>>;¼ ½A�
€dtk
_dtk
dtk
8>>><>>>:
9>>>=>>>;
ð5Þ
qðAÞ ¼ max jk1j; jk2j; jk3jf g 6 1; ð6Þ
k ¼ 1þ z1� z
ð7Þ
a0 � zn þ a1 � zn�1 þ a2 � zn�2 þ . . . an ¼ 0 ð8Þa0 > 0 and ai P 0 for i > 0 ð9Þa1 � a2 � a3 � a0 � a2
3 � a4 � a21 > 0 ð10Þ
3.1. Scalar form of the coupled dynamic FE formulation
In order to analyse the stability of the CH method, it is simplerto use the accumulated scalar form of the coupled dynamic formu-lation. For the equation of motion, the accumulated scalar formafter utilising the CH method is shown in Eqs. (11) and (12), wherem, c, k and l are the scalar forms of the matrices [M], [C], [K] and [L]respectively. Furthermore, the scalar form of the consolidationequation is shown in Eq. (13), where u and s are the scalar formsof the matrices [U] and [S].
m � €dtkþ1�amþ c � _dtkþ1�af
þ k � dtkþ1�afþ l � ptkþ1�af
¼ 0 ð11Þ
€dtkþ1�am
_dtkþ1�af
dtkþ1�af
ptkþ1�af
8>>>>>>>>><>>>>>>>>>:
9>>>>>>>>>=>>>>>>>>>;¼
ð1� amÞ � €dtkþ1þ am � €dtk
ð1� af Þ � _dtkþ1þ af � _dtk
ð1� af Þ � dtkþ1þ af � dtk
ð1� af Þ � ptkþ1þ af � ptk
8>>>>>>><>>>>>>>:
9>>>>>>>=>>>>>>>;
ð12Þ
�ð1�af Þ �u � ðpkþb �DpÞ�ð1�af Þ � s �DpDtþð1�af Þ � lT �Dd
Dt¼0 ð13Þ
3.2. Application of the expressions of the Newmark method
Based on the fundamental principle of the time integrationmethod, the acceleration, velocity and displacement at timeincrement tk+1 can be expressed as a function of their historic val-ues, as shown in Eq. (14) after employing the Routh–Hurwitzcondition.
€dtkþ1
_dtkþ1
dtkþ1
ptkþ1
8>>>><>>>>:
9>>>>=>>>>;¼ 1þ z
1� z
€dtk
_dtk
dtk
ptk
8>>>><>>>>:
9>>>>=>>>>;
ð14Þ
The left hand side of Eq. (14) is rewritten in incremental formemploying the expressions of the Newmark method (see Eq. (2))for displacement and velocity.
€dtkþ1
_dtkþ1
dtkþ1
ptkþ1
8>>>><>>>>:
9>>>>=>>>>;¼
€dtkþ D€d
_dtkþ €dtk
� Dt þ d � D€d � Dt
dtkþ _dtk
� Dt þ 0:5€dtk� Dt2 þ a � D€d � Dt
ptkþ Dp
8>>>>><>>>>>:
9>>>>>=>>>>>;
ð15Þ
By substituting Eq. (14) into Eq. (15), the acceleration, velocity, dis-placement and pore fluid pressure at the time instant tk can beexpressed as follows.
€dtk
_dtk
dtk
ptk
8>>>><>>>>:
9>>>>=>>>>;¼
1�z2z � D€d
ð1�zÞ�½1þð2d�1Þ�z�4z2 � D€d � Dt
ð1�zÞ�½1þð2d�1Þ�zþð4a�2dÞ�z2 �8z3 � D€d � Dt2
1�z2z � Dp
8>>>>><>>>>>:
9>>>>>=>>>>>;
ð16Þ
3.3. Application of the CH method
In order to perform the stability analysis of the CH method, Eqs.(14) and (16) are substituted into the equations for the CH method(Eq. (12)), giving the final expressions of acceleration, velocity, dis-placement and pore fluid pressure:
€dtkþ1�am
_dtkþ1�af
dtkþ1�af
ptkþ1�af
8>>>>><>>>>>:
9>>>>>=>>>>>;¼
ð1�2amÞ�zþ12z �D€d
ð2d�1Þ�ð1�2af Þ�z2þð2d�2af Þ�zþ14z2 �D€d �Dt
ð4a�2dÞ�ð1�2af Þ�z3þð4a�4d�afþ2af�1Þ�z2þð2d�2af Þ�zþ18z3 �D€d �Dt2
ð1�2af Þ�zþ12z �Dp
8>>>>>><>>>>>>:
9>>>>>>=>>>>>>;ð17Þ
In addition, based on Eqs. (14) and (16), Dd in Eq. (13) can beexpressed by Eq. (18).
Dd ¼ ð4a� 2dÞ � z2 þ ð2d� 1Þ � zþ 14z2 � D€d � Dt2 ð18Þ
3.4. Derivation of the unconditional stability conditions
The expressions for the acceleration, velocity, displacement andpore fluid pressure in the form of Eqs. (17) and (18) can be thensubstituted into the scalar forms of the coupled FE formulation(Eqs. (11) and (13)). This allows the equation of motion and thedynamic consolidation equation to be expressed in terms of onlytwo unknowns (D€d and Dp) as shown in Eqs. (19) and (20).
m � ½4ð1� 2amÞ � z3 þ 4z2� � D€dþ c � Dt � ½2ð2d� 1Þ � ð1� 2af Þ � z3
þ 2ð2d� 2af Þ � z2 þ 2z� � D€dþ k � Dt2 � ½ð4a� 2dÞ � ð1� 2af Þ � z3
þ ð4a� 4d � af þ 2af � 1Þ � z2 þ ð2d� 2af Þ � zþ 1� � D€d
þ l � ½4ð1� 2af Þ � z3 þ 4z2� � Dp ¼ 0 ð19Þ
�u � ð1� af Þ � ½2zþ ð4b� 2Þ � z2� � Dp� 4s � ð1� af Þ � z2 � DpDt
þ lT � Dt � ð1� af Þ � ½ð4a� 2dÞ � z2 þ ð2d� 1Þ � zþ 1� � D€d ¼ 0
ð20Þ

Table 1Unconditional stability conditions of the CH method for the coupled formulation.
Terms in the polynomial F(z) Unconditional stability conditions
For the one-phase formulationa:4m � (1 � 2am) P 0 am 6 0.5b:2c � Dt � (2d � 1) � (1 � 2af) P 0 am 6 af, af 6 0.5c:k � Dt2 � (4a � 2d) � (1 � 2af) P 0 af 6 0.5d:4m P 0e:2c � Dt � (2d � 2af) P 0 am 6 0.5f:k � Dt2 � (4a � 4d � af + 2af � 1) P 0 am 6 af, am + 3af � 2 6 0g:2c � Dt P 0h:k � Dt2 � (2d � 2af) P 0 am 6 0.5i:k � Dt2 P 0
Additional conditions for the two-phase coupled formulationj:4l � (1 � 2af) P 0 af 6 0.5k:4l P 0l:lT � Dt � (4a � 2d) � (1 � af) P 0 af 6 1.0m:lT � Dt � (2d � 1) � (1 � af) P 0 am 6 af, af 6 1.0n:lT � Dt � (1 � af) P 0 af 6 1.0o:u � (4b � 2) � (1 � af) P 0 b P 0.5, af 6 1.0p:4s/Dt � (1 � af) P 0 af 6 1.0q:2u � (1 � af) P 0 af 6 1.0
Overallam 6 af 6 0.5 and b P 0.5
86 B. Han et al. / Computers and Geotechnics 64 (2015) 83–95
In order to separate the main unknowns D€d and Dp, another form ofEqs. (19) and (20) is obtained after algebraic rearrangement,expressed in Eqs. (21) and (22).
½4m � ð1�2amÞþ2c �Dt � ð2d�1Þ � ð1�2af Þþk �Dt2 � ð4a�2dÞ � ð1�2af Þ� �z3
þ½4mþ2c �Dt � ð2d�2af Þþk �Dt2 � ð4a�4d �af þ2af �1Þ� �z2
þ½2c �Dtþk �Dt2 � ð2d�2af Þ� � zþk �Dt2
8>>><>>>:
9>>>=>>>;
D€d
þ 4l � ð1�2af Þ �z3
þð4lÞ � z2
( )Dp¼ 0 ð21Þ
lT � Dt � ð4a� 2dÞ � ð1� af Þ � z2
þlT � Dt � ð2d� 1Þ � ð1� af Þ � zþlT � Dt � ð1� af Þ
8>><>>:
9>>=>>;D€d
�u � ð4b� 2Þ � ð1� af Þ þ 4 s
Dt � ð1� af Þ � z2
þ2u � ð1� af Þ � z
( )Dp ¼ 0 ð22Þ
For convenience A and B are set to represent the multipliers in frontof D€d and Dp respectively in Eq. (21), whereas C and D are used forthe same purpose in Eq. (22). The two equations are then writtenas:
A B
C �D
� �D€d
Dp
( )¼ 0 ð23Þ
For a non-trivial solution, the determinant of the matrix A BC �D
� �must be zero. The determinant of this matrix is a polynomial of z,which leads to the following:
FðzÞ ¼A B
C �D
�������� ¼ A � ð�DÞ � B � C ¼ 0 ð24Þ
where F(z) is the polynomial of z. After substituting the originalforms of A, B, C and D into Eq. (24), F(z) is expressed as the followingequation:
FðzÞ ¼ a0 � z5 þ a1 � z4 þ a2 � z3 þ a3 � z2 þ a4 � z ¼ 0 ð25Þ
where
a0 ¼ ðaþ bþ cÞ � ðoþ pÞ þ l � ja1 ¼ ðaþ bþ cÞ � qþ ðdþ eþ f Þ � ðoþ pÞ þ l � kþm � ja2 ¼ ðdþ eþ f Þ � qþ ðg þ hÞ � ðoþ pÞ þm � kþ n � ja3 ¼ ðg þ hÞ � qþ i � ðoþ pÞ þ n � ka4 ¼ i � q
and a, b, . . . , q are illustrated in Eq. (26).
a b c½4m � ð1�2amÞþ2c �Dt � ð2d�1Þ � ð1�2af Þþk �Dt2 � ð4a�2dÞ � ð1�2af Þ� �z3
d e fþ½4mþ2c �Dt � ð2d�2af Þþk �Dt2 � ð4a�4d �af þ2af �1Þ� �z2
g hþ½2c �Dtþk �Dt2 � ð2d�2af Þ� �z
iþk �Dt2
8>>>>>>>>>>>>><>>>>>>>>>>>>>:
9>>>>>>>>>>>>>=>>>>>>>>>>>>>;
D€d
þ
j4l � ð1�2af Þ �z3
kþð4lÞ �z2
8>>><>>>:
9>>>=>>>;
Dp¼0
llT �Dt � ð4a�2dÞ � ð1�af Þ �z2
mþlT �Dt � ð2d�1Þ � ð1�af Þ �z
nþlT �Dt � ð1�af Þ
8>>>>>>>><>>>>>>>>:
9>>>>>>>>=>>>>>>>>;
D€d�
o pu � ð4b�2Þ � ð1�af Þþ4 s
Dt � ð1�af Þ �z2
qþ2u � ð1�af Þ �z
8>>><>>>:
9>>>=>>>;
Dp¼0
ð26Þ
Based on the Routh–Hurwitz condition for stability, in order for theCH method to be stable, the coefficients in Eq. (25) should firstlyobey the conditions of a0 > 0 and ai P 0 for i > 0. However, basedon the expressions of a0 to a4, the time step Dt is included in theseterms, which means that the derived stability conditions will alsodepend on the time step and therefore the CH method is only con-ditionally stable. Considering that Dt is always greater than zero,the unconditional stability conditions for the CH method can beobtained by setting every single term in a0 to a4, (i.e. a, b, . . . , q)to be equal or larger than zero, which leads to the followingconditions:
a; b; . . . ; q P 0 ð27Þ
Based on Chung and Hulbert [4], the CH method achieves secondorder accuracy and maximum high-frequency dissipation whend = 0.5 � am + af and a = 0.25(1 � am + af)2. These two expressionsfor d and a are employed herein to derive the unconditional stabilityconditions only in terms of am, af and b. Hence, after substitutingthe two expressions, based on Eq. (27), the final unconditionalstability conditions of the CH method for the coupled formulationare summarised in Table 1. The overall unconditional stabilityconditions are expressed by parameters am, af and b, which aream 6 af 6 0.5 and b P 0.5.
However, the second determinant inequality in Eq. (10) is diffi-cult to algebraically evaluate. Following Chan [3], by employinginto Eq. (10) random values for three parameters within their sta-ble ranges to check the stability condition, no violating case hasbeen observed. This procedure empirically ensures the satisfactionof the second determinant inequality in Eq. (10).
The stability conditions derived by employing the Routh–Hur-witz conditions cannot guarantee the L-stability of the CH method.A time integration method is said to be L-stable if it is A-stable andthe numerical solution tends to be zero when the real part of kDtapproaches infinity, where k is the eigenvalue of the amplificationmatrix and Dt is the time step [21]. L-stability is critical for stiffsystems of equations originating from FE discretisation, and itcan help FE analysis to dissipate the high-frequency spuriousvibrations for stiff problems. However, for geotechnical earthquakeengineering problems, soil stiffness is relatively low compared tothe stiffness of structural materials, such as concrete and steel,and therefore the A-stability is reasonably sufficient for thedynamic FE analysis of geotechnical problems.

Fig. 2. FE model for 1-D column analysis subjected to harmonic loading.
Fig. 3. The loading history for 1-D column analysis subjected to harmonic loading.
Table 2Soil properties for 1-D column analysis subjected to harmonic loading.
Parameter Values
Young’s modulus E (kPa) 1.0E+04Density q (g/cm3) 2.0Poisson’s ratio m 0.2Void ratio e 0.538Permeability k (m/s) 1.0E�15Time step Dt (s) 1.0E�03
Table 3Integration parameters for the CH method in the harmonic loading example.
Parameter d a am af q1 b
CH method (CH2) 0.6 0.3025 0.35 0.45 0.818 0.8
B. Han et al. / Computers and Geotechnics 64 (2015) 83–95 87
3.5. Comparison with existing stability investigations
Chung and Hulbert investigated the stability of the CH methodfor the one-phase formulation in 1993, and proposed the stabilityconditions as a function of am and af, as shown in Eq. (28).
am 6 af 6 0:5 ð28Þ
Based on the derived unconditional stability conditions of the CHmethod for the coupled formulation, i.e. am 6 af 6 0.5 and b P 0.5,the former condition is based on the equation of motion and the lat-ter on the dynamic consolidation equation. It is obvious that thestability conditions can reduce to am 6 af 6 0.5 by ignoring thehydraulic coupling, which is identical to the unconditional stabilityconditions of the CH method for the one-phase formulation pro-posed by Chung and Hulbert [4].
The CH method collapses to the Newmark method by applyingam = af = 0. In Table 1, if am = af = 0 is adopted in the relevant termsof the polynomial F(z), the unconditional stability conditions of theNewmark method for the coupled formulation can be obtained,which is 2a P d P 0.5 and b P 0.5. It is worthy to mention thatthe stability of the Newmark method for the coupled formulationwas investigated by Chan [3], and the unconditional stability con-ditions were proposed as Eq. (29).
b2 P b1 P 0:5 and �b1 P 0:5 ð29Þ
where b2 represents 2a, b1 represents d and �b1 is the integrationparameter for the pore fluid pressure in the consolidation equation.According to Chan [3], the variation of pore fluid pressure within atime increment is assumed by �b1, as shown in Eq. (30). It should benoted that the parameter �b1 is similar to the integration parameterb which is adopted in the present study, suggesting that the pro-posed conditions for unconditional stability for the Newmarkmethod are in agreement with the ones given by Chan [3].
pkþ1 ¼ pk þ _pk � Dt þ �b1 � D _p � Dt ð30Þ
Fig. 4. Comparison of the excess pore water pressure time history at point B.
4. Numerical investigation of the stability characteristics of theCH method
In this part of the paper, the analytically derived stability condi-tions of the CH method are firstly validated with dynamic coupledconsolidation FE analyses and then the stability performance of theCH method is examined beyond the limits of the theoretical inves-tigation assuming elasto-plastic soil behaviour. For the validation
part, a one-dimensional (1-D) soil column, assuming linear elasticsoil behaviour and plane-strain conditions, is analysed consideringa range of dynamic loading conditions for various soil permeabilityvalues. The numerical results are firstly compared with previouslypublished numerical investigations to further verify the implemen-tation of the CH method for dynamic coupled consolidation analy-sis. It should be noted that zero material damping is employed forall the linear elastic numerical simulations for consistency with theassumptions of the theoretical stability analysis. The last numericalexercise involves plane-strain analyses of a foundation subjected

(a): β=0.800
(b): β=0.497
(c): β=0.493
Fig. 5. Displacement (point A) and excess pore water pressure (point B) time histories for various b values, predicted with the CH2 parameters for high permeability of the soilcolumn.
88 B. Han et al. / Computers and Geotechnics 64 (2015) 83–95
to dynamic surface loading, assuming elasto-plastic soil behaviourprescribed with a bounding surface plasticity constitutive model.
4.1. 1-D column subjected to harmonic loading
The first example concerns a soil column subjected to harmonicloading. The FE mesh (consisting of 80 8-noded quadrilateral iso-parametric elements) and the boundary conditions are shown inFig. 2. For the hydraulic boundary conditions, pore water pressureis prescribed as zero at the top of the mesh and is not allowed tochange throughout the analysis (i.e. Dp = 0). The remaining bound-aries are considered to be impermeable (i.e. no flow across the
boundaries). Hydrostatic pore water pressure and static self-weight are prescribed as the initial stresses for the numerical anal-yses. Furthermore, a uniformly distributed sinusoidal load isapplied on the top boundary of the model, which is described byEq. (31) and is illustrated in Fig. 3. The soil properties of the modelare listed in Table 2. In all the presented examples, the values ofthe time integration parameters for the CH method are obtainedby complying with the previously discussed conditions for uncon-ditional stability, second order accuracy and optimum high-fre-quency dissipation with minimum low frequency impact. In thisexample, the adopted parameters of the CH method, shown inTable 3, correspond to a spectral radius at the high frequency limit

Fig. 6. The loading history for 1-D column analysis subjected to impulse loading.
Table 4Soil properties for 1-D column analysis subjected to impulse loading.
Parameter Value
Young’s modulus E (kPa) 1.0E+06Density q (g/cm3) 2.0Poisson’s ratio m 0.2Void ratio e 0.538Permeability k (m/s) 1.0E�02Time step Dt (s) 1.0E�01
Fig. 7. Spectral radii for the CH3, CH2, CH1, NMK2 and NMK1 method (after Kontoe[8]).
B. Han et al. / Computers and Geotechnics 64 (2015) 83–95 89
of q1 = 0.818. It should be noted that the spectral radius is a mea-sure of numerical damping; q = 1.0 corresponds to zero numericaldamping and descending values below that limit indicate anincreasing presence of numerical damping. This set of parametersis denoted as CH2 in order to distinguish it from the sets of param-eters which are adopted in the subsequent examples. It should benoted that a value of b = 0.8 is initially adopted as an example forthe unconditionally stable range for this parameter.
q ¼t=0:02 0 6 t 6 0:02 s1þ 0:25 � sin½20p � ðt � 0:02Þ� t > 0:02 s
ð31Þ
The numerical predictions of this study are first compared withthe results presented by Li et al. [12], where a similar FE analysiswas conducted and an ‘‘iterative stabilized fractional step’’ timeintegration algorithm was used. It should be noted that an imper-meable soil column was simulated by Li et al. [12]. However, in thepresent study, a very low permeability value (1.0E�15 m/s) isadopted to represent an impermeable material, utilising the two-phase coupled formulation. Fig. 4 shows the comparison of thecompressive excess pore water pressure time history at the pointB, which shows good agreement between the numerical predictionand Li et al. [12]. Although not shown here for brevity and clarity ofthe graphs, the same response is obtained for all b values between0.5 and 1.0 inclusive.
Further analyses are then performed in which b is reduced below0.5 in order to check numerically the stability limit for the CHmethod. The results show the same stable excess pore water
Table 5Parameters for the CH and Newmark method.
Time integration method Integration scheme d
CH method CH2 0.6CH method CH1 0.5Newmark method NMK2 0.6Newmark method NMK1 0.5CH method CH3 0.9286
pressure response as shown in Fig. 4, even for b values as low as0.2. This is attributed to the employed extremely low permeabilityfor the soil column. In particular, the multiplier in front of b in thedynamic coupled formulation of Eq. (22) is u, which is the scalarform of the matrix [U]. For the analysis with low permeability, [U]is close to zero, and therefore the effect of b on the stability isinsignificant.
However, the effect of the parameter b on the stability of theanalysis becomes more significant when higher soil permeabilityis employed. In the following analysis, a higher permeability value(k = 1.0E�2 m/s) is adopted for the soil column, where b is againgradually reduced to reach numerically the stability limit. The FEresults by using the CH method in terms of displacement (at pointA) and excess pore water pressure (at point B) time histories areshown in Fig. 5. Clearly, when b = 0.8 (Fig. 5(a)), both the displace-ment and pore water pressure responses are stable and the sameresults are obtained for values of 0.5 6 b 6 1.0. When, however, bis reduced to a slightly smaller value of 0.497, an instability inthe pore water pressure response is observed immediately. Never-theless, the evolution of displacement with time remains stable(Fig. 5(b)). Furthermore, when b is reduced further to 0.493, theinstability in terms of excess pore water pressure aggravates, whilethe displacement response also starts to be unstable (Fig. 5(c)).Consequently, this example confirms that, to ensure stability ofthe numerical solution when using the CH method, b should beequal or larger than 0.5, which is in agreement with the proposedtheoretical condition for unconditional stability. Furthermore, thepore water pressure response seems to be slightly more sensitiveto the b value than the displacement response.
4.2. 1-D column subjected to impulse loading
The main advantage of the CH method is that the numericaldamping is controllable by the user allowing the dissipation ofspurious high-frequency noise without affecting low-frequency
a am af b
0.3025 0.35 0.45 0.80.25 0.5 0.5 0.80.3025 0.80.25 0.80.5102 �0.1429 0.2857 0.8

Fig. 8. Comparison of acceleration time histories (at point A) by using five time integration methods.
Fig. 9. Comparison of displacement time histories (at point A) by using five time integration methods.
90 B. Han et al. / Computers and Geotechnics 64 (2015) 83–95
response. For the one-phase formulation, this feature of the CHmethod has been thoroughly investigated in Kontoe [8] and Kontoeet al. [10]. However, for the two-phase coupled formulation, thenumerical damping does not only affect the displacementresponse, but also the predicted pore water pressure. Therefore,in order to explore the effects of numerical damping on the pre-dicted response, FE analyses of a soil column subjected to impulseloading are carried out herein. The FE mesh and the boundary con-ditions are the same as the model used in the previous section,shown in Fig. 2. Furthermore, the loading applied on the topboundary of the soil column is illustrated in Fig. 6 and the soilproperties are shown in Table 4.
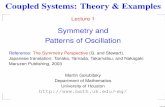
Two time integration methods are used in the analyses, the CHand the Newmark methods, adopting in total 5 sets of parameters,which are shown in Table 5. The spectral radius (q) variationsagainst D t/T for the five sets of parameters are shown in Fig. 7,where q = 1 corresponds to zero numerical damping and q = 0 cor-responds to the maximum attained numerical damping. Further-more, T is the natural period of an undamped single degree-of-freedom (SDOF) system and Dt is the time step. For the examinedsoil column this corresponds to an equivalent SDOF Dt/T of 1.8.Therefore, based on Fig. 7, it can be seen that, when Dt/T is equalto 1.8, the order of the numerical damping obtained by the fiveintegration methods is CH3 > NMK2 > CH2 > CH1 = NMK1.

Fig. 10. Comparison of excess pore pressure time histories (at point B) by using five time integration methods.
Fig. 11. FE model for the elasto-plastic foundation analysis.
Fig. 12. The loading history for the elasto-plastic foundation analysis.
Table 6Soil properties for the elasto-plastic foundation analysis.
Parameter Soil properties
Shear modulus E (kPa) 164.0Density q (g/cm3) 2.0Poisson’s ratio m 0.20Void ratio e 0.724Permeability k (m/s) 1.0E�02Time step Dt (s) 1.0E�03
B. Han et al. / Computers and Geotechnics 64 (2015) 83–95 91
The acceleration and displacement time histories at monitoringpoint A and the excess pore water pressure time history at moni-toring point B are computed with the five time integration meth-ods. To investigate the impact of numerical damping on thepredicted response, the analysis results using the five methodsare compared in Figs. 8–10, in terms of acceleration, displacementand excess pore water pressure time histories respectively, in bothoriginal and zoom-in scales. From the three figures, it can be seenthat the predicted oscillations in different responses by the fivemethods vary significantly. In particular, based on the comparisonof acceleration time histories, undamped oscillations are observedfor the dynamic responses predicted by CH1 and NMK1 methods,while for those analyses involving numerical damping (CH2,NMK2 and CH3), oscillations are more significantly damped as lar-ger numerical damping is employed. Furthermore, for the displace-ment and pore water pressure response, it can be seen that with alarger numerical damping, the oscillation magnitude reduces moredramatically, approaching faster the steady state. However, formore general recommendations for the selection of numericaldamping, a wider study is necessary on a range of real engineeringproblems.
4.3. Elasto-plastic foundation subjected to step loading
In order to explore the stability performance of the CH methodbeyond the assumptions of the theoretical investigation, a stripfooting resting on the ground surface is analysed, assuming

(a): β=0.800
(b): β=0.496
(c): β=0.493
Fig. 13. Displacement (at point C) and excess pore water pressure (at point D) time histories of various b values by using CH2 method.
92 B. Han et al. / Computers and Geotechnics 64 (2015) 83–95
elasto-plastic soil constitutive behaviour. The FE mesh and bound-ary conditions of the problem are shown in Fig. 11, where only ahalf of the model is discretised because of the symmetry, and100 8-noded quadrilateral isoparametric elements are generated.For the displacement boundary conditions, both horizontal andvertical displacements are restricted at the bottom boundary andonly horizontal displacements are restricted at the lateral bound-aries. It should be noted that advanced absorbing boundary condi-tions could be used to avoid the reflection of waves for thedynamic analysis. However, since the purpose of this analysis isto investigate the stability conditions for the CH method, only ele-mentary boundary conditions are utilised. Furthermore, for the
hydraulic boundary conditions, the pore water pressure is pre-scribed as zero at the ground surface (outside the footing) and isnot allowed to change. The remaining boundaries are consideredas impermeable. Hydrostatic pore water pressure and static self-weight are prescribed as the initial stresses for the numerical anal-yses. Finally, a uniformly distributed load is applied on the topboundary, as illustrated in Fig. 12 and the time integration param-eters listed in Table 3 are employed, varying parametrically thevalue of b.
A variant of the bounding surface plasticity model of Papadimi-triou and Bouckovalas [15,19,20], is utilised for this foundationanalysis, which is capable of simulating elasto-plastic cyclic

(a): β=0.800
(b): β=0.496
(c): β=0.493
Fig. 14. Displacement and excess pore water pressure contours at t = 1.0 s of various b values by using CH2 method (displacement: m and excess pore water pressure: kPa).
B. Han et al. / Computers and Geotechnics 64 (2015) 83–95 93

94 B. Han et al. / Computers and Geotechnics 64 (2015) 83–95
behaviour of granular materials subjected to dynamic loading. Forthis constitutive model, a kinematic yield surface, boundingsurface, dilatancy surface and critical state surface are utilised tosimulate the plastic deformation, hardening and softening behav-iour and failure criterion. 29 model parameters are required todescribe the soil behaviour and various surfaces for this model. Itis pointed out that the objective of the current paper is not the pre-sentation and detailed calibration of this model, but the investiga-tion of performance of the CH algorithm in more realistic soilcondition. Therefore, fully calibrated model parameters for denseNevada sand are taken from Taborda [19] and Taborda et al. [20]and applied in the analysis of this footing. Only the basic soil prop-erties are given in Table 6 for brevity and the reader is directed toTaborda et al. [20] for detailed description of model parametersand their calibration.
The stability condition of the CH method is investigated for theelasto-plastic foundation by gradually reducing b values in orderto reach numerically the stability limit for the coupled analysis.The displacement (at point C) and excess pore water pressure (atpoint D) time histories are presented in Fig. 13. When b = 0.5–1.0,both displacement and pore water pressure responses are stable,as shown in Fig. 13(a) of taking b;= 0.8 for example. However, basedon Fig. 13(b), when b is gradually reduced to 0.496, the pore waterpressure response starts to be unstable immediately. It should benoted that the displacement response is observed to be stable, butits magnitude at the end of analysis is slightly greater than that withb = 0.8. This indicates that the numerical error has been slightlyamplified through the FE analysis although no obvious unstable dis-placement response is observed. Lastly, when b is reduced further to0.493, the instability of excess pore water pressure deteriorates,which triggers the instability of displacement response (Fig. 13(c)).
Furthermore, the contours of displacements and excess porewater pressures at the end of the analyses (at t = 1.0 s) are pre-sented in Fig. 14. It should be noted that for each analysis the con-tours show a range of displacement and excess pore water pressurebetween the maximum and the minimum respective values in themesh. Firstly, when b;= 0.8, stable displacement and pore pressureresponses are observed in the contours (Fig. 14(a)). The excess porewater pressure is negligible at this stage. Secondly, when b isreduced to 0.496, the excess pore water pressure starts to be unsta-ble from the bottom of the numerical model, creating unusual con-tour patterns (Fig. 14(b)). Slightly larger displacement response isobserved compared with the response with b = 0.8 (Fig. 14(a)),due to the amplified numerical error, which however has notresulted in obvious numerical instability for displacementresponse as explained above for Fig. 13(b). Thirdly, when b isreduced further to 0.493, the instability of excess pore water pres-sure aggravates, which triggers the instability of displacementresponse (Fig. 13(c)). Furthermore, both in terms of displacementand pore water pressure, the response at the bottom of the numer-ical model is more unstable than the response at the top.
Consequently, based on the results shown for the elasto-plasticfoundation analysis, in order to obtain stable dynamic results withthe CH method, b should be equal or larger than 0.5. Therefore,good agreement is observed between FE analysis results and thetheoretical stability condition. Furthermore, despite that the theo-retical stability condition for the CH method is only derived for thelinear elastic behaviour, the examined case indicates that it couldalso be relevant for nonlinear elasto-plastic problems.
5. Conclusions
The stability of the CH method for a fully coupled dynamic con-solidation formulation is analytically investigated for the first timeand conditions for unconditional stability are derived. It is shown
that the proposed stability conditions can simplify to the stabilityconditions of the CH method for the one-phase formulation (i.e.without hydraulic coupling). Furthermore, by degrading the CHmethod to the Newmark method, the stability conditions are inagreement with the ones proposed in previous stability investiga-tions for the Newmark method for coupled formulation. Since theCH method is a generalisation of the Newmark, HHT and WBZ meth-ods, the principle advantage of the proposed stability conditions isthat they are relevant for most of the commonly used time integra-tion methods under the two-phase coupled formulation.
The analytically derived stability conditions are explored withFE analyses considering a range of loading conditions, modelgeometries and constitutive models. Firstly, analyses consideringa 1D linear elastic soil column subjected to a harmonic load arecarried out, showing a good agreement between the theoreticallyderived stability condition and the back-calculated one with theaid of numerical analysis. This set of analyses also showed thatthe stability of the solution depends on the adopted soil permeabil-ity value, with the instability been more pronounced in the high-permeability soil column.
The next set of analyses considered the impact of numericaldamping on the predicted response of a soil column subjected toimpulse loading. The parametric variation of numerical dampingshowed that the predicted response is significantly affected interms of acceleration, displacement and pore water pressure. Inparticular, oscillations are more significantly damped as largernumerical damping is employed but without affecting theresponse finally approaching the same steady state.
Finally, the stability characteristics of the CH method are inves-tigated more stringently with an elasto-plastic analysis of a foun-dation subjected to dynamic loading. The investigated stabilityconditions with this set of analyses is also in agreement with thetheoretical stability conditions, indicating that the proposed stabil-ity conditions may be also applicable to more realistic nonlinearproblems.
Appendix A
½M� ¼XN
i¼1
ZVol½N�Tq½N�dVol
� �
½C� ¼XN
i¼1
ZVol½N�T c½N�dVol
� �
½K� ¼XN
i¼1
ZVol½B�T ½D�½B�dVol
� �
½L� ¼XN
i¼1
ZVolfmg½B�T ½Np�dVol
� �
fmgT ¼ 1 1 1 0 0 0f g
½U� ¼XN
i¼1
ZVol
1cf½E�T ½k�½E�dVol
!
½G� ¼XN
i¼1
ZVol
1g½N�T ½k�½E�dVol
� �
½S� ¼XN
i¼1
ZVol
nKf½Np�T ½Np�dVol
� �

B. Han et al. / Computers and Geotechnics 64 (2015) 83–95 95
½n� ¼XN
i¼1
ZVol½E�T ½k�fiGgdVol
� �
½E� ¼ @Np
@x@Np
@y@Np
@z
h iT
DR ¼ ð1� af ÞfDRg þ ð1� amÞ½M�1
aDt_dtk
n oþ 1
2a€dtk
n o� �
þ ð1� af Þ½C�da
_dtk
n o� 1� d
2a
� �Dt €dtk
n o� �þ fDRgtk
DF ¼ ð1� af ÞDt �½n� � fQg þ ½U�fptkg � ½G� €dtk
n o� �þ ð1� amÞbDt½G� 1
aDt_dtk
n oþ 1
2a€dtk
n o� �þ fDFgtk
where [N] is the shape function matrix, [B] is the matrix of deriva-tives of the shape function, [D] is the constitutive relation matrix,[NP] is the shape function matrix for the pore fluid, q and c arethe material density and damping ratio of the material, [k] is thepermeability matrix, n and Kf are the porosity of the soil and thebulk modulus of the pore fluid, fiGg ¼ iGx iGy iGz
�T is the unitvector parallel, but in the opposite direction, to the gravity, cf isthe bulk unit weight for the pore fluid, Q is any sink or/and sources,and fDRgtk
and fDFgtkare the out-of-balance force at the previous
time increment, which ideally should be zero.
References
[1] Bathe KJ. Finite element procedures in engineering analysis. NewJersey: Prentice Hall; 1996.
[2] Booker JR, Small JC. An investigation of the stability of numerical solutions ofBiot’s equations of consolidation. Int J Solids Struct 1975;11:907–17.
[3] Chan AHC. A unified finite element solution to static and dynamic problems ofgeomechanics, Ph.D. thesis. Swansea University; 1988.
[4] Chung J, Hulbert GM. A time integration algorithm for structural dynamicswith improved numerical dissipation: the generalized-a method. J Appl Mech1993;60(2):371–5.
[5] Hilber HM, Hughes TJR. Collocation, dissipation and overshoot for timeintegration schemes in structural dynamics. Earthq Eng Struct Dynam1978;6(1):99–117.
[6] Hilber HM, Hughes TJR, Taylor RL. Improved numerical dissipation for timeintegration algorithms in structural dynamics. Earthq Eng Struct Dynam1977;5(3):283–92.
[7] Hurwitz A. Uber die Bedingungen, unter welchen eine Gleichung nurWurzeln mit negativen reellen Teilen bestzt. Math Annal 1895;46:273–84.
[8] Kontoe S. Development of time integration schemes and advanced boundaryconditions for dynamic geotechnical analysis, Ph.D. thesis. Imperial CollegeLondon; 2006.
[9] Kontoe S, Zdravkovic L, Menkiti CO, Potts DM. Seismic response andinteraction of complex soil retaining systems. Comp Geotech 2012;39:17–26.
[10] Kontoe S, Zdravkovic L, Potts DM. An assessment of time integrationschemes for dynamic geotechnical problems. Comp Geotech 2008;35(2):253–64.
[11] Kontoe S, Zdravkovic L, Potts DM. The generalized a-algorithm for dynamiccoupled consolidation problems in geotechnical engineering. In: 12thInternational conference of international association for computer methodsand advances in geomechanics (IACMAG); 2008. p. 1449–558.
[12] Li X, Han X, Pastor M. An iterative stabilized fractional step algorithm for finiteelement analysis in saturated soil dynamics. Comp Meth Appl Mech Eng2003;192(35–36):3845–59.
[13] Nazem M, Carter JP, Airey DW. Arbitrary Lagrangian–Eulerian method fordynamic analysis of geotechnical problems. Comp Geotech 2009;36(4):549–57.
[14] Newmark NM. A method of computation for structural dynamics. J Eng Mech,ASCE 1959;85:67–94.
[15] Papadimitriou AG, Bouckovalas GD. Plasticity model for sand under small andlarge cyclic strains: a multiaxial formulation. Soil Dynam Earthq Eng2002;22(3):191–204.
[16] Potts DM, Zdravkovic L. Finite element analysis in geotechnical engineering:theory. London: Thomas Telford; 1999.
[17] Routh EJ. A treatise on the stability of a given state of motion. London:Macmillan; 1877.
[18] Sabetamal H, Nazem M, Carter JP, Sloan SW. Large deformation dynamicanalysis of saturated porous media with applications to penetration problems.Comp Geotech 2014;55:117–31.
[19] Taborda DMG. Development of constitutive models for application in soildynamics, Ph.D. thesis. Imperial College London; 2011.
[20] Taborda DMG, Zdravkovic L, Kontoe S, Potts DM. Computational study on themodification of a bounding surface plasticity model for sands. Comp Geotech2014;59:145–60.
[21] Wood WL. Practical time-stepping schemes. Oxford: Clarendon Press; 1990.[22] Wood WL, Bossak M, Zienkiewicz OC. An alpha modification of Newmark’s
method. Int J Numer Meth Eng 1981;15(10):1562–6.