SRI International, 201 Washington Rd, Princeton, NJ 08543 ... · PDF fileφ′ and...
10
Click here to load reader
Transcript of SRI International, 201 Washington Rd, Princeton, NJ 08543 ... · PDF fileφ′ and...

arX
iv:1
002.
1417
v3 [
phys
ics.
com
p-ph
] 3
Feb
201
1Link http://geographiclib.sf.net/tm.html
E-print arXiv:1002.1417
Transverse Mercator with an accuracy of a few nanometers
Charles F. F. Karney∗
SRI International, 201 Washington Rd, Princeton, NJ 08543-5300
(Dated: February 8, 2010; revised February 3, 2011)
Implementations of two algorithms for the transverse Mercator projection are described; these achieve accuraciesclose to machine precision. One is based on the exact equations of Thompson and Lee and the other uses anextension of Kruger’s series for the mapping to higher order. The exact method provides an accuracy of9 nm
over the entire ellipsoid, while the errors in the series method are less than5 nm within 3900 km of the centralmeridian. In each case, the meridian convergence and scale are also computed with similar accuracy. The speedof the series method is competitive with other less accuratealgorithms and the exact method is about 5 timesslower.
Keywords: geometrical geodesy, map projections, conformal mapping
1. INTRODUCTION
The transverse Mercator or Gauss–Kruger projection is aconformal mapping of the earth ellipsoid where a centralmeridian is mapped into a straight line at constant scale. Be-cause it cannot be expressed in terms of elementary functions,the mapping is usually computed by means of a truncated se-ries (Kruger, 1912; Thomas, 1952). The resulting mappingapproximates the true mapping only within a region centeredon the central meridian.
Transverse Mercator is one of the commonest projectionsused for large-scale maps (it is used for the grid systemsof several countries and is the basis of the universal trans-verse Mercator (UTM) system (Hageret al., 1989, Chap. 2)).For the WGS84 ellipsoid, the variation of the scale is1.25%within 1000 km of the central meridian; it is therefore desir-able to find algorithms for the mapping which are accurateto machine precision over at least this area. In this paper,I describe the implementation of two such algorithms, onebased on the exact equations given by Lee (1976) and theother extending the series given by Kruger (1912) to higherorder. Both implementations compute the forward and re-verse mappings and also return the meridian convergence andscale. These implementations are included in GeographicLib(Karney, 2010).
Scores of other authors have presented methods for comput-ing this mapping over the past century. In particular, Dozier(1980) provided an implementation of Lee’s exact method,and Engsager and Poder (2007) give Kruger’s series to 7th or-der. The distinguishing aspects of this work are the reductionof the overall numerical errors (truncation and round-off)toclose to the precision limit of the computer and the concretebounds I place on these errors.
∗Electronic address: [email protected]
Because floating-point numbers have a finite spacing(Olveret al., 2010,§3.1(i)), the limiting accuracy of any im-plementation is aboutM/2p whereM = 10 000 km is thelength of the quarter meridian of the earth andp is the num-ber of bits in the fraction of the floating-point number system.This gives an error limit of0.5m for p = 24 (single precisionor float),1 nm for p = 53 (double precision or double), and0.5 pm for p = 64 (extended precision or long double). (Here,I use SI prefixes:1 nm = 10−9m, 1 pm = 10−12 m.) Typi-cally p = 24 is too inaccurate to be useful and I don’t considerthis further in this paper. My standard working precision isdouble and the resulting accuracy, if it can be achieved, wouldsatisfy most needs. However, I also use extended precision asone of the tools to verify the accuracy of the double precisionimplementations.
Formulas for mappings can contain expressions which arenumerically ill-conditioned causing precision to be lost.Thisloss of precision is of little consequence if the truncationer-rors are of the same order. However, in attempting to min-imize the numerical errors, I needed an accurate means ofquantifying the truncation and round-off errors. To this end,I constructed a large test set of projected points which werecomputed with an accuracy of 80 decimal digits. This allowedme to eliminate many sources of round-off error. The resultingaccuracies are about 4–8 times the limiting value (equivalentto a loss of only 2–3 bits of precision) and this applies to bothdouble and extended precisions.
In Sect. 2, I review the series method given by Kruger(1912) modifying it to minimize the round-off errors. I turnnext, Sect. 3, to the formulation of the exact transverse Mer-cator projection by Lee (1976) which I use to construct thehigh-precision test set; I also describe its implementation us-ing double precision and I quantify the round-off errors. Iextend Kruger’s series to 8th order (see Sect. 4) and give thetruncation error for the series as a function of truncation leveland distance from the central meridian. Finally, in Sect. 5,Idiscuss some of the properties of the exact mapping far from

2
the central meridian.
2. KRUGER’S SERIES
I summarize here the method developed by Kruger (1912,§§5–8), simplifying it and adapting it for optimal implemen-tation on a computer. The method is also briefly describedby Bugayevskiy and Snyder (1995,§5.1.6). The method en-tails mapping the ellipsoid to the conformal sphere and forthis reason I begin by describing the spherical transverse Mer-cator projection.
Consider a sphere and a point on that sphere of latitudeφ′ and longitude relative to the central meridian ofλ. (I useprimes on variables, e.g.,φ′, where necessary, to distinguishthem from their ellipsoidal counterparts.) The isometric lati-tude is given by
ψ′ = gd−1 φ′, (1)
where
gdx =
∫ x
0
sech t dt = tan−1 sinhx = sin−1 tanhx
is the Gudermannian function given by Olveret al. (2010,§4.23(viii)) (henceforth referred to asDLMF, the Digital Li-brary of Mathematical Functions) and
gd−1 x =
∫ x
0
sec t dt = sinh−1 tanx = tanh−1 sinx
is its inverse. The standard (equatorial) Mercator projectionmaps the sphere onto the plane(λ, ψ′). When working withconformal mappings it is often useful to represent coordinateswith complex numbers where the real part represents the nor-thing and the imaginary part the easting (the phase, or argu-ment, of the complex number gives a bearing measuredclock-wise). In this representation the Mercator projection (a con-formal mapping) is given by
χ = ψ′ + iλ.
Any analytic function ofχ also represents a conformal map-ping (except where its derivative vanishes); its derivative givesthe change in the meridian convergence and scale for the map-ping. In particular (Lee, 1976, Eq. (12.3)),
ζ′ = gdχ = gd(ψ′ + iλ) (2)
gives the transverse Mercator projection of the sphere. Thisis easy to confirm by evaluating the mapping forλ = 0; thisgivesζ′ = φ′, i.e., the central meridian is mapped to a straightline at constant scale (the defining property of the mapping).
I consider now an ellipsoid of revolution with equatorialradiusa, polar semi-axisb, flatteningf = (a − b)/a, eccen-tricity e =
√
f(2− f), and third flatteningn = (a − b)/(a+b) = f/(2−f). For a point with latitudeφ and longitudeλ, the isometric latitude is given by (Lambert, 1772,§117)
ψ = log tan
(
π
4+φ
2
)
− 1
2e log
(
1 + e sinφ
1− e sinφ
)
,
Using the identitiesDLMF, Eqs. (4.23.42) and (4.37.24), thisrelation may also be written as
ψ = gd−1 φ− e tanh−1(e sinφ). (3)
As in the case of the sphere,χ = ψ+ iλ defines the Mercatorprojection. Equating the isometric latitude for the spherewiththat for the ellipsoid,ψ′ = ψ, defines a relation
φ′ = gd(
gd−1 φ− e tanh−1(e sinφ))
, (4)
which maps a point on the ellipsoid with latitudeφ confor-mally to a point on the sphere with latitudeφ′. In this con-text, φ′ is called the “conformal latitude” and the sphere isreferred to as the “conformal sphere.” The transformation toζ′, Eq. (2), whereψ is given by Eq. (3), defines a confor-mal mapping of the ellipsoid to a plane in which the centralmeridian is mapped to a straight line with a scale which isnearly constant (the variation isO(f)). I call this the “spher-ical transverse Mercator projection” as it is the simplest gen-eralization of the spherical projection to the ellipsoid. Thegraticule for this mapping is shown in Fig. 1(a). Kruger (1912,§8) now “rectifies” this mapping by applying a near-identitytransformation toζ′ to make the scale constant which yieldsthe Gauss–Kruger mappingζ = ξ + iη with
ζ = ζ′ +
∞∑
j=1
αj sin 2jζ′, (5)
whereαj is real (this form for the transformation is derivedin Sect. 4). Similarly the transformation fromζ′ to ζ can bewritten as
ζ′ = ζ −∞∑
j=1
βj sin 2jζ, (6)
whereβj is real. Kruger’s expressions forαj andβj are givenbelow, Eqs. (12) and (17), and we outline their derivation inSect. 4.
First, I address the computation ofζ′ givenφ andλ withspecial emphasis on maintaining numerical accuracy. Follow-ing Kruger, I writeζ′ = ξ′ + iη′ and give separate equationsfor ξ′ andη′. However, in order to maintain accuracy nearφ = ± 1
2π, I useτ = tanφ andτ ′ = tanφ′ and eliminate
φ′ andψ from the relations. An expression forτ ′ is found bytaking the tangent of Eq. (4) and using the addition rule forthe hyperbolic sine to give
τ ′ = τ√
1 + σ2 − σ√
1 + τ2, (7)
where
τ = tanφ, (8)
σ = sinh(
e tanh−1(eτ/√
1 + τ2))
. (9)
Eliminating φ′ from the expressions forξ′ and η′ (Kruger,1912, Eq. (8.36)) yields
ξ′ = tan−1(τ ′/ cosλ),
η′ = sinh−1(
sinλ/
√
τ ′2 + cos2 λ)
.(10)

3
Splitting Eq. (5) into real and imaginary parts gives
ξ = ξ′ +
∞∑
j=1
αj sin 2jξ′ cosh 2jη′,
η = η′ +∞∑
j=1
αj cos 2jξ′ sinh 2jη′,
(11)
where (Kruger, 1912, Eq. (8.41))
α1 =1
2n− 2
3n2 +
5
16n3 +
41
180n4 + · · · ,
α2 =13
48n2 − 3
5n3 +
557
1440n4 + · · · ,
α3 =61
240n3 − 103
140n4 + · · · ,
α4 =49561
161280n4 + · · · .
(12)
Finally, ξ and η are scaled to give the transverse Mercatoreastingx and northingy,
x = k0Aη, y = k0Aξ, (13)
wherek0 is the scale on the central meridian,2πA is the cir-cumference of a meridian, and (Kruger, 1912, Eq. (5.5))
A =a
1 + n
(
1 +1
4n2 +
1
64n4 + · · ·
)
. (14)
Typically k0 is chosen to be slightly less than1 to minimizethe deviation of the scale from unity in some region aroundthe central meridian.
Converting from transverse Mercator to geographic coordi-nates entails reversing these steps. Equations (13) give
η = x/(k0A), ξ = y/(k0A). (15)
Kruger (1912,§7) writesζ′ in terms ofζ by inverting Eq. (11)to give
ξ′ = ξ −∞∑
j=1
βj sin 2jξ cosh 2jη,
η′ = η −∞∑
j=1
βj cos 2jξ sinh 2jη,
(16)
where (Kruger, 1912, Eq. (7.26*))
β1 =1
2n− 2
3n2 +
37
96n3 − 1
360n4 + · · · ,
β2 =1
48n2 +
1
15n3 − 437
1440n4 + · · · ,
β3 =17
480n3 − 37
840n4 + · · · ,
β4 =4397
161280n4 + · · · .
(17)
Inverting Eq. (10) gives (Kruger, 1912, Eq. (7.25))
τ ′ = sin ξ′/
√
sinh2 η′ + cos2 ξ′,
λ = tan−1(sinh η′/ cos ξ′).(18)
Equation (7) may be inverted by Newton’s method,
τi =
{
τ ′, for i = 0,
τi−1 + δτi−1, otherwise,(19)
τ ′i = τi√
1 + σ2i − σi
√
1 + τ2i , (20)
δτi =τ ′ − τ ′i√1 + τ ′2i
1 + (1− e2)τ2i
(1 − e2)√1 + τ2i
. (21)
This usually converges to round-off after two iterations, i.e.,τ = τ2, which gives
φ = tan−1 τ. (22)
The meridian convergence and scale can be found duringthe forward mapping by differentiating Eq. (5) and writing
p′ − iq′ =dζ
dζ′,
or
p′ = 1 +
∞∑
j=1
2jαj cos 2jξ′ cosh 2jη′,
q′ =
∞∑
j=1
2jαj sin 2jξ′ sinh 2jη′.
(23)
Then the meridian convergence (the bearing of grid north, they axis, measured clockwise from true north) is given byγ =γ′ + γ′′, where (Kruger, 1912, Eqs. (8.44–45))
γ′ = tan−1(
(τ ′/√
1 + τ ′2) tanλ)
,
γ′′ = tan−1(q′/p′).(24)
The scale is given byk = k0k′k′′, where (Kruger, 1912,
Eq. (8.47))
k′ =√
1− e2 sin2 φ√
1 + τ2/
√
τ ′2 + cos2 λ,
k′′ =A
a
√
p′2 + q′2.(25)
Hereγ′ andk′ give the convergence and scale for the spheri-cal transverse Mercator projection, whileγ′′ andk′′ give thecorrections due to Eqs. (5) and (13).
To determine the convergence and scale during the reversemapping, differentiate Eq. (6) and write
p+ iq =dζ′
dζ=
1
p′ − iq′,
or
p = 1−∞∑
j=1
2jβj cos 2jξ cosh 2jη,
q =∞∑
j=1
2jβj sin 2jξ sinh 2jη.
(26)

4
The convergence is given byγ = γ′ + γ′′, where (Kruger,1912, Eqs. (7.31–31*))
γ′ = tan−1(tan ξ′ tanh η′),
γ′′ = tan−1(q/p).(27)
The scale is given byk = k0k′k′′, where (Kruger, 1912,
Eq. (7.33))
k′ =√
1− e2 sin2 φ√
1 + τ2√
sinh2 η′ + cos2 ξ′,
k′′ =A
a
1√
p2 + q2.
(28)
In summary, Kruger’s methods for the forward and re-verse mappings are given by the numbered Eqs. (7)–(14) andEqs. (14)–(22), respectively. The scale and meridian conver-gence are similarly given by the Eqs. (23)–(25) during the for-ward mapping and Eqs. (26)–(28) during the reverse mapping.
Kruger truncates the series at ordern4, as shown here. Thisresults in very small errors, considering that Kruger publishedhis paper in 1912. The maximum of the errors for the forwardand reverse mappings (both expressed as true distances) is0.31µm within 1000 km of the central meridian and is1mmwithin 6000 km of the central meridian. The truncated map-ping is exactly conformal; however Eqs. (5) and (6) are notinverses of one another if the sums are truncated. It is, ofcourse, possible to construct an exact inverse of the truncationof Eq. (5), e.g., by solving it using Newton’s method. How-ever, in practice, it is better merely to retain enough termsinthe sum so that the truncation error is less than the round-offerror.
In numerically implementing this method, the termsA, αj ,andβj , Eqs. (14), (12), and (17), need only be computed oncefor a given ellipsoid and, for accuracy and speed, should beevaluated in Horner form (DLMF, §1.11(i)); for example,α1
is evaluated to ordern4 as
α1 =(
1
2+(
− 2
3+ ( 5
16+ 41
180n)n
)
n)
n.
Furthermore the trigonometric series, Eqs. (11), (16), (23),and (26), can be evaluated using Clenshaw (1955) summation(DLMF, §3.11(ii)) which minimizes the number of evaluationsof trigonometric and hyperbolic functions. Thus Eqs. (11) and(23) may be summed to orderJ with
cJ+1 = cJ+2 = 0,
cj = 2cj+1 cos 2(ξ′ + iη′)− cj+2 + αj ,
ξ + iη = ξ′ + iη′ + c1 sin 2(ξ′ + iη′),
and
dJ+1 = dJ+2 = 0,
dj = 2dj+1 cos 2(ξ′ + iη′)− dj+2 + 2jαj ,
p′ + iq′ = 1− d2 + d1 cos 2(ξ′ + iη′),
separated into real and imaginary parts and with the recursionrelations forcj anddj evaluated forJ ≥ j > 0. The summa-tions of Eqs. (16) and (26) are handled in a similar fashion.
My introduction to Kruger’s expansion was a report bythe Finnish Geodetic Institute (Kuittinenet al., 2006). Themethod described here follows this report with a few changesto improve the numerical accuracy: (a) I use more stable for-mulas for converting from geographic to the spherical trans-verse Mercator coordinates; (b) I solve for the geographic lati-tude by Newton’s method instead of by iteration; and (c) I useKruger’s method for determining the convergence and scaleinstead of less accurate expansions in the longitude.
In contrast to the series given here, the formulas given byKruger in a later section of his paper,§14, involve an expan-sion in the longitude difference instead of the flattening. Thisexpansion forms the basis of the approximate transverse Mer-cator formulas presented by Thomas (1952, pp. 2–6) and inthe report on UTM (Hageret al., 1989, Chap. 2) and are usedin Geotrans (2010). For computing UTM coordinates, the er-rors are less than1mm. Unfortunately, the truncated seriesdoes not define an exact conformal mapping. In addition, insome applications, use of these series may lead to unaccept-ably large errors. For example, consider mapping Greenlandwith transverse Mercator with a central meridian of42◦W.The landmass of Greenland lies within750 km of this cen-tral meridian and the maximum variation in the scale of trans-verse Mercator is only0.7%—in other words, the transverseMercator projection is ideal for this application. The error incomputing transverse Mercator with Kruger’s 4th order seriesis (as we have seen) less than1µm. However the maximumerror using Thomas’ series (as implemented in Geotrans, ver-sion 3.0) is over1 km.
3. EXACT MAPPING
The definition of the transverse Mercator projection givenat the beginning of Sect. 1 serves to specify the mapping com-pletely. (There are two minor qualifications to this statement:the central scale, the origin, and the orientation of the cen-tral meridian need to be specified; in addition, the mappingbecomes multi-valued very far from the central meridian asdetailed in Sect. 5.) Provided that the series in Eqs. (5), (6),and (14) are convergent, the Kruger series method convergesto the exact Gauss–Kruger projection and the truncated seriesare a useful basis for numerical approximations to the map-ping.
There is no problem with the convergence of expression forA, Eq. (14). This can be written in closed form as
A =2a
πE(e) =
2a
πE(
4n/(1 + n)2)
,
whereE(k) is the complete elliptic integral of the second kindwith modulusk (DLMF, Eq. (19.2.8)), which may be expandedin a series usingDLMF, Eq. (19.5.2) to give
A =a
1 + n
(
1+ 1
4n2+ 1
64n4+ 1
256n6+ 25
16384n8+ · · ·
)
. (29)
This series converges for|n| < 1 and, for smalln, the relativeerror in truncating the series is given by the first dropped term.

5
The convergence of Eqs. (5) and (6) is more complicatedbecause the sine terms in the summands become large forlarge η or η′. Indeed, the transverse Mercator projectionhas a singularity in its second derivative atφ = 0◦ andλ = ±λ0 whereλ0 = (1 − e)90◦ beyond which the serieswill diverge; these points are branch points of the mapping(Whittaker and Watson, 1927,§5.7) and the properties of themapping in their vicinity are explored in Sect. 5. In order todetermine the error in the truncated series, I implement theformulas for theexactmapping as given by Lee (1976,§§54–55) who credits E. H. Thompson (1945) for their development.A referee has pointed out to me that a similar formulation wasindependently provided by Ludwig (1943). Here I give only abrief description of Lee’s method, referring the reader to thedocumentation and source code for GeographicLib for moredetails (Karney, 2010).
The exact mapping is expressed in terms of an intermediatemapping, the Thompson projection, denoted byw = u + ivwith (Lee, 1976, Eqs. (54.5) and (55.5))
χ = tanh−1 snw − e tanh−1(e snw), (30)
ζ =π
2E(e)
(
E(e)− E(K(e)− w, e))
, (31)
wheresnu is one of the Jacobi elliptic functions with moduluse (DLMF, §22.2),K(k) is the complete elliptic integral of thefirst kind with modulusk (DLMF, Eq. (19.2.8)), andE(x, k) isJacobi’s epsilon function (DLMF, Eq. (22.16.20)).
When implementing these equations, I follow Lee andbreak the formulas in terms of their real and imaginary parts.This enables the algorithm to be implemented with real arith-metic which allows the expressions to be optimized to mini-mize the round-off error. The necessary formulas for Eqs. (30)and (31) are given by Lee (1976, Eqs. (54.17) and (55.4)).
The computation of the forward (resp. reverse) mapping re-quires the inversion of Eq. (30) (resp. Eq. (31)). I performthese inversions using Newton’s method in the complex plane.The needed derivative ofχ is given by Lee (1976, Eq. (54.21))anddζ/dw is given by Lee (1976, Eq. (55.9)) which may besplit into real and imaginary parts withDLMF, Eq. (22.8.3),§22.6(iv). The starting guesses for Newton’s method are ob-tained by finding approximate solutions using one of threemethods: (a) by using the limite → 0, (b) by expandingabout the branch point on the equator (the bottom right cornerof Fig. 3(c)), or (c) by expanding about the singularity at thesouth pole (the top right corner of Fig. 3(c)). (The latter twomethods require a knowledge of the properties of the mappingfar from the central meridian; see Sect. 5 for more informa-tion.) The most time-consuming task in this implementationwas optimizing the choice of starting point to ensure that themethod converges in a few iterations. I refer the reader to thecode for details. I also compute the meridian convergence andscale using Lee (1976, Eqs. (55.12–13)).
In order to reduce the round-off errors, I needed to identifyterms in the formulas with the potential for a loss of precisionand apply identities for the Jacobi elliptic functions (DLMF,Eq. (22.2.10),§22.6(i)) to recast the formulas into equivalentones with better numerical properties. I use the proceduresncndn given by Bulirsch (1965) for the elliptic functions and
algorithmsRF ,RD, andRG of Carlson (1995) for the ellipticintegrals; these algorithms can yield results to arbitrarypreci-sion.
I provide two implementations of the exact mapping: (a) aC++ version using standard floating-point arithmetic and(b) an implementation in Maxima (2009). The latter imple-mentation makes use of Maxima’s “bigfloat” package whichpermits the calculation to be carried out to an arbitrary pre-cision. This was used to construct a large test set for themapping which served to benchmark the C++ implementa-tion. This set includes randomly distributed points togetherwith additional points chosen close to the pole and other pos-sibly problematic points and lines. The mapping is computedto an accuracy of 80 decimal digits and the results are roundedto the nearest0.1 pm. Both the C++ and Maxima implementa-tions of the exact mapping and the test data are provided withGeographicLib (Karney, 2010).
The C++ implementation was checked by computing themaximum of the error in the forward mapping expressed asa true distance (i.e., dividing the error in the mapped spaceby the scale of the mapping) and the error in the reversemapping (again expressed as a true distance). When imple-mented using double (resp. extended) precision, the maximumround-off error isδr = 9nm (resp.5 pm) over the wholeellipsoid (using the WGS84 parameters,a = 6 378 137mand f = 1/298.257 223 563). These are consistent withδr ≈ M/2p−3 indicating that the error is only about 8 timesthe limiting round-off error given in Sect. 1. The truncationerrorδt, defined in Sect. 4, is zero for this method.
Using the double precision implementation, the errors inthe meridian convergence and scale at a particular point arebounded by
δγr <1
2p−3
(
1 +M
sp+ 1.5 3
√
M
sb
)
180◦
π,
δkrk
<1
2p−3
(
1 + 1.5 3
√
M
sb
)
,
wheresp andsb are the geodesic distances from the point tothe closest pole and closest branch point, respectively. Thesebounds were found empirically; however the form of the ex-pressions is determined by the nature of the singularities inthe mapping. The term involvingsp arises because small er-rors in the position close to the pole may cause large changesin the convergence. Similarly the terms involvingsb appearbecause of the singularity in the second derivative of the map-ping which causes the convergence and scale to vary rapidlynear the branch point.
The differences between my implementation and that ofDozier (1980) are as follows. (a) Dozier’s starting guessesforNewton’s method are based only on the limite → 0. New-ton’s method then fails to converge in the neighborhood of thebranch point (where ellipsoidal effects become large). In con-trast, I use different methods for computing the starting pointsin different regions which enables Newton’s method to con-verge everywhere. (b) I modified several of the equations toimprove the numerical accuracy. Without this, Dozier losesabout half the precision in some regions. (c) I use published

6
0 0.5 1 1.5 2 2.50
0.5
1
x
y(a)
0 0.5 1 1.5 2 2.50
0.5
1
x
y
(b)
0 0.5 1 1.5 2 2.50
0.5
1
x
y
(c)
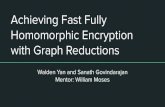
FIG. 1 Graticules for the (a) spherical transverse Mercator,(b) Gauss–Kruger, and (c) Thompson projections. Herex andy arethe easting and northing for the mappings. The eccentricityise = 1
10
(f ≈ 1/199.5) and the mappings have been scaled so that the dis-tance from the equator to the north pole is unity. Thusλ = 0◦ mapsto the linex = 0 andλ = 90◦ maps to the liney = 1. The graticuleis shown at multiples of10◦ with 1◦ lines added in80◦ < λ < 90◦
and0 < φ < 10◦.
algorithms to evaluate the special functions (Bulirsch, 1965;Carlson, 1995). (d) I compute the meridian convergence andscale. (e) Lastly, I provide an arbitrary precision implementa-tion (in Maxima) to allow the errors in the C++ implementa-tion to be measured accurately.
Figures 1(b) and (c) show the graticule for the Gauss–Kruger and Thompson projections. One eighth of the ellip-soid is shown in these figures,0◦ ≤ φ ≤ 90◦ and0◦ ≤ λ ≤90◦, and (unlike the spherical transverse Mercator projection,Fig. 1(a)) this maps to a finite area with the Gauss–Krugerand Thompson projections. To obtain the graticule for theentire ellipsoid, reflect these figures inx = 0, y = 0, andy = 1. The eccentricity for these figures ise = 1
10and, in this
case, the equator runs alongy = 0 until the branch point atλ = λ0 = 81◦ and then heads fory = 1; the pointφ = 0◦,λ = 90◦ maps to finite points ony = 1. The Thompsonmapping is not conformal at the branch point (where there’s akink in the equator), becausedχ/dw vanishes there. Similar
figures are given by Lee (1976, Figs. 43–46).
4. EXTENDING KRUGER’S SERIES
There are several ways that the series forA, αj andβj canbe generated; here, I adopt an approach which is close to thatused by Kruger (1912,§5). (Alternative methods are to ex-pand Eqs. (30) and (31) or to use the polar stereographic pro-jection instead of the Mercator projection as the starting point(Wallis, 1992).) In the limitη = η′ = 0 (i.e., on the centralmeridian,λ = 0), the quantitiesζ andζ′ become the recti-fying and conformal latitudes respectively. (The conformallatitudeφ′ was introduced in Sect. 2; the rectifying latitudeis linearly proportional to the distance along a meridian mea-sured from the equator.) The transformation betweenζ andζ′
is thus given by the relation between the rectifying and con-formal latitudes extended to the complex plane. Thusζ is themeridian distance scaled toπ/2,
ζ(Φ) =π
2E(e)
∫ Φ
0
1− e2
(1 − e2 sin2 φ)3/2dφ, (32)
whereΦ is the normal geographic latitude extended to thecomplex plane. The integral here can be expressed in termsof elliptic integrals asE(e) − E(Θ, e), whereE(φ, k) isthe incomplete elliptic integral of the second kind with ar-gumentφ and modulusk (DLMF, Eq. (19.2.5)), andΘ =cot−1
(
(1− f) tanΦ)
is the parametric co-latitude. Similarly,ζ′ is merely Eq. (4) extended to the complex plane.
ζ′(Φ) = gd(
gd−1 Φ− e tanh−1(e sinΦ))
. (33)
The quantitiesΦ andΘ are related to the Thompson projectionvariablew by
Φ = amw, Θ = am(K(e)− w),
w = F (Φ, e) = K(e)− F (Θ, e),(34)
whereamw is Jacobi’s amplitude function (DLMF, §22.16(i))with moduluse andF (φ, k) is the incomplete elliptic inte-gral of the first kind with argumentφ and modulusk (DLMF,Eq. (19.2.4)). Substituting Eq. (34) into Eqs. (33) and (32)and using Eq. (2) andDLMF, Eq. (22.16.31) gives Eqs. (30)and (31); this establishes the equivalence of Eqs. (32) and(33) with the formulation of Lee (1976). These equations areused by Stuifbergen (2009) as the basis for an exact numericalmethod for the transverse Mercator projection. This is similarto (but rather simpler than) the method of Dozier (1980).
The functionsζ(Φ) and ζ′(Φ) are analytic and so defineconformal transformations. They can be expanded as a Tay-lor series ine2, or equivalently inn; I use the method ofLagrange (1770,§16) (Whittaker and Watson, 1927,§7.32)to invert these series to give the inverse functionsΦ(ζ) andΦ(ζ′). For example, if
ζ(Φ) = Φ + g(Φ),
whereg(Φ) = O(n), then the inverse function is
Φ(ζ) = ζ + h(ζ),

7
where
h(ζ) =
∞∑
j=1
(−1)j
j!
dj−1g(Φ)j
dΦj−1
∣
∣
∣
∣
Φ=ζ
.
Now composeζ(
Φ(ζ′))
andζ′(
Φ(ζ))
to provide the requiredseries, Eqs. (5) and (6). These manipulations were carried outusing the algebraic tools provided by Maxima (2009). Littleeffort was expended to optimize this calculation since it onlyneeds to be carried out once! (The expansion to ordern8 takesabout 15 seconds.) At 8th order, the series forA is givenby Eq. (29) and the series forαj , Eq. (12), andβj , Eq. (17),become
α1 = 1
2n− 2
3n2 + 5
16n3 + 41
180n4 − 127
288n5 + 7891
37800n6
+ 72161
387072n7 − 18975107
50803200n8 + · · · ,
α2 = 13
48n2 − 3
5n3 + 557
1440n4 + 281
630n5 − 1983433
1935360n6
+ 13769
28800n7 + 148003883
174182400n8 + · · · ,
α3 = 61
240n3 − 103
140n4 + 15061
26880n5 + 167603
181440n6 − 67102379
29030400n7
+ 79682431
79833600n8 + · · · ,
α4 = 49561
161280n4 − 179
168n5 + 6601661
7257600n6 + 97445
49896n7
− 40176129013
7664025600n8 + · · · ,
α5 = 34729
80640n5 − 3418889
1995840n6 + 14644087
9123840n7
+ 2605413599
622702080n8 + · · · ,
α6 = 212378941
319334400n6 − 30705481
10378368n7 + 175214326799
58118860800n8 + · · · ,
α7 = 1522256789
1383782400n7 − 16759934899
3113510400n8 + · · · ,
α8 = 1424729850961
743921418240n8 + · · · , (35)
and
β1 = 1
2n− 2
3n2 + 37
96n3 − 1
360n4 − 81
512n5 + 96199
604800n6
− 5406467
38707200n7 + 7944359
67737600n8 + · · · ,
β2 = 1
48n2 + 1
15n3 − 437
1440n4 + 46
105n5 − 1118711
3870720n6
+ 51841
1209600n7 + 24749483
348364800n8 + · · · ,
β3 = 17
480n3 − 37
840n4 − 209
4480n5 + 5569
90720n6 + 9261899
58060800n7
− 6457463
17740800n8 + · · · ,
β4 = 4397
161280n4 − 11
504n5 − 830251
7257600n6 + 466511
2494800n7
+ 324154477
7664025600n8 + · · · ,
β5 = 4583
161280n5 − 108847
3991680n6 − 8005831
63866880n7
+ 22894433
124540416n8 + · · · ,
β6 = 20648693
638668800n6 − 16363163
518918400n7
− 2204645983
12915302400n8 + · · · ,
β7 = 219941297
5535129600n7 − 497323811
12454041600n8 + · · · ,
β8 = 191773887257
3719607091200n8 + · · · . (36)
GeographicLib (Karney, 2010) includes the Maxima code forcarrying out these expansions and the results of expanding theseries much further, to ordern30.
Equations (29), (35), and (36) allow the Kruger method tobe implemented to any order up ton8. In order to determine
which order to use in a given application, it is useful to dis-tinguish the truncation error (the difference between the seriesevaluated exactly and the exact mapping) from the round-offerror (the difference between the series evaluated at finitepre-cision and the series evaluated exactly).
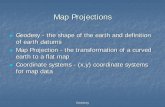
The truncation error was determined using Maxima’s big-floats with a precision of 80 decimal digits. With Kruger’sseries the error is principally a function of distance from themeridian (which is mainly a function ofx) and depends onlyweakly on y. Defining sm as the geodesic distance fromthe central meridian, I measureδt the maximum of the for-ward and reverse truncation errors (both expressed as true dis-tances) over all points with a givensm. In Fig. 2, I plotδt as afunction ofsm, for truncations at various ordersJ (the small-est terms retained arenJ ). The errors rise monotonically withthe distance from the central meridian. The branch point atφ = 0◦ andλ = λ0 ≈ 82.636◦ is at aboutsm = 9200 km. Atthis point the truncation error stops decreasing with increas-ing order indicating a lack of convergence in the series. (SeeSect. 5 for a proof.) From a practical standpoint, the conver-gence is too slow to be useful forsm & 8000 km. The trunca-tion errors in the meridian convergenceδγt and scaleδkt arewell approximately by
δγt = 2J sec(sm/a)δta
180◦
π,
δktk
= 2J sec(sm/a)δta.
Here, the factor2J arises from the differentiation performedto give Eqs. (23) and (26) and the termsec(sm/a) is the scale(in the spherical limit) necessary to convert the errors in posi-tion to errors inζ or ζ′.
Figure 2 epitomizes the advantages of Kruger’s overThomas’ series. The equivalent figure for truncation error forthe latter series would use thelongituderelative the centralmeridian for the abscissa instead of thedistancefrom the cen-tral meridian. At high latitudes, the longitude differencebe-comes large even for modest distances from the central merid-ian; this explains the large errors in the results from Geotransin the Greenland example at the end of Sect. 2.
Round-off errors need to be considered also when imple-menting the method with floating-point arithmetic. Evaluatingthe mapping using the formulas given in Sect. 2 adds4.2 nmor 1.9 pm to the truncation error depending on the precision(see the dashed lines in Fig. 2). These round-off errors maybe expressed asδr ≈ M/2p−2; i.e., they are about half ofthose for the exact algorithm, because the series method in-volves fewer operations. Thus with double (resp. extended)precision and the series truncated atJ = 6 (resp.J = 8)the overall error is less than5 nm (resp.2 pm) provided thatsm < 3900 km (resp.4200 km). The C++ implementationof the mapping based on the extended Kruger series (taken toordern8) is included in GeographicLib (Karney, 2010).
At greater distances from the central meridian, truncationerrors become large; thus the 6th order series has an error ofabout1mm at sm = 7600 km (see Fig. 2). The truncationerror can be decreased by increasing the number of terms re-tained in the series. However, if high accuracy is required for

8
0 3000 6000 9000
sm
(km)
δ (m
)
J = 2
3
5
7
8
9
10
11 J = 12
p = 53
p = 64
10−24
10−18
10−12
10−6
100
FIG. 2 Truncation and round-off errors,δt and δr, in the Krugerseries for the transverse Mercator projection as a functionof the dis-tance from the central meridiansm. The series is truncated at variousordersJ from 2 to 12. The solid lines show theδt. Also shown indashed lines are the combined round-off and truncation errors,δt+δrwhen the algorithm is implemented with floating-point numbers withp bits of fraction. Forp = 53 (double) andp = 64 (extended), thetruncation levels are set toJ = 6 and J = 8 respectively. TheWGS84 ellipsoid is used.
sm & 4000 km, it’s probably safer to use the exact algorithmwhose error is less than9 nm for the whole spheroid.
The round-off errors in the meridian convergence and scaleare bounded by
δγr <1
2p−3
(
1 + 0.5M
sp
)
180◦
π,
δkrk
<1
2p−3;
these should be added toδγt andδkt. These expressions havethe same form as those for the exact algorithm, except that theterms involvingsb are omitted because the truncation errordominates near the branch point.
Previously, Engsager and Poder (2007) extended Kruger’sseries to 7th order. However they give a less rigorous esti-mate of the error. In addition, they give separate series forthe meridian convergence and scale, while I advocate follow-ing Kruger’s simpler prescription of differentiating thesameseries used to carry out the mapping. They also give a seriesexpansion for the transformation between latitude and con-formal latitude which leads to a somewhat faster code (seeSect. 6); however, I prefer the simplicity of evaluating andinverting Eq. (7) directly.
5. PROPERTIES FAR FROM THE CENTRAL MERIDIAN
In this section, I explore the behavior of the mapping in thevicinity of the branch point atφ = 0◦ andλ = λ0. First itshould be remarked that this is far from the central meridianand that the scale there isk0/e; so this is not in the domainwhere the mapping is very useful. Nevertheless, it is benefi-cial to have a complete understanding of a mapping; for exam-ple, this was necessary in making the exact algorithm robust.Here I describe the mapping in terms of the Thompson map-ping,w (Lee, 1976,§§54–55). Konig and Weise (1951) offera complementary picture based on the complex latitudeΦ.
The transverse Mercator projection is defined by its prop-erties on the central meridian and the condition of confor-mality. The mapping is defined by analytically continuing(Whittaker and Watson, 1927, Chap. 5) the mapping awayfrom the central meridian. The process continues until thebranch point is encountered (where the condition of analyt-icity fails). The branch point corresponds toχ = χ0 = iλ0,ζ = ζ0 = i(K ′−E′)π/(2E), andw = w0 = iK ′, whereE =
E(e), E′ = E(√1− e2), K = K(e), K ′ = K(
√1− e2),
andK(k) is the complete elliptic integral of the first kind withmodulusk (DLMF, Eq. (19.2.8)). The lowest order terms inthe expansions ofχ andζ about the branch point are
χ = − 1
3e(1− e2)
[
w3 + 1
10(1 + e2)w5 + · · ·
]
,
ζ = − 1
3(1 − e2)
[
w3 + 1
5(2− e2)w5 + · · ·
]
π/(2E),
whereχ = χ−χ0, ζ = ζ− ζ0, andw = w−w0. Eliminatingw from these equations gives
ζ =π
2E
[
χ
e+i 3√1− e2
10
(
3iχ
e
)5/3
+O(χ7/3)
]
. (37)
The value ofζ will depend on how the53
power is taken. Pick-ing the complex phase ofiχ in the interval(−π, π] gives theprincipal value. Equivalently, the value ofζ(χ) can be madesingle valued by placing “cuts” on the equator in the longi-tude ranges(1 − e)90◦ ≤ |λ| ≤ (1 + e)90◦ which act asimpassable barriers during the process of analytic continua-tion. This represents the “standard” convention for mapping ageographic position to the Gauss–Kruger projection sincethesign of the northing matches the sign of the latitude (with theequator mapping to non-negative northings). This conventioncorresponds to Fig. 1(b) (after suitable reflections to cover theellipsoid), to Lee (1976, Fig. 46), to Konig and Weise (1951,Fig. 55(b)), and to Ludwig (1943, p. 214).
From the form of the mapping near the branch point, it isclear that the Kruger series does not converge forφ = 0 andλ > λ0 because, from Eq. (37),ζ is complex under theseconditions but all the terms in the series, Eq. (5), are pureimaginary. Delineating the precise boundary for convergenceof the series and its inverse, Eq. (6), requires an analysis of theproblem for complexe and is beyond the scope of this work.
It is possible to extend the mapping by moving to the“right” of the equator in Fig. 1(b). If the complex phase ofiχ includes the interval[0, 3
2π], an “extended” domain for the
mapping may be defined by the union of0◦ ≤ φ ≤ 90◦,

9
0 0.5 1 1.5 2 2.5 3 3.5−0.5
0
0.5
1
x
y
(a)
0 0.5 1 1.5 2 2.5 3 3.5−0.5
0
0.5
1
x
y
(b)
0 0.5 1 1.5 20
0.5
1
x
y
(c)
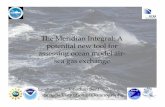
FIG. 3 Extended transverse Mercator projection. (a) shows thegraticule and (b) the convergence and scale for Gauss–Kruger pro-jection. (c) shows the graticule for the Thompson projection. Theellipsoid parameters are the same as for Fig. 1. The graticules in (a)and (c) are the same as in Fig. 1(b) with the addition of1◦ lines for80◦ < λ < 90◦ and−10◦ ≤ φ < 0◦. In (b), the lines emanatingfrom the top left corner are lines of constant meridian convergence,γ,at10◦ intervals. The dog-legged line joining(0, 1), (0, 0), (1.71, 0),and(1.71,−∞) representsγ = 0◦. The liney = 1 givesγ = 90◦.The other lines (running primarily vertically in the figure)are linesof constant scalek. The solid lines show integer values ofk for1 ≤ k ≤ 15 and multiples of 5 for15 ≤ k ≤ 35. The line segmentjoining (0, 0) and(0, 1) givesk = 1. The dashed lines show lines ofconstantk at intervals of0.1 for 1 < k < 2.
0◦ ≤ λ ≤ 90◦ and−90◦ < φ ≤ 0◦, λ0 ≤ λ ≤ 90◦.The rule for analytic continuation is that the second regionisreached by a path from the central meridian which goes northof the branch point. This is equivalent to placing the cut sothat it emanates from the branch point in a south-westerly di-rection. Following this prescription, the range of the mappingnow consists of the union of0 ≤ x, 0 ≤ y/(k0a) ≤ E andK ′ − E′ ≤ x/(k0a), y ≤ 0.
Figures 3(a) and (b) illustrate the properties of the Gauss–Kruger projection in this extended domain. These figures usean ellipsoid with eccentricitye = 1
10(as in Fig. 1) and with
a = 1/E = 0.6382 andk0 = 1. The branch point then lies
at φ = 0◦, λ = 81◦ or x = (K ′ − E′)/E ≈ 1.71, y = 0.Symmetries can now be employed to extend the mapping witharbitrary rules for how to circumvent the branch point. Thesymmetries are equivalent to placing mirrors on the four linessegments:0 ≤ x, y = 1; x = 0, 0 ≤ y ≤ 1; 0 ≤ x ≤1.71, y = 0; andx = 1.71, y ≤ 0. Compare Fig. 3(a) withKonig and Weise (1951, Fig. 53(b)).
Figure 3(c) shows the graticule of the Thompson projectionin the extended domain; the range of this mapping is the rect-angular region shown,0 ≤ x/(k0a) ≤ K ′, 0 ≤ y/(k0a) ≤K. The extended Thompson projection has reflection sym-metry on all the four sides of Fig. 3(c). In transforming fromThompson to Gauss–Kruger, the right angle at the lower rightcorner of Fig. 3(c) expands by a factor of 3 to270◦ to pro-duce the outside corner atx = 1.71, y = 0 in Fig. 3(a). Thetop right corner of Fig. 3(c) represents the south pole and thisis transformed to infinity in the extended Gauss–Kruger pro-jection. Despite the apparent similarities, the behavior of theextended Thompson projection near the north and south poles(the top left and top right corners in Fig. 3(c)) is rather dif-ferent. Although the mapping at north pole is conformal, themapping at the south pole in the extended domain is not. Thedifference in longitude between the two meridians representby the top and right edges of Fig. 3(c) is90◦e instead of90◦.
My implementation of the exact mapping provides the op-tion of using the extended domain. The round-off errorsquoted in Sect. 3 (9 nm for double precision and5 pm for ex-tended precision) apply to the extended domain forφ > −15◦.Beyond this line, the errors grow because of the contractionofw space near the south pole (atφ = −58◦, the error is about1mm).
6. CONCLUSION
The algorithms presented here allow the transverse Mer-cator projection to be computed with an accuracy of a fewnanometers. Implementations of these algorithms are in-cluded in GeographicLib (Karney, 2010) which also provides(a) the set of test data used to check the implementations,(b) Maxima code for the exact mapping (with arbitrary preci-sion), (c) Maxima code for generating the Kruger series to ar-bitrary order, and (d) the Kruger series to 30th order. The webpage http://geographiclib.sf.net/tm.html provides quick linksto all these resources.
The work described in this paper made heavy use of thecomputer algebra system Maxima (2009) both for carryingout the series expansions for Kruger’s method and for gen-erating the high accuracy test data. The latter is invaluablewhen developing complex algorithms with an accuracy closeto machine precision. Other computer algebra systems offersimilar capabilities; but Maxima is one of the few that is free.
My emphasis in developing these algorithms was in theiraccuracy. Nevertheless the resulting implementations arerea-sonably fast. On a2.66GHz Intel processor and compiledwith g++, the time for the mappings implemented with the 6thorder series method is1.91µs; this is the combined time for aforward and a reverse mapping including the computation of

10
the convergence and scale in each case. This time is insen-sitive to number of terms retained in the sum due to the effi-ciency of Clenshaw summation—changing this to 4 (resp. 8)decreases (resp. increases) the time by only1%. Skipping thecalculation of the convergence and scale reduces the time by15%. Using a trigonometric series and Clenshaw summationfor the conversions between geographic and conformal lati-tude (as proposed by Engsager and Poder (2007)) decreasesthe time by18%. The exact algorithms (which are accurateover the entire ellipsoid) are5–6 times slower. The 6th orderseries method is comparable in speed to Geotrans 3.0 eventhough the latter is much less accurate and does not return theconvergence and scale.
Here are some recommendations for users of the transverseMercator projection. Do not use algorithms based on the for-mulas given by Thomas (1952)—they are unnecessarily in-accurate. Instead use the Kruger series, truncating Eqs. (29),(35), and (36) to ordern6. With double precision, this gives anaccuracy of5 nm for distances up to3900 km from the cen-tral meridian. If the mapping is needed at greater distancesfrom the central meridian, use the algorithm based on the ex-act mapping (an accuracy of9 nm). If greater accuracy isneeded, use extended precision with either method (extend-ing the series method to 8th order). When implementing thesealgorithms, use the test set to verify that the errors are compa-rable with those given here.
Acknowledgments
I would like to thank Rod Deakin and Knud Poder for help-ful discussions.
References
L. M. Bugayevskiy and J. P. Snyder, 1995,Map Projections: A Ref-erence Manual(Taylor & Francis, London), http://www.worldcat.org/oclc/31737484.
R. Bulirsch, 1965, Numerical calculation of elliptic inte-grals and elliptic functions, Num. Math., 7(1), 78–90, doi:10.1007/BF01397975.
B. C. Carlson, 1995,Numerical computation of real or com-plex elliptic integrals, Numerical Algorithms,10(1), 13–26, doi:10.1007/BF02198293, E-print arXiv:math/9409227.
C. W. Clenshaw, 1955,A note on the summation of Chebyshev series,Math. Tables Aids Comput.,9(51), 118–120, http://www.jstor.org/stable/2002068.
J. Dozier, 1980,Improved algorithm for calculation of UTM andgeodetic coordinates, Technical Report NESS 81, NOAA, http://fiesta.bren.ucsb.edu/∼dozier/Pubs/DozierUTM1980.pdf.
K. E. Engsager and K. Poder, 2007,A highly accurate world widealgorithm for the transverse Mercator mapping (almost), in Proc.XXIII Intl. Cartographic Conf. (ICC2007), Moscow, p. 2.1.2.
Geotrans, 2010,Geographic translator, version 3.0, http://earth-info.nga.mil/GandG/geotrans/.
J. W. Hager, J. F. Behensky, and B. W. Drew, 1989,The universalgrids: Universal Transverse Mercator (UTM) and Universal Po-lar Stereographic (UPS), Technical Report TM 8358.2, DefenseMapping Agency, http://earth-info.nga.mil/GandG/publications/tm8358.2/TM83582.pdf.
C. F. F. Karney, 2010,GeographicLib, version 1.7, http://geographiclib.sf.net.
R. Konig and K. H. Weise, 1951,Mathematische Grundlagender Hoheren Geodasie und Kartographie, volume 1 (Springer,Berlin).
J. H. L. Kruger, 1912,Konforme Abbildung des Erdellipsoids in derEbene, New Series 52, Royal Prussian Geodetic Institute, Pots-dam, doi:10.2312/GFZ.b103-krueger28.
R. Kuittinen, T. Sarjakoski, M. Ollikainen, M. Poutanen, R.Nu-uros, P. Tatila, J. Peltola, R. Ruotsalainen, and M. Ollikainen,2006,ETRS89—jarjestelmaan liittyvat karttaprojektiot, tasokoor-dinaatistot ja karttalehtijako, Technical Report JHS 154, FinnishGeodetic Institute, Appendix 1, Projektiokaavart, http://docs.jhs-suositukset.fi/jhs-suositukset/JHS154/JHS154liite1.pdf.
J. L. Lagrange, 1770,Nouvelle methode pour resoudre les equationslitterales par le moyen des series, in Oeuvres, volume 3, pp. 5–73 (Gauthier-Villars, Paris, 1869), reprint of Mem. de l’Acad.Roy. des Sciences de Berlin24, 251–326, http://books.google.com/books?id=YywPAAAAIAAJ&pg=PA5.
J. H. Lambert, 1772,Anmerkungen und Zusatze zur Entwerfung derLand- und Himmelscharten, number 54 in Klassiker ex. Wiss.(Engelmann, Leipzig, 1894), translated into English by W. R. To-bler asNotes and Comments on the Composition of Terrestrial andCelestial Maps, Univ. of Michigan (1972), http://books.google.com/books?id=os MR3NUD4C.
L. P. Lee, 1976,Conformal projections based on Jacobian ellip-tic functions, Cartographica,13(1, Monograph 16), 67–101, doi:10.3138/X687-1574-4325-WM62.
K. Ludwig, 1943, Die der transversalen Mercatorkarte derKugel entsprechende Abbildung des Rotationsellipsoids, J. ReineAngew. Math.,185(4), 193–230, doi:10.1515/crll.1943.185.193,http://resolver.sub.uni-goettingen.de/purl?GDZPPN002175576.
Maxima, 2009,A computer algebra system, version 5.20.1, http://maxima.sf.net.
F. W. J. Olver, D. W. Lozier, R. F. Boisvert, and C. W. Clark, ed-itors, 2010,NIST Handbook of Mathematical Functions(Cam-bridge Univ. Press), http://dlmf.nist.gov.
N. Stuifbergen, 2009,Wide zone transverse Mercator projection,Technical Report 262, Canadian Hydrographic Service, http://www.dfo-mpo.gc.ca/Library/337182.pdf.
P. D. Thomas, 1952,Conformal projections in geodesy and car-tography, Special Publication 251, U.S. Coast and Geode-tic Survey, http://docs.lib.noaa.gov/rescue/cgsspecpubs/QB275U35no2511952.pdf.
D. E. Wallis, 1992,Transverse Mercator projection via elliptic inte-grals, Technical Report NPO-17996, JPL.
E. T. Whittaker and G. N. Watson, 1927,A Course of Modern Anal-ysis(Cambridge Univ. Press), 4th edition, reissued in CambridgeMath. Library Series (1996).