Stability Analysis of Self Balancing System with Elastic · PDF filemethod of balancing of a...
5
Φ X Y Y z Z y Y x C O ω θ θ Φ ω The 14th IFToMM World Congress, Taipei, Taiwan, October 25-30, 2015 DOI Number: 10.6567/IFToMM.14TH.WC.OS14.008 Stability Analysis of Self-Balancing System with Elastic Shaft Tadeusz Majewski Department of Industrial&Mechanical Engineering, Universidad de las Americas-Puebla, Puebla 72810, Mexico e-mail: [email protected] Dariusz Szwedowicz Centro Nacional de Investigacion y Desarrollo Tecnologico, Cuernavaca, Morelos, Mexico e-mail: [email protected] Abstract: This paper presents a method of balancing of a disk on an elastic shaft. Free balls or rollers are used as compensating elements for the disk´s unbalance. It is a self-balancing system. With vibration of the disk, the balls change their positions with respect to the disk which leads to a change in the system unbalance. For some ranges of the disk speed, the balls are able to compensate for unbalance. The vibratory forces which are responsible for such behavior of the balls are defined. The paper presents the way the vibratory forces depend on the system parameters. Detailed analysis was done for the stability of the free elements and it was shown when the balls can compensate for the disk unbalance and eliminate the disk´s vibrations. Keywords: Balancing, Vibrations, Stability 1 Introduction The unbalance of the rotors is the most frequent source of vibrations. Especially at a high speed of the rotor, the dynamic forces and amplitude of vibrations can be large. Many papers were published where this problem is discussed [1] . The method of self-balancing of the rotors has been known for some years [2-9] . In this method free elements such as balls, rollers or sometime fluid are located inside the rotor or in a special container fixed to the rotor and they rotate together. The problem of the rotors balancing with free elements is more complex than the classical dynamic model of the rotor because of the behavior of the rotors influence on the behavior of the free elements and vice versa. The free elements are no always able to compensate for the unbalance, sometime they increase the system unbalance. One of the more interesting applications of this method is for hand-held equipment with rotating elements, e.g for hand grinds or even optic discs [10, 11] . It can be a unique method for balancing a machine with variable unbalance, e. g. washing machines where the unbalance from laundering may be very large and different for each running or for centrifuges. The author of this paper also studied the problem of self-balancing and published some papers [12, 13] . 2 Description of the system The balancing system (Fig 1) consists of disk 1, drums 2 and 6, free balls 3 and 4, the elastic shaft 5 and its bearings 1 and 8 at the ends of the shaft. Sometimes the balls cannot be placed on the same plane where there is unbalance and in our model they are at a distance l2, l3. In each drum there can be N≥2 balls with the same mass m and they change their position around the circle at the radius R. The position of the disk on the shaft is defined by l1+l2 and it is between 0.3l and 0.7l. Figure 1 Scheme of the system Figure 2 The angular coordinates of the disk 1 2 6 3 4 5 l1 l2 l3 l4 e C Z X Y 1 2 3 4 5 6 7 8 θ Φ ω O C O ωt αi Y X x y
Transcript of Stability Analysis of Self Balancing System with Elastic · PDF filemethod of balancing of a...

Φ
X
Y
Y
z
Z
y
Y
x
C
O
ω
θ
θ
Φ
ω
The 14th IFToMM World Congress, Taipei, Taiwan, October 25-30, 2015 DOI Number: 10.6567/IFToMM.14TH.WC.OS14.008
Stability Analysis of Self-Balancing System with Elastic Shaft
Tadeusz Majewski
Department of Industrial&Mechanical Engineering, Universidad de las Americas-Puebla, Puebla 72810, Mexico
e-mail: [email protected]
Dariusz Szwedowicz
Centro Nacional de Investigacion y Desarrollo Tecnologico, Cuernavaca, Morelos, Mexico
e-mail: [email protected]
Abstract: This paper presents a method of balancing of a disk on
an elastic shaft. Free balls or rollers are used as compensating
elements for the disk´s unbalance. It is a self-balancing system.
With vibration of the disk, the balls change their positions with
respect to the disk which leads to a change in the system
unbalance. For some ranges of the disk speed, the balls are able to
compensate for unbalance. The vibratory forces which are
responsible for such behavior of the balls are defined. The paper
presents the way the vibratory forces depend on the system
parameters. Detailed analysis was done for the stability of the free
elements and it was shown when the balls can compensate for the
disk unbalance and eliminate the disk´s vibrations.
Keywords: Balancing, Vibrations, Stability
1 Introduction
The unbalance of the rotors is the most frequent source of
vibrations. Especially at a high speed of the rotor, the
dynamic forces and amplitude of vibrations can be large.
Many papers were published where this problem is
discussed [1].
The method of self-balancing of the rotors has been
known for some years [2-9]. In this method free elements
such as balls, rollers or sometime fluid are located inside
the rotor or in a special container fixed to the rotor and they
rotate together.
The problem of the rotors balancing with free elements is
more complex than the classical dynamic model of the
rotor because of the behavior of the rotors influence on the
behavior of the free elements and vice versa.
The free elements are no always able to compensate for the
unbalance, sometime they increase the system unbalance.
One of the more interesting applications of this method is
for hand-held equipment with rotating elements, e.g for
hand grinds or even optic discs [10, 11]. It can be a unique
method for balancing a machine with variable unbalance,
e. g. washing machines where the unbalance from
laundering may be very large and different for each
running or for centrifuges.
The author of this paper also studied the problem of
self-balancing and published some papers[12, 13].
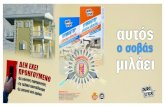
2 Description of the system
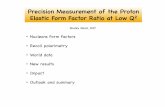
The balancing system (Fig 1) consists of disk 1, drums 2
and 6, free balls 3 and 4, the elastic shaft 5 and its bearings
1 and 8 at the ends of the shaft. Sometimes the balls cannot
be placed on the same plane where there is unbalance and
in our model they are at a distance l2, l3. In each drum there
can be N≥2 balls with the same mass m and they change
their position around the circle at the radius R. The position
of the disk on the shaft is defined by l1+l2 and it is between
0.3l and 0.7l.
Figure 1 Scheme of the system
Figure 2 The angular coordinates of the disk
1 2 6
3 4
5
l1 l2 l3 l4
e C Z
X
Y
1 2 3 4 5 6 7 8
θ
Φ
ω
O
C
O
ωt
αi
Y
X x
y

Figure 3 Position of the ball inside the drum
3 Mathematical model of self-balancing
During rotation the position of the disk is defined by the
coordinates
Tyxo ],,,,[ 4444 q . (1)
The balls in the drum are at some distance from the disk
and the deformation of the shaft is different that the disk.
The displacement of the shaft in the planes 2-3 and 6-7
depends on the displacement of the disk and the distance
from the disk l2 or l3. This relation can be written as
N
iixQxdxcxxbx
1114114112 , (2)
N
jjyQydycyyby
1214214216 . (3)
The coefficients b11x, …, d21y depend on the length of each
segment of the shaft l1, l2, l3, l3.
The equations governing the behavior of the disk are as
follows
i j
jo QkQkQqKqccqM iogo 21)( (4)
The coefficient of the disk inertia, its damping and
gyroscopic are M, co, cg and the stiffness of the shaft is Ko.
Qo, Qi, Qj present the excitation from the rotor unbalance,
the balls in the left and right drums. The balls are located at
some distance from the disk and their influence on the disk
behavior is presented by the coefficient k1, k2.
The mass moment of the system inertia around the x axis
22211
211
22 )(sin NmcNmctMeII yyxdx . (5)
where Ixd is the mass moment of inertia of the disk.
The gyroscopic moment Mg around the axis x is
))(sin( 22211
211
22 NmcNmctMeJ
JM
yyzd
zgx
(6)
Some of the excitations from Eq. (4) have a form
tMeoxQ cos2 , (7)
)cos()( 2iiix tmRQ , (8)
22 )sin()( ltmRQ iii . (9)
The mass of the balls is very small and Eq. (4) may be
taken in a simpler form.
The resultant stiffness Ko of the shaft at the position of the
disk depends on the stiffness K(s) of all segments of the
shaft (s=1,2,3,4). The stiffness of one segment is a function
of its length. The coefficients K(s) are established from the
relations given for the bending of the shaft and they are
function of their length.
The relative motion of the balls with respect to the
reference frame which rotates with the disk is described by
the following equations
iicRityitxi /)]cos(2)sin(2[ , (10)
jjcRjtyjtxj /)]cos(6)sin(6[ . (11)
The behavior of the balls depends on the accelerations of
the shaft in the planes of the drum so the relations (2,3)
have to be used.
The balls change their position slowly with respect to the
disk and their excitations on the disk Qi, Qj can be taken as
harmonic.
4 Simulation of the behavior of the system
Some of the system parameters taken for the simulation
are: M=25 kg, Me=0÷0.05 kgm, EI=1650 Nm2 (stiffness of
the shaft), l=1.5 m, m=0.15 kg, and R=0.15 m.
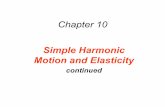
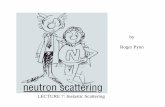
The behavior of the system during self-balancing is
presented in Fig 4 - 5. By changing the position of the disk
on the shaft, the natural frequencies also change. The
vibrations of the drums with the balls depend on the disk´s
vibrations and the distance of the drum from the disk (Eqs.
2,3). It was observed that the method is effective only for a
rotor´s speed higher than the natural frequencies of the
disk. The diagrams in Fig 4 present the situation when the
disk is in the middle of the shaft, the balls are at a small
distance of 5 mm from the disk and its speed is ω=100
rad/s. The vibrations of the disk vanish, the final unbalance
of the system goes to zero when the balls go to their final
positions (Fig 5e).
0 50 100 150 200 250 300-10
0
10
Time
x,
y [
mm
]
Linear vibrations
0 50 100 150 200 250 300-5
0
5
Time
, [
min
]
Angular vibrations
0 50 100 150 200 250 300-500
0
500
Time
1,
2 [
deg]
Position of the balls
0 50 100 150 200 250 300-400
-200
0
200
Time
1,
2 [
deg]
Position of the balls
0 50 100 150 200 250 300-10
0
10
Time
x2 [
mm
]
Vibration x2
0 50 100 150 200 250 300-10
0
10
Time
x6 [
mm
]
Vibration x6
0 50 100 150 200 250 300-0.1
0
0.1
Time
DM
e [
kgm
]
Final unbalance
0 50 100 150 200 250 300-10
0
10
Time
x,
y [
mm
]
Linear vibrations
0 50 100 150 200 250 300-5
0
5
Time
, [
min
]
Angular vibrations
0 50 100 150 200 250 300-500
0
500
Time
1,
2 [
deg]
Position of the balls
0 50 100 150 200 250 300-400
-200
0
200
Time
1,
2 [
deg]
Position of the balls
0 50 100 150 200 250 300-10
0
10
Time
x2 [
mm
]
Vibration x2
0 50 100 150 200 250 300-10
0
10
Time
x6 [
mm
]
Vibration x6
0 50 100 150 200 250 300-0.1
0
0.1
Time
DM
e [
kgm
]
Final unbalance
0 50 100 150 200 250 300-10
0
10
Time
x,
y [
mm
]
Linear vibrations
0 50 100 150 200 250 300-5
0
5
Time
, [
min
]
Angular vibrations
0 50 100 150 200 250 300-500
0
500
Time
1,
2 [
deg]
Position of the balls
0 50 100 150 200 250 300-400
-200
0
200
Time
1,
2 [
deg]
Position of the balls
0 50 100 150 200 250 300-10
0
10
Time
x2 [
mm
]
Vibration x2
0 50 100 150 200 250 300-10
0
10
Time
x6 [
mm
]
Vibration x6
0 50 100 150 200 250 300-0.1
0
0.1
Time
DM
e [
kgm
]
Final unbalance
a)
b)
c)
d)
f)

Fig 4 Behavior of the system during balancing
a) linear disk vibrations, b) position of the balls in the
left drum, c) angular vibrations of the disk, d)
position of the balls in the right drum, e) final
unbalance DMe
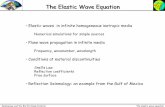
The diagrams in Fig 5 are for the balls at the distance
l2=l3= 250 mm from the disk. The balls go to their final
positions which are different than for l2=l3= 5 mm (Fig
4). The balls do not eliminate the disk unbalance (Fig
5b) and there are the vibrations (Fig 5a). In this case the
balls compensate for only a part of the disk´s unbalance.
0 50 100 150 200 250 300-10
0
10
Time
x,
y [
mm
]
Linear vibrations
0 50 100 150 200 250 300-100
0
100
Time
, [
min
]
Angular vibrations
0 50 100 150 200 250 300-400
-200
0
200
Time
1,
2 [
deg]
Position of the balls
0 50 100 150 200 250 300-400
-200
0
200
Time
1,
2 [
deg]
Position of the balls
0 50 100 150 200 250 300-10
0
10
Time
x2 [
mm
]
Vibration x2
0 50 100 150 200 250 300-5
0
5
Time
x6 [
mm
]Vibration x6
0 50 100 150 200 250 300-0.2
0
0.2
Time
DM
e [
kgm
]
Final unbalance
0 50 100 150 200 250 300-10
0
10
Time
x,
y [
mm
]
Linear vibrations
0 50 100 150 200 250 300-100
0
100
Time
, [
min
]
Angular vibrations
0 50 100 150 200 250 300-400
-200
0
200
Time
1,
2 [
deg]
Position of the balls
0 50 100 150 200 250 300-400
-200
0
200
Time
1,
2 [
deg]
Position of the balls
0 50 100 150 200 250 300-10
0
10
Time
x2 [
mm
]
Vibration x2
0 50 100 150 200 250 300-5
0
5
Time
x6 [
mm
]
Vibration x6
0 50 100 150 200 250 300-0.2
0
0.2
Time
DM
e [
kgm
]
Final unbalance
Fig 5 Behavior of the system during balancing
for l2=l3=250 mm
a) linear disk vibration, b) final unbalance
The diagrams from Fig 4, 5 are for a rotor´s speed higher
than the natural frequencies of the disk.
5 Vibratory forces
The right side of Eqs. (10,11) presents the inertial forces
(N/kg) which force the balls to change their position with
respect to the disk. As the excitations from the disk´s
unbalance and the balls are harmonic, then the vibrations
are also harmonic (1x). From the disk´s unbalance and the
excitation given by the ball ith or jth the vibrations can be
approximated as
tsotcot sincos)( aaoq , (12)
tsitciti sincos)( aaq . (13)
ttt sjcjj sincos)( aaq . (14)
The components aci , asi of the vibrations from ith ball
depend on the position of all balls in the left drum.
The inertial force which acts on the ball ith or jth are as
follows
)]cos(2)sin(2[ ityitxmví
F (15)
)]cos(6)sin(6[ jtyjtxmvjF . (16)
As the vibrations are harmonic then the vibratory forces
can be taken as the average during the period of vibration
T=2π/ω.
dt
T
ityitxT
miF 0
)]cos(2)sin(21
. (17)
Substituting Eqs. (2-3,12-14) into Eq. (17) one obtains the
average vibratory force as a sum of the vibratory forces
from each component of vibrations of the disk and the
forces generated by the balls
QyFQxFiFiFiyFixFiF (18)
Fix, Fiy, FiΦ, Fiθ are the components forces from the
vibrations; x(t), y(t), Φ(t), θ(t), respectively. Each
components of the vibratory force depends on the disk’s
vibration and the position of all balls
r
irl
ilidix FFFF . (19)
The component Fid is the result of disk vibration, the
components of the vibratory force Fil, Fir present the
interaction of the lth ball in the left drum and interaction of
rth ball in the right drum on the ball ith in the left drum.
For example
)]cos()sin([5.0 2lixsllixclil aamRF . (20)
When the vibratory forces are determined then the
positions of equilibrium αif, αjf of all the balls in both
drums are also defined.
0),...,1,,...,1( NrfrfNlflfiFiF (21)
0),...,1,,...,1( NrfrfNlflfjFjF (22)
The balls in their equilibrium positions may compensate
for a part or all of the disk´s unbalance. The Eqs. (21,22)
have some solutions for αif, αjf. Which of them the balls
will occupy and what is the resultant unbalance depend on
their stability in these positions.
6 Stability of the balls
There are some solutions to Eqs. (21, 22) and some of them
can be dynamically stable and others unstable. The
analysis of the stability of the balls should prove that they
are able to compensate or not the disk’s unbalance. As it
was shown earlier the balls may compensate for a part or
all of the unbalance (Fig 4 and 5). Lagrange and Dirichlet’s
theorem allows one to verify if the position of equilibrium
is stable. The system has the minimum potential energy at
these positions if the roots χ of Eq. (23) have negative real
parts [14].
0
3
3
2
3
1
3
...2
2
1
2
...2
1
1
1
FFF
FF
FF
(23)
The derivatives are calculated using Eqs. (18, 19).
a)
b)

r i
ir
l i
il
i
id
i
ix FFFF
(24)
l
ilF
l
ixF
r
irF
r
ixF
(25)
The result of the calculation is shown in Table 1 for
the disk at the middle of the shaft, balancing with one ball
in each drum and different distances of the balls from the
disk. The analysis is done for two speeds of the rotor; 100
rad/s which is higher than the natural frequencies of the
disk and 20 rad/s smaller than the natural frequencies.
When the speed is 100 rad/s and the distance of the balls
from the disk increases then their equilibrium positions
move away from the disk’s unbalance which results in an
increasing final unbalance.
For 20 rad/s the ball’s stable positions are close to the
disk’s unbalance and the balls increase the initial
unbalance of the disk.
ω
[rad/s]
l2=l3
[m]
α11f
[rad]
α21f
[rad]
χ1 χ2
100>
ωo
0.005 2.09 -2.09 -1.80 -0.598
100 0.01 2.09 -2.096 -1.799 -0.598
100 0.1 2.13 -2.14 -1.58 -0.6
100 0.2 2.28 -2.27 -0.92 -0.62
100 0.3 2.66 -2.64 -0.64 -0.046
20<ωo 0.005 -0.184 -0.189 -0.03 -0.01
Table 1 Roots of Eq. (17) for the disk at the position
l1+l2=l/2
The results in Table 2 are for the asymmetrical disk
position on the shaft l1+l2=2l/3.
ω
[rad/s]
l2=l3
[m]
α11f
[rad]
α21f
[rad]
λ1 λ2
100 0.005 4.19 -4.18 -2.02 -0.68
100 0.05 4.23 -4.13 -1.93 -0.66
100 0.1 4.18 -4.1 -1.65 -0.66
100 0.2 3.83 -3.98 -1.02 -0.45
100 0.3 3.17 -3.11 -1.02 -0.019
20< ωo 0.005 -0.44 -0.45 -0.029 -0.009
Table 1. Roots of Eq. (17) for the disk at the position
l1+l2=2l/3
By increasing the distance l2 or l3 (the distance of the balls
from the disk) the equilibrium positions of the balls
become stable but these positions are far from the positions
for which the unbalance would be compensated 100%.
Therefore the resultant unbalance increases as it is
presented in Fig 6 - the efficiency of the system decreases.
Fig 6 Resultant unbalance of the system vs. the distance of
the balls for l1+l2=l/2
Introducing a disturbance of the initial conditions of
the balls in Eqs. (5,10,11) one obtains the variational
equations of the system and they can also be used for
verification of the stability of the balls. The disturbance of
the balls is η11, η12, η21, η22 and their new positions are
α11=α11f+ η11, …, α22=α22f+ η22. (26)
The same for the disk q(t)=qo(t)+ η(t),
where η(t) are the variations of the disk´s position with
respect to its steady-state vibrations qo(t) when the balls
are at the positions α11f, α12f, α21f, α22f.
Fig 7 presents the behavior of the disk and the balls when
the disk is at the middle of the shaft, the balls are very close
to the disk, the speed is 100 rad/s and the displacement of
the balls from their initial position is 0.05 – 0.25 rad.
0 20 40 60 80 100 120 140 160 180 200-1
0
1
Time
1,
2 [
mm
]
Linear vibrations
0 20 40 60 80 100 120 140 160 180 200-0.1
0
0.1
Time
3,
4 [
min
]
Angular vibrations
0 20 40 60 80 100 120 140 160 180 200-10
0
10
20
Time
11,
12 [
deg]
Position of the balls
0 20 40 60 80 100 120 140 160 180 200-10
0
10
20
Time
21,
22 [
deg]
Position of the balls
0 20 40 60 80 100 120 140 160 180 200-1
0
1
Time
x2 [
mm
]
Vibration x2
0 20 40 60 80 100 120 140 160 180 200-1
0
1
Time
x6 [
mm
]Vibration x6
0 20 40 60 80 100 120 140 160 180 2000.148
0.149
0.15
Time
DM
e [
kgm
]
Final unbalance
0 20 40 60 80 100 120 140 160 180 200-1
0
1
Time
1,
2 [
mm
]
Linear vibrations
0 20 40 60 80 100 120 140 160 180 200-0.1
0
0.1
Time
3,
4 [
min
]
Angular vibrations
0 20 40 60 80 100 120 140 160 180 200-10
0
10
20
Time
11,
12 [
deg]
Position of the balls
0 20 40 60 80 100 120 140 160 180 200-10
0
10
20
Time
21,
22 [
deg]
Position of the balls
0 20 40 60 80 100 120 140 160 180 200-1
0
1
Time
x2 [
mm
]
Vibration x2
0 20 40 60 80 100 120 140 160 180 200-1
0
1
Time
x6 [
mm
]
Vibration x6
0 20 40 60 80 100 120 140 160 180 2000.148
0.149
0.15
Time
DM
e [
kgm
]
Final unbalance
Fig 7 Perturbation of the disk and the balls
(ω=100 rad/s, l2=l3= 5 mm, 0.5l)
The behavior of the system for asymmetrical positions of
the disk is presented in Fig 8.
[%]
l2 [m]

0 20 40 60 80 100 120 140 160 180 200-0.2
0
0.2
Time
1,
2 [
mm
]
Linear vibrations
0 20 40 60 80 100 120 140 160 180 200-1
0
1
Time
3,
4 [
min
]
Angular vibrations
0 20 40 60 80 100 120 140 160 180 200-5
0
5
Time
11,
12 [
deg]
Position of the balls
0 20 40 60 80 100 120 140 160 180 200-10
0
10
Time
21,
22 [
deg]
Position of the balls
0 20 40 60 80 100 120 140 160 180 200-0.2
0
0.2
Time
x2 [
mm
]
Vibration x2
0 20 40 60 80 100 120 140 160 180 200-0.2
0
0.2
Time
x6 [
mm
]
Vibration x6
0 20 40 60 80 100 120 140 160 180 2000.1122
0.1123
0.1124
0.1125
Time
DM
e [
kgm
]
Final unbalance
0 20 40 60 80 100 120 140 160 180 200-0.2
0
0.2
Time
1,
2 [
mm
]
Linear vibrations
0 20 40 60 80 100 120 140 160 180 200-1
0
1
Time
3,
4 [
min
]
Angular vibrations
0 20 40 60 80 100 120 140 160 180 200-5
0
5
Time
11,
12 [
deg]
Position of the balls
0 20 40 60 80 100 120 140 160 180 200-10
0
10
Time
21,
22 [
deg]
Position of the balls
0 20 40 60 80 100 120 140 160 180 200-0.2
0
0.2
Time
x2 [
mm
]
Vibration x2
0 20 40 60 80 100 120 140 160 180 200-0.2
0
0.2
Time
x6 [
mm
]
Vibration x6
0 20 40 60 80 100 120 140 160 180 2000.1122
0.1123
0.1124
0.1125
Time
DM
e [
kgm
]
Final unbalance
Fig 8 Perturbation of the disk and the balls
(ω=100 rad/s, l1+l2=2l/3)
The difference of the behavior of the balls in the left and
right drum can be seen. The period of the vibration of the
balls in the right drum is much greater than for the balls in
the left drum. It means that the margin of stability for the
balls in the right drum is smaller than for the balls in the
left drum. The vibrations of the right drum are smaller than
the left drum (l1+l2>l3+l4) so the vibratory forces in the
right drum are smaller and the margin of stability is also
smaller.
7 Conclusions
The paper has proven that the disk’s unbalance can be
completely compensated for if the balls are very close to
the disk. It was shown that with increasing the distance
between the balls and the disk the efficiency of the
balancing decreases. In what way the resultant unbalance
depends on the position of the balls is shown in Fig 6. The
efficiency of the method is smaller for the asymmetrical
position of the disk. The positions of the balls in which
they are able to compensate for a part or all of the disk’s
unbalance are stable for the speeds which are higher than
the disk´s natural frequencies. For low disk speed the balls
increase the unbalance of the system which limits its
application. The results of the paper maybe useful for
engineers who design rotors and want to use this method of
balancing. The vibratory forces are met in many dynamic
systems and they give some interesting phenomena.
Acknowledgements
This research is sponsored by the National Council of
Science and Technology (CONACYT), Mexico. (Grant No.
167877), VIBRATORY MECHANICS AND ITS
APPLICATION.
References 1. Muszynska A., Rotordynamics, CRC Taylor&Francis, 2005
2. Leblanc M., Automatic Balancer for Rotating Bodies. US
Patent 1,159,052, 1915
3. Thearle E. L., Means for dynamically balancing tools. USA
patent No 1,967,163, 1934
4. Thearle E. L., Automatic dynamic balancers. Machine
Design, No.9: 119–124, No.10: 103–106, No. 11: 149–153,
1950
5. Lee J., Van Moorhem W. K., Analytical and experimental
analysis of a self-compensating dynamic balancer in a
rotating mechanism. Transactions of ASME, 118, 468-475,
1996
6. L. Sperling, B. Ryzhik, Ch. Linz, H. Duckstein, Simulation
of two-plane automatic balancing of a rigid rotor.
Mathematics and Computers in Simulation, Vol. 58, Issues
4-6, 351-365, 2002
7. J. Chung, I. Jang, Dynamic response and stability analysis of
an automatic ball balancer for a flexible rotor, Journal of
Sound and Vibration 259 (1), 31–43, 2003
8. Rajalingham C., Bhat R. B., Complete balancing of a disk
mounted on a vertical cantilever shaft using a two ball
automatic balancer, Journal of Sound and Vibration Vol.
290 (1–2), 169–191, 2006
9. L Urbiola-Soto, M Lopez-Parra. Liquid self-balancing
device effects on flexible rotor stability. Shock and
Vibration 20 (1), 109-121, 2013
10. R. Rajalinghman, S. Rakheja. Whirl suppression in
hand-held power tool rotors using guided rolling balancers.
Journal of Sound and Vibration, 217(3) (1998), pp.453-466
11. W. Kim, J.Chung. Performance of automatic ball balancers
on optical disc drives. Journal of Mechanical Engineering
Science, 216, 2002, pp.1071-1080
12. Majewski T. Domagalski R., Meraz M., Automatic
Compensation of Dynamic Forces for the Rigid Rotor,
Journal of Theoretical and Applied Mechanics, Poland, No.
2: 379–403, 2007
13. Majewski T., Position error occurrence in self-balancers
used on rigid Rotors of rotating machinery. Mechanism and
Machine Theory 23 (1): 71 – 78, 1988
14. Blekhman I. I., Synchronization in Science and Technology,
ASME Press Translations, 1988, New York