Simiosis Ydro Sigxr Syst Proosis 2008
228
Η ΓΕΩΜΕΤΡΙΑ ΤΗΣ ΕΛΙΚΑΣ Γ.Κ. Πολίτη, Αναπληρωτή Καθηγητή Φ.Α. Σκαμνέλη, Ναυπηγού Μηχ. Μηχ. ΕΜΠ ΠΕΡΙΕΧΟΜΕΝΑ: 1. Η ΓΕΩΜΕΤΡΙΑ ΤΗΣ ΕΛΙΚΑΣ - ΕΙΣΑΓΩΓΗ ........................................................................ 2 2. ΣΥΣΤΗΜΑΤΑ ΣΥΝΤΕΤΑΓΜΕΝΩΝ..................................................................................... 2 3. ΓΡΑΜΜΕΣ ΑΝΑΦΟΡΑΣ ΣΕ ΜΙΑ ΕΛΙΚΑ............................................................................ 2 4. ΒΗΜΑ (pitch) .......................................................................................................................... 4 5. ΠΛΕΥΡΙΚΗ ΚΑΙ ΔΙΑΜΗΚΗΣ ΑΠΟΚΛΙΣΗ ΠΤΕΡΥΓΙΟΥ ................................................. 8 6. ΠΕΡΙΓΡΑΜΜΑΤΑ ΕΛΙΚΑΣ ΚΑΙ ΑΝΤΙΣΤΟΙΧΕΣ ΕΠΙΦΑΝΕΙΕΣ .................................... 13 7. ΜΕΘΟΔΟΙ ΣΧΕΔΙΑΣΗΣ ΤΩΝ ΕΛΙΚΩΝ ............................................................................ 17 8. ΓΕΩΜΕΤΡΙΑ ΥΔΡΟΤΟΜΩΝ ............................................................................................... 20 9. ΚΑΤΑΝΟΜΗ ΠΑΧΟΥΣ ΠΤΕΡΥΓΙΟΥ ΚΑΙ ΛΟΓΟΣ ΠΑΧΟΥΣ (THICKNESS FRACTION) .................................................................................................................................. 27 10. ΟΡΙΑ ΥΠΕΡΚΑΛΥΨΗΣ ΠΤΕΡΥΓΙΩΝ ΓΙΑ ΕΛΙΚΕΣ ΡΥΘΜΙΖΟΜΕΝΟΥ ΒΗΜΑΤΟΣ . 28 11. ΟΡΟΛΟΓΙΑ ΣΧΕΤΙΚΗ ΜΕ ΤΙΣ ΣΥΜΒΑΤΙΚΕΣ ΕΛΙΚΕΣ ............................................. 29 12. Η ΠΛΗΜΝΗ ΤΗΣ ΕΛΙΚΑΣ ............................................................................................. 29 13. ΧΕΙΡΙΣΜΟΣ ΤΗΣ ΓΕΩΜΕΤΡΙΑΣ ΤΗΣ ΕΛΙΚΑΣ ΜΕ ΤΗ ΒΟΗΘΕΙΑ Η/Υ – ΕΝΑ ΑΠΛΟ ΠΑΡΑΔΕΙΓΜΑ ΣΕ FORTRAN 95 ................................................................................... 31 14. ΒΙΒΛΙΟΓΡΑΦΙΑ ............................................................................................................... 34 1
description
Σημειώσεις του μαθήματος υδροδυναμική σύγχρονων συστημάτων πρόωσης Ναυπηγών ΕΜΠ
Transcript of Simiosis Ydro Sigxr Syst Proosis 2008
Η ΓΕΩΜΕΤΡΙΑ ΤΗΣ ΕΛΙΚΑΣ Γ.Κ. Πολίτη, Αναπληρωτή Καθηγητή
Φ.Α. Σκαμνέλη, Ναυπηγού Μηχ. Μηχ. ΕΜΠ
ΠΕΡΙΕΧΟΜΕΝΑ:
1. Η ΓΕΩΜΕΤΡΙΑ ΤΗΣ ΕΛΙΚΑΣ - ΕΙΣΑΓΩΓΗ ........................................................................ 2 2. ΣΥΣΤΗΜΑΤΑ ΣΥΝΤΕΤΑΓΜΕΝΩΝ ..................................................................................... 2 3. ΓΡΑΜΜΕΣ ΑΝΑΦΟΡΑΣ ΣΕ ΜΙΑ ΕΛΙΚΑ............................................................................ 2 4. ΒΗΜΑ (pitch) .......................................................................................................................... 4 5. ΠΛΕΥΡΙΚΗ ΚΑΙ ΔΙΑΜΗΚΗΣ ΑΠΟΚΛΙΣΗ ΠΤΕΡΥΓΙΟΥ ................................................. 8 6. ΠΕΡΙΓΡΑΜΜΑΤΑ ΕΛΙΚΑΣ ΚΑΙ ΑΝΤΙΣΤΟΙΧΕΣ ΕΠΙΦΑΝΕΙΕΣ .................................... 13 7. ΜΕΘΟΔΟΙ ΣΧΕΔΙΑΣΗΣ ΤΩΝ ΕΛΙΚΩΝ ............................................................................ 17 8. ΓΕΩΜΕΤΡΙΑ ΥΔΡΟΤΟΜΩΝ ............................................................................................... 20 9. ΚΑΤΑΝΟΜΗ ΠΑΧΟΥΣ ΠΤΕΡΥΓΙΟΥ ΚΑΙ ΛΟΓΟΣ ΠΑΧΟΥΣ (THICKNESS FRACTION) .................................................................................................................................. 27 10. ΟΡΙΑ ΥΠΕΡΚΑΛΥΨΗΣ ΠΤΕΡΥΓΙΩΝ ΓΙΑ ΕΛΙΚΕΣ ΡΥΘΜΙΖΟΜΕΝΟΥ ΒΗΜΑΤΟΣ . 28 11. ΟΡΟΛΟΓΙΑ ΣΧΕΤΙΚΗ ΜΕ ΤΙΣ ΣΥΜΒΑΤΙΚΕΣ ΕΛΙΚΕΣ ............................................. 29 12. Η ΠΛΗΜΝΗ ΤΗΣ ΕΛΙΚΑΣ ............................................................................................. 29 13. ΧΕΙΡΙΣΜΟΣ ΤΗΣ ΓΕΩΜΕΤΡΙΑΣ ΤΗΣ ΕΛΙΚΑΣ ΜΕ ΤΗ ΒΟΗΘΕΙΑ Η/Υ – ΕΝΑ ΑΠΛΟ ΠΑΡΑΔΕΙΓΜΑ ΣΕ FORTRAN 95 ................................................................................... 31 14. ΒΙΒΛΙΟΓΡΑΦΙΑ ............................................................................................................... 34
1
1. Η ΓΕΩΜΕΤΡΙΑ ΤΗΣ ΕΛΙΚΑΣ - ΕΙΣΑΓΩΓΗ
Για να μπορέσει κάποιος να εκτιμήσει την υδροδυναμική συμπεριφορά μιας έλικας είτε από εμπειρική είτε από θεωρητική άποψη πρέπει πρώτα να κατανοήσει σε βάθος τη γεωμετρία της και τον τρόπο με τον οποίο ορίζονται τα σχετικά μεγέθη. Αν και κάθε κατασκευαστής, μελετητής ή δεξαμενή δοκιμών μπορεί να έχει το δικό του τρόπο παρουσίασης των γεωμετρικών δεδομένων στα σχέδια - τα οποία φτιάχνονται είτε με το χέρι είτε μέσω ηλεκτρονικού υπολογιστή -, οι διαφορές μεταξύ τους συνήθως έχουν να κάνουν περισσότερο με λεπτομέρειες παρά με θεμελιώδεις αλλαγές στους ορισμούς των μεγεθών. Συνεπώς αυτό το κεφάλαιο δεν περιλαμβάνει τους διάφορους τρόπους με τους οποίους μπορεί να παρουσιαστεί η γεωμετρία της έλικας αλλά μια γενική αναφορά σε αυτή προκειμένου να παρασχεθεί η βασική γνώση για οποιαδήποτε σχετικά προβλήματα απασχολήσουν τον αναγνώστη στο μέλλον.
2. ΣΥΣΤΗΜΑΤΑ ΣΥΝΤΕΤΑΓΜΕΝΩΝ
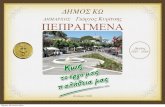
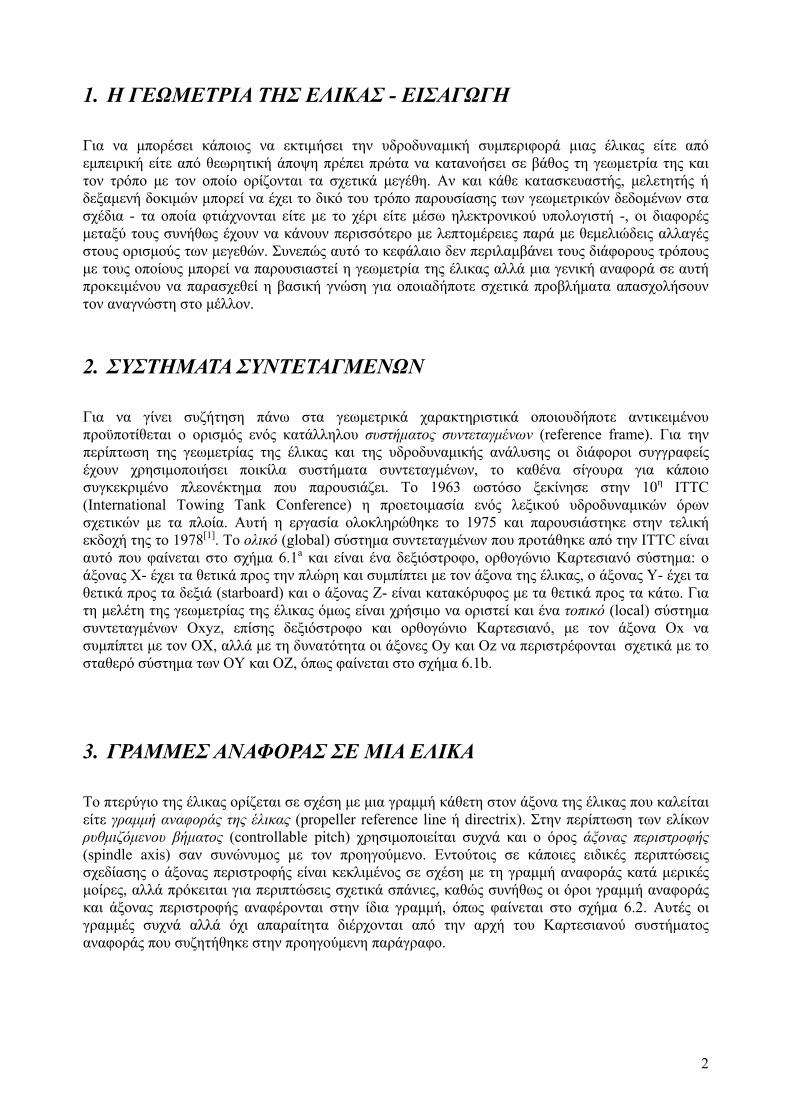
Για να γίνει συζήτηση πάνω στα γεωμετρικά χαρακτηριστικά οποιουδήποτε αντικειμένου προϋποτίθεται ο ορισμός ενός κατάλληλου συστήματος συντεταγμένων (reference frame). Για την περίπτωση της γεωμετρίας της έλικας και της υδροδυναμικής ανάλυσης οι διάφοροι συγγραφείς έχουν χρησιμοποιήσει ποικίλα συστήματα συντεταγμένων, το καθένα σίγουρα για κάποιο συγκεκριμένο πλεονέκτημα που παρουσιάζει. Το 1963 ωστόσο ξεκίνησε στην 10η ITTC (International Towing Tank Conference) η προετοιμασία ενός λεξικού υδροδυναμικών όρων σχετικών με τα πλοία. Αυτή η εργασία ολοκληρώθηκε το 1975 και παρουσιάστηκε στην τελική εκδοχή της το 1978[1]. Το ολικό (global) σύστημα συντεταγμένων που προτάθηκε από την ITTC είναι αυτό που φαίνεται στο σχήμα 6.1a και είναι ένα δεξιόστροφο, ορθογώνιο Καρτεσιανό σύστημα: ο άξονας Χ- έχει τα θετικά προς την πλώρη και συμπίπτει με τον άξονα της έλικας, ο άξονας Υ- έχει τα θετικά προς τα δεξιά (starboard) και ο άξονας Ζ- είναι κατακόρυφος με τα θετικά προς τα κάτω. Για τη μελέτη της γεωμετρίας της έλικας όμως είναι χρήσιμο να οριστεί και ένα τοπικό (local) σύστημα συντεταγμένων Oxyz, επίσης δεξιόστροφο και ορθογώνιο Καρτεσιανό, με τον άξονα Οx να συμπίπτει με τον OX, αλλά με τη δυνατότητα οι άξονες Οy και Οz να περιστρέφονται σχετικά με το σταθερό σύστημα των ΟΥ και ΟΖ, όπως φαίνεται στο σχήμα 6.1b.
3. ΓΡΑΜΜΕΣ ΑΝΑΦΟΡΑΣ ΣΕ ΜΙΑ ΕΛΙΚΑ
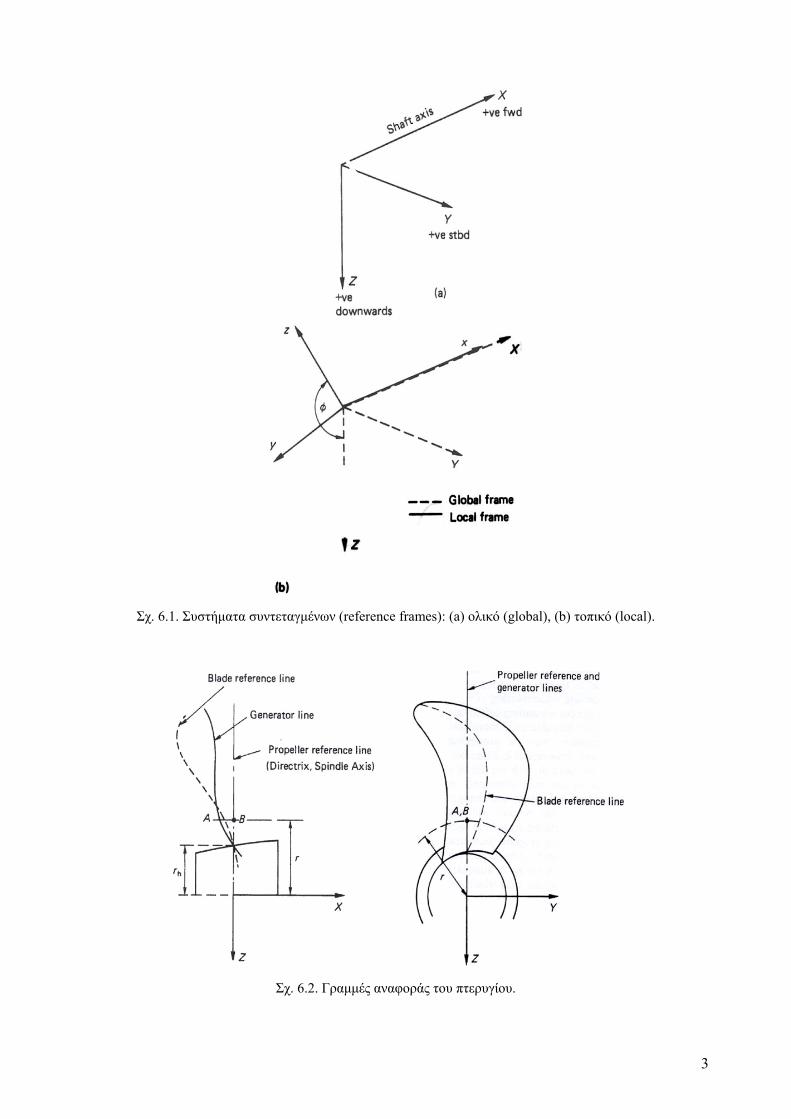
Το πτερύγιο της έλικας ορίζεται σε σχέση με μια γραμμή κάθετη στον άξονα της έλικας που καλείται είτε γραμμή αναφοράς της έλικας (propeller reference line ή directrix). Στην περίπτωση των ελίκων ρυθμιζόμενου βήματος (controllable pitch) χρησιμοποιείται συχνά και ο όρος άξονας περιστροφής (spindle axis) σαν συνώνυμος με τον προηγούμενο. Εντούτοις σε κάποιες ειδικές περιπτώσεις σχεδίασης ο άξονας περιστροφής είναι κεκλιμένος σε σχέση με τη γραμμή αναφοράς κατά μερικές μοίρες, αλλά πρόκειται για περιπτώσεις σχετικά σπάνιες, καθώς συνήθως οι όροι γραμμή αναφοράς και άξονας περιστροφής αναφέρονται στην ίδια γραμμή, όπως φαίνεται στο σχήμα 6.2. Αυτές οι γραμμές συχνά αλλά όχι απαραίτητα διέρχονται από την αρχή του Καρτεσιανού συστήματος αναφοράς που συζητήθηκε στην προηγούμενη παράγραφο.
2
Σχ. 6.1. Συστήματα συντεταγμένων (reference frames): (a) ολικό (global), (b) τοπικό (local).
Σχ. 6.2. Γραμμές αναφοράς του πτερυγίου.
3
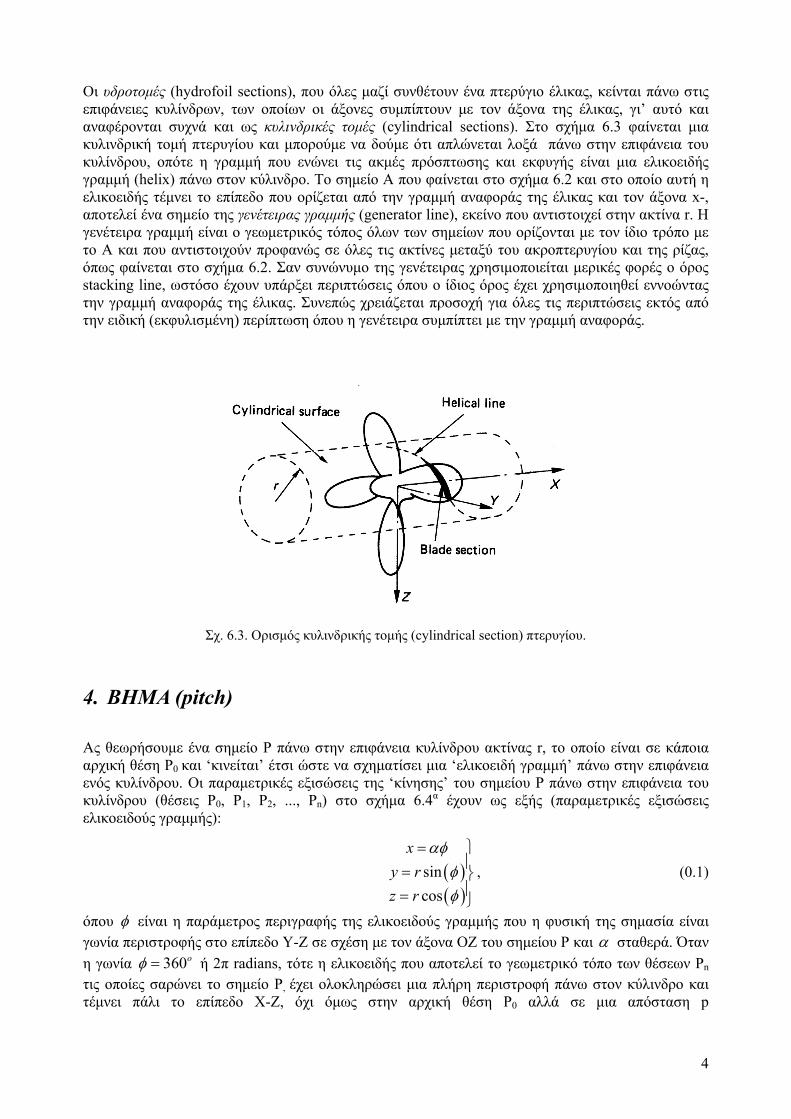
Οι υδροτομές (hydrofoil sections), που όλες μαζί συνθέτουν ένα πτερύγιο έλικας, κείνται πάνω στις επιφάνειες κυλίνδρων, των οποίων οι άξονες συμπίπτουν με τον άξονα της έλικας, γι’ αυτό και αναφέρονται συχνά και ως κυλινδρικές τομές (cylindrical sections). Στο σχήμα 6.3 φαίνεται μια κυλινδρική τομή πτερυγίου και μπορούμε να δούμε ότι απλώνεται λοξά πάνω στην επιφάνεια του κυλίνδρου, οπότε η γραμμή που ενώνει τις ακμές πρόσπτωσης και εκφυγής είναι μια ελικοειδής γραμμή (helix) πάνω στον κύλινδρο. Το σημείο Α που φαίνεται στο σχήμα 6.2 και στο οποίο αυτή η ελικοειδής τέμνει το επίπεδο που ορίζεται από την γραμμή αναφοράς της έλικας και τον άξονα x-, αποτελεί ένα σημείο της γενέτειρας γραμμής (generator line), εκείνο που αντιστοιχεί στην ακτίνα r. Η γενέτειρα γραμμή είναι ο γεωμετρικός τόπος όλων των σημείων που ορίζονται με τον ίδιο τρόπο με το Α και που αντιστοιχούν προφανώς σε όλες τις ακτίνες μεταξύ του ακροπτερυγίου και της ρίζας, όπως φαίνεται στο σχήμα 6.2. Σαν συνώνυμο της γενέτειρας χρησιμοποιείται μερικές φορές ο όρος stacking line, ωστόσο έχουν υπάρξει περιπτώσεις όπου ο ίδιος όρος έχει χρησιμοποιηθεί εννοώντας την γραμμή αναφοράς της έλικας. Συνεπώς χρειάζεται προσοχή για όλες τις περιπτώσεις εκτός από την ειδική (εκφυλισμένη) περίπτωση όπου η γενέτειρα συμπίπτει με την γραμμή αναφοράς.
Σχ. 6.3. Ορισμός κυλινδρικής τομής (cylindrical section) πτερυγίου.
4. ΒΗΜΑ (pitch)
Ας θεωρήσουμε ένα σημείο Ρ πάνω στην επιφάνεια κυλίνδρου ακτίνας r, το οποίο είναι σε κάποια αρχική θέση Ρ0 και ‘κινείται’ έτσι ώστε να σχηματίσει μια ‘ελικοειδή γραμμή’ πάνω στην επιφάνεια ενός κυλίνδρου. Οι παραμετρικές εξισώσεις της ‘κίνησης’ του σημείου Ρ πάνω στην επιφάνεια του κυλίνδρου (θέσεις Ρ0, Ρ1, Ρ2, ..., Ρn) στο σχήμα 6.4α έχουν ως εξής (παραμετρικές εξισώσεις ελικοειδούς γραμμής):
( )( )
sincos
xy rz r
αφφφ
= ⎫⎪= ⎬⎪= ⎭
, (0.1)
όπου φ είναι η παράμετρος περιγραφής της ελικοειδούς γραμμής που η φυσική της σημασία είναι γωνία περιστροφής στο επίπεδο Υ-Ζ σε σχέση με τον άξονα ΟΖ του σημείου P και α σταθερά. Όταν η γωνία ή 2π radians, τότε η ελικοειδής που αποτελεί το γεωμετρικό τόπο των θέσεων Ρn τις οποίες σαρώνει το σημείο Ρ, έχει ολοκληρώσει μια πλήρη περιστροφή πάνω στον κύλινδρο και τέμνει πάλι το επίπεδο Χ-Ζ, όχι όμως στην αρχική θέση Ρ0 αλλά σε μια απόσταση p
360oφ =
4
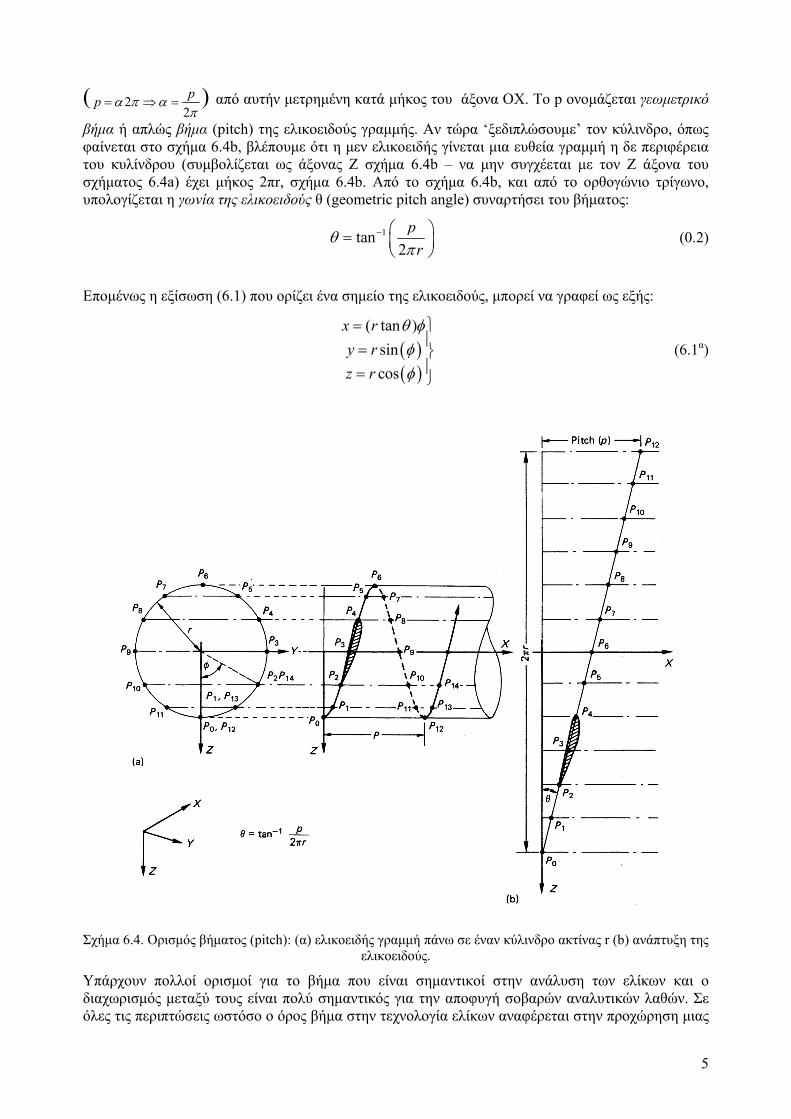
( 22pp α π απ
= ⇒ = ) από αυτήν μετρημένη κατά μήκος του άξονα ΟΧ. To p ονομάζεται γεωμετρικό
βήμα ή απλώς βήμα (pitch) της ελικοειδούς γραμμής. Αν τώρα ‘ξεδιπλώσουμε’ τον κύλινδρο, όπως φαίνεται στο σχήμα 6.4b, βλέπουμε ότι η μεν ελικοειδής γίνεται μια ευθεία γραμμή η δε περιφέρεια του κυλίνδρου (συμβολίζεται ως άξονας Z σχήμα 6.4b – να μην συγχέεται με τον Z άξονα του σχήματος 6.4a) έχει μήκος 2πr, σχήμα 6.4b. Από το σχήμα 6.4b, και από το ορθογώνιο τρίγωνο, υπολογίζεται η γωνία της ελικοειδούς θ (geometric pitch angle) συναρτήσει του βήματος:
1tan2
pr
θπ
− ⎛= ⎜⎝ ⎠
⎞⎟ (0.2)
Επομένως η εξίσωση (6.1) που ορίζει ένα σημείο της ελικοειδούς, μπορεί να γραφεί ως εξής:
( )( )
( tan )sincos
x ry rz r
θ φφφ
= ⎫⎪= ⎬⎪= ⎭
(6.1α)
Σχήμα 6.4. Ορισμός βήματος (pitch): (α) ελικοειδής γραμμή πάνω σε έναν κύλινδρο ακτίνας r (b) ανάπτυξη της
ελικοειδούς.
Υπάρχουν πολλοί ορισμοί για το βήμα που είναι σημαντικοί στην ανάλυση των ελίκων και ο διαχωρισμός μεταξύ τους είναι πολύ σημαντικός για την αποφυγή σοβαρών αναλυτικών λαθών. Σε όλες τις περιπτώσεις ωστόσο ο όρος βήμα στην τεχνολογία ελίκων αναφέρεται στην προχώρηση μιας
5
ελικοειδούς γραμμής κατά μήκος μιας κυλινδρικής επιφάνειας, ενώ για παράδειγμα στον σχεδιασμό γραναζιών το βήμα αναφέρεται στην απόσταση μεταξύ των δοντιών. Οι βασικοί όροι που σχετίζονται με το βήμα και με τους οποίους ο μελετητής πρέπει να είναι απόλυτα εξοικειωμένος είναι:
1. Βήμα χείλους πρόσπτωσης – χείλους εκφυγής (nose-tail pitch)
2. Βήμα πρόσοψης (face pitch)
3. Βήμα μηδενικής άνωσης (effective or ‘no-lift’ pitch)
4. Υδροδυναμικό βήμα (hydrodynamic pitch)
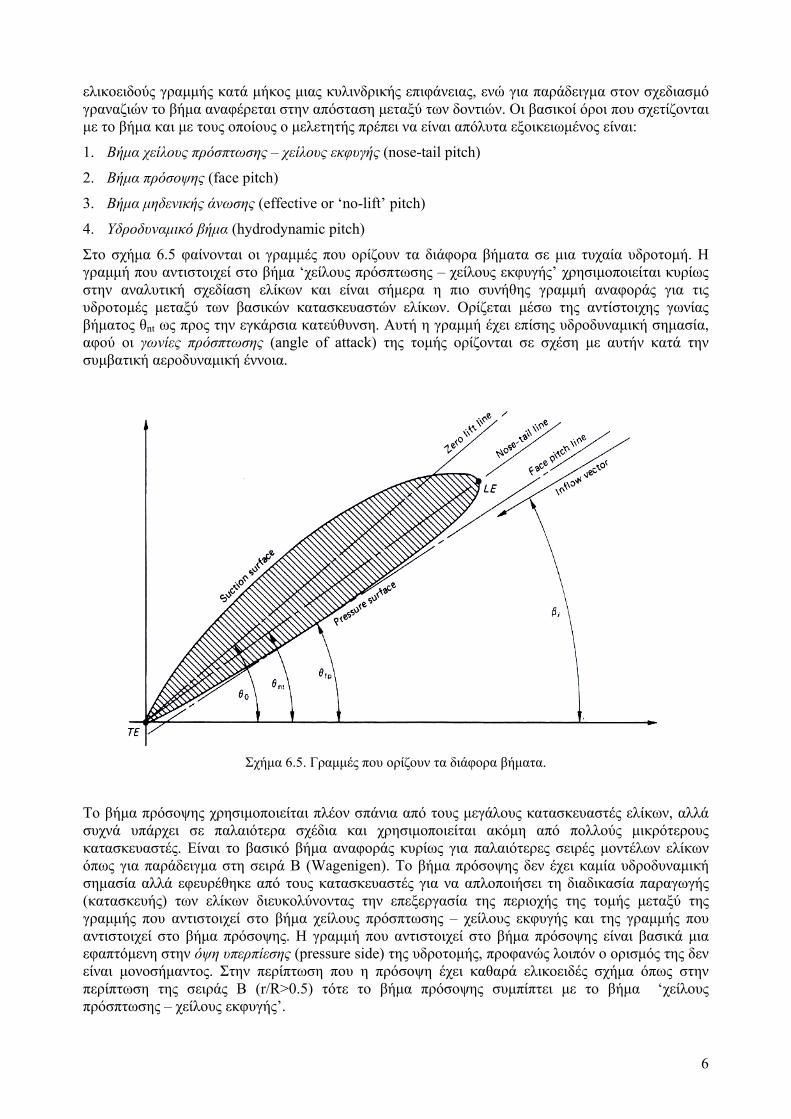
Στο σχήμα 6.5 φαίνονται οι γραμμές που ορίζουν τα διάφορα βήματα σε μια τυχαία υδροτομή. Η γραμμή που αντιστοιχεί στο βήμα ‘χείλους πρόσπτωσης – χείλους εκφυγής’ χρησιμοποιείται κυρίως στην αναλυτική σχεδίαση ελίκων και είναι σήμερα η πιο συνήθης γραμμή αναφοράς για τις υδροτομές μεταξύ των βασικών κατασκευαστών ελίκων. Ορίζεται μέσω της αντίστοιχης γωνίας βήματος θnt ως προς την εγκάρσια κατεύθυνση. Αυτή η γραμμή έχει επίσης υδροδυναμική σημασία, αφού οι γωνίες πρόσπτωσης (angle of attack) της τομής ορίζονται σε σχέση με αυτήν κατά την συμβατική αεροδυναμική έννοια.
Σχήμα 6.5. Γραμμές που ορίζουν τα διάφορα βήματα.
Το βήμα πρόσοψης χρησιμοποιείται πλέον σπάνια από τους μεγάλους κατασκευαστές ελίκων, αλλά συχνά υπάρχει σε παλαιότερα σχέδια και χρησιμοποιείται ακόμη από πολλούς μικρότερους κατασκευαστές. Είναι το βασικό βήμα αναφοράς κυρίως για παλαιότερες σειρές μοντέλων ελίκων όπως για παράδειγμα στη σειρά Β (Wagenigen). Το βήμα πρόσοψης δεν έχει καμία υδροδυναμική σημασία αλλά εφευρέθηκε από τους κατασκευαστές για να απλοποιήσει τη διαδικασία παραγωγής (κατασκευής) των ελίκων διευκολύνοντας την επεξεργασία της περιοχής της τομής μεταξύ της γραμμής που αντιστοιχεί στο βήμα χείλους πρόσπτωσης – χείλους εκφυγής και της γραμμής που αντιστοιχεί στο βήμα πρόσοψης. Η γραμμή που αντιστοιχεί στο βήμα πρόσοψης είναι βασικά μια εφαπτόμενη στην όψη υπερπίεσης (pressure side) της υδροτομής, προφανώς λοιπόν ο ορισμός της δεν είναι μονοσήμαντος. Στην περίπτωση που η πρόσοψη έχει καθαρά ελικοειδές σχήμα όπως στην περίπτωση της σειράς Β (r/R>0.5) τότε το βήμα πρόσοψης συμπίπτει με το βήμα ‘χείλους πρόσπτωσης – χείλους εκφυγής’.
6

Η γραμμή που αντιστοιχεί στο βήμα μηδενικής άνωσης είναι ακριβώς αυτή που ορίζεται κατά την συμβατική αεροδυναμική έννοια ως η γραμμή που αν συμπέσει με τη διεύθυνση της ροής, το αποτέλεσμα θα είναι η υδροτομή να αναπτύσσει μηδενική άνωση. Η αντίστοιχη γωνία (θ0) σε σχέση με την εγκάρσια διεύθυνση είναι μεγαλύτερη από τη θnt κατά μία γωνία που αποτελεί την τρισδιάστατη γωνία μηδενικής άνωσης της τομής ( 0 ntθ θ≡ − ). Η θ0 είναι λοιπόν θεμελιώδους σημασίας, καθώς είναι η βάση με την οποία υπολογίζονται οι υδροδυναμικές δυνάμεις της τομής που σχετίζονται με την υδροτομή.
Τέλος, η γωνία υδροδυναμικού βήματος (βi) είναι η γωνία με την οποία εισέρχεται η ροή σε σχέση με την εγκάρσια διεύθυνση, άρα δεν πρόκειται για μια γεωμετρική ιδιότητα της έλικας. Να σημειωθεί ότι ούτε αυτή η γωνία ούτε η γωνία του βήματος μηδενικής άνωσης εμφανίζονται στο κατασκευαστικό σχέδιο έλικας. Η άνωση που θα αναπτύξει η υδροτομή είναι ανάλογη της γωνίας
0 iθ β− .
Για τη σύγκριση ελίκων με μεταβαλλόμενη την τιμή του βήματος κατά μήκος της ακτίνας έχει επικρατήσει να χρησιμοποιείται η ακόλουθη σχέση ορισμού ενός «μέσου βήματος» (mean pitch):
1
1h
h
x x
x x
pxdxp
xdx
=
=
=∫
∫, (0.3)
όπου x=r/R είναι η αδιάστατη ακτίνα. Η σχέση (6.3) προκύπτει από την σχέση υπολογισμού της μέσης ροπής ενός πτερυγίου έλικας αλλά με αντικατάσταση της δύναμης κάθε στοιχειώδους πτερυγοτομής από το βήμα της. Ο λόγος για την χρήση της σχέσης (6.3) είναι ότι πρόκειται για έναν ορισμό που η επιτυχία του έχει επιβεβαιωθεί πρακτικά. Συνεπώς η σχέση (6.3) μπορεί να χρησιμοποιηθεί για να οριστεί ένα «μέσο γεωμετρικό βήμα» και ένα «μέσο βήμα μηδενικής άνωσης». Η διαφορά των δύο αυτών βημάτων μας δίνει ένα μέτρο σύγκρισης, από την άποψη της απορρόφησης ισχύος, έλικων οι οποίες μπορεί να έχουν διαφορετικές ακτινικές κατανομές βήματος. Για συνεχείς και ομαλές κατανομές βήματος από την ρίζα ως το ακροπτερύγιο προκύπτει συχνά ότι το μέσο βήμα που υπολογίζεται με αυτόν τον τρόπο αντιστοιχεί σε μέγεθος με το τοπικό βήμα στην περιοχή γύρω από το 0.7R το οποίο για αυτό το λόγο ονομάζεται και ‘ισοδύναμη ακτίνα’ του πτερυγίου (equivalent radius) .
Για πρακτικούς λόγους υπολογισμού της (6.3), επειδή η ακτινική κατανομή βήματος αντιπροσωπεύεται συνήθως από μια ομαλή καμπύλη χωρίς μεγάλες αλλαγές κλίσης (σχήμα.6.6), είναι δυνατό να χρησιμοποιήσουμε μια χαμηλής τάξης διαδικασία αριθμητικής ολοκλήρωσης. Ο κανόνας του τραπεζίου αποτελεί μια τέτοια διαδικασία, όπου το άνοιγμα (span) του πτερυγίου μπορεί να χωριστεί σε δέκα για παράδειγμα διαστήματα, δίνοντας έτσι έντεκα συντεταγμένες, και τότε τα μέσα xj (j=1,2,3…,10) των διαστημάτων που δημιουργούνται ορίζονται ως ακολούθως:
1 ,2
i ij
x xx ++=
όπου i,j=1,2,3,..,10, x είναι η αδιάστατη ακτίνα x=r/R, xi=1=1 και xi=11 είναι η ακτίνα της ρίζας του πτερυγίου (blade root section).
Επειδή: ( ) ( )1 10
1 10h
tip hubj j
jx x
x xp x xdx p x x
==
−⎛ ⎞= ⎜ ⎟
⎝ ⎠∑∫ και
1 10
1 10h
tip hubj
jx x
x xxdx x
==
−⎛ ⎞= ⎜
⎝ ⎠∑∫ ⎟ , συνεπάγεται:
( )
10
110
1
j jj
jj
p x xp
x
=
=
=∑
∑ (0.4)
7
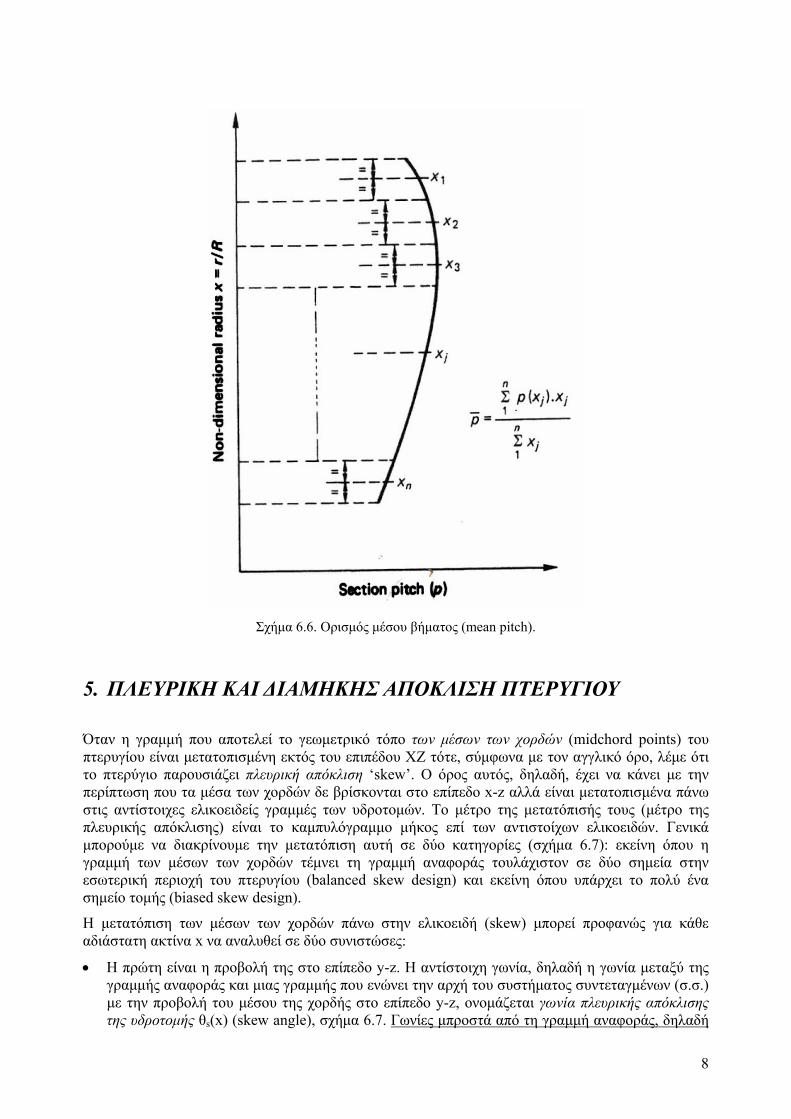
Σχήμα 6.6. Ορισμός μέσου βήματος (mean pitch).
5. ΠΛΕΥΡΙΚΗ ΚΑΙ ΔΙΑΜΗΚΗΣ ΑΠΟΚΛΙΣΗ ΠΤΕΡΥΓΙΟΥ
Όταν η γραμμή που αποτελεί το γεωμετρικό τόπο των μέσων των χορδών (midchord points) του πτερυγίου είναι μετατοπισμένη εκτός του επιπέδου ΧΖ τότε, σύμφωνα με τον αγγλικό όρο, λέμε ότι το πτερύγιο παρουσιάζει πλευρική απόκλιση ‘skew’. Ο όρος αυτός, δηλαδή, έχει να κάνει με την περίπτωση που τα μέσα των χορδών δε βρίσκονται στο επίπεδο x-z αλλά είναι μετατοπισμένα πάνω στις αντίστοιχες ελικοειδείς γραμμές των υδροτομών. Το μέτρο της μετατόπισής τους (μέτρο της πλευρικής απόκλισης) είναι το καμπυλόγραμμο μήκος επί των αντιστοίχων ελικοειδών. Γενικά μπορούμε να διακρίνουμε την μετατόπιση αυτή σε δύο κατηγορίες (σχήμα 6.7): εκείνη όπου η γραμμή των μέσων των χορδών τέμνει τη γραμμή αναφοράς τουλάχιστον σε δύο σημεία στην εσωτερική περιοχή του πτερυγίου (balanced skew design) και εκείνη όπου υπάρχει το πολύ ένα σημείο τομής (biased skew design).
Η μετατόπιση των μέσων των χορδών πάνω στην ελικοειδή (skew) μπορεί προφανώς για κάθε αδιάστατη ακτίνα x να αναλυθεί σε δύο συνιστώσες:
• Η πρώτη είναι η προβολή της στο επίπεδο y-z. Η αντίστοιχη γωνία, δηλαδή η γωνία μεταξύ της γραμμής αναφοράς και μιας γραμμής που ενώνει την αρχή του συστήματος συντεταγμένων (σ.σ.) με την προβολή του μέσου της χορδής στο επίπεδο y-z, ονομάζεται γωνία πλευρικής απόκλισης της υδροτομής θs(x) (skew angle), σχήμα 6.7. Γωνίες μπροστά από τη γραμμή αναφοράς, δηλαδή
8
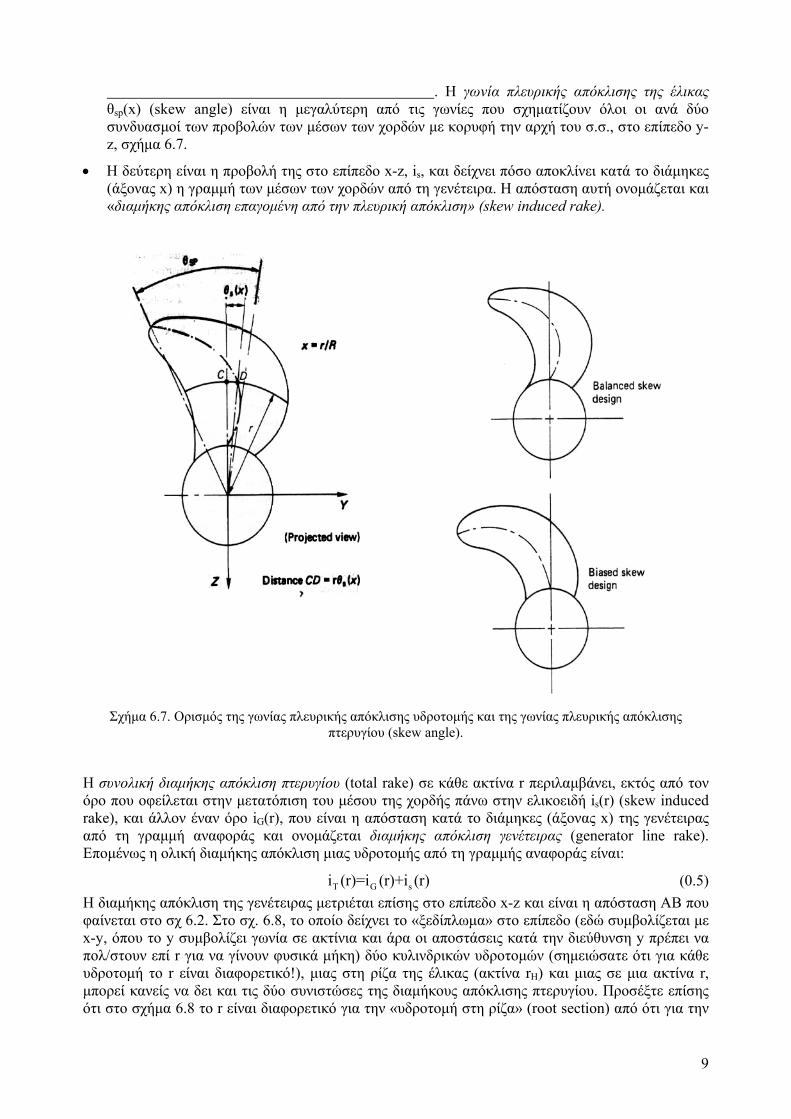
. Η γωνία πλευρικής απόκλισης της έλικας θsp(x) (skew angle) είναι η μεγαλύτερη από τις γωνίες που σχηματίζουν όλοι οι ανά δύο συνδυασμοί των προβολών των μέσων των χορδών με κορυφή την αρχή του σ.σ., στο επίπεδο y-z, σχήμα 6.7.
• Η δεύτερη είναι η προβολή της στο επίπεδο x-z, is, και δείχνει πόσο αποκλίνει κατά το διάμηκες (άξονας x) η γραμμή των μέσων των χορδών από τη γενέτειρα. Η απόσταση αυτή ονομάζεται και «διαμήκης απόκλιση επαγομένη από την πλευρική απόκλιση» (skew induced rake).
Σχήμα 6.7. Ορισμός της γωνίας πλευρικής απόκλισης υδροτομής και της γωνίας πλευρικής απόκλισης
πτερυγίου (skew angle).
Η συνολική διαμήκης απόκλιση πτερυγίου (total rake) σε κάθε ακτίνα r περιλαμβάνει, εκτός από τον όρο που οφείλεται στην μετατόπιση του μέσου της χορδής πάνω στην ελικοειδή is(r) (skew induced rake), και άλλον έναν όρο iG(r), που είναι η απόσταση κατά το διάμηκες (άξονας x) της γενέτειρας από τη γραμμή αναφοράς και ονομάζεται διαμήκης απόκλιση γενέτειρας (generator line rake). Επομένως η ολική διαμήκης απόκλιση μιας υδροτομής από τη γραμμής αναφοράς είναι:
(0.5) T G si (r)=i (r)+i (r) Η διαμήκης απόκλιση της γενέτειρας μετριέται επίσης στο επίπεδο x-z και είναι η απόσταση ΑΒ που φαίνεται στο σχ 6.2. Στο σχ. 6.8, το οποίο δείχνει το «ξεδίπλωμα» στο επίπεδο (εδώ συμβολίζεται με x-y, όπου το y συμβολίζει γωνία σε ακτίνια και άρα οι αποστάσεις κατά την διεύθυνση y πρέπει να πολ/στουν επί r για να γίνουν φυσικά μήκη) δύο κυλινδρικών υδροτομών (σημειώσατε ότι για κάθε υδροτομή το r είναι διαφορετικό!), μιας στη ρίζα της έλικας (ακτίνα rH) και μιας σε μια ακτίνα r, μπορεί κανείς να δει και τις δύο συνιστώσες της διαμήκους απόκλισης πτερυγίου. Προσέξτε επίσης ότι στο σχήμα 6.8 το r είναι διαφορετικό για την «υδροτομή στη ρίζα» (root section) από ότι για την
9
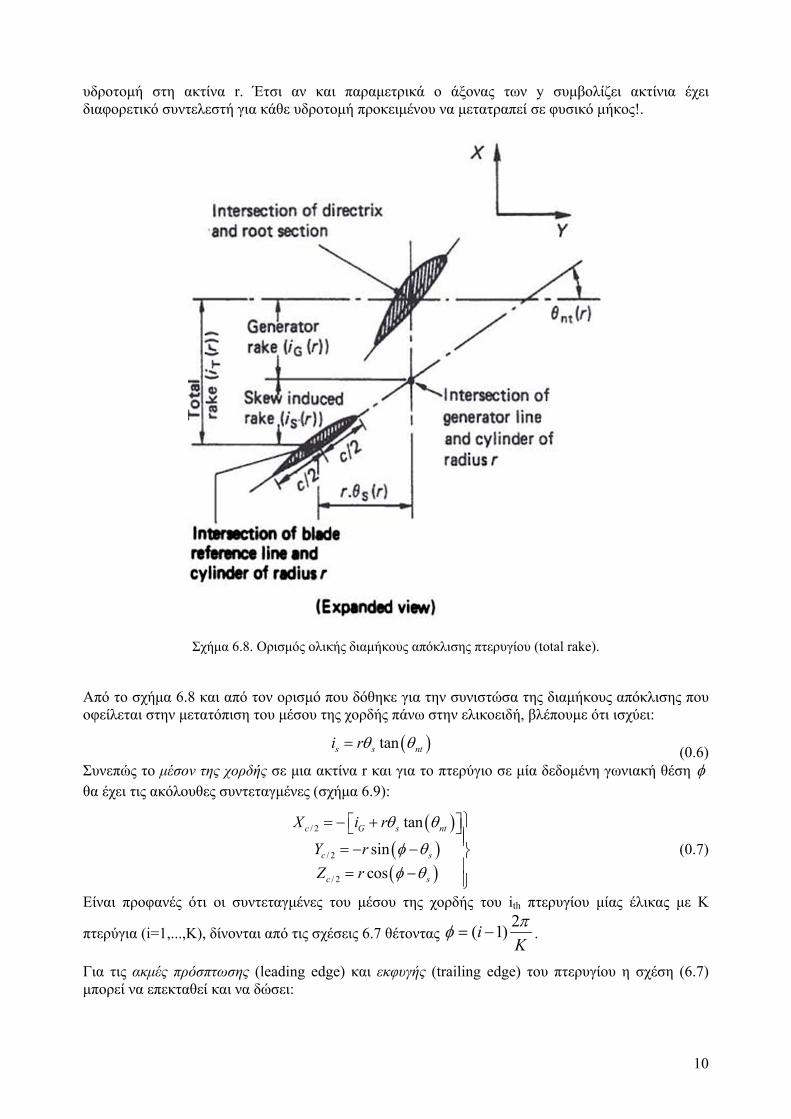
υδροτομή στη ακτίνα r. Έτσι αν και παραμετρικά ο άξονας των y συμβολίζει ακτίνια έχει διαφορετικό συντελεστή για κάθε υδροτομή προκειμένου να μετατραπεί σε φυσικό μήκος!.
Σχήμα 6.8. Ορισμός ολικής διαμήκους απόκλισης πτερυγίου (total rake).
Από το σχήμα 6.8 και από τον ορισμό που δόθηκε για την συνιστώσα της διαμήκους απόκλισης που οφείλεται στην μετατόπιση του μέσου της χορδής πάνω στην ελικοειδή, βλέπουμε ότι ισχύει:
( )tans si r ntθ θ= (0.6) Συνεπώς το μέσον της χορδής σε μια ακτίνα r και για το πτερύγιο σε μία δεδομένη γωνιακή θέση φ θα έχει τις ακόλουθες συντεταγμένες (σχήμα 6.9):
( )( )( )
/ 2
/ 2
/ 2
tan
sincos
c G s nt
c
c s
X i r
Y rZ r
θ θ
φ θφ θ
⎫= − +
s
⎡ ⎤⎣ ⎦⎪⎪= − − ⎬⎪= − ⎪⎭
(0.7)
Είναι προφανές ότι οι συντεταγμένες του μέσου της χορδής του ith πτερυγίου μίας έλικας με Κ
πτερύγια (i=1,...,Κ), δίνονται από τις σχέσεις 6.7 θέτοντας 2( 1)iKπφ = − .
Για τις ακμές πρόσπτωσης (leading edge) και εκφυγής (trailing edge) του πτερυγίου η σχέση (6.7) μπορεί να επεκταθεί και να δώσει:
10
( ) ( )
( )
( )
( ) ( )
( )
( )
tan sin2
cossin
2
coscos
2
tan sin2
cossin
2
coscos
2
le G s nt nt
ntle s
ntle s
te G s nt nt
ntte s
ntte s
cX i r
cY r
r
cZ r
r
cX i r
cY r
r
cZ r
r
θ θ θ
θφ θ
θφ θ
θ θ θ
θφ θ
θφ θ
⎫⎪= − + +⎡ ⎤⎣ ⎦ ⎪⎪⎛ ⎞ ⎪= − − + ⎬⎜ ⎟
⎝ ⎠ ⎪⎪⎛ ⎞ ⎪= − +⎜ ⎟ ⎪⎝ ⎠ ⎭⎫⎪= − + −⎡ ⎤⎣ ⎦ ⎪⎪⎛ ⎞ ⎪= − − − ⎬⎜ ⎟
⎝ ⎠ ⎪⎪⎛ ⎞ ⎪= − −⎜ ⎟ ⎪⎝ ⎠ ⎭
, (0.8)
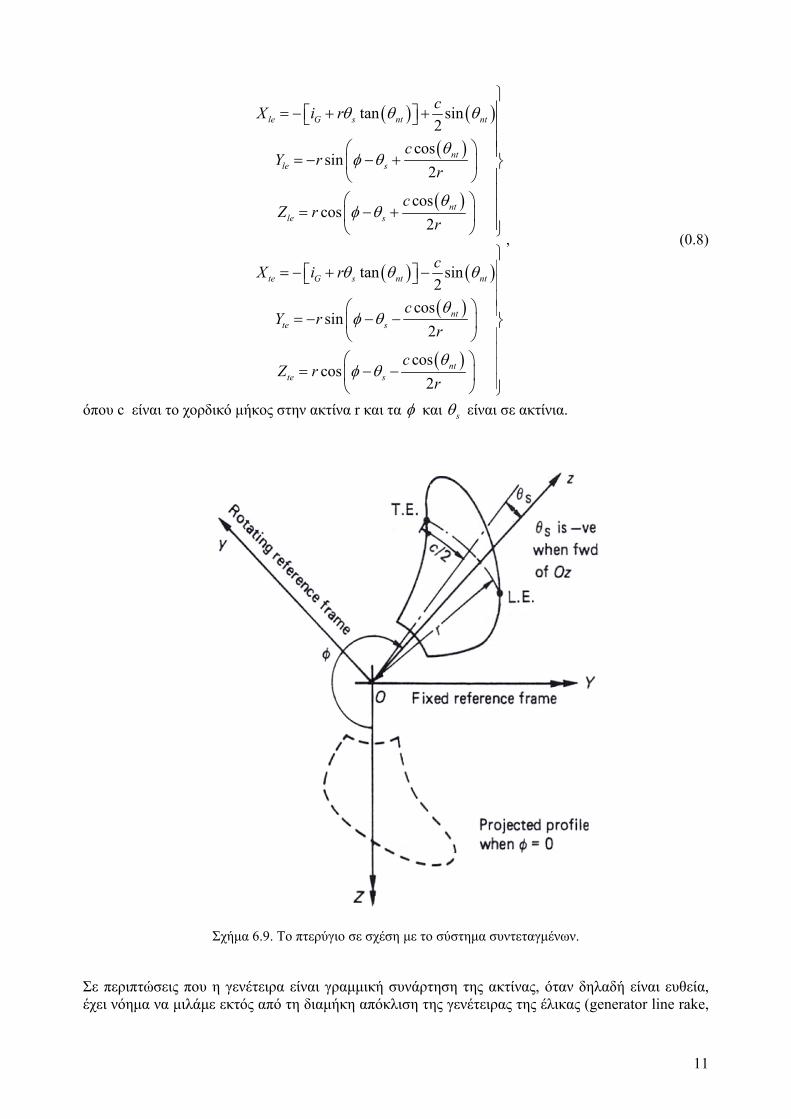
όπου c είναι το χορδικό μήκος στην ακτίνα r και τα φ και θs είναι σε ακτίνια.
Σχήμα 6.9. Το πτερύγιο σε σχέση με το σύστημα συντεταγμένων.
Σε περιπτώσεις που η γενέτειρα είναι γραμμική συνάρτηση της ακτίνας, όταν δηλαδή είναι ευθεία, έχει νόημα να μιλάμε εκτός από τη διαμήκη απόκλιση της γενέτειρας της έλικας (generator line rake,
11
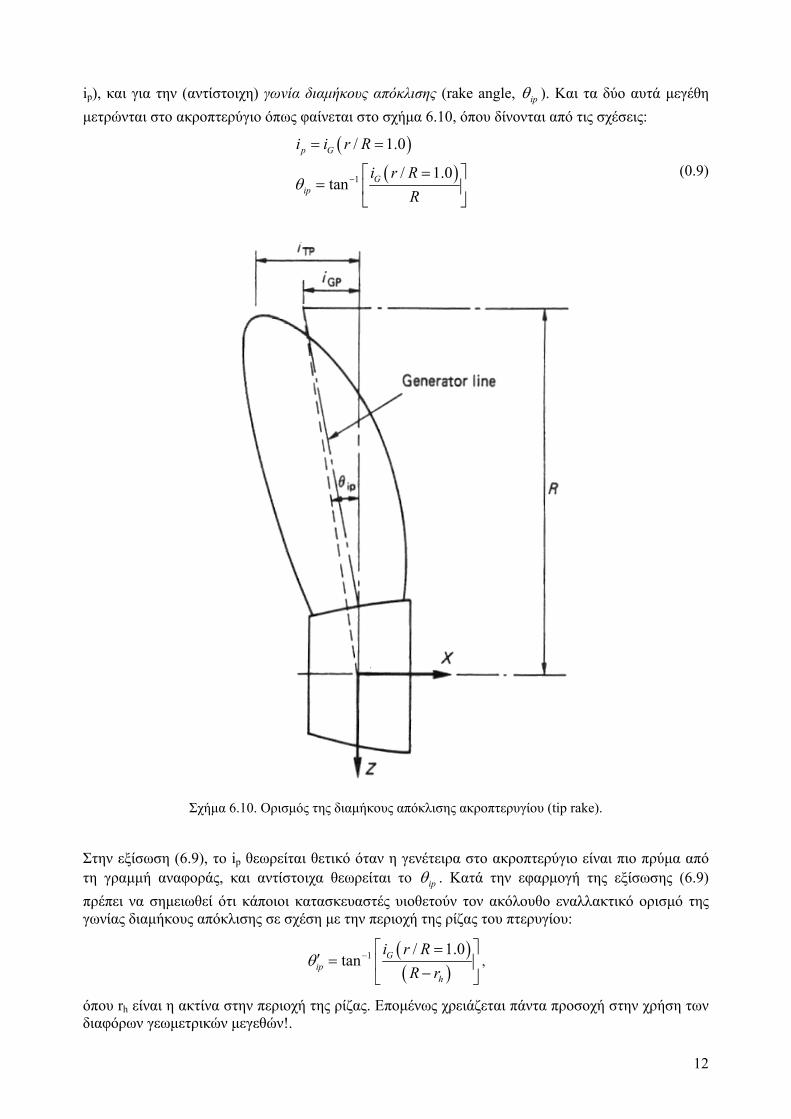
ip), και για την (αντίστοιχη) γωνία διαμήκους απόκλισης (rake angle, ipθ ). Και τα δύο αυτά μεγέθη μετρώνται στο ακροπτερύγιο όπως φαίνεται στο σχήμα 6.10, όπου δίνονται από τις σχέσεις:
( )( )1
/ 1.0
/ 1.0tan
p G
Gip
i i r R
i r RR
θ −
= =
=⎡ ⎤= ⎢ ⎥
⎣ ⎦
(0.9)
Σχήμα 6.10. Ορισμός της διαμήκους απόκλισης ακροπτερυγίου (tip rake).
Στην εξίσωση (6.9), το ip θεωρείται θετικό όταν η γενέτειρα στο ακροπτερύγιο είναι πιο πρύμα από τη γραμμή αναφοράς, και αντίστοιχα θεωρείται το ipθ . Κατά την εφαρμογή της εξίσωσης (6.9) πρέπει να σημειωθεί ότι κάποιοι κατασκευαστές υιοθετούν τον ακόλουθο εναλλακτικό ορισμό της γωνίας διαμήκους απόκλισης σε σχέση με την περιοχή της ρίζας του πτερυγίου:
( )( )
1 / 1.0tan G
iph
i r RR r
θ − ⎡ ⎤=′ = ⎢ ⎥−⎣ ⎦
,
όπου rh είναι η ακτίνα στην περιοχή της ρίζας. Επομένως χρειάζεται πάντα προσοχή στην χρήση των διαφόρων γεωμετρικών μεγεθών!.
12
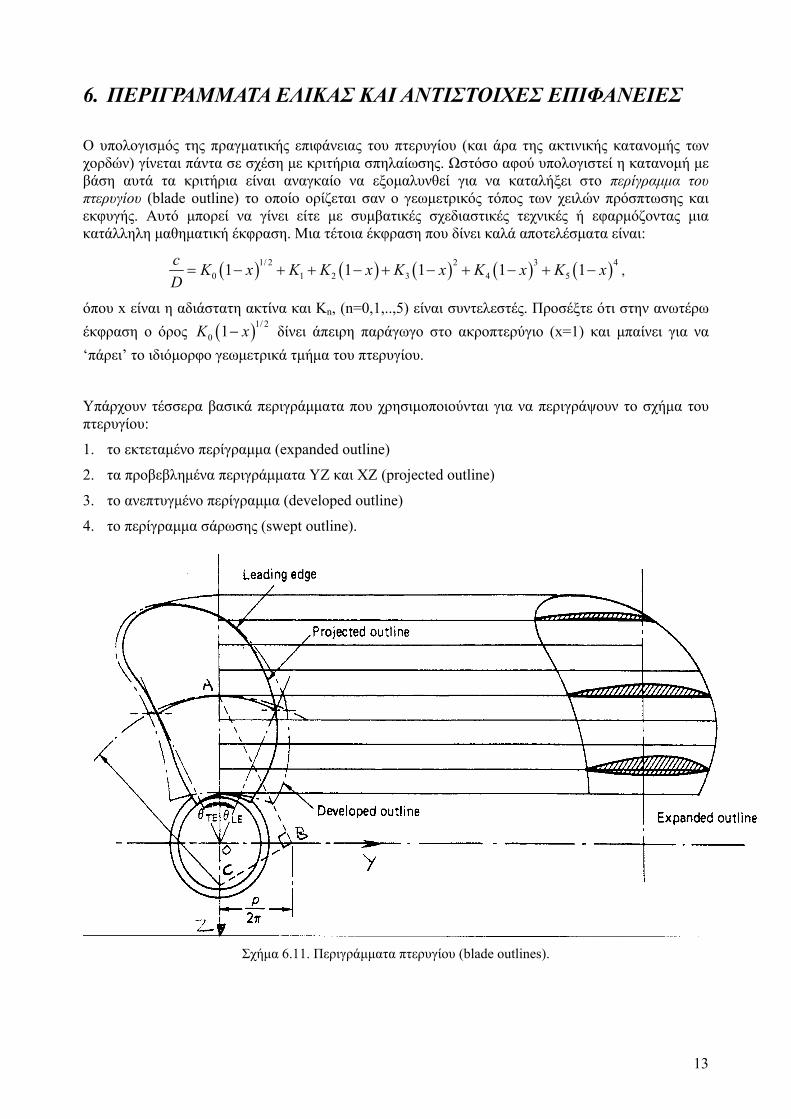
6. ΠΕΡΙΓΡΑΜΜΑΤΑ ΕΛΙΚΑΣ ΚΑΙ ΑΝΤΙΣΤΟΙΧΕΣ ΕΠΙΦΑΝΕΙΕΣ
Ο υπολογισμός της πραγματικής επιφάνειας του πτερυγίου (και άρα της ακτινικής κατανομής των χορδών) γίνεται πάντα σε σχέση με κριτήρια σπηλαίωσης. Ωστόσο αφού υπολογιστεί η κατανομή με βάση αυτά τα κριτήρια είναι αναγκαίο να εξομαλυνθεί για να καταλήξει στο περίγραμμα του πτερυγίου (blade outline) το οποίο ορίζεται σαν ο γεωμετρικός τόπος των χειλών πρόσπτωσης και εκφυγής. Αυτό μπορεί να γίνει είτε με συμβατικές σχεδιαστικές τεχνικές ή εφαρμόζοντας μια κατάλληλη μαθηματική έκφραση. Μια τέτοια έκφραση που δίνει καλά αποτελέσματα είναι:
( ) ( ) ( ) ( ) ( )1/ 2 2 3 40 1 2 3 4 51 1 1 1c K x K K x K x K x K x
D= − + + − + − + − + −1 ,
όπου x είναι η αδιάστατη ακτίνα και Kn, (n=0,1,..,5) είναι συντελεστές. Προσέξτε ότι στην ανωτέρω έκφραση ο όρος δίνει άπειρη παράγωγο στο ακροπτερύγιο (x=1) και μπαίνει για να ‘πάρει’ το ιδιόμορφο γεωμετρικά τμήμα του πτερυγίου.
( )1/ 20 1K x−
Υπάρχουν τέσσερα βασικά περιγράμματα που χρησιμοποιούνται για να περιγράψουν το σχήμα του πτερυγίου:
1. το εκτεταμένο περίγραμμα (expanded outline)
2. τα προβεβλημένα περιγράμματα ΥΖ και ΧΖ (projected outline)
3. το ανεπτυγμένο περίγραμμα (developed outline)
4. το περίγραμμα σάρωσης (swept outline).
Σχήμα 6.11. Περιγράμματα πτερυγίου (blade outlines).
13
Το εκτεταμένο περίγραμμα προκύπτει από το ‘ξεδίπλωμα’ των χορδών στο επίπεδο, στις σωστές ακτινικές τους θέσεις και στη σωστή τους θέση σε σχέση με τη γραμμή αναφοράς. Γύρω από τα χορδικά μήκη σχεδιάζονται συνήθως οι υδροτομές, όπως φαίνεται στο σχήμα 6.11 (αριστερά).
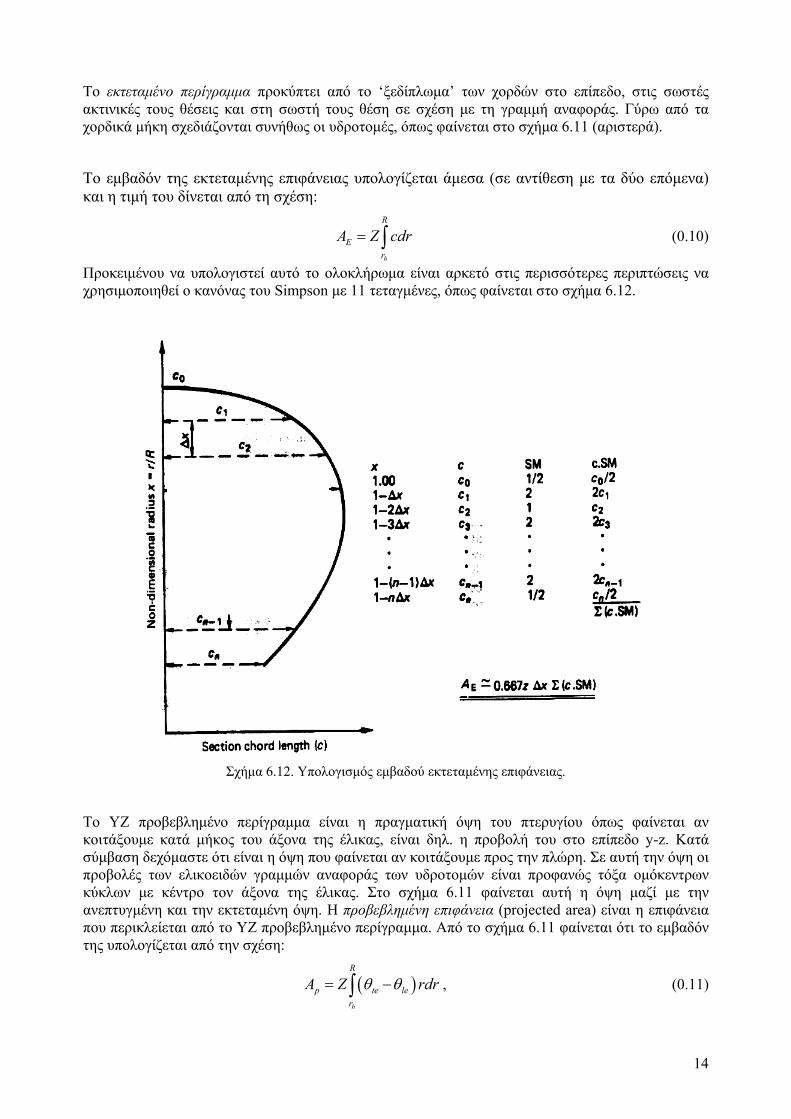
Το εμβαδόν της εκτεταμένης επιφάνειας υπολογίζεται άμεσα (σε αντίθεση με τα δύο επόμενα) και η τιμή του δίνεται από τη σχέση:
h
R
Er
A Z cd= r∫ (0.10)
Προκειμένου να υπολογιστεί αυτό το ολοκλήρωμα είναι αρκετό στις περισσότερες περιπτώσεις να χρησιμοποιηθεί ο κανόνας του Simpson με 11 τεταγμένες, όπως φαίνεται στο σχήμα 6.12.
Σχήμα 6.12. Υπολογισμός εμβαδού εκτεταμένης επιφάνειας.
Το ΥΖ προβεβλημένο περίγραμμα είναι η πραγματική όψη του πτερυγίου όπως φαίνεται αν κοιτάξουμε κατά μήκος του άξονα της έλικας, είναι δηλ. η προβολή του στο επίπεδο y-z. Κατά σύμβαση δεχόμαστε ότι είναι η όψη που φαίνεται αν κοιτάξουμε προς την πλώρη. Σε αυτή την όψη οι προβολές των ελικοειδών γραμμών αναφοράς των υδροτομών είναι προφανώς τόξα ομόκεντρων κύκλων με κέντρο τον άξονα της έλικας. Στο σχήμα 6.11 φαίνεται αυτή η όψη μαζί με την ανεπτυγμένη και την εκτεταμένη όψη. Η προβεβλημένη επιφάνεια (projected area) είναι η επιφάνεια που περικλείεται από το ΥΖ προβεβλημένο περίγραμμα. Από το σχήμα 6.11 φαίνεται ότι το εμβαδόν της υπολογίζεται από την σχέση:
, (0.11) ( )h
R
p te ler
A Z rdθ θ= −∫ r
14

όπου εφαρμόζεται η ίδια σύμβαση για τα πρόσημα της γωνίας θ όπως και για την περίπτωση της γωνίας πλευρικής απόκλισης και Ζ είναι ο αριθμός των πτερυγίων.
Η ΥΖ προβεβλημένη επιφάνεια είναι μικρού ενδιαφέροντος σήμερα. Ωστόσο στα αρχικά στάδια της τεχνολογίας ελίκων είχε χρησιμοποιηθεί εκτεταμένα το μέγεθος της ώσης ανά μονάδα προβεβλημένης επιφάνειας για τον προσδιορισμό της απαιτούμενης επιφάνειας πτερυγίου ώστε να αποφεύγονται οι βλαβερές συνέπειες της σπηλαίωσης. Τονίζεται ότι η προβεβλημένη επιφάνεια βρίσκεται πάνω στο επίπεδο στο οποίο είναι κάθετο το διάνυσμα της ώσης (thrust vector) που αναπτύσσει η έλικα.
Το ανεπτυγμένο περίγραμμα (σχήμα 6.11) προκύπτει ως εξής: στα σημεία της γενέτειρας γραμμής φέρνουμε τον εγγύτατο κύκλο (αποδεικνύεται ότι η ακτίνα του εγγύτατου κύκλου είναι 2secc nr r tθ= και κατασκευαστικά αυτό οδηγεί στον ορισμό του κέντρου C του εγγύτατου κύκλου όπως φαίνεται στα σχήματα 6.11 και 6.13) και παίρνουμε σ’ αυτόν εκατέρωθεν της γενέτειρας γραμμής καμπυλόγραμμα μήκη ίσα με τα πραγματικά μήκη (αποστάσεις των χειλών πρόσπτωσης και εκφυγής από τη γενέτειρα γραμμή) όπως φαίνονται στο σχέδιο εκτεταμένων τομών. Τέλος στρέφουμε το τόξο αυτό κατά τη γωνία βήματος έτσι, ώστε να συμπέσει με το επίπεδο y-z. Για να πάρουμε πάνω στον εγγύτατο κύκλο το σημείο με καμπυλόγραμμο μήκος όσο το εκτεταμένο μήκος χρησιμοποιώντας μόνο διαβήτη μπορούμε να χρησιμοποιήσουμε την ακόλουθη σχέση αναγωγής:
222(1 sin( cos )) sinnt nt
h hl rr r
θ θ⎛ ⎞= − + ⎜ ⎟⎝ ⎠
όπου h το (καμπυλόγραμμο) μήκος (από σχέδιο εκτεταμένων τομών) και l το άνοιγμα του διαβήτη. Να σημειωθεί ότι η τελευταία σχέση έχει ενσωματωμένη την ακτίνα του εγγύτατου κύκλου. Η ανεπτυγμένη όψη χρησιμοποιείται για να δώσει μια εκτίμηση της αληθινής μορφής του πτερυγίου και της κατανομής του μήκους των χορδών. Η ανεπτυγμένη και η ΥΖ προβεβλημένη όψη είναι εκείνες που παρουσιάζονται πάντα στα σχέδια των ελίκων.
Για να υπολογιστεί το εμβαδόν της ανεπτυγμένης επιφάνειας είναι απαραίτητο να γίνει αριθμητική ολοκλήρωση αν απαιτείται μια ακριβής τιμή. Για τις περισσότερες περιπτώσεις όμως αρκεί η ακόλουθη προσέγγιση για την ανεπτυγμένη επιφάνεια AD:
D EA A ,
όπου ΑΕ είναι η εκτεταμένη επιφάνεια του πτερυγίου.
Στο παρελθόν διάφοροι ερευνητές ανέπτυξαν εμπειρικές σχέσεις για την εκτίμηση του εμβαδού της ανεπτυγμένης επιφάνειας. Μια τέτοια σχέση, η οποία προτάθηκε από τον Burill για πτερύγια χωρίς πλευρική απόκλιση (non-skewed forms) είναι:
( )1.067 0.229 /
pD
AA
P D− (0.12)
Εν γένει ωστόσο η ανεπτυγμένη επιφάνεια είναι μεγαλύτερη από την προβεβλημένη και λίγο μικρότερη από την εκτεταμένη.
Ο λόγος επιφάνειας του πτερυγίου (blade area ratio) είναι ο λόγος αντιστοίχως της εκτεταμένης επιφάνειας, της προβεβλημένης ή της ανεπτυγμένης προς την επιφάνεια του δίσκου της έλικας, Αο:
2 2
44 , ,p pE E D
o o o
A AA A A AA D A D A Dπ π
= = = 2
4 D
π (0.13)
15
Σαν παράδειγμα παρουσιάζεται στον ακόλουθο πίνακα 6.1 η διαφορά μεταξύ των τριών λόγων επιφανειών για την έλικα του σχήματος 6.11. Η έλικα έχει υποτεθεί τετράπτερη με σταθερό λόγο βήματος:
Λόγος Προβεβλημένης
Επιφάνειας
Λόγος ανεπτυγμένης
Επιφάνειας
Λόγος εκτεταμένης
Επιφάνειας
0.480 0.574 0.582 Πίνακας 6.1.
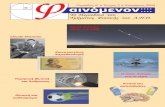
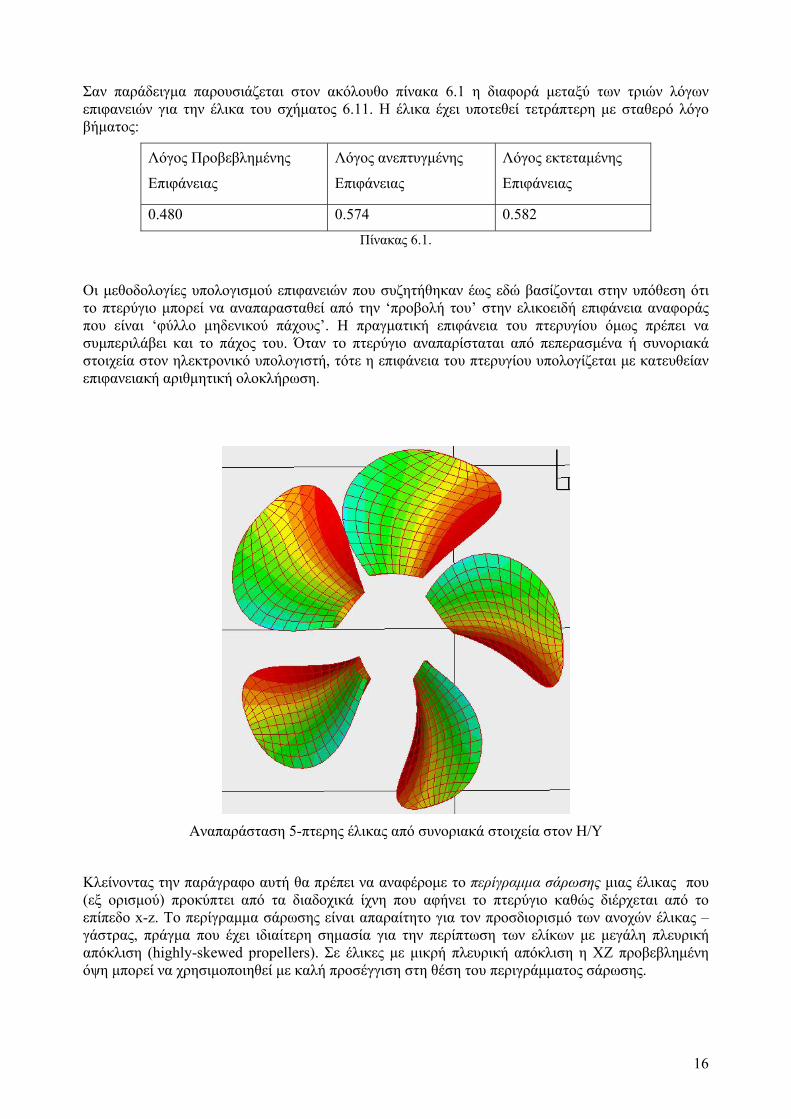
Οι μεθοδολογίες υπολογισμού επιφανειών που συζητήθηκαν έως εδώ βασίζονται στην υπόθεση ότι το πτερύγιο μπορεί να αναπαρασταθεί από την ‘προβολή του’ στην ελικοειδή επιφάνεια αναφοράς που είναι ‘φύλλο μηδενικού πάχους’. Η πραγματική επιφάνεια του πτερυγίου όμως πρέπει να συμπεριλάβει και το πάχος του. Όταν το πτερύγιο αναπαρίσταται από πεπερασμένα ή συνοριακά στοιχεία στον ηλεκτρονικό υπολογιστή, τότε η επιφάνεια του πτερυγίου υπολογίζεται με κατευθείαν επιφανειακή αριθμητική ολοκλήρωση.
Αναπαράσταση 5-πτερης έλικας από συνοριακά στοιχεία στον Η/Υ
Κλείνοντας την παράγραφο αυτή θα πρέπει να αναφέρομε το περίγραμμα σάρωσης μιας έλικας που (εξ ορισμού) προκύπτει από τα διαδοχικά ίχνη που αφήνει το πτερύγιο καθώς διέρχεται από το επίπεδο x-z. Το περίγραμμα σάρωσης είναι απαραίτητο για τον προσδιορισμό των ανοχών έλικας – γάστρας, πράγμα που έχει ιδιαίτερη σημασία για την περίπτωση των ελίκων με μεγάλη πλευρική απόκλιση (highly-skewed propellers). Σε έλικες με μικρή πλευρική απόκλιση η ΧΖ προβεβλημένη όψη μπορεί να χρησιμοποιηθεί με καλή προσέγγιση στη θέση του περιγράμματος σάρωσης.
16
7. ΜΕΘΟΔΟΙ ΣΧΕΔΙΑΣΗΣ ΤΩΝ ΕΛΙΚΩΝ
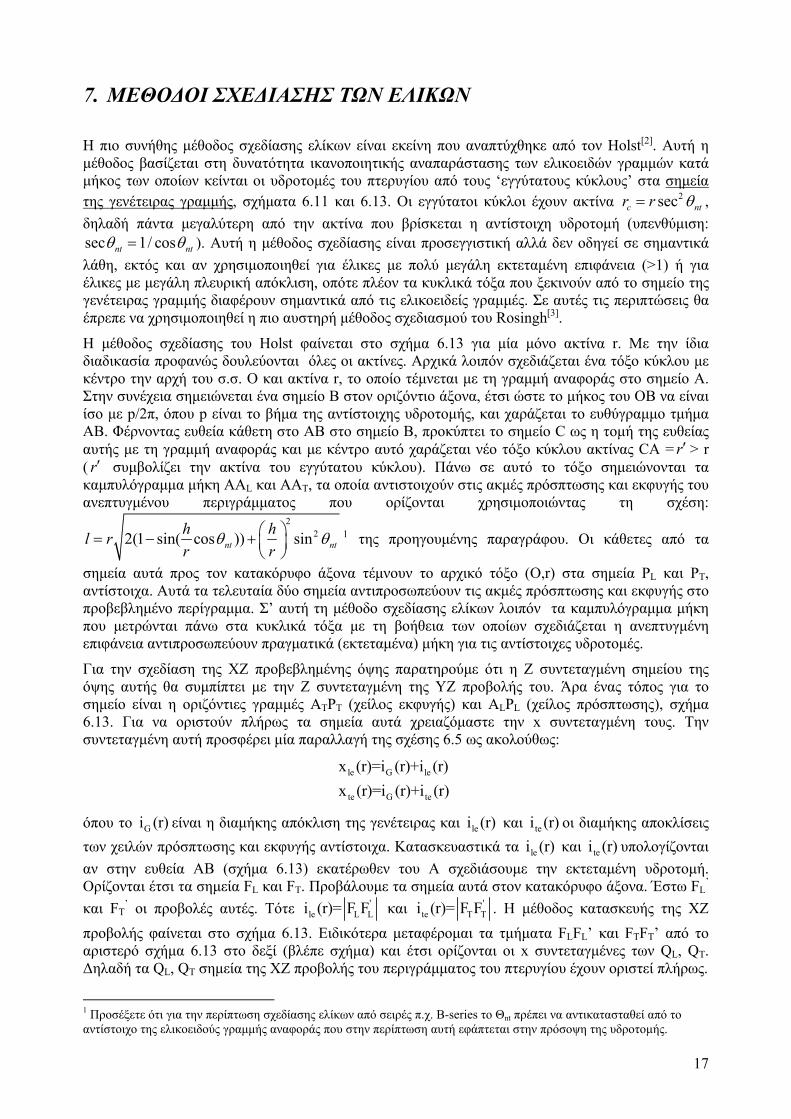
Η πιο συνήθης μέθοδος σχεδίασης ελίκων είναι εκείνη που αναπτύχθηκε από τον Holst[2]. Αυτή η μέθοδος βασίζεται στη δυνατότητα ικανοποιητικής αναπαράστασης των ελικοειδών γραμμών κατά μήκος των οποίων κείνται οι υδροτομές του πτερυγίου από τους ‘εγγύτατους κύκλους’ στα σημεία της γενέτειρας γραμμής, σχήματα 6.11 και 6.13. Οι εγγύτατοι κύκλοι έχουν ακτίνα 2secc ntr r θ= , δηλαδή πάντα μεγαλύτερη από την ακτίνα που βρίσκεται η αντίστοιχη υδροτομή (υπενθύμιση: sec 1/ cosnt ntθ θ= ). Αυτή η μέθοδος σχεδίασης είναι προσεγγιστική αλλά δεν οδηγεί σε σημαντικά λάθη, εκτός και αν χρησιμοποιηθεί για έλικες με πολύ μεγάλη εκτεταμένη επιφάνεια (>1) ή για έλικες με μεγάλη πλευρική απόκλιση, οπότε πλέον τα κυκλικά τόξα που ξεκινούν από το σημείο της γενέτειρας γραμμής διαφέρουν σημαντικά από τις ελικοειδείς γραμμές. Σε αυτές τις περιπτώσεις θα έπρεπε να χρησιμοποιηθεί η πιο αυστηρή μέθοδος σχεδιασμού του Rosingh[3].
Η μέθοδος σχεδίασης του Holst φαίνεται στο σχήμα 6.13 για μία μόνο ακτίνα r. Με την ίδια διαδικασία προφανώς δουλεύονται όλες οι ακτίνες. Αρχικά λοιπόν σχεδιάζεται ένα τόξο κύκλου με κέντρο την αρχή του σ.σ. Ο και ακτίνα r, το οποίο τέμνεται με τη γραμμή αναφοράς στο σημείο Α. Στην συνέχεια σημειώνεται ένα σημείο Β στον οριζόντιο άξονα, έτσι ώστε το μήκος του ΟΒ να είναι ίσο με p/2π, όπου p είναι το βήμα της αντίστοιχης υδροτομής, και χαράζεται το ευθύγραμμο τμήμα ΑΒ. Φέρνοντας ευθεία κάθετη στο ΑΒ στο σημείο Β, προκύπτει το σημείο C ως η τομή της ευθείας αυτής με τη γραμμή αναφοράς και με κέντρο αυτό χαράζεται νέο τόξο κύκλου ακτίνας CA = r′ > r ( r συμβολίζει την ακτίνα του εγγύτατου κύκλου). Πάνω σε αυτό το τόξο σημειώνονται τα καμπυλόγραμμα μήκη AAL και AAT, τα οποία αντιστοιχούν στις ακμές πρόσπτωσης και εκφυγής του ανεπτυγμένου περιγράμματος που ορίζονται χρησιμοποιώντας τη σχέση:
′
222(1 sin( cos )) sinnt nt
h hl rr r
θ θ⎛ ⎞= − + ⎜ ⎟⎝ ⎠
1 της προηγουμένης παραγράφου. Οι κάθετες από τα
σημεία αυτά προς τον κατακόρυφο άξονα τέμνουν το αρχικό τόξο (Ο,r) στα σημεία PL και PT, αντίστοιχα. Αυτά τα τελευταία δύο σημεία αντιπροσωπεύουν τις ακμές πρόσπτωσης και εκφυγής στο προβεβλημένο περίγραμμα. Σ’ αυτή τη μέθοδο σχεδίασης ελίκων λοιπόν τα καμπυλόγραμμα μήκη που μετρώνται πάνω στα κυκλικά τόξα με τη βοήθεια των οποίων σχεδιάζεται η ανεπτυγμένη επιφάνεια αντιπροσωπεύουν πραγματικά (εκτεταμένα) μήκη για τις αντίστοιχες υδροτομές.
Για την σχεδίαση της ΧΖ προβεβλημένης όψης παρατηρούμε ότι η Ζ συντεταγμένη σημείου της όψης αυτής θα συμπίπτει με την Ζ συντεταγμένη της ΥΖ προβολής του. Άρα ένας τόπος για το σημείο είναι η οριζόντιες γραμμές ATPT (χείλος εκφυγής) και ALPL (χείλος πρόσπτωσης), σχήμα 6.13. Για να οριστούν πλήρως τα σημεία αυτά χρειαζόμαστε την x συντεταγμένη τους. Την συντεταγμένη αυτή προσφέρει μία παραλλαγή της σχέσης 6.5 ως ακολούθως:
le G le
te G te
x (r)=i (r)+i (r) x (r)=i (r)+i (r)
όπου το είναι η διαμήκης απόκλιση της γενέτειρας και και οι διαμήκης αποκλίσεις των χειλών πρόσπτωσης και εκφυγής αντίστοιχα. Κατασκευαστικά τα και υπολογίζονται αν στην ευθεία ΑΒ (σχήμα 6.13) εκατέρωθεν του Α σχεδιάσουμε την εκτεταμένη υδροτομή. Ορίζονται έτσι τα σημεία FL και FT. Προβάλουμε τα σημεία αυτά στον κατακόρυφο άξονα. Έστω FL
’ και FT
’ οι προβολές αυτές. Τότε
Gi (r) lei (r) tei (r)
lei (r) tei (r)
'le L Li (r)= F F και '
T TF Ftei (r)=
. Η μέθοδος κατασκευής της ΧΖ προβολής φαίνεται στο σχήμα 6.13. Ειδικότερα μεταφέρομαι τα τμήματα FLFL’ και FTFT’ από το αριστερό σχήμα 6.13 στο δεξί (βλέπε σχήμα) και έτσι ορίζονται οι x συντεταγμένες των QL, QT. Δηλαδή τα QL, QT σημεία της ΧΖ προβολής του περιγράμματος του πτερυγίου έχουν οριστεί πλήρως.
1 Προσέξετε ότι για την περίπτωση σχεδίασης ελίκων από σειρές π.χ. Β-series το Θnt πρέπει να αντικατασταθεί από το αντίστοιχο της ελικοειδούς γραμμής αναφοράς που στην περίπτωση αυτή εφάπτεται στην πρόσοψη της υδροτομής.
17
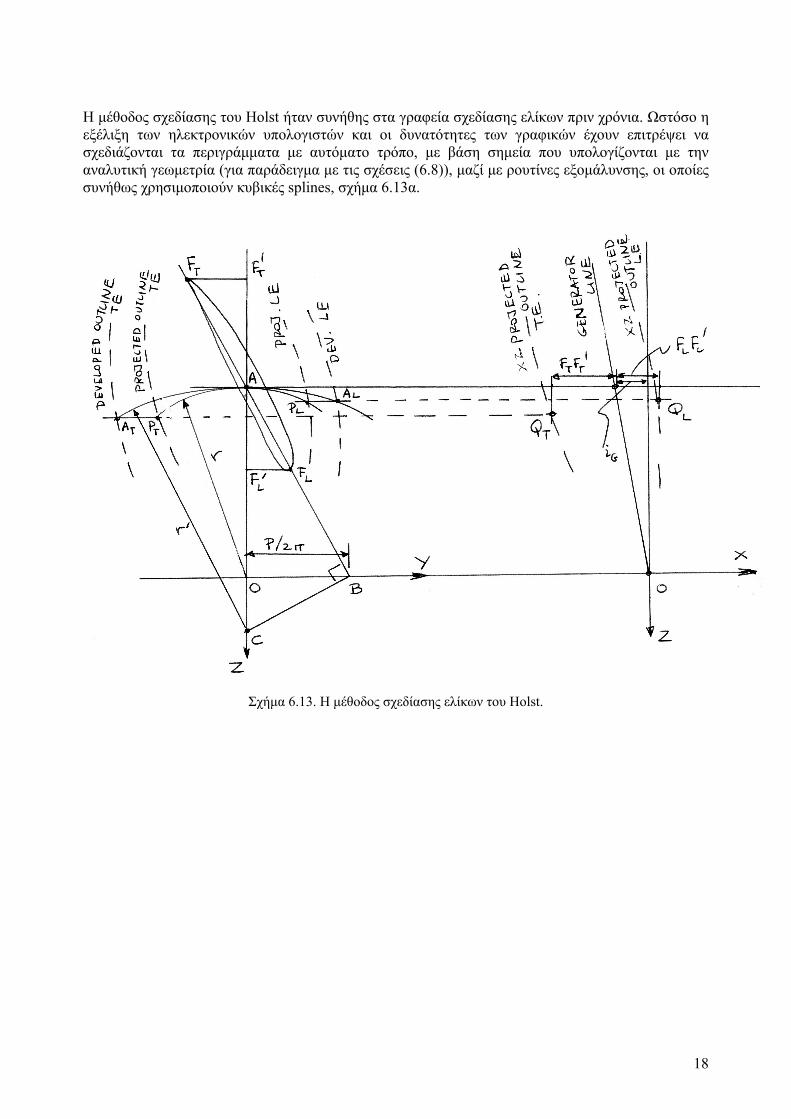
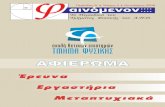
Η μέθοδος σχεδίασης του Holst ήταν συνήθης στα γραφεία σχεδίασης ελίκων πριν χρόνια. Ωστόσο η εξέλιξη των ηλεκτρονικών υπολογιστών και οι δυνατότητες των γραφικών έχουν επιτρέψει να σχεδιάζονται τα περιγράμματα με αυτόματο τρόπο, με βάση σημεία που υπολογίζονται με την αναλυτική γεωμετρία (για παράδειγμα με τις σχέσεις (6.8)), μαζί με ρουτίνες εξομάλυνσης, οι οποίες συνήθως χρησιμοποιούν κυβικές splines, σχήμα 6.13α.
Σχήμα 6.13. Η μέθοδος σχεδίασης ελίκων του Holst.
18
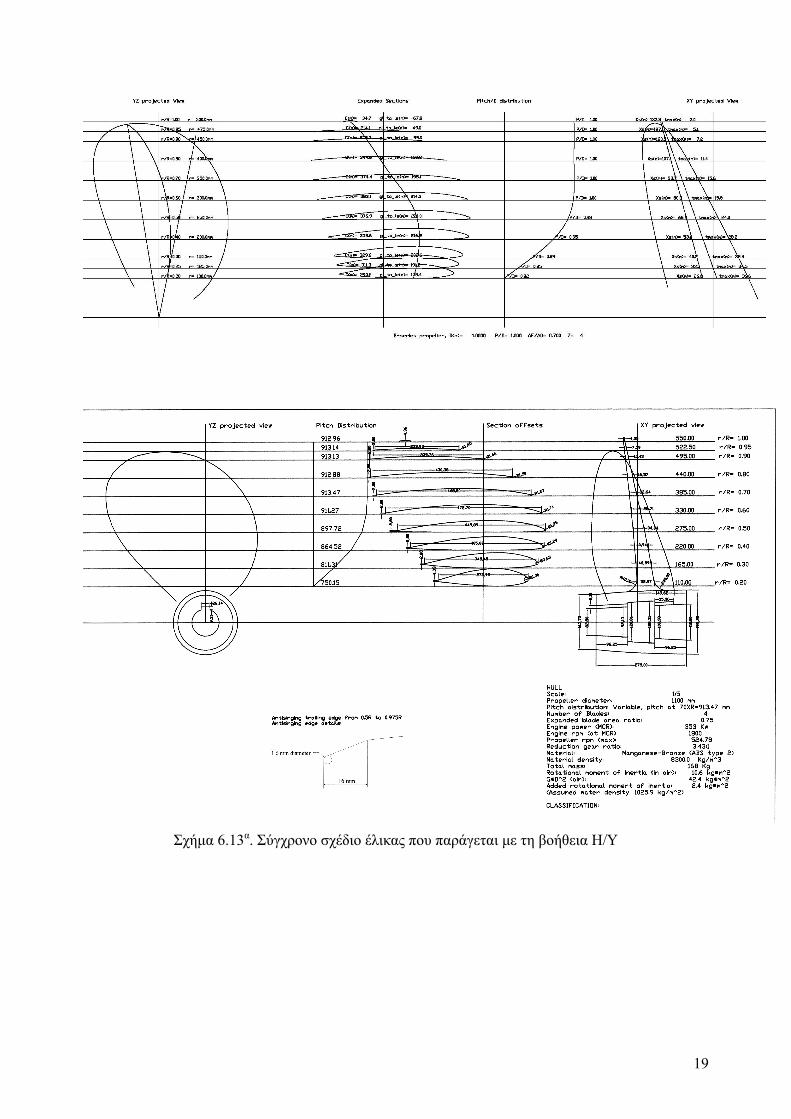
Σχήμα 6.13α. Σύγχρονο σχέδιο έλικας που παράγεται με τη βοήθεια Η/Υ
19
8. ΓΕΩΜΕΤΡΙΑ ΥΔΡΟΤΟΜΩΝ
Στις αρχές της δεκαετίας του 30’ η NACA (National Advisory Committee for Aeronautics) στις ΗΠΑ – η οποία σήμερα είναι γνωστή ως NASA – πραγματοποίησε μια σειρά από πειράματα με αεροτομές, η γεωμετρία των οποίων αναπτύχθηκε με βάση τις ανάγκες της εποχής στην αεροπορική βιομηχανία. Μερικές από αυτές τις αεροτομές έχουν χρησιμοποιηθεί και σε ναυτικές έλικες από κατασκευαστές σε όλον τον κόσμο. Γι’ αυτόν τον λόγο η ακόλουθη συζήτηση για τη γεωμετρία αεροτομών θα έχει ως βάση τους ορισμούς της NACA, τονίζοντας όμως ότι σήμερα μερικοί σχεδιαστές αρχίζουν να δημιουργούν τις δικές τους μορφές υδροτομών προκειμένου να ανταποκριθούν σε συγκεκριμένες απαιτήσεις σχεδίασης ελίκων και ιδιαίτερα σχετικά με το φαινόμενο της σπηλαίωσης.
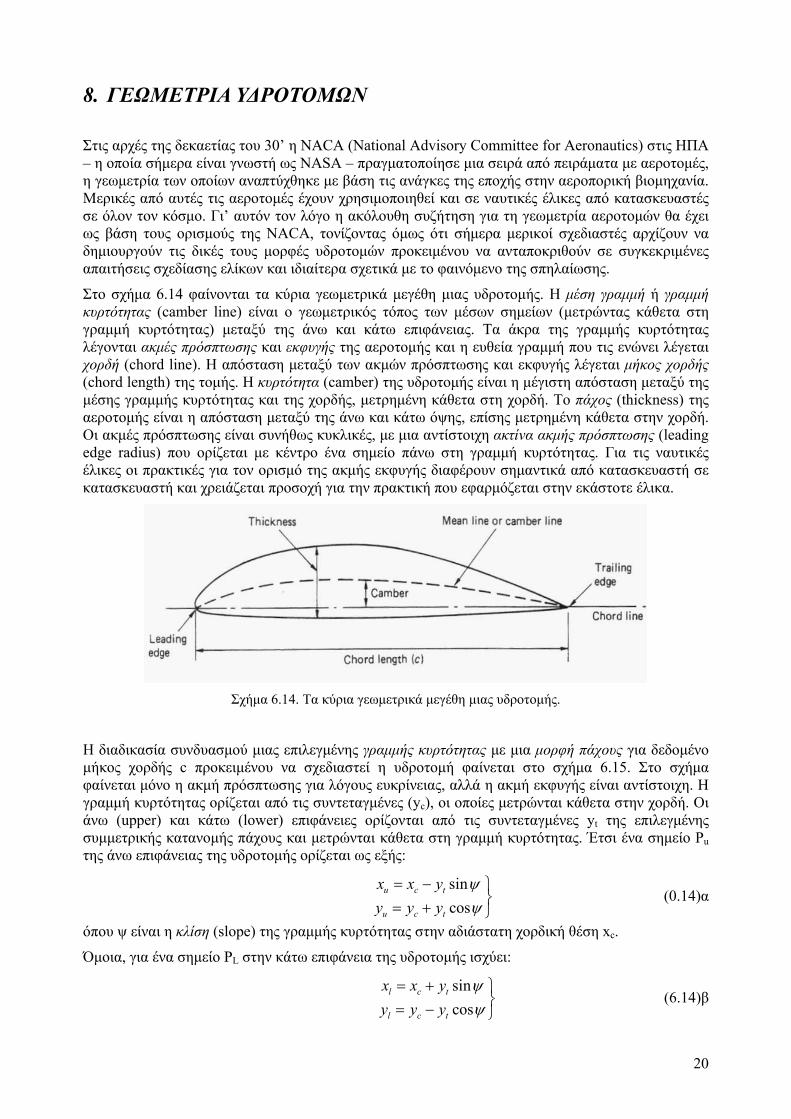
Στο σχήμα 6.14 φαίνονται τα κύρια γεωμετρικά μεγέθη μιας υδροτομής. Η μέση γραμμή ή γραμμή κυρτότητας (camber line) είναι ο γεωμετρικός τόπος των μέσων σημείων (μετρώντας κάθετα στη γραμμή κυρτότητας) μεταξύ της άνω και κάτω επιφάνειας. Τα άκρα της γραμμής κυρτότητας λέγονται ακμές πρόσπτωσης και εκφυγής της αεροτομής και η ευθεία γραμμή που τις ενώνει λέγεται χορδή (chord line). Η απόσταση μεταξύ των ακμών πρόσπτωσης και εκφυγής λέγεται μήκος χορδής (chord length) της τομής. Η κυρτότητα (camber) της υδροτομής είναι η μέγιστη απόσταση μεταξύ της μέσης γραμμής κυρτότητας και της χορδής, μετρημένη κάθετα στη χορδή. Το πάχος (thickness) της αεροτομής είναι η απόσταση μεταξύ της άνω και κάτω όψης, επίσης μετρημένη κάθετα στην χορδή. Οι ακμές πρόσπτωσης είναι συνήθως κυκλικές, με μια αντίστοιχη ακτίνα ακμής πρόσπτωσης (leading edge radius) που ορίζεται με κέντρο ένα σημείο πάνω στη γραμμή κυρτότητας. Για τις ναυτικές έλικες οι πρακτικές για τον ορισμό της ακμής εκφυγής διαφέρουν σημαντικά από κατασκευαστή σε κατασκευαστή και χρειάζεται προσοχή για την πρακτική που εφαρμόζεται στην εκάστοτε έλικα.
Σχήμα 6.14. Τα κύρια γεωμετρικά μεγέθη μιας υδροτομής.
Η διαδικασία συνδυασμού μιας επιλεγμένης γραμμής κυρτότητας με μια μορφή πάχους για δεδομένο μήκος χορδής c προκειμένου να σχεδιαστεί η υδροτομή φαίνεται στο σχήμα 6.15. Στο σχήμα φαίνεται μόνο η ακμή πρόσπτωσης για λόγους ευκρίνειας, αλλά η ακμή εκφυγής είναι αντίστοιχη. Η γραμμή κυρτότητας ορίζεται από τις συντεταγμένες (yc), οι οποίες μετρώνται κάθετα στην χορδή. Οι άνω (upper) και κάτω (lower) επιφάνειες ορίζονται από τις συντεταγμένες yt της επιλεγμένης συμμετρικής κατανομής πάχους και μετρώνται κάθετα στη γραμμή κυρτότητας. Έτσι ένα σημείο Pu της άνω επιφάνειας της υδροτομής ορίζεται ως εξής:
sincos
u c t
u c t
x x yy y y
ψψ
= − ⎫⎬= + ⎭
(0.14)α
όπου ψ είναι η κλίση (slope) της γραμμής κυρτότητας στην αδιάστατη χορδική θέση xc.
Όμοια, για ένα σημείο PL στην κάτω επιφάνεια της υδροτομής ισχύει:
sincos
l c t
l c t
x x yy y y
ψψ
= + ⎫⎬= − ⎭
(6.14)β
20
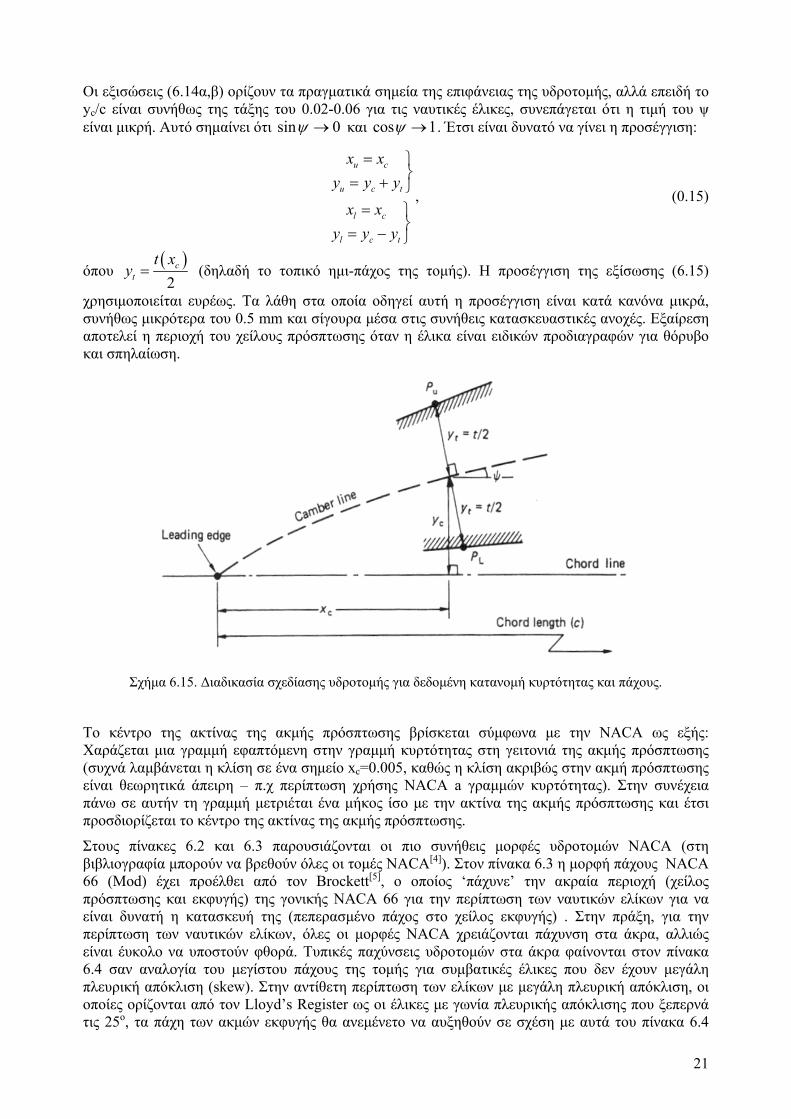
Οι εξισώσεις (6.14α,β) ορίζουν τα πραγματικά σημεία της επιφάνειας της υδροτομής, αλλά επειδή το yc/c είναι συνήθως της τάξης του 0.02-0.06 για τις ναυτικές έλικες, συνεπάγεται ότι η τιμή του ψ είναι μικρή. Αυτό σημαίνει ότι sin 0ψ → και cos 1ψ → . Έτσι είναι δυνατό να γίνει η προσέγγιση:
u c
u c t
l c
l c t
x xy y y
x xy y y
= ⎫⎬= + ⎭
= ⎫⎬= − ⎭
, (0.15)
όπου ( )2
ct
t xy = (δηλαδή το τοπικό ημι-πάχος της τομής). Η προσέγγιση της εξίσωσης (6.15)
χρησιμοποιείται ευρέως. Τα λάθη στα οποία οδηγεί αυτή η προσέγγιση είναι κατά κανόνα μικρά, συνήθως μικρότερα του 0.5 mm και σίγουρα μέσα στις συνήθεις κατασκευαστικές ανοχές. Εξαίρεση αποτελεί η περιοχή του χείλους πρόσπτωσης όταν η έλικα είναι ειδικών προδιαγραφών για θόρυβο και σπηλαίωση.
Σχήμα 6.15. Διαδικασία σχεδίασης υδροτομής για δεδομένη κατανομή κυρτότητας και πάχους.
Το κέντρο της ακτίνας της ακμής πρόσπτωσης βρίσκεται σύμφωνα με την NACA ως εξής: Χαράζεται μια γραμμή εφαπτόμενη στην γραμμή κυρτότητας στη γειτονιά της ακμής πρόσπτωσης (συχνά λαμβάνεται η κλίση σε ένα σημείο xc=0.005, καθώς η κλίση ακριβώς στην ακμή πρόσπτωσης είναι θεωρητικά άπειρη – π.χ περίπτωση χρήσης NACA a γραμμών κυρτότητας). Στην συνέχεια πάνω σε αυτήν τη γραμμή μετριέται ένα μήκος ίσο με την ακτίνα της ακμής πρόσπτωσης και έτσι προσδιορίζεται το κέντρο της ακτίνας της ακμής πρόσπτωσης.
Στους πίνακες 6.2 και 6.3 παρουσιάζονται οι πιο συνήθεις μορφές υδροτομών NACA (στη βιβλιογραφία μπορούν να βρεθούν όλες οι τομές NACA[4]). Στον πίνακα 6.3 η μορφή πάχους NACA 66 (Mod) έχει προέλθει από τον Brockett[5], o οποίος ‘πάχυνε’ την ακραία περιοχή (χείλος πρόσπτωσης και εκφυγής) της γονικής NACA 66 για την περίπτωση των ναυτικών ελίκων για να είναι δυνατή η κατασκευή της (πεπερασμένο πάχος στο χείλος εκφυγής) . Στην πράξη, για την περίπτωση των ναυτικών ελίκων, όλες οι μορφές NACA χρειάζονται πάχυνση στα άκρα, αλλιώς είναι έυκολο να υποστούν φθορά. Τυπικές παχύνσεις υδροτομών στα άκρα φαίνονται στον πίνακα 6.4 σαν αναλογία του μεγίστου πάχους της τομής για συμβατικές έλικες που δεν έχουν μεγάλη πλευρική απόκλιση (skew). Στην αντίθετη περίπτωση των ελίκων με μεγάλη πλευρική απόκλιση, οι οποίες ορίζονται από τον Lloyd’s Register ως οι έλικες με γωνία πλευρικής απόκλισης που ξεπερνά τις 25ο, τα πάχη των ακμών εκφυγής θα ανεμένετο να αυξηθούν σε σχέση με αυτά του πίνακα 6.4
21
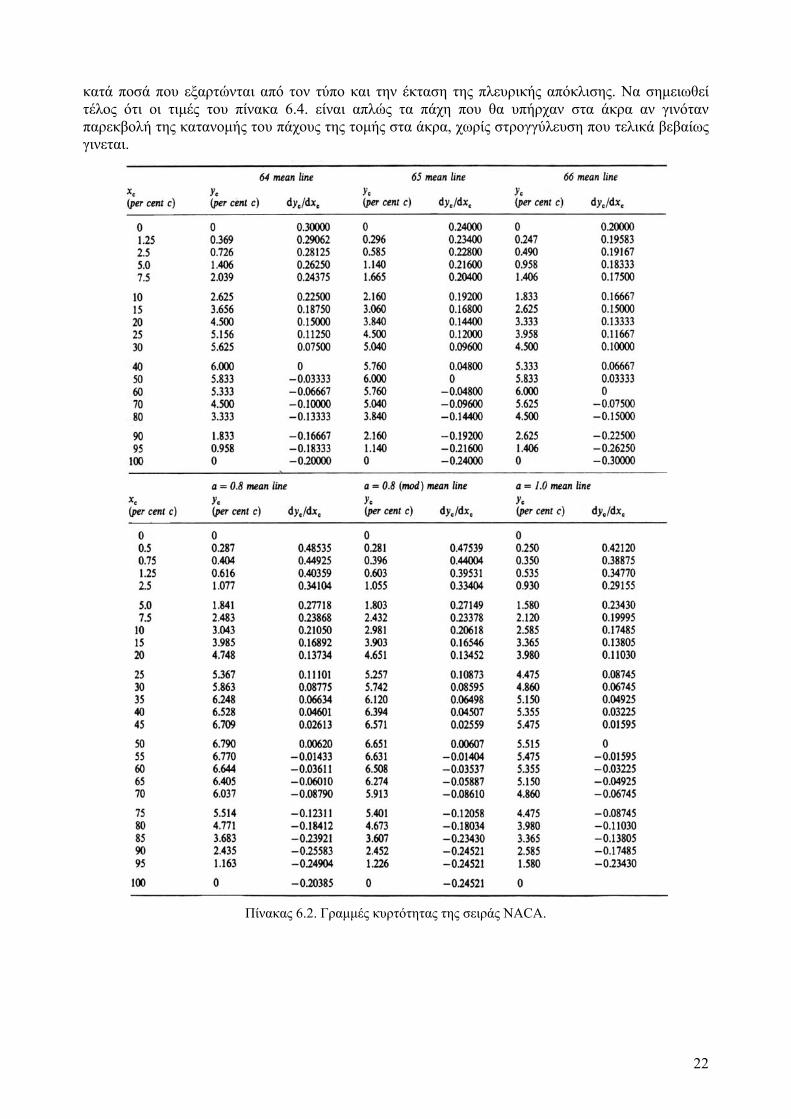
κατά ποσά που εξαρτώνται από τον τύπο και την έκταση της πλευρικής απόκλισης. Να σημειωθεί τέλος ότι οι τιμές του πίνακα 6.4. είναι απλώς τα πάχη που θα υπήρχαν στα άκρα αν γινόταν παρεκβολή της κατανομής του πάχους της τομής στα άκρα, χωρίς στρογγύλευση που τελικά βεβαίως γινεται.
Πίνακας 6.2. Γραμμές κυρτότητας της σειράς NACA.
22
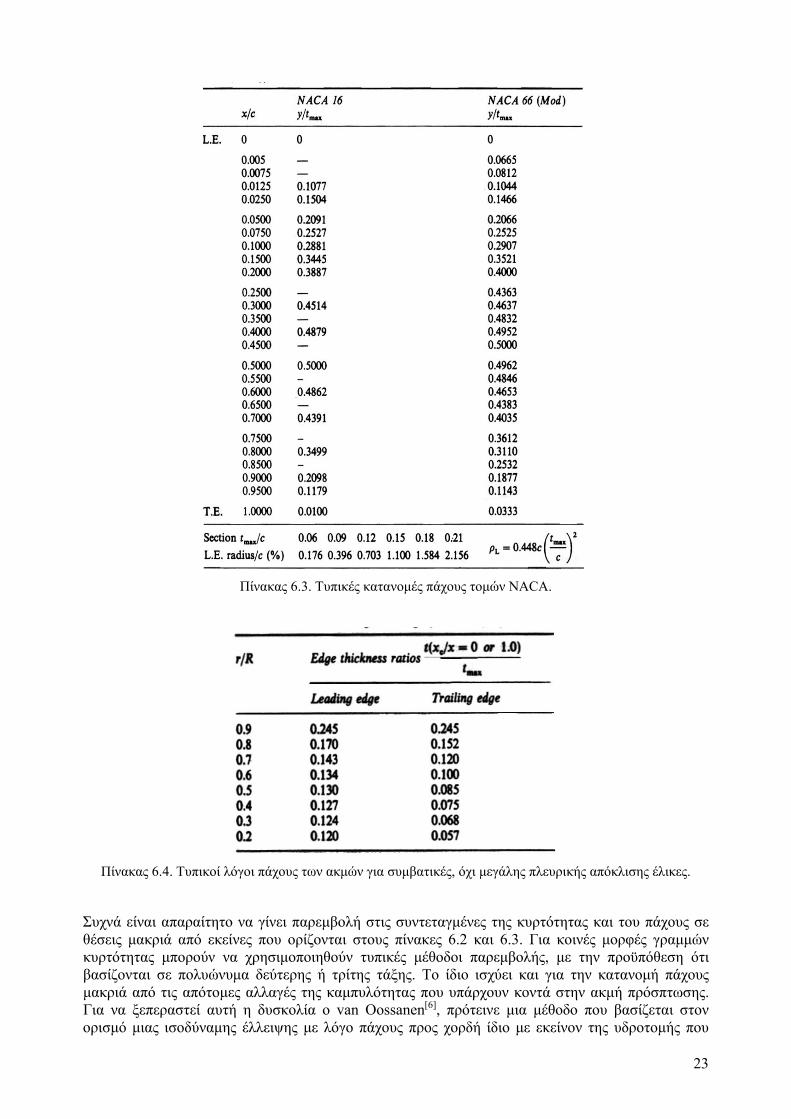
Πίνακας 6.3. Τυπικές κατανομές πάχους τομών NACA.
Πίνακας 6.4. Τυπικοί λόγοι πάχους των ακμών για συμβατικές, όχι μεγάλης πλευρικής απόκλισης έλικες.
Συχνά είναι απαραίτητο να γίνει παρεμβολή στις συντεταγμένες της κυρτότητας και του πάχους σε θέσεις μακριά από εκείνες που ορίζονται στους πίνακες 6.2 και 6.3. Για κοινές μορφές γραμμών κυρτότητας μπορούν να χρησιμοποιηθούν τυπικές μέθοδοι παρεμβολής, με την προϋπόθεση ότι βασίζονται σε πολυώνυμα δεύτερης ή τρίτης τάξης. Το ίδιο ισχύει και για την κατανομή πάχους μακριά από τις απότομες αλλαγές της καμπυλότητας που υπάρχουν κοντά στην ακμή πρόσπτωσης. Για να ξεπεραστεί αυτή η δυσκολία ο van Oossanen[6], πρότεινε μια μέθοδο που βασίζεται στον ορισμό μιας ισοδύναμης έλλειψης με λόγο πάχους προς χορδή ίδιο με εκείνον της υδροτομής που
23

σχεδιάζεται. Το σχήμα 6.16 δείχνει τον τρόπο κατά τον οποίο μπορεί να διαμορφωθεί ένας λόγος πάχους TR μεταξύ της πραγματικής υδροτομής και της ισοδύναμής της:
( )max
1sin cos 1 2 /t
Rt c
yTy x c−
=⎡ ⎤−⎣ ⎦
Σχήμα 6.16. Η μέθοδος παρεμβολής για την κατανομή του πάχους του Oossanen.
Έχοντας επομένως ορίσει τη βάση της γεωμετρίας της υδροτομής, είναι δυνατό να επιστρέψουμε στις σχέσεις (6.8) και να ορίσουμε τις συντεταγμένες για οποιοδήποτε σημείο Ρ στην επιφάνεια της υδροτομής. Το σχήμα 6.17 δείχνει αυτήν τη διαδικασία και οι εξισώσεις που ορίζουν το σημείο Ρ σε σχέση με το τοπικό (στραμμένο κατά φ ) σύστημα συντεταγμένων (Ox, Oy, Oz) δίνονται από τις σχέσεις:
( ) ( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )
,
,
,
tan 0.5 sin cos
0.5 cos sinsin
0.5 cos sincos
P G s nt c nt u l nt
c nt u l ntP s
c nt u l ntP s
x i r c x y
c x yy r
r
c x yz r
r
θ θ θ θ
θ θθ
θ θθ
⎫⎪
= − + + − +⎡ ⎤ ⎪⎣ ⎦⎪
⎡ ⎤⎡ ⎤− − ⎪⎪⎣= − −⎢ ⎥ ⎬⎢ ⎥ ⎪⎣ ⎦
⎪⎡ ⎤⎡ ⎤− − ⎪⎣ ⎦= −⎢ ⎥ ⎪⎢ ⎥ ⎪⎣ ⎦ ⎭
⎦ (0.16)
όπου , cosu l c ty y y ψ= ± όπως στις εξισώσεις (6.14) και 0 cx c≤ ≤ . Για να βρούμε τις αντίστοιχες συντεταγμένες σε σχέση με το ολικό σ.σ. (ΟΧ, ΟΥ, ΟΖ), γράφουμε απλώς τον μετασχηματισμό:
24
1 0 00 cos sin0 sin cos
P p
P p
P p
X xY yZ z
φ φφ φ
⎡ ⎤⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥= − ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
, (0.17)
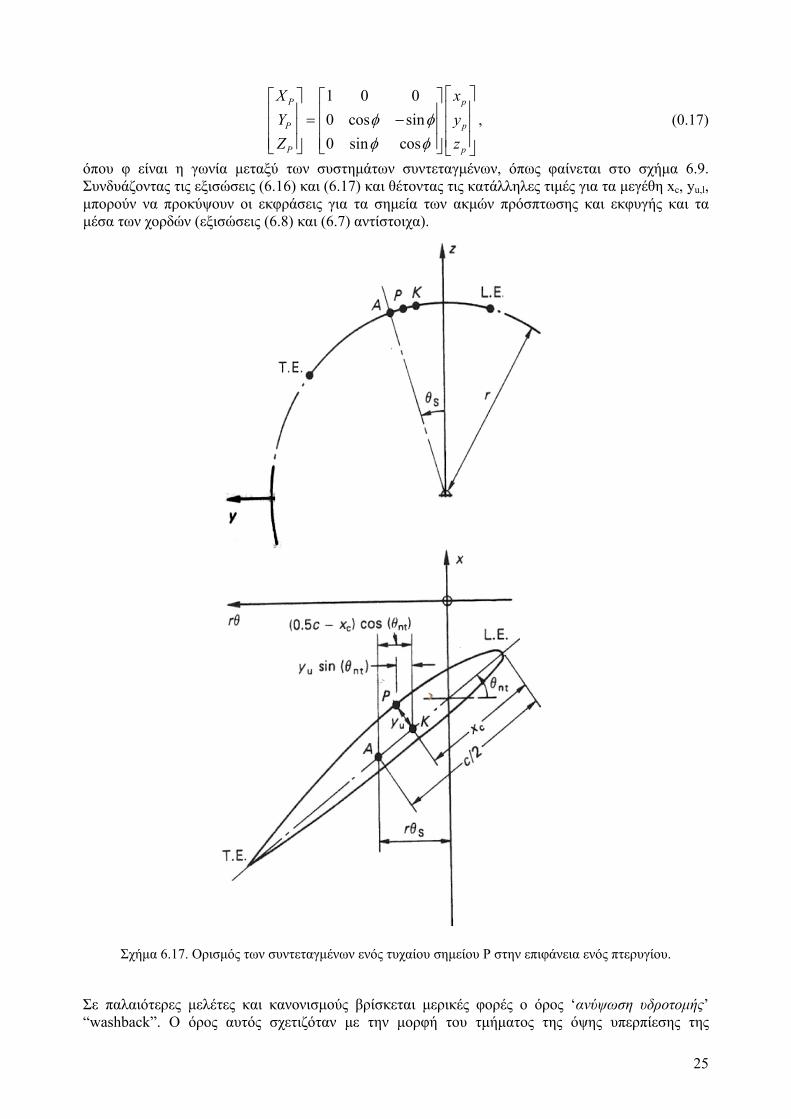
όπου φ είναι η γωνία μεταξύ των συστημάτων συντεταγμένων, όπως φαίνεται στο σχήμα 6.9. Συνδυάζοντας τις εξισώσεις (6.16) και (6.17) και θέτοντας τις κατάλληλες τιμές για τα μεγέθη xc, yu,l, μπορούν να προκύψουν οι εκφράσεις για τα σημεία των ακμών πρόσπτωσης και εκφυγής και τα μέσα των χορδών (εξισώσεις (6.8) και (6.7) αντίστοιχα).
Σχήμα 6.17. Ορισμός των συντεταγμένων ενός τυχαίου σημείου Ρ στην επιφάνεια ενός πτερυγίου.
Σε παλαιότερες μελέτες και κανονισμούς βρίσκεται μερικές φορές ο όρος ‘ανύψωση υδροτομής’ “washback”. Ο όρος αυτός σχετιζόταν με την μορφή του τμήματος της όψης υπερπίεσης της
25
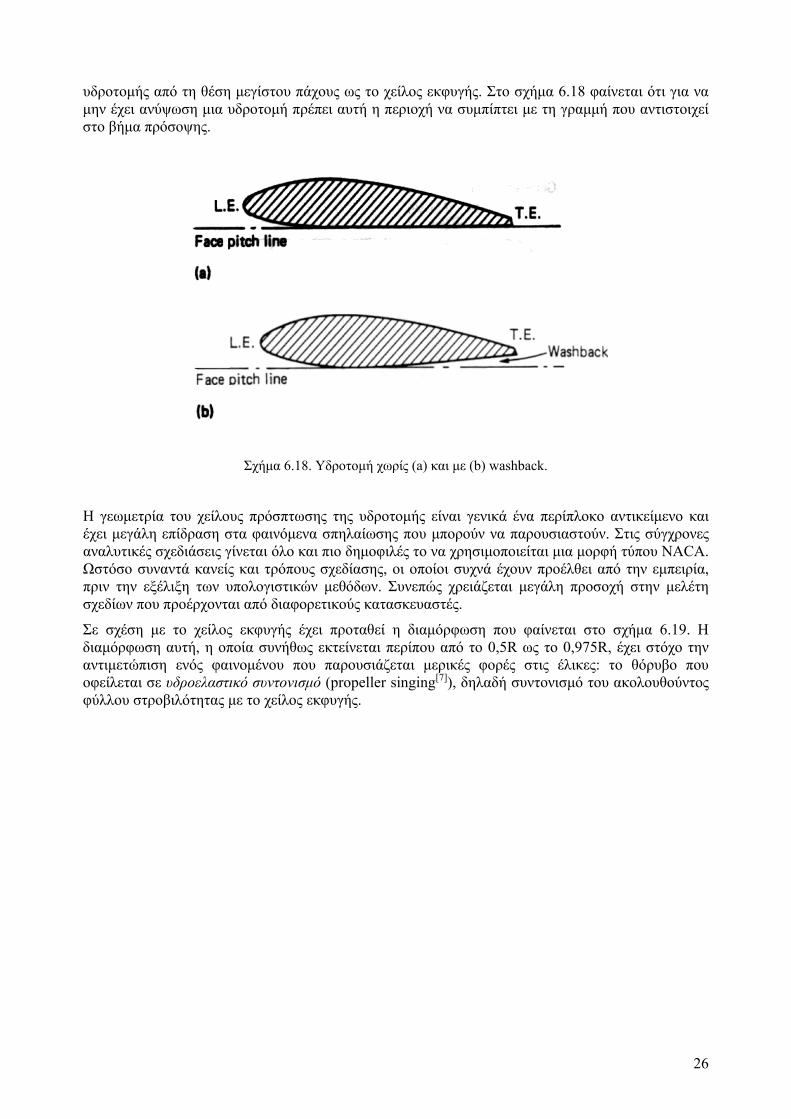
υδροτομής από τη θέση μεγίστου πάχους ως το χείλος εκφυγής. Στο σχήμα 6.18 φαίνεται ότι για να μην έχει ανύψωση μια υδροτομή πρέπει αυτή η περιοχή να συμπίπτει με τη γραμμή που αντιστοιχεί στο βήμα πρόσοψης.
Σχήμα 6.18. Υδροτομή χωρίς (a) και με (b) washback.
Η γεωμετρία του χείλους πρόσπτωσης της υδροτομής είναι γενικά ένα περίπλοκο αντικείμενο και έχει μεγάλη επίδραση στα φαινόμενα σπηλαίωσης που μπορούν να παρουσιαστούν. Στις σύγχρονες αναλυτικές σχεδιάσεις γίνεται όλο και πιο δημοφιλές το να χρησιμοποιείται μια μορφή τύπου NACA. Ωστόσο συναντά κανείς και τρόπους σχεδίασης, οι οποίοι συχνά έχουν προέλθει από την εμπειρία, πριν την εξέλιξη των υπολογιστικών μεθόδων. Συνεπώς χρειάζεται μεγάλη προσοχή στην μελέτη σχεδίων που προέρχονται από διαφορετικούς κατασκευαστές.
Σε σχέση με το χείλος εκφυγής έχει προταθεί η διαμόρφωση που φαίνεται στο σχήμα 6.19. Η διαμόρφωση αυτή, η οποία συνήθως εκτείνεται περίπου από το 0,5R ως το 0,975R, έχει στόχο την αντιμετώπιση ενός φαινομένου που παρουσιάζεται μερικές φορές στις έλικες: το θόρυβο που οφείλεται σε υδροελαστικό συντονισμό (propeller singing[7]), δηλαδή συντονισμό του ακολουθούντος φύλλου στροβιλότητας με το χείλος εκφυγής.
26
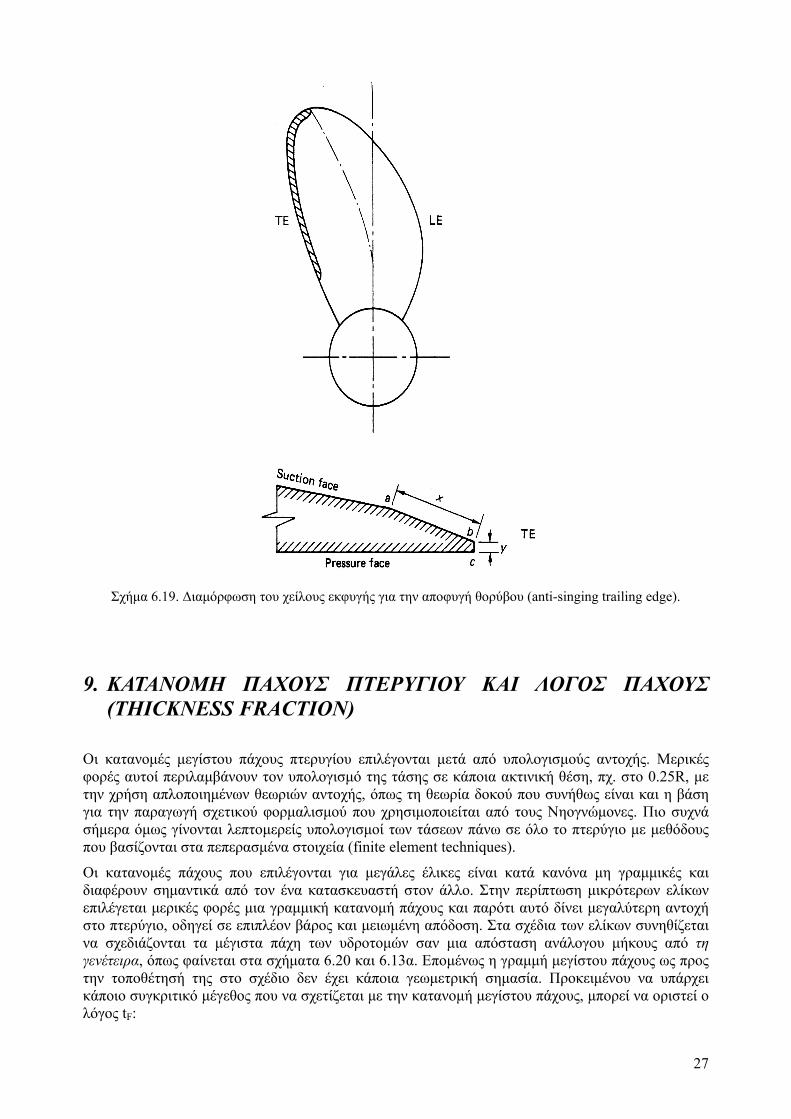
Σχήμα 6.19. Διαμόρφωση του χείλους εκφυγής για την αποφυγή θορύβου (anti-singing trailing edge).
9. ΚΑΤΑΝΟΜΗ ΠΑΧΟΥΣ ΠΤΕΡΥΓΙΟΥ ΚΑΙ ΛΟΓΟΣ ΠΑΧΟΥΣ (THICKNESS FRACTION)
Οι κατανομές μεγίστου πάχους πτερυγίου επιλέγονται μετά από υπολογισμούς αντοχής. Μερικές φορές αυτοί περιλαμβάνουν τον υπολογισμό της τάσης σε κάποια ακτινική θέση, πχ. στο 0.25R, με την χρήση απλοποιημένων θεωριών αντοχής, όπως τη θεωρία δοκού που συνήθως είναι και η βάση για την παραγωγή σχετικού φορμαλισμού που χρησιμοποιείται από τους Νηογνώμονες. Πιο συχνά σήμερα όμως γίνονται λεπτομερείς υπολογισμοί των τάσεων πάνω σε όλο το πτερύγιο με μεθόδους που βασίζονται στα πεπερασμένα στοιχεία (finite element techniques).
Οι κατανομές πάχους που επιλέγονται για μεγάλες έλικες είναι κατά κανόνα μη γραμμικές και διαφέρουν σημαντικά από τον ένα κατασκευαστή στον άλλο. Στην περίπτωση μικρότερων ελίκων επιλέγεται μερικές φορές μια γραμμική κατανομή πάχους και παρότι αυτό δίνει μεγαλύτερη αντοχή στο πτερύγιο, οδηγεί σε επιπλέον βάρος και μειωμένη απόδοση. Στα σχέδια των ελίκων συνηθίζεται να σχεδιάζονται τα μέγιστα πάχη των υδροτομών σαν μια απόσταση ανάλογου μήκους από τη γενέτειρα, όπως φαίνεται στα σχήματα 6.20 και 6.13α. Επομένως η γραμμή μεγίστου πάχους ως προς την τοποθέτησή της στο σχέδιο δεν έχει κάποια γεωμετρική σημασία. Προκειμένου να υπάρχει κάποιο συγκριτικό μέγεθος που να σχετίζεται με την κατανομή μεγίστου πάχους, μπορεί να οριστεί ο λόγος tF:
27
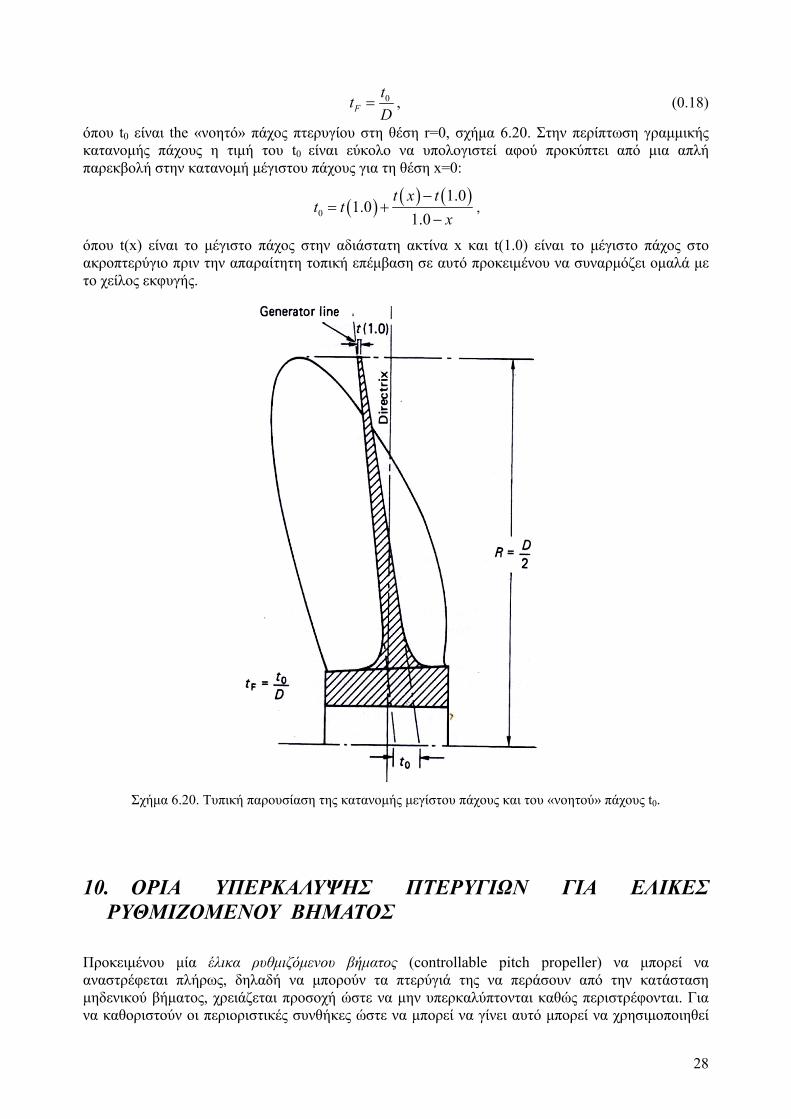
0F
ttD
= , (0.18)
όπου t0 είναι the «νοητό» πάχος πτερυγίου στη θέση r=0, σχήμα 6.20. Στην περίπτωση γραμμικής κατανομής πάχους η τιμή του t0 είναι εύκολο να υπολογιστεί αφού προκύπτει από μια απλή παρεκβολή στην κατανομή μέγιστου πάχους για τη θέση x=0:
( ) ( ) ( )0
1.01.0
1.0t x t
t tx
−= +
−,
όπου t(x) είναι το μέγιστο πάχος στην αδιάστατη ακτίνα x και t(1.0) είναι το μέγιστο πάχος στο ακροπτερύγιο πριν την απαραίτητη τοπική επέμβαση σε αυτό προκειμένου να συναρμόζει ομαλά με το χείλος εκφυγής.
Σχήμα 6.20. Τυπική παρουσίαση της κατανομής μεγίστου πάχους και του «νοητού» πάχους t0.
10. ΟΡΙΑ ΥΠΕΡΚΑΛΥΨΗΣ ΠΤΕΡΥΓΙΩΝ ΓΙΑ ΕΛΙΚΕΣ ΡΥΘΜΙΖΟΜΕΝΟΥ ΒΗΜΑΤΟΣ
Προκειμένου μία έλικα ρυθμιζόμενου βήματος (controllable pitch propeller) να μπορεί να αναστρέφεται πλήρως, δηλαδή να μπορούν τα πτερύγιά της να περάσουν από την κατάσταση μηδενικού βήματος, χρειάζεται προσοχή ώστε να μην υπερκαλύπτονται καθώς περιστρέφονται. Για να καθοριστούν οι περιοριστικές συνθήκες ώστε να μπορεί να γίνει αυτό μπορεί να χρησιμοποιηθεί
28
παραλλαγή της εξίσωσης (6.8) όπου θα ληφθεί υπόψη μια περιστροφή στερεού σώματος για κάθε πτερύγιο. Ακολούθως θα πρέπει να εξεταστεί η ΥΖ προβεβλημένη όψη των πτερυγίων για διάφορες γωνίες στροφής.
Ένα προσεγγιστικό κριτήριο για την αποφυγή υπερκάλυψης βασισμένο στη μέθοδο σχεδίασης του Holt δίνει (Hawdon et al.8) τις ακόλουθες σχέσεις για τα όρια υπερκάλυψης τρίπτερων, τετράπτερων και πεντάπτερων ελίκων μεταβλητού βήματος, αντίστοιχα:
( )( )( )
max
max
max
/ 1.01 0.050 / 1 0.055
/ 0.771 0.025 / 1 0.023
/ 0.632 0.0125 / 1 0.010
c D x P D
c D x P D
c D x P D
⎫⎡ ⎤= + − +⎣ ⎦ ⎪⎪⎡= + − + ⎬⎣ ⎤⎦⎪
⎡ ⎤= + − + ⎪⎣ ⎦⎭
(0.19)
11. ΟΡΟΛΟΓΙΑ ΣΧΕΤΙΚΗ ΜΕ ΤΙΣ ΣΥΜΒΑΤΙΚΕΣ ΕΛΙΚΕΣ
Στη ναυτική μηχανολογία και την αρχιτεκτονική του πλοίου γίνεται χρήση κάποιων επιπλέον όρων σχετικών με τις έλικες που είναι απαραίτητο να διευκρινιστούν.
Οι όροι δεξιόστροφες και αριστερόστροφες έλικες (right- and left- handed propellers) αναφέρονται στη φορά περιστροφής. Στην περίπτωση των δεξιόστροφων η περιστροφή γίνεται κατά τη φορά των δεικτών του ωρολογίου καθώς κοιτάμε από την πρύμνη (from astern) και αντίστοιχα περιγράφεται και η φορά διαγραφής μιας δεξιόστροφης έλικας ελικοειδούς καμπύλης. Αντίθετα η αριστερόστροφη έλικα περιστρέφεται με φορά αντίθετη εκείνης των δεικτών του ωρολογίου καθώς κοιτάμε από την πρύμνη και αντίστοιχα ισχύει για τη φορά διαγραφής μιας αριστερόστροφης ελικοειδούς καμπύλης.
Οι όψεις υπερπίεσης (face) και υποπίεσης (back) των ελίκων είναι όροι που μπορεί να αναφέρονται στο πτερύγιο ή στην έλικα σαν όλον ή στη γεωμετρία των υδροτομών ξεχωριστά. Η όψη υπερπίεσης μιας έλικας είναι η πλευρά που φαίνεται όταν κοιτάμε από την πρύμνη και κατά μήκος του άξονα της έλικας. Έτσι οι όψεις υπερπίεσης των υδροτομών των πτερυγίων είναι εκείνες που συνιστούν την πλευρά υψηλής πίεσης (pressure side) της έλικας κατά την πρόσω λειτουργία της. Το αντίθετο ισχύει για τις όψεις υποπίεσης (suction sides).
12. Η ΠΛΗΜΝΗ ΤΗΣ ΕΛΙΚΑΣ
Το στερεό σώμα πάνω στο οποίο εδράζονται τα πτερύγια της έλικας και το οποίο χρησιμεύει για την μεταφορά των δυνάμεων που αναπτύσσονται στα πτερύγια, στον άξονα της έλικας, λέγεται «πλήμνη». Το σχέδιο έλικας περιέχει απαραίτητα και τα γεωμετρικά στοιχεία της πλήμνης. Το μήκος της πλήμνης προκύπτει από την ανάγκη η υδροτομή του πτερυγίου της έλικας στην περιοχή της «ρίζας» να εδράζεται στην πλήμνη τηρουμένων και των απαραίτητων ακτινών καμπυλότητας μετάβασης (fillet) ώστε να αποφεύγονται οι συγκεντρώσεις τάσεων. Ενδεικτικά (στατιστικά) στοιχεία για το μέγεθος της πλήμνης δίνονται στο σχήμα και τον πίνακα που ακολουθεί (O’ Brien, 1962). Να σημειωθεί ότι η διάμετρος του άξονα της έλικας Ds υπολογίζεται από τους νηογνώμονες με βάση το υλικό του άξονα και την μεταφερομένη ροπή.
29
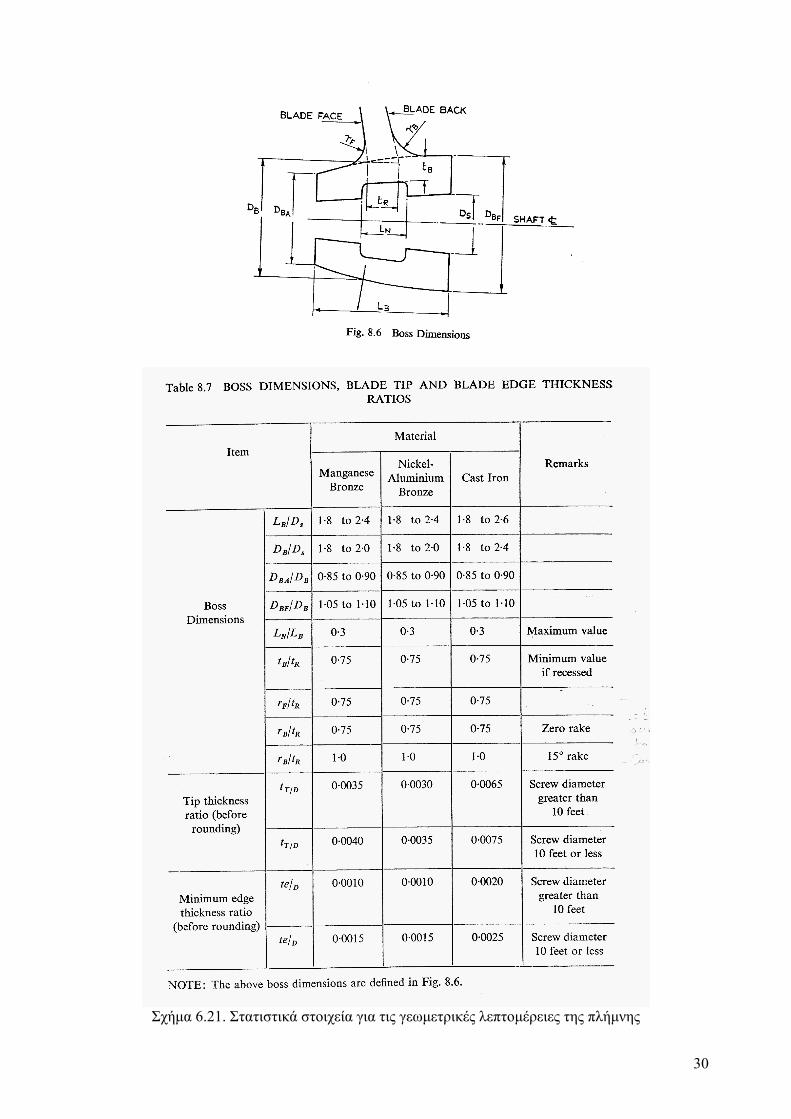
Σχήμα 6.21. Στατιστικά στοιχεία για τις γεωμετρικές λεπτομέρειες της πλήμνης
30
13. ΧΕΙΡΙΣΜΟΣ ΤΗΣ ΓΕΩΜΕΤΡΙΑΣ ΤΗΣ ΕΛΙΚΑΣ ΜΕ ΤΗ ΒΟΗΘΕΙΑ Η/Υ – ΕΝΑ ΑΠΛΟ ΠΑΡΑΔΕΙΓΜΑ ΣΕ FORTRAN 95
Εστω ότι η γεωμετρία της έλικας περιγράφεται σε ένα σύστημα συντεταγμένων με τον οριζόντιο άξονα Χ να δείχνει πρώρα, τον άξονα Υ να είναι κατακόρυφος και τον Ζ να συμπληρώνει το τρισορθογώνιο σύστημα αναφοράς της έλικας. Ένα τέτοιο σύστημα διαφέρει από αυτό του σχήματος 6.1.α ως προς τις κατευθύνσεις των αξόνων. Παρόλα αυτά θα το χρησιμοποιήσουμε στην παράγραφο αυτή διότι είναι αυτό που κατεξοχήν χρησιμοποιείται στην αναλυτική σχεδίαση της έλικας.
Το πρόβλημα που θέλουμε να λύσουμε είναι το ακόλουθο:
Δεδομένης της γεωμετρίας της γενέτειρας γραμμής (generator line), του βήματος της ελικοειδούς επιφάνειας αναφοράς και της πλευρικής απόκλισης των χειλών πρόσπτωσης και εκφυγής να βρεθεί η γεωμετρία της γραμμής αναφοράς του πτερυγίου (blade reference line).
Οι σχέσεις που δίνουν τις κυλινδρικές συντεταγμένες (με τη σειρά: r,θ,x) της γραμμής αναφοράς του πτερυγίου (r, ms, mr) συναρτήσει της κατανομής βήματος (r, P), των πλευρικών αποκλίσεων των χειλών πρόσπτωσης (r, sle) και εκφυγής (r, ste) και της διαμήκους απόκλισης της γενέτειρας gx είναι οι ακόλουθες, σχήμα 6.22:
1tan ( )2ntP
rθ
π−=
te lec s s= − , (το s θεωρείται θετικό από Υ προς Ζ)
( ) cos2s le ntcm s θ= + / r , (ms σε ακτίνια)
( ) sin2r g lecm x s ntθ= + +
31
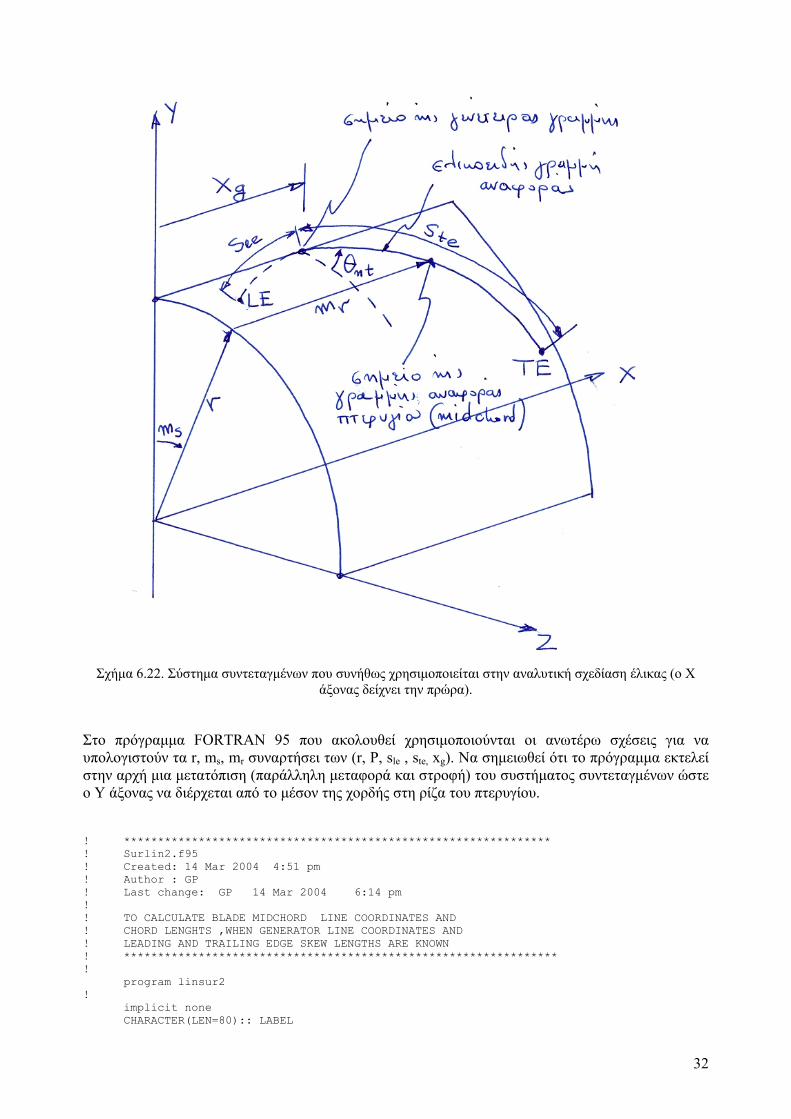
Σχήμα 6.22. Σύστημα συντεταγμένων που συνήθως χρησιμοποιείται στην αναλυτική σχεδίαση έλικας (ο Χ
άξονας δείχνει την πρώρα).
Στο πρόγραμμα FORTRAN 95 που ακολουθεί χρησιμοποιούνται οι ανωτέρω σχέσεις για να υπολογιστούν τα r, ms, mr συναρτήσει των (r, P, sle , ste, xg). Να σημειωθεί ότι το πρόγραμμα εκτελεί στην αρχή μια μετατόπιση (παράλληλη μεταφορά και στροφή) του συστήματος συντεταγμένων ώστε ο Υ άξονας να διέρχεται από το μέσον της χορδής στη ρίζα του πτερυγίου.
! *************************************************************** ! Surlin2.f95 ! Created: 14 Mar 2004 4:51 pm ! Author : GP ! Last change: GP 14 Mar 2004 6:14 pm ! ! TO CALCULATE BLADE MIDCHORD LINE COORDINATES AND ! CHORD LENGHTS ,WHEN GENERATOR LINE COORDINATES AND ! LEADING AND TRAILING EDGE SKEW LENGTHS ARE KNOWN ! **************************************************************** ! program linsur2 ! implicit none CHARACTER(LEN=80):: LABEL
32
REAL, DIMENSION(20):: radius,pitch,chord,glrake,s_lead,s_trail,phi REAL:: diam,dhub INTEGER:: i,nr REAL:: pi,x_rel,gl_to_midch, midch_skew_angle,midch_skew_angle_deg,& midch_rake , midch_skew_ang,midch_skew_ang_deg ! OPEN(5,FILE='INPUT') OPEN(6,FILE='OUTPUT') ! ! ------------------------Read input data------------------------- READ (5,5) LABEL WRITE(6,5) LABEL 5 FORMAT(a80) ! all dimensions in milimeters... READ(5,*) DIAM,DHUB, NR WRITE(6,11) DIAM,DHUB, NR 11 FORMAT(2F10.4,I10) ! IF(nr>20) STOP ' no of radial positions greater than 20 !! ' ! READ(5,*) (radius(I),pitch(I),s_lead(I),chord(I),glrake(I),I=1,NR) WRITE(6,12) (radius(I),pitch(I),s_lead(I),chord(I),glrake(I),I=1,NR) 12 FORMAT(5F10.4) ! note that root radius should coincide with hub radius IF(ABS(DHUB-2.*radius(1))>0.00001) STOP ' Data Error in RHUB' ! PI =4.*ATAN(1.) ! introduce pi ! do i=1,nr ! loop on radii - calculate trailing edge curvilinear distance s_trail(I) =s_lead(I) + chord(I) phi(I) =ATAN(pitch(I)/(2.*PI*radius(I)) ) ! find pitch angle end do ! find new position of the propeller coordinate system, ! Y axis through midchord at root: gl_to_midch = s_lead(1)+chord(1)/2. x_rel = glrake(1) + gl_to_midch*SIN(phi(1)) ! angle at cyl. coord. syst.: midch_skew_angle = gl_to_midch*COS(PHI(1))/radius(1) midch_skew_angle_deg = midch_skew_angle*180./PI ! WRITE(6,15) label,DIAM,DHUB, x_rel, midch_skew_angle_deg 15 FORMAT(/A80/ & ' *************************************************************'/ & ' * RUNNING PROGRAM S U R L I N *'/ & ' *************************************************************'// & ' M A I N D A T A '/ & ' Propeller diameter =',F9.3,' mm'/ & ' Hub diameter =',F9.3,' mm'// & ' R E S U L T S '/ & ' Axial displ.of the l.line coord. system =',F9.3,' mm'/ & ' Angular displ.of the l.line coord. system =',F7.3,' deg'// & ' r(mm) c(mm) P(mm) Gener. Sl(mm) St(mm) Midch. Midch.'/ & ' Rake (mm) Skew(deg) Rake(m)') ! ------------------------------------------------------------------ do i=1,nr midch_rake = glrake(I)-x_rel+(s_lead(I)+chord(I)/2.)*SIN(phi(I)) midch_skew_ang = (s_lead(I)+chord(I)/2.)*COS(phi(I))/radius(I)- & midch_skew_angle midch_skew_ang_deg = midch_skew_ang*180./PI WRITE(6,50) radius(I),chord(I),pitch(I),glrake(I),s_lead(I),s_trail(I), & midch_skew_ang_deg,midch_rake end do 50 FORMAT(8(1X,F7.2)) ! CLOSE(5); CLOSE(6) stop end program
33

34
14. ΒΙΒΛΙΟΓΡΑΦΙΑ
1. Maritime Technology Monograph No 6, ITTC Dictionary of Ship Hydrodynamics, RINA, 1978.
2. Holst C.P., The Geometry of the Screw Propeller, Leiden, 1924.
3. Rosingh W.H.C.E., Over de constructie en sterkteberekening van hoogbelaste scheepsschroeven, Schip en Werf, pp. 103-121, 1937.
4. Abbott I.H., Doenhoff A.E. von, Theory of Wing Sections, Dover, 1959.
5. Brockett T., Minimum Pressure Envelopes for Modified NACA 66 Sections with NACA α=0.8 Camber and BUships Type I and Type II Sections, DT NSRDC Report No 1780, February 1966.
6. Oossanen P. van., Calculation of Performance and Cavitation Characteristics of Propellers, Including Effects of Non-Uniform Flow and Viscosity, NSMB Publication 457, 1974.
7. Van de Voorde, The Singing of Ship Propellers, ISP, 1960.
8. O’ Brien., ‘The Design of Marine Screw Propellers’, Hutcinson Scientific @ Technical, London, 1962.
9. Carlton J.S. ‘ Marine Propellers and Propulsion’, Butterworth, Heinmann, 1994
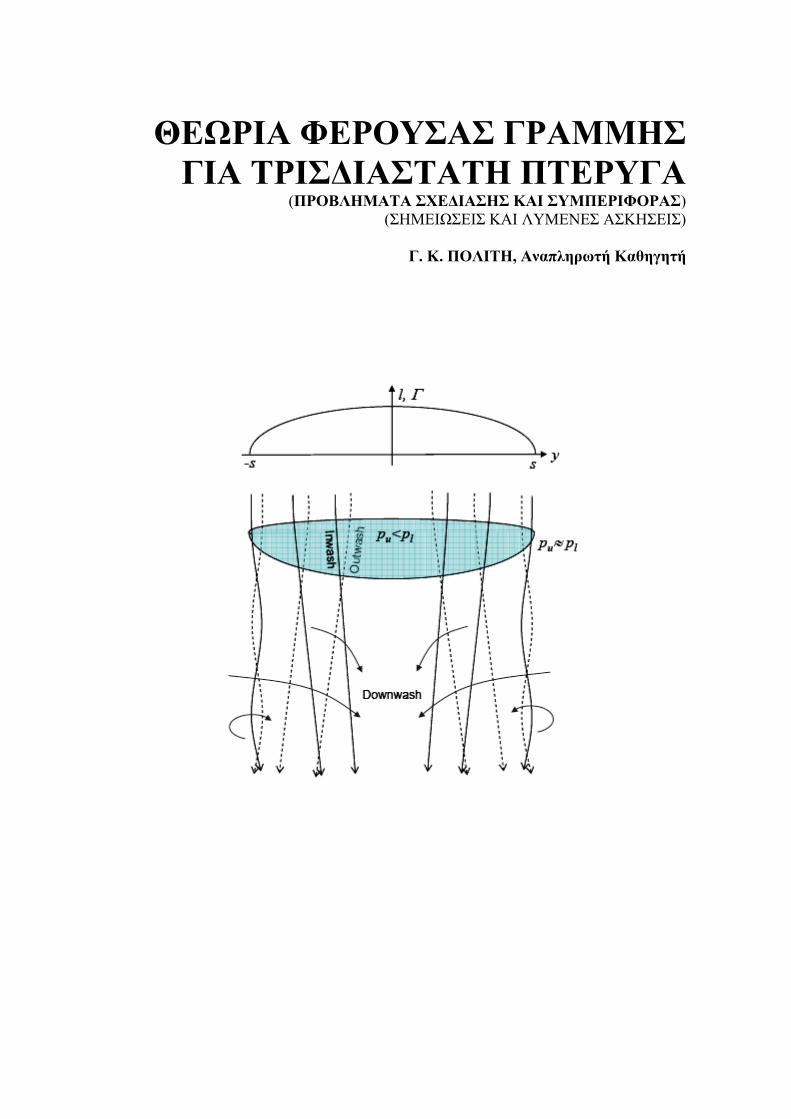
ΘΕΩΡΙΑ ΦΕΡΟΥΣΑΣ ΓΡΑΜΜΗΣ ΓΙΑ ΤΡΙΣΔΙΑΣΤΑΤΗ ΠΤΕΡΥΓΑ
(ΠΡΟΒΛΗΜΑΤΑ ΣΧΕΔΙΑΣΗΣ ΚΑΙ ΣΥΜΠΕΡΙΦΟΡΑΣ) (ΣΗΜΕΙΩΣΕΙΣ ΚΑΙ ΛΥΜΕΝΕΣ ΑΣΚΗΣΕΙΣ)
Γ. Κ. ΠΟΛΙΤΗ, Αναπληρωτή Καθηγητή
ΠΕΡΙΕΧΟΜΕΝΑ Εισαγωγή 1. Οι νόμοι που διέπουν την κίνηση της στροβιλότητας. Τα θεωρήματα Helmholtz .... 3 2. Φαινομενολογία της ροής γύρω από πτέρυγα, το σύστημα δινών και το μοντέλο παγωμένου ομόρρου. ............................................................................................................ 5 3. ‘Ευρηματική’ εισαγωγή στη θεωρία φέρουσας γραμμής για πτερύγια. Προαπαιτούμενα για μια αυστηρή εισαγωγή στην θεωρία φέρουσας γραμμής Lanchester - Prandtl ................................................................................................................................ 9 4. Η έννοια της επαγόμενης ταχύτητας (νόμος των Biot-Savart) ................................ 10 5. Σχέση μεταξύ της φόρτισης του πτερυγίου και της ακολουθούσης στροβιλότητος, το μοντέλο της θεωρίας φέρουσας γραμμής. ..................................................................... 13 6. Κατώρευμα ............................................................................................................... 16
6.1. Οι συνέπειες του κατωρεύματος – Αντίσταση λόγω ακολουθούσης στροβιλότητος ................................................................................................................. 16
7. Υπολογισμός των αεροδυναμικών χαρακτηριστικών πτέρυγας για την περίπτωση απλής φόρτισης ελλειπτικής μορφής .................................................................................. 19
7.1. Υπολογισμός των αεροδυναμικών χαρακτηριστικών πτέρυγας για την περίπτωση τροποποιημένης ελλειπτικής κατανομής φόρτισης. ..................................... 21 7.2. Υπολογισμός των αεροδυναμικών χαρακτηριστικών πτέρυγας για την περίπτωση γενικής κατανομής φόρτισης στα πλαίσια της θεωρίας φέρουσας γραμμής. 26
8. Η ολοκληρωτική/διαφορική εξίσωση φέρουσας γραμμής για την πτέρυγα. Προβλήματα συμπεριφοράς και σχεδίασης ....................................................................... 33
8.1. Αριθμητικά παραδείγματα .................................................................................. 36 9. Μη γραμμικά μοντέλα ομόρρου ............................................................................... 41 10. Βιβλιογραφία ............................................................................................................ 43 Άσκηση.
2
Εισαγωγή Η θεωρία στροβιλότητος για τρισδιάστατη πτέρυγα αναπτύχθηκε από τους Lanchester και Prandtl. Πριν την ανάπτυξη της θεωρίας στροβιλότητας η μοναδική πηγή άντλησης των ιδιοτήτων των τρισδιαστάτων πτερύγων ήταν τα πειράματα. Η ανάπτυξη της θεωρίας Lanchester και Prandtl επέτρεψε τόσο τον υπολογισμό της φόρτισης πτερυγίου δεδομένης γεωμετρίας (πρόβλημα συμπεριφοράς ή ανάλυσης) όσο και τον υπολογισμό της γεωμετρίας πτερυγίου όταν η φόρτιση είναι προκαθορισμένη (πρόβλημα σχεδίασης). Στις παραγράφους που ακολουθούν θα εξετάσουμε τις λεπτομέρειες της θεωρίας των Lanchester και Prandtl. 1. Οι νόμοι που διέπουν την κίνηση της στροβιλότητας. Τα θεωρήματα Helmholtz
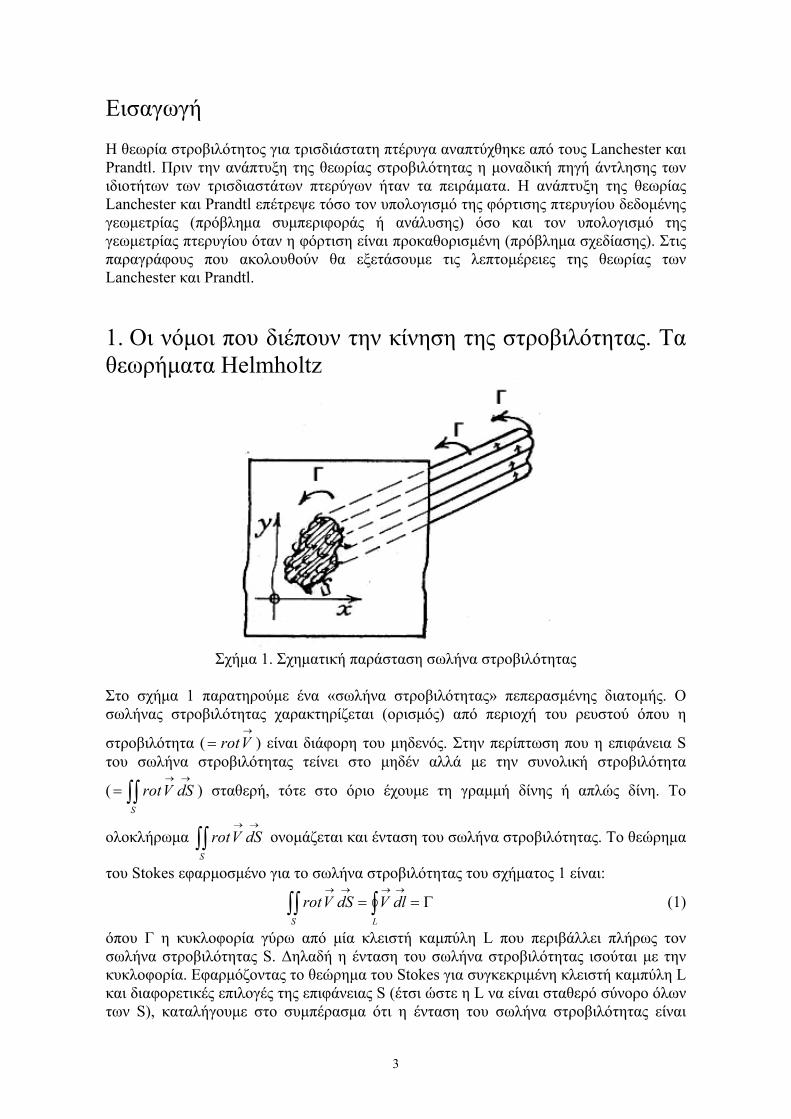
Σχήμα 1. Σχηματική παράσταση σωλήνα στροβιλότητας
Στο σχήμα 1 παρατηρούμε ένα «σωλήνα στροβιλότητας» πεπερασμένης διατομής. Ο σωλήνας στροβιλότητας χαρακτηρίζεται (ορισμός) από περιοχή του ρευστού όπου η
στροβιλότητα ( ) είναι διάφορη του μηδενός. Στην περίπτωση που η επιφάνεια S του σωλήνα στροβιλότητας τείνει στο μηδέν αλλά με την συνολική στροβιλότητα
( ) σταθερή, τότε στο όριο έχουμε τη γραμμή δίνης ή απλώς δίνη. Το
ολοκλήρωμα ονομάζεται και ένταση του σωλήνα στροβιλότητας. Το θεώρημα
του Stokes εφαρμοσμένο για το σωλήνα στροβιλότητας του σχήματος 1 είναι:
→
= Vrot
∫∫→→
S
dSVrot
∫∫→→
=S
dSVrot
Γ==→→→→
∫∫∫ dlVdSVrotLS
(1)
όπου Γ η κυκλοφορία γύρω από μία κλειστή καμπύλη L που περιβάλλει πλήρως τον σωλήνα στροβιλότητας S. Δηλαδή η ένταση του σωλήνα στροβιλότητας ισούται με την κυκλοφορία. Εφαρμόζοντας το θεώρημα του Stokes για συγκεκριμένη κλειστή καμπύλη L και διαφορετικές επιλογές της επιφάνειας S (έτσι ώστε η L να είναι σταθερό σύνορο όλων των S), καταλήγουμε στο συμπέρασμα ότι η ένταση του σωλήνα στροβιλότητας είναι
3
σταθερή ανεξάρτητα της διατομής. Η ιδιότητα αυτή του σωλήνα στροβιλότητας ονομάζεται «συνέχεια της στροβιλότητας». Το ότι η στροβιλότητα ικανοποιεί τη διαφορική εξίσωση της συνέχειας και άρα συμπεριφέρεται (από άποψη συνέχειας) όπως το πεδίο ταχύτητας, μπορεί να αποδειχθεί και άμεσα αφού ισχύει η ταυτότητα
. Επακόλουθο της συνέχειας της στροβιλότητας είναι ότι όταν η διατομή
μικραίνει η στροβιλότητα θα πρέπει να μεγαλώνει και αντιθέτως. Η συνέχεια της στροβιλότητας ονομάζεται και πρώτο θεώρημα του Helmholtz.
0=⎟⎠⎞
⎜⎝⎛ →
Vrotdiv
→
Vrot
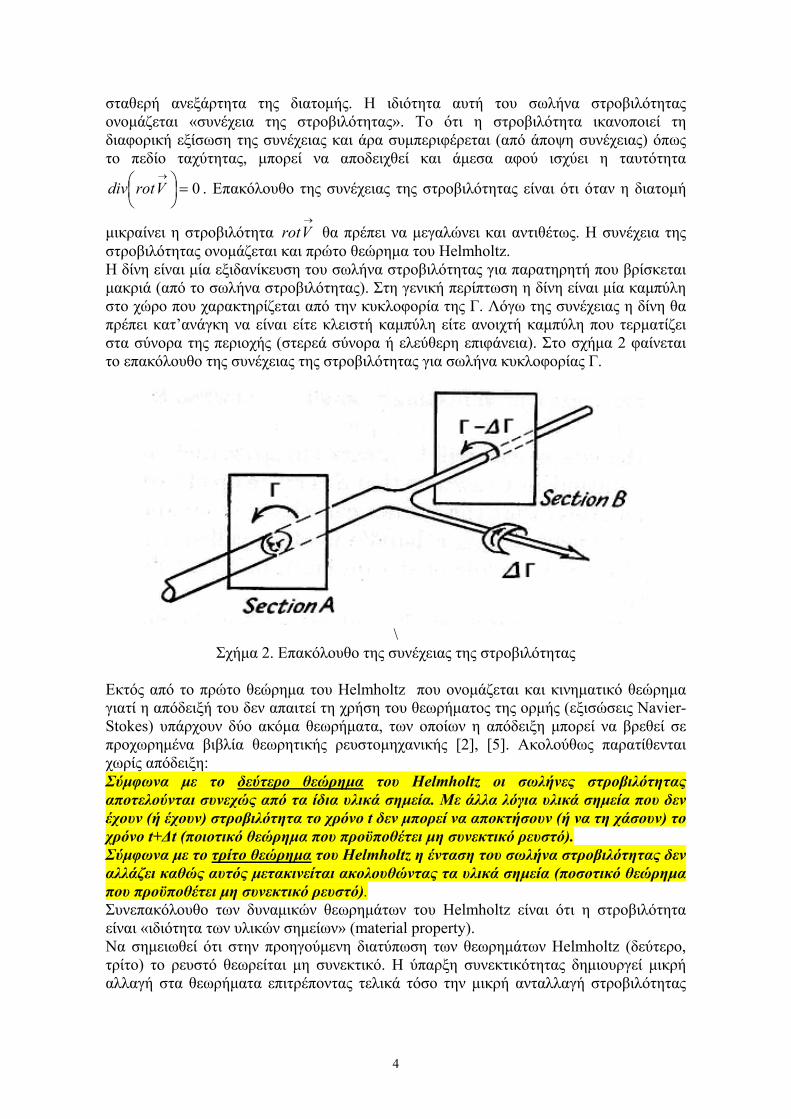
Η δίνη είναι μία εξιδανίκευση του σωλήνα στροβιλότητας για παρατηρητή που βρίσκεται μακριά (από το σωλήνα στροβιλότητας). Στη γενική περίπτωση η δίνη είναι μία καμπύλη στο χώρο που χαρακτηρίζεται από την κυκλοφορία της Γ. Λόγω της συνέχειας η δίνη θα πρέπει κατ’ανάγκη να είναι είτε κλειστή καμπύλη είτε ανοιχτή καμπύλη που τερματίζει στα σύνορα της περιοχής (στερεά σύνορα ή ελεύθερη επιφάνεια). Στο σχήμα 2 φαίνεται το επακόλουθο της συνέχειας της στροβιλότητας για σωλήνα κυκλοφορίας Γ.
\
Σχήμα 2. Επακόλουθο της συνέχειας της στροβιλότητας Εκτός από το πρώτο θεώρημα του Helmholtz που ονομάζεται και κινηματικό θεώρημα γιατί η απόδειξή του δεν απαιτεί τη χρήση του θεωρήματος της ορμής (εξισώσεις Navier-Stokes) υπάρχουν δύο ακόμα θεωρήματα, των οποίων η απόδειξη μπορεί να βρεθεί σε προχωρημένα βιβλία θεωρητικής ρευστομηχανικής [2], [5]. Ακολούθως παρατίθενται χωρίς απόδειξη: Σύμφωνα με το δεύτερο θεώρημα του Helmholtz οι σωλήνες στροβιλότητας αποτελούνται συνεχώς από τα ίδια υλικά σημεία. Με άλλα λόγια υλικά σημεία που δεν έχουν (ή έχουν) στροβιλότητα το χρόνο t δεν μπορεί να αποκτήσουν (ή να τη χάσουν) το χρόνο t+Δt (ποιοτικό θεώρημα που προϋποθέτει μη συνεκτικό ρευστό). Σύμφωνα με το τρίτο θεώρημα του Helmholtz η ένταση του σωλήνα στροβιλότητας δεν αλλάζει καθώς αυτός μετακινείται ακολουθώντας τα υλικά σημεία (ποσοτικό θεώρημα που προϋποθέτει μη συνεκτικό ρευστό). Συνεπακόλουθο των δυναμικών θεωρημάτων του Helmholtz είναι ότι η στροβιλότητα είναι «ιδιότητα των υλικών σημείων» (material property). Να σημειωθεί ότι στην προηγούμενη διατύπωση των θεωρημάτων Helmholtz (δεύτερο, τρίτο) το ρευστό θεωρείται μη συνεκτικό. Η ύπαρξη συνεκτικότητας δημιουργεί μικρή αλλαγή στα θεωρήματα επιτρέποντας τελικά τόσο την μικρή ανταλλαγή στροβιλότητας
4
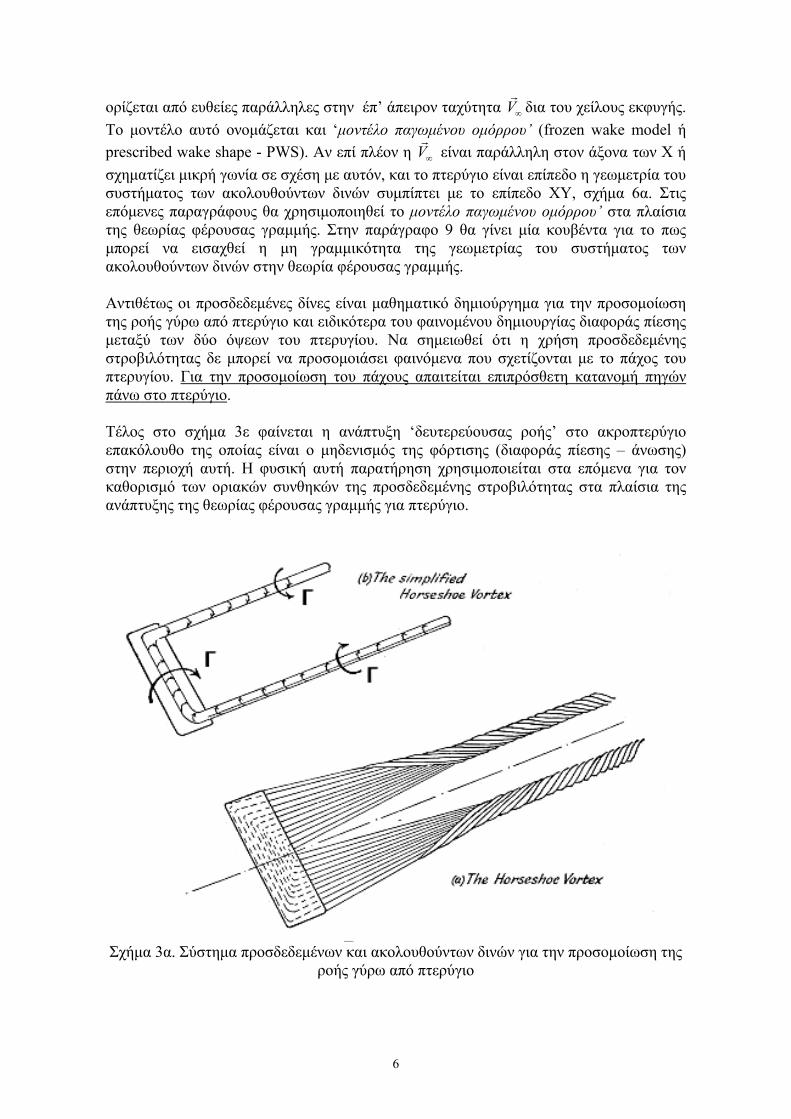
μεταξύ γειτονικών υλικών σημείων όσο και την υποβάθμιση της έντασης του σωλήνα στροβιλότητας κατά την κίνησή του (συνεκτική διάχυση της στροβιλότητας). 2. Φαινομενολογία της ροής γύρω από πτέρυγα, το σύστημα δινών και το μοντέλο παγωμένου ομόρρου. Η συνεισφορά του Lanchester, στην ανάπτυξη μοντέλου για την προσομοίωση της ροής γύρω από πτερύγιο, αφορούσε την αντικατάσταση του πτερυγίου και ιδιαίτερα της ιδιότητάς του να παράγει άνωση, από σύστημα δινών, σχήμα 3. Το σύστημα δινών που χρησιμοποίησε ο Lanchester μπορεί να χωριστεί σε τρία υποσυστήματα: • Το σύστημα προσδεδεμένων δινών ( bound vortex system), το οποίο τοποθετείται
πάνω στο πτερύγιο και είναι υπεύθυνο για την αναπαράσταση του μηχανισμού δημιουργίας άνωσης, σχήμα 3α.
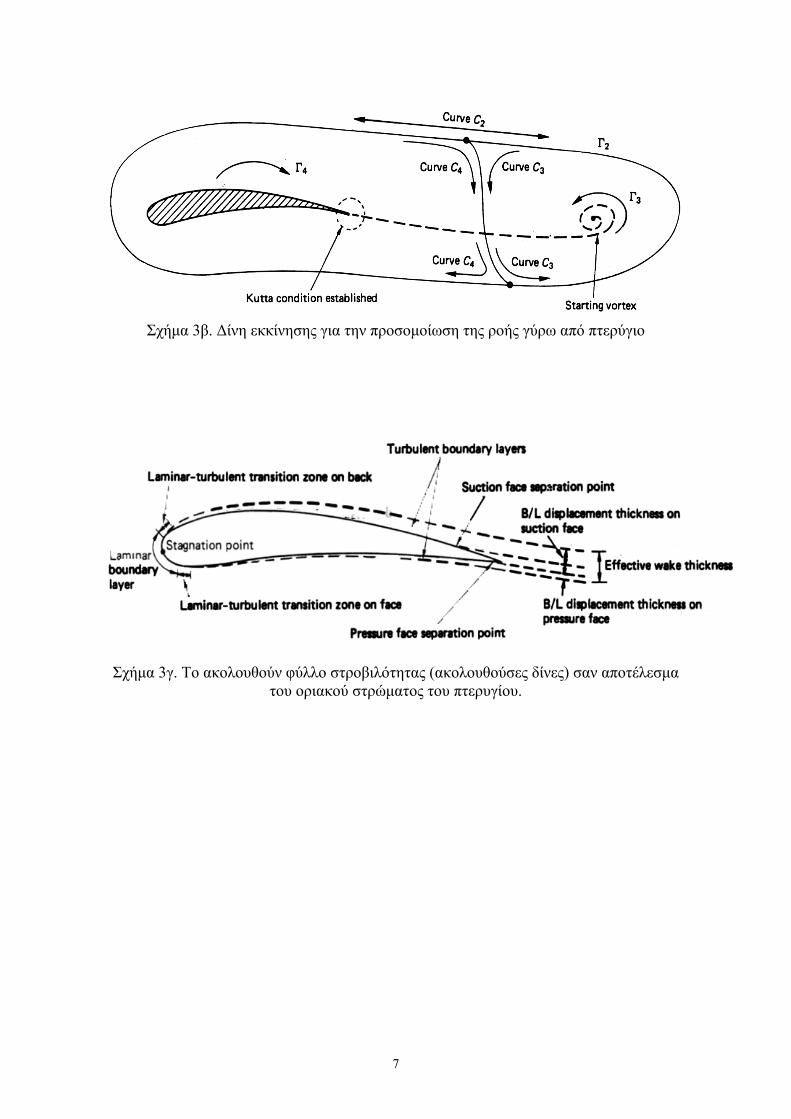
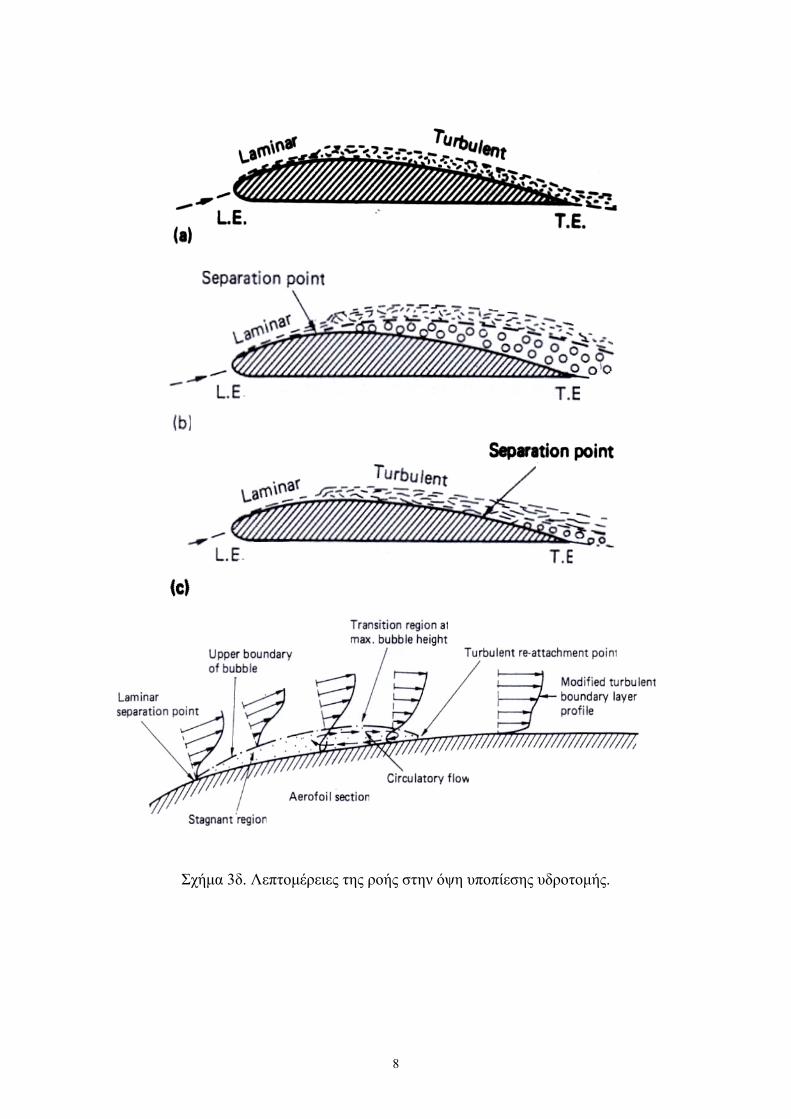
• Το σύστημα ακολουθούντων δινών (trailing vortex system), το οποίο μπορεί να θεωρηθεί σαν το ίχνος του οριακού στρώματος του πτερυγίου στον ομόρρου. Στα σχήματα 3γ,δ φαίνονται οι λεπτομέρειες της αναπτυξης του οριακού στρώματος (περιοχή με στροβιλότητα) στην επιφάνεια μιας υδροτομής. Να σημειωθεί ότι η ‘κατανομή τής στροβιλότητας’ στον ομόρρου του πτερυγίου είναι επακόλουθο των νόμων του Helmholtz (κινηματικού-ένταση- και δυναμικών-θέση-) για την στροβιλότητα.
• Τη δίνη εκκίνησης (starting vortex), η οποία παρατηρείται μόνο κατά την εκκίνηση του πτερυγίου από ακινησία ή κατά τις μεταβατικές καταστάσεις. Η δίνη αυτή αναπτύσσεται και εξελίσσεται επίσης ακολουθώντας τους νόμους του Helmholtz, σχήμα 3β.
Αναλύοντας περαιτέρω τη σημασία των τριών προηγουμένων συστημάτων δινών θα πρέπει να διαχωρίσουμε τις προσδεδεμένες δίνες από τις ακολουθούσες και τη δίνη εκκίνησης. Ειδικότερα οι ακολουθούσες δίνες και η δίνη εκκίνησης είναι «μορφές ροής» (ελεύθερες δίνες) και ως εκ τούτου θα πρέπει να ικανοποιούν φυσικούς νόμους όπως η συνέχεια και η διατήρηση της ορμής ή των ισοδυνάμων (με τη συνέχεια και τη διατήρηση της ορμής) νόμων του Helmholtz [5]. Επιπλέον οι ακολουθούσες δίνες και η δίνη εκκίνησης μπορεί να ανιχνευθούν πειραματικά με μεθόδους οπτικοποίησης της ροής, όπως ο μετρητής στροβιλότητας. Το πρόβλημα της αναπαράστασης της γεωμετρίας του συστήματος των ακολουθούντων δινών εισάγει μία εσωτερική μη γραμμικότητα στην μαθηματική μοντελοποίηση της ροής γύρω από πτέρυγα αφού αποτελεί ‘σύνορο του προβλήματος’ το οποίο όμως είναι κατ αρχήν άγνωστο (free boundary problem)!! Δηλαδή για να είναι γνωστή η θέση του πρέπει να είναι γνωστή η ροή αφού οι νόμοι του Helmholtz εμπεριέχουν την συνολική ταχύτητα (αδιατάρακτη + διαταραχή) [5]!!. Για την παράκαμψη της μη γραμμικότητας οι ερευνητές προχώρησαν σε ‘ευρηματικές’ απλοποιήσεις σχετικά με την γεωμετρία του συστήματος των ακολουθούντων δινών. Ειδικότερα εάν η ροή είναι μόνιμη είναι τετριμμένο αποτέλεσμα των νόμων του Helmholtz ότι οι ακολουθούσες δίνες θα κείνται σε επιφάνεια ροής [5]!! Οι ακολουθούσες δίνες ξεκινούν από το χείλος εκφυγής αφού είναι αποτέλεσμα του οριακού στρώματος του πτερυγίου. Αν επί πλέον υποθέσουμε ότι οι ταχύτητες διαταραχής (λόγω ύπαρξης της πτέρυγας) είναι μικρό ποσοστό της έπ’ άπειρον ταχύτητας V∞ , καταλήγουμε στο συμπέρασμα ότι μια πρώτη προσέγγιση –σύμφωνη με τους νόμους του Helmholtz- για την γεωμετρία του συστήματος των ακολουθούντων δινών παρέχεται από την επιφάνεια που
5
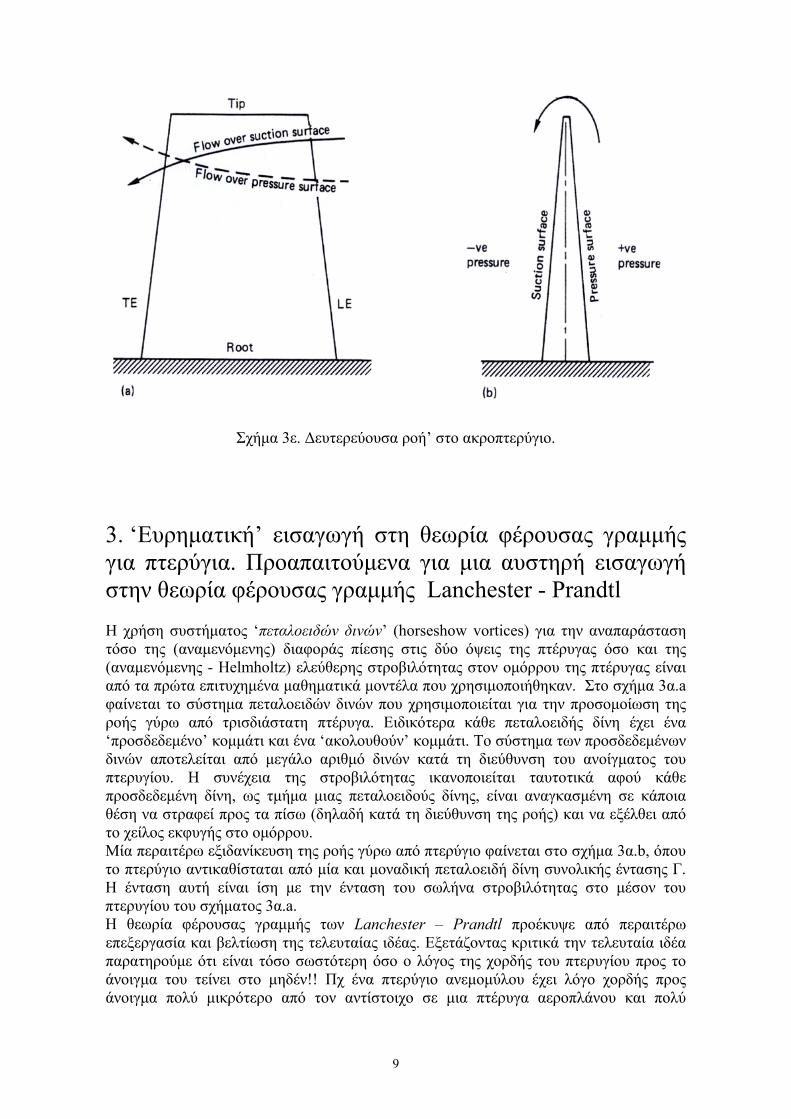
ορίζεται από ευθείες παράλληλες στην έπ’ άπειρον ταχύτητα V∞ δια του χείλους εκφυγής. Το μοντέλο αυτό ονομάζεται και ‘μοντέλο παγωμένου ομόρρου’ (frozen wake model ή prescribed wake shape - PWS). Αν επί πλέον η V∞ είναι παράλληλη στον άξονα των Χ ή σχηματίζει μικρή γωνία σε σχέση με αυτόν, και το πτερύγιο είναι επίπεδο η γεωμετρία του συστήματος των ακολουθούντων δινών συμπίπτει με το επίπεδο XΥ, σχήμα 6α. Στις επόμενες παραγράφους θα χρησιμοποιηθεί το μοντέλο παγωμένου ομόρρου’ στα πλαίσια της θεωρίας φέρουσας γραμμής. Στην παράγραφο 9 θα γίνει μία κουβέντα για το πως μπορεί να εισαχθεί η μη γραμμικότητα της γεωμετρίας του συστήματος των ακολουθούντων δινών στην θεωρία φέρουσας γραμμής. Αντιθέτως οι προσδεδεμένες δίνες είναι μαθηματικό δημιούργημα για την προσομοίωση της ροής γύρω από πτερύγιο και ειδικότερα του φαινομένου δημιουργίας διαφοράς πίεσης μεταξύ των δύο όψεων του πτερυγίου. Να σημειωθεί ότι η χρήση προσδεδεμένης στροβιλότητας δε μπορεί να προσομοιάσει φαινόμενα που σχετίζονται με το πάχος του πτερυγίου. Για την προσομοίωση του πάχους απαιτείται επιπρόσθετη κατανομή πηγών πάνω στο πτερύγιο. Τέλος στο σχήμα 3ε φαίνεται η ανάπτυξη ‘δευτερεύουσας ροής’ στο ακροπτερύγιο επακόλουθο της οποίας είναι ο μηδενισμός της φόρτισης (διαφοράς πίεσης – άνωσης) στην περιοχή αυτή. Η φυσική αυτή παρατήρηση χρησιμοποιείται στα επόμενα για τον καθορισμό των οριακών συνθηκών της προσδεδεμένης στροβιλότητας στα πλαίσια της ανάπτυξης της θεωρίας φέρουσας γραμμής για πτερύγιο.
Σχήμα 3α. Σύστημα προσδεδεμένων και ακολουθούντων δινών για την προσομοίωση της
ροής γύρω από πτερύγιο
6
Σχήμα 3β. Δίνη εκκίνησης για την προσομοίωση της ροής γύρω από πτερύγιο
Σχήμα 3γ. Το ακολουθούν φύλλο στροβιλότητας (ακολουθούσες δίνες) σαν αποτέλεσμα του οριακού στρώματος του πτερυγίου.
7
Σχήμα 3δ. Λεπτομέρειες της ροής στην όψη υποπίεσης υδροτομής.
8
Σχήμα 3ε. Δευτερεύουσα ροή’ στο ακροπτερύγιο. 3. ‘Ευρηματική’ εισαγωγή στη θεωρία φέρουσας γραμμής για πτερύγια. Προαπαιτούμενα για μια αυστηρή εισαγωγή στην θεωρία φέρουσας γραμμής Lanchester - Prandtl Η χρήση συστήματος ‘πεταλοειδών δινών’ (horseshow vortices) για την αναπαράσταση τόσο της (αναμενόμενης) διαφοράς πίεσης στις δύο όψεις της πτέρυγας όσο και της (αναμενόμενης - Helmholtz) ελεύθερης στροβιλότητας στον ομόρρου της πτέρυγας είναι από τα πρώτα επιτυχημένα μαθηματικά μοντέλα που χρησιμοποιήθηκαν. Στο σχήμα 3α.a φαίνεται το σύστημα πεταλοειδών δινών που χρησιμοποιείται για την προσομοίωση της ροής γύρω από τρισδιάστατη πτέρυγα. Ειδικότερα κάθε πεταλοειδής δίνη έχει ένα ‘προσδεδεμένο’ κομμάτι και ένα ‘ακολουθούν’ κομμάτι. Το σύστημα των προσδεδεμένων δινών αποτελείται από μεγάλο αριθμό δινών κατά τη διεύθυνση του ανοίγματος του πτερυγίου. Η συνέχεια της στροβιλότητας ικανοποιείται ταυτοτικά αφού κάθε προσδεδεμένη δίνη, ως τμήμα μιας πεταλοειδούς δίνης, είναι αναγκασμένη σε κάποια θέση να στραφεί προς τα πίσω (δηλαδή κατά τη διεύθυνση της ροής) και να εξέλθει από το χείλος εκφυγής στο ομόρρου. Μία περαιτέρω εξιδανίκευση της ροής γύρω από πτερύγιο φαίνεται στο σχήμα 3α.b, όπου το πτερύγιο αντικαθίσταται από μία και μοναδική πεταλοειδή δίνη συνολικής έντασης Γ. Η ένταση αυτή είναι ίση με την ένταση του σωλήνα στροβιλότητας στο μέσον του πτερυγίου του σχήματος 3α.a. Η θεωρία φέρουσας γραμμής των Lanchester – Prandtl προέκυψε από περαιτέρω επεξεργασία και βελτίωση της τελευταίας ιδέας. Εξετάζοντας κριτικά την τελευταία ιδέα παρατηρούμε ότι είναι τόσο σωστότερη όσο ο λόγος της χορδής του πτερυγίου προς το άνοιγμα του τείνει στο μηδέν!! Πχ ένα πτερύγιο ανεμομύλου έχει λόγο χορδής προς άνοιγμα πολύ μικρότερο από τον αντίστοιχο σε μια πτέρυγα αεροπλάνου και πολύ
9
μικρότερο από τον αντίστοιχο πτερυγίου έλικας πλοίου. Η θεωρία ‘φέρουσας γραμμής’ μπορεί να προκύψει με εντελώς αυστηρό μαθηματικά τρόπο αν γράψουμε τις ακριβείς εξισώσεις που διέπουν το πρόβλημα της ροής γύρω από τρισδιάστατη πτέρυγα [5] και στη συνέχεια το επεξεργαστούμε με ασυμπτοτικές μεθόδους στα πλαίσια της ‘θεωρίας διαταραχών’ (perturbation theory) [3]. Το μαθηματικό πρόβλημα διαταρ πο
προκύπτει είναι ιδιόμορφο (singular perturbation problem), διότι
αχών υ
στο όριο 0cs
→ ( :c
χορδή, :s άνοιγμα) με σταθερό s , χάνονται οι λεπτομέρειες της γεωμετρίας του πτερυγίου. Για την ανάκτηση της πληροφορίας που αφορά την γεωμετρία του πτε
είμαστε αναγκασμένοι να και ένα δεύτερο ασυμτοτικό πρόβλημα, όπου
ρυγ
εισάγουμε
ίου
0c
ροβλή
« » (
s→
με :c σταθερό, οπότε ∞ . Προκύπτουν λοιπόν δύο ξεχωριστά π ματα ένα
– outer
s →
εξωτερικό 0cs
→ , σταθερό s ) και ένα «εσωτερικό – inner» ( 0cs
→ ,
σταθερό c ). Κάθε ένα από τα δύο είναι ελλιπές, αφού τμήμα της πληροφορίας του αρχικού προβλήματος έχει εκφυλιστεί (και τελικά χαθεί) από την οριακή διαδικασία. Συνεπώς απαιτείται μια «σχέση συναρμογής – matching relation» μεταξύ εξωτερικού και
παραίτητη για την παραγωγή της λοκληροδιαφορικής εξίσωσης της φέρουσας γραμμής.
οια της επαγόμενης ταχύτητας (νόμος των Biot-
ί να αναπαρασταθεί μονοσήμαντα από το ακόλουθο ‘θεώρημα αναπαράστασης’[5]:
εσωτερικού προβλήματος για να υπάρξει μονοσήμαντη λύση. ‘Μεταφράζοντας’ τα ‘πρωτοτάξια’ αποτελέσματα της ασυμπτωτικής θεώρησης από τη μαθηματική γλώσσα σε συνήθη γλώσσα μπορούμε να πούμε ότι το εξωτερικό πρόβλημα αφορά παρατηρητή ‘μακριά’ από το πτερύγιο ο οποίος ‘δεν βλέπει’ τις λεπτομέρειες της ροής γύρω από αυτό αλλά το ‘μέσο αποτέλεσμα’ της επίδρασης της προσδεδεμένης και ακολουθούσης στροβιλότητας στην περιοχή της πτέρυγας! Για ένα τέτοιο παρατηρητή (και εφόσον η πτέρυγα έχει μικρό λόγο χορδής/άνοιγμα) η προσδεδεμένη στροβιλότητα του πτερυγίου φαίνεται συγκεντρωμένη σε μια γραμμή -φέρουσα γραμμή (lifting line)- με μεταβλητή ένταση κυκλοφορίας Γ(y), σχήμα 6α. Αντιθέτως το εσωτερικό πρόβλημα αφορά παρατηρητή ‘προσδεδεμένο’ σε μια πτερυγοτομή στην πτέρυγα που ‘βλέπει μόνο την πολύ κοντινή σε αυτόν ροή’. Ο παρατηρητής αυτός θεωρεί ότι η ροή γύρω από την πτερυγοτομή είναι δυσδιάστατη αλλά με ‘τροποποιημένη επ’ άπειρο ταχύτητα’ από τρισδιάστατα φαινόμενα όπως μοντελοποιούνται από το ‘εξωτερικό πρόβλημα’. Οι εξισώσεις της θεωρίας φέρουσας γραμμής παράγονται από ‘συναρμογή’ των δύο διαφορετικών θεωρήσεων (εσωτερική – εξωτερική). Στα σχήματα 7 και 8 φαίνεται σχηματικά η ‘συναρμογή’. Τέλος στην παράγραφο 8.1 συζητείται η σχέση συναρμογής του εσωτερικού με το εξωτερικό πρόβλημα που είναι αο 4. Η ένν
avart) S Σύμφωνα με το θεμελιώδες θεώρημα της διανυσματικής ανάλυσης, ένα τυχαίο
διανυσματικό πεδίο →
V μπορε
dSrrVn
rrnVdV
rrVrot
rrVdivV
SV
p ∫∫ ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛××+⋅+
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛×+−=
→→→
→→→
→→
→→→
3333 )()(4π (2)
10
αν είναι γνωστή η απόκλισή του ( ), η περιστροφή του ( ) στον όγκο V και η τιμή του στην επιφάνεια S (σύνορο του όγκου V).
→
Vdiv→
Vrot
Εφαρμόζοντας το θεώρημα αναπαράστασης για την περίπτωση τρισδιάστατης γραμμής δίνης, παράγεται η ακόλουθη σχέση (οι λεπτομέρειες της παραγωγής παραλείπονται):
dlrrnV
L
p ∫ ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛×
Γ−=
→→→
34π (3)
όπου L το ίχνος (γεωμετρικό) της τρισδιάστατης γραμμής δίνης, Γ η ένταση της δίνης
(κυκλοφορία) και διάνυσμα μοναδιαίο εφαπτόμενο στη γραμμή δίνης. Σύμφωνα με την τελευταία σχέση, η ύπαρξη γραμμής δίνης φαίνεται ότι «επάγει» πεδίο ταχύτητας που δίνεται από το αντίστοιχο επικαμπύλιο ολοκλήρωμα. Η σχέση (3) ονομάζεται και νόμος των Biot-Savart από αντίστοιχη σχέση που ισχύει μεταξύ ηλεκτρικού ρεύματος σε αγωγό και επαγόμενου μαγνητικού πεδίου, που ισχύει στον ηλεκτρομαγνητισμό.
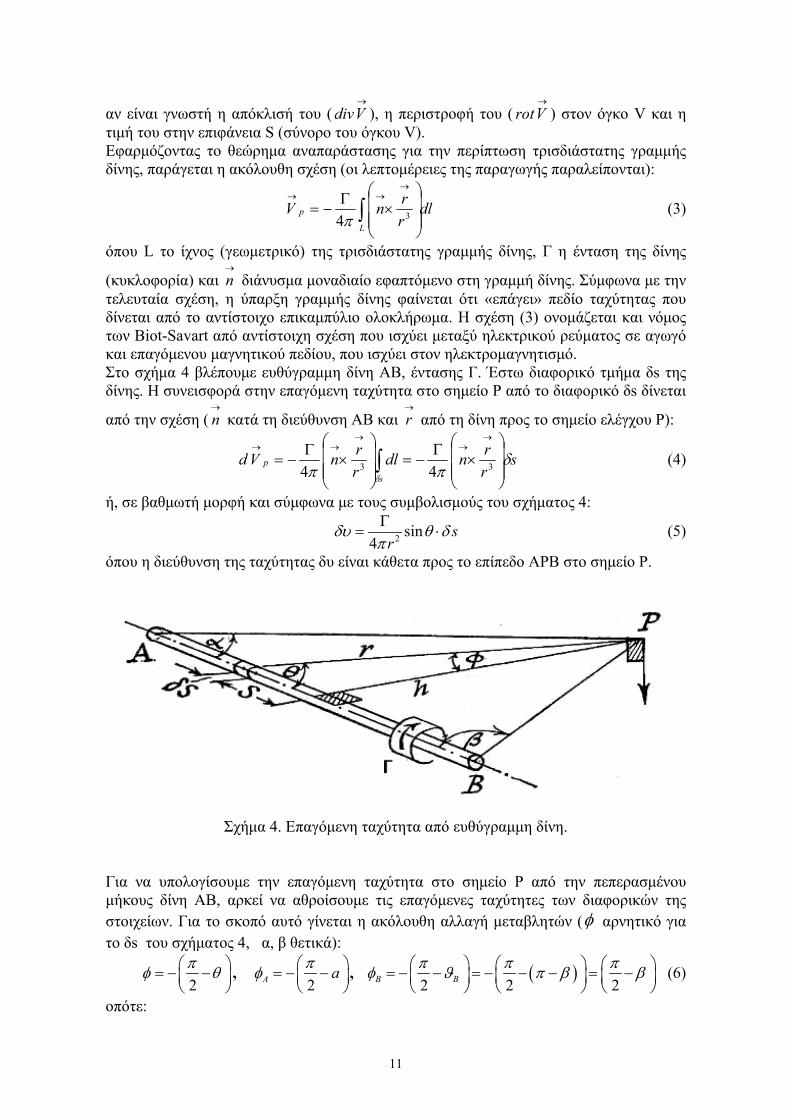
→
n
Στο σχήμα 4 βλέπουμε ευθύγραμμη δίνη ΑΒ, έντασης Γ. Έστω διαφορικό τμήμα δs της δίνης. Η συνεισφορά στην επαγόμενη ταχύτητα στο σημείο P από το διαφορικό δs δίνεται
από την σχέση ( κατά τη διεύθυνση ΑΒ και από τη δίνη προς το σημείο ελέγχου P): n→
r→
srrndl
rrnVd
s
p δππ δ ⎟⎟
⎟
⎠
⎞
⎜⎜⎜
⎝
⎛×
Γ−=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛×
Γ−=
→→
→→→
∫ 33 44 (4)
ή, σε βαθμωτή μορφή και σύμφωνα με τους συμβολισμούς του σχήματος 4:
2 sin4
sr
δυπ
θ δΓ= ⋅ (5)
όπου η διεύθυνση της ταχύτητας δυ είναι κάθετα προς το επίπεδο APB στο σημείο P.
Σχήμα 4. Επαγόμενη ταχύτητα από ευθύγραμμη δίνη. Για να υπολογίσουμε την επαγόμενη ταχύτητα στο σημείο P από την πεπερασμένου μήκους δίνη ΑΒ, αρκεί να αθροίσουμε τις επαγόμενες ταχύτητες των διαφορικών της στοιχείων. Για το σκοπό αυτό γίνεται η ακόλουθη αλλαγή μεταβλητών (φ αρνητικό για το δs του σχήματος 4, α, β θετικά):
2πφ θ⎛ ⎞= − −⎜ ⎟
⎝ ⎠,
2A aπφ ⎛ ⎞= − −⎜ ⎟⎝ ⎠
, ( )2 2 2B Bπ π πφ ϑ π β⎛ ⎞ ⎛ ⎞ ⎛= − − = − − − = −⎜ ⎟ ⎜ ⎟ ⎜
⎝ ⎠ ⎝ ⎠ ⎝β ⎞
⎟⎠
(6)
οπότε:
11

φθ cossin = , 2 2 2/ sin secr h r hϑ φ= ⇒ = (7α) ( ) φφφ dhhdds sectan 2== (7β)
Αντικαθιστώντας τις σχέσεις (6) και (7) στην (5) και ολοκληρώνοντας από Α ως Β, έχουμε:
2
2
cos sin sin4 4 2 2
dh h
π β
π α
π πυ φ φ β απ π
⎛ ⎞+ −⎜ ⎟⎝ ⎠
⎛ ⎞− −⎜ ⎟⎝ ⎠
Γ Γ ⎡ ⎛ ⎞ ⎛= = − +⎜ ⎟ ⎜⎤⎞− ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠⎣ ⎦
∫ (8)
ή (cos cos4 h
)υ απ
βΓ= + (9)
Η σχέση (9) θα χρησιμοποιηθεί στη συνέχεια για την παραγωγή της επαγόμενης ταχύτητας από πεταλοειδή δίνη. Η πεταλοειδής δίνη μπορεί να θεωρηθεί ότι συνίσταται από μία ευθύγραμμη δίνη ΑΒ και δύο ημιάπειρες δίνες που ξεκινούν από τα άκρα της. Εφαρμοζόμενη η σχέση (9) για ημιάπειρη δίνη (σχήμα 5a) δίνει:
(cos 14 h
υ απΓ
= )+ (10)
Στην περίπτωση που το σημείο P υπολογισμού της ταχύτητας (σημείο ελέγχου – control point) βρεθεί στο επίπεδο το κάθετο στη δίνη στο σημείο Α (σχήμα 5b), η σχέση (10) γίνεται:
4 hυ
πΓ
= (11)
Τέλος στην περίπτωση που η δίνη εκτείνεται στο άπειρο και από τις δύο πλευρές (σχήμα 5c) η σχέση (10) γίνεται:
2 hυ
πΓ
= (12)
12
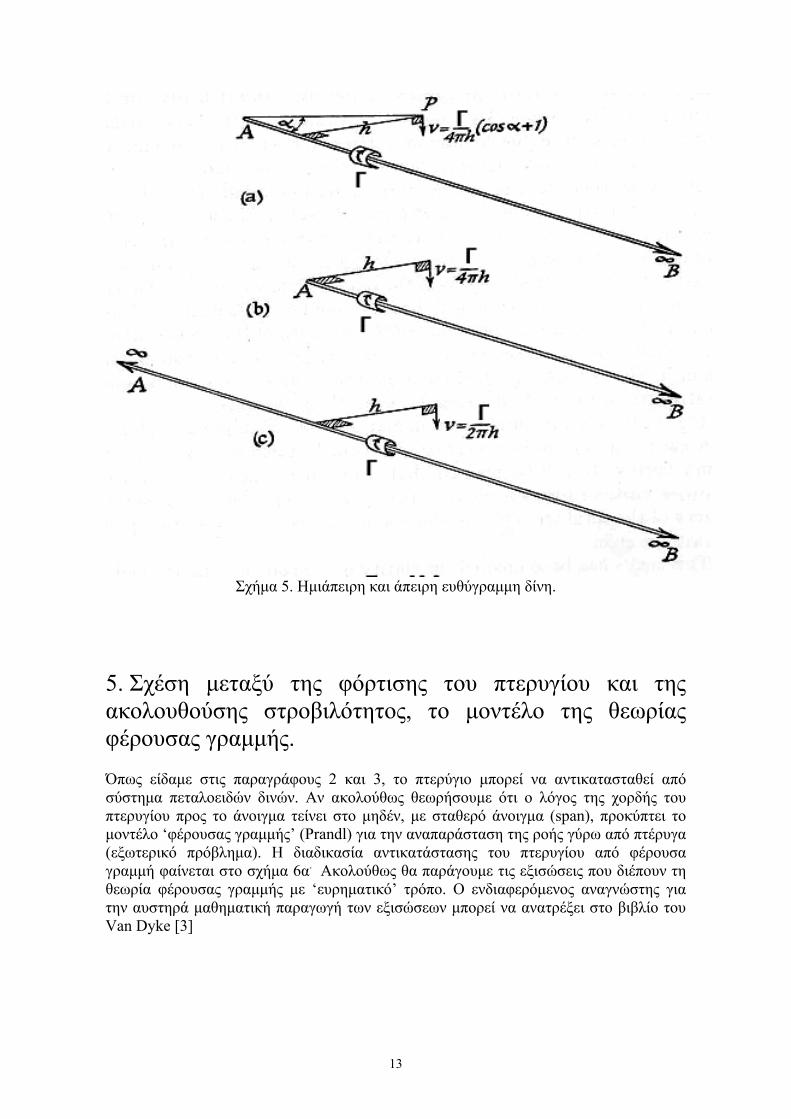
Σχήμα 5. Ημιάπειρη και άπειρη ευθύγραμμη δίνη.
5. Σχέση μεταξύ της φόρτισης του πτερυγίου και της ακολουθούσης στροβιλότητος, το μοντέλο της θεωρίας φέρουσας γραμμής. Όπως είδαμε στις παραγράφους 2 και 3, το πτερύγιο μπορεί να αντικατασταθεί από σύστημα πεταλοειδών δινών. Αν ακολούθως θεωρήσουμε ότι ο λόγος της χορδής του πτερυγίου προς το άνοιγμα τείνει στο μηδέν, με σταθερό άνοιγμα (span), προκύπτει το μοντέλο ‘φέρουσας γραμμής’ (Prandl) για την αναπαράσταση της ροής γύρω από πτέρυγα (εξωτερικό πρόβλημα). Η διαδικασία αντικατάστασης του πτερυγίου από φέρουσα γραμμή φαίνεται στο σχήμα 6α. Ακολούθως θα παράγουμε τις εξισώσεις που διέπουν τη θεωρία φέρουσας γραμμής με ‘ευρηματικό’ τρόπο. Ο ενδιαφερόμενος αναγνώστης για την αυστηρά μαθηματική παραγωγή των εξισώσεων μπορεί να ανατρέξει στο βιβλίο του Van Dyke [3]
13
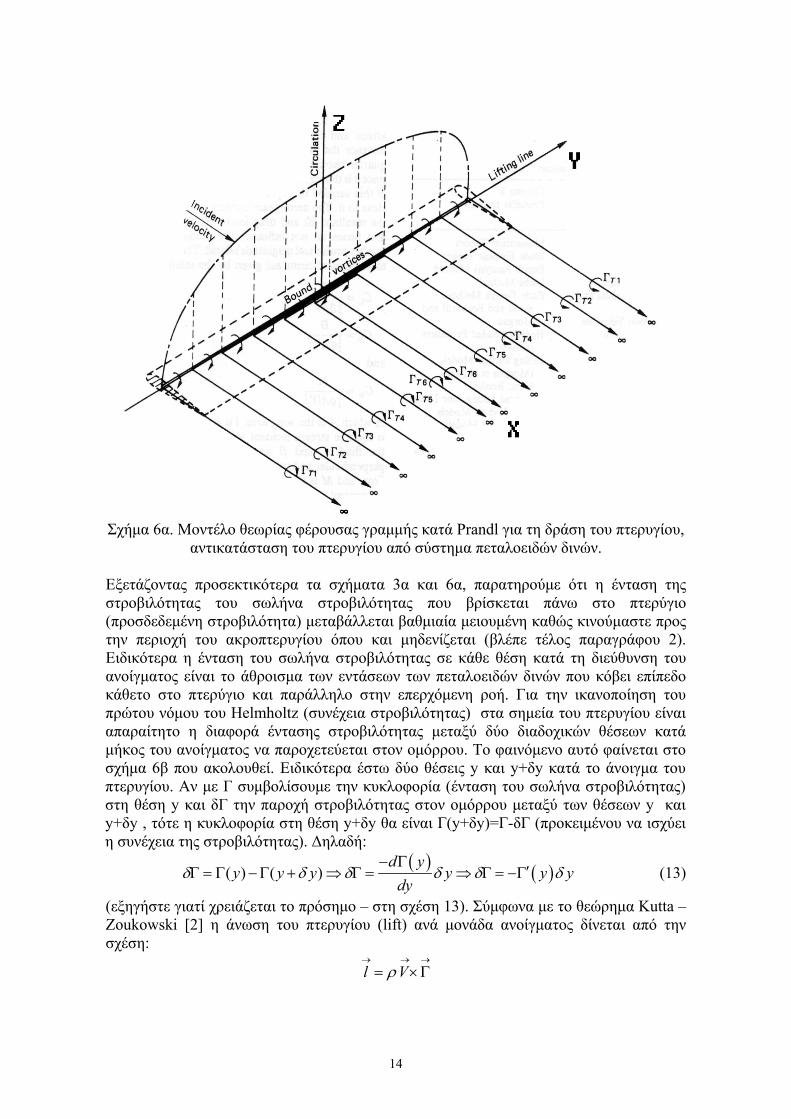
Σχήμα 6α. Μοντέλο θεωρίας φέρουσας γραμμής κατά Prandl για τη δράση του πτερυγίου,
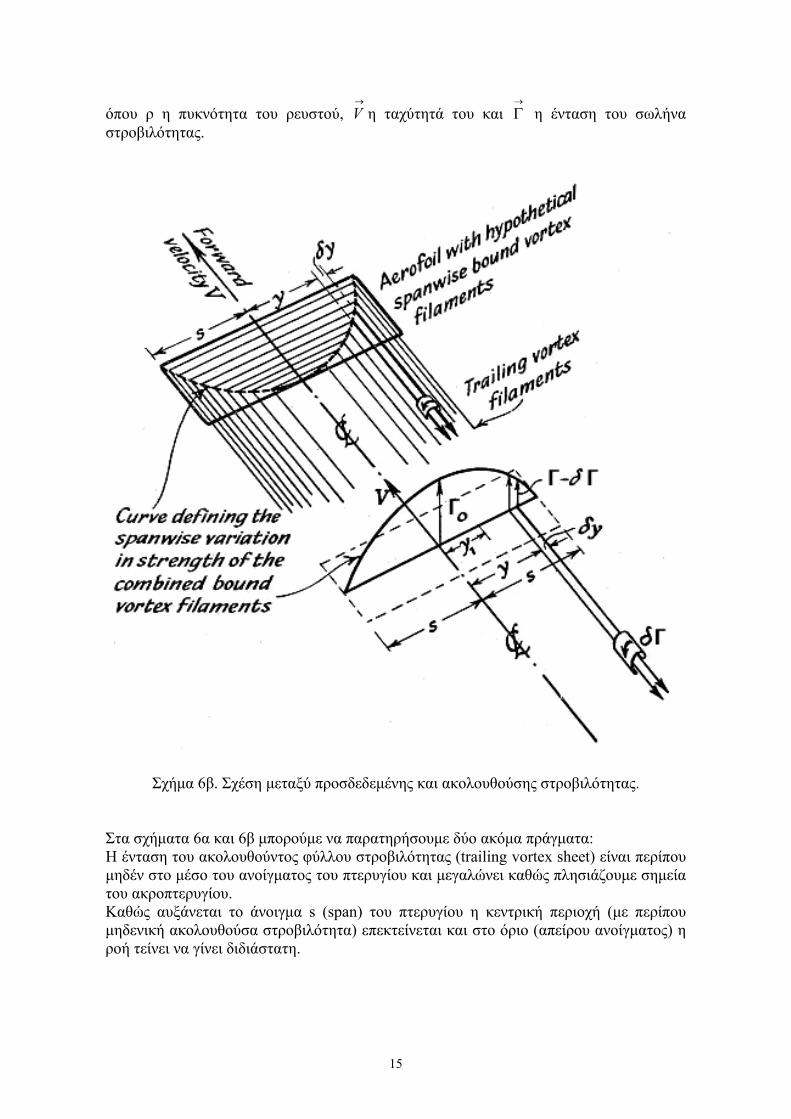
αντικατάσταση του πτερυγίου από σύστημα πεταλοειδών δινών. Εξετάζοντας προσεκτικότερα τα σχήματα 3α και 6α, παρατηρούμε ότι η ένταση της στροβιλότητας του σωλήνα στροβιλότητας που βρίσκεται πάνω στο πτερύγιο (προσδεδεμένη στροβιλότητα) μεταβάλλεται βαθμιαία μειουμένη καθώς κινούμαστε προς την περιοχή του ακροπτερυγίου όπου και μηδενίζεται (βλέπε τέλος παραγράφου 2). Ειδικότερα η ένταση του σωλήνα στροβιλότητας σε κάθε θέση κατά τη διεύθυνση του ανοίγματος είναι το άθροισμα των εντάσεων των πεταλοειδών δινών που κόβει επίπεδο κάθετο στο πτερύγιο και παράλληλο στην επερχόμενη ροή. Για την ικανοποίηση του πρώτου νόμου του Helmholtz (συνέχεια στροβιλότητας) στα σημεία του πτερυγίου είναι απαραίτητο η διαφορά έντασης στροβιλότητας μεταξύ δύο διαδοχικών θέσεων κατά μήκος του ανοίγματος να παροχετεύεται στον ομόρρου. Το φαινόμενο αυτό φαίνεται στο σχήμα 6β που ακολουθεί. Ειδικότερα έστω δύο θέσεις y και y+δy κατά το άνοιγμα του πτερυγίου. Αν με Γ συμβολίσουμε την κυκλοφορία (ένταση του σωλήνα στροβιλότητας) στη θέση y και δΓ την παροχή στροβιλότητας στον ομόρρου μεταξύ των θέσεων y και y+δy , τότε η κυκλοφορία στη θέση y+δy θα είναι Γ(y+δy)=Γ-δΓ (προκειμένου να ισχύει η συνέχεια της στροβιλότητας). Δηλαδή:
( ) ( )( ) ( )d y
y y y y ydy
yδ δ δ δ δ δ− Γ
′Γ = Γ − Γ + ⇒ Γ = ⇒ Γ = −Γ (13)
(εξηγήστε γιατί χρειάζεται το πρόσημο – στη σχέση 13). Σύμφωνα με το θεώρημα Kutta – Ζoukowski [2] η άνωση του πτερυγίου (lift) ανά μονάδα ανοίγματος δίνεται από την σχέση:
l Vρ→ → →
= ×Γ
14
όπου ρ η πυκνότητα του ρευστού, η ταχύτητά του και →
V→
Γ η ένταση του σωλήνα στροβιλότητας.
Σχήμα 6β. Σχέση μεταξύ προσδεδεμένης και ακολουθούσης στροβιλότητας. Στα σχήματα 6α και 6β μπορούμε να παρατηρήσουμε δύο ακόμα πράγματα: Η ένταση του ακολουθούντος φύλλου στροβιλότητας (trailing vortex sheet) είναι περίπου μηδέν στο μέσο του ανοίγματος του πτερυγίου και μεγαλώνει καθώς πλησιάζουμε σημεία του ακροπτερυγίου. Καθώς αυξάνεται το άνοιγμα s (span) του πτερυγίου η κεντρική περιοχή (με περίπου μηδενική ακολουθούσα στροβιλότητα) επεκτείνεται και στο όριο (απείρου ανοίγματος) η ροή τείνει να γίνει διδιάστατη.
15
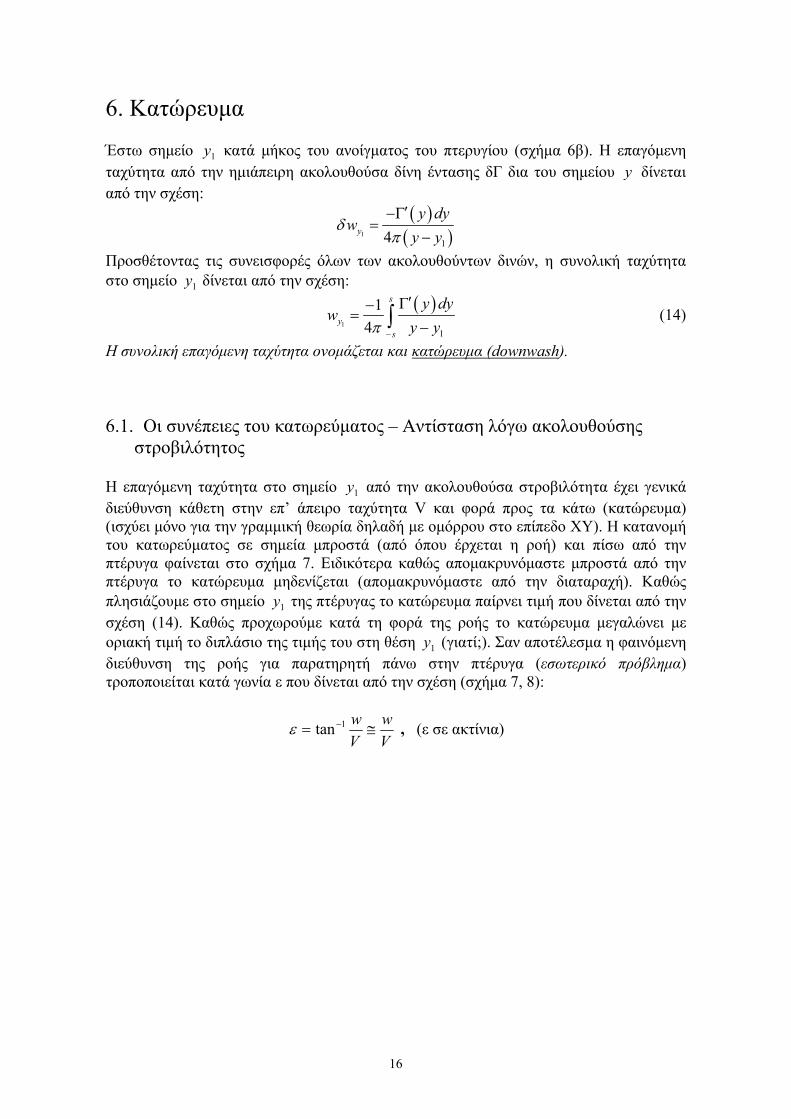
6. Κατώρευμα Έστω σημείο κατά μήκος του ανοίγματος του πτερυγίου (σχήμα 6β). Η επαγόμενη ταχύτητα από την ημιάπειρη ακολουθούσα δίνη έντασης δΓ δια του σημείου
1yy δίνεται
από την σχέση: ( )
( )114y
y dyw
y yδ
π′−Γ
=−
Προσθέτοντας τις συνεισφορές όλων των ακολουθούντων δινών, η συνολική ταχύτητα στο σημείο δίνεται από την σχέση: 1y
( )1
1
14
s
ys
y dyw
y yπ −
′Γ−=
−∫ (14)
Η συνολική επαγόμενη ταχύτητα ονομάζεται και κατώρευμα (downwash). 6.1. Οι συνέπειες του κατωρεύματος – Αντίσταση λόγω ακολουθούσης
στροβιλότητος Η επαγόμενη ταχύτητα στο σημείο από την ακολουθούσα στροβιλότητα έχει γενικά διεύθυνση κάθετη στην επ’ άπειρο ταχύτητα V και φορά προς τα κάτω (κατώρευμα) (ισχύει μόνο για την γραμμική θεωρία δηλαδή με ομόρρου στο επίπεδο ΧΥ). Η κατανομή του κατωρεύματος σε σημεία μπροστά (από όπου έρχεται η ροή) και πίσω από την πτέρυγα φαίνεται στο σχήμα 7. Ειδικότερα καθώς απομακρυνόμαστε μπροστά από την πτέρυγα το κατώρευμα μηδενίζεται (απομακρυνόμαστε από την διαταραχή). Καθώς πλησιάζουμε στο σημείο της πτέρυγας το κατώρευμα παίρνει τιμή που δίνεται από την σχέση (14). Καθώς προχωρούμε κατά τη φορά της ροής το κατώρευμα μεγαλώνει με οριακή τιμή το διπλάσιο της τιμής του στη θέση (γιατί;). Σαν αποτέλεσμα η φαινόμενη διεύθυνση της ροής για παρατηρητή πάνω στην πτέρυγα (εσωτερικό πρόβλημα) τροποποιείται κατά γωνία ε που δίνεται από την σχέση (σχήμα 7, 8):
1y
1y
1y
Vw
Vw
≅= −1tanε , (ε σε ακτίνια)
16
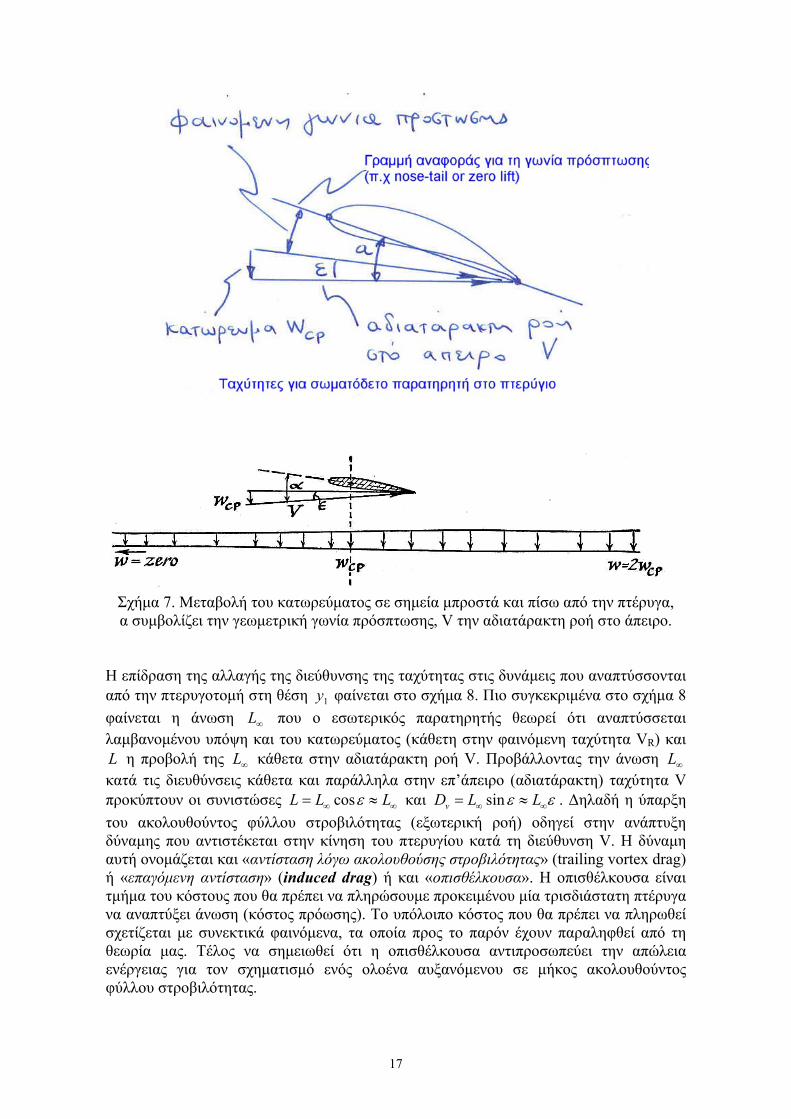
Σχήμα 7. Μεταβολή του κατωρεύματος σε σημεία μπροστά και πίσω από την πτέρυγα, α συμβολίζει την γεωμετρική γωνία πρόσπτωσης, V την αδιατάρακτη ροή στο άπειρο.
Η επίδραση της αλλαγής της διεύθυνσης της ταχύτητας στις δυνάμεις που αναπτύσσονται από την πτερυγοτομή στη θέση φαίνεται στο σχήμα 8. Πιο συγκεκριμένα στο σχήμα 8 φαίνεται η άνωση που ο εσωτερικός παρατηρητής θεωρεί ότι αναπτύσσεται λαμβανομένου υπόψη και του κατωρεύματος (κάθετη στην φαινόμενη ταχύτητα VR) και
η προβολή της κάθετα στην αδιατάρακτη ροή V. Προβάλλοντας την άνωση κατά τις διευθύνσεις κάθετα και παράλληλα στην επ’άπειρο (αδιατάρακτη) ταχύτητα V προκύπτουν οι συνιστώσες
1y
L L
∞L
∞L L ∞L
cos Lε∞ ∞= ≈ και sinvD L Lε ε∞ ∞= ≈ . Δηλαδή η ύπαρξη του ακολουθούντος φύλλου στροβιλότητας (εξωτερική ροή) οδηγεί στην ανάπτυξη δύναμης που αντιστέκεται στην κίνηση του πτερυγίου κατά τη διεύθυνση V. Η δύναμη αυτή ονομάζεται και «αντίσταση λόγω ακολουθούσης στροβιλότητας» (trailing vortex drag) ή «επαγόμενη αντίσταση» (induced drag) ή και «οπισθέλκουσα». Η οπισθέλκουσα είναι τμήμα του κόστους που θα πρέπει να πληρώσουμε προκειμένου μία τρισδιάστατη πτέρυγα να αναπτύξει άνωση (κόστος πρόωσης). Το υπόλοιπο κόστος που θα πρέπει να πληρωθεί σχετίζεται με συνεκτικά φαινόμενα, τα οποία προς το παρόν έχουν παραληφθεί από τη θεωρία μας. Τέλος να σημειωθεί ότι η οπισθέλκουσα αντιπροσωπεύει την απώλεια ενέργειας για τον σχηματισμό ενός ολοένα αυξανόμενου σε μήκος ακολουθούντος φύλλου στροβιλότητας.
17
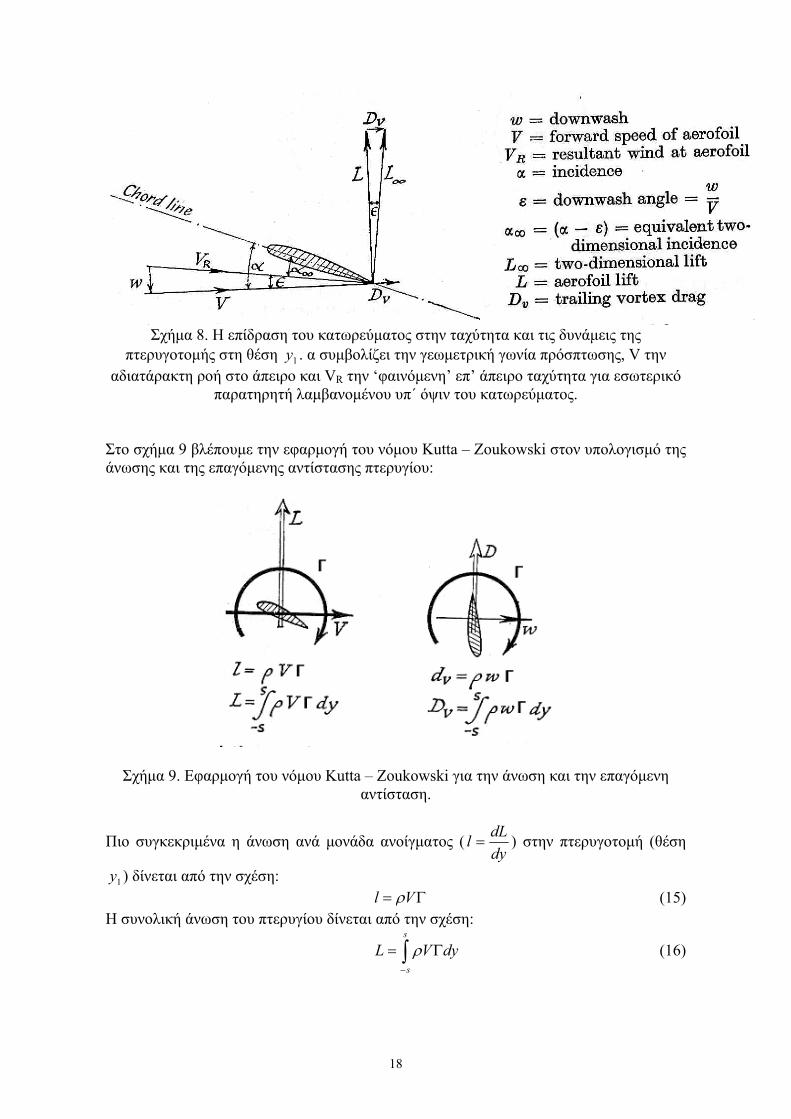
Σχήμα 8. Η επίδραση του κατωρεύματος στην ταχύτητα και τις δυνάμεις της
πτερυγοτομής στη θέση . α συμβολίζει την γεωμετρική γωνία πρόσπτωσης, V την αδιατάρακτη ροή στο άπειρο και VR την ‘φαινόμενη’ επ’ άπειρο ταχύτητα για εσωτερικό
παρατηρητή λαμβανομένου υπ΄ όψιν του κατωρεύματος.
1y
Στο σχήμα 9 βλέπουμε την εφαρμογή του νόμου Kutta – Zoukowski στον υπολογισμό της άνωσης και της επαγόμενης αντίστασης πτερυγίου:
Σχήμα 9. Εφαρμογή του νόμου Kutta – Zoukowski για την άνωση και την επαγόμενη αντίσταση.
Πιο συγκεκριμένα η άνωση ανά μονάδα ανοίγματος (dydLl = ) στην πτερυγοτομή (θέση
) δίνεται από την σχέση: 1yl Vρ= Γ (15)
Η συνολική άνωση του πτερυγίου δίνεται από την σχέση: s
s
L Vρ−
dy= Γ∫ (16)
18
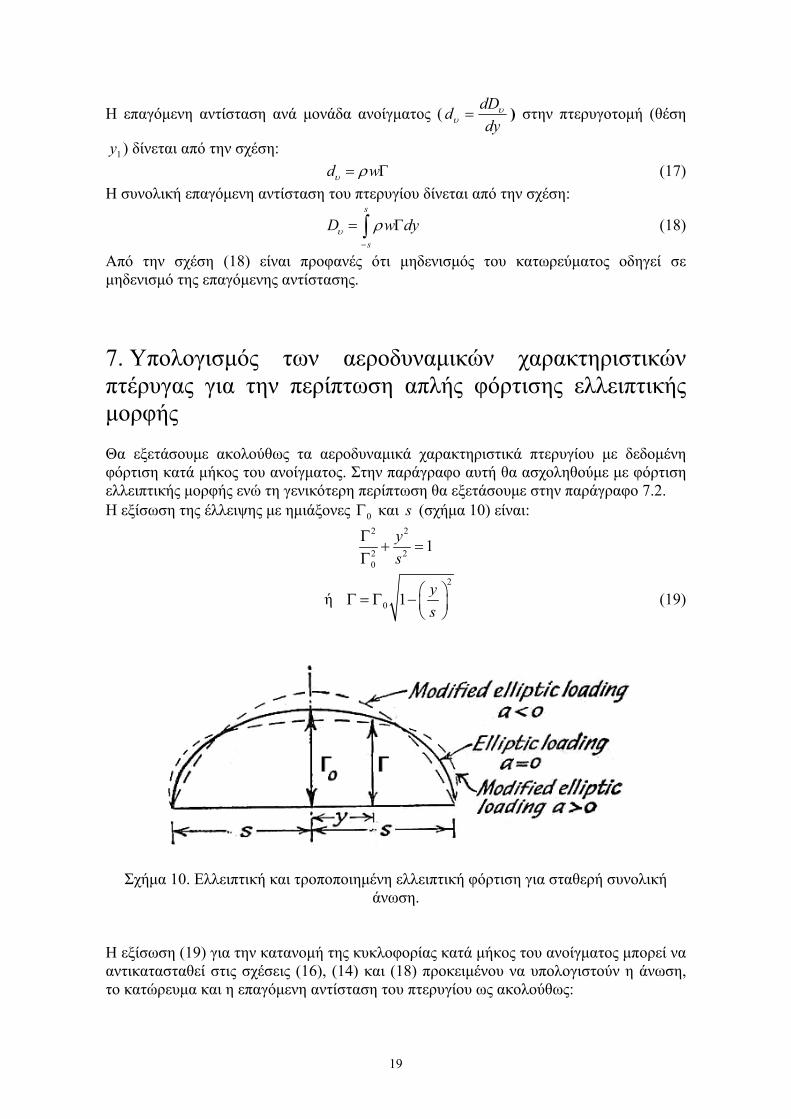
Η επαγόμενη αντίσταση ανά μονάδα ανοίγματος (dy
dDd υυ = ) στην πτερυγοτομή (θέση
) δίνεται από την σχέση: 1yd wυ ρ= Γ (17)
Η συνολική επαγόμενη αντίσταση του πτερυγίου δίνεται από την σχέση: s
s
D wυ ρ−
dy= Γ∫ (18)
Από την σχέση (18) είναι προφανές ότι μηδενισμός του κατωρεύματος οδηγεί σε μηδενισμό της επαγόμενης αντίστασης. 7. Υπολογισμός των αεροδυναμικών χαρακτηριστικών πτέρυγας για την περίπτωση απλής φόρτισης ελλειπτικής μορφής Θα εξετάσουμε ακολούθως τα αεροδυναμικά χαρακτηριστικά πτερυγίου με δεδομένη φόρτιση κατά μήκος του ανοίγματος. Στην παράγραφο αυτή θα ασχοληθούμε με φόρτιση ελλειπτικής μορφής ενώ τη γενικότερη περίπτωση θα εξετάσουμε στην παράγραφο 7.2. Η εξίσωση της έλλειψης με ημιάξονες 0Γ και (σχήμα 10) είναι: s
2 2
2 20
1ys
Γ+ =
Γ
ή 2
0 1 ys
⎛ ⎞Γ = Γ − ⎜ ⎟⎝ ⎠
(19)
Σχήμα 10. Ελλειπτική και τροποποιημένη ελλειπτική φόρτιση για σταθερή συνολική άνωση.
Η εξίσωση (19) για την κατανομή της κυκλοφορίας κατά μήκος του ανοίγματος μπορεί να αντικατασταθεί στις σχέσεις (16), (14) και (18) προκειμένου να υπολογιστούν η άνωση, το κατώρευμα και η επαγόμενη αντίσταση του πτερυγίου ως ακολούθως:
19
Ανωση (ελλειπτική κατανομή φόρτισης): 2
0 1s s
s s
yL V dy V dys
ρ ρ− −
⎛ ⎞= Γ = Γ − ⇒⎜ ⎟⎝ ⎠∫ ∫ 0 2
sL Vρ π= Γ (20)
Ως εκ τούτου:
0 1
2
L
V sρ πΓ =
ή εισάγοντας τον συντελεστή άνωσης : LC SVCL L2
21 ρ= (σχέση ορισμού για το , S:
εμβαδόν επιφάνειας πτερυγίου ), οπότε η σχέση (20 γίνεται:
LC
0LC VS
sπΓ = (21)
Η σχέση (21) δίνει την κυκλοφορία στο μέσον του ανοίγματος του πτερυγίου (μοναδική παράμετρος καθορισμού της κατανομής της κυκλοφορίας στη σχέση (19)) συναρτήσει του συνολικού συντελεστή άνωσης του πτερυγίου και των γεωμετρικών παραμέτρων s (ημιάνοιγμα πτερυγίου) και S (εμβαδόν επιφάνειας πτερυγίου). Κατώρευμα (ελλειπτική κατανομή φόρτισης): Παραγωγίζοντας την σχέση (19) έχουμε:
12 2
00 2 2 2
1d y y ydy s s s s y
−⎡ ⎤ ΓΓ ⎛ ⎞= −Γ − = −⎢ ⎥⎜ ⎟
⎝ ⎠ −⎢ ⎥⎣ ⎦
Αντικαθιστώντας στην σχέση (14) έχουμε:
( )1
02 2
14
s
ys
ydyws s y y yπ −
Γ=
− −∫
Προσθέτοντας το 11 yy − στον αριθμητή έχουμε:
( )( ) ( )1
1 10 012 2 2 2 2 2
1 14 4
s s s
ys s s
y y y dy dyw dy ys ss y y y s y s y y yπ π− − −
⎡ ⎤− +Γ Γ⎢ ⎥= = +⎢ ⎥− − − − −⎣ ⎦
∫ ∫ ∫
Υπολογίζοντας το πρώτο ολοκλήρωμα του τρίτου μέλους και συμβολίζοντας με Ι το δεύτερο ολοκλήρωμα του τρίτου μέλους έχουμε:
[1
014yw
sπ
π]y IΓ
= + (22)
Όπως μπορεί να αποδειχθεί χρησιμοποιώντας μιγαδικές συναρτήσεις και το θεώρημα των υπολοίπων (residue theorem), το ολοκλήρωμα 0=I . Ως εκ τούτου η σχέση για το κατώρευμα γίνεται:
0
4w
sΓ
= (23)
Δηλαδή στην περίπτωση της ελλειπτικής φόρτισης το κατώρευμα είναι σταθερό σε κάθε σημείο κατά μήκος του ανοίγματος της πτέρυγας. 1y Επαγόμενη αντίσταση ελλειπτικής κατανομής φόρτισης Αντικαθιστώντας την εξίσωση (23) στην εξίσωση (18) παράγεται η ακόλουθη σχέση για την επαγόμενη αντίσταση:
20
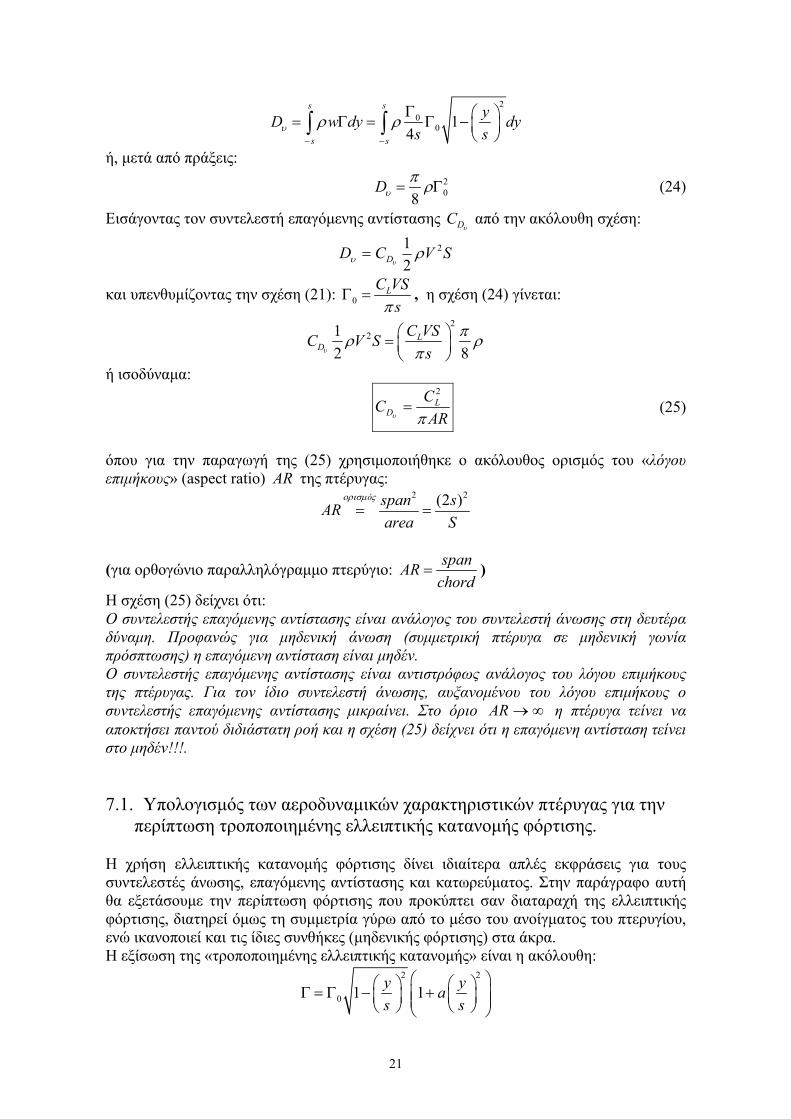
20
0 14
s s
s s
yD w dy dys sυ ρ ρ
− −
Γ ⎛ ⎞= Γ = Γ − ⎜ ⎟⎝ ⎠∫ ∫
ή, μετά από πράξεις: 208
Dυπ ρ= Γ (24)
Εισάγοντας τον συντελεστή επαγόμενης αντίστασης από την ακόλουθη σχέση: υDC
SVCD D2
21 ρ
υυ =
και υπενθυμίζοντας την σχέση (21): 0LC VS
sπΓ = , η σχέση (24) γίνεται:
221
2 8L
DC VSC V S
sυ
πρ ρπ
⎛ ⎞= ⎜ ⎟⎝ ⎠
ή ισοδύναμα:
ARCC L
D πυ
2
= (25)
όπου για την παραγωγή της (25) χρησιμοποιήθηκε ο ακόλουθος ορισμός του «λόγου επιμήκους» (aspect ratio) της πτέρυγας: AR
2 2(2 )ό span sARarea S
ορισμ ς
= =
(για ορθογώνιο παραλληλόγραμμο πτερύγιο: spanARchord
= )
Η σχέση (25) δείχνει ότι: Ο συντελεστής επαγόμενης αντίστασης είναι ανάλογος του συντελεστή άνωσης στη δευτέρα δύναμη. Προφανώς για μηδενική άνωση (συμμετρική πτέρυγα σε μηδενική γωνία πρόσπτωσης) η επαγόμενη αντίσταση είναι μηδέν. Ο συντελεστής επαγόμενης αντίστασης είναι αντιστρόφως ανάλογος του λόγου επιμήκους της πτέρυγας. Για τον ίδιο συντελεστή άνωσης, αυξανομένου του λόγου επιμήκους ο συντελεστής επαγόμενης αντίστασης μικραίνει. Στο όριο ∞→AR η πτέρυγα τείνει να αποκτήσει παντού διδιάστατη ροή και η σχέση (25) δείχνει ότι η επαγόμενη αντίσταση τείνει στο μηδέν!!!. 7.1. Υπολογισμός των αεροδυναμικών χαρακτηριστικών πτέρυγας για την
περίπτωση τροποποιημένης ελλειπτικής κατανομής φόρτισης. Η χρήση ελλειπτικής κατανομής φόρτισης δίνει ιδιαίτερα απλές εκφράσεις για τους συντελεστές άνωσης, επαγόμενης αντίστασης και κατωρεύματος. Στην παράγραφο αυτή θα εξετάσουμε την περίπτωση φόρτισης που προκύπτει σαν διαταραχή της ελλειπτικής φόρτισης, διατηρεί όμως τη συμμετρία γύρω από το μέσο του ανοίγματος του πτερυγίου, ενώ ικανοποιεί και τις ίδιες συνθήκες (μηδενικής φόρτισης) στα άκρα. Η εξίσωση της «τροποποιημένης ελλειπτικής κατανομής» είναι η ακόλουθη:
2 2
0 1 1y yas s
⎛ ⎞⎛ ⎞ ⎛ ⎞Γ = Γ − +⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠
21

Γραφική αναπαράσταση της τροποποιημένης ελλειπτικής φόρτισης για διαφορετικές τιμές του α φαίνεται στο σχήμα 10. Ανωση (τροποποιημένη ελλειπτική κατανομή φόρτισης): Από την εξίσωση (16) η άνωση δίνεται από την σχέση:
2 2
0 1 1s s
s s
y yL V dy V a dys s
ρ ρ− −
⎛ ⎞⎛ ⎞ ⎛ ⎞= Γ = Γ − +⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠∫ ∫
Χρησιμοποιώντας την συμμετρία του πυρήνα ολοκλήρωσης η προηγούμενη σχέση γίνεται:
2 2
00
2 1 1s y yL V a d
s sρ
⎛ ⎞⎛ ⎞ ⎛ ⎞= Γ − +⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠∫ y
Για τον αναλυτικό υπολογισμό του ολοκληρώματος του δευτέρου μέλους της προηγούμενης σχέσης κάνουμε την ακόλουθη αλλαγή μεταβλητών: siny s φ= , οπότε:
φφdsdy cos= Αντικαθιστώντας την προηγούμενη σχέση στο ολοκλήρωμα για την άνωση και παρατηρώντας ότι τα όρια ολοκλήρωσης ως προς φ είναι από 0 έως π/2, έχουμε:
( )2
2 20
0
2 cos 1 sinL V s a d
π
ρ φ φ= Γ +∫ φ
Γράφοντας όπου α=4λ, η προηγούμενη σχέση γίνεται:
22 2 2
00
2 (cos 4 cos sin )L V s d
π
ρ φ λ φ φ= Γ +∫ φ
Και υπολογίζοντας τα ολοκληρώματα παίρνουμε:
02 44 16
L V s π πρ λ⎡ ⎤= Γ +⎢ ⎥⎣ ⎦
ή:
(0 12
L V s )πρ λ= Γ + (26)
ή, συναρτήσει του συντελεστή άνωσης:
(0 1LsC
VS)π λΓ
= + (27)
Κατώρευμα (τροποποιημένη ελλειπτική κατανομή φόρτισης): Υπενθυμίζουμε την σχέση (14) για το κατώρευμα:
11
14
s
ys
d dydy
wy yπ −
⎛ ⎞Γ⎜ ⎟− ⎝ ⎠=
−∫
Στην ακριβώς προηγούμενη παράγραφο (δηλαδή στον υπολογισμό της άνωσης) η ύπαρξη συμμετρίας της ολοκληρωτέας ποσότητας είχε οδηγήσει στην επιλογή της αντικατάστασης siny s φ= . Στην παρούσα περίπτωση δεν έχομε τέτοια συμμετρία και μια πιο κατάλληλη αντικατάσταση παρέχεται από τις ακόλουθες σχέσεις:
θcossy −= , 11 cosθsy −= (28) οπότε: για sy −= , 0=θ , για sy += , πθ =
22

Θέτομε επίσης (όπως προηγουμένως): λ4=a . Έτσι η σχέση για το κατώρευμα γίνεται:
110
14 cos cos
d ddw
s
π
θ
θθ
π θ θ
Γ⎛ ⎞⎜ ⎟− ⎝ ⎠=
−∫ (29)
και οι σχέσεις για την κατανομή φόρτισης γίνονται:
( )2 20 1 cos 1 4 cosθ λ θΓ = Γ − +
( ) ( )
( )
2 20
2 20
30
cos 1 4 cos 8 sin cos
cos 1 4 cos 8 (1 cos )cos
1 8 cos 12 cos
dd
θ λ θ λ θ θθ
θ λ θ λ θ θ
λ θ λ θ
Γ ⎡ ⎤= Γ + + −⎣ ⎦
⎡ ⎤= Γ + + − −⎣ ⎦
⎡ ⎤= Γ − +⎣ ⎦
Θέτοντας 4
3coscos3cos3 θθθ += η σχέση για την κλίση της κατανομής φόρτισης
γίνεται:
( )0 1 cos 3 cos3dd
λ θ λ θθΓ
= Γ + +⎡ ⎤⎣ ⎦
Αντικαθιστώντας την προηγούμενη στην σχέση (29) έχουμε:
( )1
0
1 10
1 cos 3 cos34 cos cos cos cos
w ds
π
θ
λ θ λ θ θπ θ θ θ θ
+⎧ ⎫Γ= +⎨ ⎬− −⎩ ⎭
∫
Τα ολοκληρώματα της προηγούμενης σχέσης παρουσιάζουν πυρήνα με ιδιομορφία τύπου Cauchy. Έτσι ως τιμή του ολοκληρώματος νοείται η κύρια τιμή κατά Cauchy (Cauchy principal value) [5]. Για τον υπολογισμό τους θα χρησιμοποιηθεί το ολοκλήρωμα του
Glauert: 1
1
0 1 sinsin
coscoscos
θθπθ
θθθπ ndnGn =
−= ∫
Το ολοκλήρωμα του Glauert μπορεί να υπολογιστεί με χρήση μιγαδικών συναρτήσεων και η απόδειξή του βρίσκεται σε βιβλία αεροδυναμικής [2]. Χρησιμοποιώντας το ολοκλήρωμα του Glauert η σχέση για το κατώρευμα γίνεται:
( )1
1 1
1 1
sin sin 31 34 sin sin
wsθ
π θ π θλ λπ θ θ
⎡ ⎤Γ= + +⎢ ⎥
⎣ ⎦
Χρησιμοποιώντας επιπλέον τις σχέσεις: ( )1cos4sin
3sin1
2
1
1 −= θθθ , 11 cosθsy −= , η σχέση
για το κατώρευμα γίνεται:
( )1
20 11 12 3
4yw
s sθ λ λ λ⎧ ⎫Γ ⎪ ⎪⎛ ⎞= + + −⎨ ⎬⎜ ⎟
⎝ ⎠⎪ ⎪⎩ ⎭
ή ισοδύναμα:
20 1 2 12
4yw
s sλ λ
⎧ ⎫Γ ⎪ ⎛ ⎞= − +⎨ ⎜ ⎟⎝ ⎠⎪ ⎪⎩ ⎭
⎪⎬ (30)
23
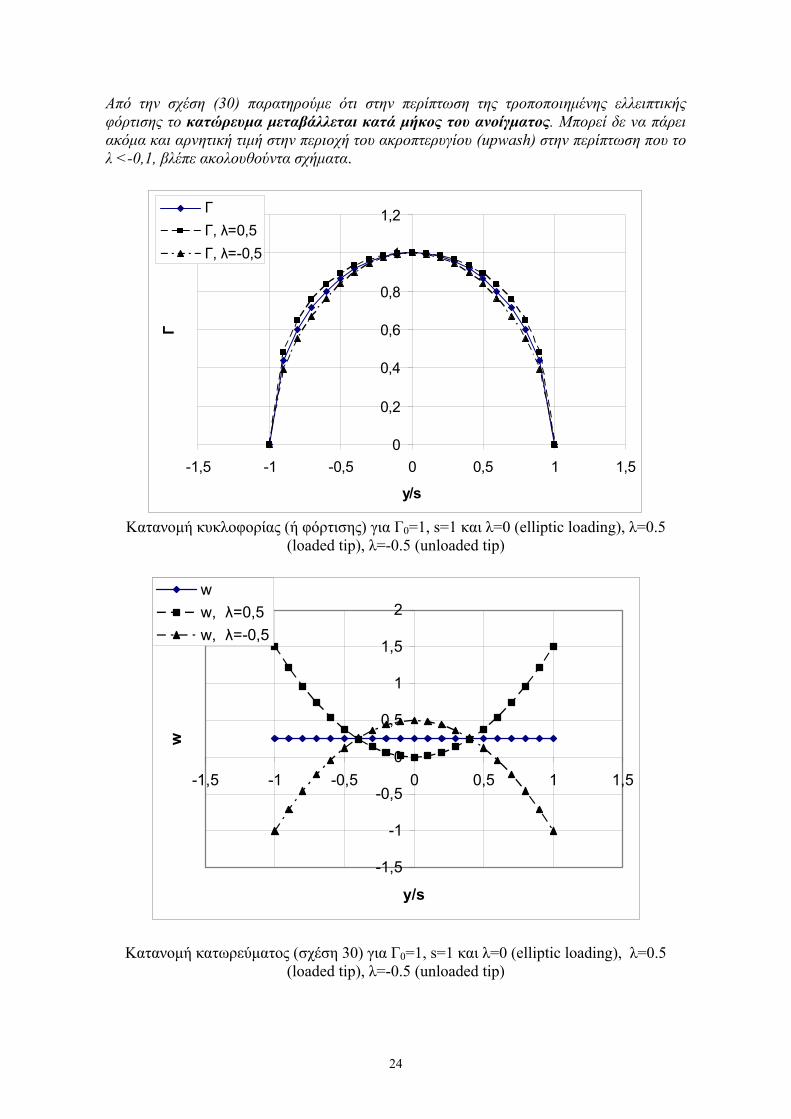
Από την σχέση (30) παρατηρούμε ότι στην περίπτωση της τροποποιημένης ελλειπτικής φόρτισης το κατώρευμα μεταβάλλεται κατά μήκος του ανοίγματος. Μπορεί δε να πάρει ακόμα και αρνητική τιμή στην περιοχή του ακροπτερυγίου (upwash) στην περίπτωση που το λ <-0,1, βλέπε ακολουθούντα σχήματα.
0-1,5 -1 -0,5 0 0,5 1 1,5
y/s
0,2
0,4
0,6
0,8
1
1,2
Γ
ΓΓ, λ=0,5Γ, λ=-0,5
Κατανομή κυκλοφορίας (ή φόρτισης) για Γ0=1, s=1 και λ=0 (elliptic loading), λ=0.5
(loaded tip), λ=-0.5 (unloaded tip)
-1,5
-1
-0,5
0
0,5
1
1,5
2
-1,5 -1 -0,5 0 0,5 1 1,5
y/s
w
ww, λ=0,5w, λ=-0,5
Κατανομή κατωρεύματος (σχέση 30) για Γ0=1, s=1 και λ=0 (elliptic loading), λ=0.5 (loaded tip), λ=-0.5 (unloaded tip)
24

Επαγόμενη αντίσταση τροποποιημένης ελλειπτικής κατανομής φόρτισης
Υπενθυμίζουμε την σχέση (18) για την επαγόμενη αντίσταση: s
s
D wυ ρ−
dy= Γ∫ .
Αντικαθιστώντας την σχέση (30) για το κατώρευμα έχουμε: 2 2
001 2 12 1 1 4
4
s
s
y y yD ds s sυ
ρ λ λ λ−
⎧ ⎫ ⎛ ⎞Γ ⎪ ⎪⎛ ⎞ ⎛ ⎞ ⎛ ⎞= − + Γ − +⎜ ⎟⎨ ⎬ ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠⎪ ⎪ ⎝ ⎠⎩ ⎭∫
2
ys
Λαμβάνοντας υπόψη την συμμετρία του πυρήνα της προηγούμενης σχέσης και αλλάζοντας μεταβλητές σύμφωνα με τις σχέσεις: φsinsy = , φφdsdy cos= , έχουμε:
( ) ( )2 2
2 2 20
0
2 1 2 12 sin cos 1 4 sin4
D d
π
υρ λ λ φ φ λ φΓ
= − + +∫ φ
ή μετά από πράξεις:
( ) ( )2 2
2 2 2 2 2 4 20
0
1 2 cos 16 8 sin cos 48 sin cos2
D d
π
υρ λ φ λ λ φ φ λ φ φΓ ⎡ ⎤= − + − +⎣ ⎦∫ φ
Υπολογίζοντας τα ολοκληρώματα έχουμε:
( ) ( )2
2 20 1 2 16 8 482 4 16 32
Dυρ π π πλ λ λ λΓ ⎡ ⎤= − + − +⎢ ⎥⎣ ⎦
ή 2
20 1 2 42
Dυπρ λ λΓ ⎡ ⎤= + +⎣ ⎦ (31)
Εισάγοντας και πάλι το συντελεστή επαγόμενης αντίστασης:
SV
DCD2
2
1 ρ
υυ
=
και χρησιμοποιώντας την σχέση (27) η σχέση (31) γίνεται: [ ]( )222
2222
18421
λπλλπρ
υ +++
=s
SVCC LD
ή ισοδύναμα:
( ) ⎥⎦
⎤⎢⎣
⎡
++= 2
22
131
λλ
πυ ARCC L
D (32)
Εισάγοντας περαιτέρω: 2
13 ⎟
⎠⎞
⎜⎝⎛
+=
λλδ
η σχέση (32) γίνεται:
[ δπυ
+= 12
ARCC L
D ] (33)
(Υπενθυμίζεται ότι 2 2
0 1 1 4ys s
λ⎛ ⎞⎛ ⎞ ⎛ ⎞Γ = Γ − +⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠
y , α=4λ)
Συγκρίνοντας την σχέση (33) με την αντίστοιχη σχέση επαγόμενης αντίστασης ελλειπτικής φόρτισης (σχέση 25), παρατηρούμε ότι οποιαδήποτε τροποποίηση της ελλειπτικής φόρτισης οδηγεί σε αύξηση του συντελεστή επαγόμενης αντίστασης (το δ είναι πάντα θετικό), βλέπε και σχήμα που ακολουθεί. Αντιθέτως προκειμένου η επαγόμενη αντίσταση να είναι ελάχιστη θα πρέπει το δ=0, οπότε λ=0 και η φόρτιση θα πρέπει να είναι
25
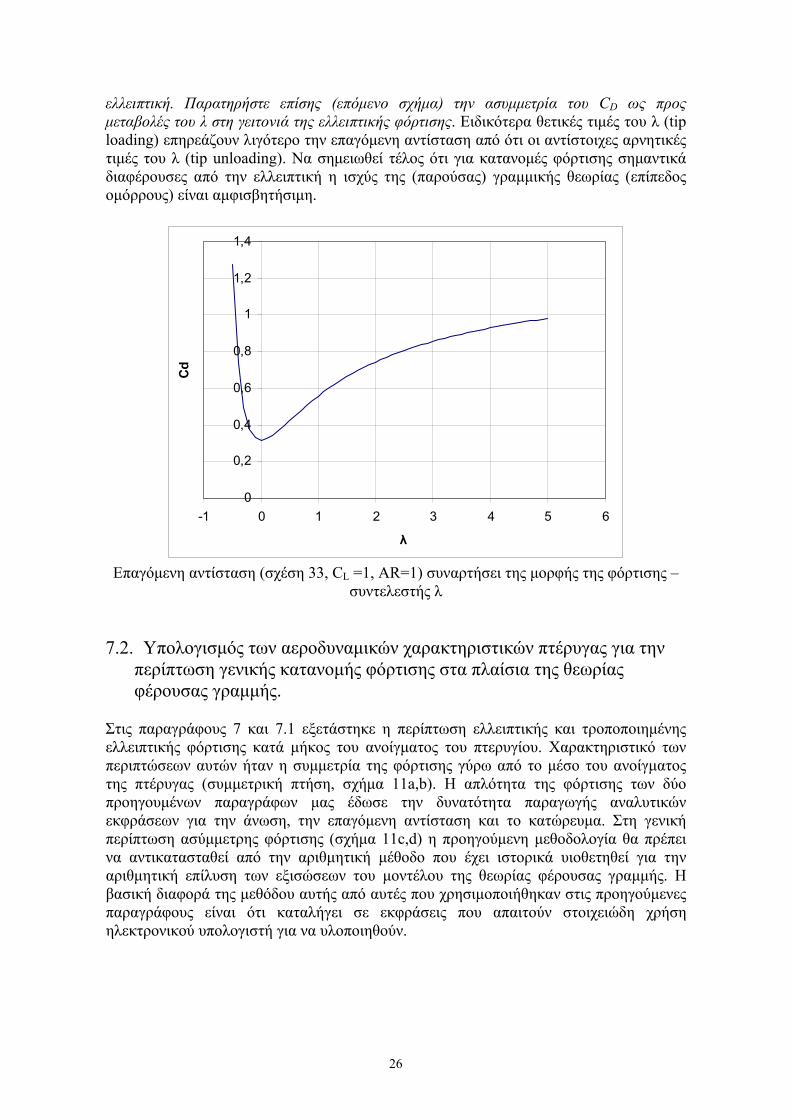
ελλειπτική. Παρατηρήστε επίσης (επόμενο σχήμα) την ασυμμετρία του CD ως προς μεταβολές του λ στη γειτονιά της ελλειπτικής φόρτισης. Ειδικότερα θετικές τιμές του λ (tip loading) επηρεάζουν λιγότερο την επαγόμενη αντίσταση από ότι οι αντίστοιχες αρνητικές τιμές του λ (tip unloading). Να σημειωθεί τέλος ότι για κατανομές φόρτισης σημαντικά διαφέρουσες από την ελλειπτική η ισχύς της (παρούσας) γραμμικής θεωρίας (επίπεδος ομόρρους) είναι αμφισβητήσιμη.
0
0,2
-1 0 1 2 3 4 5 6
λ
0,4
0,6
0,8
1
1,2
1,4
Cd
Επαγόμενη αντίσταση (σχέση 33, CL =1, AR=1) συναρτήσει της μορφής της φόρτισης –
συντελεστής λ 7.2. Υπολογισμός των αεροδυναμικών χαρακτηριστικών πτέρυγας για την
περίπτωση γενικής κατανομής φόρτισης στα πλαίσια της θεωρίας φέρουσας γραμμής.
Στις παραγράφους 7 και 7.1 εξετάστηκε η περίπτωση ελλειπτικής και τροποποιημένης ελλειπτικής φόρτισης κατά μήκος του ανοίγματος του πτερυγίου. Χαρακτηριστικό των περιπτώσεων αυτών ήταν η συμμετρία της φόρτισης γύρω από το μέσο του ανοίγματος της πτέρυγας (συμμετρική πτήση, σχήμα 11a,b). Η απλότητα της φόρτισης των δύο προηγουμένων παραγράφων μας έδωσε την δυνατότητα παραγωγής αναλυτικών εκφράσεων για την άνωση, την επαγόμενη αντίσταση και το κατώρευμα. Στη γενική περίπτωση ασύμμετρης φόρτισης (σχήμα 11c,d) η προηγούμενη μεθοδολογία θα πρέπει να αντικατασταθεί από την αριθμητική μέθοδο που έχει ιστορικά υιοθετηθεί για την αριθμητική επίλυση των εξισώσεων του μοντέλου της θεωρίας φέρουσας γραμμής. Η βασική διαφορά της μεθόδου αυτής από αυτές που χρησιμοποιήθηκαν στις προηγούμενες παραγράφους είναι ότι καταλήγει σε εκφράσεις που απαιτούν στοιχειώδη χρήση ηλεκτρονικού υπολογιστή για να υλοποιηθούν.
26
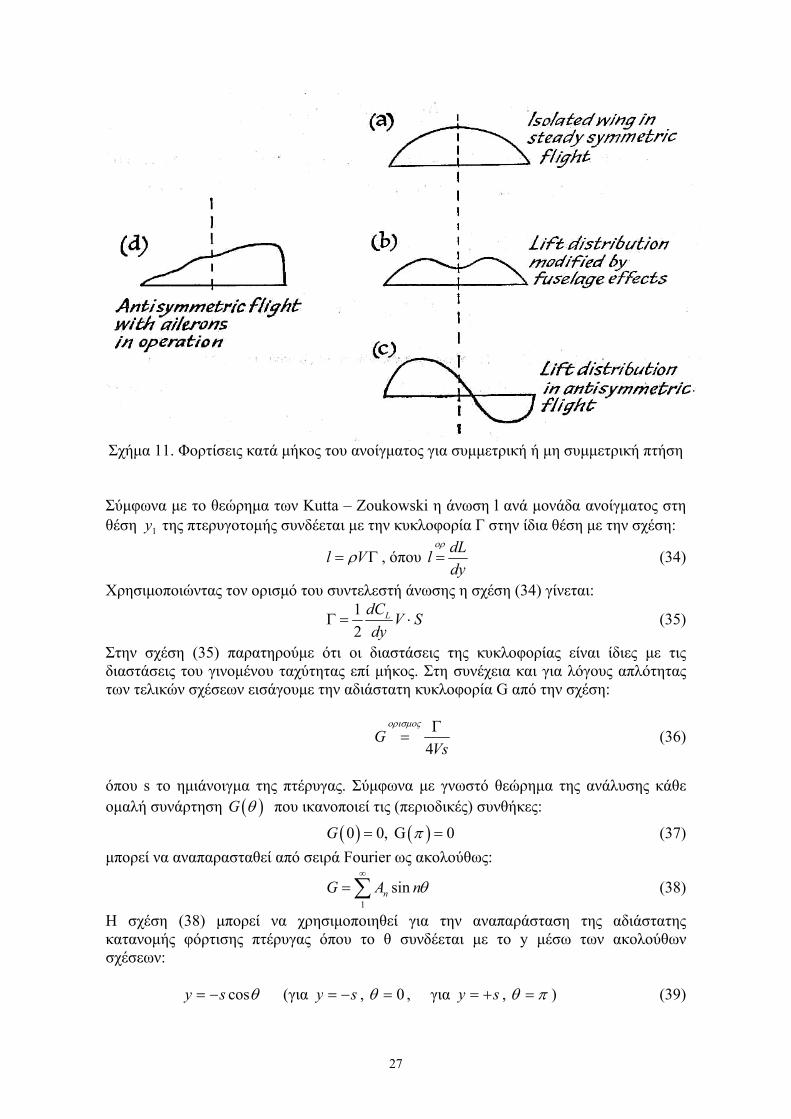
Σχήμα 11. Φορτίσεις κατά μήκος του ανοίγματος για συμμετρική ή μη συμμετρική πτήση Σύμφωνα με το θεώρημα των Kutta – Zoukowski η άνωση l ανά μονάδα ανοίγματος στη θέση της πτερυγοτομής συνδέεται με την κυκλοφορία Γ στην ίδια θέση με την σχέση: 1y
l Vρ= Γ , όπου dydLl
ορ= (34)
Χρησιμοποιώντας τον ορισμό του συντελεστή άνωσης η σχέση (34) γίνεται: 12
LdC V Sdy
Γ = ⋅ (35)
Στην σχέση (35) παρατηρούμε ότι οι διαστάσεις της κυκλοφορίας είναι ίδιες με τις διαστάσεις του γινομένου ταχύτητας επί μήκος. Στη συνέχεια και για λόγους απλότητας των τελικών σχέσεων εισάγουμε την αδιάστατη κυκλοφορία G από την σχέση:
4G
Vs
ορισμος Γ= (36)
όπου s το ημιάνοιγμα της πτέρυγας. Σύμφωνα με γνωστό θεώρημα της ανάλυσης κάθε ομαλή συνάρτηση ( )G θ που ικανοποιεί τις (περιοδικές) συνθήκες:
( ) ( )0 0, G 0G π= = (37) μπορεί να αναπαρασταθεί από σειρά Fourier ως ακολούθως:
1sinnG A nθ
∞
= ∑ (38)
Η σχέση (38) μπορεί να χρησιμοποιηθεί για την αναπαράσταση της αδιάστατης κατανομής φόρτισης πτέρυγας όπου το θ συνδέεται με το y μέσω των ακολούθων σχέσεων:
θcossy −= (για sy −= , 0=θ , για sy += , πθ = ) (39)
27
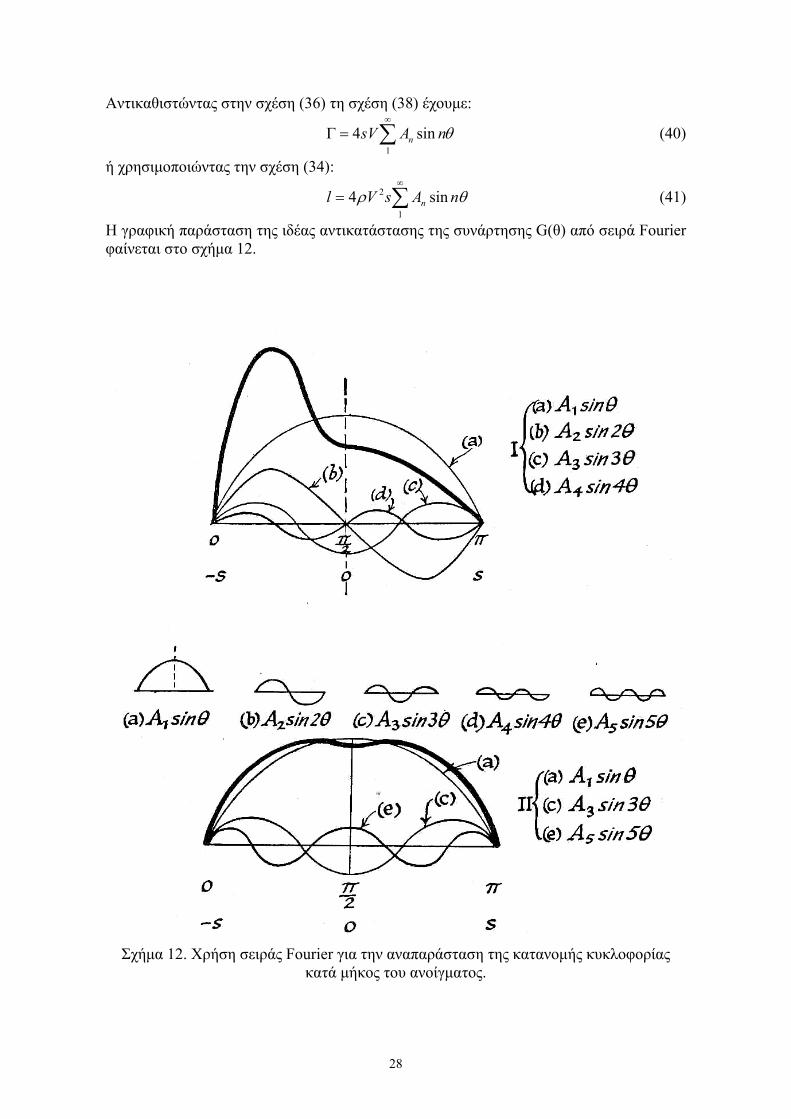
Αντικαθιστώντας στην σχέση (36 :
1
) τη σχέση (38) έχουμε
4 sinnsV A nθ∞
Γ = ∑ (40)
ή χρησιμοποιώντας την σχέση (34):
(41)
Η γραφική παράσταση της ιδέας αντικατάστασης της συνάρτησης G(θ) από σειρά Fourier
∑∞
=1
2 sin4 θρ nAsVl n
φαίνεται στο σχήμα 12.
Σχήμα 12. Χρήση σειράς Fourier για την αναπαράσταση της κατανομής κυκλοφορίας
κατά μήκος του ανοίγματος.
28

Ανωση (γενική κατανομή φόρτισης):
άνωση του πτερυγίου y:s
s
L V dρ−
= Γ∫ . Υπενθυμίζουμε την σχέση (16) για την Αλλάζοντας
την μεταβλητή ολοκλήρωσης σύμφωνα με την σχέση θcossy −= , η άνωση γίνεται
0
sinL V s dπ
ρ θ θ= Γ∫ . Αντικαθιστώντας και την σχέση (40) έχουμε:
( ) ( )( )
( ) ( )
2
0
2 2
0
2 2
1 0
1
2
4 sin sin
4 cos 1 cos 1
sin 1 sin 1142 1 1
n
n
nn
L V Vs A n d
s V A n n d
n ns V A
n n
π
π
π
ρ θ θ θ
ρ θ θ
θ θρ
∞
=
=
= − −
⎡ ⎤− +⎛ ⎞= −⎢ ⎥⎜ ⎟− +⎢ ⎥⎝ ⎠⎣ ⎦
∑∫
∑∫
∑
θ+
αταγράφοντας τους όρους της σειράς μέσα στις αγκύλες παρατηρούμε ότι για θ=0 ή θ=π Κ
είναι όλοι μηδέν (οι αριθμητές είναι μηδέν) με εξαίρεση τον πρώτο όρο ο οποίος έχει την απροσδιόριστη μορφή 0/0. Ως εκ τούτου:
00 0
sin 0 sin1 sinθ θ 2 sin 0... ...0 1 2 0
π ππθ θ θ π+ + − − = = =
αφού:
0
sinr
rLimr
θ θ→
=
οπότε:
SvCsVAL L222
1 214
21 ρρπ ==
και εισάγοντας το λόγο επιμήκους: 2(2 )sAR
S= , έχομε:
ARACL 1π= (42)
σχέση (42) δείχνει ότι ο συντελεστής άνωσης δεν εξαρτάται από τις λεπτομέρειες της Ηκατανομής φόρτισης αλλά μόνο από τον πρώτο όρο του αναπτύγματός της σε σειρά. Αντικαθιστώντας τον ορισμό του στην σχέση (42) έχουμε:
ατώρευμα (γενική κατανομή φόρτισης): αι τα όρια στην σχέση (14) για το κατώρευμα
LC
1222 AsVL πρ=
ΚΑλλάζοντας την μεταβλητή ολοκλήρωσης κέχουμε:
110
14 cos cos
d ddw
s
π
θ
θθ
π θ θ
Γ
=−∫
Στην περίπτωσή μας ισχύει η σχέση (40) για την κυκλοφορία:
29

4 sinnsV A nθΓ = ∑ αραγωγίζοντας: Π
4 cond sV nA nd
s θθΓ
= ∑
Αντικαθιστώντας την προηγούμενη στην έκφραση για το έχουμε: κατώρευμα
1
1cos sin4 nnA n nsV Vπ ϑ
1 104 cos cos sinnw d nAsθ
π θϑπ θ θ π θ−∫
όπου για την μετάβαση από το δεύτερο στο τρίτο μέλος της ισότητας χρησιμοποιήθηκε το
γενικό σημείο κατά το άνοιγμα της πτέρυγας η σχέση για το
= =∑ ∑
ολοκλήρωμα Glauert. Συμβολίζοντας με θ τοκατώρευμα γίνεται:
θθ
sinsin∑=
nnAVw n (43)
πως φαίνεται η σχέση για το κατώρευμα περιλαμβάνει όλους τους όρους για την κατανομή Ό
φόρτισης σε αντίθεση με την άνωση που εξαρτάται από τον πρώτο μόνο όρο. Επαγόμενη αντίσταση γενικής κατανομής φόρτισης
σχέση dy s
s
D wυ ρ−
= Γ∫Αντικαθιστώντας την σχέση (43) για το κατώρευμα στην , έχουμε:
0
sin4 ( sin ) sin
sinn
n
V nA nD sV A n
π
υ
θs dρ θ θ
θ= ∑ ∑∫ θ
όπου έγινε αλλαγή μεταβλητής και ορίου ολοκλήρωσης αντίστοιχη με αυτήν υπολογισμού της άνωσης. Μετά από πράξεις η προηγούμενη σχέση παίρνει την μορφή:
2 2π
0
4 ( sin )( sin ) n nD V s nA n A n dυ ρ θ θ∫ θ= ∑ ∑Για τον υπολογισμό του ολοκληρώματος παρατηρούμε ότι:
)
Κατά τον υπολογισμό του ολοκληρώματος όλοι οι όροι εκτός από τους υψωμένους στο
τετράγωνο μηδενίζονται διότι ισχύει
( )(π
θϑθθθθ
θθθθθθθ
π
dAAAAA
dAAAAAAI
))... 2sinsin(...3sin32sin2sin(
...3sin2sinsin...3sin32sin2sin
021
223
222
221
3210
321
∫
∫
+++=
++++=
:0
sin sin/ 2 ,
mx nxdxm n m nπ ακεραιοι και
0 , m n m nπ ακεραιοι και ≠⎧= ⎨ ⎩
∫ =
Άρα έχουμε:
( )2 2 2 2 2 2 2 2 2 21 2 3 1 2 3
0
( sin 2 sin 2 3 sin 3 ....) 2 3 ...2 2 nI A A A d A A A nAπ πθ θ θ θ+ + = + + + = ∑∫
ε τις τελευταίες παρατηρήσεις η σχέση για την επαγόμενη αντίσταση γίνεται:
π
= +
Μ
∑ == SVCnAsVD Dn2222 14 ρ
22πρ
υυ
30

ή ισοδύναμα: ∑= 2nAARC π nDυ
(44)
Από την σχέση (42) έχουμε:
22
221 AR
CA L
π=
Αντικαθιστώντας την τελευταία σχέση στην σχέση (44) παίρνουμε:
2 22 2 2 232 4 ...A AC C A A32 42 2 2
1 1 1 1
1nL LDC n
AR A AR A A Aυ π π⎡ ⎤⎛ ⎞ ⎛ ⎞
+= = + + +⎢ ⎥⎟⎠
⎜ ⎟ ⎜⎝ ⎠ ⎝⎣ ⎦
ή εισάγοντας:
∑
...43221
24
21
23
21
22 +++=
AA
AA
AAδ
η σχέση για την επαγόμενη αντίσταση γίνεται:
( )δπυ
+= 1AR
C LD
2C (44α)
Όπως και στην περίπτωση της προηγουμένης παραο του μηδενός. Άρα ελάχιστη επαγόμενη αντίσταση θα έχουμε όταν δ=0, οπότε
γράφου το δ είναι πάντα μεγαλύτερο ή ίσ
0...32 === AA και η κατανομή της κυκλοφορίας θα δίνεται από την σχέση insVA14 s θΓ = (δηλαδή ελλειπτική φόρτιση).
περίπτωση φόρτισης) Ροπές (γενική το σχήμα 13 φαίνονται οι ροπές που ασκούνται στην πτέρυγα. Η ροπή «διατοιχισμού»
πρόσημο «-» μπήκε διότι για άνωση κατά τη
όπου χρησιμοποιήθηκε η σχέση
Σ(rolling) δίνεται από την σχέση (τοδιεύθυνση Ζ η ροπή διατοιχισμού –συμφωνα με το σχήμα 13- είναι αρνητική!):
s s
Rs s
L lydy V ydyρ− −
= − = − Γ∫ ∫ (45)
: l Vρ= Γ . Θέτοντας: 4 sinnsV A nθΓ = ∑ στην σχέση (45) και αλλάζοντας μεταβλητή και όρια λοκλήρωσης, προκύπτει: ο
( ) ( )
( ) ( )
2 3 2
0 0
14 ( sinR nL sV A n
3 2
0
3 2
1 0
) (s cos ) ( sin ) 4 ( sin )sin2 2
12 cos 2 cos 2 2
sin 2 sin 22 2
n
n
nn
s d s V A n d
s V A n n d
n ns V A
n n
π π
π
π
ρ θ θ θ θ ρ θ ϑ θ
ρ θ θ θ
θ θρ
∞
=
=
= − − +⎡ ⎤⎣ ⎦
⎡ ⎤− +⎛ ⎞= −⎢ ⎥⎜ ⎟− +⎢ ⎥⎝ ⎠⎣ ⎦
∑∫
∑∫
∑
(46)
Και υπολογίζοντας το άθροισμα (με τρόπο αντίστοιχο αυτού που χρησιμοποιήθηκε στον υπολογισμό της άνωσης) προκύπτει η ακόλουθη σχέση:
= ∑∫
31
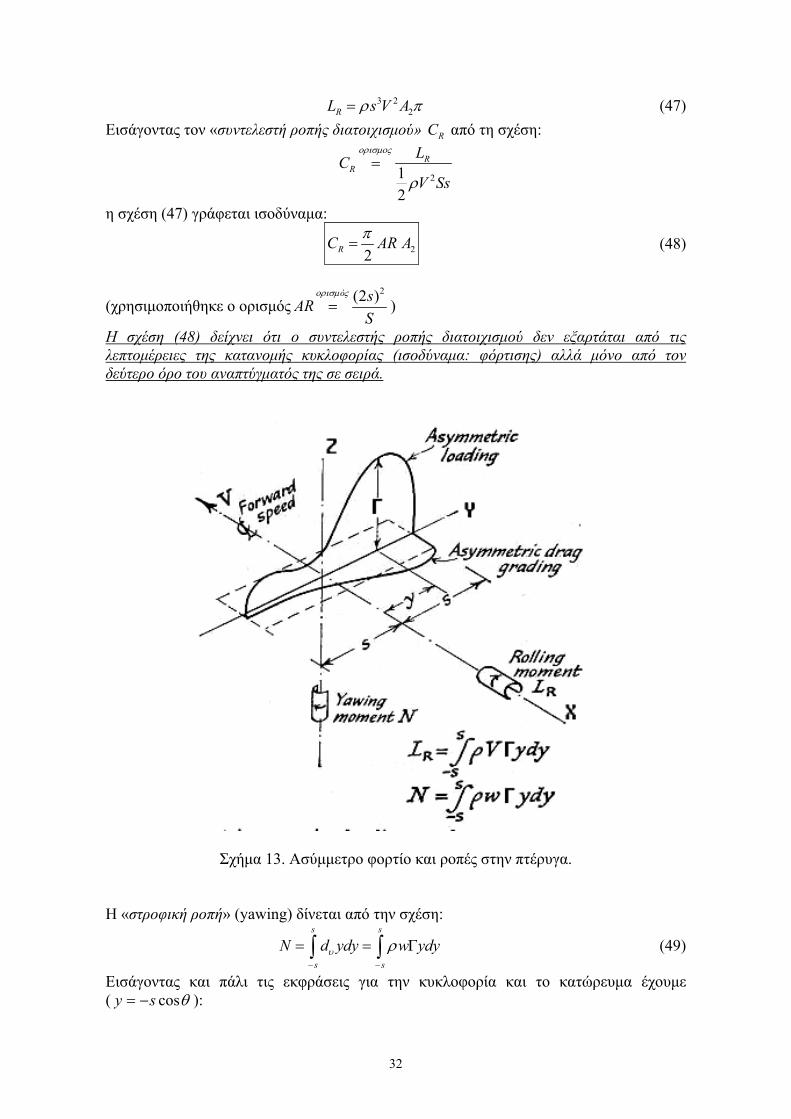
3 2L s V A2R ρ π= (47) Εισάγοντας τον «συντελεστή ροπής διατοιχισμού» RC από τη σχέση:
RC =
η σχέση (47) γράφεται ισοδύναμα:
212
V Ssρ
R Lορισμος
22RC AR Aπ= (48)
(χρησιμοποιήθηκε ο ορισμός
2(2 )ό sAR
S
ορισμ ς
= )
σχέση (48) δείχνει ότι ο συντελεστής ροπής διατοιχισμού δεν εξαρτάται από τις Ηλεπτομέρειες της κατανομής ισοκυκλοφορίας ( δύναμα: φόρτισης) αλλά μόνο από τον δεύτερο όρο του αναπτύγματός της σε σειρά.
Σχήμα 13. Ασύμμετρο φορτίο και ροπές στην πτέρυγα. Η «στροφική ροπή
(49)
Εισάγοντας και πάλι τις εκφράσεις για την κυκλοφορία και το κατώρευμα έχουμε
» (yawing) δίνεται από την σχέση: s s
N d ydy w ydyυ ρ= = Γ∫ ∫s s− −
( θcossy −= ):
32

3 2 2
sin4 ( sin )( cos )( sin ) s s d
sin
sin )( sin ) cos 2
nn
o
n n No
nA nN V sV A n
s V nA n A n d C V Ss
π θρ θ θ θ θ
14 (π
θ
ρ θ θ θ θ ρ
= −
= − =
∑ ∑∫
∑ ∑∫όπου ο «συντελεστής στροφικής ροπής». Λύνοντας την τελευταία ως προς λαμβάνομε:
NC NC
2 ( sin )( sin )cos N n no
C AR nA n A n dπ
θ θ θ= ∑ ∑∫ θ
απή μετά ό πράξεις:
( )[ ]1433221 12...7532 ++++++= nnN AAnAAAAAAARπC (50)
8. Η ολοκληρωτική/διαφορική εξίσωση φέροια την πτέρυγα. Προβλήματα συμπεριφοράς και σχεδίασης τις προηγούμενες παραγράφους παρήχθησαν σχέσεις μεταξύ της κατανομής της
υσας γραμμής γ Σπροσδεδεμένης κυκλοφορίας και των υδροδυναμικών χαρακτηριστικών μιας πτέρυγας (άνωση, κατώρευμα, επαγώμενη αντίσταση κλπ). Είναι πολύ ενδιαφέρον ότι σε όλες τις προηγούμενες παραγράφους η γεωμετρία των υδροτομών (σχήμα 3β) δεν εμφανίζεται πουθενά!!! Ο λόγος είναι ότι η συζήτηση των παραγράφων 7, 7.1 και 7.2 αφορούσε το
ν«εξωτερικό πρόβλημα» (βλέπε παράγραφο 3). Όπως ήδη α αφέραμε η θεωρία φέρουσας γραμμής ως ιδιόμορφο πρόβλημα της θεωρίας διαταραχών έχει και ένα «εσωτερικό πρόβλημ». Μεταξύ δε του ‘εσωτερικού’ και του ‘εξωτερικού’ προβλήματος ισχύει μία ‘σχέση συναρμογής’. Παραλείποντας τις λεπτομέρειες της μαθηματικής ανάπτυξης (Van Dyke, 1975) η σχέση συναρμογής είναι η ακόλουθη:
Ανωση φερουσας γραμμης Ανωση διδιαστατης πτερυγοτομηςy y
≡
Η φυσική σημασία της σχέσης συναρμογής είναι ότι οι φορμαλισμοί του εξωτερικού και σωτερικού προβλήματος πρέπει να οδηγούν στην ίδια τιμή για την άνωση της πτερυγοτομής στη θέση y (κατά μήκος του ανοίγματος της πτέρυγας) για κάθε . Στην συνέχεια θα χρησιμοποιηθεί η σχέση υναρμογής για να παραχθεί η ολοκληρο-
της) και χεδίασης (αντίστροφο πρόβλημα - αν γνωρίζουμε τη φόρτισή τη πτέρυγας πως
ε y
σδιαφορική εξίσωση του προβλήματος της ροής γύρω από πτερυγα. Με βάση την τελευταία αυτή εξίσωση θα εξεταστεί η λύση των προβλημάτων συμπεριφοράς (αν γνωρίζουμε τη γεωμετρία τρισδιάστατης πτέρυγας πως υπολογίζουμε τη φόρτισή συπολογίζουμε τη γεωμετρία της). Με βάση την 2-D θεωρία υδροτομών και υποθέτοντας ότι η σχέση άνωσης – γωνίας πρόσπτωσης της διδιάστατης πτερυγοτομής στη θέση 1y είναι γραμμική έχουμε:
[ ]aaC (51) 0L −= ∞∞ α
33
όπου da
dCa L=∞ , 0a η γωνία μηδενικής άνωσης και η φαινόμενη γωνία πρόσπτωσης ∞α
(σχήμα 8). Έστω τώρα ε η γωνία κατωρεύματος (Vw
=ε - σχήμα 8). Τότε εαα −= , ∞
όπου α η γεωμετρ γωνία πρόσπτωσης. Θέτοντας ική εαα −=∞ στην σχέση (51) έχουμε: [ ]εα −−= (52)
Εφαρμόζοντας τον ορισμ του συντελεστή άνωσης έ : ∞ )( 0aaCL
ό χουμε
2 2 2
lift per unit span1 1L
l VCV c V c1
2 2 2c V
ρ
ρ ρ ρ
Γ= = =
ή ισοδύναμα: 2
LCVc
Γ= (53)
τα δεύτερα μέλη των εξισώσεων (52) και (53) (εφαρμογή της σχέσης
: Εξισώνοντας συναρμογής) έχουμε
( )02 V a Vca
α ε∞
Γ= − − (54α)
Αλλά:
1
14
s
s
d dydy
V wy y
επ −
⎛ ⎞Γ⎜ ⎟⎝ ⎠= = −
−∫
Αντικαθιστώντας την τελευταία σχέση στη σχέση (54α) προκύπτει:
( )01s∞ −
2 14
sd dydy
V aca y y
απ
⎛ ⎞Γ⎜ ⎟Γ ⎝ ⎠= − +
−∫ (54β)
Η εξίσωση (54β) είναι η ολοκληρωτική-διαφορική εξίσωση
που συνδέει την κυκλοφορία με την γεωμετρία του πτερυγίου στα πλαίσια των υποθέσεων της θεωρίας φέρουσας γραμμής. Για να παράγουμε μια πιο ελκυστική μορφή για τη σχέση (54β) αντικαθιστούμε την κυκλοφορία από την ακόλουθη σειρά Fourier:
4 sinnsV A nθΓ = ∑ και το κατώρευμα από τη σχέση:
θθ
sisin
n∑=
nnAVw n
(βλέπε παράγραφο 7.2), οπότε λαμβάνουμε:
( )θ
θα
θsin
sins4 in2 0
∑∑ AsV n −−=∞
nnAVaV
can n
( ) ( )( )8
ys
μ ∞=c y a y , η προηγούμενη εξίσωση γίνεται: Εισάγοντας την παράμετρο
( )0( )( ) ( ) ( ) sin 1
sinny ny y a y A n μμ α θθ
⎛ ⎞− = +⎜ ⎟⎝ ⎠
∑ (55)
34
Εξετάζοντας τις παραμέτρου παρατηρούμε ότι μπορεί να χωριστακόλουθες ομάδες:
ς της σχέσης (55) ούν στις
• ,.., 21 AA που χαρακτηρίζουν τη φόρτιση της πτέρυγας (κατανομή κυκλοφορίας κατά
μήκος του ανοίγματος). • ( )yμ , παράμετρος που εξαρτάται από την γεωμετρία της τρισδιάστατης πτέρυγας
(χορδή και άνοιγμα) και από το συντελεστή da
a =∞ . Στη γενική περίπτωση η
χορδή εξαρτάται από την
dCL
θέση y. Το a∞ εξαρτάται και αυτό από την θέση y αλλά πολύ ασθενέστερα και εφ’ όσον λάβουμε υπόψη τη συνεκτικότητα. Για μη συνεκτικό ρευστό η θεωρητική τιμή του a∞ είναι 2π.
• 0a , που είναι ιδιότητα μιας ισοδύναμης διδιάστατης πτερυγοτομής στη θέση 1y (γωνία μηδενικής άνωσης – διδιάστατη θεώρηση). Στη γενική περίπτωση η γωνία μηδενικής άνωσης εξαρτάται από την θέση y και έχει σχέση με την κυρτότητα (camber) της υδροτομής στη θέση y.
• α , η γεωμετρική γωνία πρόσπτωσης (σχήμα 8) στη θέση 1y . Στη γενική περίπτωση πτέρυγας «με συστροφή» (twist) η γεωμετρική γωνία πρόσπτωσης εξαρτάται από την θέση y.
Πρόβλημα συμπεριφοράς (ή ανάλυσης): Για δεδομένη γεωμετρία του πτερυγίου, δεδομένη επ’ άπειρο ροή και δεδομένη θέση του (σε σχέση με την επ’ ‘απειρο ροή) να ρεθεί η κατβΛ
ανομή κυκλοφορίας και οι δυνάμεις και ροπές. ύση: Όταν όλα τα στοιχεία είναι γνωστά, η σχέση (55) είναι μία γραμμική εξίσωση για
αριθμητικά
αραλλαγή 2η- σχεδίαση με δεδομένη κατανομή φόρτισης κατά μήκος του ανοίγματος: ζητείται η γεωμετρία του πτερυγίου.
η ικανοποίηση της εξίσωσης (55) σε
εφαρμογής της σχέσης (55) σε υπολογισμούς σχεδίασης και συμπεριφοράς πτερυγίων θα δοθούν στην συνέχεια.
τον υπολογισμό των ,.., 21 AA . Ο υπολογισμός των ,.., 21 AA μπορεί να γίνει γράφοντας τη σχέση (55) για τόσα σημεία κατά μήκος του ανοίγματος της πτέρυγας όσα ο αριθμός των συντελεστών ,.., 21 AA που απαιτείται να υπολογιστούν. Το πρόβλημα συμπεριφοράς είναι ‘καλώς τεθημένο’ (well posed) αφού οδηγεί σε γραμμικό σύστημα που καθορίζει μονοσήμαντ γνώστους συντελεστές Πρόβλημα σχεδίασης (αντίστροφο πρόβλημα): Παραλλαγή 1η- βέλτιστη σχεδίαση: Στην περίπτωση αυτή δίνεται η ‘μεταφορική ικανότητα’ του πτερυγίου και ζητείται η βέλτιστη γεωμετρία.
α τους α ,.., 21 AA
ΠΔίδεται η φόρτιση κατά μήκος του ανοίγματος και Το πρόβλημα είναι ‘κακώς τεθημένο’ (ill posed) αφούμία θέση δεν μπορεί να δώσει τιμές στα μ, α και α0 αλλά μόνο μία σχέση μεταξύ τους στη θέση y. Ως εκ τούτου κάποια από τα άγνωστα μεγέθη πρέπει να επιλεγούν με άλλα κριτήρια. Η μεθοδολογία λύσης της 1ης παραλλαγής παρουσιάζεται στο 3ο παράδειγμα της επομένης παραγράφου. Στην περίπτωση της 2ης παραλλαγής (φόρτιση γνωστή) τα ,.., 21 AA είναι γνωστά και η σχέση (55) συσχετίζει τις γεωμετρικές παραμέτρους της πτέρυγας. Για τον μονοσήμαντο καθορισμό τους όμως απαιτούνται και επιπλέον συνθήκες. Παραδείγματα
35

8.1. Αριθμητικά παραδείγματα Παράδειγμα 1 ( Πρόβλημα συμπεριφοράς: δίνεται η γεωμετρία, ζητείται η φόρτιση).
στω μια πτέρυγα με χορδή που μικραίνει γραμμικά προς τα άκρα (tapered wing). Οι εροτομές της πτέρυγας έχουν μηδενική κυρτότητα (οπότε 0 0a
Έα = ). Για απλότητα
θε άλλη παράμετρος μεταβάλλεται γραμμικά από το έσο του ανοίγματος έως τα ακροπτερύγια σύμφωνα με τον ακόλουθο πίνακα:
Μέσο ανοίγματος Ακροπτερύγιο
θεωρούμε στο παράδειγμα, ότι και κάμ
Χορδή [m] 3.048 1.524 LCa
a∞∞
∂⎛ ⎞= ⎜ ⎟∂⎝ ⎠( α σε radians)
5.5
5.8
Γωνία πρόσπτωσης της χορδής της υδροτομής 5.5 (μοίρες) 3.5σχετικά με την αδιατάρακτη ροή στο άπειρο (η
πτέρυγα έχει μ ή- twist): a
(μοίρες)
ικρή συστροφ Το ολικό άνοιγμα (total s ας είναι 12.192m Υπ ν κατα κλοφ δι ισοδύναμη ελλειπτική κατανομή με την π 89,4 m/sec σε χαμηλό ύψος.
pan) της πτέρυγ
ολογίστε τα χαρακτηριστικά της πτέρυγας, τηεύθυνση του ανοίγματος και συγκρίνετέ την με την
τέρυγα σε ευθύγραμμη πτήση, με ταχύτητα
νομή της κυ ορίας κατά τη
Λύση Από τα δεδομένα του παραδείγματος έχουμε:
285.27192.122
524.1048.3area Wing mS =×+
=
333.585.27
192.12AR ioAspect Rat22
===span area
tre-line) ( ή θ από το ακροπτερύγιο) ισχύει: Σε κάθε θέση που απέχει y από το κέντρο (cen
3.048 1.524( ) 3.048 1 3.048 1 0.5 cos ,3.048
yc y s y ss
ϑ⎡ − ⎤⎛ ⎞= − = ⎡ − ⎤ − < <⎜ ⎟⎢ ⎥ ⎣ ⎦⎝ ⎠⎣ ⎦
5.5 5.8( ) 5.5 1 5.5 1 0.05455 cos5.5
LC ya ya s
ϑ∞∞
∂ ⎡ − ⎤⎛ ⎞ ⎛ ⎞= = + = ⎡ +⎜ ⎟⎜ ⎟ ⎢ ⎥ ⎤⎣ ⎦∂ ⎝ ⎠⎝ ⎠ ⎣ ⎦
5.5 3.5( ) 5.5 1 5.5 1 0.36364 cosya y5.5 s
ϑ⎡ − ⎤⎛ ⎞= − = ⎡ − ⎤⎜ ⎟⎢ ⎥ ⎣ ⎦⎝ ⎠⎣ ⎦ άρα μπορούμε να υπολογίσουμε το μ:
, (α σε μοίρες),
( )( )( ) 0.34375 1 0.5 cos 1 0.05455 cos8cay
sμ θ θ∞= = − +
και: ( )( )( )0.032995 1 0.5 cos 1 0.05455 cos 1 0.36364 cosaμ θ θ θ= − + − , (α σε ακτίνια),
36
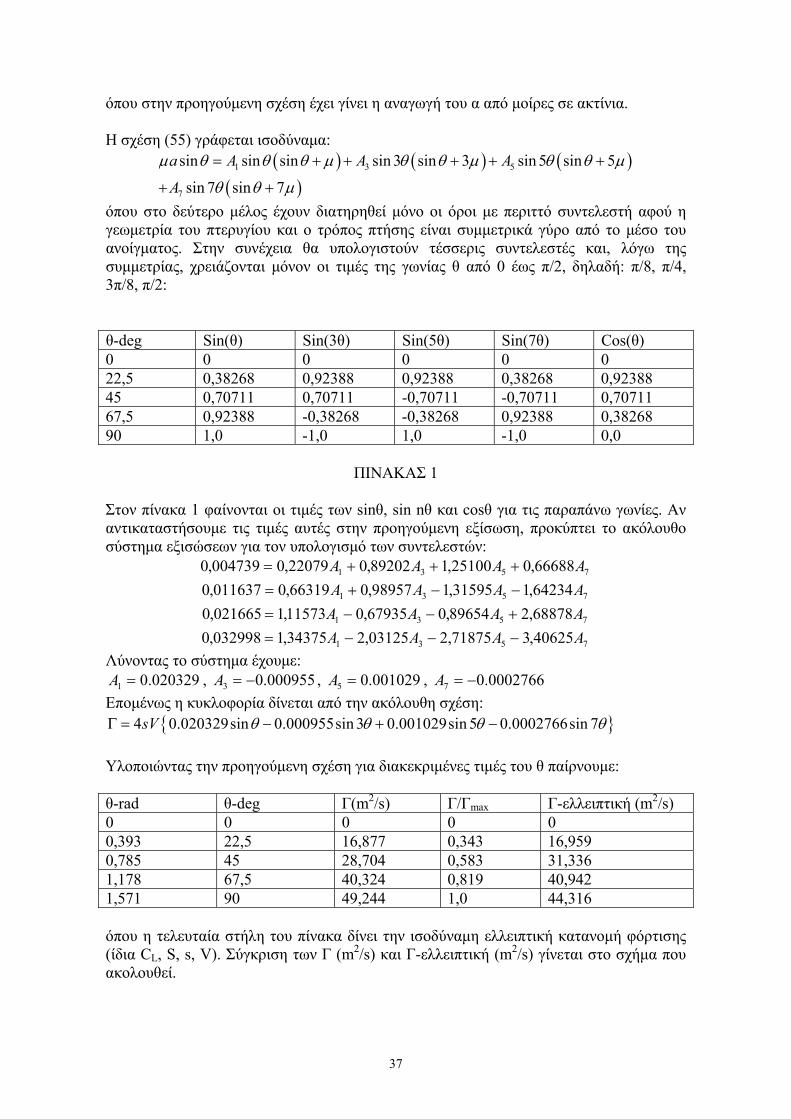
όπου στην προηγούμενη σχέση έχει γίνει η αναγωγή του α από μοίρες σε ακτίνια.
Η σχέση (55) γράφεται ισοδύναμα:
( ) ( ) ( )( )
1 3 5
7
sin sin sin sin 3 sin 3 sin 5 sin 5
sin 7 sin 7
a A A A
A
μ θ θ θ μ θ θ μ θ θ
θ θ μ
= + + + +
+ +
μ+
όπου στο δεύτερο μέλος έχουν διατηρηθεί μόνο οι όροι με περιττό σ η έσο του
νοίγματος. Στην συνέχεια θα υπολογιστούν τέσσερις συντελεστές και, λόγω της της γωνίας θ από 0 έως π/2, δηλαδή: π/8, π/4,
3π/8, π/2:
υντελεστή αφού γεωμετρία του πτερυγίου και ο τρόπος πτήσης είναι συμμετρικά γύρο από το μασυμμετρίας, χρειάζονται μόνον οι τιμές
θ-deg Sin(θ) Sin(3θ) Sin(5θ) Sin(7θ) Cos(θ) 0 0 0 0 0 0 22,5 0,38268 0,92388 0,92388 0,38268 0,92388 45 0,70711 0,70711 -0,70711 -0,70711 0,70711 67,5 0,92388 -0,38268 -0,38268 0,92388 0,38268 90 1,0 -1,0 1,0 -1,0 0,0
ΠΙΝΑΚ
πίνακα 1 ι οι τι inθ, s θ απάν Αν αταστήσο ιμές α προη εξίσω υθο μα εξισώ τον υπ των :
1 3
ΑΣ 1 Στον φαίνοντα μές των s in nθ και cos για τις παρ
ση, προκύπτειω γωνίες.
αντικσύστη
υμε τις τ υτές στην γούμενη το ακόλοσεων για ολογισμό συντελεστών
7531
751
7531
68878,289654,067935,011573,1021665,064234,131595,166319,0011637,066688,25100,18920,022,0739
AAAAAAAAA
+−−=−+=
++=
0+2A079A004,0
398957,0 A −
7531 40625,371875,203125,234375,1032998,0 AAAA −−−=Λύνοντας το σύστημα έχουμε:
020329.0=A , 000955.0−=A , 001029.05 =A , 0.0 0027667 −=A Επομένως η κυκλοφορία δίνεται από την ακόλουθη σχέση:
4 0.020329sin 0.000955sin 3 0.001029sin 5 0.0002766sinsV 7θ θ θ θΓ = − + − Υλοποιώντας την προηγούμενη σχέση για διακεκριμένες τιμές του θ παίρνουμε:
θ-rad θ-deg Γ(m2/s) Γ/Γmax -ελλειπτική (m2/s)
Γ0 0 0 0 0 0,393 22,5 16,877 0,343 16,959 0,785 45 28,704 0,583 31,336 1,178 67,5 40,324 0,819 40,942 1,571 90 49,244 1,0 44,316 όπου η τελευταία του πίνακα ν ισοδύ λλειπτικ ς
L, S, s, V). ριση των Γ ( Γ-ελλειπτική (m2/s) γίνε σχήμα που θεί.
στήλη δίνει τη ναμη ε ή κατανομή φόρτιση(ίδια Cακολου
Σύγκ m2/s) και ται στο
37
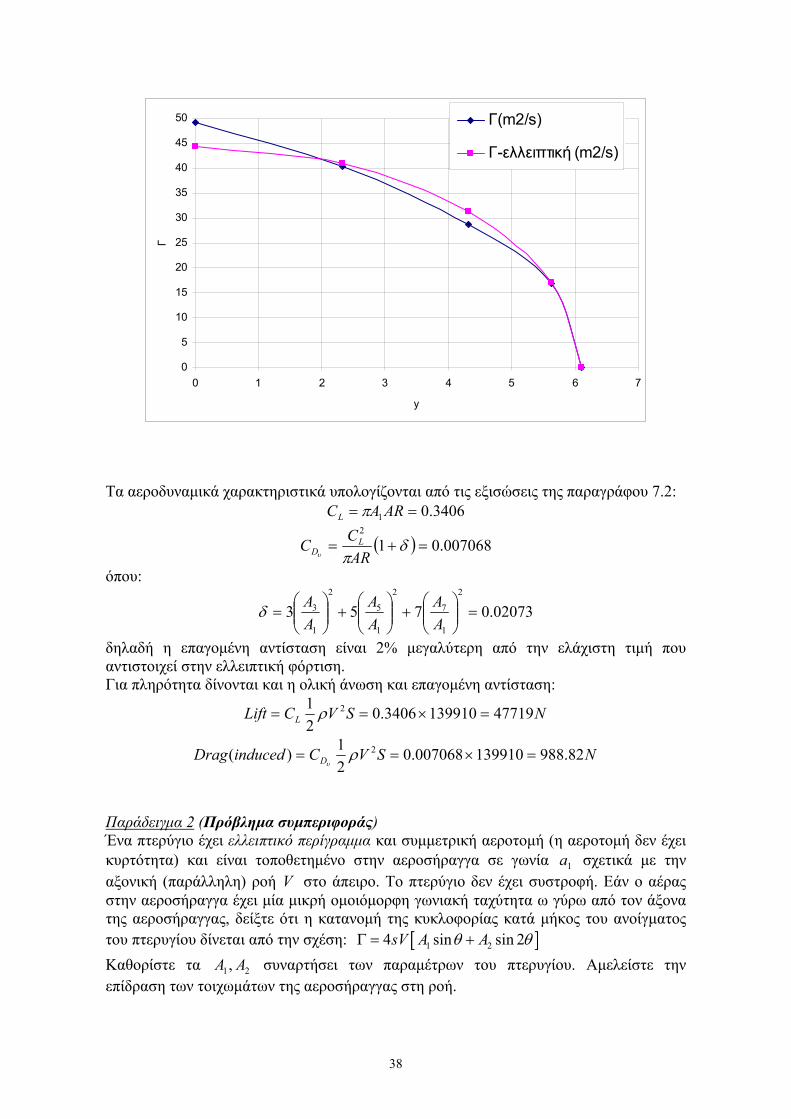
0
5
10
15
20
25
30
35
40
45
50
0 1 2 3 4 5 6 7
y
Γ
Γ(m2/s)
Γ-ελλειπτική (m2/s)
Τα αεροδυναμικά χαρακτηριστικά υπολογίζονται από τις εξισώσεις της παραγράφου 7.2:
3406.01 == ARACL π
( ) 007068.012
=+= δπυ ARCC L
D
όπου:
02073.07532
7
2
5
2
3 =⎟⎞
⎜⎛
+⎟⎞
⎜⎛
+⎟⎞
⎜⎛
=AAAδ
111⎟⎠
⎜⎝
⎟⎠
⎜⎝
⎟⎠
⎜⎝ AAA
δηλαδή η επαγομένη αντίσταση είναι 2% μεγαλύτερη πό την ελάχιστη τιμή που αντιστοιχεί στην ελλειπτική φόρτιση.
ρότητα δίνονται και η ολική άνωση και επαγομένη αντίσταση:
α
Για πλη
NSVCLift L 477191399103406.021 2 =×== ρ
NSVCinducedDrag D 82.988139910007068.02
)( 2 =×== ρυ
1
Παράδειγμα 2
(Πρόβλημα συμπεριφοράς) Ένα πτερύγιο έχει ελλειπτικό περίγραμμα και συμμετρική αεροτομή (η αεροτομή δεν έχει κυρτότητα) και είναι τοποθετημένο στην αεροσήραγγα σε γωνία σχ ικά με την αξονική (παράλληλη) ροή
1a ετV ότι
στο άπειρο. Το πτερύγιο δεν έχει . Εάν ο αέρας την αεροσήραγγα έχει μία μικρή ομοιόμορφη γωνιακή ταχύτητα ω από τον άξονα ης αεροσήραγγας, δείξτε η κατανομή της κυκλοφορίας κατά του ανοίγματος
συστροφήγύρω
μήκοςστ
[ ]1 2in sin 2sV A Aτου πτερυγίου δίνεται από την σχέση: 4 s θ θ+ Καθορίστε τα 21, AA συναρτήσει των παραμέτρων του πτερυγίου. Αμελείστε την επίδραση των τοιχωμάτων τ ς αεροσήραγγας στη ροή.
Γ =
η
38

Λύση Η ολοκληρωτική εξίσωση που συνδέει γεωμετρία πτέρυγας και φόρτιση είναι (55):
( ) ∑ ⎟⎞
⎜⎝⎛ +=−
μθμ 1sin0nnAaa n
⎠θsinτην περίπτωσή μας διότι έχω αεροτομή χωρίς κυρτότητα (συμμετρική) και η
, λαμβάνοντας υπόψη την περιστροφή του αέρα της αεροσήραγγας θα 00 =a , Σ
γωνία πρόσπτωσηςείναι:
1 1( cos )y sa a a
V Vω θ ω
= + = −
Επειδή το περίγραμμα είναι ελλειπτικό1 και η πτέρυγα χωρίς συστροφή θα
ισχύει: θμμ sin0= όπου max0 8
c as
μ ∞= και η σχέση (55) γίνεται:
00 1
sincossin sin 1sinnnsa A n
Vμ θω θμ θ θ
θ⎛ ⎞⎡ ⎤− = +⎜ ⎟⎢ ⎥⎣ ⎦ ⎝ ⎠
∑
ή
( ) ( )0 1 0 2 0n 2sin sin 2 1 22
a A A A ( )01 3 0
si sin 1 sin 3 1 3sV
μ ω θμ θ θ θ μ κλπ− = + + +
και εξισώνοντας τους συντελεστές των όρων με την ίδια τάξη:
μ θ μ+ + +
( ) 00 1 1 0 1 1
0
sin sin 11
a A A μμ θ θ μ
μ⎛ ⎞
= + ⇒ = ⎜ ⎟+⎝ ⎠ a
( )0 02 0 2
0
sin 2 sin 2 1 22 2(1V 2 )
s sA AV
μ ω μ ωθ θ μμ
⎛ ⎞= + ⇒ = ⎜ ⎟
⎠
+⎝( )3 00 sin 3 1 3A Aθ μ= + ⇒ 3 0= κλπ.
Οπότε η κυκλοφορία δίνεται από την σχέση:
[ ]1 24 sin sin 2sV A Aθ θΓ = +
αράδειγμα 3
Π (Σχεδίαση πτέρυγας για ελάχιστη αντίσταση) ητείται το περίγραμμα πτερυγίου ανοίγματος s, το οποίο παράγει ελάχιστη επαγόμενη ντίσταση για δεδομένη άνωσηΖα . Δίνεται ότι το πτερύγιο έχει συμμετρική αεροτομή (η εροτομή δεν έχει κυρτότητα), είναι τοποθετημένο σε γωνία σχετικά με την παράλληλη οή στο άπειρο, δεν έχει συστροφή και ότι
a α V ( )a y const∞ = ρ ανεξάρτητο του y.
1 Παρατηρήστε ότι η εξίσωση πτέρυγας ελλειπτικού περιγράμματος είναι:
2 2 22 2 2 2
max max max2 2 2max
1 (1 ) (1 cos )c y yc c c c cc s s
sinθ θ+ = ⇒ = − = − ⇒ =
39
Λύση Από την σχέση (44α) για να έχω ελάχιστο
vDC για δεδομένο LC , θα πρέπει δ=0.
Εξετάζοντας την σχέση για το δ: ...4322
24
22
+=AAAδ (παράγραφ1
21
3 +A
ος 7.2)
ρούμε ότι για να είναι μηδέν θα πρέπει
21
2 +AA
A A: 3 5 7 ... nA 0A= = = = =:
παρατη (τα Α2, Α4,... κλπ είναι μηδέν αφού η πτέρυγα είναι συμμετρι Ως εκ τούτου 14 sinsVAκή). θΓ = ή, επιστρέφοντας σε ανεξάρτητη μεταβλητή y (υπενθυμίζεται θcossy −= ):
2
14 1 ysVAΓ =
Η τελευταία σχέση έχει ήδη συζητηθεί στην παράγραφο 7. Θέτοντας 0753 ==== nAAAA , η ολοκληρωτική εξίσωση :
s⎛ ⎞− ⎜ ⎟⎝ ⎠
(55) γίνεται
( ) ⎟⎠⎞
⎜⎝⎛ +=−
θμθμ
sin1sin10 Aaa
ή: ( )0
1 sina a
Aμ
θ μ−
=+
(56)
η πτέρυγα έχει δεδομένο συντελεστή άνωσης το μπορεί να υπολογιστεί
την σχέση (42): LC , 1A
ARACL 1π=Εφόσοναπό . Άρα το είναι και σταθερό. Επιλύοντας την
σχέση (56) ως προς μ, έχουμε:
1A γνωστό
θμ sin1A0
1
aaA
−−= . Αλλά
2⎞⎛ y1sin ⎟⎠
⎜⎝
−s
, οπότε: =θ
2
10
1 1 ⎟⎠
⎜⎝⎛−
−−=
sy
aaA
Υπενθυμίζοντας ότι
⎞A
μ
(( ) c yyμ = ε στην σχέση) ( )8a ys∞ , καταλήγουμ :
21
0 1
8 1( )
sA yca a a A s∞
⎛ ⎞= − ⎜ ⎟− − ⎝ ⎠,
δηλαδή το περίγραμμα πρέπει να είναι ελλειπτικό του πτερυγίου θα . Να σημειωθεί ότι σύμφωνα με την εκφώνηση της άσκησης το πτερύγιο δεν έχει συστροφή. Επίσης έχει συμμετρικές αεροτομές. Σε περίπτωση που αυτές οι παράμετροι «αφεθούν ελεύθερες», τότε είναι δυνατόν να πετύχουμε ελαχιστοποίηση της επαγόμενης
πως είναι φανερό η αντίστασης επεμβαίνοντας και σ’αυτές εκτός από το περίγραμμα. Όολοκληρωτική εξίσωση του πτερυγίου (55) δε μπορεί να καθορίσει μονοσήμαντα όλες τις γεωμετρικές παραμέτρους του πτερυγίου, αλλά παρέχει ελευθερία να καθοριστούν με βάση άλλες σχεδιαστικές απαιτήσεις. Άλλωστε ένα από τα κύρια χαρακτηριστικά του προβλήματος υδροδυναμικής σχεδίασης (αντίστροφο πρόβλημα) είναι η απειρία των λύσεων.
40
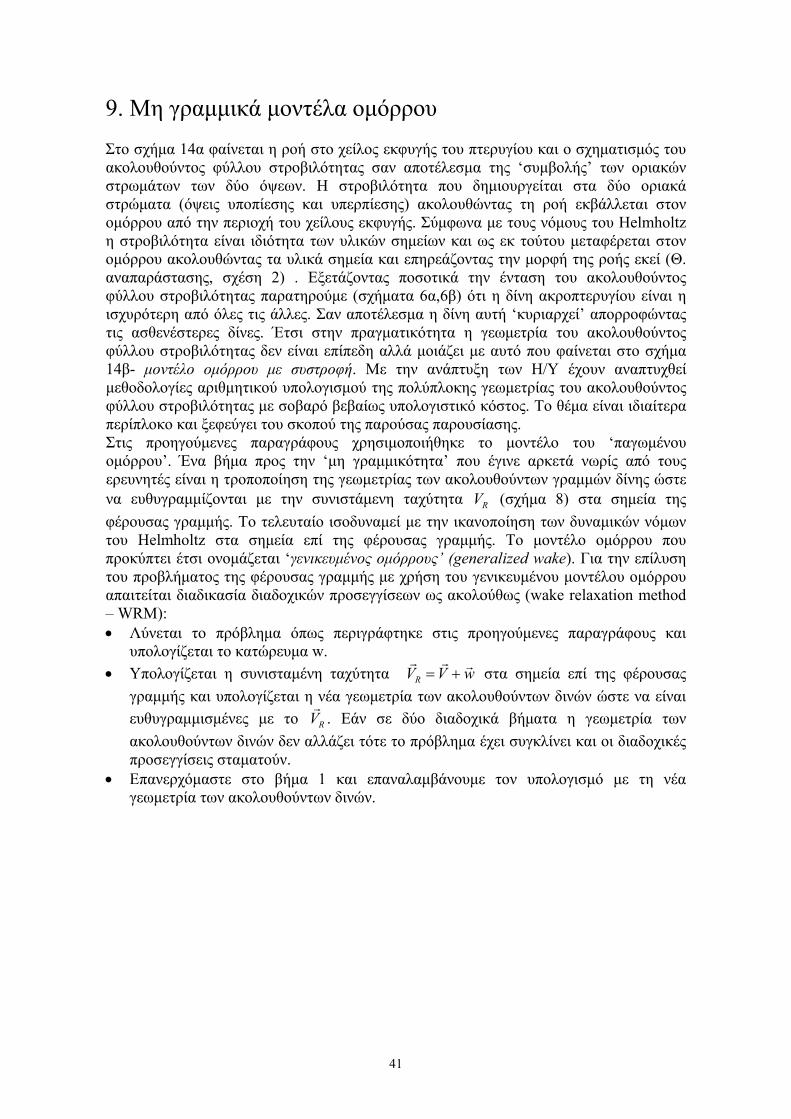
9. Μη γραμμικά μοντέλα ομόρρου Στο σχήμα 14α φαίνεται η ροή στο χείλος εκφυγής του πτερυγίου και ο σχηματισμός του κολουθούντος φύλλου στροβιλότητας σαν αποτέλεσμα της ‘συμβολής’ των οριακών τρωμάτων των δύο όψεων. Η στροβιλότητα που δημιουργείται στα δύο οριακά
ουθώντας τη ροή εκβάλλεται στον φωνα με τους νόμους του Helmholtz
στροβιλότητα είναι ιδιότητα των υλικών σημείων και ως εκ τούτου μεταφέρεται στον
λ
ασστρώματα (όψεις υποπίεσης και υπερπίεσης) ακολομόρρου από την περιοχή του χείλους εκφυγής. Σύμηομόρρου ακολουθώντας τα υλικά σημεία και επηρεάζοντας την μορφή της ροής εκεί (Θ. αναπαράστασης, σχέση 2) . Εξετάζοντας ποσοτικά την ένταση του ακολουθούντος φύλλου στροβιλότητας παρατηρούμε (σχήματα 6α,6β) ότι η δίνη ακροπτερυγίου είναι η ισχυρότερη από όλες τις άλλες. Σαν αποτέλεσμα η δίνη αυτή ‘κυριαρχεί’ απορροφώντας τις ασθενέστερες δίνες. Έτσι στην πραγματικότητα η γεωμετρία του ακολουθούντος φύλλου στροβιλότητας δεν είναι επίπεδη αλλά μοιάζει με αυτό που φαίνεται στο σχήμα 14β- μοντέλο ομόρρου με συστροφή. Με την ανάπτυξη των Η/Υ έχουν αναπτυχθεί μεθοδολογίες αριθμητικού υπολογισμού της πολύπλοκης γεωμετρίας του ακολουθούντος φύλλου στροβιλότητας με σοβαρό βεβαίως υπολογιστικό κόστος. Το θέμα είναι ιδιαίτερα περίπλοκο και ξεφεύγει του σκοπού της παρούσας παρουσίασης. Στις προηγούμενες παραγράφους χρησιμοποιήθηκε το μοντέλο του ‘παγωμένου ομόρρου’. Ένα βήμα προς την ‘μη γραμμικότητα’ που έγινε αρκετά νωρίς από τους ερευνητές είναι η τροποποίηση της γεωμετρίας των ακολουθούντων γραμμών δίνης ώστε να ευθυγραμμίζονται με την συνιστάμενη ταχύτητα RV (σχήμα 8) στα σημεία της φέρουσας γραμμής. Το τελευταίο ισοδυναμεί με την ικανοποίηση των δυναμικών νόμων του Helmholtz στα σημεία επί της φέρουσας γραμμής. Το μοντέ ο ομόρρου που προκύπτει έτσι ονομάζεται ‘γενικευμένος ομόρρους’ (generalized wake). Για την επίλυση του προβλήματος της φέρουσας γραμμής με χρήση του γενικευμένου μοντέλου ομόρρου απαιτείται διαδικασία διαδοχικών προσεγγίσεων ως ακολούθως (wake relaxation method – WRM): • Λύνεται το πρόβλημα όπως περιγράφτηκε στις προηγούμενες παραγράφους και
υπολογίζεται το κατώρευμα w. • Υπολογίζεται η συνισταμένη ταχύτητα RV V w= + στα σημεία επί της φέρουσας
γραμμής και υπολογίζεται η νέα γεωμετρία των ακολουθούντων δινών ώστε να είναι ευθυγραμμισμένες με το . Εάν σε δύο διαδοχικά βήματα η γεωμετρία των RVακολουθούντων δινών δεν αλλάζει τότε το πρόβλημα έχει συγκλίνει και οι διαδοχικές προσεγγίσεις σταματούν.
• Επανερχόμαστε στο βήμα 1 και επανα μβάνουμε τον υπολογισμό με τη νέα γεωμετρία των ακολουθούντων δινών.
λα
41
Σχήμα 14α. Ροή στο χείλος εκφυγής πτερυγίου, σχηματισμός του ακολουθούντος φύλλου στροβιλότητας σαν αποτέλεσμα της ‘συμβολής’ των οριακών στρωμάτων των δύο όψεων.
Σχήμα 14β. Ακολουθούν φύλλο στροβιλότητας με συστροφή (wake roll-up).
42
43
10. Βιβλιογραφία 1. Houghton & Brock, ‘Aerodynamics for Engineering Students’, Edward Arnold,
1972. 2. Milne-Thomson, ‘Theoretical Aerodynamics’, Dover Publications, 1958. 3. Van Dyke M. ‘Perturbation Methods in Fluid Mechanics’, The Parabolic Press,
Stanford, 1975. 4. Carlton J.S. ‘Marine Propellers and Propulsion’, Butterworth-Heinemann, 1994. 5. Πολίτη Γ.Κ., Σκαμνέλη Φ. ‘Ροές με Άνωση’, Σημειώσεις μαθήματος Ανωστικών
Ροών, Αθήνα 1999. Άσκηση Να αναπτυχθεί κώδικας Η/Υ για τη λύση του παραδείγματος 1 της παραγράφου 8.1. Τρέξτε το πρόγραμμα που αναπτύξατε κρατώντας 9, 11, 13, 15... όρους της σειράς για την κυκλοφορία. Ελέγξατε την σύγκλιση των αποτελεσμάτων του κώδικα. Τροποποιήστε τον κώδικα Η/Υ που αναπτύξατε ώστε να λαμβάνει υπ’ όψιν το μη γραμμικό μοντέλο ομόρρου (μοντέλο γενικευμένου ομόρρου) όπως περιγράφτηκε στην παράγραφο 9. Να γίνει σύγκριση των αποτελεσμάτων που θα προκύψουν από το μοντέλο ‘γενικευμένου ομόρρου’ με αυτά του ΄παγωμένου ομόρρου’ του προηγουμένου ερωτήματος.
ΜΕΘΟΔΟΛΟΓΙΑ ΣΧΕΔΙΑΣΗΣ ΓΙΑ ΥΠΟΣΠΗΛΑΙΟΥΜΕΝΕΣ ΝΑΥΤΙΚΕΣ
ΕΛΙΚΕΣ
Γ.Κ. Πολίτη, Αναπληρωτή Καθηγητή
ΠΕΡΙΕΧΟΜΕΝΑ 7 ΜΕΘΟΔΟΛΟΓΙΑ ΣΧΕΔΙΑΣΗΣ ΓΙΑ ΥΠΟΣΠΗΛΑΙΟΥΜΕΝΕΣ ΝΑΥΤΙΚΕΣ ΕΛΙΚΕΣ .............................................................................................................................................2
7.1 ΕΙΣΑΓΩΓΗ ................................................................................................................ 2 7.1.1 ΦΑΙΝΟΜΕΝΟΛΟΓΙΑ ΕΝΟΣ ΑΥΤΟΠΡΟΩΘΟΥΜΕΝΟΥ ΠΛΟΙΟΥ ............ 2 7.1.2 «ΑΝΑΓΩΓΗ» ΤΟΥ ΠΡΟΒΛΗΜΑΤΟΣ ΑΥΤΟΠΡΟΩΣΗΣ ΣΤΑ ΠΡΟΒΛΗΜΑΤΑ ΡΥΜΟΥΛΚΗΣΗΣ ΚΑΙ ΕΛΙΚΑΣ ΣΕ ΕΛΕΥΘΕΡΗ ΡΟΗ ................... 3
7.2 ΠΑΡΑΜΕΤΡΟΙ ΣΧΕΔΙΑΣΗΣ, ΚΡΙΤΗΡΙΑ ΣΧΕΔΙΑΣΗΣ ΚΑΙ ΠΡΑΚΤΙΚΕΣ ΠΑΡΑΤΗΡΗΣΕΙΣ .................................................................................................................. 7
7.2.1 ΠΑΡΑΜΕΤΡΟΙ ΣΧΕΔΙΑΣΗΣ ........................................................................... 7 7.2.2 ΑΠΑΙΤΗΣΕΙΣ ΣΧΕΔΙΑΣΗΣ ............................................................................. 9 7.2.3 ΣΥΣΧΕΤΙΣΜΟΣ ΤΩΝ ΠΑΡΑΜΕΤΡΩΝ ΜΟΡΦΗΣ ΤΗΣ ΕΛΙΚΑΣ ΜΕ ΤΙΣ ΑΠΑΙΤΗΣΕΙΣ ΣΧΕΔΙΑΣΗΣ ........................................................................................... 10 7.2.4 ΕΠΙΛΟΓΗ ΤΩΝ ΓΕΩΜΕΤΡΙΚΩΝ ΠΑΡΑΜΕΤΡΩΝ ΣΧΕΔΙΑΣΗΣ .............. 13
7.3 ΚΑΛΩΣ - ΤΕΘΕΙΜΕΝΑ ΠΡΟΒΛΗΜΑΤΑ ΠΡΟΩΣΗΣ ....................................... 15 7.4 ΠΑΡΑΔΕΙΓΜΑΤΑ ΣΧΕΔΙΑΣΗΣ ΜΕ ΧΡΗΣΗ ΜΕΘΟΔΙΚΩΝ ΣΕΙΡΩΝ .............. 18
7.4.1 ΠΡΟΒΛΗΜΑΤΑ ΣΧΕΔΙΑΣΗΣ ΕΛΙΚΑΣ ΓΙΑ ΣΥΜΒΑΤΙΚΑ ΠΛΟΙΑ ......... 18 7.4.2 ΠΡΟΒΛΗΜΑΤΑ ΣΧΕΔΙΑΣΗΣ ΕΛΙΚΩΝ ΓΙΑ ΡΥΜΟΥΛΚΑ ΚΑΙ ΑΛΙΕΥΤΙΚΑ .................................................................................................................... 23 7.4.3 ΠΡΟΒΛΗΜΑΤΑ ΜΕ ΠΟΛΛΑΠΛΑ ΣΗΜΕΙΑ ΣΧΕΔΙΑΣΗΣ ....................... 27
7.5 ΑΝΑΛΥΤΙΚΕΣ ΜΕΘΟΔΟΙ ΣΤΗΝ ΣΧΕΔΙΑΣΗ ΕΛΙΚΩΝ .................................... 29 7.5.1 ΘΕΩΡΙΕΣ ΦΕΡΟΥΣΑΣ ΓΡΑΜΜΗΣ ΚΑΙ ΦΕΡΟΥΣΑΣ ΕΠΙΦΑΝΕΙΑΣ ....... 29 7.5.2 ΣΧΕΔΙΑΣΗ ΕΛΙΚΑΣ ΧΡΗΣΙΜΟΠΟΙΩΝΤΑΣ ΤΙΣ ΘΕΩΡΙΕΣ ΦΕΡΟΥΣΑΣ ΓΡΑΜΜΗΣ ΚΑΙ ΦΕΡΟΥΣΑΣ ΕΠΙΦΑΝΕΙΑΣ ............................................................... 32 7.5.3 Η ΜΕΘΟΔΟΣ ΣΥΝΟΡΙΑΚΩΝ ΣΤΟΙΧΕΙΩΝ ΓΙΑ ΤΑ ΜΟΝΙΜΑ ΚΑΙ ΤΑ ΜΗ ΜΟΝΙΜΑ ΠΡΟΒΛΗΜΑΤΑ ΑΝΑΛΥΣΗΣ ΤΩΝ ΕΛΙΚΩΝ ........................................... 37
7.6 ΒΙΒΛΙΟΓΡΑΦΙΑ...................................................................................................... 44
1
ΜΕΘΟΔΟΛΟΓΙΑ ΣΧΕΔΙΑΣΗΣ ΓΙΑ ΥΠΟΣΠΗΛΑΙΟΥΜΕΝΕΣ ΝΑΥΤΙΚΕΣ ΕΛΙΚΕΣ
1 ΕΙΣΑΓΩΓΗ
Βέλτιστη σχεδίαση προωστήρα σημαίνει επιλογή ενός συνόλου στοιχείων (γεωμετρία έλικας, πρυμναίων γραμμών γάστρας, γεωμετρία πηδαλίου και σχετικές θέσεις έλικας – πηδαλίου – γάστρας) με τέτοιον τρόπο, ώστε να προωθείται ένα πλοίο με το μέγιστο (ή κοντά στο μέγιστο) βαθμό απόδοσης αλλά να ικανοποιούνται παράλληλα και άλλες απαιτήσεις, όπως η ελαχιστοποίηση των κραδασμών, η ελεγχόμενη ανάπτυξη της σπηλαίωσης και η αξιοπιστία της κατασκευής. Έτσι το πρόβλημα της σχεδίασης του προωστήρα είναι στην πραγματικότητα ένα σύνθετο πρόβλημα αλληλεπίδρασης των συνεκτικών (viscous) ροών γύρω από την έλικα, το πηδάλιο και τη γάστρα. Αυτό το πρόβλημα ακόμα και σήμερα είναι ένα από τα πιο δύσκολα που πρέπει να αντιμετωπιστούν στα πλαίσια της υπολογιστικής ρευστομηχανικής (computational fluid dynamics –CFD). Από την άλλη μεριά, εδώ και πολύ καιρό, οι δεξαμενές δοκιμών και οι ερευνητές έχουν αναπτύξει δικές τους λύσεις «ευρηματικού» (heuristic) τύπου, βασιζόμενοι σε ένα συνδυασμό πειραματικών αποτελεσμάτων (πειράματα στην δεξαμενή δοκιμών) και αριθμητικών/αναλυτικών μεθόδων. Στην συνέχεια θα γίνει προσπάθεια να παρουσιαστεί το πρόβλημα της σχεδίασης του προωστήρα σε σταδιακά αυξανόμενη περιπλοκότητα, δείχνοντας ότι σε μια μοντέρνα σχεδίαση όλα τα εργαλεία, από τις συστηματικές σειρές μέχρι τις πολύπλοκες τεχνικές CFD όπως οι θεωρίες φέρουσας γραμμής/επιφάνειας (lifting line/surface) και οι μέθοδοι συνοριακών στοιχείων (panel methods), πρέπει να συνυπάρξουν για να δώσουν το επιθυμητό αποτέλεσμα.
Στις ακόλουθες παραγράφους γίνεται αρχικά μια μικρή εισαγωγή στο φαινόμενο του αυτοπροωθούμενου πλοίου (self-propulsion) και την σχετική ορολογία. Υποθέτουμε ότι ο αναγνώστης έχει ήδη κάποια γνώση πάνω σε θέματα πρόωσης πλοίου, πχ. από το ΡΝΑ[1].
1.1 ΦΑΙΝΟΜΕΝΟΛΟΓΙΑ ΕΝΟΣ ΑΥΤΟΠΡΟΩΘΟΥΜΕΝΟΥ ΠΛΟΙΟΥ
Το σχήμα 7.1 δείχνει το σύστημα πρόωσης ενός αυτοπροωθούμενου (self-propelled) πλοίου μαζί με τις διάφορες φυσικές ποσότητες που σχετίζονται με αυτό. Ειδικότερα:
Έστω ένα αυτοπροωθούμενο πλοίο που ταξιδεύει με ταχύτητα Vs. Η κύρια μηχανή παρέχει την απαιτούμενη ιπποδύναμη άξονα SHPe (shaft horsepower) σε στροφές μηχανής Ne (engine revolutions). Ο μειωτήρας (reduction gear) αλλάζει τις στροφές της μηχανής σε στροφές έλικας κατά έναν λόγο που συμβολίζεται με rg, με πολύ μικρό ποσοστό ενεργειακών απωλειών (συνήθως της τάξης του 1%). Έστω SHP η ισχύς άξονα μετά το μειωτήρα και n οι στροφές της έλικας (n=Ne/rg). Η SHP μεταφέρεται στη συνέχεια μέσω του άξονα στη θέση της έλικας με μια απώλεια ενέργειας λόγω της ύπαρξης των εδράνων που εκφράζεται με τον βαθμό απόδοσης άξονα ηs (shaft efficiency). Έστω DHP η αποδιδόμενη ισχύς στην έλικα από τον άξονα (delivered horsepower), οπότε ηs=DHP/SHP. Καθώς η έλικα δρα σαν μετασχηματιστής της ενέργειας, παράγεται από αυτήν μια ισχύς πρόωσης (thrust power) που συμβολίζεται με THP=VATB και η οποία προωθεί το πλοίο με μια ταχύτητα Vs. Με VA συμβολίζεται η μέση ταχύτητα πραγματικού ομόρρου (mean effective wake velocity) στο δίσκο της έλικας και με ΤΒ η ώση (thrust) που παράγεται από την έλικα κατά τη λειτουργία
2
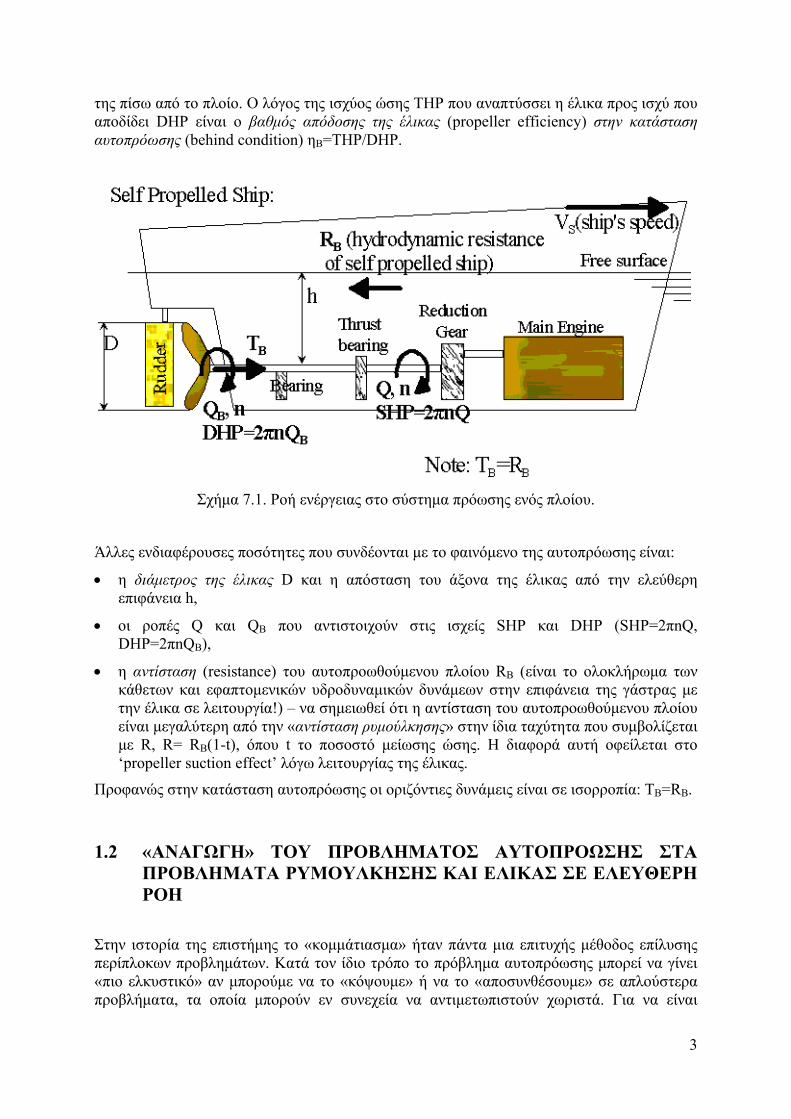
της πίσω από το πλοίο. Ο λόγος της ισχύος ώσης ΤΗΡ που αναπτύσσει η έλικα προς ισχύ που αποδίδει DHP είναι ο βαθμός απόδοσης της έλικας (propeller efficiency) στην κατάσταση αυτοπρόωσης (behind condition) ηB=THP/DHP.
Σχήμα 7.1. Ροή ενέργειας στο σύστημα πρόωσης ενός πλοίου.
Άλλες ενδιαφέρουσες ποσότητες που συνδέονται με το φαινόμενο της αυτοπρόωσης είναι:
• η διάμετρος της έλικας D και η απόσταση του άξονα της έλικας από την ελεύθερη επιφάνεια h,
• οι ροπές Q και QB που αντιστοιχούν στις ισχείς SHP και DHP (SHP=2πnQ, DHP=2πnQB),
• η αντίσταση (resistance) του αυτοπροωθούμενου πλοίου RB (είναι το ολοκλήρωμα των κάθετων και εφαπτομενικών υδροδυναμικών δυνάμεων στην επιφάνεια της γάστρας με την έλικα σε λειτουργία!) – να σημειωθεί ότι η αντίσταση του αυτοπροωθούμενου πλοίου είναι μεγαλύτερη από την «αντίσταση ρυμούλκησης» στην ίδια ταχύτητα που συμβολίζεται με R, R= RB(1-t), όπου t το ποσοστό μείωσης ώσης. Η διαφορά αυτή οφείλεται στο ‘propeller suction effect’ λόγω λειτουργίας της έλικας.
Προφανώς στην κατάσταση αυτοπρόωσης οι οριζόντιες δυνάμεις είναι σε ισορροπία: TB=RB.
1.2 «ΑΝΑΓΩΓΗ» ΤΟΥ ΠΡΟΒΛΗΜΑΤΟΣ ΑΥΤΟΠΡΟΩΣΗΣ ΣΤΑ ΠΡΟΒΛΗΜΑΤΑ ΡΥΜΟΥΛΚΗΣΗΣ ΚΑΙ ΕΛΙΚΑΣ ΣΕ ΕΛΕΥΘΕΡΗ ΡΟΗ
Στην ιστορία της επιστήμης το «κομμάτιασμα» ήταν πάντα μια επιτυχής μέθοδος επίλυσης περίπλοκων προβλημάτων. Κατά τον ίδιο τρόπο το πρόβλημα αυτοπρόωσης μπορεί να γίνει «πιο ελκυστικό» αν μπορούμε να το «κόψουμε» ή να το «αποσυνθέσουμε» σε απλούστερα προβλήματα, τα οποία μπορούν εν συνεχεία να αντιμετωπιστούν χωριστά. Για να είναι
3
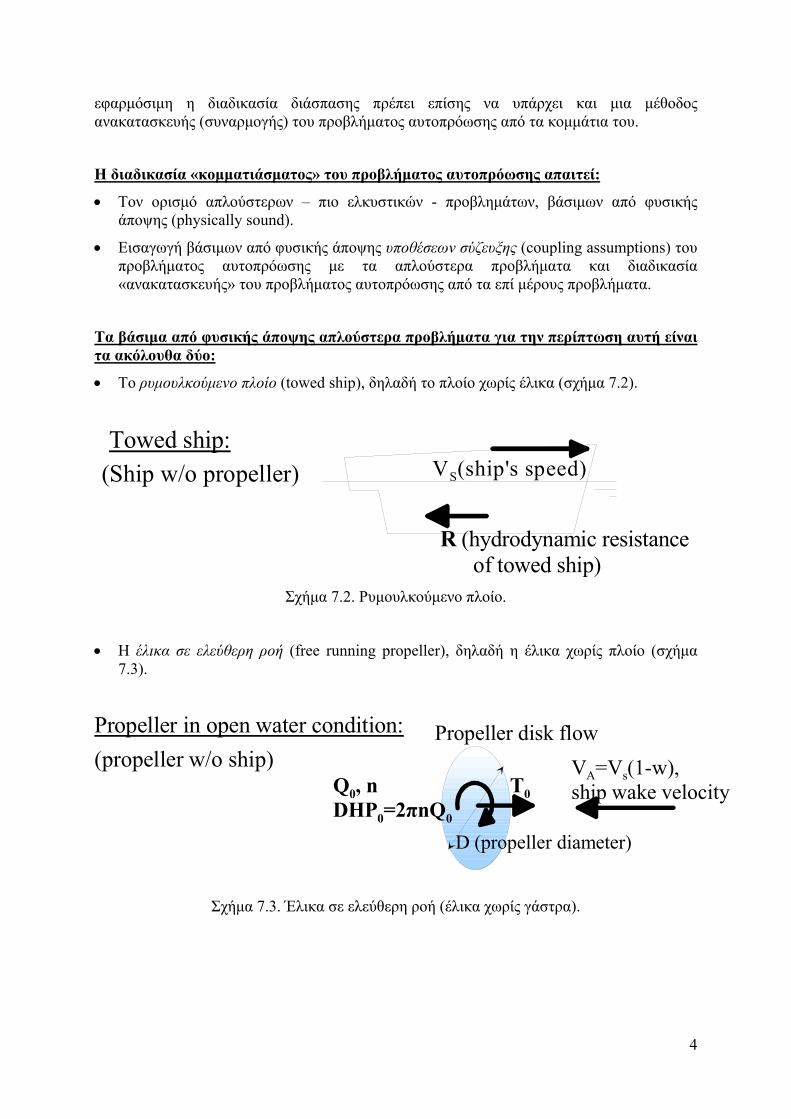
εφαρμόσιμη η διαδικασία διάσπασης πρέπει επίσης να υπάρχει και μια μέθοδος ανακατασκευής (συναρμογής) του προβλήματος αυτοπρόωσης από τα κομμάτια του.
Η διαδικασία «κομματιάσματος» του προβλήματος αυτοπρόωσης απαιτεί:
• Τον ορισμό απλούστερων – πιο ελκυστικών - προβλημάτων, βάσιμων από φυσικής άποψης (physically sound).
• Εισαγωγή βάσιμων από φυσικής άποψης υποθέσεων σύζευξης (coupling assumptions) του προβλήματος αυτοπρόωσης με τα απλούστερα προβλήματα και διαδικασία «ανακατασκευής» του προβλήματος αυτοπρόωσης από τα επί μέρους προβλήματα.
Τα βάσιμα από φυσικής άποψης απλούστερα προβλήματα για την περίπτωση αυτή είναι τα ακόλουθα δύο:
• Το ρυμουλκούμενο πλοίο (towed ship), δηλαδή το πλοίο χωρίς έλικα (σχήμα 7.2).
(Ship w/o propeller) VS(ship's speed)
R (hydrodynamic resistance of towed ship)
Towed ship:
Σχήμα 7.2. Ρυμουλκούμενο πλοίο.
• Η έλικα σε ελεύθερη ροή (free running propeller), δηλαδή η έλικα χωρίς πλοίο (σχήμα 7.3).
Propeller disk flowVA=Vs(1-w), ship wake velocity
Propeller in open water condition:(propeller w/o ship)
D (propeller diameter)
T0Q0, nDHP0=2πnQ0
Σχήμα 7.3. Έλικα σε ελεύθερη ροή (έλικα χωρίς γάστρα).
4
Οι υποθέσεις σύζευξης είναι (για λεπτομέρειες μπορεί κανείς να ανατρέξει στο ΡΝΑ[1]):
• Σύζευξη του προβλήματος αυτοπρόωσης με το πρόβλημα ρυμούλκησης της γάστρας (hull towing problem):
R=RB(1-t)1, ορισμός του συντελεστή μείωσης ώσης t (thrust deduction factor), όπου:
με R συμβολίζεται η αντίσταση ρυμούλκησης της γάστρας (hull towing resistance), δηλαδή της γάστρας χωρίς προωστήρα, σε ταχύτητα Vs και με RB συμβολίζεται η αντίσταση αυτοπρόωσης (self-propulsion resistance) σε ταχύτητα Vs (υπενθυμίζουμε ότι ισχύει RB=TB, σχήμα 7.1).
• Σύζευξη του προβλήματος αυτοπρόωσης με το πρόβλημα της έλικας σε ελεύθερη ροή (open water propeller problem) – για τη σύζευξη αυτή υπάρχουν δύο προτάσεις:
1η πρόταση:
ΚΤΒ=ΚΤ0, μέθοδος εξίσωσης ώσης (thrust equalization method), όπου:
τα ΚΤΒ, ΚΤ0 συμβολίζουν τους συντελεστές ώσης της έλικας (propeller thrust coefficients) στις καταστάσεις αυτοπρόωσης και ελεύθερης ροής, αντίστοιχα (ΚΤΒ=ΤΒ/(ρn2D4), ΚΤ0=Τ0/(ρn2D4)).
Επιπλέον:
VA=Vs(1-w), ορισμός του πραγματικού ποσοστού ομόρρου w (effective wake fraction),
ηR=ηB/η0=Q0/QB, ορισμός του βαθμού απόδοσης σχετικής περιστροφής (relative rotative efficiency), όπου:
με T0, Q0 συμβολίζονται η ώση και η ροπή της έλικας σε ελεύθερη ροή, με TB,QΒ συμβολίζονται η ώση και η ροπή της έλικας πίσω από το πλοίο (αυτοπρόωση) και VA είναι η ταχύτητα πραγματικού ομόρρου (effective wake velocity) που προκύπτει από την εξίσωση ώσης.
2η πρόταση:
ΚQΒ=ΚQ0, μέθοδος εξίσωσης ροπής (torque equalization method), όπου:
τα ΚQΒ, ΚQ0 συμβολίζουν τους συντελεστές ροπής της έλικας (propeller torque coefficients) στις καταστάσεις αυτοπρόωσης και ελεύθερης ροής, αντίστοιχα (ΚQΒ=QΒ/(ρn2D5), ΚQ0=Q0/(ρn2D5)).
Επιπλέον:
VA=Vs(1-w), ορισμός του πραγματικού ποσοστού ομόρρου,
ηR=ηB/η0=T0/TB, ορισμός ενός βαθμού απόδοσης αντιστοίχου προς τον βαθμό απόδοσης σχετικής περιστροφής.
1 Για τον υπολογισμό του ποσοστού μείωσης ώσης από πειράματα σε μοντέλο η σχέση αυτή αντικαθίσταται από την R=RB(1-t)+DF όπου DF είναι η πρόσθετη δύναμη ρυμούλκησης (additional towing-force) εξαιτίας της διαφοράς του αριθμού Reynolds μεταξύ της κλίμακας μοντέλου (model scale) και της φυσικής κλίμακας (full scale).
5
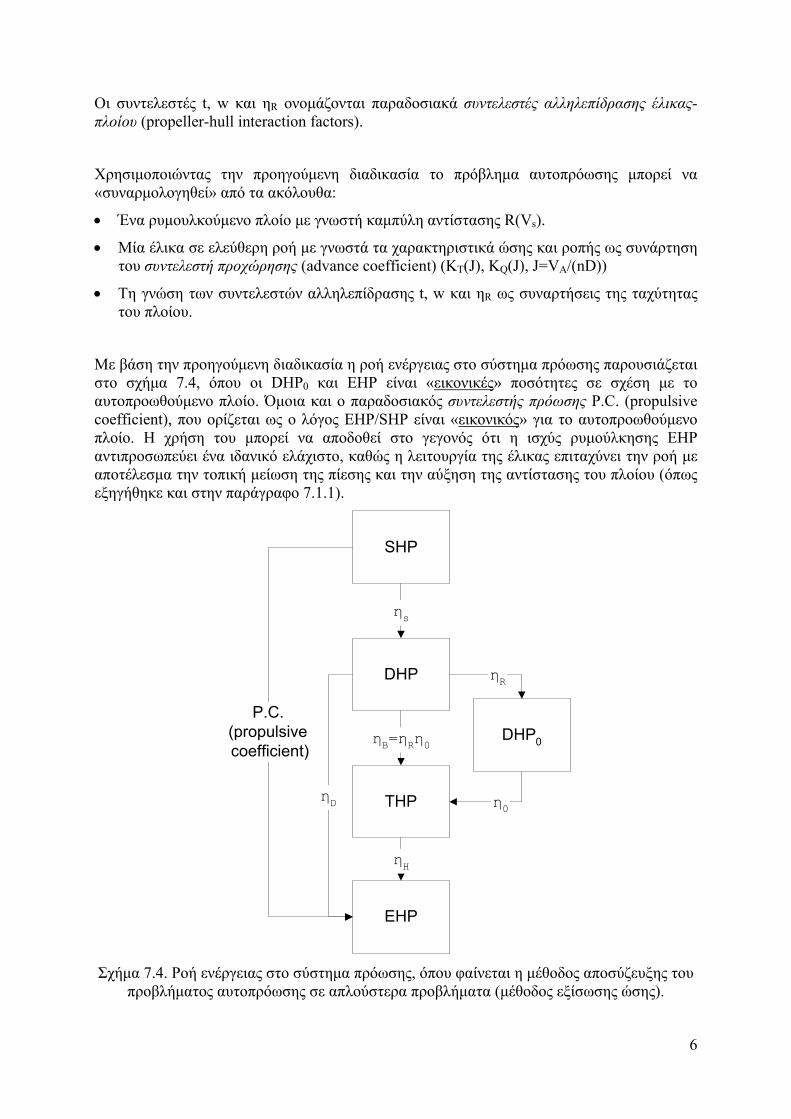
Οι συντελεστές t, w και ηR ονομάζονται παραδοσιακά συντελεστές αλληλεπίδρασης έλικας-πλοίου (propeller-hull interaction factors).
Χρησιμοποιώντας την προηγούμενη διαδικασία το πρόβλημα αυτοπρόωσης μπορεί να «συναρμολογηθεί» από τα ακόλουθα:
• Ένα ρυμουλκούμενο πλοίο με γνωστή καμπύλη αντίστασης R(Vs).
• Μία έλικα σε ελεύθερη ροή με γνωστά τα χαρακτηριστικά ώσης και ροπής ως συνάρτηση του συντελεστή προχώρησης (advance coefficient) (KT(J), KQ(J), J=VA/(nD))
• Τη γνώση των συντελεστών αλληλεπίδρασης t, w και ηR ως συναρτήσεις της ταχύτητας του πλοίου.
Με βάση την προηγούμενη διαδικασία η ροή ενέργειας στο σύστημα πρόωσης παρουσιάζεται στο σχήμα 7.4, όπου οι DHP0 και EHP είναι «εικονικές» ποσότητες σε σχέση με το αυτοπροωθούμενο πλοίο. Όμοια και ο παραδοσιακός συντελεστής πρόωσης P.C. (propulsive coefficient), που ορίζεται ως ο λόγος EHP/SHP είναι «εικονικός» για το αυτοπροωθούμενο πλοίο. Η χρήση του μπορεί να αποδοθεί στο γεγονός ότι η ισχύς ρυμούλκησης ΕΗΡ αντιπροσωπεύει ένα ιδανικό ελάχιστο, καθώς η λειτουργία της έλικας επιταχύνει την ροή με αποτέλεσμα την τοπική μείωση της πίεσης και την αύξηση της αντίστασης του πλοίου (όπως εξηγήθηκε και στην παράγραφο 7.1.1).
SHP
DHP
THP
EHP
ηs
ηB=ηRη0
ηH
DHP0
ηR
η0ηD
P.C.(propulsive coefficient)
Σχήμα 7.4. Ροή ενέργειας στο σύστημα πρόωσης, όπου φαίνεται η μέθοδος αποσύζευξης του
προβλήματος αυτοπρόωσης σε απλούστερα προβλήματα (μέθοδος εξίσωσης ώσης).
6
Στην συνέχεια παρουσιάζεται μια λίστα από χρήσιμους τύπους (υποτίθεται η χρήση της μεθόδου εξίσωσης ώσης ως μεθόδου αποσύζευξης - σύζευξης):
SHP=2πQn, DHP=2πQBn, ηs=DHP/SHP
Υποθέτοντας την μέθοδο εξίσωσης ώσης: Τ0=ΤΒ=Τ και ΤΗΡ0=ΤΗΡΒ=ΤΗΡ (Σημείωση: ο δείκτης 0 χρησιμοποιείται για να δηλώσει μεγέθη της έλικας σε ελεύθερη ροή ενώ ο δείκτης Β χρησιμοποιείται για να δηλώσει μεγέθη του αυτοπροωθούμενου πλοίου).
THP=VAT,
DHP0=2πQ0n,
η0=THP/DHP0: βαθμός απόδοσης της έλικας σε ελεύθερη ροή (open water propeller efficiency)
ηR=DHP0/DHP=Q0/QB: βαθμός απόδοσης σχετικής περιστροφής (υποτίθεται η μέθοδος εξίσωσης ώσης)
ηΒ=THP/DHP=η0ηR: βαθμός απόδοσης της έλικας στην κατάσταση αυτοπρόωσης, δηλαδή πίσω από το πλοίο (self propulsion propeller efficiency)
ΕΗΡ=RVs: ισχύς ρυμούλκησης (towing power, effective power),
11
AH
S
V TTHP tEHP RV w
η −= = =
−: βαθμός απόδοσης γάστρας (hull efficiency)
ηD=DHP/EHP=η0ηRηs: βαθμός απόδοσης έλικας-πλοίου (propeller-hull efficiency)
P.C.=EHP/SHP=ηHη0ηRηs: συντελεστής πρόωσης (propulsive coefficient).
2 ΠΑΡΑΜΕΤΡΟΙ ΣΧΕΔΙΑΣΗΣ, ΚΡΙΤΗΡΙΑ ΣΧΕΔΙΑΣΗΣ ΚΑΙ ΠΡΑΚΤΙΚΕΣ ΠΑΡΑΤΗΡΗΣΕΙΣ
2.1 ΠΑΡΑΜΕΤΡΟΙ ΣΧΕΔΙΑΣΗΣ
Η κατάσταση (state) ενός προωστήρα χαρακτηρίζεται από διάφορες γεωμετρικές, υδροδυναμικές και υλικές παραμέτρους, ως ακολούθως:
1. Γεωμετρικές παράμετροι έλικας ή παράμετροι μορφής
• Διάμετροι ακροπτερυγίου και πλήμνης (propeller tip and hub diameters)
• Κατανομές της πλευρικής απόκλισης (skew), της διαμήκους απόκλισης (rake) και των χορδών (chords). Ορίζεται έτσι το περίγραμμα πτερυγίου έλικας (propeller blade outline)
7
• Κατανομές βήματος και κυρτότητας σχεδίασης έλικας (propeller design pitch and camber distributions)
• Κατανομή πάχους έλικας (propeller thickness distribution)
• Αριθμός πτερυγίων (number of blades)
2. Υδροδυναμικές παράμετροι έλικας • Στροφές έλικας (propeller revolutions)
• Ταχύτητα πλοίου (ship’s speed)
• Συντελεστές αλληλεπίδρασης έλικας-πλοίου, δηλ. το πραγματικό ποσοστό ομόρρου w (μέση τιμή και ακτινική κατανομή), ο συντελεστής μείωσης ώσης t και ο βαθμός απόδοσης σχετικής περιστροφής ηR
3. Παράμετροι που σχετίζονται με το υλικό της έλικας
• Για συμβατικά μεταλλικά πτερύγια το μέτρο ελαστικότητας του Young (Young modulus) και το όριο διαρροής (yield strength)
• Για τις μοντέρνες έλικες από FRP:
Τύπος κατασκευής, πχ. ενιαίος (monolithic), με στρώσεις (sandwich), με στρώσεις και εσωτερικές ενισχυτικές ράβδους (sandwich with internal reinforcing spars).
Ακτινική και χορδική κατανομή ακαμψίας (stiffness) (μηχανικές ιδιότητες του σύνθετου συστήματος, αριθμός, κατανομή και προσανατολισμός των στρωμάτων (layers), ορισμός των διευθύνσεων των ράβδων)
Στην περίπτωση εξειδικευμένων συστημάτων πρόωσης, μπορεί να εισάγονται επίσης και άλλες παράμετροι. Για παράδειγμα στην περίπτωση της έλικας σε δακτύλιο (ducted propeller) η γεωμετρία του δακτυλίου πρέπει να μπει στη λίστα των παραμέτρων. Έτσι εμφανίζονται οι ακόλουθες επί πλέον γεωμετρικές παράμετροι:
• λόγος χορδής προς διάμετρο δακτυλίου,
• τύπος δακτυλίου σε σχέση με τη ροή, δηλαδή συμμετρικός (symmetric), ασύμμετρος (asymmetric), επιταχυντικός (accelerating), επιβραδυντικός (decelerating), μεικτός,
• κατανομές πάχους και κυρτότητας δακτυλίου,
• μέγεθος κενού μεταξύ του δακτυλίου και του ακροπτερυγίου της έλικας κτλ.
Η σχεδίαση ενός προωστήρα σημαίνει την επιλογή όλων των παραπάνω παραμέτρων με τέτοιον τρόπο ώστε να ικανοποιούνται διάφορα κριτήρια σχεδίασης (design criteria) ή απαιτήσεις (requirements).
8
2.2 ΑΠΑΙΤΗΣΕΙΣ ΣΧΕΔΙΑΣΗΣ
Όσον αφορά τις απαιτήσεις σχεδίασης, αυτές μπορούν να διαχωριστούν σε δύο διαφορετικές κατηγορίες ως εξής:
1. Απαιτήσεις πρόωσης (propulsive performance), για παράδειγμα:
• Ελαχιστοποίηση της απαιτούμενης ισχύος σε μια δεδομένη ταχύτητα ελεύθερης πλεύσης του πλοίου ή μεγιστοποίηση της ταχύτητας του πλοίου σε μια δεδομένη SHP.
• Ελαχιστοποίηση της απαιτούμενης ισχύος για δεδομένη δύναμη έλξης (towing force), όπως στην περίπτωση ενός ρυμουλκού (tugboat) ή αλιευτικού (trawler) σε μια συνήθως χαμηλή ταχύτητα πλοίου (towing condition) ή μεγιστοποίηση της δύναμης έλξης για μια δεδομένη SHP.
• Συμβιβαστική βελτιστοποίηση διαφορετικών κριτηρίων μεταξύ δύο ή περισσοτέρων καταστάσεων, συμβιβαστική επιλογή του βήματος σχεδίασης.
2. Άλλες απαιτήσεις: • Ελαχιστοποίηση των μη μόνιμων διεγέρσεων από τον προωστήρα (propulsor unsteady
excitations) (άξονας έλικας και δυνάμεις γάστρας) σε ένα εύρος συνθηκών λειτουργίας του πλοίου, ελαχιστοποίηση θορύβου.
• Ελαχιστοποίηση της διάβρωσης λόγω σπηλαίωσης.
• Επαρκής αντοχή και αντοχή σε κόπωση (αξιοπιστία κατασκευής – structural reliability) με ελαχιστοποίηση του υλικού και του κόστους κατασκευής/παραγωγής.
• Άλλες απαιτήσεις που σχετίζονται με ειδικού τύπου προωστήρες, για παράδειγμα ελαχιστοποίηση της ροπής στροφής σε όλη την περιοχή λειτουργίας μιας έλικας μεταβλητού βήματος.
Οι παραπάνω απαιτήσεις οδηγούν σε ένα κακώς τεθειμένο (ill-posed) πρόβλημα (σχεδίασης) από μαθηματικής απόψεως, δηλαδή υπάρχουν συνήθως ‘περισσότερες από μία’ λύσεις (συγκεκριμένα υπάρχουν άπειρες λύσεις).
Η εξαγωγή μιας μοναδικής λύσης είναι μια τέχνη, στην οποία η γνώση της σχετικής σημασίας των διάφορων φυσικών μηχανισμών που μπαίνουν στο παιχνίδι, η διαίσθηση (εμπειρία) του μηχανικού (engineering intuition/experience) και η διαδικασία διαδοχικών δοκιμών-λαθών (trial and error) είναι σχεδόν πάντα απαραίτητα.
Ευτυχώς οι διάφορες απαιτήσεις σχεδίασης επηρεάζουν σε διαφορετικό βαθμό τις παραμέτρους κατάστασης του προωστήρα (propulsor state parameters) και έτσι διευκολύνεται η επινόηση ευρηματικών προσεγγίσεων για τον σχεδιασμό περίπλοκων συστημάτων πρόωσης.
9
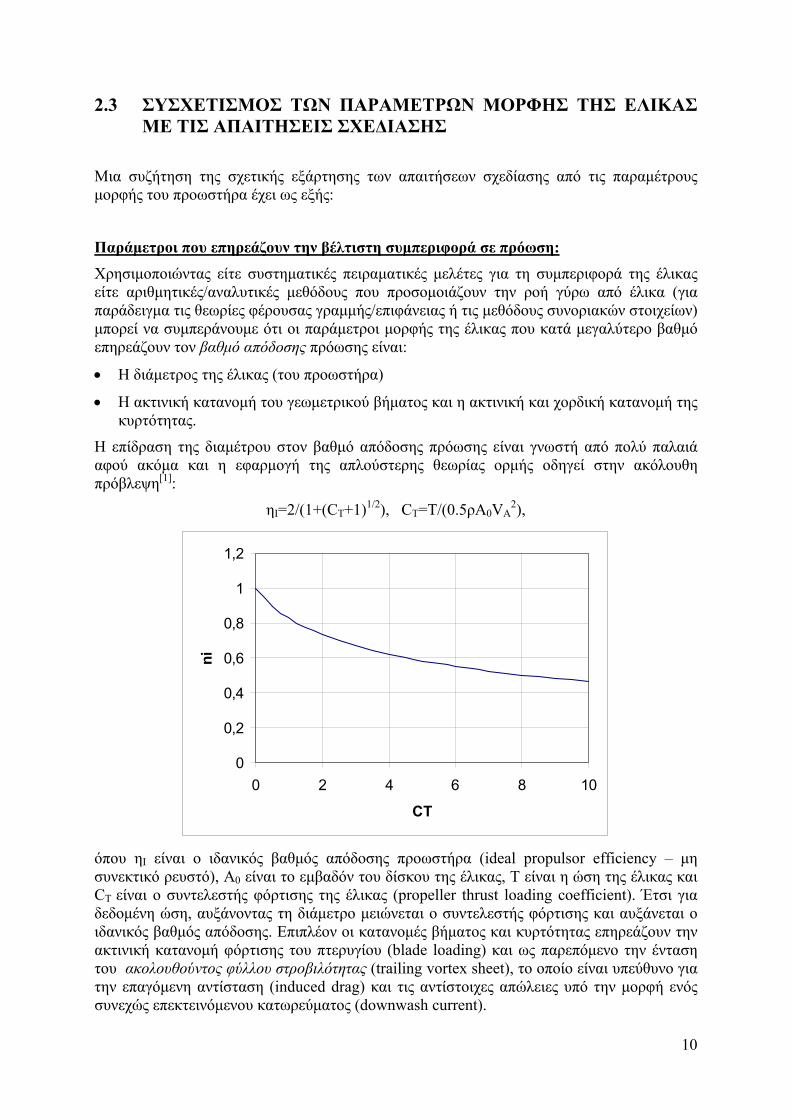
2.3 ΣΥΣΧΕΤΙΣΜΟΣ ΤΩΝ ΠΑΡΑΜΕΤΡΩΝ ΜΟΡΦΗΣ ΤΗΣ ΕΛΙΚΑΣ ΜΕ ΤΙΣ ΑΠΑΙΤΗΣΕΙΣ ΣΧΕΔΙΑΣΗΣ
Μια συζήτηση της σχετικής εξάρτησης των απαιτήσεων σχεδίασης από τις παραμέτρους μορφής του προωστήρα έχει ως εξής:
Παράμετροι που επηρεάζουν την βέλτιστη συμπεριφορά σε πρόωση: Χρησιμοποιώντας είτε συστηματικές πειραματικές μελέτες για τη συμπεριφορά της έλικας είτε αριθμητικές/αναλυτικές μεθόδους που προσομοιάζουν την ροή γύρω από έλικα (για παράδειγμα τις θεωρίες φέρουσας γραμμής/επιφάνειας ή τις μεθόδους συνοριακών στοιχείων) μπορεί να συμπεράνουμε ότι οι παράμετροι μορφής της έλικας που κατά μεγαλύτερο βαθμό επηρεάζουν τον βαθμό απόδοσης πρόωσης είναι:
• Η διάμετρος της έλικας (του προωστήρα)
• Η ακτινική κατανομή του γεωμετρικού βήματος και η ακτινική και χορδική κατανομή της κυρτότητας.
Η επίδραση της διαμέτρου στον βαθμό απόδοσης πρόωσης είναι γνωστή από πολύ παλαιά αφού ακόμα και η εφαρμογή της απλούστερης θεωρίας ορμής οδηγεί στην ακόλουθη πρόβλεψη[1]:
ηΙ=2/(1+(CT+1)1/2), CT=T/(0.5ρΑ0VA2),
0
0,2
0,4
0,6
0,8
1
1,2
0 2 4 6 8 1
CT
ni
0
όπου ηΙ είναι ο ιδανικός βαθμός απόδοσης προωστήρα (ideal propulsor efficiency – μη συνεκτικό ρευστό), Α0 είναι το εμβαδόν του δίσκου της έλικας, Τ είναι η ώση της έλικας και CT είναι ο συντελεστής φόρτισης της έλικας (propeller thrust loading coefficient). Έτσι για δεδομένη ώση, αυξάνοντας τη διάμετρο μειώνεται ο συντελεστής φόρτισης και αυξάνεται ο ιδανικός βαθμός απόδοσης. Επιπλέον οι κατανομές βήματος και κυρτότητας επηρεάζουν την ακτινική κατανομή φόρτισης του πτερυγίου (blade loading) και ως παρεπόμενο την ένταση του ακολουθούντος φύλλου στροβιλότητας (trailing vortex sheet), το οποίο είναι υπεύθυνο για την επαγόμενη αντίσταση (induced drag) και τις αντίστοιχες απώλειες υπό την μορφή ενός συνεχώς επεκτεινόμενου κατωρεύματος (downwash current).
10
Σε μικρότερη έκταση η επιλογή του περιγράμματος του πτερυγίου (δηλαδή του λόγου εκτεταμένης επιφάνειας και των κατανομών των χορδών, της πλευρικής και της διαμήκους απόκλισης), του αριθμού των πτερυγίων, του μέγιστου πάχους του πτερυγίου και της μορφής πάχους, επηρεάζουν την απόδοση κυρίως μέσω διαμόρφωσης των λεπτομερειών της συνεκτικής ροής.
Στην περίπτωση προωστήρα σε δακτύλιο (ducted propulsor) υπεισέρχεται και ένας αριθμός άλλων παραμέτρων, όπως η γεωμετρία του δακτυλίου (duct geometry), η οποία ελέγχει το φορτίο του δακτυλίου σε συνθήκες ρυμούλκησης και επηρεάζει την απόδοση σε διαφορετικά εύρη ταχυτήτων, το μέγεθος του κενού (gap size) μεταξύ του δακτυλίου και του ακροπτερυγίου και η γεωμετρία της περιοχής του ακροπτερυγίου (δηλαδή αν θα είναι τύπου Kaplan ή συμβατική).
Παράμετροι που επηρεάζουν τις ‘άλλες απαιτήσεις’ Για δεδομένη κατανομή αξονικών, ακτινικών και εφαπτομενικών συνιστωσών της ταχύτητας του όμορου του πλοίου, οι παράμετροι μορφής της έλικας που επηρεάζουν κατά κύριο λόγο τις μη μόνιμες δυνάμεις διέγερσης (δυνάμεις στη γάστρα, στο δακτύλιο, στο πτερύγιο και στον άξονα της έλικας) είναι:
• Ο αριθμός πτερυγίων, ο οποίος μαζί με τις στροφές της έλικας προσδιορίζει την συχνότητα του πτερυγίου (blade frequency)
• Η κατανομή της πλευρικής απόκλισης πτερυγίου, η οποία προσδιορίζει τον τρόπο με τον οποίο το χείλος πρόσπτωσης του πτερυγίου εισέρχεται στις περιοχές υψηλού ποσοστού ομόρρου
• Οι κατανομές βήματος και κυρτότητας στην περιοχή του ακροπτερυγίου, οι οποίες προσδιορίζουν την κατανομή φόρτισης του πτερυγίου και συνεπώς το εύρος των πιέσεων που επάγονται από το ακροπτερύγιο στα κοντινά στερεά σύνορα (γάστρα, πηδάλιο, στηρίγματα αξόνων).
Η παροδική (transient) σπηλαίωση επίσης προκαλεί μη μόνιμα φαινόμενα μέσα από ένα – μεταβαλλόμενο με τη θέση του πτερυγίου - «εικονικό» πάχος λόγω σπηλαίωσης, επιπρόσθετο στο πραγματικό πάχος του πτερυγίου. Η συμπεριφορά σε παροδική σπηλαίωση επηρεάζεται από:
• Το περίγραμμα του πτερυγίου (λόγος εκτεταμένης επιφάνειας και ακτινική κατανομή χορδών), το οποίο προσδιορίζει την κατανομή της διαφοράς πίεσης πάνω στην επιφάνεια του πτερυγίου για δεδομένη ολική ώση
• Την κατανομή (μορφή) πάχους του πτερυγίου, η οποία επηρεάζει την κατανομή πίεσης του πτερυγίου και ως αποτέλεσμα την ανάπτυξη σπηλαίωσης
• Τις κατανομές βήματος και κυρτότητας, οι οποίες προσδιορίζουν την ακτινική και χορδική κατανομή διαφοράς πίεσης του πτερυγίου
• Τις κατασκευαστικές ιδιότητες του πτερυγίου (blade structural properties), οι οποίες προσδιορίζουν την κατάσταση παραμόρφωσης του πτερυγίου ως συνάρτηση της φόρτισης λόγω πίεσης.
Η κατασκευαστική αξιοπιστία επηρεάζεται από:
• Τις κατανομές πάχους και χορδών του πτερυγίου
11
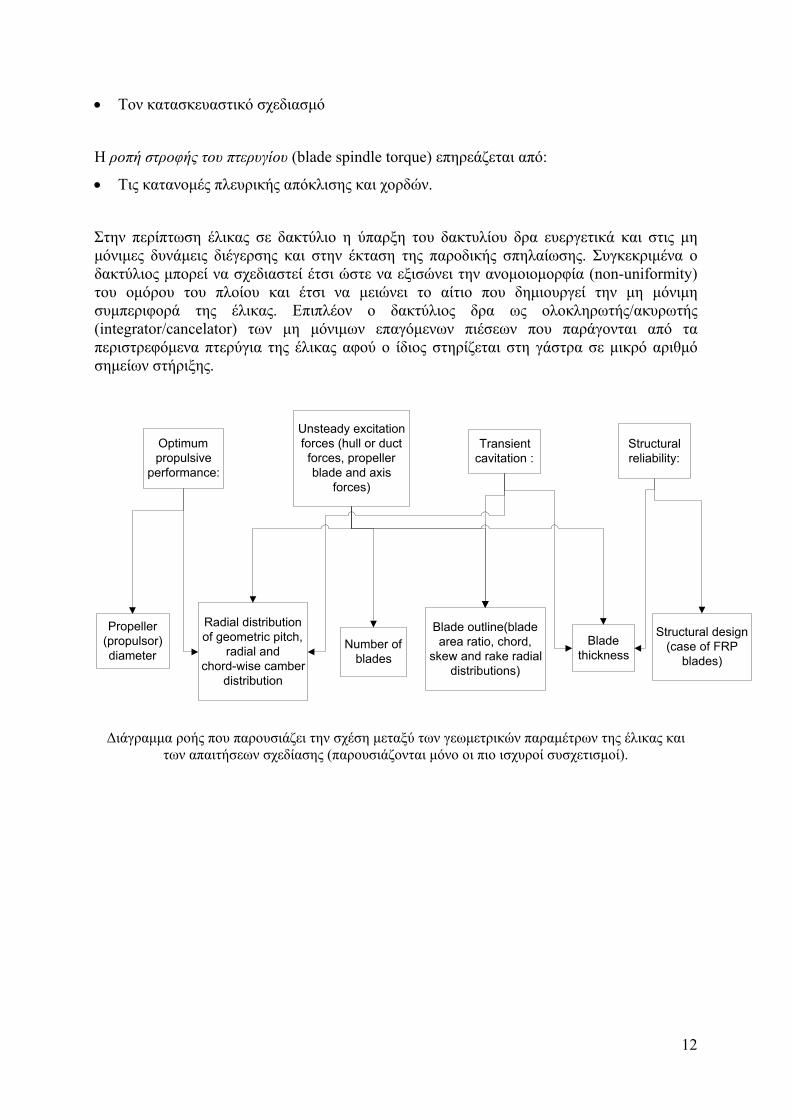
• Τον κατασκευαστικό σχεδιασμό
H ροπή στροφής του πτερυγίου (blade spindle torque) επηρεάζεται από:
• Τις κατανομές πλευρικής απόκλισης και χορδών.
Στην περίπτωση έλικας σε δακτύλιο η ύπαρξη του δακτυλίου δρα ευεργετικά και στις μη μόνιμες δυνάμεις διέγερσης και στην έκταση της παροδικής σπηλαίωσης. Συγκεκριμένα ο δακτύλιος μπορεί να σχεδιαστεί έτσι ώστε να εξισώνει την ανομοιομορφία (non-uniformity) του ομόρου του πλοίου και έτσι να μειώνει το αίτιο που δημιουργεί την μη μόνιμη συμπεριφορά της έλικας. Επιπλέον ο δακτύλιος δρα ως ολοκληρωτής/ακυρωτής (integrator/cancelator) των μη μόνιμων επαγόμενων πιέσεων που παράγονται από τα περιστρεφόμενα πτερύγια της έλικας αφού ο ίδιος στηρίζεται στη γάστρα σε μικρό αριθμό σημείων στήριξης.
Optimumpropulsive
performance:
Unsteady excitationforces (hull or ductforces, propellerblade and axis
forces)
Transientcavitation :
Structuralreliability:
Propeller(propulsor)diameter
Radial distributionof geometric pitch,
radial andchord-wise camber
distribution
Number ofblades
Blade outline(bladearea ratio, chord,
skew and rake radialdistributions)
Bladethickness
Structural design(case of FRP
blades)
Διάγραμμα ροής που παρουσιάζει την σχέση μεταξύ των γεωμετρικών παραμέτρων της έλικας και
των απαιτήσεων σχεδίασης (παρουσιάζονται μόνο οι πιο ισχυροί συσχετισμοί).
12
2.4 ΕΠΙΛΟΓΗ ΤΩΝ ΓΕΩΜΕΤΡΙΚΩΝ ΠΑΡΑΜΕΤΡΩΝ ΣΧΕΔΙΑΣΗΣ
Μπορεί τώρα να προταθεί μια μεθοδολογία για την επιλογή των παραμέτρων σχεδίασης ως εξής:
Διάμετρος έλικας Αν οι στροφές της έλικας επιλέγονται ελεύθερα, η διάμετρος της έλικας επιλέγεται πάντα ως η μέγιστη επιτρεπόμενη λαμβάνοντας υπόψη τις γραμμές του πλοίου στην περιοχή της πρύμνης, τις απαραίτητες ανοχές (clearances) έλικας – πηδαλίου – γάστρας, όπως περιγράφονται από τους Νηογνώμονες (Classification Societies) καθώς και τη συνθήκη MARPOL για την απόσταση ακροπτερυγίου ελεύθερης επιφάνειας κυρίως για πλεύση σε κατάσταση ερματισμού (αποφυγή αερισμού – ventilation – της έλικας). Στην περίπτωση δεδομένων στροφών έλικας (πχ. στην περίπτωση προεπιλεγμένης μηχανής και μειωτήρα) η βέλτιστη διάμετρος επιλέγεται βάσει της μεθοδολογίας που αναφέρεται παρακάτω (7.4.1, 7.4.2).
Κατανομές βήματος και κυρτότητας
Επιλέγονται έτσι ώστε:
• Να εξασφαλίζουν για τον προωστήρα μέγιστη υδροδυναμική απόδοση
• Να ελέγχουν την ακτινική κατανομή φόρτισης, η οποία επηρεάζει και τις δυνάμεις διέγερσης και την παροδική σπηλάιωση. Για παράδειγμα η αποφόρτιση του ακροπτερυγίου (tip unloaded prop.) δρα ευεργετικά και στις δυνάμεις διέγερσης και στην παροδική σπηλάιωση χωρίς σοβαρή μείωση της απόδοσης όταν συνοδεύεται από προσεκτική μελέτη με αναλυτικά εργαλεία.
Αριθμός πτερυγίων Ο αριθμός πτερυγίων Ζ επιλέγεται με σκοπό να αποφευχθεί ο συντονισμός (resonance) μεταξύ της συχνότητας πτερυγίου (=Z*n) και διαφόρων κατασκευαστικών στοιχείων. Επίσης επιλέγεται έτσι ώστε να ελαχιστοποιηθούν φαινόμενα δυναμικής καταπόνησης του αξονικού συστήματος (μελέτη στρεπτικών ταλαντώσεων - torsional vibration study).
Περίγραμμα πτερυγίου
Ο λόγος εκτεταμένης επιφάνειας επιλέγεται έτσι ώστε:
• Να μειωθεί η έκταση της σπηλαίωσης (η αύξηση της επιφάνειας του πτερυγίου οδηγεί σε μείωση της σπηλαίωσης). Ένας χρήσιμος τύπος για μια αρχική τιμή του λόγου ΑΕ/Α0 είναι εκείνος του Keller, PNA, Vol II, p.83[1].
• Να αυξηθεί ο βαθμός απόδοσης (η αύξηση του λόγου εκτεταμένης επιφάνειας οδηγεί σε μικρή μείωση του βαθμού απόδοσης που σχετίζεται με απώλειες συνεκτικότητας)
Τονίζεται ότι οι προηγούμενες δύο απαιτήσεις είναι αντικρουόμενες!
13
Η ακτινική κατανομή των μηκών των χορδών επιλέγεται έτσι ώστε:
• Να ελεγχθεί (μειωθεί) η επιφάνεια της σπηλαίωσης (η ακτινική κατανομή των χορδών θα πρέπει να ακολουθεί την ακτινική κατανομή φορτίου)
• Σε συνδυασμό με το πάχος να ελεγχθεί η μορφή του «φακέλου σπηλαίωσης» (cavitation free bucket) και η αντοχή της έλικας.
Η ακτινική κατανομή της πλευρικής απόκλισης πτερυγίου επιλέγεται έτσι ώστε:
• Να ελαχιστοποιηθεί το εύρος των μη μόνιμων δυνάμεων διέγερσης στη γάστρα και το αξονικό σύστημα και να ελαχιστοποιηθεί η παροδική σπηλαίωση.
• Να ελαχιστοποιηθεί η ροπή στροφής σε διάφορα βήματα (περίπτωση έλικας ρυθμιζομένου βήματος)
Η ακτινική κατανομή της διαμήκους απόκλισης πτερυγίου επιλέγεται έτσι ώστε:
• Να είναι περίπου ίδιες οι ανοχές του πτερυγίου από όλα τα στερεά σύνορα, ελαχιστοποιώντας έτσι την μη μόνιμη αλληλεπίδραση μεταξύ έλικας, γάστρας και πηδαλίου. Αυξάνοντας τη διαμήκη απόκλιση πτερυγίου οι τάσεις λόγω φυγόκεντρων δυνάμεων αυξάνονται και απαιτείται πάχυνση του πτερυγίου στην περιοχή της ρίζας (root section).
Κατανομή πάχους πτερυγίου Επιλέγεται έτσι ώστε:
• Να οδηγήσει σε καλύτερο λόγο ώσης προς αντίσταση μορφής (form drag) (μειούμενο το πάχος αυξάνει την απόδοση)
• Να οδηγήσει σε ικανοποιητικό «φάκελο σπηλαίωσης» (αυξανόμενο το πάχος δρα ευεργετικά)
• Να υπάρχει ικανοποιητική κατασκευαστική αξιοπιστία (μαζί με την κατανομή των χορδών) με ένα ελάχιστο βάρος έλικας (ελαχιστοποίηση κόστους)
Τονίζεται ότι η πρώτη και η δεύτερη από τις προηγούμενες απαιτήσεις είναι αντικρουόμενες!
Από την προηγούμενη συζήτηση είναι φανερό ότι η βελτιστοποίηση της απόδοσης για έναν προωστήρα επιτυγχάνεται πρωτίστως με τη σωστή επιλογή:
• Της διαμέτρου του προωστήρα
• Των κατανομών βήματος/ κυρτότητα και της μορφής πάχους (σε μικρότερο βαθμό) του πτερυγίου.
Όλες οι άλλες παράμετροι ασκούν μικρότερης τάξης επίδραση στο βαθμό απόδοσης και ως εκ τούτου επιλέγονται με «άλλα κριτήρια» και όχι σε σχέση με τη βελτιστοποίηση της υδροδυναμικής συμπεριφοράς.
14
3 ΚΑΛΩΣ - ΤΕΘΕΙΜΕΝΑ ΠΡΟΒΛΗΜΑΤΑ ΠΡΟΩΣΗΣ
Παρατηρήστε το διάγραμμα ελεύθερης ροής της έλικας, σχήμα 7.5α, που δίνει τους συντελεστές ώσης ΚΤ, ροπής ΚQ και το βαθμό απόδοσης ελεύθερης ροής της έλικας η0, συναρτήσει του συντελεστή προχώρησης J (παράμετρος στον οριζόντιο άξονα) για δεδομένο λόγο βήματος προς διάμετρο P/D (παράμετρος στο σχήμα 7.5α), αριθμό πτερυγίων Z και λόγο εκτεταμένης επιφάνειας ΑΕ/Α0. Ειδικότερα ισχύουν οι ακόλουθοι ορισμοί:
• Συντελεστής προχώρησης: AVJnD
= ,
• Συντελεστής ώσης: 2 4TTK
n Dρ= ,
• Συντελεστής ροπής: 2 5QQK
n Dρ= και
• Βαθμός απόδοσης ελεύθερης ροής: 0 2T
Q
KJK
ηπ
= , δηλαδή η καμπύλη αυτή δεν είναι
ανεξάρτητη από τις άλλες δύο αφού εκφράζεται συναρτήσει των ΚΤ, ΚQ.
Με μια απλή παρατήρηση φαίνεται ότι τα διαστατά μεγέθη που χρειαζόμαστε για να εκφράσουμε τα αδιάστατα μεγέθη J, ΚΤ είναι τα ακόλουθα τέσσερα: VA, n, D, T. Αν τώρα τα J, ΚΤ είναι γνωστά τότε καθορίζεται μονοσήμαντα ένα σημείο στο σχήμα 7.5α. Τότε όμως καθορίζεται και το P/D (και άρα το P) και ως εκ τούτου και τα ΚQ (και άρα το Q) και η0. Δηλαδή όλα τα στοιχεία που αφορούν την συμπεριφορά της έλικας σε ελεύθερη ροή είναι γνωστά!
Παρατηρήστε ακολούθως ότι αν τα VA, n, D, Q είναι γνωστά τότε με ‘παράλληλη’ με την ανωτέρω σκέψη όλα τα στοιχεία που αφορούν την συμπεριφορά της έλικας σε ελεύθερη ροή είναι επίσης γνωστά!.
Δεν είναι δύσκολο να συνεχίσει κάποιος το ‘παιχνίδι’ αυτό επιλέγοντας οποιαδήποτε τέσσερα από τα VA, n, D, T, Q, P και δείχνοντας ότι τα υπόλοιπα δύο υπολογίζονται κατευθείαν από το σχήμα 7.5α.
Αν τώρα αντί για τέσσερα μεγέθη γνωρίζουμε τρία, τότε υποθέτοντας το τέταρτο θα παραχθεί ένα πρόβλημα του ανωτέρω τύπου (τέσσερα στοιχεία γνωστά). Παράγονται έτσι συναρτήσεις που θα δίνουν τα υπόλοιπα μεγέθη συναρτήσει του τετάρτου που επιλέξαμε σαν παράμετρο. Το ίδιο θα ισχύει αν γνωρίζουμε δυο μεγέθη όποτε θα χρειαστούμε δύο παραμέτρους για να εκφράσουμε παραμετρικά τα υπόλοιπα μεγέθη κλπ.
15
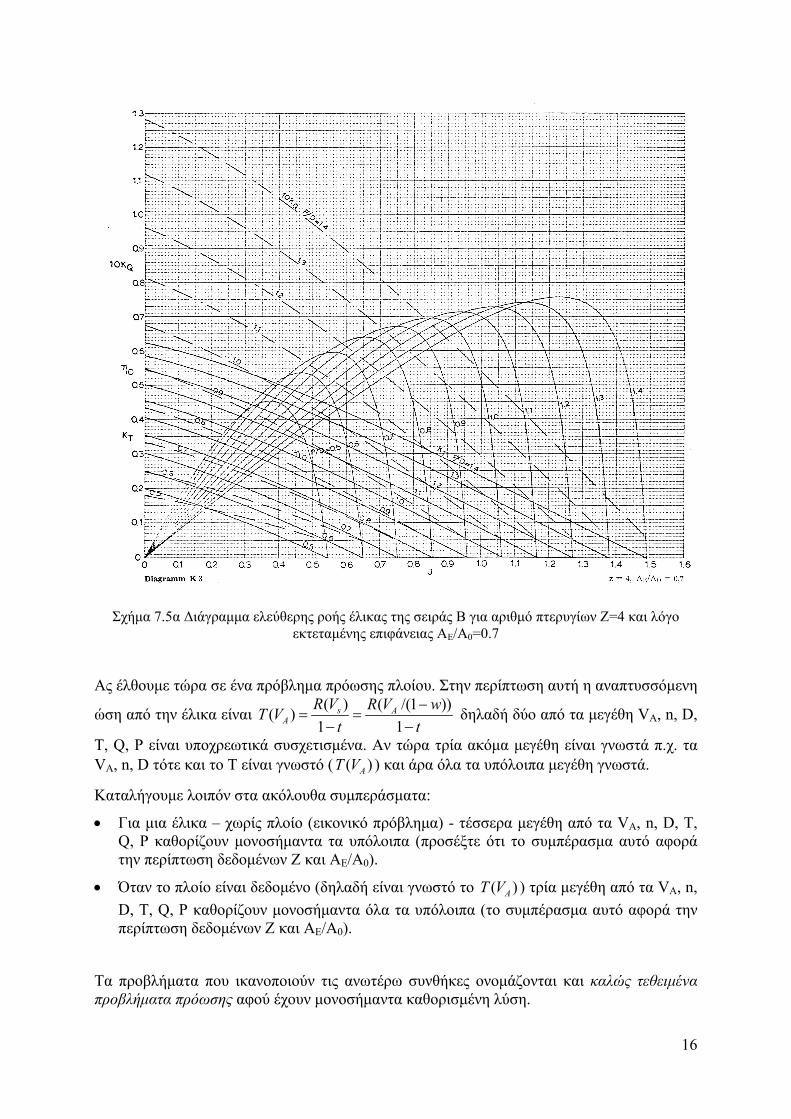
Σχήμα 7.5α Διάγραμμα ελεύθερης ροής έλικας της σειράς Β για αριθμό πτερυγίων Ζ=4 και λόγο
εκτεταμένης επιφάνειας ΑΕ/Α0=0.7
Ας έλθουμε τώρα σε ένα πρόβλημα πρόωσης πλοίου. Στην περίπτωση αυτή η αναπτυσσόμενη
ώση από την έλικα είναι ( ) ( /(1 ))( )1 1
s AA
R V R V wT Vt t
−= =
− − δηλαδή δύο από τα μεγέθη VA, n, D,
T, Q, P είναι υποχρεωτικά συσχετισμένα. Αν τώρα τρία ακόμα μεγέθη είναι γνωστά π.χ. τα VA, n, D τότε και το Τ είναι γνωστό ( ) και άρα όλα τα υπόλοιπα μεγέθη γνωστά. ( )AT V
Καταλήγουμε λοιπόν στα ακόλουθα συμπεράσματα:
• Για μια έλικα – χωρίς πλοίο (εικονικό πρόβλημα) - τέσσερα μεγέθη από τα VA, n, D, T, Q, P καθορίζουν μονοσήμαντα τα υπόλοιπα (προσέξτε ότι το συμπέρασμα αυτό αφορά την περίπτωση δεδομένων Ζ και ΑΕ/Α0).
• Όταν το πλοίο είναι δεδομένο (δηλαδή είναι γνωστό το ( )AT V ) τρία μεγέθη από τα VA, n, D, T, Q, P καθορίζουν μονοσήμαντα όλα τα υπόλοιπα (το συμπέρασμα αυτό αφορά την περίπτωση δεδομένων Ζ και ΑΕ/Α0).
Τα προβλήματα που ικανοποιούν τις ανωτέρω συνθήκες ονομάζονται και καλώς τεθειμένα προβλήματα πρόωσης αφού έχουν μονοσήμαντα καθορισμένη λύση.
16
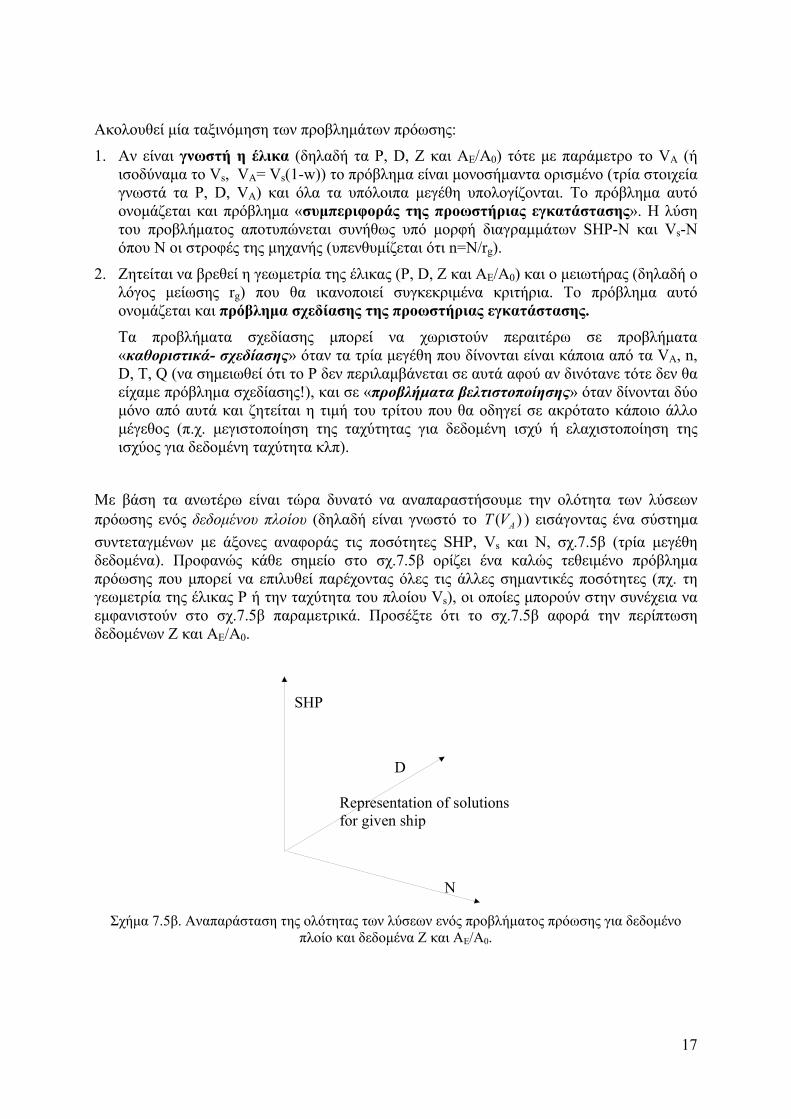
Ακολουθεί μία ταξινόμηση των προβλημάτων πρόωσης:
1. Αν είναι γνωστή η έλικα (δηλαδή τα P, D, Ζ και ΑΕ/Α0) τότε με παράμετρο το VA (ή ισοδύναμα το Vs, VA= Vs(1-w)) το πρόβλημα είναι μονοσήμαντα ορισμένο (τρία στοιχεία γνωστά τα P, D, VA) και όλα τα υπόλοιπα μεγέθη υπολογίζονται. Το πρόβλημα αυτό ονομάζεται και πρόβλημα «συμπεριφοράς της προωστήριας εγκατάστασης». Η λύση του προβλήματος αποτυπώνεται συνήθως υπό μορφή διαγραμμάτων SHP-N και Vs-Ν όπου Ν οι στροφές της μηχανής (υπενθυμίζεται ότι n=N/rg).
2. Ζητείται να βρεθεί η γεωμετρία της έλικας (P, D, Ζ και ΑΕ/Α0) και ο μειωτήρας (δηλαδή ο λόγος μείωσης rg) που θα ικανοποιεί συγκεκριμένα κριτήρια. Το πρόβλημα αυτό ονομάζεται και πρόβλημα σχεδίασης της προωστήριας εγκατάστασης.
Τα προβλήματα σχεδίασης μπορεί να χωριστούν περαιτέρω σε προβλήματα «καθοριστικά- σχεδίασης» όταν τα τρία μεγέθη που δίνονται είναι κάποια από τα VA, n, D, T, Q (να σημειωθεί ότι το P δεν περιλαμβάνεται σε αυτά αφού αν δινότανε τότε δεν θα είχαμε πρόβλημα σχεδίασης!), και σε «προβλήματα βελτιστοποίησης» όταν δίνονται δύο μόνο από αυτά και ζητείται η τιμή του τρίτου που θα οδηγεί σε ακρότατο κάποιο άλλο μέγεθος (π.χ. μεγιστοποίηση της ταχύτητας για δεδομένη ισχύ ή ελαχιστοποίηση της ισχύος για δεδομένη ταχύτητα κλπ).
Με βάση τα ανωτέρω είναι τώρα δυνατό να αναπαραστήσουμε την ολότητα των λύσεων πρόωσης ενός δεδομένου πλοίου (δηλαδή είναι γνωστό το ( ) ) εισάγοντας ένα σύστημα συντεταγμένων με άξονες αναφοράς τις ποσότητες SHP, Vs και N, σχ.7.5β (τρία μεγέθη δεδομένα). Προφανώς κάθε σημείο στο σχ.7.5β ορίζει ένα καλώς τεθειμένο πρόβλημα πρόωσης που μπορεί να επιλυθεί παρέχοντας όλες τις άλλες σημαντικές ποσότητες (πχ. τη γεωμετρία της έλικας P ή την ταχύτητα του πλοίου Vs), οι οποίες μπορούν στην συνέχεια να εμφανιστούν στο σχ.7.5β παραμετρικά. Προσέξτε ότι το σχ.7.5β αφορά την περίπτωση δεδομένων Ζ και ΑΕ/Α0.
AT V
SHP
D
N
Representation of solutionsfor given ship
Σχήμα 7.5β. Αναπαράσταση της ολότητας των λύσεων ενός προβλήματος πρόωσης για δεδομένο
πλοίο και δεδομένα Ζ και ΑΕ/Α0.
17
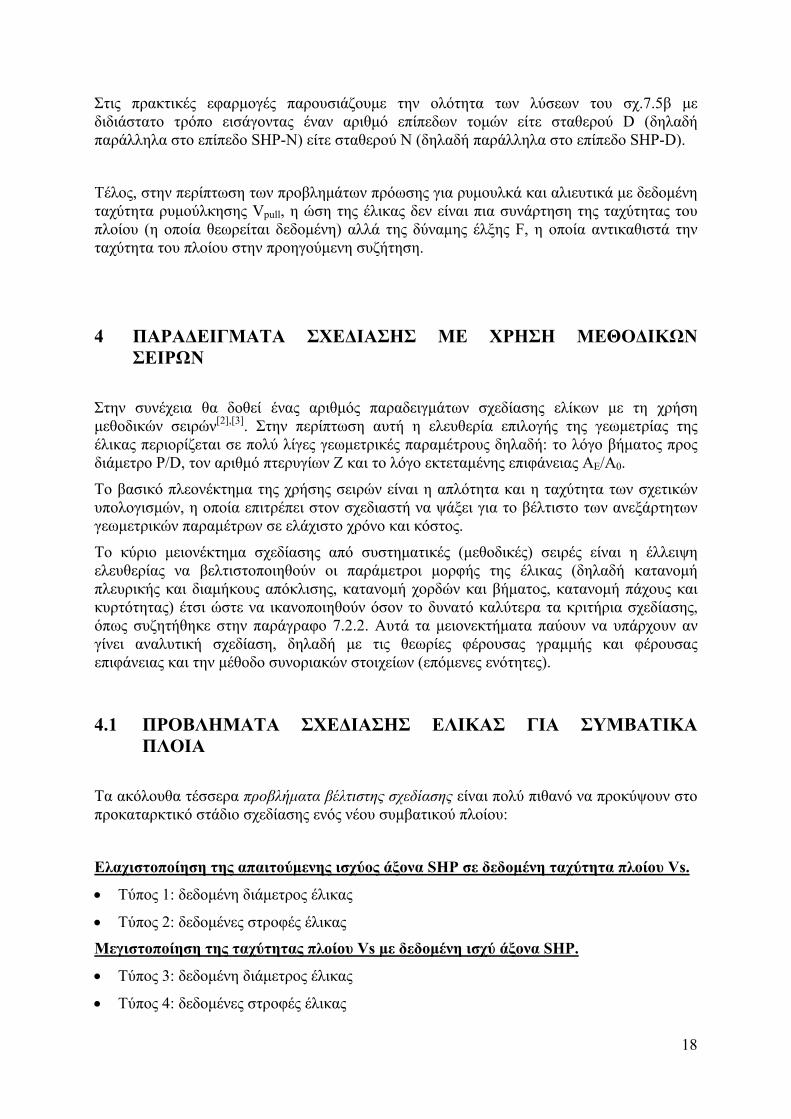
Στις πρακτικές εφαρμογές παρουσιάζουμε την ολότητα των λύσεων του σχ.7.5β με διδιάστατο τρόπο εισάγοντας έναν αριθμό επίπεδων τομών είτε σταθερού D (δηλαδή παράλληλα στο επίπεδο SHP-N) είτε σταθερού Ν (δηλαδή παράλληλα στο επίπεδο SHP-D).
Τέλος, στην περίπτωση των προβλημάτων πρόωσης για ρυμουλκά και αλιευτικά με δεδομένη ταχύτητα ρυμούλκησης Vpull, η ώση της έλικας δεν είναι πια συνάρτηση της ταχύτητας του πλοίου (η οποία θεωρείται δεδομένη) αλλά της δύναμης έλξης F, η οποία αντικαθιστά την ταχύτητα του πλοίου στην προηγούμενη συζήτηση.
4 ΠΑΡΑΔΕΙΓΜΑΤΑ ΣΧΕΔΙΑΣΗΣ ΜΕ ΧΡΗΣΗ ΜΕΘΟΔΙΚΩΝ ΣΕΙΡΩΝ
Στην συνέχεια θα δοθεί ένας αριθμός παραδειγμάτων σχεδίασης ελίκων με τη χρήση μεθοδικών σειρών[2],[3]. Στην περίπτωση αυτή η ελευθερία επιλογής της γεωμετρίας της έλικας περιορίζεται σε πολύ λίγες γεωμετρικές παραμέτρους δηλαδή: το λόγο βήματος προς διάμετρο P/D, τον αριθμό πτερυγίων Ζ και το λόγο εκτεταμένης επιφάνειας ΑΕ/Α0.
Το βασικό πλεονέκτημα της χρήσης σειρών είναι η απλότητα και η ταχύτητα των σχετικών υπολογισμών, η οποία επιτρέπει στον σχεδιαστή να ψάξει για το βέλτιστο των ανεξάρτητων γεωμετρικών παραμέτρων σε ελάχιστο χρόνο και κόστος.
Το κύριο μειονέκτημα σχεδίασης από συστηματικές (μεθοδικές) σειρές είναι η έλλειψη ελευθερίας να βελτιστοποιηθούν οι παράμετροι μορφής της έλικας (δηλαδή κατανομή πλευρικής και διαμήκους απόκλισης, κατανομή χορδών και βήματος, κατανομή πάχους και κυρτότητας) έτσι ώστε να ικανοποιηθούν όσον το δυνατό καλύτερα τα κριτήρια σχεδίασης, όπως συζητήθηκε στην παράγραφο 7.2.2. Αυτά τα μειονεκτήματα παύουν να υπάρχουν αν γίνει αναλυτική σχεδίαση, δηλαδή με τις θεωρίες φέρουσας γραμμής και φέρουσας επιφάνειας και την μέθοδο συνοριακών στοιχείων (επόμενες ενότητες).
4.1 ΠΡΟΒΛΗΜΑΤΑ ΣΧΕΔΙΑΣΗΣ ΕΛΙΚΑΣ ΓΙΑ ΣΥΜΒΑΤΙΚΑ ΠΛΟΙΑ
Τα ακόλουθα τέσσερα προβλήματα βέλτιστης σχεδίασης είναι πολύ πιθανό να προκύψουν στο προκαταρκτικό στάδιο σχεδίασης ενός νέου συμβατικού πλοίου:
Ελαχιστοποίηση της απαιτούμενης ισχύος άξονα SHΡ σε δεδομένη ταχύτητα πλοίου Vs.
• Τύπος 1: δεδομένη διάμετρος έλικας
• Τύπος 2: δεδομένες στροφές έλικας
Μεγιστοποίηση της ταχύτητας πλοίου Vs με δεδομένη ισχύ άξονα SHΡ.
• Τύπος 3: δεδομένη διάμετρος έλικας
• Τύπος 4: δεδομένες στροφές έλικας
18
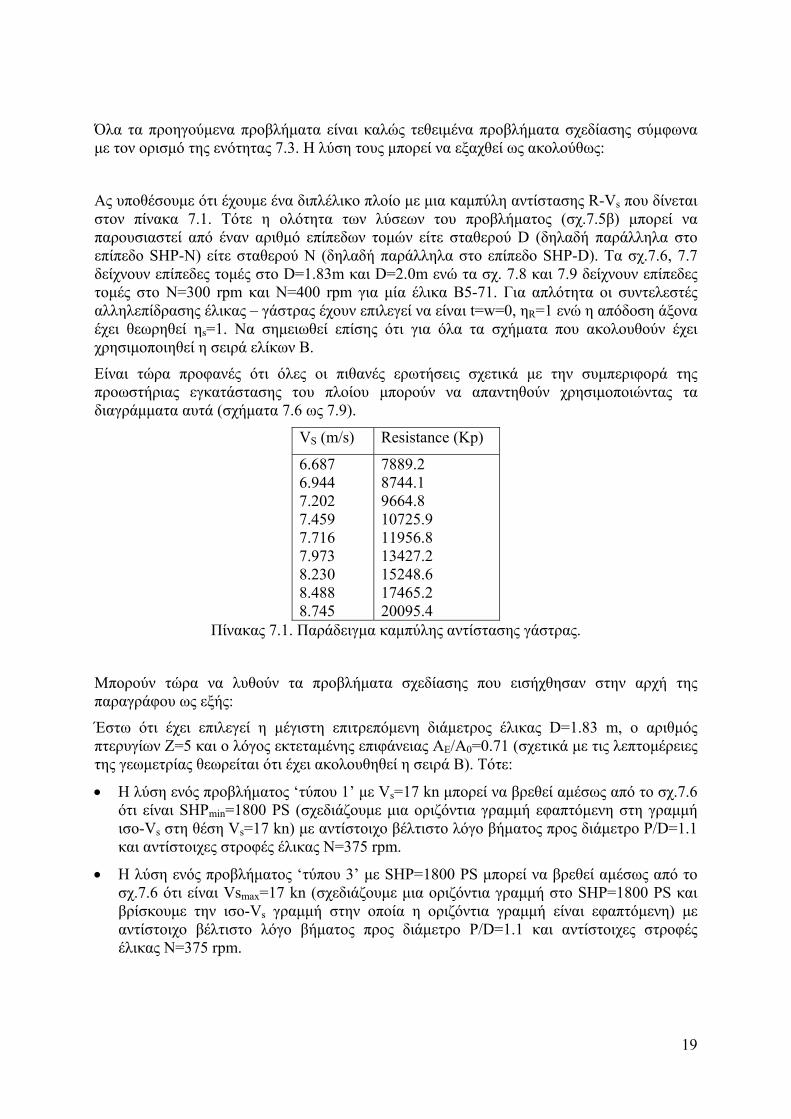
Όλα τα προηγούμενα προβλήματα είναι καλώς τεθειμένα προβλήματα σχεδίασης σύμφωνα με τον ορισμό της ενότητας 7.3. Η λύση τους μπορεί να εξαχθεί ως ακολούθως:
Ας υποθέσουμε ότι έχουμε ένα διπλέλικο πλοίο με μια καμπύλη αντίστασης R-Vs που δίνεται στον πίνακα 7.1. Τότε η ολότητα των λύσεων του προβλήματος (σχ.7.5β) μπορεί να παρουσιαστεί από έναν αριθμό επίπεδων τομών είτε σταθερού D (δηλαδή παράλληλα στο επίπεδο SHP-N) είτε σταθερού Ν (δηλαδή παράλληλα στο επίπεδο SHP-D). Τα σχ.7.6, 7.7 δείχνουν επίπεδες τομές στο D=1.83m και D=2.0m ενώ τα σχ. 7.8 και 7.9 δείχνουν επίπεδες τομές στο Ν=300 rpm και Ν=400 rpm για μία έλικα Β5-71. Για απλότητα οι συντελεστές αλληλεπίδρασης έλικας – γάστρας έχουν επιλεγεί να είναι t=w=0, ηR=1 ενώ η απόδοση άξονα έχει θεωρηθεί ηs=1. Να σημειωθεί επίσης ότι για όλα τα σχήματα που ακολουθούν έχει χρησιμοποιηθεί η σειρά ελίκων Β.
Είναι τώρα προφανές ότι όλες οι πιθανές ερωτήσεις σχετικά με την συμπεριφορά της προωστήριας εγκατάστασης του πλοίου μπορούν να απαντηθούν χρησιμοποιώντας τα διαγράμματα αυτά (σχήματα 7.6 ως 7.9).
VS (m/s) Resistance (Kp)
6.687 6.944 7.202 7.459 7.716 7.973 8.230 8.488 8.745
7889.2 8744.1 9664.8 10725.9 11956.8 13427.2 15248.6 17465.2 20095.4
Πίνακας 7.1. Παράδειγμα καμπύλης αντίστασης γάστρας.
Μπορούν τώρα να λυθούν τα προβλήματα σχεδίασης που εισήχθησαν στην αρχή της παραγράφου ως εξής:
Έστω ότι έχει επιλεγεί η μέγιστη επιτρεπόμενη διάμετρος έλικας D=1.83 m, ο αριθμός πτερυγίων Ζ=5 και ο λόγος εκτεταμένης επιφάνειας ΑΕ/Α0=0.71 (σχετικά με τις λεπτομέρειες της γεωμετρίας θεωρείται ότι έχει ακολουθηθεί η σειρά Β). Τότε:
• Η λύση ενός προβλήματος ‘τύπου 1’ με Vs=17 kn μπορεί να βρεθεί αμέσως από το σχ.7.6 ότι είναι SHPmin=1800 PS (σχεδιάζουμε μια οριζόντια γραμμή εφαπτόμενη στη γραμμή ισο-Vs στη θέση Vs=17 kn) με αντίστοιχο βέλτιστο λόγο βήματος προς διάμετρο P/D=1.1 και αντίστοιχες στροφές έλικας Ν=375 rpm.
• Η λύση ενός προβλήματος ‘τύπου 3’ με SHP=1800 PS μπορεί να βρεθεί αμέσως από το σχ.7.6 ότι είναι Vsmax=17 kn (σχεδιάζουμε μια οριζόντια γραμμή στο SHP=1800 PS και βρίσκουμε την ισο-Vs γραμμή στην οποία η οριζόντια γραμμή είναι εφαπτόμενη) με αντίστοιχο βέλτιστο λόγο βήματος προς διάμετρο P/D=1.1 και αντίστοιχες στροφές έλικας Ν=375 rpm.
19
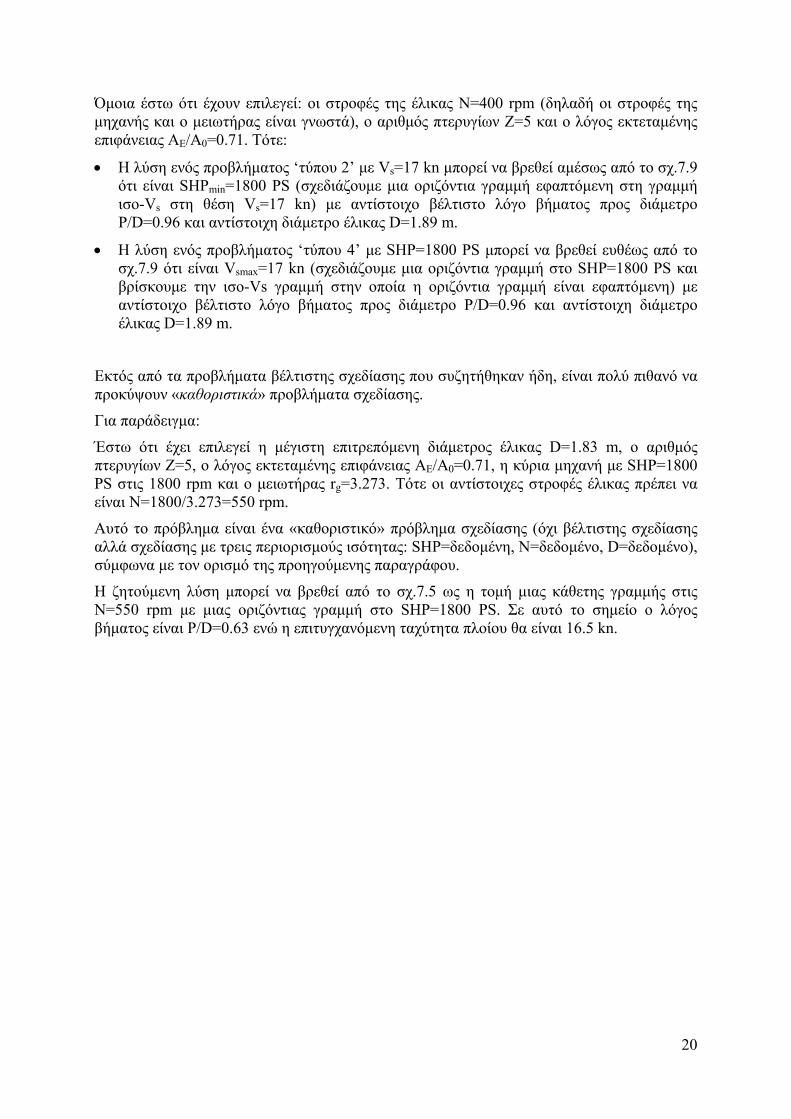
Όμοια έστω ότι έχουν επιλεγεί: οι στροφές της έλικας Ν=400 rpm (δηλαδή οι στροφές της μηχανής και ο μειωτήρας είναι γνωστά), ο αριθμός πτερυγίων Ζ=5 και ο λόγος εκτεταμένης επιφάνειας ΑΕ/Α0=0.71. Τότε:
• Η λύση ενός προβλήματος ‘τύπου 2’ με Vs=17 kn μπορεί να βρεθεί αμέσως από το σχ.7.9 ότι είναι SHPmin=1800 PS (σχεδιάζουμε μια οριζόντια γραμμή εφαπτόμενη στη γραμμή ισο-Vs στη θέση Vs=17 kn) με αντίστοιχο βέλτιστο λόγο βήματος προς διάμετρο P/D=0.96 και αντίστοιχη διάμετρο έλικας D=1.89 m.
• Η λύση ενός προβλήματος ‘τύπου 4’ με SHP=1800 PS μπορεί να βρεθεί ευθέως από το σχ.7.9 ότι είναι Vsmax=17 kn (σχεδιάζουμε μια οριζόντια γραμμή στο SHP=1800 PS και βρίσκουμε την ισο-Vs γραμμή στην οποία η οριζόντια γραμμή είναι εφαπτόμενη) με αντίστοιχο βέλτιστο λόγο βήματος προς διάμετρο P/D=0.96 και αντίστοιχη διάμετρο έλικας D=1.89 m.
Εκτός από τα προβλήματα βέλτιστης σχεδίασης που συζητήθηκαν ήδη, είναι πολύ πιθανό να προκύψουν «καθοριστικά» προβλήματα σχεδίασης.
Για παράδειγμα:
Έστω ότι έχει επιλεγεί η μέγιστη επιτρεπόμενη διάμετρος έλικας D=1.83 m, ο αριθμός πτερυγίων Ζ=5, ο λόγος εκτεταμένης επιφάνειας ΑΕ/Α0=0.71, η κύρια μηχανή με SHP=1800 PS στις 1800 rpm και ο μειωτήρας rg=3.273. Τότε οι αντίστοιχες στροφές έλικας πρέπει να είναι Ν=1800/3.273=550 rpm.
Αυτό το πρόβλημα είναι ένα «καθοριστικό» πρόβλημα σχεδίασης (όχι βέλτιστης σχεδίασης αλλά σχεδίασης με τρεις περιορισμούς ισότητας: SHP=δεδομένη, N=δεδομένο, D=δεδομένο), σύμφωνα με τον ορισμό της προηγούμενης παραγράφου.
Η ζητούμενη λύση μπορεί να βρεθεί από το σχ.7.5 ως η τομή μιας κάθετης γραμμής στις Ν=550 rpm με μιας οριζόντιας γραμμή στο SHP=1800 PS. Σε αυτό το σημείο ο λόγος βήματος είναι P/D=0.63 ενώ η επιτυγχανόμενη ταχύτητα πλοίου θα είναι 16.5 kn.
20
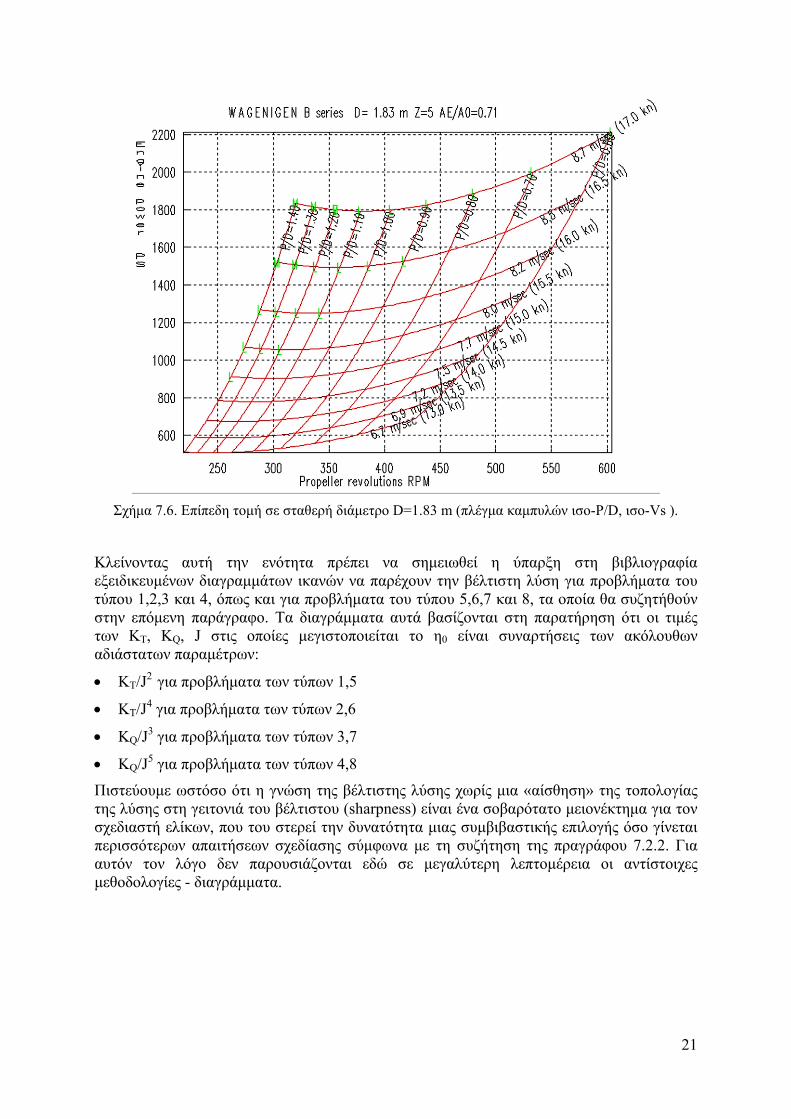
Σχήμα 7.6. Επίπεδη τομή σε σταθερή διάμετρο D=1.83 m (πλέγμα καμπυλών ισο-P/D, ισο-Vs ).
Κλείνοντας αυτή την ενότητα πρέπει να σημειωθεί η ύπαρξη στη βιβλιογραφία εξειδικευμένων διαγραμμάτων ικανών να παρέχουν την βέλτιστη λύση για προβλήματα του τύπου 1,2,3 και 4, όπως και για προβλήματα του τύπου 5,6,7 και 8, τα οποία θα συζητήθούν στην επόμενη παράγραφο. Τα διαγράμματα αυτά βασίζονται στη παρατήρηση ότι οι τιμές των KT, KQ, J στις οποίες μεγιστοποιείται το η0 είναι συναρτήσεις των ακόλουθων αδιάστατων παραμέτρων:
• KT/J2 για προβλήματα των τύπων 1,5
• KT/J4 για προβλήματα των τύπων 2,6
• KQ/J3 για προβλήματα των τύπων 3,7
• KQ/J5 για προβλήματα των τύπων 4,8
Πιστεύουμε ωστόσο ότι η γνώση της βέλτιστης λύσης χωρίς μια «αίσθηση» της τοπολογίας της λύσης στη γειτονιά του βέλτιστου (sharpness) είναι ένα σοβαρότατο μειονέκτημα για τον σχεδιαστή ελίκων, που του στερεί την δυνατότητα μιας συμβιβαστικής επιλογής όσο γίνεται περισσότερων απαιτήσεων σχεδίασης σύμφωνα με τη συζήτηση της πραγράφου 7.2.2. Για αυτόν τον λόγο δεν παρουσιάζονται εδώ σε μεγαλύτερη λεπτομέρεια οι αντίστοιχες μεθοδολογίες - διαγράμματα.
21
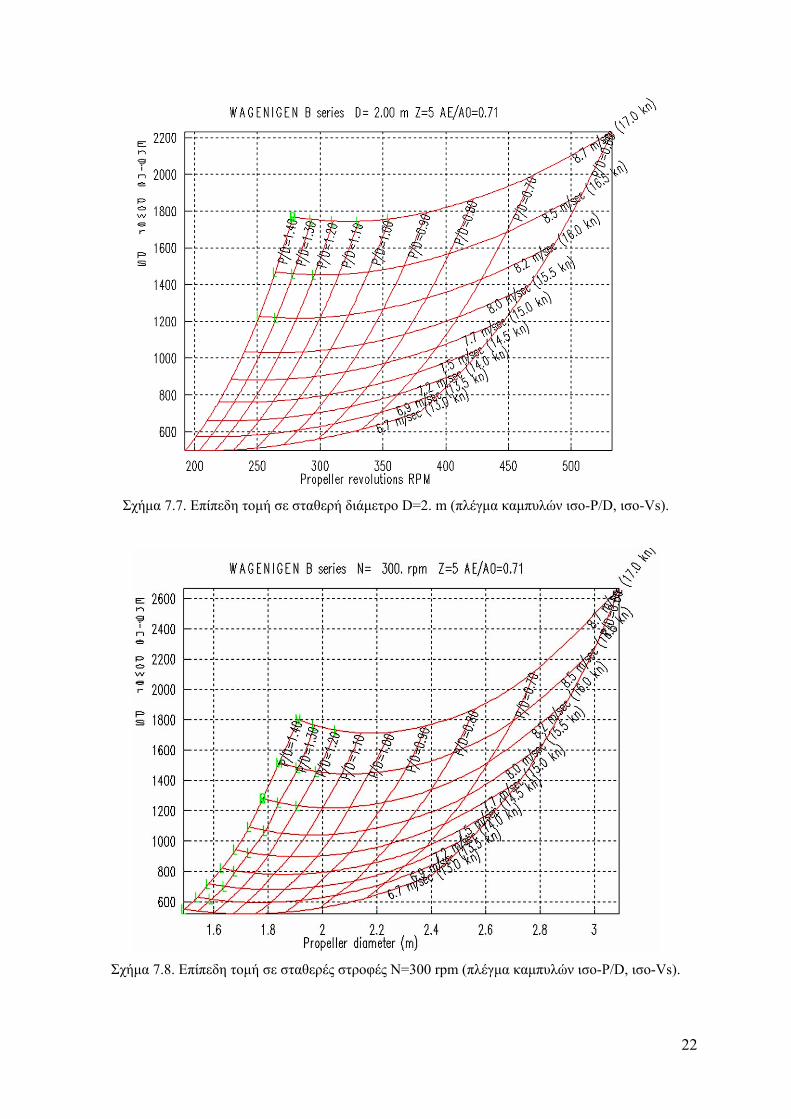
Σχήμα 7.7. Επίπεδη τομή σε σταθερή διάμετρο D=2. m (πλέγμα καμπυλών ισο-P/D, ισο-Vs).
Σχήμα 7.8. Επίπεδη τομή σε σταθερές στροφές Ν=300 rpm (πλέγμα καμπυλών ισο-P/D, ισο-Vs).
22
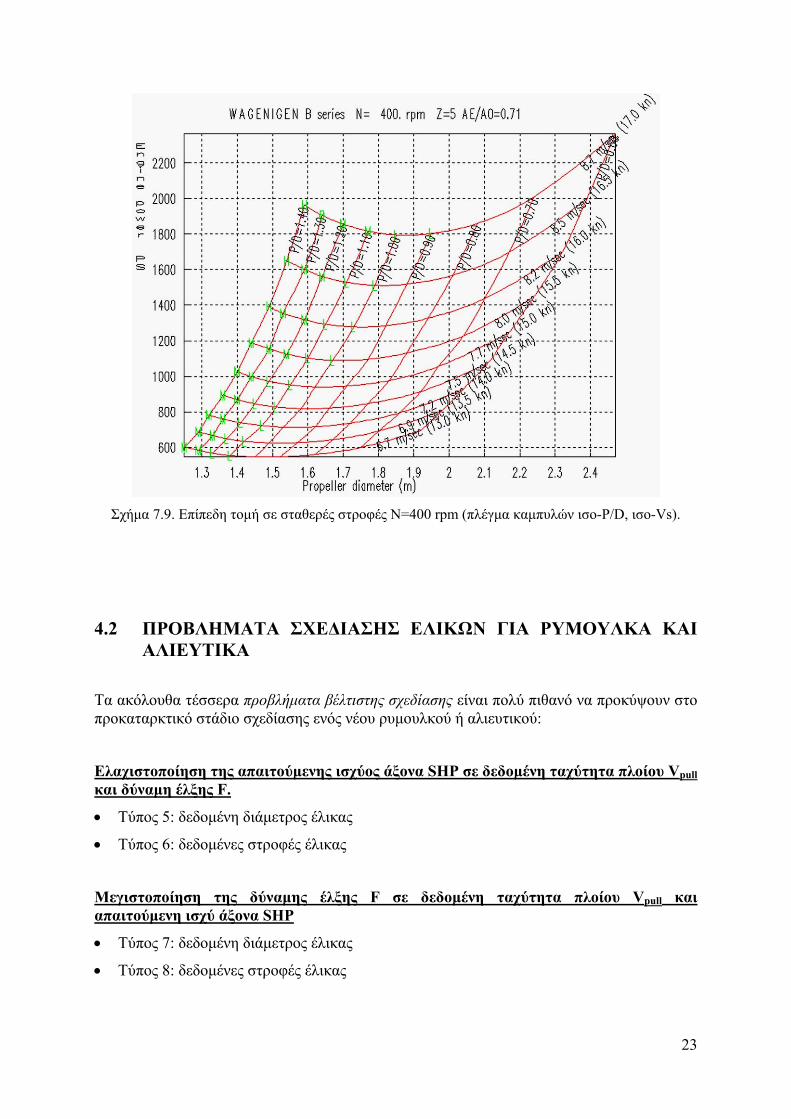
Σχήμα 7.9. Επίπεδη τομή σε σταθερές στροφές N=400 rpm (πλέγμα καμπυλών ισο-P/D, ισο-Vs).
4.2 ΠΡΟΒΛΗΜΑΤΑ ΣΧΕΔΙΑΣΗΣ ΕΛΙΚΩΝ ΓΙΑ ΡΥΜΟΥΛΚΑ ΚΑΙ ΑΛΙΕΥΤΙΚΑ
Τα ακόλουθα τέσσερα προβλήματα βέλτιστης σχεδίασης είναι πολύ πιθανό να προκύψουν στο προκαταρκτικό στάδιο σχεδίασης ενός νέου ρυμουλκού ή αλιευτικού:
Ελαχιστοποίηση της απαιτούμενης ισχύος άξονα SHΡ σε δεδομένη ταχύτητα πλοίου Vpull και δύναμη έλξης F.
• Τύπος 5: δεδομένη διάμετρος έλικας
• Τύπος 6: δεδομένες στροφές έλικας
Μεγιστοποίηση της δύναμης έλξης F σε δεδομένη ταχύτητα πλοίου Vpull και απαιτούμενη ισχύ άξονα SHΡ
• Τύπος 7: δεδομένη διάμετρος έλικας
• Τύπος 8: δεδομένες στροφές έλικας
23
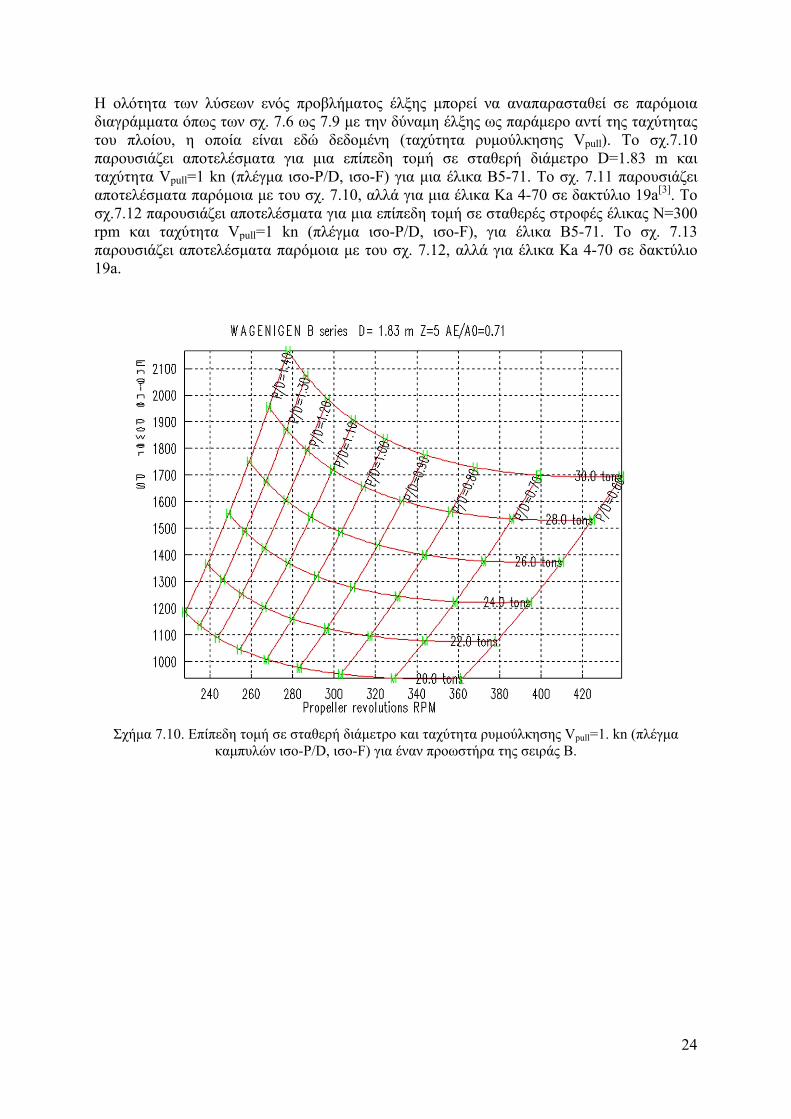
Η ολότητα των λύσεων ενός προβλήματος έλξης μπορεί να αναπαρασταθεί σε παρόμοια διαγράμματα όπως των σχ. 7.6 ως 7.9 με την δύναμη έλξης ως παράμερο αντί της ταχύτητας του πλοίου, η οποία είναι εδώ δεδομένη (ταχύτητα ρυμούλκησης Vpull). Το σχ.7.10 παρουσιάζει αποτελέσματα για μια επίπεδη τομή σε σταθερή διάμετρο D=1.83 m και ταχύτητα Vpull=1 kn (πλέγμα ισο-P/D, ισο-F) για μια έλικα Β5-71. Το σχ. 7.11 παρουσιάζει αποτελέσματα παρόμοια με του σχ. 7.10, αλλά για μια έλικα Ka 4-70 σε δακτύλιο 19a[3]. Το σχ.7.12 παρουσιάζει αποτελέσματα για μια επίπεδη τομή σε σταθερές στροφές έλικας Ν=300 rpm και ταχύτητα Vpull=1 kn (πλέγμα ισο-P/D, ισο-F), για έλικα Β5-71. Το σχ. 7.13 παρουσιάζει αποτελέσματα παρόμοια με του σχ. 7.12, αλλά για έλικα Ka 4-70 σε δακτύλιο 19a.
Σχήμα 7.10. Επίπεδη τομή σε σταθερή διάμετρο και ταχύτητα ρυμούλκησης Vpull=1. kn (πλέγμα
καμπυλών ισο-P/D, ισο-F) για έναν προωστήρα της σειράς Β.
24
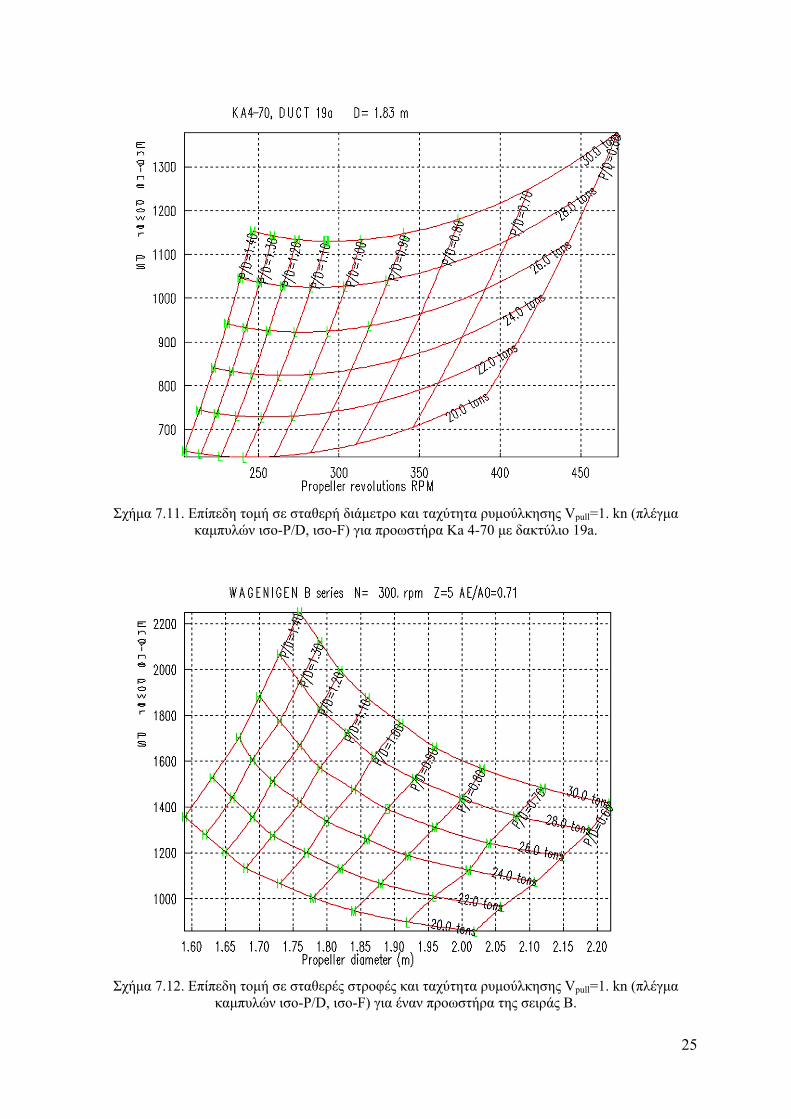
Σχήμα 7.11. Επίπεδη τομή σε σταθερή διάμετρο και ταχύτητα ρυμούλκησης Vpull=1. kn (πλέγμα
καμπυλών ισο-P/D, ισο-F) για προωστήρα Ka 4-70 με δακτύλιο 19a.
Σχήμα 7.12. Επίπεδη τομή σε σταθερές στροφές και ταχύτητα ρυμούλκησης Vpull=1. kn (πλέγμα
καμπυλών ισο-P/D, ισο-F) για έναν προωστήρα της σειράς Β.
25
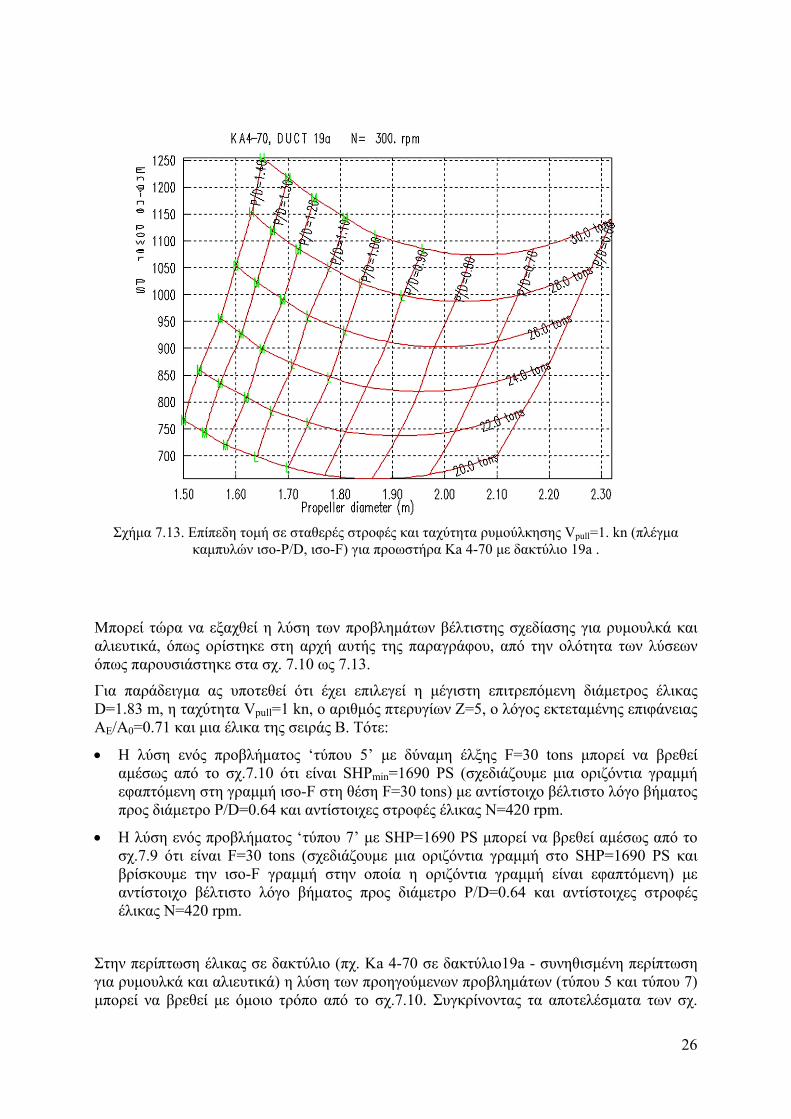
Σχήμα 7.13. Επίπεδη τομή σε σταθερές στροφές και ταχύτητα ρυμούλκησης Vpull=1. kn (πλέγμα
καμπυλών ισο-P/D, ισο-F) για προωστήρα Ka 4-70 με δακτύλιο 19a .
Μπορεί τώρα να εξαχθεί η λύση των προβλημάτων βέλτιστης σχεδίασης για ρυμουλκά και αλιευτικά, όπως ορίστηκε στη αρχή αυτής της παραγράφου, από την ολότητα των λύσεων όπως παρουσιάστηκε στα σχ. 7.10 ως 7.13.
Για παράδειγμα ας υποτεθεί ότι έχει επιλεγεί η μέγιστη επιτρεπόμενη διάμετρος έλικας D=1.83 m, η ταχύτητα Vpull=1 kn, ο αριθμός πτερυγίων Ζ=5, ο λόγος εκτεταμένης επιφάνειας ΑΕ/Α0=0.71 και μια έλικα της σειράς Β. Τότε:
• Η λύση ενός προβλήματος ‘τύπου 5’ με δύναμη έλξης F=30 tons μπορεί να βρεθεί αμέσως από το σχ.7.10 ότι είναι SHPmin=1690 PS (σχεδιάζουμε μια οριζόντια γραμμή εφαπτόμενη στη γραμμή ισο-F στη θέση F=30 tons) με αντίστοιχο βέλτιστο λόγο βήματος προς διάμετρο P/D=0.64 και αντίστοιχες στροφές έλικας Ν=420 rpm.
• Η λύση ενός προβλήματος ‘τύπου 7’ με SHP=1690 PS μπορεί να βρεθεί αμέσως από το σχ.7.9 ότι είναι F=30 tons (σχεδιάζουμε μια οριζόντια γραμμή στο SHP=1690 PS και βρίσκουμε την ισο-F γραμμή στην οποία η οριζόντια γραμμή είναι εφαπτόμενη) με αντίστοιχο βέλτιστο λόγο βήματος προς διάμετρο P/D=0.64 και αντίστοιχες στροφές έλικας Ν=420 rpm.
Στην περίπτωση έλικας σε δακτύλιο (πχ. Ka 4-70 σε δακτύλιο19a - συνηθισμένη περίπτωση για ρυμουλκά και αλιευτικά) η λύση των προηγούμενων προβλημάτων (τύπου 5 και τύπου 7) μπορεί να βρεθεί με όμοιο τρόπο από το σχ.7.10. Συγκρίνοντας τα αποτελέσματα των σχ.
26
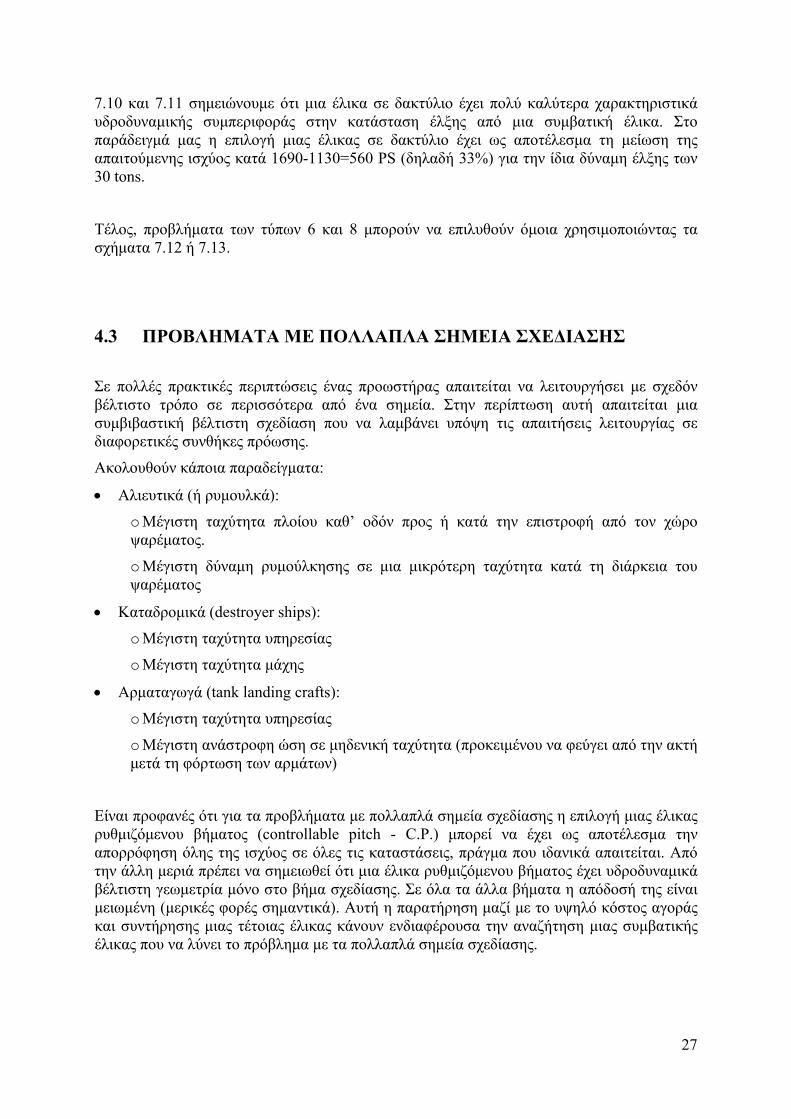
7.10 και 7.11 σημειώνουμε ότι μια έλικα σε δακτύλιο έχει πολύ καλύτερα χαρακτηριστικά υδροδυναμικής συμπεριφοράς στην κατάσταση έλξης από μια συμβατική έλικα. Στο παράδειγμά μας η επιλογή μιας έλικας σε δακτύλιο έχει ως αποτέλεσμα τη μείωση της απαιτούμενης ισχύος κατά 1690-1130=560 PS (δηλαδή 33%) για την ίδια δύναμη έλξης των 30 tons.
Τέλος, προβλήματα των τύπων 6 και 8 μπορούν να επιλυθούν όμοια χρησιμοποιώντας τα σχήματα 7.12 ή 7.13.
4.3 ΠΡΟΒΛΗΜΑΤΑ ΜΕ ΠΟΛΛΑΠΛΑ ΣΗΜΕΙΑ ΣΧΕΔΙΑΣΗΣ
Σε πολλές πρακτικές περιπτώσεις ένας προωστήρας απαιτείται να λειτουργήσει με σχεδόν βέλτιστο τρόπο σε περισσότερα από ένα σημεία. Στην περίπτωση αυτή απαιτείται μια συμβιβαστική βέλτιστη σχεδίαση που να λαμβάνει υπόψη τις απαιτήσεις λειτουργίας σε διαφορετικές συνθήκες πρόωσης.
Ακολουθούν κάποια παραδείγματα:
• Αλιευτικά (ή ρυμουλκά):
o Μέγιστη ταχύτητα πλοίου καθ’ οδόν προς ή κατά την επιστροφή από τον χώρο ψαρέματος.
o Μέγιστη δύναμη ρυμούλκησης σε μια μικρότερη ταχύτητα κατά τη διάρκεια του ψαρέματος
• Καταδρομικά (destroyer ships):
o Μέγιστη ταχύτητα υπηρεσίας
o Μέγιστη ταχύτητα μάχης
• Αρματαγωγά (tank landing crafts):
o Μέγιστη ταχύτητα υπηρεσίας
o Μέγιστη ανάστροφη ώση σε μηδενική ταχύτητα (προκειμένου να φεύγει από την ακτή μετά τη φόρτωση των αρμάτων)
Είναι προφανές ότι για τα προβλήματα με πολλαπλά σημεία σχεδίασης η επιλογή μιας έλικας ρυθμιζόμενου βήματος (controllable pitch - C.P.) μπορεί να έχει ως αποτέλεσμα την απορρόφηση όλης της ισχύος σε όλες τις καταστάσεις, πράγμα που ιδανικά απαιτείται. Από την άλλη μεριά πρέπει να σημειωθεί ότι μια έλικα ρυθμιζόμενου βήματος έχει υδροδυναμικά βέλτιστη γεωμετρία μόνο στο βήμα σχεδίασης. Σε όλα τα άλλα βήματα η απόδοσή της είναι μειωμένη (μερικές φορές σημαντικά). Αυτή η παρατήρηση μαζί με το υψηλό κόστος αγοράς και συντήρησης μιας τέτοιας έλικας κάνουν ενδιαφέρουσα την αναζήτηση μιας συμβατικής έλικας που να λύνει το πρόβλημα με τα πολλαπλά σημεία σχεδίασης.
27
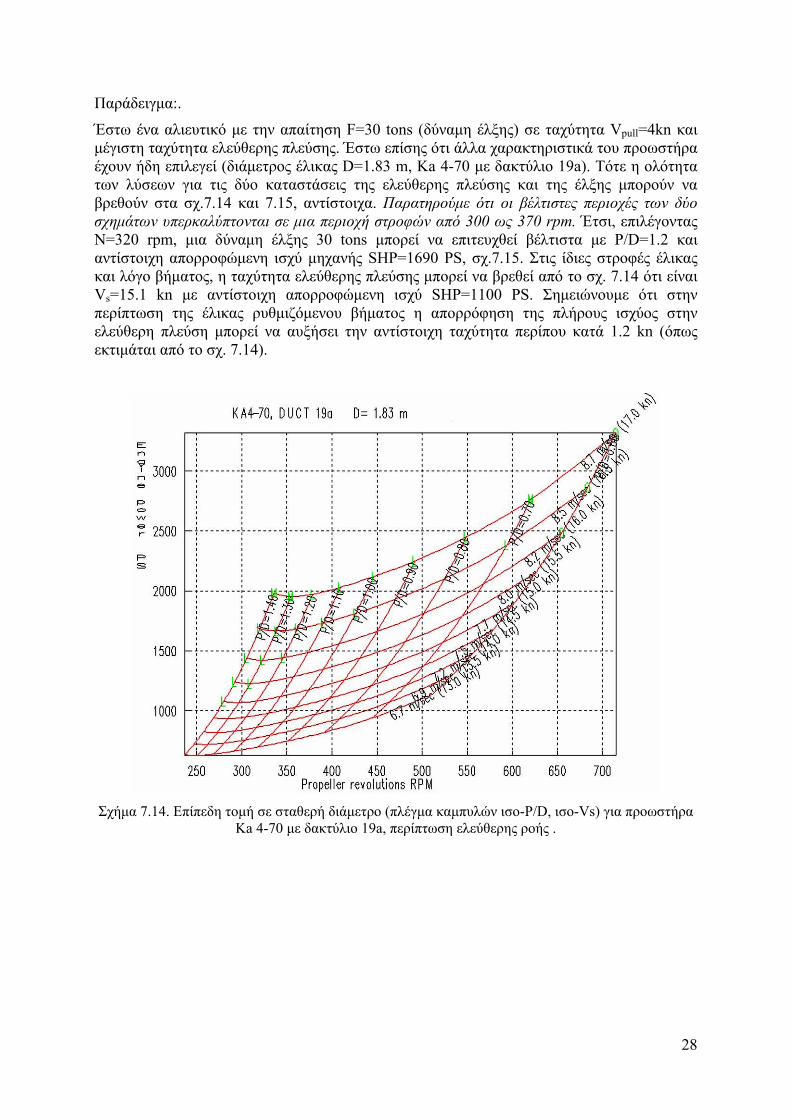
Παράδειγμα:.
Έστω ένα αλιευτικό με την απαίτηση F=30 tons (δύναμη έλξης) σε ταχύτητα Vpull=4kn και μέγιστη ταχύτητα ελεύθερης πλεύσης. Έστω επίσης ότι άλλα χαρακτηριστικά του προωστήρα έχουν ήδη επιλεγεί (διάμετρος έλικας D=1.83 m, Ka 4-70 με δακτύλιο 19a). Τότε η ολότητα των λύσεων για τις δύο καταστάσεις της ελεύθερης πλεύσης και της έλξης μπορούν να βρεθούν στα σχ.7.14 και 7.15, αντίστοιχα. Παρατηρούμε ότι οι βέλτιστες περιοχές των δύο σχημάτων υπερκαλύπτονται σε μια περιοχή στροφών από 300 ως 370 rpm. Έτσι, επιλέγοντας Ν=320 rpm, μια δύναμη έλξης 30 tons μπορεί να επιτευχθεί βέλτιστα με P/D=1.2 και αντίστοιχη απορροφώμενη ισχύ μηχανής SHP=1690 PS, σχ.7.15. Στις ίδιες στροφές έλικας και λόγο βήματος, η ταχύτητα ελεύθερης πλεύσης μπορεί να βρεθεί από το σχ. 7.14 ότι είναι Vs=15.1 kn με αντίστοιχη απορροφώμενη ισχύ SHP=1100 PS. Σημειώνουμε ότι στην περίπτωση της έλικας ρυθμιζόμενου βήματος η απορρόφηση της πλήρους ισχύος στην ελεύθερη πλεύση μπορεί να αυξήσει την αντίστοιχη ταχύτητα περίπου κατά 1.2 kn (όπως εκτιμάται από το σχ. 7.14).
Σχήμα 7.14. Επίπεδη τομή σε σταθερή διάμετρο (πλέγμα καμπυλών ισο-P/D, ισο-Vs) για προωστήρα
Ka 4-70 με δακτύλιο 19a, περίπτωση ελεύθερης ροής .
28
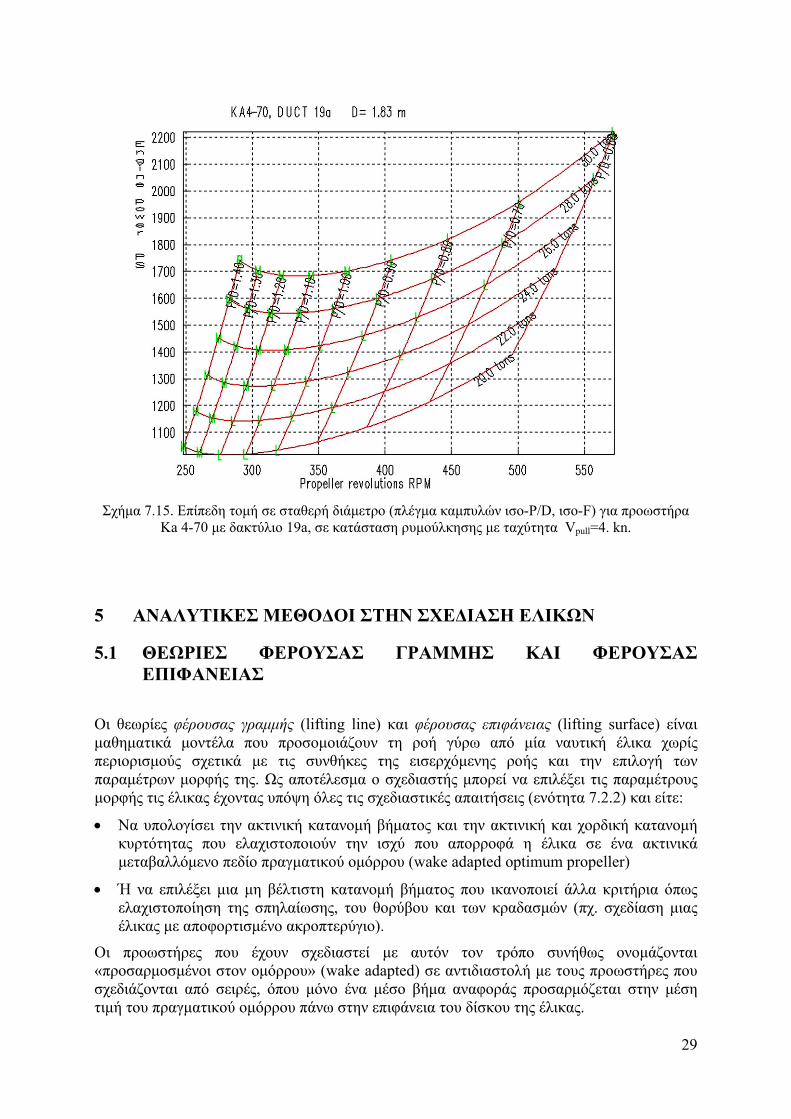
Σχήμα 7.15. Επίπεδη τομή σε σταθερή διάμετρο (πλέγμα καμπυλών ισο-P/D, ισο-F) για προωστήρα
Ka 4-70 με δακτύλιο 19a, σε κατάσταση ρυμούλκησης με ταχύτητα Vpull=4. kn.
5 ΑΝΑΛΥΤΙΚΕΣ ΜΕΘΟΔΟΙ ΣΤΗΝ ΣΧΕΔΙΑΣΗ ΕΛΙΚΩΝ
5.1 ΘΕΩΡΙΕΣ ΦΕΡΟΥΣΑΣ ΓΡΑΜΜΗΣ ΚΑΙ ΦΕΡΟΥΣΑΣ ΕΠΙΦΑΝΕΙΑΣ
Οι θεωρίες φέρουσας γραμμής (lifting line) και φέρουσας επιφάνειας (lifting surface) είναι μαθηματικά μοντέλα που προσομοιάζουν τη ροή γύρω από μία ναυτική έλικα χωρίς περιορισμούς σχετικά με τις συνθήκες της εισερχόμενης ροής και την επιλογή των παραμέτρων μορφής της. Ως αποτέλεσμα ο σχεδιαστής μπορεί να επιλέξει τις παραμέτρους μορφής τις έλικας έχοντας υπόψη όλες τις σχεδιαστικές απαιτήσεις (ενότητα 7.2.2) και είτε:
• Να υπολογίσει την ακτινική κατανομή βήματος και την ακτινική και χορδική κατανομή κυρτότητας που ελαχιστοποιούν την ισχύ που απορροφά η έλικα σε ένα ακτινικά μεταβαλλόμενο πεδίο πραγματικού ομόρρου (wake adapted optimum propeller)
• Ή να επιλέξει μια μη βέλτιστη κατανομή βήματος που ικανοποιεί άλλα κριτήρια όπως ελαχιστοποίηση της σπηλαίωσης, του θορύβου και των κραδασμών (πχ. σχεδίαση μιας έλικας με αποφορτισμένο ακροπτερύγιο).
Οι προωστήρες που έχουν σχεδιαστεί με αυτόν τον τρόπο συνήθως ονομάζονται «προσαρμοσμένοι στον ομόρρου» (wake adapted) σε αντιδιαστολή με τους προωστήρες που σχεδιάζονται από σειρές, όπου μόνο ένα μέσο βήμα αναφοράς προσαρμόζεται στην μέση τιμή του πραγματικού ομόρρου πάνω στην επιφάνεια του δίσκου της έλικας.
29
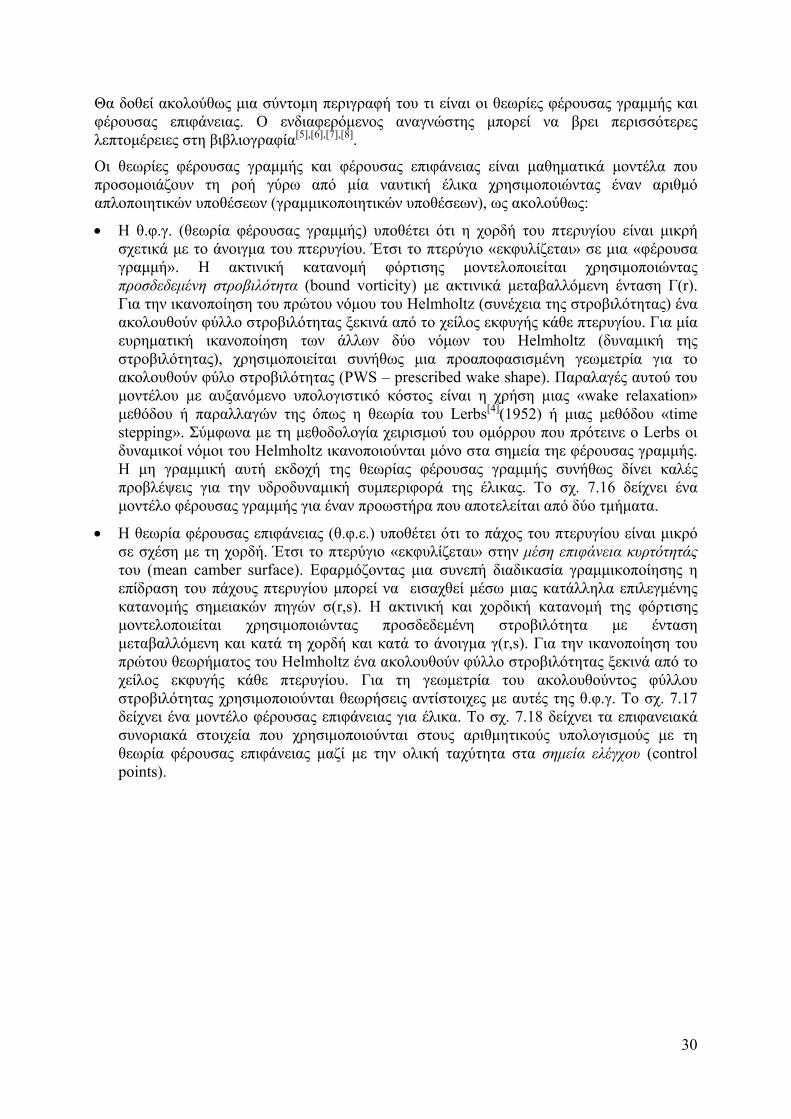
Θα δοθεί ακολούθως μια σύντομη περιγραφή του τι είναι οι θεωρίες φέρουσας γραμμής και φέρουσας επιφάνειας. Ο ενδιαφερόμενος αναγνώστης μπορεί να βρει περισσότερες λεπτομέρειες στη βιβλιογραφία[5],[6],[7],[8].
Οι θεωρίες φέρουσας γραμμής και φέρουσας επιφάνειας είναι μαθηματικά μοντέλα που προσομοιάζουν τη ροή γύρω από μία ναυτική έλικα χρησιμοποιώντας έναν αριθμό απλοποιητικών υποθέσεων (γραμμικοποιητικών υποθέσεων), ως ακολούθως:
• Η θ.φ.γ. (θεωρία φέρουσας γραμμής) υποθέτει ότι η χορδή του πτερυγίου είναι μικρή σχετικά με το άνοιγμα του πτερυγίου. Έτσι το πτερύγιο «εκφυλίζεται» σε μια «φέρουσα γραμμή». Η ακτινική κατανομή φόρτισης μοντελοποιείται χρησιμοποιώντας προσδεδεμένη στροβιλότητα (bound vorticity) με ακτινικά μεταβαλλόμενη ένταση Γ(r). Για την ικανοποίηση του πρώτου νόμου του Helmholtz (συνέχεια της στροβιλότητας) ένα ακολουθούν φύλλο στροβιλότητας ξεκινά από το χείλος εκφυγής κάθε πτερυγίου. Για μία ευρηματική ικανοποίηση των άλλων δύο νόμων του Helmholtz (δυναμική της στροβιλότητας), χρησιμοποιείται συνήθως μια προαποφασισμένη γεωμετρία για το ακολουθούν φύλο στροβιλότητας (PWS – prescribed wake shape). Παραλαγές αυτού του μοντέλου με αυξανόμενο υπολογιστικό κόστος είναι η χρήση μιας «wake relaxation» μεθόδου ή παραλλαγών της όπως η θεωρία του Lerbs[4](1952) ή μιας μεθόδου «time stepping». Σύμφωνα με τη μεθοδολογία χειρισμού του ομόρρου που πρότεινε ο Lerbs οι δυναμικοί νόμοι του Helmholtz ικανοποιούνται μόνο στα σημεία τηε φέρουσας γραμμής. Η μη γραμμική αυτή εκδοχή της θεωρίας φέρουσας γραμμής συνήθως δίνει καλές προβλέψεις για την υδροδυναμική συμπεριφορά της έλικας. Το σχ. 7.16 δείχνει ένα μοντέλο φέρουσας γραμμής για έναν προωστήρα που αποτελείται από δύο τμήματα.
• Η θεωρία φέρουσας επιφάνειας (θ.φ.ε.) υποθέτει ότι το πάχος του πτερυγίου είναι μικρό σε σχέση με τη χορδή. Έτσι το πτερύγιο «εκφυλίζεται» στην μέση επιφάνεια κυρτότητάς του (mean camber surface). Εφαρμόζοντας μια συνεπή διαδικασία γραμμικοποίησης η επίδραση του πάχους πτερυγίου μπορεί να εισαχθεί μέσω μιας κατάλληλα επιλεγμένης κατανομής σημειακών πηγών σ(r,s). Η ακτινική και χορδική κατανομή της φόρτισης μοντελοποιείται χρησιμοποιώντας προσδεδεμένη στροβιλότητα με ένταση μεταβαλλόμενη και κατά τη χορδή και κατά το άνοιγμα γ(r,s). Για την ικανοποίηση του πρώτου θεωρήματος του Helmholtz ένα ακολουθούν φύλλο στροβιλότητας ξεκινά από το χείλος εκφυγής κάθε πτερυγίου. Για τη γεωμετρία του ακολουθούντος φύλλου στροβιλότητας χρησιμοποιούνται θεωρήσεις αντίστοιχες με αυτές της θ.φ.γ. Το σχ. 7.17 δείχνει ένα μοντέλο φέρουσας επιφάνειας για έλικα. Το σχ. 7.18 δείχνει τα επιφανειακά συνοριακά στοιχεία που χρησιμοποιούνται στους αριθμητικούς υπολογισμούς με τη θεωρία φέρουσας επιφάνειας μαζί με την ολική ταχύτητα στα σημεία ελέγχου (control points).
30
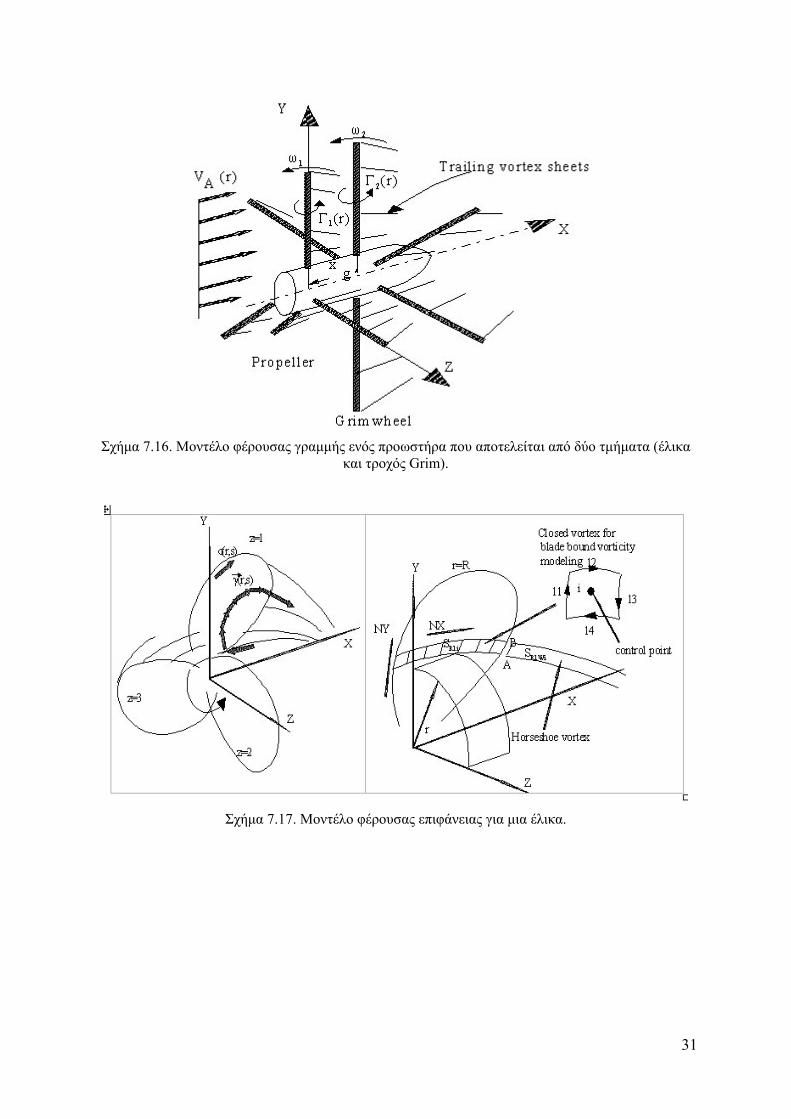
Σχήμα 7.16. Μοντέλο φέρουσας γραμμής ενός προωστήρα που αποτελείται από δύο τμήματα (έλικα
και τροχός Grim).
Σχήμα 7.17. Μοντέλο φέρουσας επιφάνειας για μια έλικα.
31
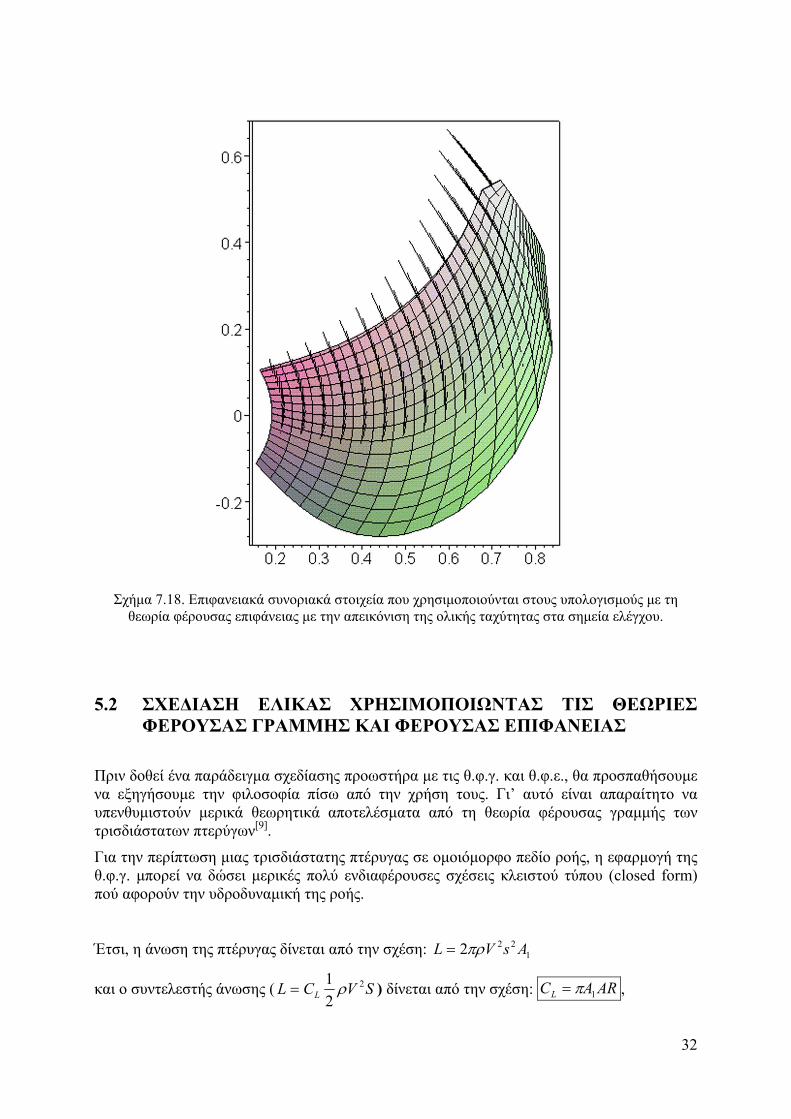
Σχήμα 7.18. Επιφανειακά συνοριακά στοιχεία που χρησιμοποιούνται στους υπολογισμούς με τη θεωρία φέρουσας επιφάνειας με την απεικόνιση της ολικής ταχύτητας στα σημεία ελέγχου.
5.2 ΣΧΕΔΙΑΣΗ ΕΛΙΚΑΣ ΧΡΗΣΙΜΟΠΟΙΩΝΤΑΣ ΤΙΣ ΘΕΩΡΙΕΣ ΦΕΡΟΥΣΑΣ ΓΡΑΜΜΗΣ ΚΑΙ ΦΕΡΟΥΣΑΣ ΕΠΙΦΑΝΕΙΑΣ
Πριν δοθεί ένα παράδειγμα σχεδίασης προωστήρα με τις θ.φ.γ. και θ.φ.ε., θα προσπαθήσουμε να εξηγήσουμε την φιλοσοφία πίσω από την χρήση τους. Γι’ αυτό είναι απαραίτητο να υπενθυμιστούν μερικά θεωρητικά αποτελέσματα από τη θεωρία φέρουσας γραμμής των τρισδιάστατων πτερύγων[9].
Για την περίπτωση μιας τρισδιάστατης πτέρυγας σε ομοιόμορφο πεδίο ροής, η εφαρμογή της θ.φ.γ. μπορεί να δώσει μερικές πολύ ενδιαφέρουσες σχέσεις κλειστού τύπου (closed form) πού αφορούν την υδροδυναμική της ροής.
Έτσι, η άνωση της πτέρυγας δίνεται από την σχέση: 1222 AsVL πρ=
και ο συντελεστής άνωσης ( SVCL L21 ρ=
2) δίνεται από την σχέση: ARACL 1π= ,
32
όπου:
το 2(2 ) = sAR
S είναι ο λόγος επιμήκους (aspect ratio), το S είναι η επιφάνεια της πτέρυγας, 2s
το άνοιγμα (span) της πτέρυγας, A1 είναι ο πρώτος συντελεστής σε μια ανάπτυξη σε σειρά ημίτονου της κατανομής της προσδεδεμένης κυκλοφορίας ( ), y s y sΓ − ≤ ≤
( , ∑∞
=Γ1
sin4)( θθ nAsV n θcossy −= ) και V είναι η αδιατάραχτη ταχύτητα στο άπειρο.
Ο συντελεστής επαγόμενης αντίστασης (induced drag coefficient) της πτέρυγας
( 212I DID C V Sρ= ) δίνεται από την σχέση: ( δ
π+= 1
2
ARCC L
DI ) , όπου δ είναι ένας θετικός
αριθμός που δίνεται από την σχέση: ...43221
24
21
23
21
22 +++=
AA
AA
AAδ και που εξαρτάται από τις
λεπτομέρειες της μορφής της φόρτισης κατά μήκος του ανοίγματος.
Θα δούμε τώρα ποιες είναι οι συνέπειες των προηγούμενων σχέσεων στην σχεδίαση της πτέρυγας. Υποθέτοντας σταθερό CL, υπάρχει ένα απόλυτο ελάχιστο για την επαγόμενη αντίσταση CDI, το οποίο μπορεί να επιτευχθεί αν δ=0, δηλαδή A2=A3=A4=…=0, που είναι ισοδύναμο με μια ελλειπτική κατανομή φόρτισης κατά το άνοιγμα (spanwise elliptical loading distribution). Για να επιτευχθεί η κατανομή αυτή της φόρτισης τα γεωμετρικά μεγέθη της πτέρυγας πρέπει να ικανοποιούν την ολοκληρο-διαφορική εξίσωση του μονοπλάνου[8] (monoplane equation). Δηλαδή σε κάθε θέση κατά μήκος του ανοίγματος η τοπική χορδή, η τοπική γεωμετρική γωνία πρόσπτωσης και η τοπική γεωμετρία της υδροτομής (μορφή πάχους, γραμμή κυρτότητας) πρέπει να συσχετίζονται με τον απολύτως συγκεκριμένο τρόπο που καθορίζει η εξίσωση του μονοπλάνου. Η γεωμετρία μιας πτέρυγας όμως καθορίζεται και από άλλους παράγοντες ο κυριότερος από τους οποίους είναι η επαρκής αντοχή και η στήριξη της (π.χ. στο σώμα του αεροπλάνου για την περίπτωση πτερυγίου ή στην πλήμνη για την περίπτωση της έλικας). Έτσι υπάρχουν λόγοι που το απόλυτο ελάχιστο να μη μπορεί να επιτευχθεί.
Οι συστηματικές σειρές ελίκων εισάγουν ισχυρούς περιορισμούς στη γεωμετρία της έλικας περιορίζοντας τις ακτινικές κατανομές χορδών, πλευρικής και διαμήκους απόκλισης, βήματος και κυρτότητας και αφήνοντας ελεύθερο μόνο έναν «ονομαστικό» λόγο βήματος P/D (συνήθως σταθερό κατά μήκος του ανοίγματος). Σαν αποτέλεσμα το βέλτιστο που θα επιτευχθεί από την αναζήτηση με συστηματικές σειρές είναι μακριά από το βέλτιστο που μπορεί να αναζητηθεί με αναλυτικές μεθόδους όπου όλες οι παράμετροι μορφής της έλικας είναι ελεύθερες. Παρά τούτο είναι συνηθισμένο οι συστηματικές σειρές να χρησιμοποιούνται σε ένα προκαταρκτικό στάδιο σχεδίασης για να αποκτηθεί μια εικόνα σχετικά με το βέλτιστο σημείο σχεδίασης (π.χ. βέλτιστο P/D και αντίστοιχες βέλτιστες στροφές).
Τέλος να σημειωθεί ότι υπάρχουν λόγοι (βλέπε παράγραφο 7.2.2) για τους οποίους η κατανομή φόρτισης πρέπει να είναι διαφορετική από την βέλτιστη. Για παράδειγμα έλικες με αποφορτισμένο το ακροπτερύγιο (unloaded tip) φτιάχνονται πολύ συχνά σήμερα για λόγους μείωσης των διεγέρσεων των κραδασμών στη γάστρα. Είναι φανερό ότι το πρόβλημα σχεδίασης ή υπολογισμού συμπεριφοράς τέτοιων ελίκων μπορεί να επιλυθεί μόνο με χρήση αναλυτικών μεθόδων.
33
Στις πρακτικές εφαρμογές η αναλυτική μέθοδος σχεδίασης (θ.φ.γ./θ.φ.ε.) χρησιμοποιείται συνήθως για την επίλυση των ακολούθων καλώς τεθειμένων προβλημάτων:
Πρόβλημα Α (πρόβλημα βέλτιστης σχεδίασης):
Δίνονται:
• Ταχύτητα πλοίου και κατανομή πραγματικού ομόρρου (έτσι η ακτινική κατανομή του πραγματικού ποσοστού ομόρρου θεωρείται γνωστή και, υποθέτοντας επίσης ότι ο συντελεστής μείωσης ώσης t είναι γνωστός, η ώση της έλικας μπορεί να υπολογιστεί)
• Οι στροφές της έλικας
• Η χορδική κατανομή της φόρτισης (πχ. NACA a=0.8- με βάση κριτήρια σπηλαίωσης)
• Απαίτηση μεγιστοποίησης της απόδοσης της έλικας της προσαρμοσμένης στον ομόρρου,
Υπολογίζονται:
• Η ακτινική κατανομή του βήματος και η ακτινική και χορδική κατανομή της κυρτότητας.
Πρόβλημα Β (πρόβλημα σχεδίασης με περιορισμούς ισοτήτων – όχι βέλτιστο!): Δίνονται:
• Ταχύτητα πλοίου και κατανομή πραγματικού ομόρρου (έτσι η ακτινική κατανομή του πραγματικού ποσοστού ομόρρου θεωρείται γνωστή και, υποθέτοντας επίσης ότι ο συντελεστής μείωσης ώσης t είναι γνωστός, η ώση της έλικας μπορεί να υπολογιστεί)
• Οι στροφές της έλικας
• Η ακτινική και η χορδική κατανομή της φόρτισης
Υπολογίζονται:
• Η ακτινική κατανομή του βήματος και η ακτινική και χορδική κατανομή της κυρτότητας.
Συγκρίνοντας τα δύο προβλήματα παρατηρούμε ότι για το πρώτο απαιτείται μέγιστη απόδοση (π.χ. ελαχιστοποίηση της ισχύος σε δεδομένη ταχύτητα). Για το δεύτερο η απαίτηση μέγιστης απόδοσης έχει αντικατασταθεί από δεδομένη κατανομή φόρτισης κατά το άνοιγμα.
Σημειώνουμε ότι για να είναι τα προβλήματα καλώς τεθειμένα πρέπει να είναι γνωστά επιπλέον τα ακόλουθα δεδομένα:
• Οι διάμετροι της πλήμνης (hub, boss) και του ακροπτερυγίου.
• Η κατανομή των χορδών, της πλευρικής και της διαμήκους απόκλισης.
• Η κατανομή πάχους του πτερυγίου.
Η μεθοδολογία επιλογής για τα παραπάνω δεδομένα, με την εξαίρεση της χορδικής και ακτινικής κατανομής της φόρτισης, ήταν το αντικείμενο της παραγράφου 7.2. Σχετικά με την επιλογή της ακτινικής φόρτισης τονίζεται ότι σχεδιάζοντας προσεκτικά την ακτινική κατανομή φόρτισης στην περιοχή του ακροπτερυγίου μπορούμε να έχουμε μια έλικα με αποφορτισμένο ακροπτερύγιο, η οποία έχει πλεονεκτήματα σχετικά με τους κραδασμούς και το θόρυβο.
34
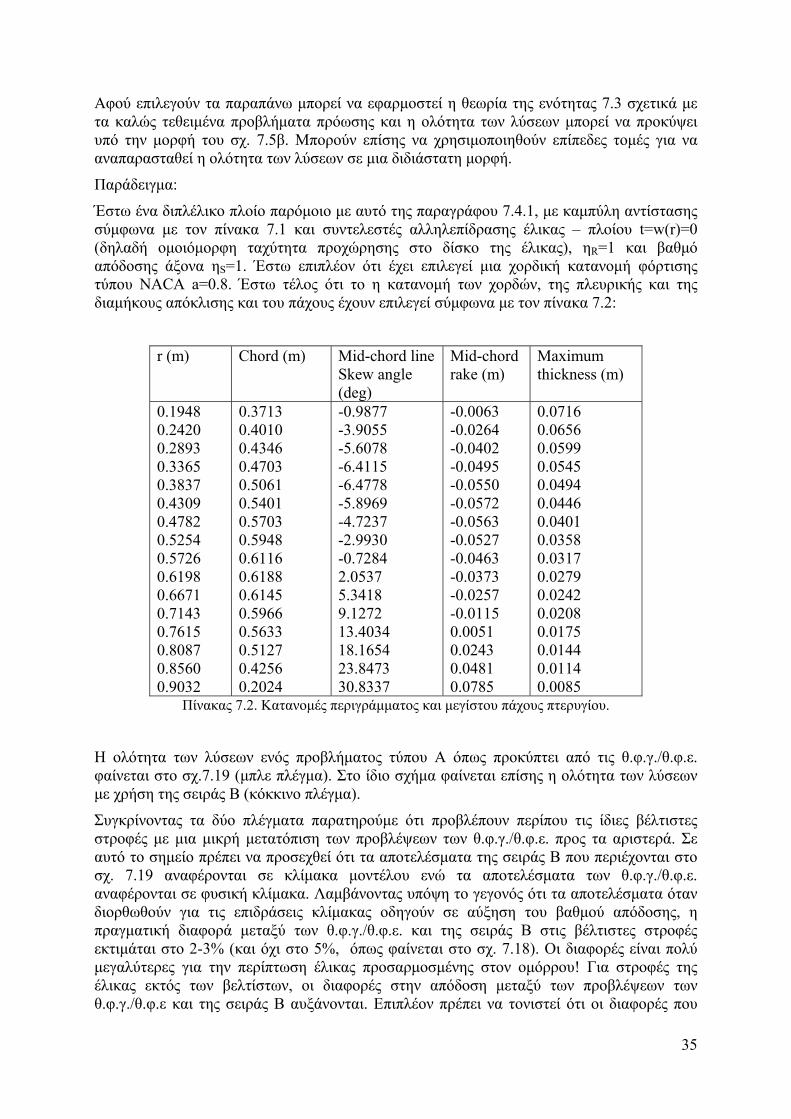
Αφού επιλεγούν τα παραπάνω μπορεί να εφαρμοστεί η θεωρία της ενότητας 7.3 σχετικά με τα καλώς τεθειμένα προβλήματα πρόωσης και η ολότητα των λύσεων μπορεί να προκύψει υπό την μορφή του σχ. 7.5β. Μπορούν επίσης να χρησιμοποιηθούν επίπεδες τομές για να αναπαρασταθεί η ολότητα των λύσεων σε μια διδιάστατη μορφή.
Παράδειγμα:
Έστω ένα διπλέλικο πλοίο παρόμοιο με αυτό της παραγράφου 7.4.1, με καμπύλη αντίστασης σύμφωνα με τον πίνακα 7.1 και συντελεστές αλληλεπίδρασης έλικας – πλοίου t=w(r)=0 (δηλαδή ομοιόμορφη ταχύτητα προχώρησης στο δίσκο της έλικας), ηR=1 και βαθμό απόδοσης άξονα ηS=1. Έστω επιπλέον ότι έχει επιλεγεί μια χορδική κατανομή φόρτισης τύπου NACA a=0.8. Έστω τέλος ότι το η κατανομή των χορδών, της πλευρικής και της διαμήκους απόκλισης και του πάχους έχουν επιλεγεί σύμφωνα με τον πίνακα 7.2:
r (m) Chord (m) Mid-chord line Skew angle (deg)
Mid-chord rake (m)
Maximum thickness (m)
0.1948 0.2420 0.2893 0.3365 0.3837 0.4309 0.4782 0.5254 0.5726 0.6198 0.6671 0.7143 0.7615 0.8087 0.8560 0.9032
0.3713 0.4010 0.4346 0.4703 0.5061 0.5401 0.5703 0.5948 0.6116 0.6188 0.6145 0.5966 0.5633 0.5127 0.4256 0.2024
-0.9877 -3.9055 -5.6078 -6.4115 -6.4778 -5.8969 -4.7237 -2.9930 -0.7284 2.0537 5.3418 9.1272 13.4034 18.1654 23.8473 30.8337
-0.0063 -0.0264 -0.0402 -0.0495 -0.0550 -0.0572 -0.0563 -0.0527 -0.0463 -0.0373 -0.0257 -0.0115 0.0051 0.0243 0.0481 0.0785
0.0716 0.0656 0.0599 0.0545 0.0494 0.0446 0.0401 0.0358 0.0317 0.0279 0.0242 0.0208 0.0175 0.0144 0.0114 0.0085
Πίνακας 7.2. Κατανομές περιγράμματος και μεγίστου πάχους πτερυγίου.
Η ολότητα των λύσεων ενός προβλήματος τύπου Α όπως προκύπτει από τις θ.φ.γ./θ.φ.ε. φαίνεται στο σχ.7.19 (μπλε πλέγμα). Στο ίδιο σχήμα φαίνεται επίσης η ολότητα των λύσεων με χρήση της σειράς Β (κόκκινο πλέγμα).
Συγκρίνοντας τα δύο πλέγματα παρατηρούμε ότι προβλέπουν περίπου τις ίδιες βέλτιστες στροφές με μια μικρή μετατόπιση των προβλέψεων των θ.φ.γ./θ.φ.ε. προς τα αριστερά. Σε αυτό το σημείο πρέπει να προσεχθεί ότι τα αποτελέσματα της σειράς Β που περιέχονται στο σχ. 7.19 αναφέρονται σε κλίμακα μοντέλου ενώ τα αποτελέσματα των θ.φ.γ./θ.φ.ε. αναφέρονται σε φυσική κλίμακα. Λαμβάνοντας υπόψη το γεγονός ότι τα αποτελέσματα όταν διορθωθούν για τις επιδράσεις κλίμακας οδηγούν σε αύξηση του βαθμού απόδοσης, η πραγματική διαφορά μεταξύ των θ.φ.γ./θ.φ.ε. και της σειράς Β στις βέλτιστες στροφές εκτιμάται στο 2-3% (και όχι στο 5%, όπως φαίνεται στο σχ. 7.18). Οι διαφορές είναι πολύ μεγαλύτερες για την περίπτωση έλικας προσαρμοσμένης στον ομόρρου! Για στροφές της έλικας εκτός των βελτίστων, οι διαφορές στην απόδοση μεταξύ των προβλέψεων των θ.φ.γ./θ.φ.ε και της σειράς Β αυξάνονται. Επιπλέον πρέπει να τονιστεί ότι οι διαφορές που
35
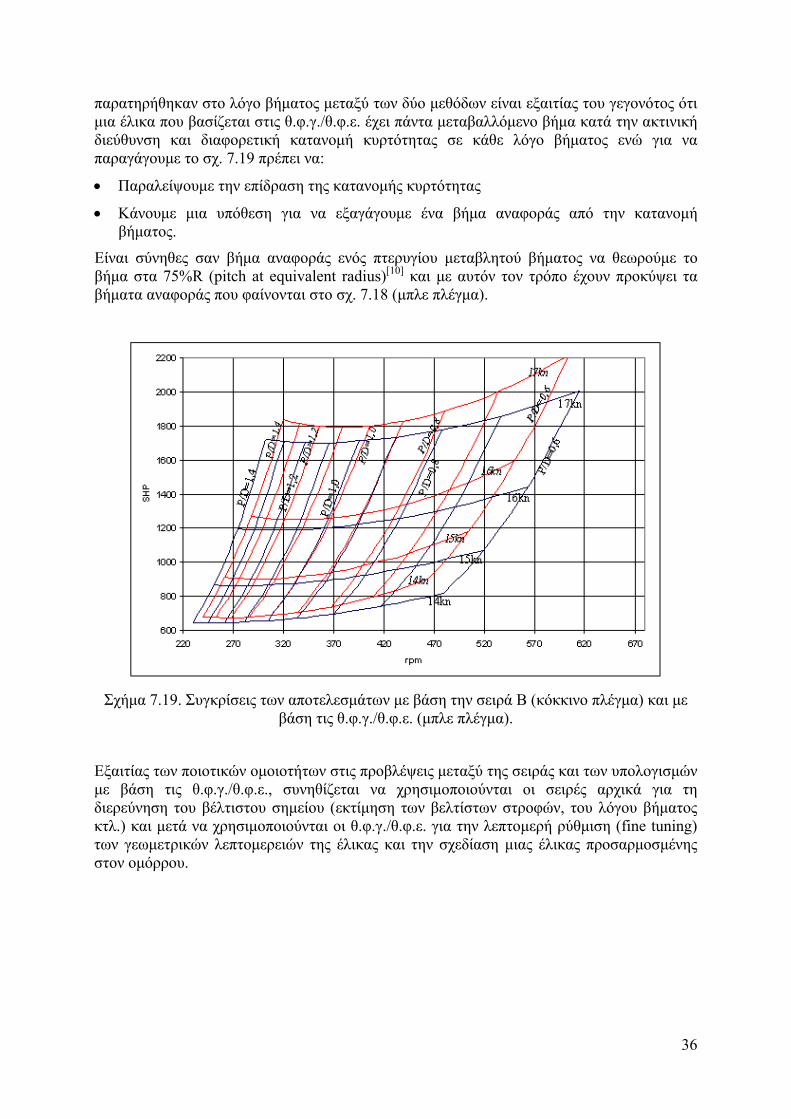
παρατηρήθηκαν στο λόγο βήματος μεταξύ των δύο μεθόδων είναι εξαιτίας του γεγονότος ότι μια έλικα που βασίζεται στις θ.φ.γ./θ.φ.ε. έχει πάντα μεταβαλλόμενο βήμα κατά την ακτινική διεύθυνση και διαφορετική κατανομή κυρτότητας σε κάθε λόγο βήματος ενώ για να παραγάγουμε το σχ. 7.19 πρέπει να:
• Παραλείψουμε την επίδραση της κατανομής κυρτότητας
• Κάνουμε μια υπόθεση για να εξαγάγουμε ένα βήμα αναφοράς από την κατανομή βήματος.
Είναι σύνηθες σαν βήμα αναφοράς ενός πτερυγίου μεταβλητού βήματος να θεωρούμε το βήμα στα 75%R (pitch at equivalent radius)[10] και με αυτόν τον τρόπο έχουν προκύψει τα βήματα αναφοράς που φαίνονται στο σχ. 7.18 (μπλε πλέγμα).
Σχήμα 7.19. Συγκρίσεις των αποτελεσμάτων με βάση την σειρά Β (κόκκινο πλέγμα) και με
βάση τις θ.φ.γ./θ.φ.ε. (μπλε πλέγμα).
Εξαιτίας των ποιοτικών ομοιοτήτων στις προβλέψεις μεταξύ της σειράς και των υπολογισμών με βάση τις θ.φ.γ./θ.φ.ε., συνηθίζεται να χρησιμοποιούνται οι σειρές αρχικά για τη διερεύνηση του βέλτιστου σημείου (εκτίμηση των βελτίστων στροφών, του λόγου βήματος κτλ.) και μετά να χρησιμοποιούνται οι θ.φ.γ./θ.φ.ε. για την λεπτομερή ρύθμιση (fine tuning) των γεωμετρικών λεπτομερειών της έλικας και την σχεδίαση μιας έλικας προσαρμοσμένης στον ομόρρου.
36

5.3 Η ΜΕΘΟΔΟΣ ΣΥΝΟΡΙΑΚΩΝ ΣΤΟΙΧΕΙΩΝ ΓΙΑ ΤΑ ΜΟΝΙΜΑ ΚΑΙ ΤΑ ΜΗ ΜΟΝΙΜΑ ΠΡΟΒΛΗΜΑΤΑ ΑΝΑΛΥΣΗΣ ΤΩΝ ΕΛΙΚΩΝ
Η μέθοδος συνοριακών στοιχείων (surface panel ή boundary element method) είναι μια μεγάλη καινοτομία στους υπολογισμούς συμπεριφοράς της έλικας για το μόνιμο και το μη μόνιμο πρόβλημα. Αν και οι θ.φ.γ./θ.φ.ε. και οι μέθοδοι συνοριακών στοιχείων μπορούν να επιλύσουν παρόμοια προβλήματα, οι δεύτερες προσεγγίζουν την πραγματική γεωμετρία έλικας-δακτυλίου-πλήμνης χωρίς γραμμικοποιητικές υποθέσεις σε σχέση με τη χορδή, την κυρτότητα και το πάχος. Έτσι μπορούν να προβλέψουν την κατανομή πίεσης του πτερυγίου (και του δακτυλίου) με πολύ μεγαλύτερη ακρίβεια από τις πρώτες. Γι’ αυτό και οι κώδικες συνοριακών στοιχείων μπορούν να χρησιμοποιηθούν στο τελευταίο στάδιο της σχεδίασης ενός προωστήρα για να προβλέψουν τις μόνιμες και μη μόνιμες κατανομές πίεσης στο πτερύγιο (ιδιαίτερα στην περιοχή του χείλους πρόσπτωσης) επιτρέποντας έτσι στον σχεδιαστή να διακρίνει και να διορθώσει πιθανά προβλήματα έναρξης σπηλαίωσης.
Η μέθοδος που περιγράφεται στη συνέχεια έχει αναπτυχθεί από τον γράφοντα και βασίζεται σε μια τροποποίηση της μεθόδου των Hess και Valarezo[11]. Λεπτομερή αποτελέσματα αυτής της μεθόδου έχουν παρουσιαστεί σε ένα συνέδριο της ITTC πάνω στις μεθόδους συνοριακών στοιχείων και στις εξισώσεις Navier – Stokes (RANS) στην Grenoble[12]. Μια μέθοδος συνοριακών στοιχείων για το μη μόνιμο πρόβλημα συμπεριφοράς έχει επίσης αναπτυχθεί αλλά δεν θα παρουσιαστεί εδώ. Λεπτομέρειες της αντίστοιχης μεθόδου δίνονται στη βιβλιογραφία[13].
Μια σύντομη περιγραφή των βασικών μαθηματικών σχέσεων που στηρίζεται η μέθοδος των συνοριακών στοιχείων για το μόνιμο πρόβλημα, έχει ως εξής:
Η ΟΛΟΚΛΗΡΩΤΙΚΗ ΕΞΙΣΩΣΗ: H συνοριακή ολοκληρωτική εξίσωση για τον προσδιορισμό της επιφανειακής κατανομής πηγών και στροβιλότητας που χρησιμοποιείται για την μοντελοποίηση της ροής γύρω από τον συνδυασμό πτερυγίου έλικας – πλήμνης - δακτύλιου (αν υπάρχει δακτύλιος), είναι η ακόλουθη:
∫∫∫∫×
−⋅=−×
+ ∞
WB S
fb
S
dSr
rnnVqdS
rr
rrqn )(
41
21)(
41
333
γπ
γπ
,
όπου:
SB είναι η επιφάνεια πτερυγίου+(πλήμνης +δακτυλίου)
SW είναι η επιφάνεια του ακολουθούντος φύλλου στροβιλότητας (έλικας +δακτυλίου)
n είναι ένα μοναδιαίο διάνυσμα, κάθετο στο σημείο ελέγχου
q είναι η άγνωστη επιφανειακή κατανομή πηγών
bγ είναι η άγνωστη κατανομή προσδεδεμένης στροβιλότητας
fγ είναι η κατανομή στροβιλότητας στο ακολουθούν φύλλο
∞V είναι η αδιατάραχτη ταχύτητα του ρευστού στο σημείο ελέγχου (ένας συνδυασμός μεταφορικής, περιστροφικής ταχύτητας και ταχύτητας του πραγματικού ομόρρου).
37
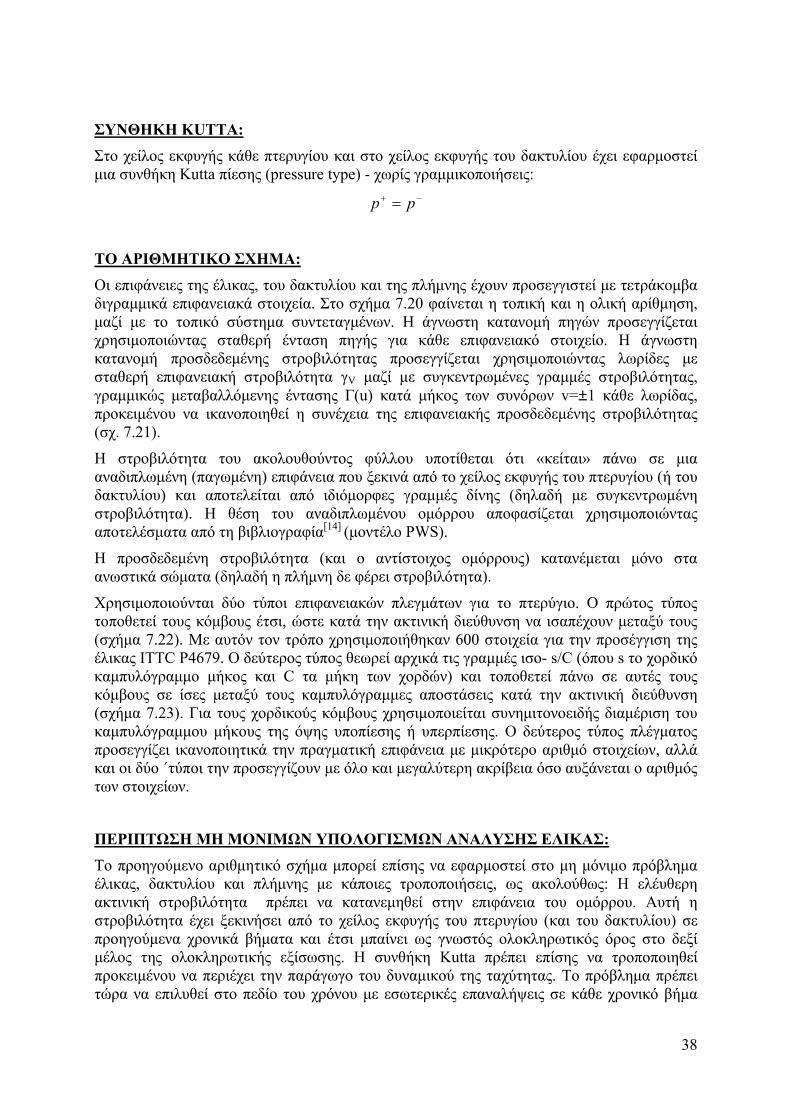
ΣΥΝΘΗΚΗ KUTTA: Στο χείλος εκφυγής κάθε πτερυγίου και στο χείλος εκφυγής του δακτυλίου έχει εφαρμοστεί μια συνθήκη Κutta πίεσης (pressure type) - χωρίς γραμμικοποιήσεις:
−+ = pp
ΤΟ ΑΡΙΘΜΗΤΙΚΟ ΣΧΗΜΑ: Οι επιφάνειες της έλικας, του δακτυλίου και της πλήμνης έχουν προσεγγιστεί με τετράκομβα διγραμμικά επιφανειακά στοιχεία. Στο σχήμα 7.20 φαίνεται η τοπική και η ολική αρίθμηση, μαζί με το τοπικό σύστημα συντεταγμένων. Η άγνωστη κατανομή πηγών προσεγγίζεται χρησιμοποιώντας σταθερή ένταση πηγής για κάθε επιφανειακό στοιχείο. Η άγνωστη κατανομή προσδεδεμένης στροβιλότητας προσεγγίζεται χρησιμοποιώντας λωρίδες με σταθερή επιφανειακή στροβιλότητα γV μαζί με συγκεντρωμένες γραμμές στροβιλότητας, γραμμικώς μεταβαλλόμενης έντασης Γ(u) κατά μήκος των συνόρων v=±1 κάθε λωρίδας, προκειμένου να ικανοποιηθεί η συνέχεια της επιφανειακής προσδεδεμένης στροβιλότητας (σχ. 7.21).
Η στροβιλότητα του ακολουθούντος φύλλου υποτίθεται ότι «κείται» πάνω σε μια αναδιπλωμένη (παγωμένη) επιφάνεια που ξεκινά από το χείλος εκφυγής του πτερυγίου (ή του δακτυλίου) και αποτελείται από ιδιόμορφες γραμμές δίνης (δηλαδή με συγκεντρωμένη στροβιλότητα). Η θέση του αναδιπλωμένου ομόρρου αποφασίζεται χρησιμοποιώντας αποτελέσματα από τη βιβλιογραφία[14] (μοντέλο PWS).
Η προσδεδεμένη στροβιλότητα (και ο αντίστοιχος ομόρρους) κατανέμεται μόνο στα ανωστικά σώματα (δηλαδή η πλήμνη δε φέρει στροβιλότητα).
Χρησιμοποιούνται δύο τύποι επιφανειακών πλεγμάτων για το πτερύγιο. Ο πρώτος τύπος τοποθετεί τους κόμβους έτσι, ώστε κατά την ακτινική διεύθυνση να ισαπέχουν μεταξύ τους (σχήμα 7.22). Με αυτόν τον τρόπο χρησιμοποιήθηκαν 600 στοιχεία για την προσέγγιση της έλικας ITTC P4679. Ο δεύτερος τύπος θεωρεί αρχικά τις γραμμές ισο- s/C (όπου s το χορδικό καμπυλόγραμμο μήκος και C τα μήκη των χορδών) και τοποθετεί πάνω σε αυτές τους κόμβους σε ίσες μεταξύ τους καμπυλόγραμμες αποστάσεις κατά την ακτινική διεύθυνση (σχήμα 7.23). Για τους χορδικούς κόμβους χρησιμοποιείται συνημιτονοειδής διαμέριση του καμπυλόγραμμου μήκους της όψης υποπίεσης ή υπερπίεσης. Ο δεύτερος τύπος πλέγματος προσεγγίζει ικανοποιητικά την πραγματική επιφάνεια με μικρότερο αριθμό στοιχείων, αλλά και οι δύο ΄τύποι την προσεγγίζουν με όλο και μεγαλύτερη ακρίβεια όσο αυξάνεται ο αριθμός των στοιχείων.
ΠΕΡΙΠΤΩΣΗ ΜΗ ΜΟΝΙΜΩΝ ΥΠΟΛΟΓΙΣΜΩΝ ΑΝΑΛΥΣΗΣ ΕΛΙΚΑΣ: Το προηγούμενο αριθμητικό σχήμα μπορεί επίσης να εφαρμοστεί στο μη μόνιμο πρόβλημα έλικας, δακτυλίου και πλήμνης με κάποιες τροποποιήσεις, ως ακολούθως: Η ελέυθερη ακτινική στροβιλότητα πρέπει να κατανεμηθεί στην επιφάνεια του ομόρρου. Αυτή η στροβιλότητα έχει ξεκινήσει από το χείλος εκφυγής του πτερυγίου (και του δακτυλίου) σε προηγούμενα χρονικά βήματα και έτσι μπαίνει ως γνωστός ολοκληρωτικός όρος στο δεξί μέλος της ολοκληρωτικής εξίσωσης. Η συνθήκη Κutta πρέπει επίσης να τροποποιηθεί προκειμένου να περιέχει την παράγωγο του δυναμικού της ταχύτητας. Το πρόβλημα πρέπει τώρα να επιλυθεί στο πεδίο του χρόνου με εσωτερικές επαναλήψεις σε κάθε χρονικό βήμα
38
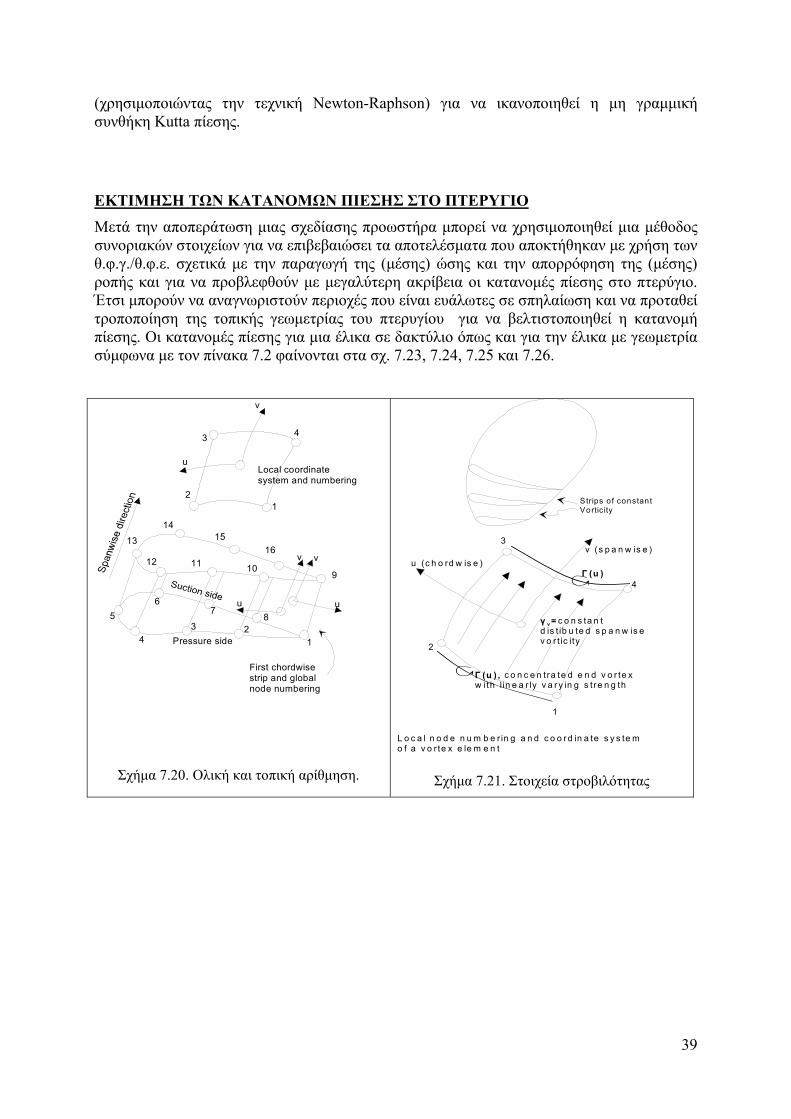
(χρησιμοποιώντας την τεχνική Newton-Raphson) για να ικανοποιηθεί η μη γραμμική συνθήκη Kutta πίεσης.
ΕΚΤΙΜΗΣΗ ΤΩΝ ΚΑΤΑΝΟΜΩΝ ΠΙΕΣΗΣ ΣΤΟ ΠΤΕΡΥΓΙΟ Μετά την αποπεράτωση μιας σχεδίασης προωστήρα μπορεί να χρησιμοποιηθεί μια μέθοδος συνοριακών στοιχείων για να επιβεβαιώσει τα αποτελέσματα που αποκτήθηκαν με χρήση των θ.φ.γ./θ.φ.ε. σχετικά με την παραγωγή της (μέσης) ώσης και την απορρόφηση της (μέσης) ροπής και για να προβλεφθούν με μεγαλύτερη ακρίβεια οι κατανομές πίεσης στο πτερύγιο. Έτσι μπορούν να αναγνωριστούν περιοχές που είναι ευάλωτες σε σπηλαίωση και να προταθεί τροποποίηση της τοπικής γεωμετρίας του πτερυγίου για να βελτιστοποιηθεί η κατανομή πίεσης. Οι κατανομές πίεσης για μια έλικα σε δακτύλιο όπως και για την έλικα με γεωμετρία σύμφωνα με τον πίνακα 7.2 φαίνονται στα σχ. 7.23, 7.24, 7.25 και 7.26.
123
4
56
78
9101112
13
1415
16vv
uu
Pressure side
u
12
3
v
4
First chordwise strip and globalnode numbering
Local coordinate system and numbering
Σχήμα 7.20. Ολική και τοπική αρίθμηση.
Strips o f constantVortic ity
1
2
3
4
u (c h o rd w is e )v (s p a n w is e )
Γ (u )
Γ (u ) , c o n c e n t ra te d e n d v o r te xw ith l in e a r ly v a r y in g s t re n g th
γ v = c o n s ta n td is t ib u te d s p a n w is ev o r t ic ity
L o c a l n o d e n u m b e r in g a n d c o o r d in a te s y s te mo f a v o r te x e le m e n t
Σχήμα 7.21. Στοιχεία στροβιλότητας
39
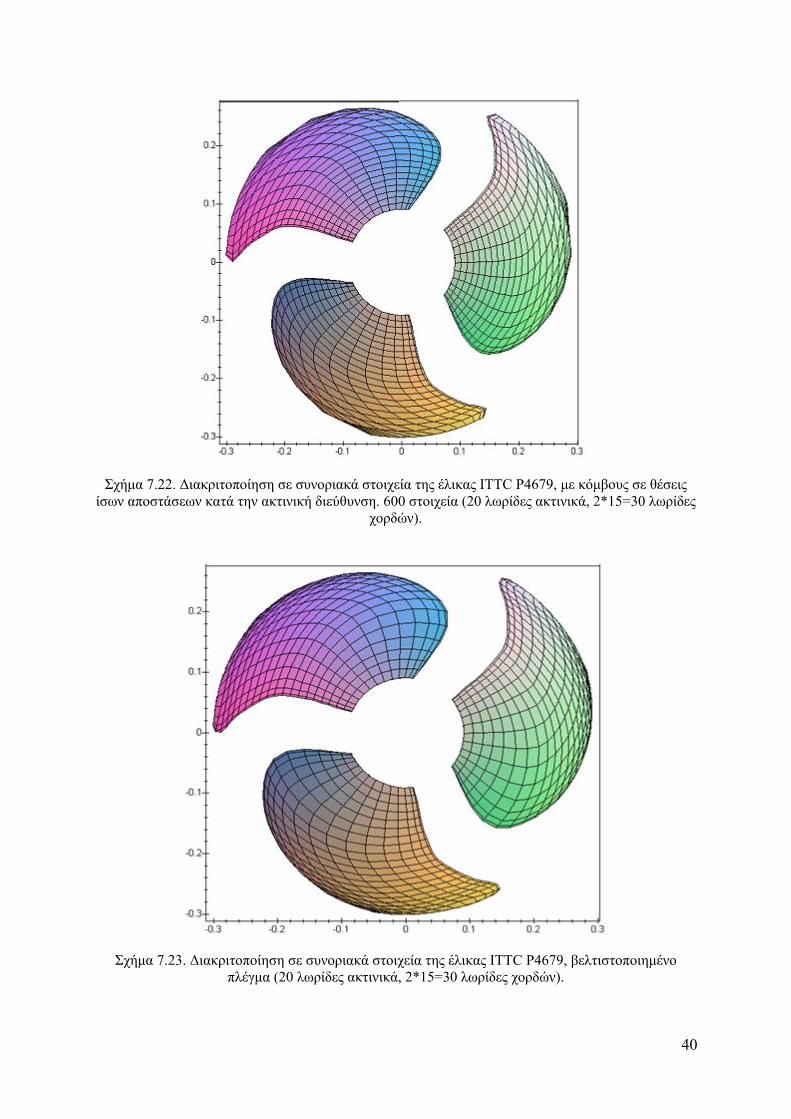
Σχήμα 7.22. Διακριτοποίηση σε συνοριακά στοιχεία της έλικας ITTC P4679, με κόμβους σε θέσεις
ίσων αποστάσεων κατά την ακτινική διεύθυνση. 600 στοιχεία (20 λωρίδες ακτινικά, 2*15=30 λωρίδες χορδών).
Σχήμα 7.23. Διακριτοποίηση σε συνοριακά στοιχεία της έλικας ITTC P4679, βελτιστοποιημένο
πλέγμα (20 λωρίδες ακτινικά, 2*15=30 λωρίδες χορδών).
40
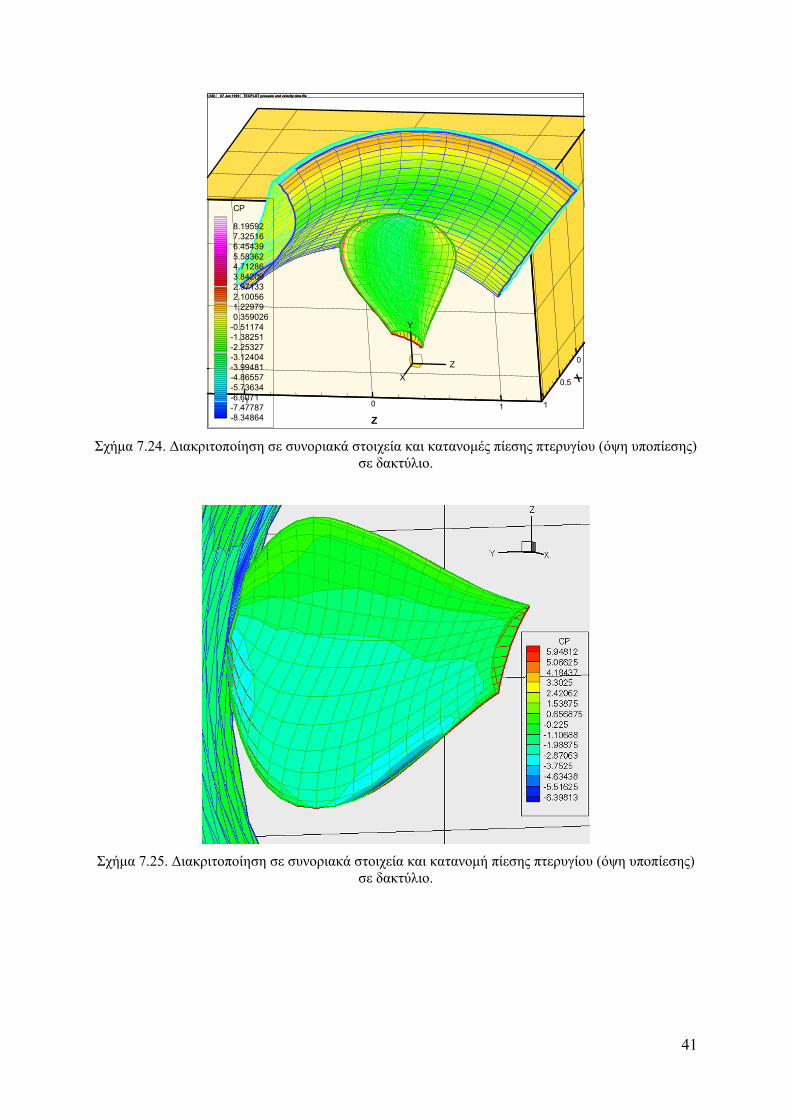
(3D) 07 Jan 1999 TECPLOT pressure and velocity data file
-1 0 1
Z
0
0.5
1
XX
Y
Z
CP
8.195927.325166.454395.583624.712863.842092.971332.100561.229790.359026
-0.51174-1.38251-2.25327-3.12404-3.99481-4.86557-5.73634-6.6071-7.47787-8.34864
(3D) 07 Jan 1999 TECPLOT pressure and velocity data file
Σχήμα 7.24. Διακριτοποίηση σε συνοριακά στοιχεία και κατανομές πίεσης πτερυγίου (όψη υποπίεσης)
σε δακτύλιο.
Σχήμα 7.25. Διακριτοποίηση σε συνοριακά στοιχεία και κατανομή πίεσης πτερυγίου (όψη υποπίεσης)
σε δακτύλιο.
41
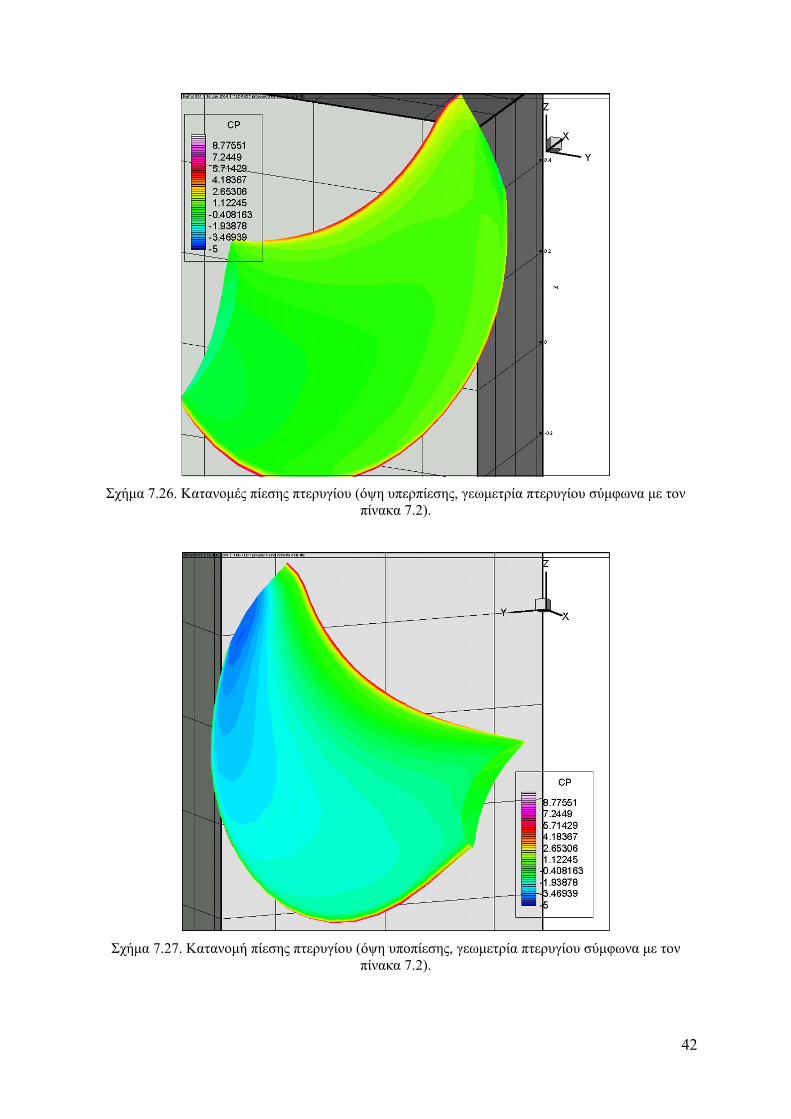
Σχήμα 7.26. Κατανομές πίεσης πτερυγίου (όψη υπερπίεσης, γεωμετρία πτερυγίου σύμφωνα με τον
πίνακα 7.2).
Σχήμα 7.27. Κατανομή πίεσης πτερυγίου (όψη υποπίεσης, γεωμετρία πτερυγίου σύμφωνα με τον
πίνακα 7.2).
42
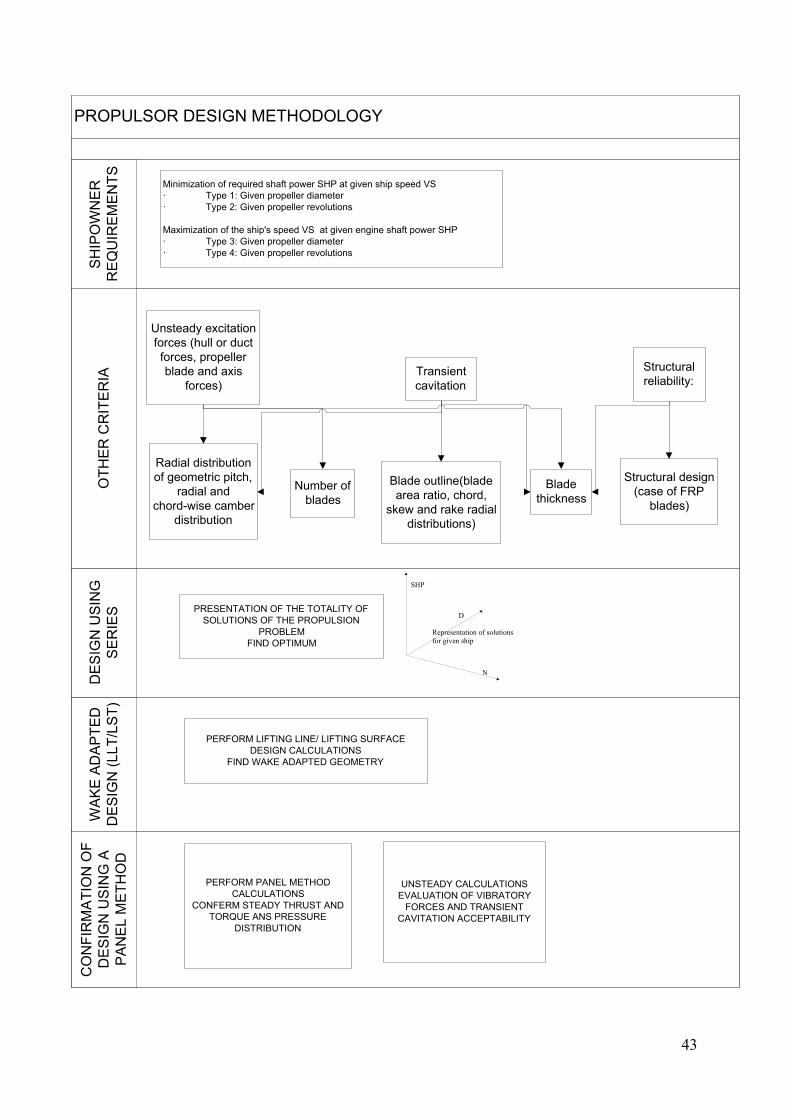
PROPULSOR DESIGN METHODOLOGY
CO
NFI
RM
ATI
ON
OF
DE
SIG
N U
SIN
G A
PA
NE
L M
ETH
OD
WA
KE
AD
AP
TED
DE
SIG
N (L
LT/L
ST)
DE
SIG
N U
SIN
GS
ER
IES
OTH
ER
CR
ITE
RIA
SH
IPO
WN
ER
RE
QU
IRE
ME
NTS
Unsteady excitationforces (hull or ductforces, propellerblade and axis
forces)
Number ofblades
Transientcavitation
Blade outline(bladearea ratio, chord,
skew and rake radialdistributions)
Bladethickness
Structuralreliability:
Structural design(case of FRP
blades)
Radial distributionof geometric pitch,
radial andchord-wise camber
distribution
Minimization of required shaft power SHP at given ship speed VS· Type 1: Given propeller diameter· Type 2: Given propeller revolutions
Maximization of the ship's speed VS at given engine shaft power SHP· Type 3: Given propeller diameter· Type 4: Given propeller revolutions
PRESENTATION OF THE TOTALITY OFSOLUTIONS OF THE PROPULSION
PROBLEMFIND OPTIMUM
SHP
D
N
Representation of solutionsfor given ship
PERFORM LIFTING LINE/ LIFTING SURFACEDESIGN CALCULATIONS
FIND WAKE ADAPTED GEOMETRY
PERFORM PANEL METHODCALCULATIONS
CONFERM STEADY THRUST ANDTORQUE ANS PRESSURE
DISTRIBUTION
UNSTEADY CALCULATIONSEVALUATION OF VIBRATORY
FORCES AND TRANSIENTCAVITATION ACCEPTABILITY
43
44
6 ΒΙΒΛΙΟΓΡΑΦΙΑ
1. Manen J. D. van, Oossanen P. van (1988), Propulsion, Principles of Naval Architecture, Volume II, SNAME.
1. Oosterveld, M.W.C, Osssanen, P. van (1975), Further Computer Analysed Data Of the Wagenigen B-screw series, ISP, Vol. 22.
2. Manen J. D. van, Oosterveld M.W.C. (1966), Analysis of Ducted Propeller design, Transactions SNAME.
3. Loukakis T.A., Gelegenis G.J. (1988), A new form of optimisation diagrams for preliminary Propeller Design, Transactions RINA.
4. Lerbs H. W. (1952), Moderately loaded propellers with a finite number of blades and an arbitrary distribution of circulation, Transactions SNAME.
5. Kerwin J.E., Coney W.B., Hsin C.Y. (1986), Optimum circulation distributions for single and multi-component propulsors, 21st ATTC.
6. Kerwin J.E. (1973), Computer Techniques in Propeller Blade Section Design, Second LIPS propeller Symposium, Drunen-Holland.
7. Kerwin, J., Lee, C.S. (1978), Prediction of steady and unsteady performance of marine propellers by numerical lifting surface theory, SNAME Transactions, Vol. 86.
8. Houghton & Brock (1970), Aerodynamics for Engineering Students, Edward Arnold Ltd, London.
9. Politis G.K. (1985), A lifting line equivalent profile method for propeller calculations, Journal of Ship Research, Vol. 29, No 4.
10. Hess J.L., Valarezo W.O. (1985), Calculation of steady flow about propellers by means of a surface panel method, AIAA 23rd Aerospace Science meeting, Reno, Nevada.
11. Politis G.K. (1998), PANPRO, a code for steady state velocity, pressure and force calculations around a marine propeller using a surface panel method, ITTC Workshop on Panel and RANS methods, Grenoble, France.
12. K.A. Belibasakis, G.K. Politis (1998), Application of a velocity based panel method to the analysis of marine propellers in unsteady flow, International Shipbuilding Progress, Vol 45, No 442.
13. Politis G.K., Kozhukharov P.G., Hadjimikhalev V. (1990), Application of Panel Methods in Linearized Lifting Surface Propeller Performance Problem, (Appendix D), Vth IMAEM congress.
1
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ
ΤΜΗΜΑ ΝΑΥΠΗΓΩΝ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ
ΜΑΘΗΜΑ: ΕΙΔΙΚΑ ΘΕΜΑΤΑ ΠΡΟΩΣΗΣ ΠΛΟΙΟΥ
ΣΥΓΧΡΟΝΑ ΣΥΣΤΗΜΑΤΑ ΠΡΟΩΣΗΣ ΠΕΡΙΕΧΟΜΕΝΑ: 1. Έλικα σταθερού βήματος (Fixed Pitch Propeller - FPP) 2. Έλικα μεταβλητού βήματος (Controlable Pitch Propeller - CPP) 3. Έλικες αντιθέτου περιστροφής (Contra Rotating Propellers – CRP) 4. Έλικα σε δακτύλιο (Propeller nozzle) 5. Overlapping propellers 6. Transverse thruster 7. Compass Thruster (Azimuth) 8. Azipod 9. SSP 10. Pump jets 11. Τροχός του Grim (Grim Wheel) 12. Έλικες κατακορύφου άξονα (κυκλοειδείς έλικες) 13. Συστήματα βελτίωσης του βαθμού απόδοσης
Γ. Κ. ΠΟΛΙΤΗ, Αναπληρωτή Καθηγητή
ΑΘΗΝΑ, ΜΑΙΟΣ 2004

2
ΤΥΠΟΙ ΠΡΟΩΣΗΣ ΣΥΝΤΟΜΗ ΠΕΡΙΓΡΑΦΗ - ΚΡΙΤΙΚΗ
Έλικα σταθερού βήματος (Fixed Pitch Propeller - FPP)
Απλός, οικονομικός, αξιόπιστος - δοκιμασμένος. Καλή απόδοση όταν έχει σχεδιαστεί σε συνδυασμό με την πρύμνη (wake adapted).
Έλικα μεταβλητού βήματος (Controlable Pitch Propeller - CPP)
Τύπος πρόωσης με σημαντικά μεγαλύτερο κόστος εγκατάστασης και λειτουργίας (συντήρηση εγκατάστασης) από τον προηγούμενο. Σε περίπτωση εργασίας σε πολλαπλά σημεία λειτουργίας μπορεί να είναι η μοναδική σχεδιαστική λύση. Δε συνίσταται για σταθερό σημείο λειτουργίας.
Έλικες αντιθέτου περιστροφής (Contra Rotating Propellers – CRP)
Μεγαλύτερο κόστος εγκατάστασης από την απλή έλικα και πιο πολύπλοκος μηχανισμός μετάδοσης κίνησης, αλλά μπορεί να δώσει πολύ υψηλότερο βαθμό απόδοσης για μεγάλες συγκεντρώσεις ισχύος όταν υπάρχει περιορισμός στη διάμετρο.
Έλικα σε δακτύλιο (Propeller nozzle)
Ο δακτύλιος αυξάνει την έλξη στις χαμηλές ταχύτητας αλλά (συνήθως) μειώνει τον βαθμό απόδοσης κοντά στην μέγιστη ταχύτητα του πλοίου. Αυτός ο τύπος πρόωσης είναι επομένως κατάλληλος για πλοία που χρειάζεται να αναπτύσσουν δύναμη ρυμούλκησης, όπως ρυμουλκά και αλιευτικά.
Overlapping propellers Σύστημα ελίκων που η μία λειτουργεί μερικώς στον ομόρρου της άλλης. Με κατάλληλη σχεδίαση αυτό το σύστημα πρόωσης έχει μεγαλύτερο βαθμό απόδοσης από την συνηθισμένη διάταξη διπλέλικου πλοίου. Η σχεδίαση του συστήματος απαιτεί σοβαρή πειραματική συνδρομή.
Transverse thruster Προωστηρας που τοποθετείτε εγκάρσια στην πρώρα και προσφέρει δυνατότητα στροφής του πλοίου εν στάση. Ιδιαίτερα χρήσιμο για ελιγμούς σε λιμάνι.
Compass Thruster (Azimuth) Επιλέγεται συνήθως γιατί δίνει καλές ελικτικές ικανότητες. Συνδυάζεται με έλικα σταθερού ή μεταβλητού βήματος ή με έλικες αντιθέτου περιστροφής.
Azipod Ανήκει στην ίδια κατηγορία με τον προηγούμενο τύπο πρόωσης αλλά κινείται ηλεκτρικά. Ο ηλεκτροκινητήρας είναι τοποθετημένος σε κατάλληλο κέλυφος κάτω από τη γάστρα.
SSP Ανήκει στην ίδια κατηγορία με τον τύπο azipod αλλά διαθέτει δύο έλικες αντί μία. Ο ηλεκτροκινητήρας είναι τοποθετημένος σε κατάλληλο κέλυφος κάτω από τη γάστρα.
Πρόωση με αντίδραση (Water Jet)
Ο τύπος αυτός αντλεί νερό μέσα από έναν αγωγό, ο οποίος είναι επιλεγμένος ανάλογα με το αν το ζητούμενο είναι η αύξηση της ταχύτητας ή η ελάττωση του θορύβου. Η αντλία μπορεί να είναι αξονική, όπως μια έλικα σε δακτύλιο, ή φυγοκεντρική, όπως μια συμβατική αντλία. Στις περισσότερες περιπτώσεις το ακροφύσιο εξόδου μπορεί να είναι κατευθυνόμενο προκειμένου να είναι δυνατοί οι ελιγμοί.
3
(Pump jets) Σύστημα που μπορεί να προσφέρει ώση με διεύθυνση που μεταβάλλεται κατά 3600. Χαμηλός βαθμός απόδοσης αλλά καλές ελικτικές ικανότητες. Χρήσιμο για λειτουργία πλοίου σε αβαθή νερά.
Τροχός του Grim (Grim Wheel) Μηχανικά περίπλοκος τύπος πρόωσης. Εκτός από μία έλικα υπάρχει και μία δεύτερη πτερωτή, η οποία οδηγείται από τα απόνερα της κύριας έλικας, και της οποίας το εσωτερικό τμήμα είναι υδροστρόβιλος και το εξωτερικό έλικα. Το εξωτερικό αυτό τμήμα προσθέτει στο σύστημα ώση και αυξάνει το βαθμό απόδοσης της έλικας μέχρι και 10-15%.
Έλικες κατακορύφου άξονα, κυκλοειδείς έλικες (Voith Schneider)
Κατακόρυφα τοποθετημένα πτερύγια που περιστρέφονται πάνω σε ένα δίσκο. Το κάθε πτερύγιο μπορεί επίσης να περιστρέφεται γύρω από τον άξονά του. Ρυθμίζοντας τη φάση μεταξύ των δύο αυτών περιστροφών μπορεί να αλλάζει η διεύθυνση της ώσης και έτσι το σύστημα αποτελεί έναν συνδυασμό προωστήρα – πηδαλίου.
Μαγνητο-Υδροδυναμική Πρόωση (Magneto-Hydrodynamic Propulsion)
Άμεση μετατροπή ηλεκτρικής ενέργειας σε ώση για το πλοίο. Έως τώρα έχουν καταγραφεί πολύ χαμηλοί βαθμοί απόδοσης.
Συστήματα βελτίωσης του βαθμού απόδοσης
Ποικιλία συστημάτων που χρησιμοποιούνται για βελτίωση της αποδοτικότητας της προωστήριας εγκατάστασης.
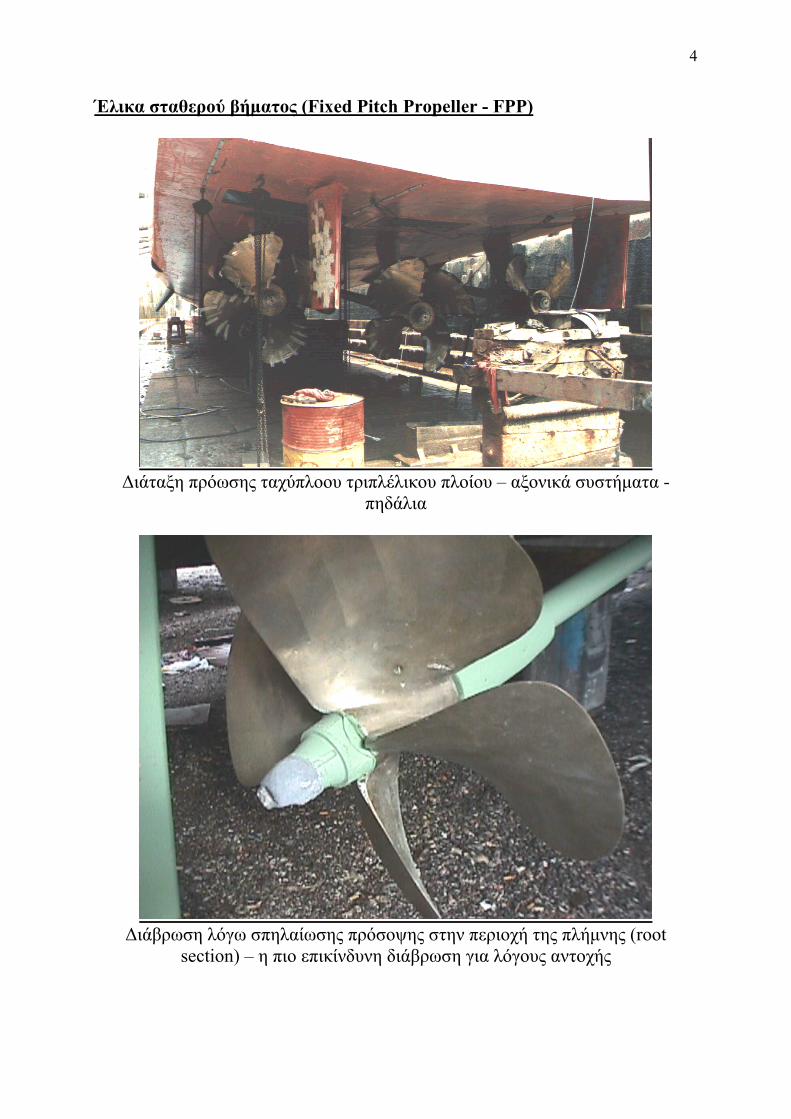
4
Έλικα σταθερού βήματος (Fixed Pitch Propeller - FPP)
Διάταξη πρόωσης ταχύπλοου τριπλέλικου πλοίου – αξονικά συστήματα -
πηδάλια
Διάβρωση λόγω σπηλαίωσης πρόσοψης στην περιοχή της πλήμνης (root
section) – η πιο επικίνδυνη διάβρωση για λόγους αντοχής
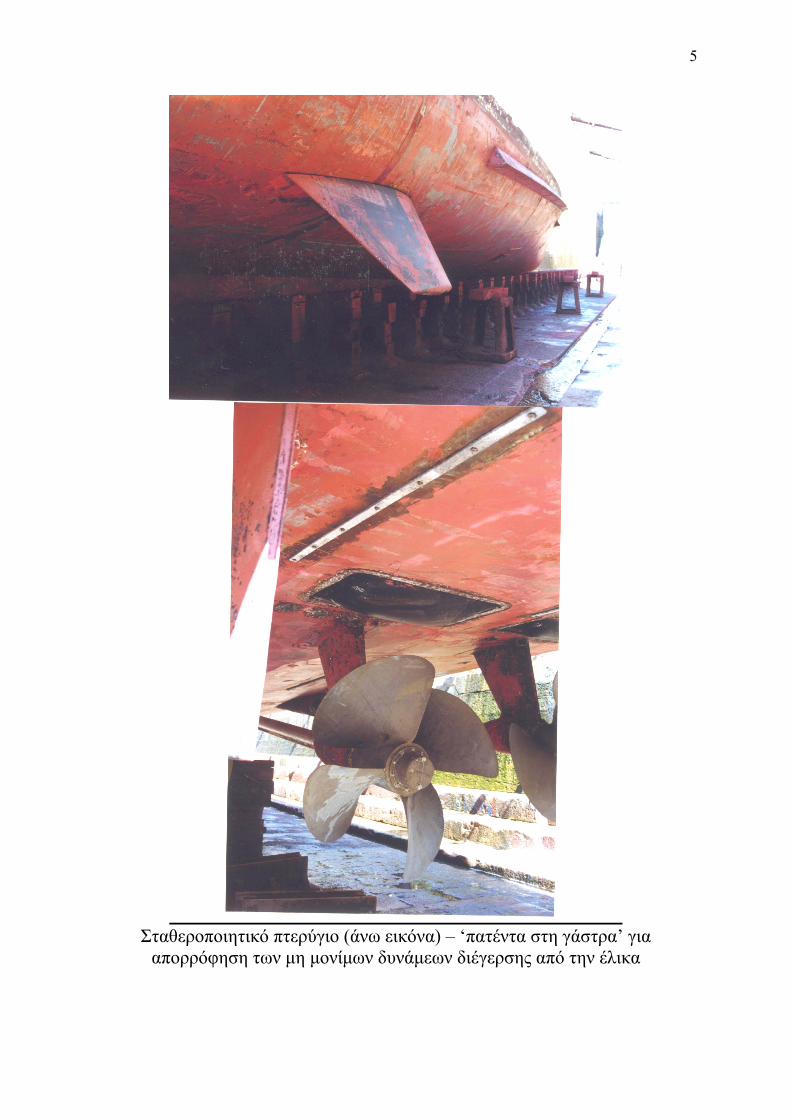
5
Σταθεροποιητικό πτερύγιο (άνω εικόνα) – ‘πατέντα στη γάστρα’ για απορρόφηση των μη μονίμων δυνάμεων διέγερσης από την έλικα
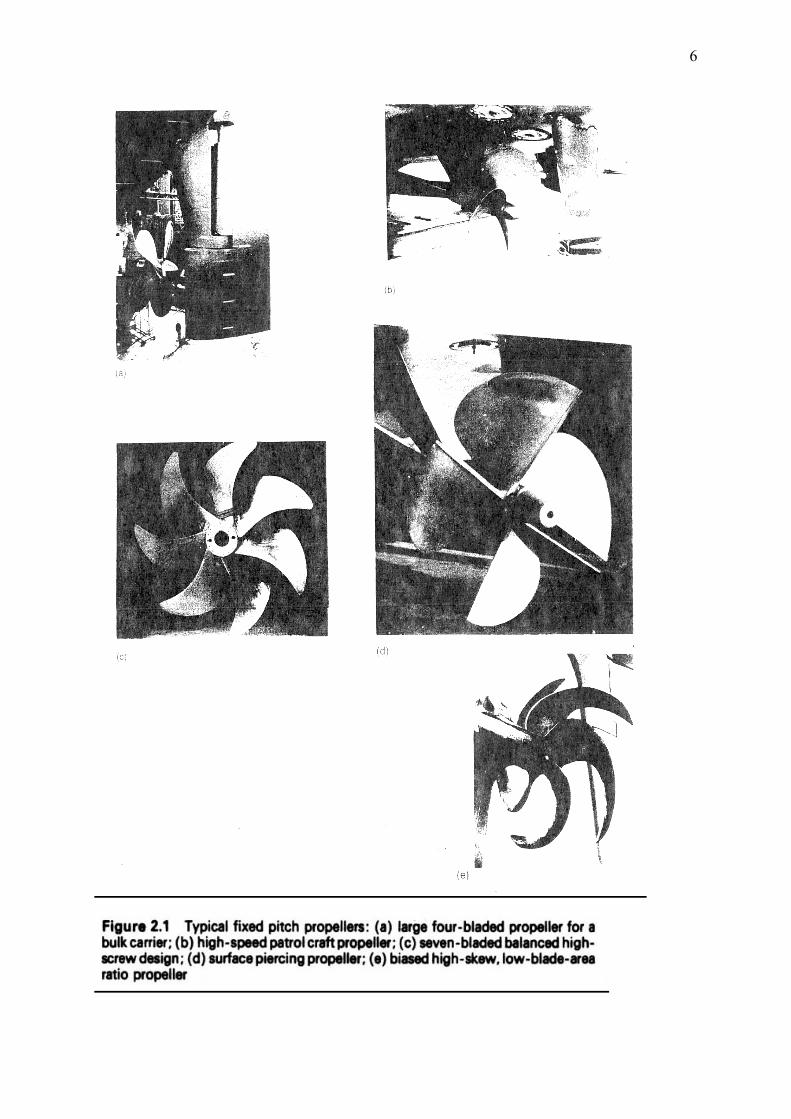
6
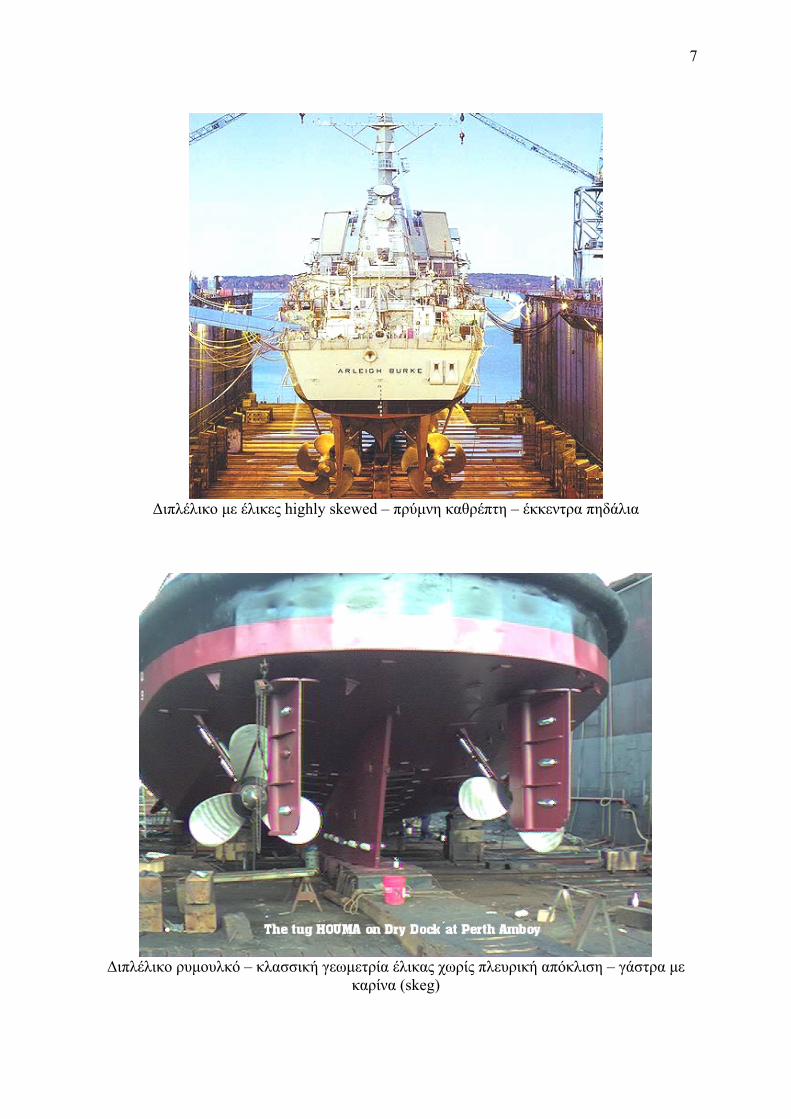
7
Διπλέλικο με έλικες highly skewed – πρύμνη καθρέπτη – έκκεντρα πηδάλια
Διπλέλικο ρυμουλκό – κλασσική γεωμετρία έλικας χωρίς πλευρική απόκλιση – γάστρα με
καρίνα (skeg)
8
Διάβρωση γάστρας και έλικας...
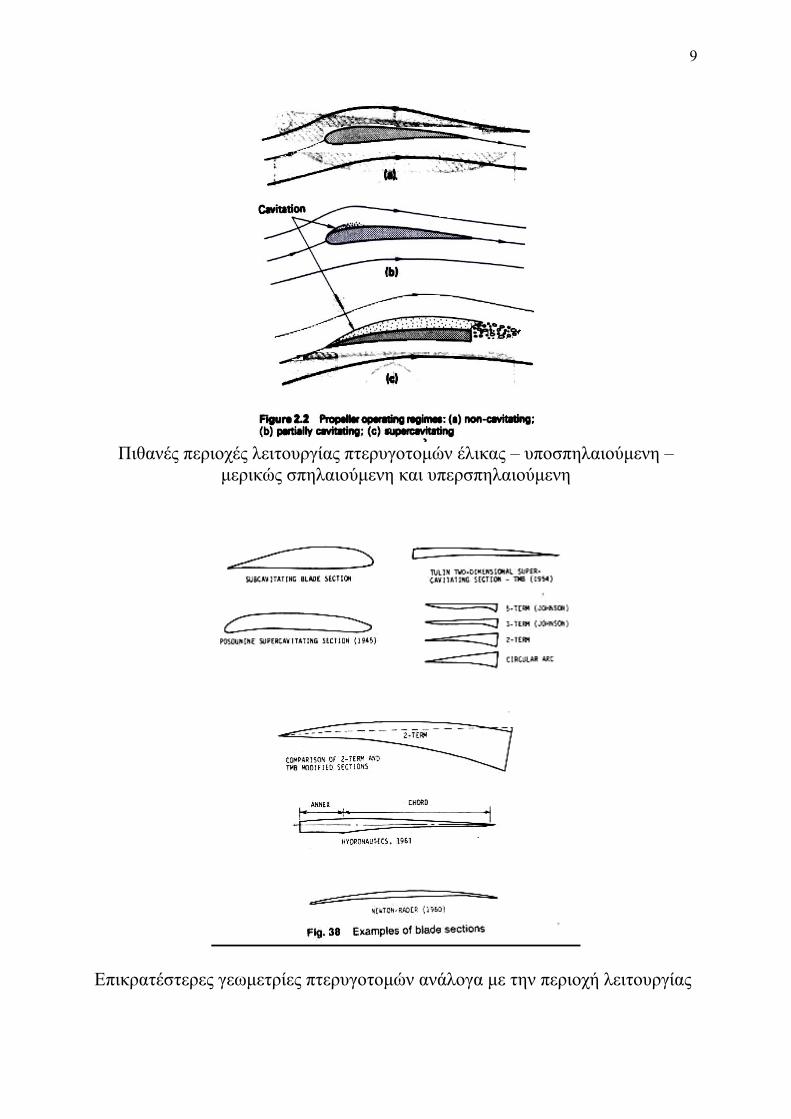
9
Πιθανές περιοχές λειτουργίας πτερυγοτομών έλικας – υποσπηλαιούμενη –
μερικώς σπηλαιούμενη και υπερσπηλαιούμενη
Επικρατέστερες γεωμετρίες πτερυγοτομών ανάλογα με την περιοχή λειτουργίας
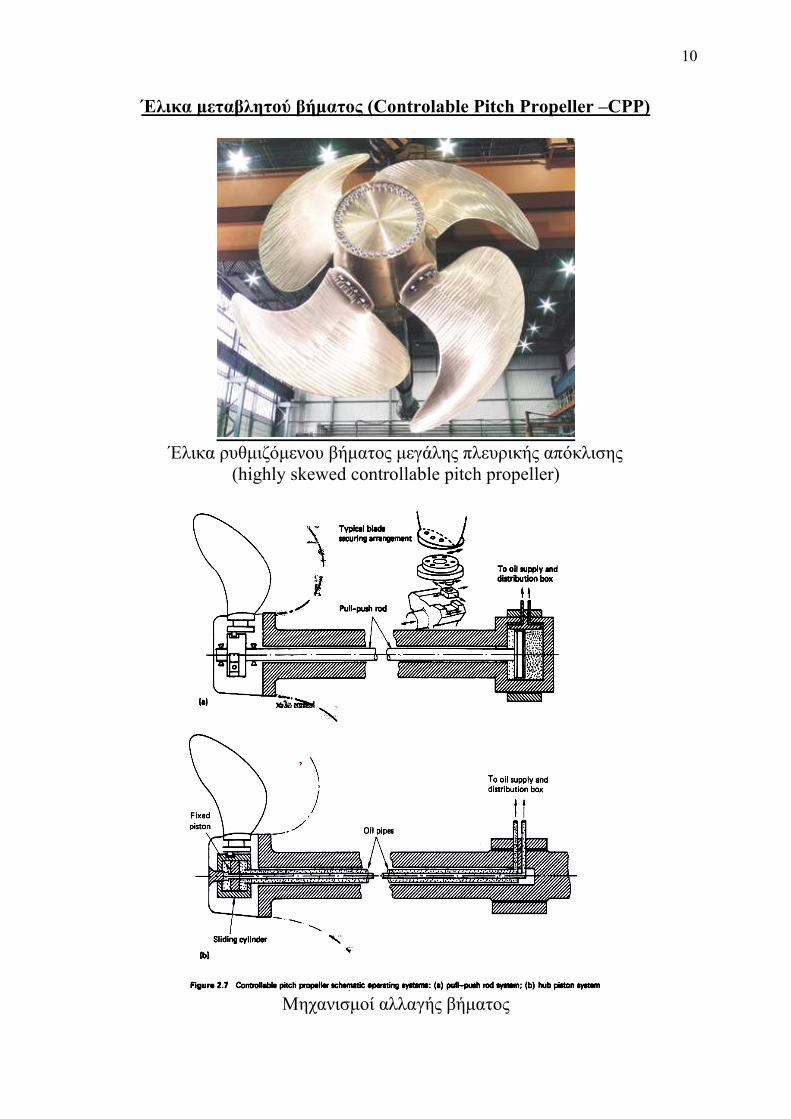
10
Έλικα μεταβλητού βήματος (Controlable Pitch Propeller –CPP)
Έλικα ρυθμιζόμενου βήματος μεγάλης πλευρικής απόκλισης
(highly skewed controllable pitch propeller)
Μηχανισμοί αλλαγής βήματος
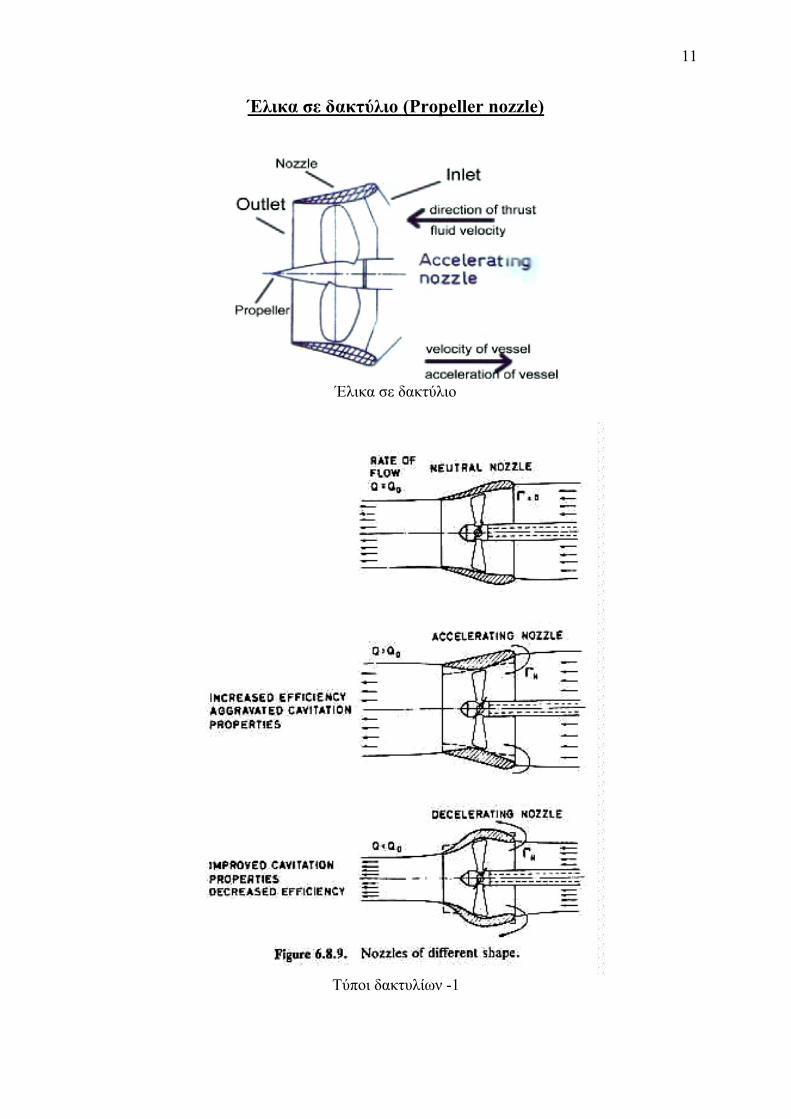
11
Έλικα σε δακτύλιο (Propeller nozzle)
Έλικα σε δακτύλιο
Τύποι δακτυλίων -1
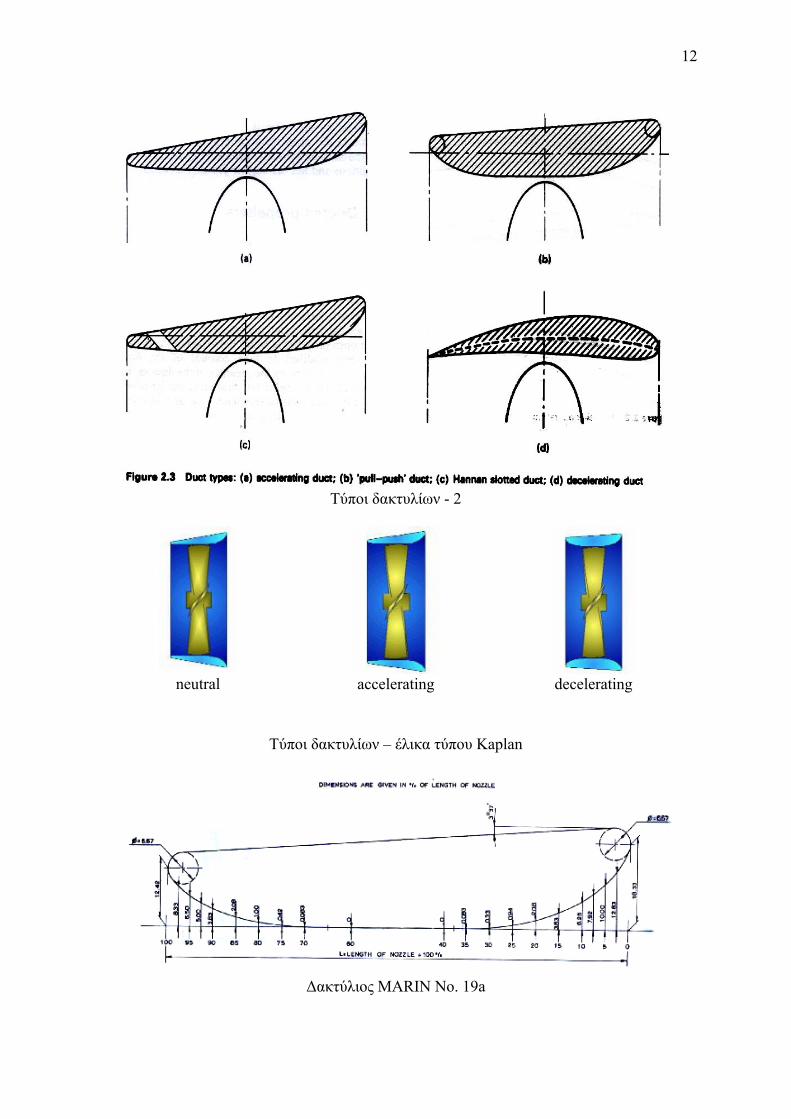
12
Τύποι δακτυλίων - 2
neutral
accelerating
decelerating
Τύποι δακτυλίων – έλικα τύπου Kaplan
Δακτύλιος MARIN No. 19a
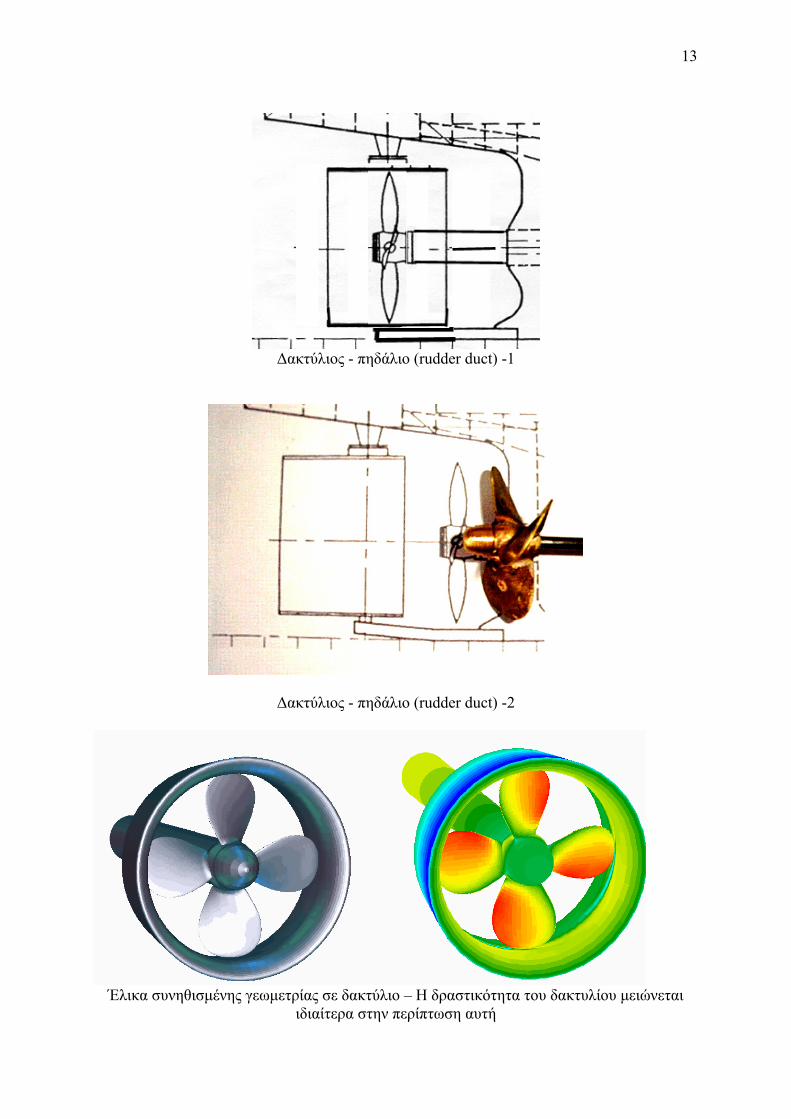
13
Δακτύλιος - πηδάλιο (rudder duct) -1
Δακτύλιος - πηδάλιο (rudder duct) -2
Έλικα συνηθισμένης γεωμετρίας σε δακτύλιο – Η δραστικότητα του δακτυλίου μειώνεται
ιδιαίτερα στην περίπτωση αυτή
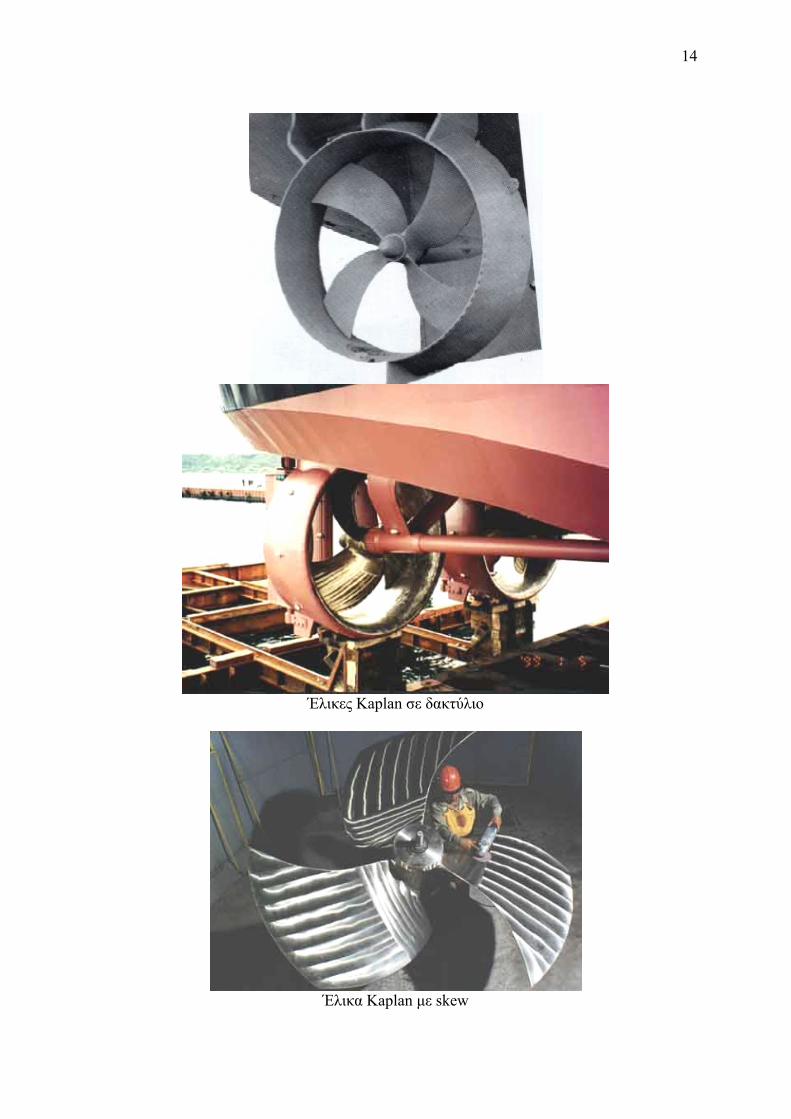
14
Έλικες Kaplan σε δακτύλιο
Έλικα Kaplan με skew
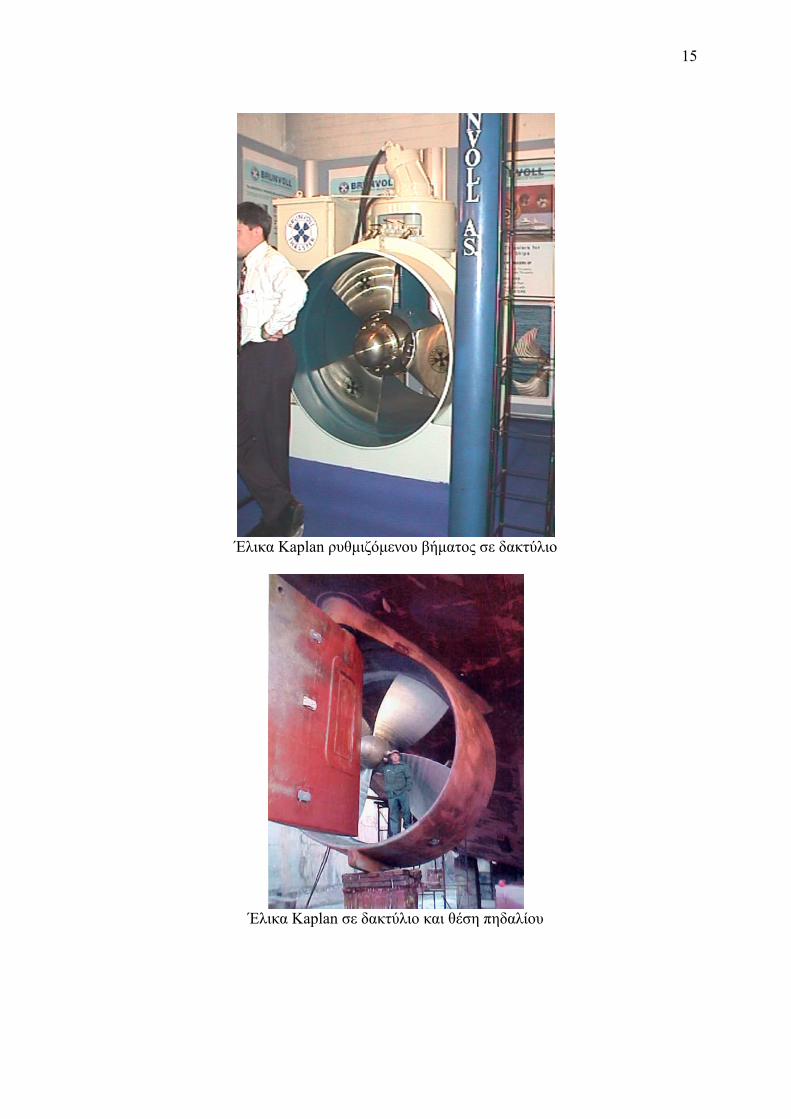
15
Έλικα Kaplan ρυθμιζόμενου βήματος σε δακτύλιο
Έλικα Kaplan σε δακτύλιο και θέση πηδαλίου

16
Έλικα συνηθισμένης γεωμετρίας σε δακτύλιο–πηδάλιο με οδηγητικό πτερύγιο
Έλικα συνηθισμένης γεωμετρίας σε σταθερό δακτύλιο – θέση πηδαλίου
Έλικα Kaplan σε δακτύλιο–πηδάλιο με οδηγητικό πτερύγιο
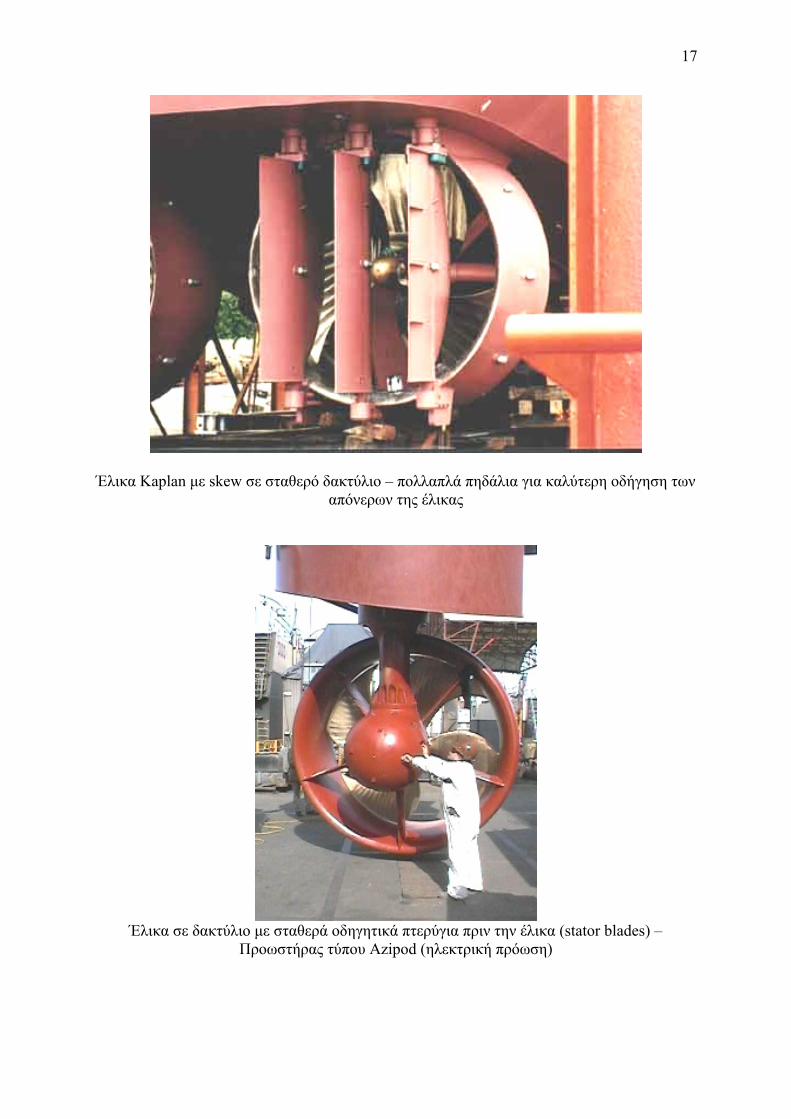
17
Έλικα Kaplan με skew σε σταθερό δακτύλιο – πολλαπλά πηδάλια για καλύτερη οδήγηση των απόνερων της έλικας
Έλικα σε δακτύλιο με σταθερά οδηγητικά πτερύγια πριν την έλικα (stator blades) –
Προωστήρας τύπου Azipod (ηλεκτρική πρόωση)
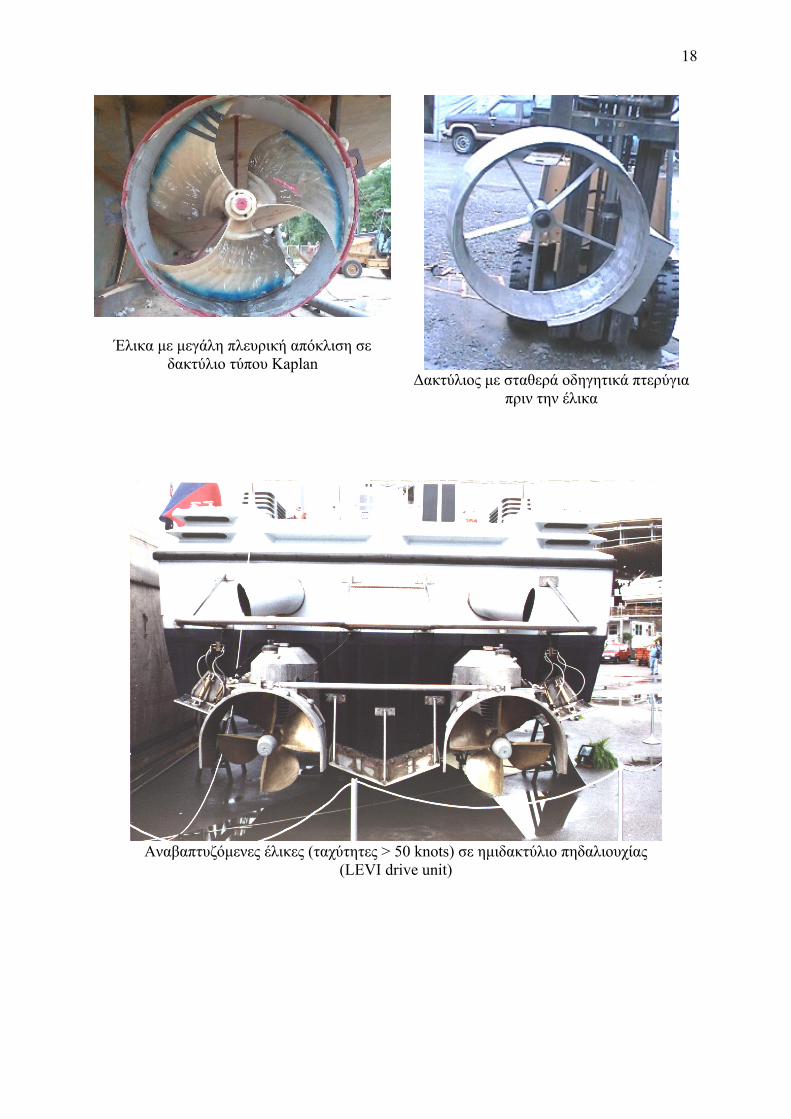
18
Έλικα με μεγάλη πλευρική απόκλιση σε
δακτύλιο τύπου Kaplan
Δακτύλιος με σταθερά οδηγητικά πτερύγια
πριν την έλικα
Αναβαπτυζόμενες έλικες (ταχύτητες > 50 knots) σε ημιδακτύλιο πηδαλιουχίας
(LEVI drive unit)
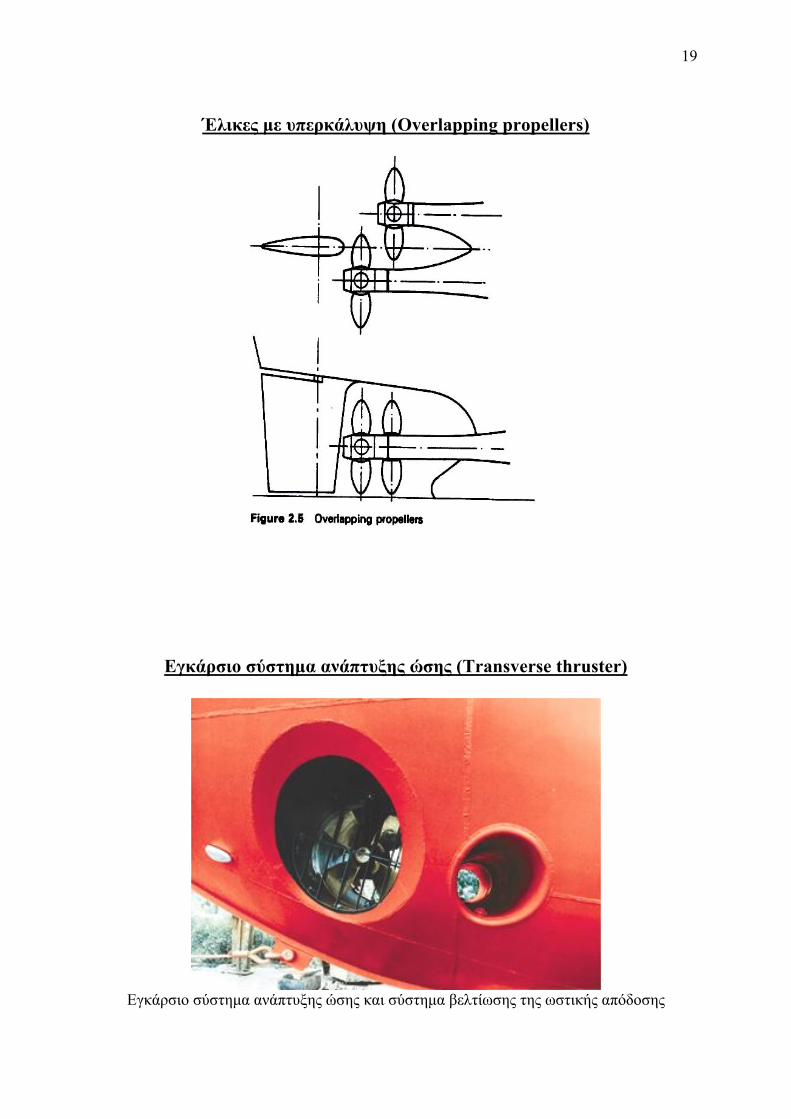
19
Έλικες με υπερκάλυψη (Overlapping propellers)
Εγκάρσιο σύστημα ανάπτυξης ώσης (Transverse thruster)
Εγκάρσιο σύστημα ανάπτυξης ώσης και σύστημα βελτίωσης της ωστικής απόδοσης
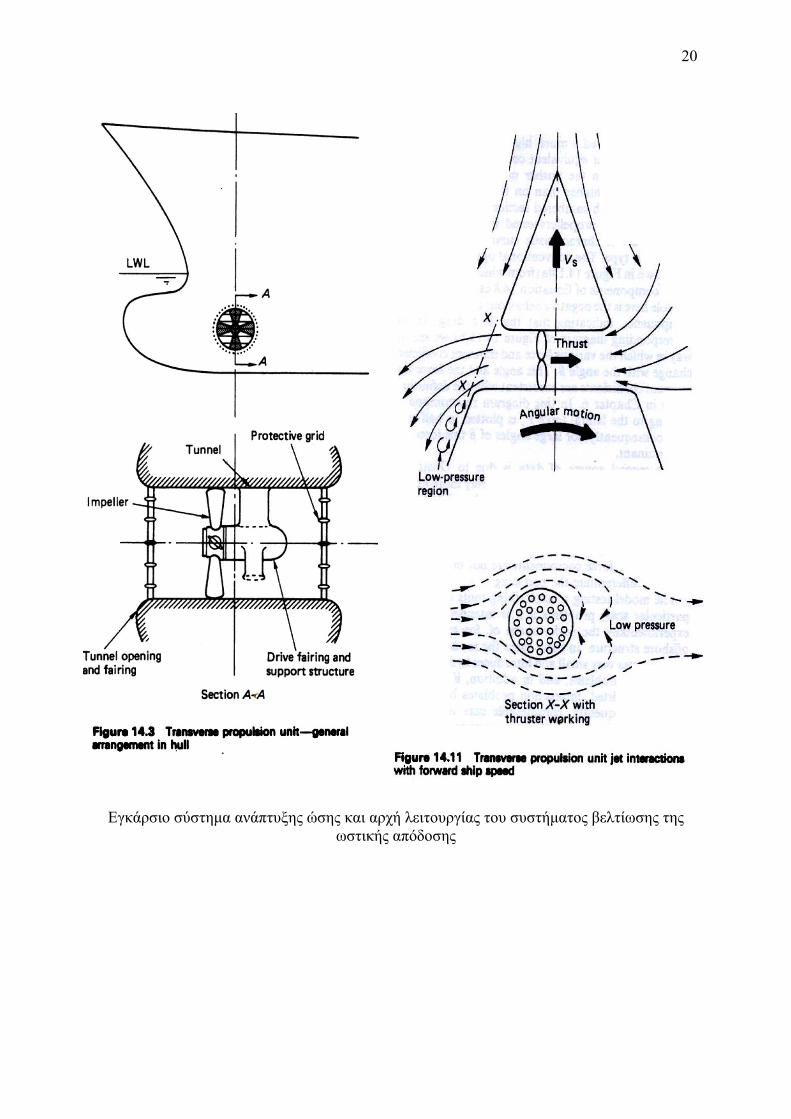
20
Εγκάρσιο σύστημα ανάπτυξης ώσης και αρχή λειτουργίας του συστήματος βελτίωσης της
ωστικής απόδοσης
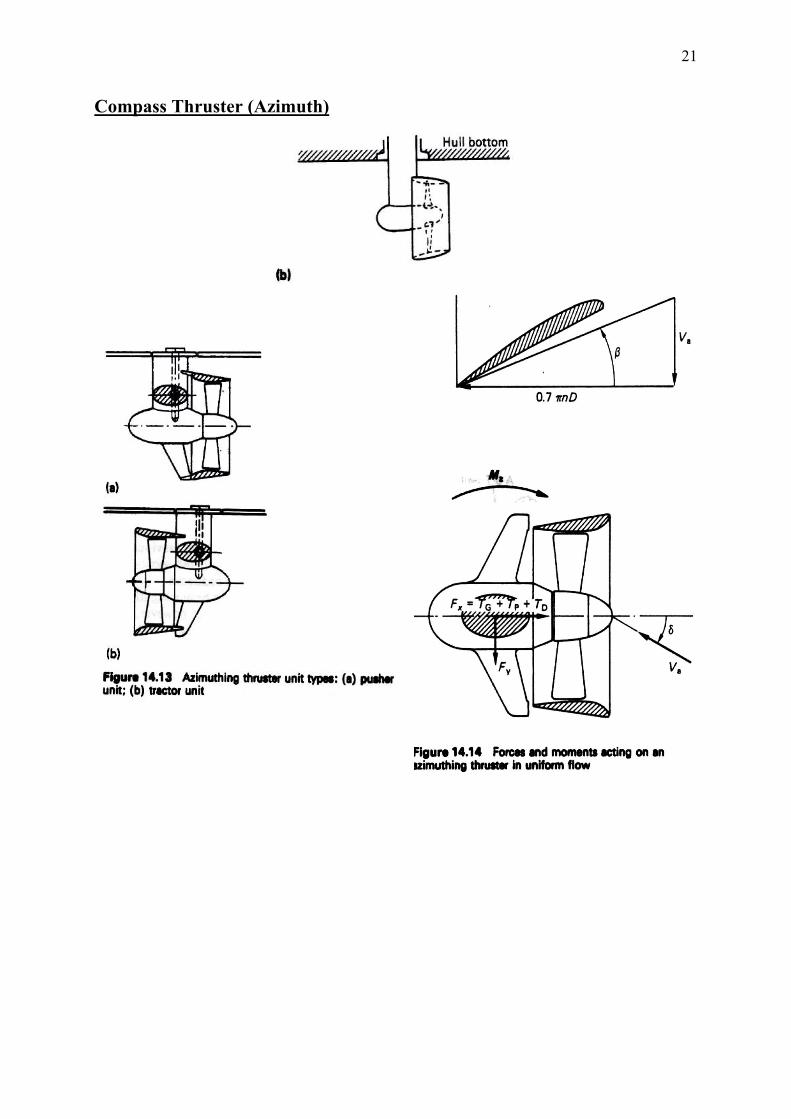
21
Compass Thruster (Azimuth)
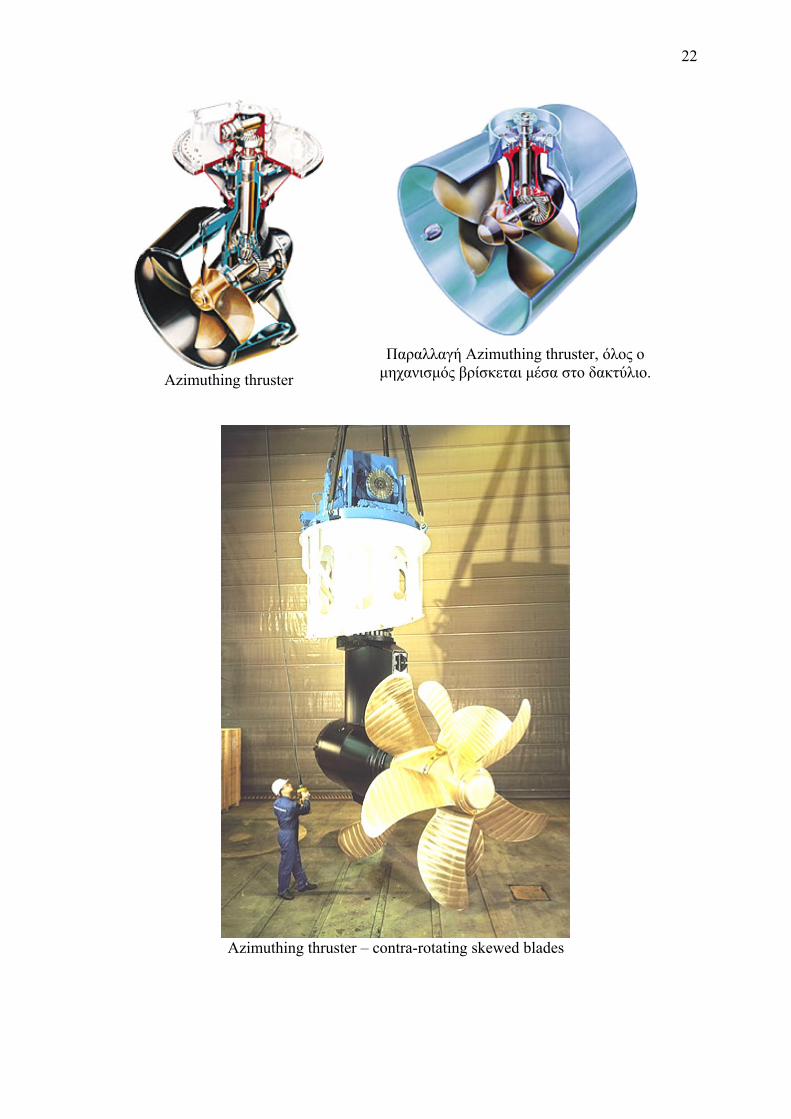
22
Azimuthing thruster
Παραλλαγή Azimuthing thruster, όλος ο μηχανισμός βρίσκεται μέσα στο δακτύλιο.
Azimuthing thruster – contra-rotating skewed blades
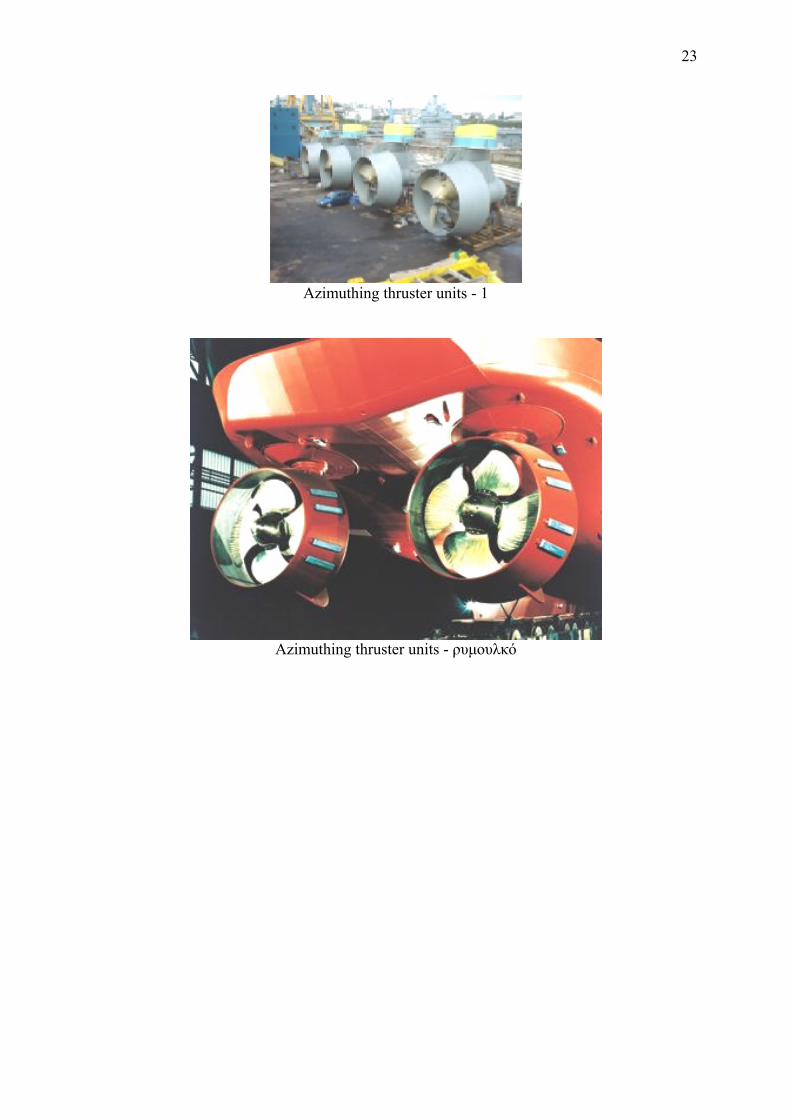
23
Azimuthing thruster units - 1
Azimuthing thruster units - ρυμουλκό
24
Azipod
Σύστημα ψύξης azipod
25
Μηχανολογική εγκατάσταση πλοίου προωθούμενου με το σύστημα ‘Azipod’ – Παρατηρήστε
το σύστημα γεννητριών με κινητήρες diesel και αεριοστρόβιλους.
26
27
SSP (Siemens -Schottel)
SSP με έλικες ρυθμιζόμενου βήματος
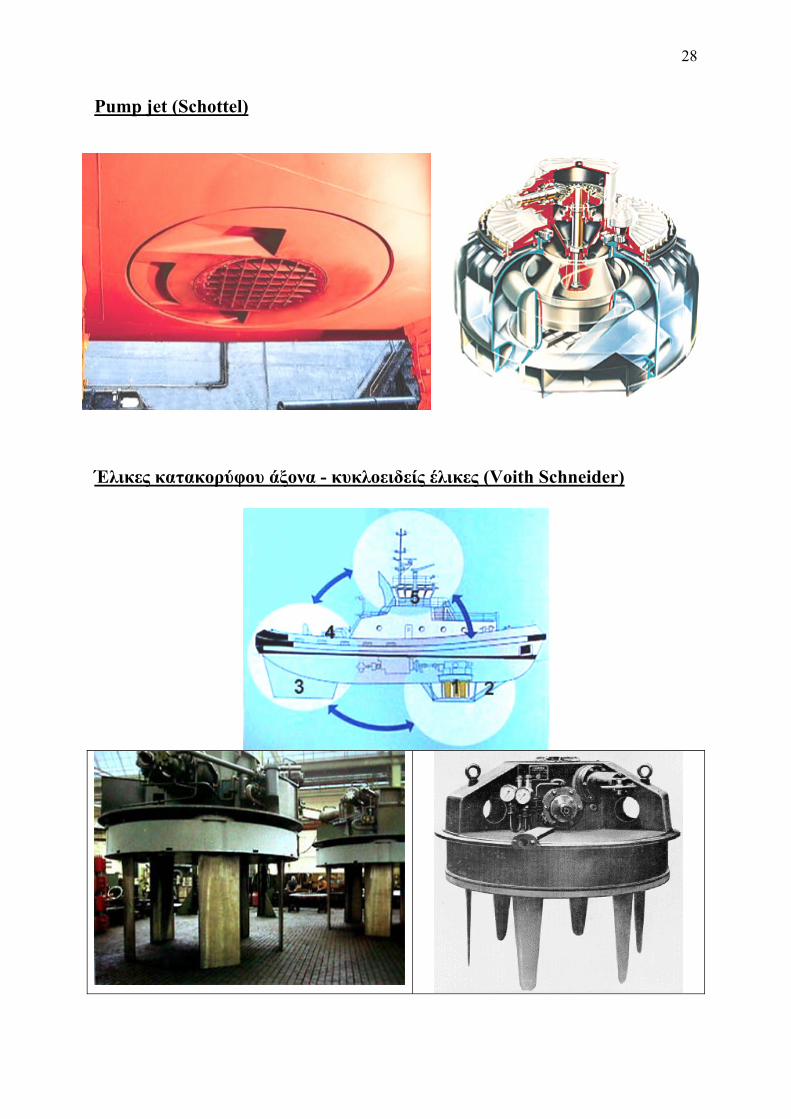
28
Pump jet (Schottel)
Έλικες κατακορύφου άξονα - κυκλοειδείς έλικες (Voith Schneider)
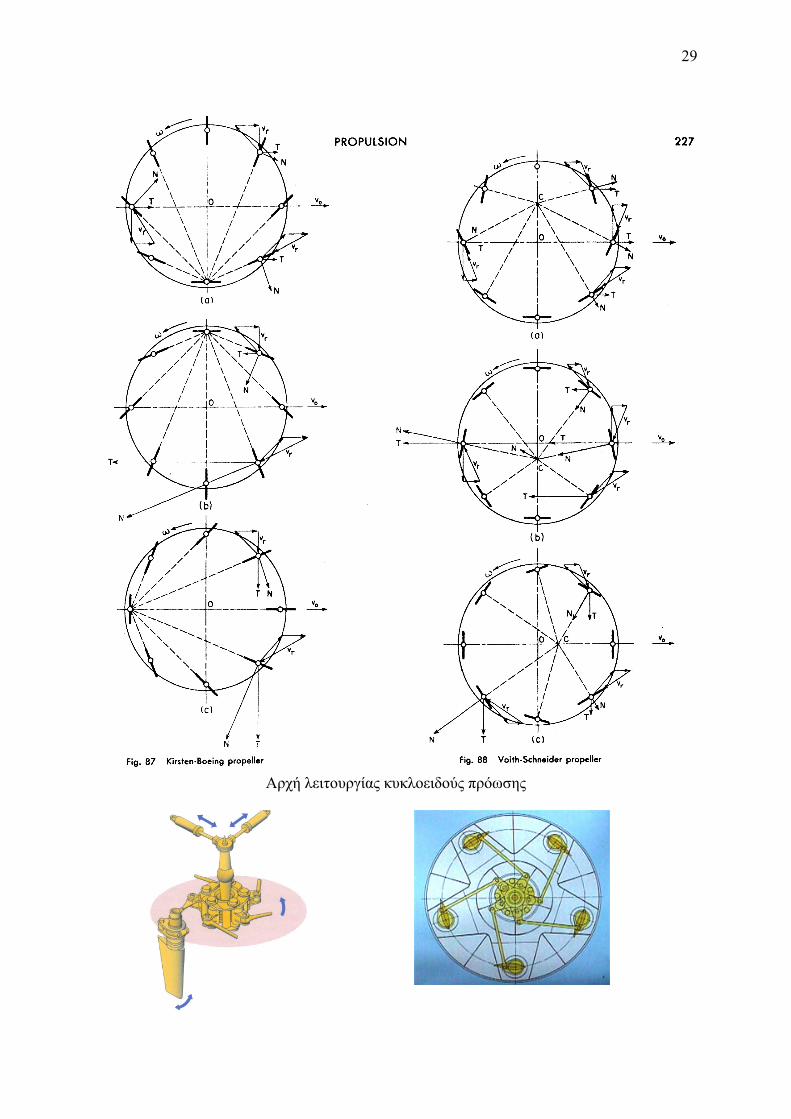
29
Αρχή λειτουργίας κυκλοειδούς πρόωσης
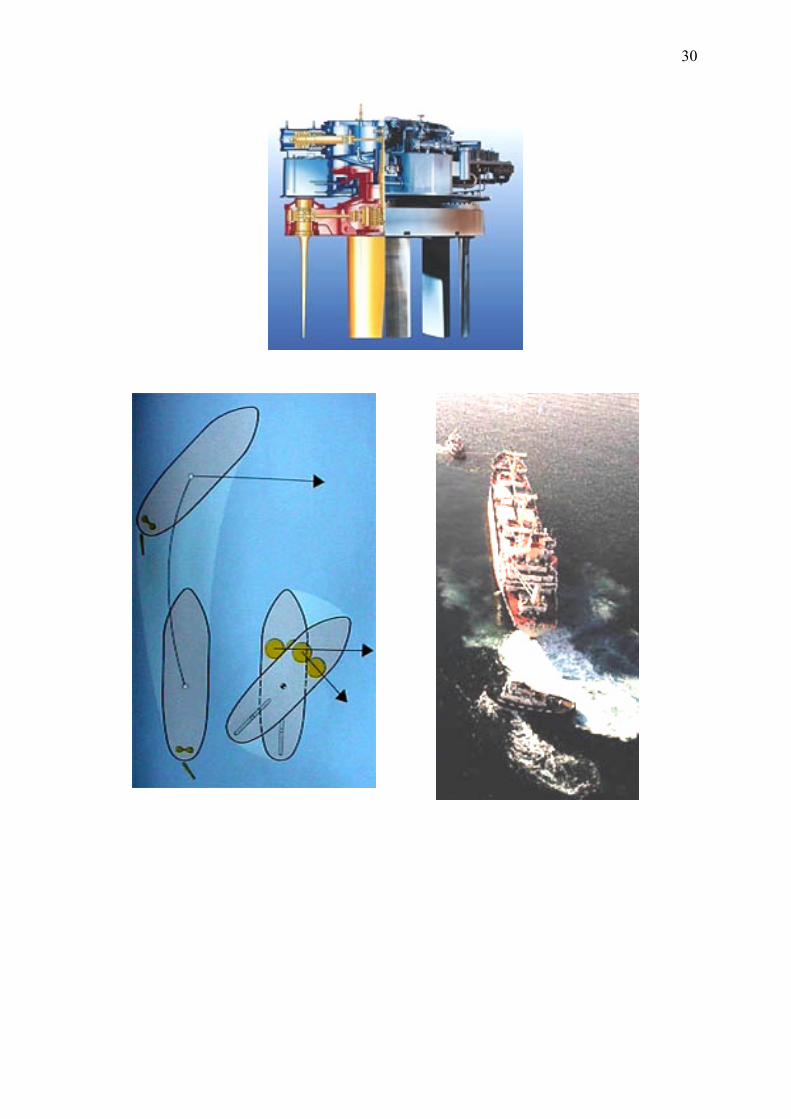
30
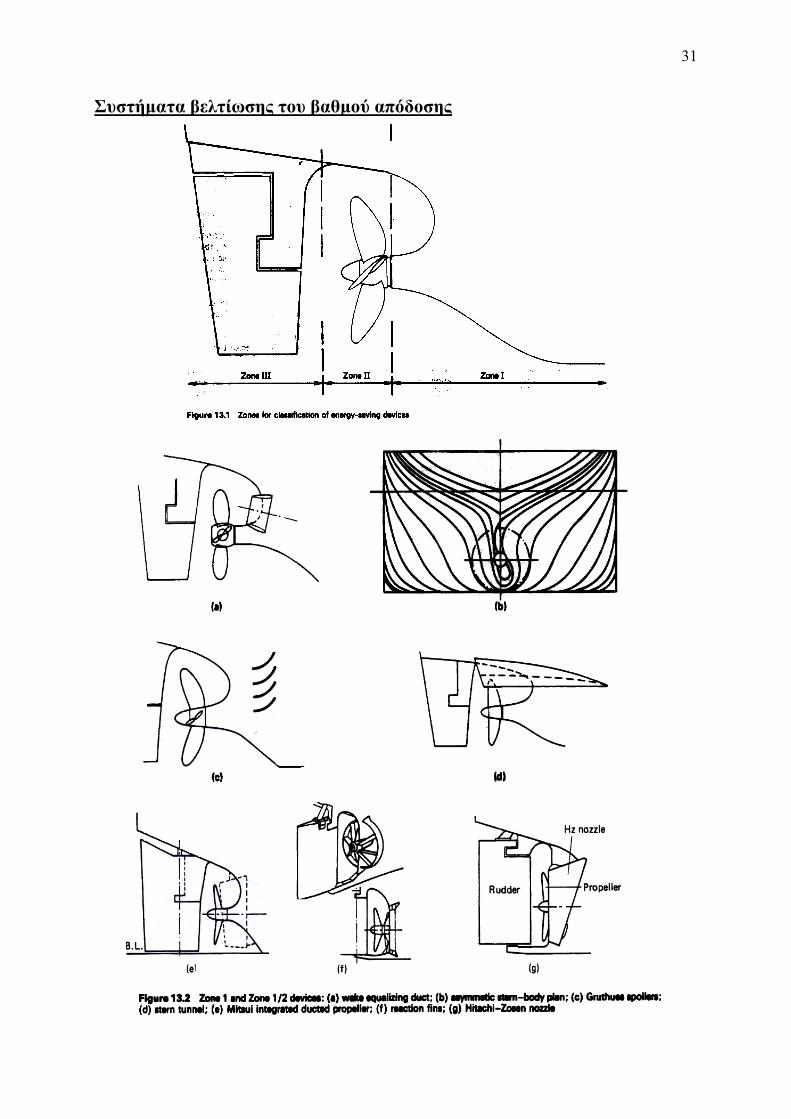
31
Συστήματα βελτίωσης του βαθμού απόδοσης
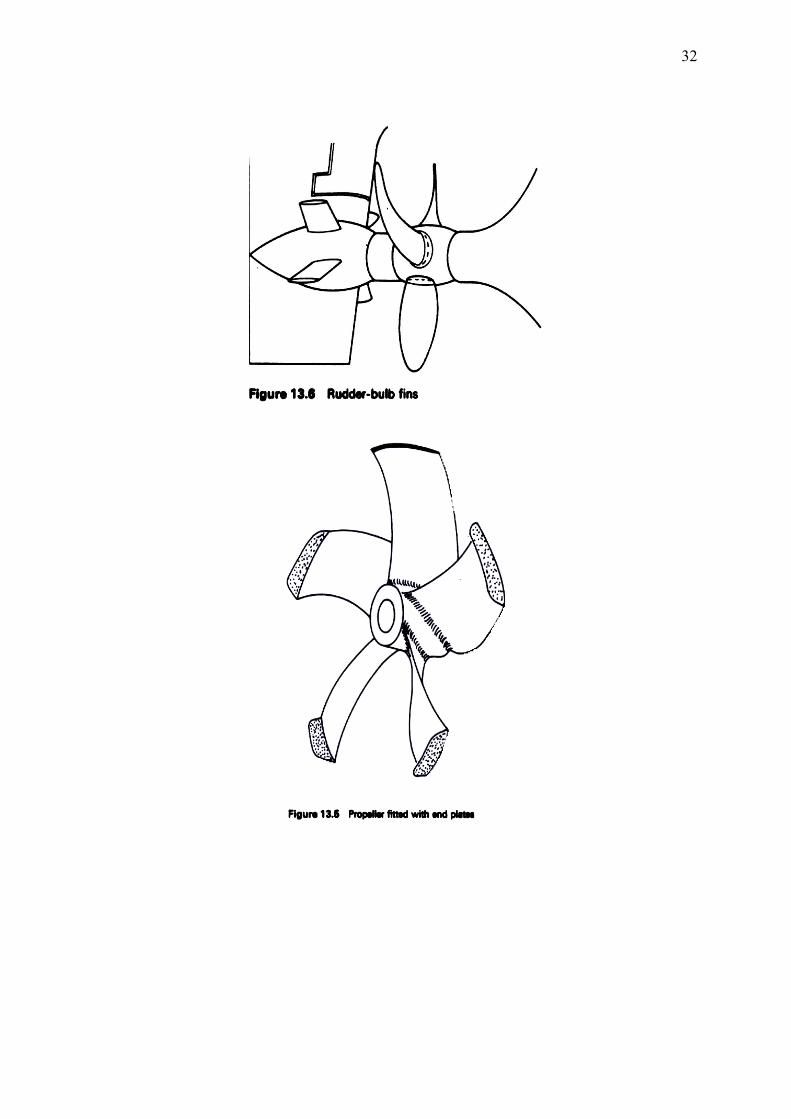
32
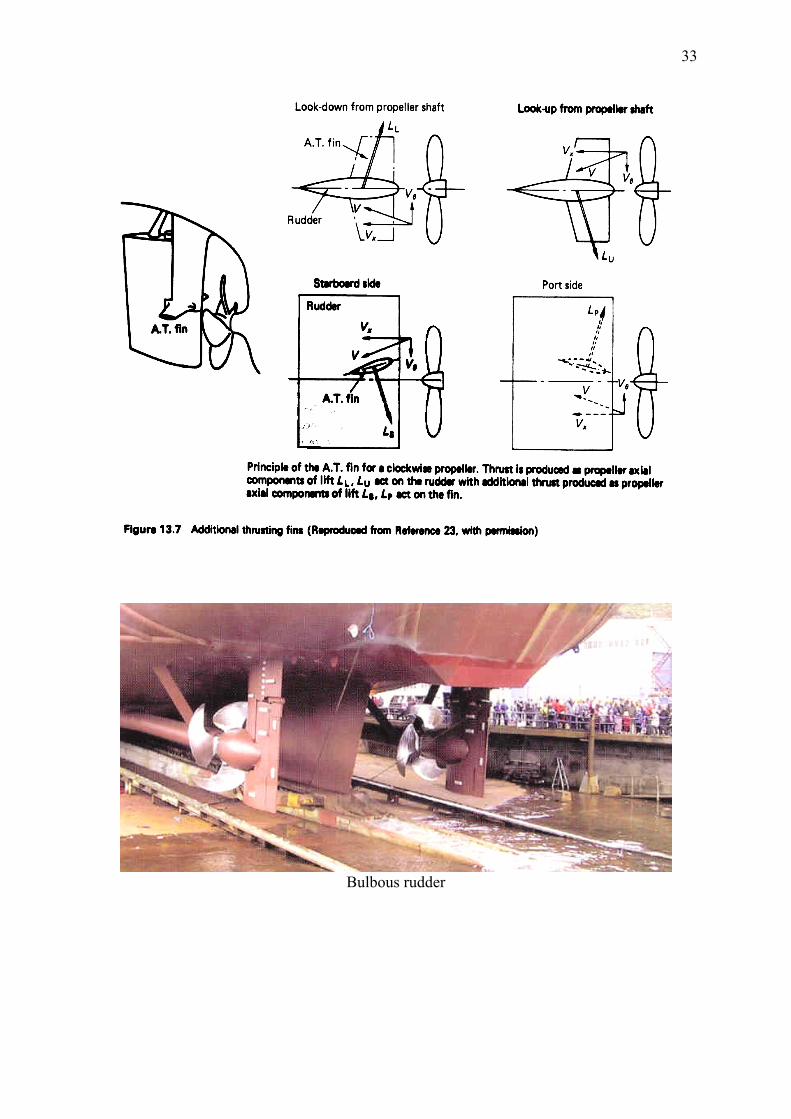
33
Bulbous rudder
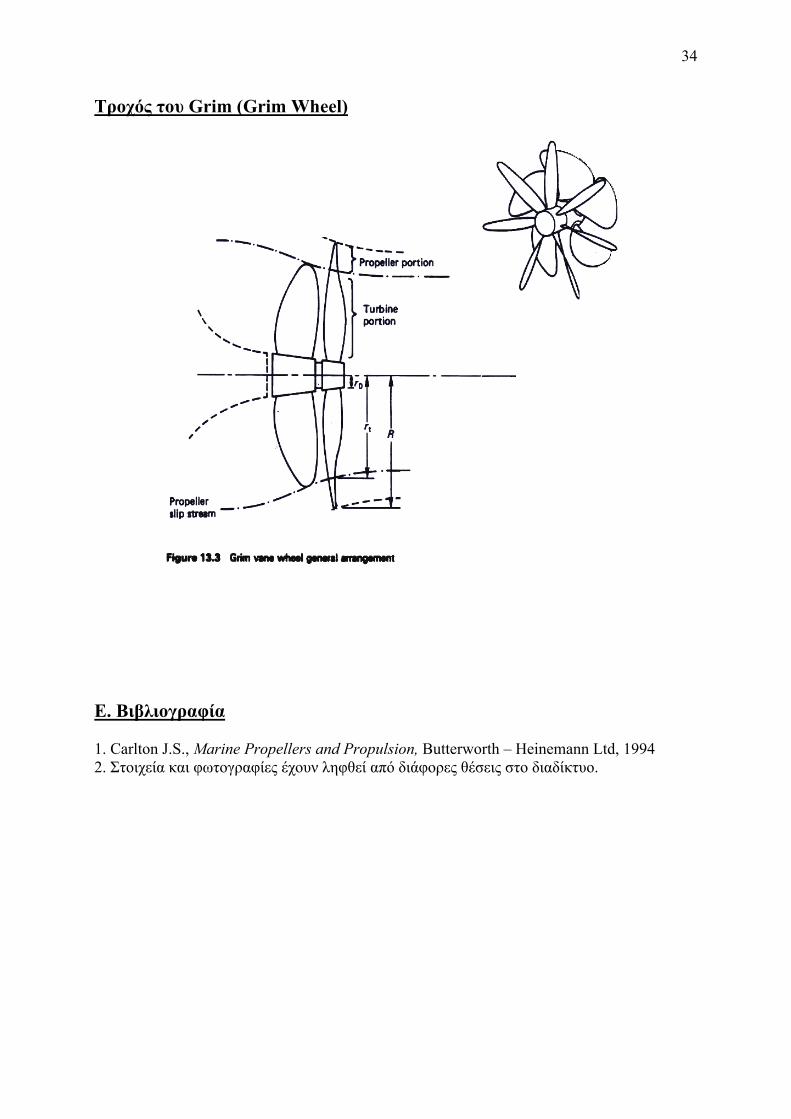
34
Τροχός του Grim (Grim Wheel)
Ε. Βιβλιογραφία 1. Carlton J.S., Marine Propellers and Propulsion, Butterworth – Heinemann Ltd, 1994 2. Στοιχεία και φωτογραφίες έχουν ληφθεί από διάφορες θέσεις στο διαδίκτυο.
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ
ΤΜΗΜΑ ΝΑΥΠΗΓΩΝ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ
ΜΑΘΗΜΑ: ΕΙΔΙΚΑ ΘΕΜΑΤΑ ΠΡΟΩΣΗΣ ΠΛΟΙΟΥ
ΣΥΓΧΡΟΝΑ ΜΗ ΣΥΜΒΑΤΙΚΑ ΣΥΣΤΗΜΑΤΑ ΠΡΟΩΣΗΣ ΚΑΙ ΕΞΟΙΚΟΝΟΜΗΣΗ ΕΝΕΡΓΕΙΑΣ
Γ. Κ. ΠΟΛΙΤΗ, Αναπληρωτή Καθηγητή
Ιούνιος 2004

1. Εισαγωγή
Περίπου ταυτόχρονα με την επικράτηση της έλικας σαν κυρίαρχου προωστηρίου μέσου στα πλοία, κατά το δεύτερο ήμισυ του 19ου αιώνα, άρχισαν να εμφανίζονται και οι πρώτες εφευρέσεις με στόχο τη βελτίωση του βαθμού απόδοσης της προωστήριας εγκατάστασης και την καλύτερη εκμετάλλευση της δαπανώμενης ενέργειας. Αποτέλεσμα των προσπαθειών αυτών ήταν η εμφάνιση πληθώρας 'συστημάτων πρόωσης' που 'βελτίωναν' το βαθμό απόδοσης της έλικας. Η σύγχρονη ιστορία μη συμβατικών συστημάτων πρόωσης που βελτιώνουν το βαθμό απόδοσης της προωστήριας εγκατάστασης και εξοικονομούν ενέργεια, αρχίζει με την πετρελαϊκή κρίση της δεκαετίας του 80. Στην παρούσα εργασία παρουσιάζεται η ιστορική πορεία της ανθρώπινης προσπάθειας για την παραγωγή συστημάτων βελτίωσης του βαθμού απόδοσης της προωστήριας εγκατάστασης πλοίων, από τις αρχές του αιώνα μέχρι σήμερα με έμφαση στην σύγχρονη ιστορία (μετά το 1970). Γίνεται επίσης μία κριτική παρουσίαση του φυσικού μηχανισμού στον όποιο βασίζονται τα μη συμβατικά αυτά συστήματα πρόωσης για να αυξήσουν το βαθμό απόδοσης καθώς και των 'παράπλευρων επιδράσεων' στη σχεδίαση του πλοίου από την επιλογή τους. Δίνονται επίσης στοιχεία από τη διεθνή βιβλιογραφία που αφορούν τις αναμενόμενες βελτιώσεις στο βαθμό απόδοσης από τη χρήση τέτοιων συστημάτων πρόωσης. Η εργασία τελειώνει με την παράθεση γενικών κατευθύνσεων κατά την επιλογή από το Ναυπηγό τέτοιων συστημάτων πρόωσης. 2. Ο συντελεστής πρόωσης
Τι σημαίνει βέλτιστο σύστημα πρόωσης; Για την απάντηση στο ερώτημα αυτό θα ξεκινήσουμε τη συζήτηση μας από το 'συντελεστή πρόωσης' που είναι και το υπό βελτιστοποίηση μέγεθος κατά τη μελέτη της προωστήριας εγκατάστασης.
Σύμφωνα με τη σύγχρονη ορολογία, που αφορά τη ροή ενέργειας στο αξονικό σύστημα του πλοίου, η απόδοση της προωστήριας εγκατάστασης εκφράζεται από το συντελεστή πρόωσης: P.C. (propulsive coefficient) που ορίζεται από την ακόλουθη σχέση /Πολίτης, 1993/:
(1) P C EHPSHP
EHPTHP
THPDHP
DHPSHPB
BH B S. .= = = η η η
όπου: EHP=R V: ισχύς ρυμούλκησης του πλοίου
( )tip
H
R
B Ar
THP V r dT= ∫ B
T
: ισχύς ώσης της έλικας
DHP=2πNQB: ισχύς αποδιδόμενη στην έλικα (μετά τη χοάνη) SHP=2πNQ: ισχύς στον άξονα της έλικας μετά το μειωτήρα R: αντίσταση ρυμούλκησης του πλοίου στην ταχύτητα (πλοίου)V dT: διαφορική ώση στην ακτίνα r και από τα Z πτερύγια
tip
H
R
B Br
T d= ∫ : ώση της έλικας, λειτουργία πίσω από το πλοίο
VΑ (r)=V (1-w(r)): ταχύτητα ομόρρου
2

w(r): ποσοστό ομόρρου N: στροφές της έλικας (rps) Q: ροπή στον άξονα μετά το μειωτήρα QΒ: ροπή στον άξονα στη θέση της έλικας (μετά τη χοάνη) ηH=EHP/THPB: βαθμός απόδοσης γάστρας ηB=THPB/DHP: βαθμός απόδοσης της έλικας πίσω από το πλοίο ηs =DHP/SHP: βαθμός απόδοσης άξονα Rtip: ακτίνα ακροπτερυγίου έλικας rH: ακτίνα πλήμνης έλικας Για λεπτόγραμμα πλοία ή για διπλέλικα πλοία, η ταχύτητα ομόρρου δε μεταβάλλεται σημαντικά συναρτήσει της ακτίνας: VA(r)=VA. Στην περίπτωση αυτή:
(2) =VA TB ( )tip
H
R
B Ar
THP V r dT= ∫ B
και ο βαθμός απόδοσης γάστρας παίρνει την ακόλουθη εξαιρετικά απλή μορφή:
(3) ηHA B
VRV T
tw
= =−−
11
όπου t το ποσοστό μείωσης ώσης, που ορίζεται από τη σχέση:
1 − =t RTB
Ο συντελεστής πρόωσης, όπως ορίζεται από τη σχέση (1), περικλείνει μία
ιστορική πρακτική την οποία έχει ενδιαφέρον να σχολιάσουμε. Ετσι η ισχύς ρυμούλκησης EHP δεν έχει νόημα για το αυτοπροωθούμενο πλοίο, όπου η λειτουργία της έλικας έχει τροποποιήσει την αντίσταση από R (ρυμούλκησης) σε RB (αντίσταση με την έλικα σε λειτουργία). Παρά τούτο η ισχύς ρυμούλκησης EHP χρησιμοποιείται σαν μία επιθυμητή ελάχιστη (αφού RB>R) ισχύς αναφοράς για τον ορισμό του συντελεστή πρόωσης. Η ισχύς ώσης της έλικας THPB δεν έχει επίσης νόημα για το αυτοπροωθούμενο πλοίο. Η αιτία της παρουσίας της, στον ορισμό του συντελεστή πρόωσης, σχετίζεται με τη 'συνήθεια' να προσπαθούμε να συσχετίσουμε το πρόβλημα της έλικας πίσω από το πλοίο με την έλικα σε 'ισοδύναμη ελεύθερη ροή'.
Ποια λοιπόν είναι τα μεγέθη πού έχουν πραγματική σημασία για το αυτοπροωθούμενο πλοίο; Η απάντηση είναι περίπου προφανής: (i) η ισχύς που δαπανάμε για την κίνηση του πλοίου, δηλαδή η SHP ή η DHP αν θεωρήσουμε την ισχύ που δίνουμε κατ' ευθείαν στην έλικα και (ii) η ωφέλιμη ισχύς, αυτή δηλαδή που τελικά εκμεταλλευόμαστε, που είναι η RBV=TBV, αφού RB=TB κατά την αυτοπρόωση του πλοίου.
Υπό το φως των τελευταίων παρατηρήσεων ένας διαφορετικός, πιο 'φυσικός', διαχωρισμός του συντελεστή πρόωσης είναι ο ακόλουθος:
(4) P C EHPSHP
EHPT V
T VDHP
DHPSHP
e eB
BH B S. .= = = η
3

Εξετάζοντας ένα-ένα τους όρους της σχέση (4) μπορεί να κάνουμε τις ακόλουθες παρατηρήσεις: (α) Ο όρος eH=EHP/(TBV)=1-t είναι πάντα μικρότερος της μονάδος. Δηλαδή η λειτουργία της έλικας πίσω από το πλοίο και η αλληλεπίδραση της με την περιοχή της πρύμνης δημιουργεί πρόσθετες απαιτήσεις ισχύος σε σχέση με την κατάσταση ρυμούλκησης. (β) Ο όρος ηs=DHP/SHP αφορά τις μηχανικές απώλειες στο αξονικό σύστημα και είναι πάντα μικρότερος της μονάδας. (γ) Ο όρος eB = (TBV)/DHP είναι ο 'φυσικός' βαθμός απόδοσης του προωστήριου μέσου του αυτοπροωθούμενου πλοίου. Πρακτικοί και ιστορικοί λόγοι όμως, επιβάλλουν τη διάσπαση του σε επί μέρους όρους:
(5) T V T VDHP THP
THPTHP
THPDHP
DHPDHP
B B
B
B= 0 0
A=
, όπου: 0 0
0 ( ) (tip
H
R
Ar
THP V r dT V T= ∫(6) για VA(r)=VA )
(7) DHP0 =2πNQ0 και T, Q0 η ώση και η ροπή της έλικας σε 'ισοδύναμη ελεύθερη ροή'. Αν η 'ισοδύναμη ελεύθερη ροή' καθοριστεί από τη μέθοδο εξίσωσης ώσης δηλαδή την υπόθεση 'ίσης ώσης' μεταξύ των δύο καταστάσεων 'πίσω από το πλοίο' και 'σε ελεύθερη ροή' τότε TB=T, οπότε: (8) THPB =THP0 και
(9) ηRB
DHPDHP
= =0 0 (ηR ο βαθμός απόδοσης σχετικής περιστροφής)
Χρησιμοποιώντας τις σχέσεις (8) και (9) η σχέση (5) παίρνει τη μορφή:
(10) e T VDHP
T VTHPB
B B
BR= = η η0
όπου: (11) η0 =THP0/DHP0 o βαθμός απόδοσης της έλικας στην 'ισοδύναμη ελεύθερη ροή' (δ) Δεδομένου ότι οι επιμέρους λόγοι στους οποίους διασπάται ο 'φυσικός' βαθμός απόδοσης eB , όπως ορίστηκε στο (γ), είναι μη φυσικής αιτίασης, οι λόγοι αυτοί δεν είναι απαραίτητα μικρότεροι της μονάδας όπως θα περίμενε κάποιος για 'βαθμούς απόδοσης'. Ετσι ο λόγος TBV/THPB , ο οποίος για VA(r)=VA είναι ίσος με 1/(1-w), είναι μεγαλύτερος της μονάδας, ενώ ο βαθμός απόδοσης σχετικής περιστροφής ηR είναι συνήθως λίγο μεγαλύτερος της μονάδας, χωρίς σ' αυτό να μπορεί να αποδοθεί κάποια παραδοξότητα. Ο λόγος η0=THP0/DHP0 είναι μικρότερος της μονάδας και όπως ειπώθηκε προηγουμένως είναι παρελκόμενο της προσπάθειας συσχετισμού του προβλήματος της έλικας πίσω από το πλοίο (αυτοπροωθούμενο πλοίο) με την έλικα σε 'ισοδύναμη ελεύθερη ροή'.
4
3. Αναζητώντας 'καλύτερα' συστήματα πρόωσης
Η τιμή του συντελεστή πρόωσης σε μία σύγχρονη καλοσχεδιασμένη προωστήρια εγκατάσταση κυμαίνεται στην περιοχή: P.C.=60 με 75%, έχομε δηλαδή ένα ποσοστό απωλειών της τάξης του 25 με 40%.
Ενας προβληματισμός για την επινόηση συστημάτων πρόωσης που βελτιώνουν το συντελεστή πρόωσης απαιτεί την απάντηση σε δύο ερωτήματα: (α) Ποιοι είναι οι φυσικοί μηχανισμοί των απωλειών; (β) Πώς κατανέμονται ποσοτικά οι απώλειες στους διάφορους φυσικούς μηχανισμούς; Για την απάντηση στο πρώτο ερώτημα παρατηρούμε ότι οι απώλειες κατά τη λειτουργία της προωστήριας εγκατάστασης μπορεί να χωριστούν σε τέσσερις ομάδες: Α. Απώλειες σε οργανωμένη μορφή κίνησης του ρευστού και σε κλίμακα αντίστοιχη με το μέγεθος της έλικας. Τέτοιες είναι η αξονική και η γωνιακή ορμή (swirl) στον ομόρρου της έλικας. Β. Απώλειες σε ανοργάνωτη μορφή κίνησης του ρευστού, οι οποίες καταλήγουν σε θερμότητα. Τέτοιες είναι: (i) η απώλεια συνεκτικής αντίστασης τριβής στα πτερύγια της έλικας (viscous drag) (ii) η απώλεια αντίστασης πίεσης λόγω συνεκτικότητας (viscous pressure drag) που εμφανίζεται τοπικά όταν το πτερύγιο της έλικας περνά από το υψηλότερο σημείο όπου η σημαντική μείωση της ταχύτητας ομόρρου V(r) μπορεί να οδηγήσει σε αποκόλληση. Γ. Απώλειες σε ανοργάνωτη μορφή κίνησης του ρευστού, λόγω αλληλεπίδρασης της έλικας με το πλοίο και τροποποίησης της συνεκτικής αντίστασης τριβής (viscous drag) και της αντίστασης πίεσης λόγω συνεκτικότητας (viscous pressure drag) στην περιοχή της πρύμνης. Δ. Μηχανικές απώλειες στο αξονικό σύστημα.
Από άποψη ποσοτικής κατανομής των συνολικών απωλειών (25 έως 40%) στις
επί μέρους συνιστώσες Α-Δ ισχύει ο ακόλουθος πίνακας:
1. Απώλειες αξονικής ορμής 5 έως 12% 2. Απώλειες γωνιακής ορμής 5 έως 12% 3. Απώλειες συνεκτικότητας στα πτερύγια της έλικας
3 έως 8%
4. Απώλειες αλληλεπίδρασης έλικας -πλοίου 2 έως 8% 5. Μηχανικές απώλειες στο αξονικό σύστημα 2 έως 4%
Πίνακας 1.
Η σχέση των απωλειών του πίνακα 1 με τους βαθμούς απόδοσης της σχέσης (4) φαίνεται στο ακόλουθο διάγραμμα:
1., 2.,3.4. ,5.
B
B H
s
ee eη
↔ ↔
↔Εξετάζοντας τα στοιχεία του πίνακα 1 παρατηρούμε, ότι η βελτίωση του συντελεστή πρόωσης θα μπορούσε να επιτευχθεί με τους ακόλουθους τρόπους:
5
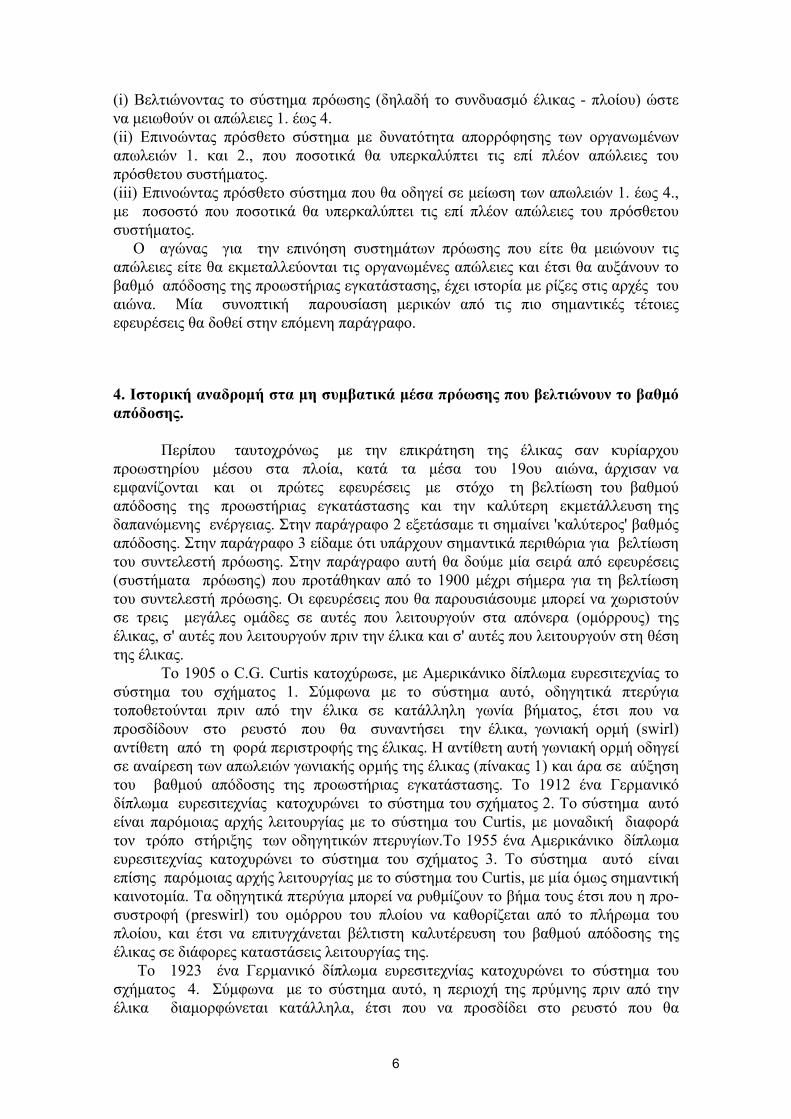
(i) Βελτιώνοντας το σύστημα πρόωσης (δηλαδή το συνδυασμό έλικας - πλοίου) ώστε να μειωθούν οι απώλειες 1. έως 4. (ii) Επινοώντας πρόσθετο σύστημα με δυνατότητα απορρόφησης των οργανωμένων απωλειών 1. και 2., που ποσοτικά θα υπερκαλύπτει τις επί πλέον απώλειες του πρόσθετου συστήματος. (iii) Επινοώντας πρόσθετο σύστημα που θα οδηγεί σε μείωση των απωλειών 1. έως 4., με ποσοστό που ποσοτικά θα υπερκαλύπτει τις επί πλέον απώλειες του πρόσθετου συστήματος. Ο αγώνας για την επινόηση συστημάτων πρόωσης που είτε θα μειώνουν τις απώλειες είτε θα εκμεταλλεύονται τις οργανωμένες απώλειες και έτσι θα αυξάνουν το βαθμό απόδοσης της προωστήριας εγκατάστασης, έχει ιστορία με ρίζες στις αρχές του αιώνα. Μία συνοπτική παρουσίαση μερικών από τις πιο σημαντικές τέτοιες εφευρέσεις θα δοθεί στην επόμενη παράγραφο. 4. Ιστορική αναδρομή στα μη συμβατικά μέσα πρόωσης που βελτιώνουν το βαθμό απόδοσης. Περίπου ταυτοχρόνως με την επικράτηση της έλικας σαν κυρίαρχου προωστηρίου μέσου στα πλοία, κατά τα μέσα του 19ου αιώνα, άρχισαν να εμφανίζονται και οι πρώτες εφευρέσεις με στόχο τη βελτίωση του βαθμού απόδοσης της προωστήριας εγκατάστασης και την καλύτερη εκμετάλλευση της δαπανώμενης ενέργειας. Στην παράγραφο 2 εξετάσαμε τι σημαίνει 'καλύτερος' βαθμός απόδοσης. Στην παράγραφο 3 είδαμε ότι υπάρχουν σημαντικά περιθώρια για βελτίωση του συντελεστή πρόωσης. Στην παράγραφο αυτή θα δούμε μία σειρά από εφευρέσεις (συστήματα πρόωσης) που προτάθηκαν από το 1900 μέχρι σήμερα για τη βελτίωση του συντελεστή πρόωσης. Οι εφευρέσεις που θα παρουσιάσουμε μπορεί να χωριστούν σε τρεις μεγάλες ομάδες σε αυτές που λειτουργούν στα απόνερα (ομόρρους) της έλικας, σ' αυτές που λειτουργούν πριν την έλικα και σ' αυτές που λειτουργούν στη θέση της έλικας. Το 1905 ο C.G. Curtis κατοχύρωσε, με Αμερικάνικο δίπλωμα ευρεσιτεχνίας το σύστημα του σχήματος 1. Σύμφωνα με το σύστημα αυτό, οδηγητικά πτερύγια τοποθετούνται πριν από την έλικα σε κατάλληλη γωνία βήματος, έτσι που να προσδίδουν στο ρευστό που θα συναντήσει την έλικα, γωνιακή ορμή (swirl) αντίθετη από τη φορά περιστροφής της έλικας. Η αντίθετη αυτή γωνιακή ορμή οδηγεί σε αναίρεση των απωλειών γωνιακής ορμής της έλικας (πίνακας 1) και άρα σε αύξηση του βαθμού απόδοσης της προωστήριας εγκατάστασης. Το 1912 ένα Γερμανικό δίπλωμα ευρεσιτεχνίας κατοχυρώνει το σύστημα του σχήματος 2. Το σύστημα αυτό είναι παρόμοιας αρχής λειτουργίας με το σύστημα του Curtis, με μοναδική διαφορά τον τρόπο στήριξης των οδηγητικών πτερυγίων.Το 1955 ένα Αμερικάνικο δίπλωμα ευρεσιτεχνίας κατοχυρώνει το σύστημα του σχήματος 3. Το σύστημα αυτό είναι επίσης παρόμοιας αρχής λειτουργίας με το σύστημα του Curtis, με μία όμως σημαντική καινοτομία. Τα οδηγητικά πτερύγια μπορεί να ρυθμίζουν το βήμα τους έτσι που η προ-συστροφή (preswirl) του ομόρρου του πλοίου να καθορίζεται από το πλήρωμα του πλοίου, και έτσι να επιτυγχάνεται βέλτιστη καλυτέρευση του βαθμού απόδοσης της έλικας σε διάφορες καταστάσεις λειτουργίας της. Το 1923 ένα Γερμανικό δίπλωμα ευρεσιτεχνίας κατοχυρώνει το σύστημα του σχήματος 4. Σύμφωνα με το σύστημα αυτό, η περιοχή της πρύμνης πριν από την έλικα διαμορφώνεται κατάλληλα, έτσι που να προσδίδει στο ρευστό που θα
6
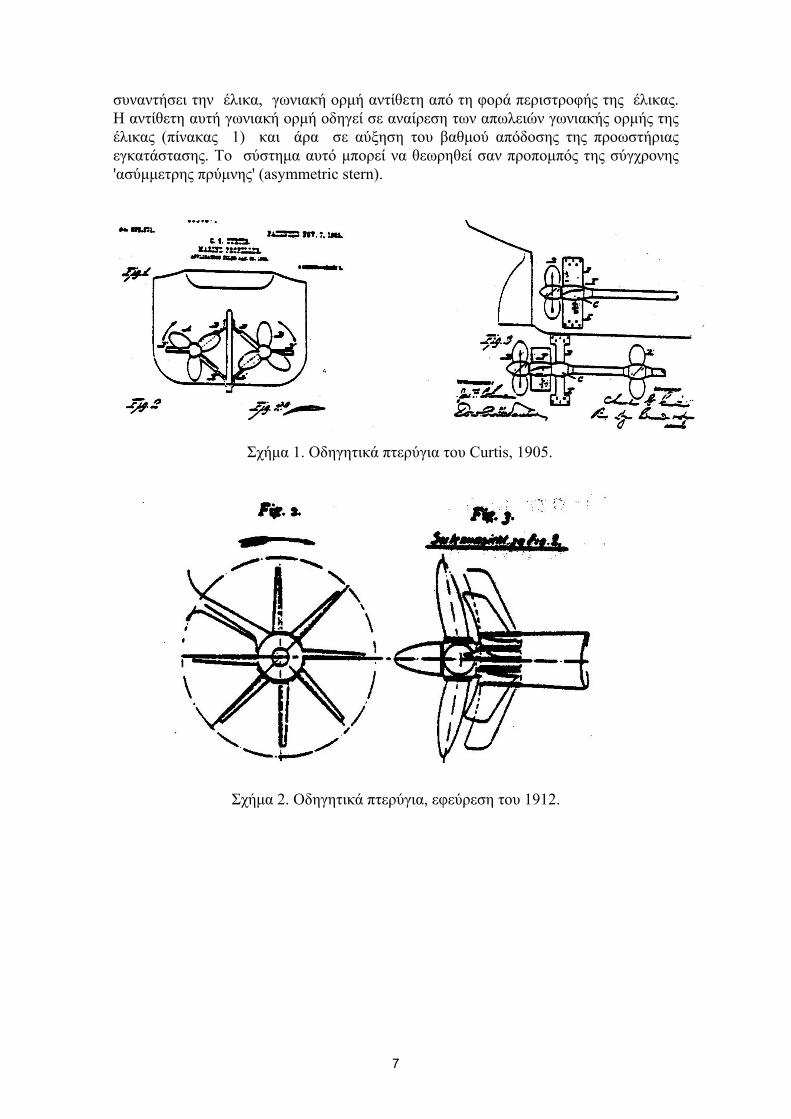
συναντήσει την έλικα, γωνιακή ορμή αντίθετη από τη φορά περιστροφής της έλικας. Η αντίθετη αυτή γωνιακή ορμή οδηγεί σε αναίρεση των απωλειών γωνιακής ορμής της έλικας (πίνακας 1) και άρα σε αύξηση του βαθμού απόδοσης της προωστήριας εγκατάστασης. Το σύστημα αυτό μπορεί να θεωρηθεί σαν προπομπός της σύγχρονης 'ασύμμετρης πρύμνης' (asymmetric stern).
Σχήμα 1. Οδηγητικά πτερύγια του Curtis, 1905.
Σχήμα 2. Οδηγητικά πτερύγια, εφεύρεση του 1912.
7
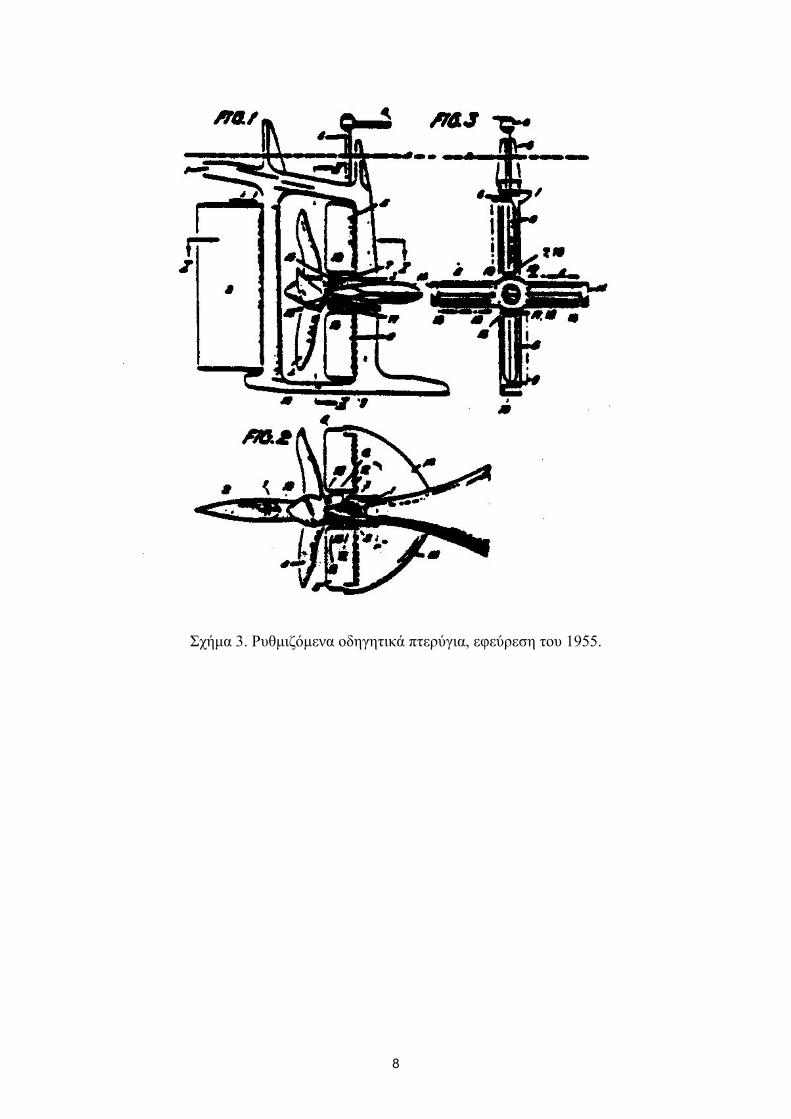
Σχήμα 3. Ρυθμιζόμενα οδηγητικά πτερύγια, εφεύρεση του 1955.
8
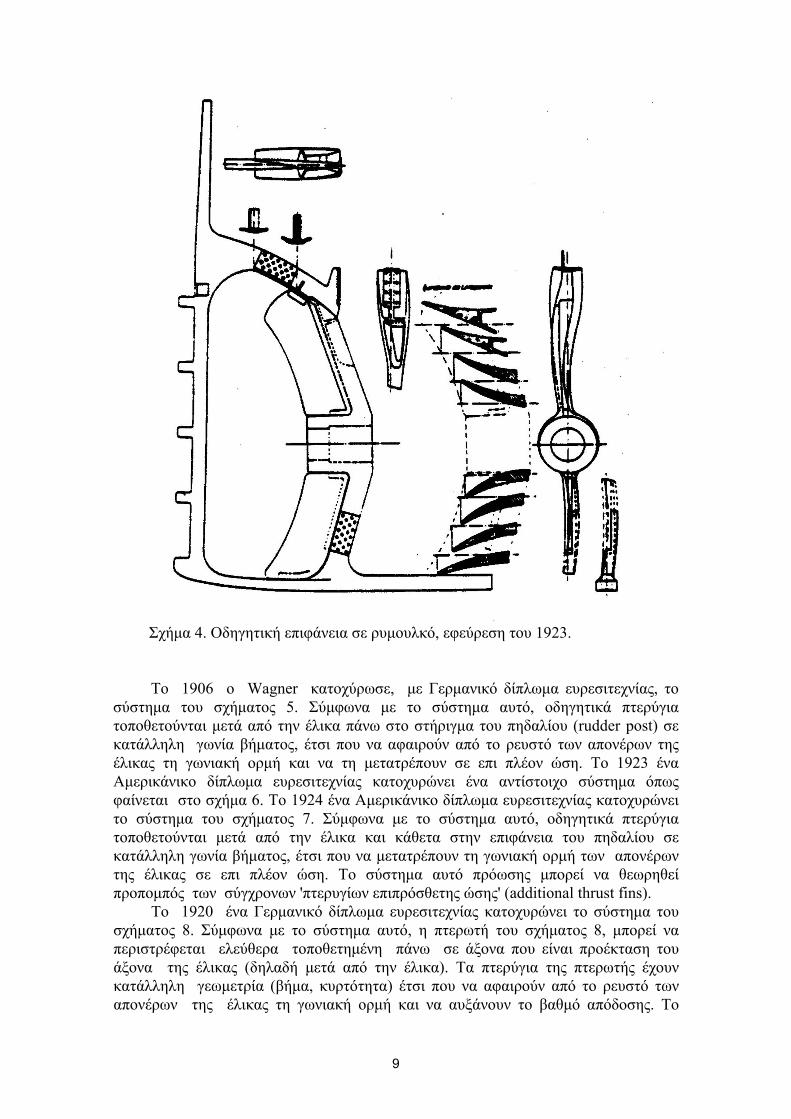
Σχήμα 4. Οδηγητική επιφάνεια σε ρυμουλκό, εφεύρεση του 1923.
Το 1906 ο Wagner κατοχύρωσε, με Γερμανικό δίπλωμα ευρεσιτεχνίας, το σύστημα του σχήματος 5. Σύμφωνα με το σύστημα αυτό, οδηγητικά πτερύγια τοποθετούνται μετά από την έλικα πάνω στο στήριγμα του πηδαλίου (rudder post) σε κατάλληλη γωνία βήματος, έτσι που να αφαιρούν από το ρευστό των απονέρων της έλικας τη γωνιακή ορμή και να τη μετατρέπουν σε επι πλέον ώση. Το 1923 ένα Αμερικάνικο δίπλωμα ευρεσιτεχνίας κατοχυρώνει ένα αντίστοιχο σύστημα όπως φαίνεται στο σχήμα 6. Το 1924 ένα Αμερικάνικο δίπλωμα ευρεσιτεχνίας κατοχυρώνει το σύστημα του σχήματος 7. Σύμφωνα με το σύστημα αυτό, οδηγητικά πτερύγια τοποθετούνται μετά από την έλικα και κάθετα στην επιφάνεια του πηδαλίου σε κατάλληλη γωνία βήματος, έτσι που να μετατρέπουν τη γωνιακή ορμή των απονέρων της έλικας σε επι πλέον ώση. Το σύστημα αυτό πρόωσης μπορεί να θεωρηθεί προπομπός των σύγχρονων 'πτερυγίων επιπρόσθετης ώσης' (additional thrust fins).
Το 1920 ένα Γερμανικό δίπλωμα ευρεσιτεχνίας κατοχυρώνει το σύστημα του σχήματος 8. Σύμφωνα με το σύστημα αυτό, η πτερωτή του σχήματος 8, μπορεί να περιστρέφεται ελεύθερα τοποθετημένη πάνω σε άξονα που είναι προέκταση του άξονα της έλικας (δηλαδή μετά από την έλικα). Τα πτερύγια της πτερωτής έχουν κατάλληλη γεωμετρία (βήμα, κυρτότητα) έτσι που να αφαιρούν από το ρευστό των απονέρων της έλικας τη γωνιακή ορμή και να αυξάνουν το βαθμό απόδοσης. Το
9
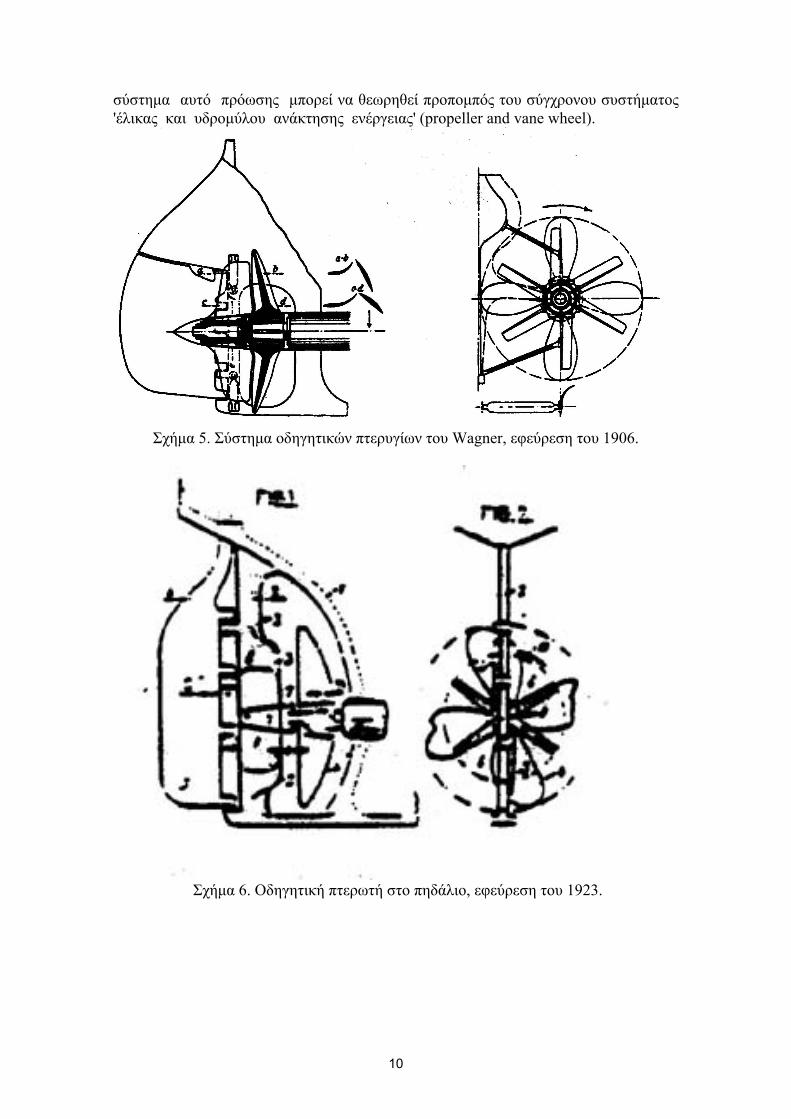
σύστημα αυτό πρόωσης μπορεί να θεωρηθεί προπομπός του σύγχρονου συστήματος 'έλικας και υδρομύλου ανάκτησης ενέργειας' (propeller and vane wheel).
Σχήμα 5. Σύστημα οδηγητικών πτερυγίων του Wagner, εφεύρεση του 1906.
Σχήμα 6. Οδηγητική πτερωτή στο πηδάλιο, εφεύρεση του 1923.
10
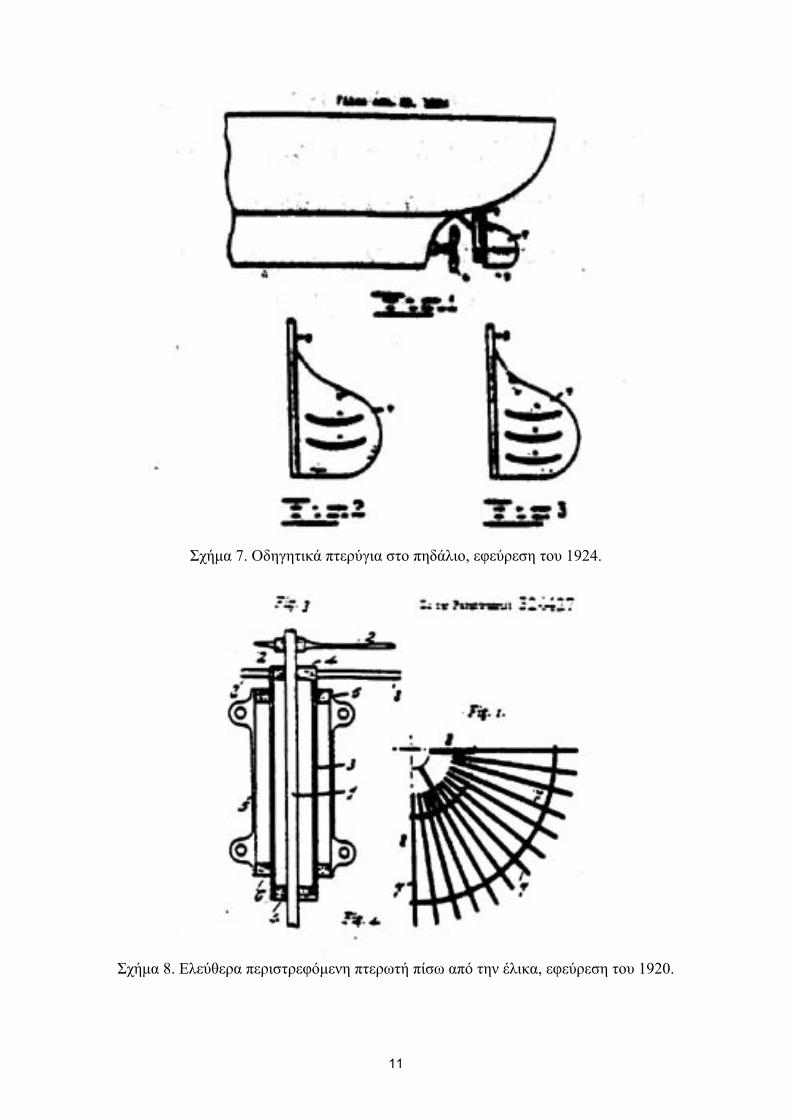
Σχήμα 7. Οδηγητικά πτερύγια στο πηδάλιο, εφεύρεση του 1924.
Σχήμα 8. Ελεύθερα περιστρεφόμενη πτερωτή πίσω από την έλικα, εφεύρεση του 1920.
11
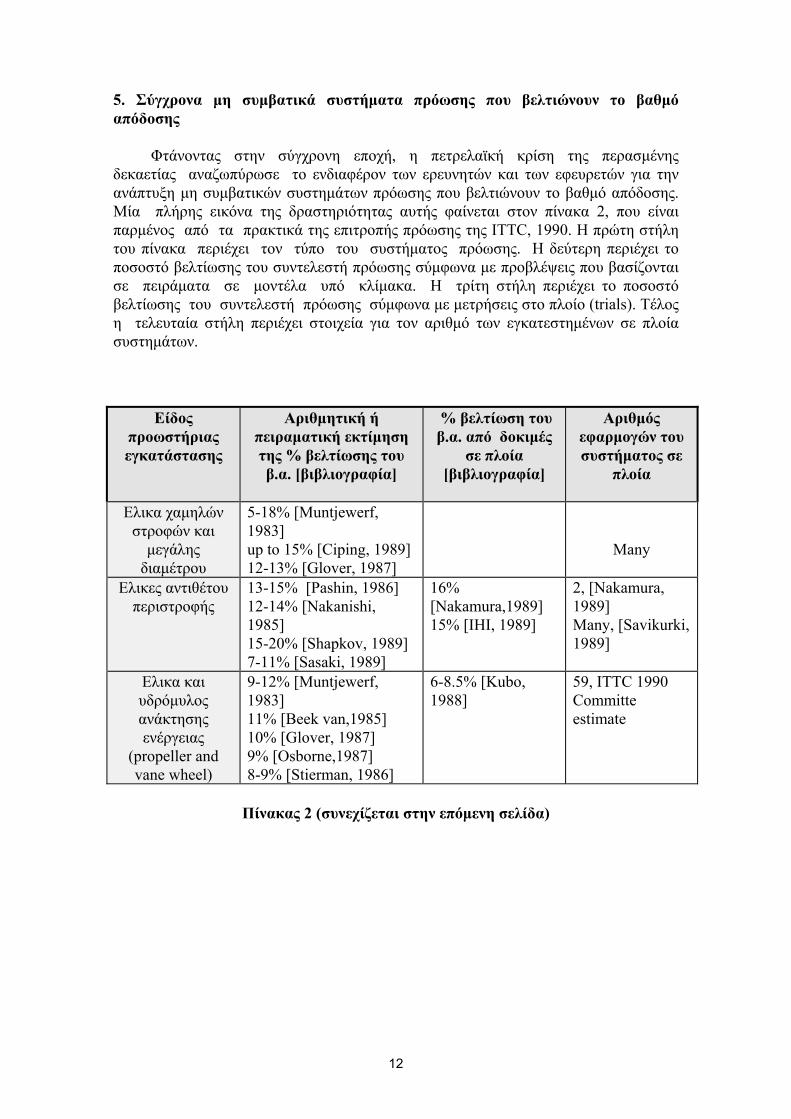
5. Σύγχρονα μη συμβατικά συστήματα πρόωσης που βελτιώνουν το βαθμό απόδοσης
Φτάνοντας στην σύγχρονη εποχή, η πετρελαϊκή κρίση της περασμένης δεκαετίας αναζωπύρωσε το ενδιαφέρον των ερευνητών και των εφευρετών για την ανάπτυξη μη συμβατικών συστημάτων πρόωσης που βελτιώνουν το βαθμό απόδοσης. Μία πλήρης εικόνα της δραστηριότητας αυτής φαίνεται στον πίνακα 2, που είναι παρμένος από τα πρακτικά της επιτροπής πρόωσης της ITTC, 1990. Η πρώτη στήλη του πίνακα περιέχει τον τύπο του συστήματος πρόωσης. Η δεύτερη περιέχει το ποσοστό βελτίωσης του συντελεστή πρόωσης σύμφωνα με προβλέψεις που βασίζονται σε πειράματα σε μοντέλα υπό κλίμακα. Η τρίτη στήλη περιέχει το ποσοστό βελτίωσης του συντελεστή πρόωσης σύμφωνα με μετρήσεις στο πλοίο (trials). Τέλος η τελευταία στήλη περιέχει στοιχεία για τον αριθμό των εγκατεστημένων σε πλοία συστημάτων.
Είδος
προωστήριας εγκατάστασης
Αριθμητική ή πειραματική εκτίμηση της % βελτίωσης του β.α. [βιβλιογραφία]
% βελτίωση του β.α. από δοκιμές
σε πλοία [βιβλιογραφία]
Αριθμός εφαρμογών του συστήματος σε
πλοία
Ελικα χαμηλών στροφών και μεγάλης διαμέτρου
5-18% [Muntjewerf, 1983] up to 15% [Ciping, 1989] 12-13% [Glover, 1987]
Many
Ελικες αντιθέτου περιστροφής
13-15% [Pashin, 1986] 12-14% [Nakanishi, 1985] 15-20% [Shapkov, 1989] 7-11% [Sasaki, 1989]
16% [Nakamura,1989] 15% [IHI, 1989]
2, [Nakamura, 1989] Many, [Savikurki, 1989]
Ελικα και υδρόμυλος ανάκτησης ενέργειας
(propeller and vane wheel)
9-12% [Muntjewerf, 1983] 11% [Beek van,1985] 10% [Glover, 1987] 9% [Osborne,1987] 8-9% [Stierman, 1986]
6-8.5% [Kubo, 1988]
59, ITTC 1990 Committe estimate
Πίνακας 2 (συνεχίζεται στην επόμενη σελίδα)
12
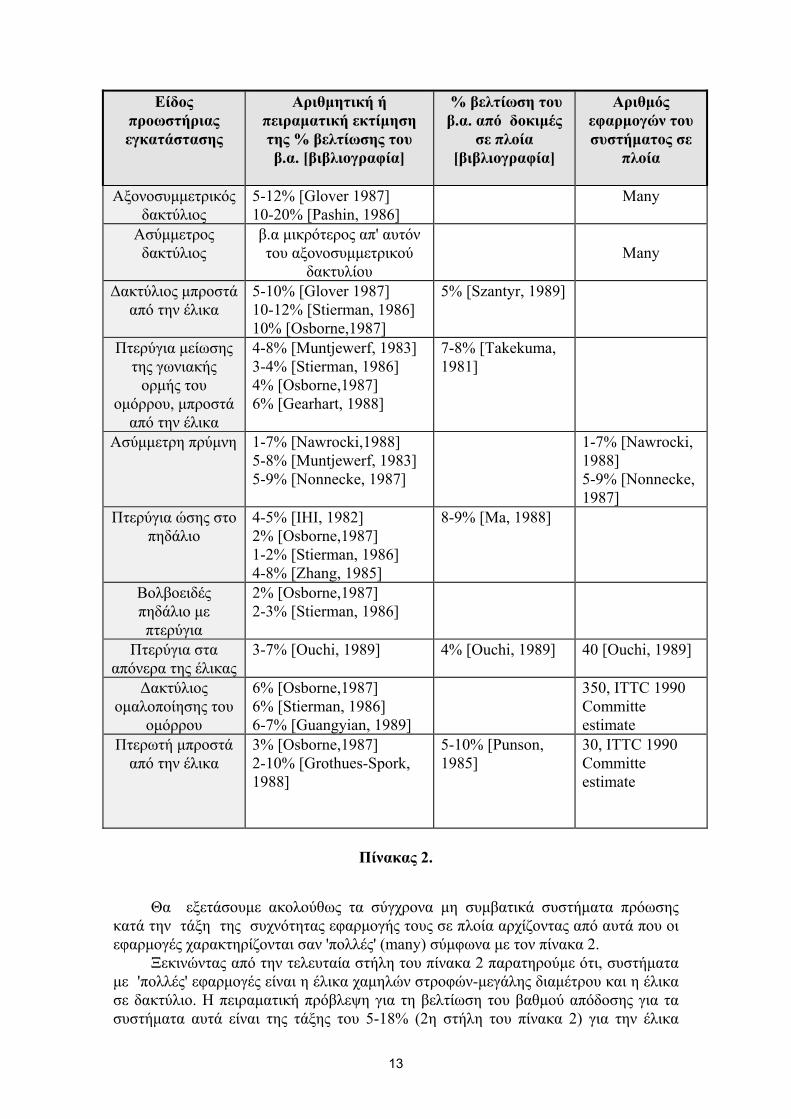
Είδος προωστήριας εγκατάστασης
Αριθμητική ή πειραματική εκτίμηση της % βελτίωσης του β.α. [βιβλιογραφία]
% βελτίωση του β.α. από δοκιμές
σε πλοία [βιβλιογραφία]
Αριθμός εφαρμογών του συστήματος σε
πλοία
Αξονοσυμμετρικός δακτύλιος
5-12% [Glover 1987] 10-20% [Pashin, 1986]
Many
Ασύμμετρος δακτύλιος
β.α μικρότερος απ' αυτόν του αξονοσυμμετρικού
δακτυλίου
Many
Δακτύλιος μπροστά από την έλικα
5-10% [Glover 1987] 10-12% [Stierman, 1986] 10% [Osborne,1987]
5% [Szantyr, 1989]
Πτερύγια μείωσης της γωνιακής ορμής του
ομόρρου, μπροστά από την έλικα
4-8% [Muntjewerf, 1983] 3-4% [Stierman, 1986] 4% [Osborne,1987] 6% [Gearhart, 1988]
7-8% [Takekuma, 1981]
Ασύμμετρη πρύμνη 1-7% [Nawrocki,1988] 5-8% [Muntjewerf, 1983] 5-9% [Nonnecke, 1987]
1-7% [Nawrocki, 1988] 5-9% [Nonnecke, 1987]
Πτερύγια ώσης στο πηδάλιο
4-5% [IHI, 1982] 2% [Osborne,1987] 1-2% [Stierman, 1986] 4-8% [Zhang, 1985]
8-9% [Ma, 1988]
Βολβοειδές πηδάλιο με πτερύγια
2% [Osborne,1987] 2-3% [Stierman, 1986]
Πτερύγια στα απόνερα της έλικας
3-7% [Ouchi, 1989] 4% [Ouchi, 1989] 40 [Ouchi, 1989]
Δακτύλιος ομαλοποίησης του
ομόρρου
6% [Osborne,1987] 6% [Stierman, 1986] 6-7% [Guangyian, 1989]
350, ITTC 1990 Committe estimate
Πτερωτή μπροστά από την έλικα
3% [Osborne,1987] 2-10% [Grothues-Spork, 1988]
5-10% [Punson, 1985]
30, ITTC 1990 Committe estimate
Πίνακας 2.
Θα εξετάσουμε ακολούθως τα σύγχρονα μη συμβατικά συστήματα πρόωσης κατά την τάξη της συχνότητας εφαρμογής τους σε πλοία αρχίζοντας από αυτά που οι εφαρμογές χαρακτηρίζονται σαν 'πολλές' (many) σύμφωνα με τον πίνακα 2.
Ξεκινώντας από την τελευταία στήλη του πίνακα 2 παρατηρούμε ότι, συστήματα με 'πολλές' εφαρμογές είναι η έλικα χαμηλών στροφών-μεγάλης διαμέτρου και η έλικα σε δακτύλιο. Η πειραματική πρόβλεψη για τη βελτίωση του βαθμού απόδοσης για τα συστήματα αυτά είναι της τάξης του 5-18% (2η στήλη του πίνακα 2) για την έλικα
13
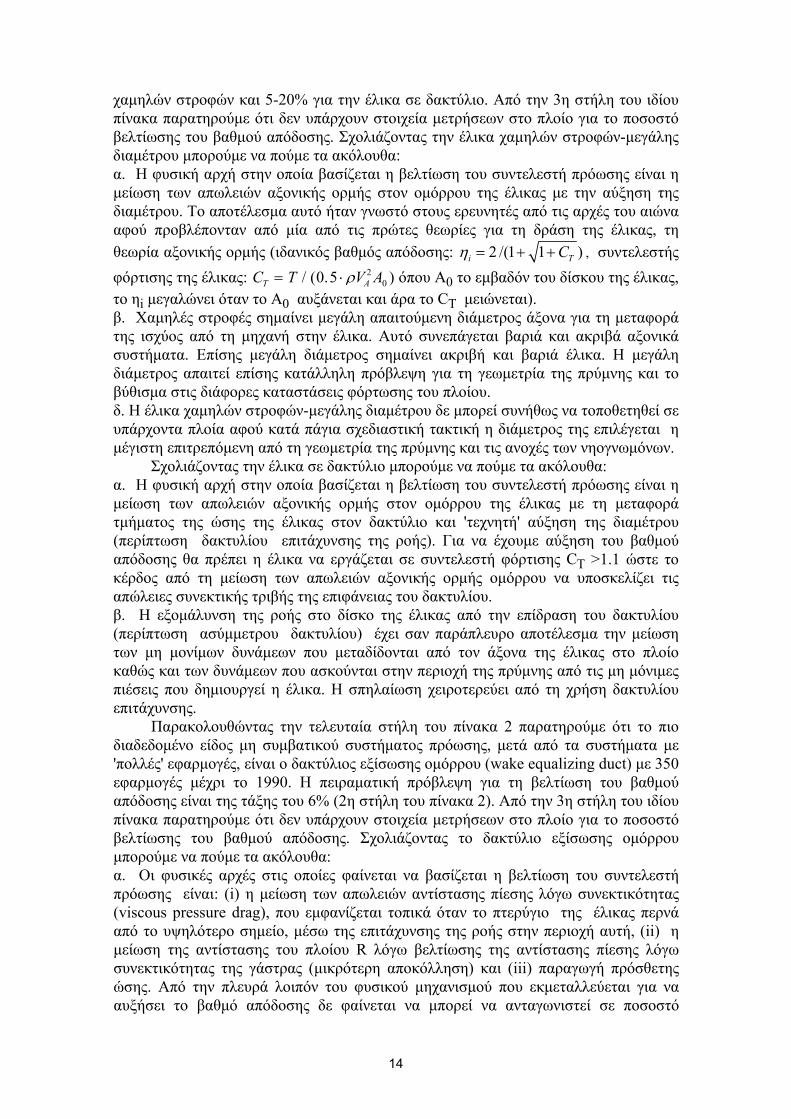
χαμηλών στροφών και 5-20% για την έλικα σε δακτύλιο. Από την 3η στήλη του ιδίου πίνακα παρατηρούμε ότι δεν υπάρχουν στοιχεία μετρήσεων στο πλοίο για το ποσοστό βελτίωσης του βαθμού απόδοσης. Σχολιάζοντας την έλικα χαμηλών στροφών-μεγάλης διαμέτρου μπορούμε να πούμε τα ακόλουθα: α. Η φυσική αρχή στην οποία βασίζεται η βελτίωση του συντελεστή πρόωσης είναι η μείωση των απωλειών αξονικής ορμής στον ομόρρου της έλικας με την αύξηση της διαμέτρου. Το αποτέλεσμα αυτό ήταν γνωστό στους ερευνητές από τις αρχές του αιώνα αφού προβλέπονταν από μία από τις πρώτες θεωρίες για τη δράση της έλικας, τη θεωρία αξονικής ορμής (ιδανικός βαθμός απόδοσης: 2 /(1 1 )i Cη = + + T
A
, συντελεστής φόρτισης της έλικας: C T V AT = ⋅/ ( . )0 5 2
0ρ όπου A0 το εμβαδόν του δίσκου της έλικας, το ηi μεγαλώνει όταν το A0 αυξάνεται και άρα το CT μειώνεται). β. Χαμηλές στροφές σημαίνει μεγάλη απαιτούμενη διάμετρος άξονα για τη μεταφορά της ισχύος από τη μηχανή στην έλικα. Αυτό συνεπάγεται βαριά και ακριβά αξονικά συστήματα. Επίσης μεγάλη διάμετρος σημαίνει ακριβή και βαριά έλικα. Η μεγάλη διάμετρος απαιτεί επίσης κατάλληλη πρόβλεψη για τη γεωμετρία της πρύμνης και το βύθισμα στις διάφορες καταστάσεις φόρτωσης του πλοίου. δ. Η έλικα χαμηλών στροφών-μεγάλης διαμέτρου δε μπορεί συνήθως να τοποθετηθεί σε υπάρχοντα πλοία αφού κατά πάγια σχεδιαστική τακτική η διάμετρος της επιλέγεται η μέγιστη επιτρεπόμενη από τη γεωμετρία της πρύμνης και τις ανοχές των νηογνωμόνων.
Σχολιάζοντας την έλικα σε δακτύλιο μπορούμε να πούμε τα ακόλουθα: α. Η φυσική αρχή στην οποία βασίζεται η βελτίωση του συντελεστή πρόωσης είναι η μείωση των απωλειών αξονικής ορμής στον ομόρρου της έλικας με τη μεταφορά τμήματος της ώσης της έλικας στον δακτύλιο και 'τεχνητή' αύξηση της διαμέτρου (περίπτωση δακτυλίου επιτάχυνσης της ροής). Για να έχουμε αύξηση του βαθμού απόδοσης θα πρέπει η έλικα να εργάζεται σε συντελεστή φόρτισης CT >1.1 ώστε το κέρδος από τη μείωση των απωλειών αξονικής ορμής ομόρρου να υποσκελίζει τις απώλειες συνεκτικής τριβής της επιφάνειας του δακτυλίου. β. Η εξομάλυνση της ροής στο δίσκο της έλικας από την επίδραση του δακτυλίου (περίπτωση ασύμμετρου δακτυλίου) έχει σαν παράπλευρο αποτέλεσμα την μείωση των μη μονίμων δυνάμεων που μεταδίδονται από τον άξονα της έλικας στο πλοίο καθώς και των δυνάμεων που ασκούνται στην περιοχή της πρύμνης από τις μη μόνιμες πιέσεις που δημιουργεί η έλικα. Η σπηλαίωση χειροτερεύει από τη χρήση δακτυλίου επιτάχυνσης.
Παρακολουθώντας την τελευταία στήλη του πίνακα 2 παρατηρούμε ότι το πιο διαδεδομένο είδος μη συμβατικού συστήματος πρόωσης, μετά από τα συστήματα με 'πολλές' εφαρμογές, είναι ο δακτύλιος εξίσωσης ομόρρου (wake equalizing duct) με 350 εφαρμογές μέχρι το 1990. Η πειραματική πρόβλεψη για τη βελτίωση του βαθμού απόδοσης είναι της τάξης του 6% (2η στήλη του πίνακα 2). Από την 3η στήλη του ιδίου πίνακα παρατηρούμε ότι δεν υπάρχουν στοιχεία μετρήσεων στο πλοίο για το ποσοστό βελτίωσης του βαθμού απόδοσης. Σχολιάζοντας το δακτύλιο εξίσωσης ομόρρου μπορούμε να πούμε τα ακόλουθα: α. Οι φυσικές αρχές στις οποίες φαίνεται να βασίζεται η βελτίωση του συντελεστή πρόωσης είναι: (i) η μείωση των απωλειών αντίστασης πίεσης λόγω συνεκτικότητας (viscous pressure drag), που εμφανίζεται τοπικά όταν το πτερύγιο της έλικας περνά από το υψηλότερο σημείο, μέσω της επιτάχυνσης της ροής στην περιοχή αυτή, (ii) η μείωση της αντίστασης του πλοίου R λόγω βελτίωσης της αντίστασης πίεσης λόγω συνεκτικότητας της γάστρας (μικρότερη αποκόλληση) και (iii) παραγωγή πρόσθετης ώσης. Από την πλευρά λοιπόν του φυσικού μηχανισμού που εκμεταλλεύεται για να αυξήσει το βαθμό απόδοσης δε φαίνεται να μπορεί να ανταγωνιστεί σε ποσοστό
14
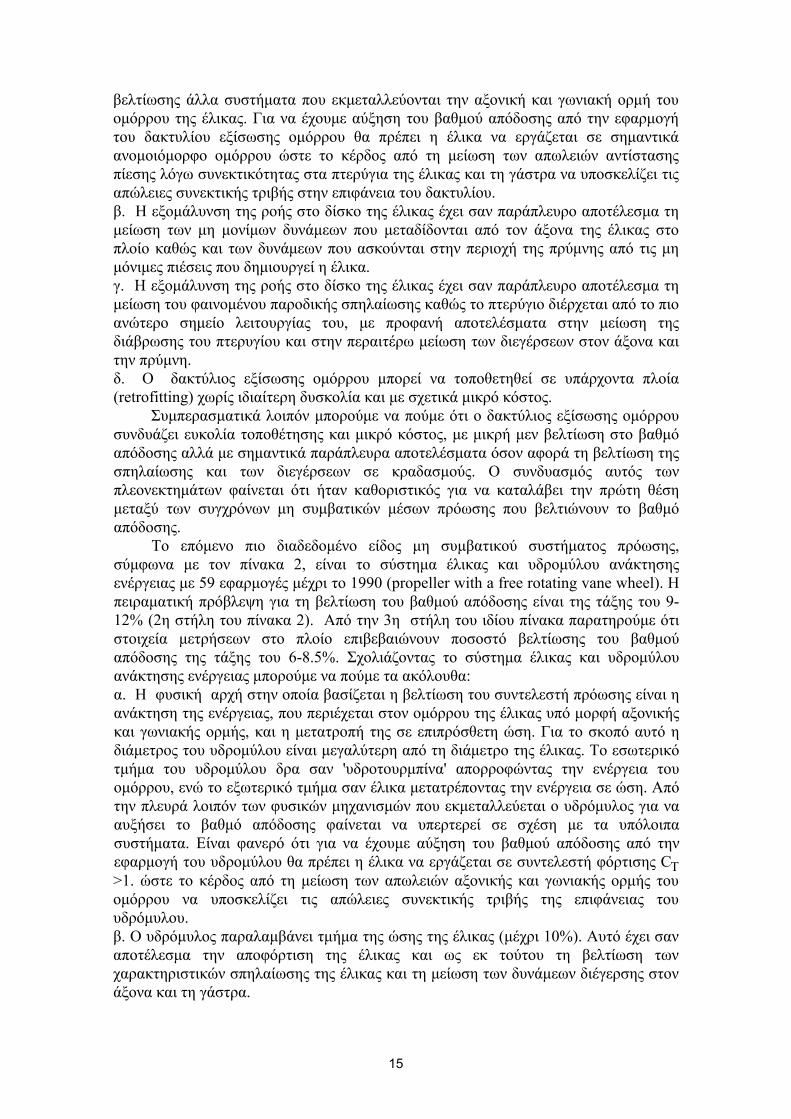
βελτίωσης άλλα συστήματα που εκμεταλλεύονται την αξονική και γωνιακή ορμή του ομόρρου της έλικας. Για να έχουμε αύξηση του βαθμού απόδοσης από την εφαρμογή του δακτυλίου εξίσωσης ομόρρου θα πρέπει η έλικα να εργάζεται σε σημαντικά ανομοιόμορφο ομόρρου ώστε το κέρδος από τη μείωση των απωλειών αντίστασης πίεσης λόγω συνεκτικότητας στα πτερύγια της έλικας και τη γάστρα να υποσκελίζει τις απώλειες συνεκτικής τριβής στην επιφάνεια του δακτυλίου. β. Η εξομάλυνση της ροής στο δίσκο της έλικας έχει σαν παράπλευρο αποτέλεσμα τη μείωση των μη μονίμων δυνάμεων που μεταδίδονται από τον άξονα της έλικας στο πλοίο καθώς και των δυνάμεων που ασκούνται στην περιοχή της πρύμνης από τις μη μόνιμες πιέσεις που δημιουργεί η έλικα. γ. Η εξομάλυνση της ροής στο δίσκο της έλικας έχει σαν παράπλευρο αποτέλεσμα τη μείωση του φαινομένου παροδικής σπηλαίωσης καθώς το πτερύγιο διέρχεται από το πιο ανώτερο σημείο λειτουργίας του, με προφανή αποτελέσματα στην μείωση της διάβρωσης του πτερυγίου και στην περαιτέρω μείωση των διεγέρσεων στον άξονα και την πρύμνη. δ. Ο δακτύλιος εξίσωσης ομόρρου μπορεί να τοποθετηθεί σε υπάρχοντα πλοία (retrofitting) χωρίς ιδιαίτερη δυσκολία και με σχετικά μικρό κόστος.
Συμπερασματικά λοιπόν μπορούμε να πούμε ότι ο δακτύλιος εξίσωσης ομόρρου συνδυάζει ευκολία τοποθέτησης και μικρό κόστος, με μικρή μεν βελτίωση στο βαθμό απόδοσης αλλά με σημαντικά παράπλευρα αποτελέσματα όσον αφορά τη βελτίωση της σπηλαίωσης και των διεγέρσεων σε κραδασμούς. Ο συνδυασμός αυτός των πλεονεκτημάτων φαίνεται ότι ήταν καθοριστικός για να καταλάβει την πρώτη θέση μεταξύ των συγχρόνων μη συμβατικών μέσων πρόωσης που βελτιώνουν το βαθμό απόδοσης.
Το επόμενο πιο διαδεδομένο είδος μη συμβατικού συστήματος πρόωσης, σύμφωνα με τον πίνακα 2, είναι το σύστημα έλικας και υδρομύλου ανάκτησης ενέργειας με 59 εφαρμογές μέχρι το 1990 (propeller with a free rotating vane wheel). Η πειραματική πρόβλεψη για τη βελτίωση του βαθμού απόδοσης είναι της τάξης του 9-12% (2η στήλη του πίνακα 2). Από την 3η στήλη του ιδίου πίνακα παρατηρούμε ότι στοιχεία μετρήσεων στο πλοίο επιβεβαιώνουν ποσοστό βελτίωσης του βαθμού απόδοσης της τάξης του 6-8.5%. Σχολιάζοντας το σύστημα έλικας και υδρομύλου ανάκτησης ενέργειας μπορούμε να πούμε τα ακόλουθα: α. Η φυσική αρχή στην οποία βασίζεται η βελτίωση του συντελεστή πρόωσης είναι η ανάκτηση της ενέργειας, που περιέχεται στον ομόρρου της έλικας υπό μορφή αξονικής και γωνιακής ορμής, και η μετατροπή της σε επιπρόσθετη ώση. Για το σκοπό αυτό η διάμετρος του υδρομύλου είναι μεγαλύτερη από τη διάμετρο της έλικας. Το εσωτερικό τμήμα του υδρομύλου δρα σαν 'υδροτουρμπίνα' απορροφώντας την ενέργεια του ομόρρου, ενώ το εξωτερικό τμήμα σαν έλικα μετατρέποντας την ενέργεια σε ώση. Από την πλευρά λοιπόν των φυσικών μηχανισμών που εκμεταλλεύεται ο υδρόμυλος για να αυξήσει το βαθμό απόδοσης φαίνεται να υπερτερεί σε σχέση με τα υπόλοιπα συστήματα. Είναι φανερό ότι για να έχουμε αύξηση του βαθμού απόδοσης από την εφαρμογή του υδρομύλου θα πρέπει η έλικα να εργάζεται σε συντελεστή φόρτισης CT >1. ώστε το κέρδος από τη μείωση των απωλειών αξονικής και γωνιακής ορμής του ομόρρου να υποσκελίζει τις απώλειες συνεκτικής τριβής της επιφάνειας του υδρόμυλου. β. Ο υδρόμυλος παραλαμβάνει τμήμα της ώσης της έλικας (μέχρι 10%). Αυτό έχει σαν αποτέλεσμα την αποφόρτιση της έλικας και ως εκ τούτου τη βελτίωση των χαρακτηριστικών σπηλαίωσης της έλικας και τη μείωση των δυνάμεων διέγερσης στον άξονα και τη γάστρα.
15
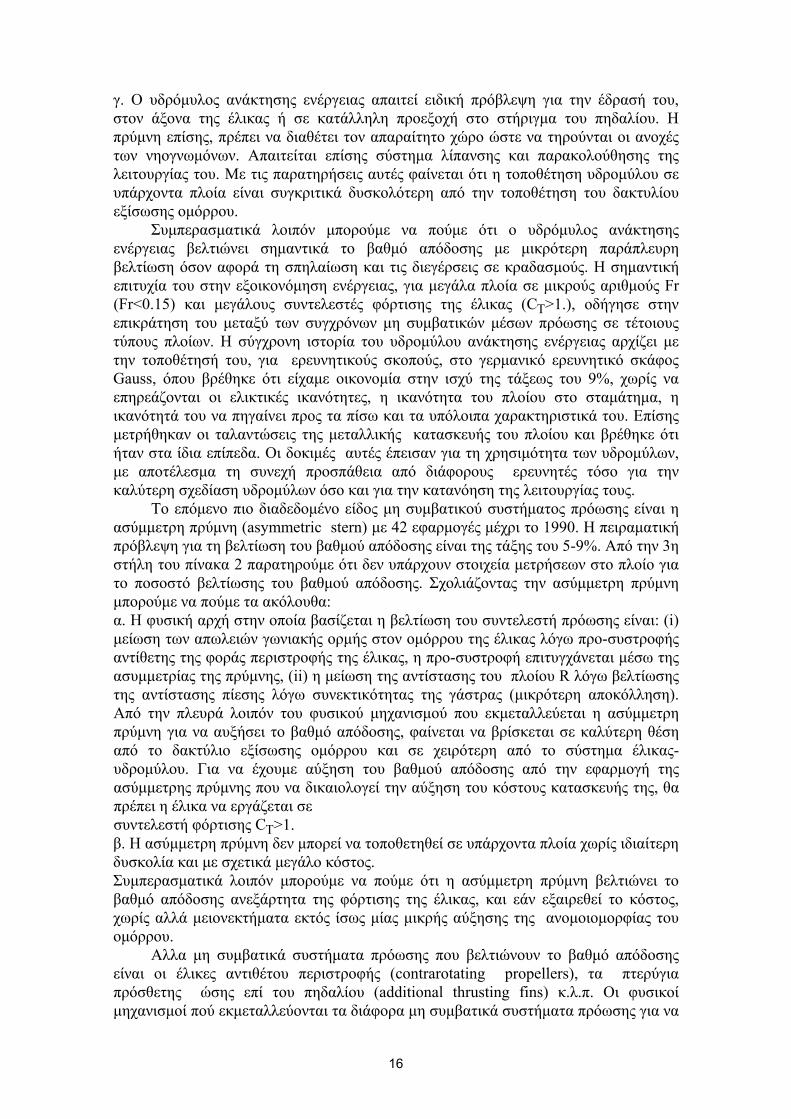
γ. Ο υδρόμυλος ανάκτησης ενέργειας απαιτεί ειδική πρόβλεψη για την έδρασή του, στον άξονα της έλικας ή σε κατάλληλη προεξοχή στο στήριγμα του πηδαλίου. Η πρύμνη επίσης, πρέπει να διαθέτει τον απαραίτητο χώρο ώστε να τηρούνται οι ανοχές των νηογνωμόνων. Απαιτείται επίσης σύστημα λίπανσης και παρακολούθησης της λειτουργίας του. Με τις παρατηρήσεις αυτές φαίνεται ότι η τοποθέτηση υδρομύλου σε υπάρχοντα πλοία είναι συγκριτικά δυσκολότερη από την τοποθέτηση του δακτυλίου εξίσωσης ομόρρου.
Συμπερασματικά λοιπόν μπορούμε να πούμε ότι ο υδρόμυλος ανάκτησης ενέργειας βελτιώνει σημαντικά το βαθμό απόδοσης με μικρότερη παράπλευρη βελτίωση όσον αφορά τη σπηλαίωση και τις διεγέρσεις σε κραδασμούς. Η σημαντική επιτυχία του στην εξοικονόμηση ενέργειας, για μεγάλα πλοία σε μικρούς αριθμούς Fr (Fr<0.15) και μεγάλους συντελεστές φόρτισης της έλικας (CT>1.), οδήγησε στην επικράτηση του μεταξύ των συγχρόνων μη συμβατικών μέσων πρόωσης σε τέτοιους τύπους πλοίων. Η σύγχρονη ιστορία του υδρομύλου ανάκτησης ενέργειας αρχίζει με την τοποθέτησή του, για ερευνητικούς σκοπούς, στο γερμανικό ερευνητικό σκάφος Gauss, όπου βρέθηκε ότι είχαμε οικονομία στην ισχύ της τάξεως του 9%, χωρίς να επηρεάζονται οι ελικτικές ικανότητες, η ικανότητα του πλοίου στο σταμάτημα, η ικανότητά του να πηγαίνει προς τα πίσω και τα υπόλοιπα χαρακτηριστικά του. Επίσης μετρήθηκαν οι ταλαντώσεις της μεταλλικής κατασκευής του πλοίου και βρέθηκε ότι ήταν στα ίδια επίπεδα. Οι δοκιμές αυτές έπεισαν για τη χρησιμότητα των υδρομύλων, με αποτέλεσμα τη συνεχή προσπάθεια από διάφορους ερευνητές τόσο για την καλύτερη σχεδίαση υδρομύλων όσο και για την κατανόηση της λειτουργίας τους.
Το επόμενο πιο διαδεδομένο είδος μη συμβατικού συστήματος πρόωσης είναι η ασύμμετρη πρύμνη (asymmetric stern) με 42 εφαρμογές μέχρι το 1990. Η πειραματική πρόβλεψη για τη βελτίωση του βαθμού απόδοσης είναι της τάξης του 5-9%. Από την 3η στήλη του πίνακα 2 παρατηρούμε ότι δεν υπάρχουν στοιχεία μετρήσεων στο πλοίο για το ποσοστό βελτίωσης του βαθμού απόδοσης. Σχολιάζοντας την ασύμμετρη πρύμνη μπορούμε να πούμε τα ακόλουθα: α. Η φυσική αρχή στην οποία βασίζεται η βελτίωση του συντελεστή πρόωσης είναι: (i) μείωση των απωλειών γωνιακής ορμής στον ομόρρου της έλικας λόγω προ-συστροφής αντίθετης της φοράς περιστροφής της έλικας, η προ-συστροφή επιτυγχάνεται μέσω της ασυμμετρίας της πρύμνης, (ii) η μείωση της αντίστασης του πλοίου R λόγω βελτίωσης της αντίστασης πίεσης λόγω συνεκτικότητας της γάστρας (μικρότερη αποκόλληση). Από την πλευρά λοιπόν του φυσικού μηχανισμού που εκμεταλλεύεται η ασύμμετρη πρύμνη για να αυξήσει το βαθμό απόδοσης, φαίνεται να βρίσκεται σε καλύτερη θέση από το δακτύλιο εξίσωσης ομόρρου και σε χειρότερη από το σύστημα έλικας-υδρομύλου. Για να έχουμε αύξηση του βαθμού απόδοσης από την εφαρμογή της ασύμμετρης πρύμνης που να δικαιολογεί την αύξηση του κόστους κατασκευής της, θα πρέπει η έλικα να εργάζεται σε συντελεστή φόρτισης CT>1. β. Η ασύμμετρη πρύμνη δεν μπορεί να τοποθετηθεί σε υπάρχοντα πλοία χωρίς ιδιαίτερη δυσκολία και με σχετικά μεγάλο κόστος. Συμπερασματικά λοιπόν μπορούμε να πούμε ότι η ασύμμετρη πρύμνη βελτιώνει το βαθμό απόδοσης ανεξάρτητα της φόρτισης της έλικας, και εάν εξαιρεθεί το κόστος, χωρίς αλλά μειονεκτήματα εκτός ίσως μίας μικρής αύξησης της ανομοιομορφίας του ομόρρου.
Αλλα μη συμβατικά συστήματα πρόωσης που βελτιώνουν το βαθμό απόδοσης είναι οι έλικες αντιθέτου περιστροφής (contrarotating propellers), τα πτερύγια πρόσθετης ώσης επί του πηδαλίου (additional thrusting fins) κ.λ.π. Οι φυσικοί μηχανισμοί πού εκμεταλλεύονται τα διάφορα μη συμβατικά συστήματα πρόωσης για να
16
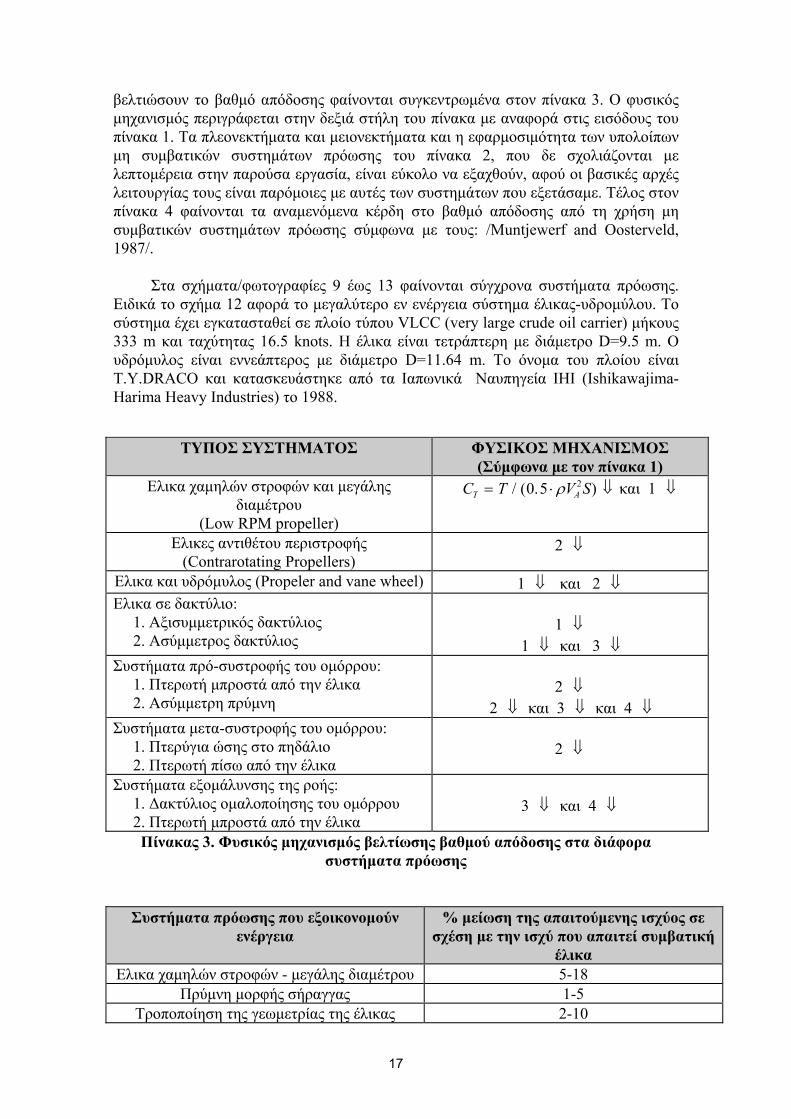
βελτιώσουν το βαθμό απόδοσης φαίνονται συγκεντρωμένα στον πίνακα 3. Ο φυσικός μηχανισμός περιγράφεται στην δεξιά στήλη του πίνακα με αναφορά στις εισόδους του πίνακα 1. Τα πλεονεκτήματα και μειονεκτήματα και η εφαρμοσιμότητα των υπολοίπων μη συμβατικών συστημάτων πρόωσης του πίνακα 2, που δε σχολιάζονται με λεπτομέρεια στην παρούσα εργασία, είναι εύκολο να εξαχθούν, αφού οι βασικές αρχές λειτουργίας τους είναι παρόμοιες με αυτές των συστημάτων που εξετάσαμε. Τέλος στον πίνακα 4 φαίνονται τα αναμενόμενα κέρδη στο βαθμό απόδοσης από τη χρήση μη συμβατικών συστημάτων πρόωσης σύμφωνα με τους: /Muntjewerf and Oosterveld, 1987/.
Στα σχήματα/φωτογραφίες 9 έως 13 φαίνονται σύγχρονα συστήματα πρόωσης.
Ειδικά το σχήμα 12 αφορά το μεγαλύτερο εν ενέργεια σύστημα έλικας-υδρομύλου. Το σύστημα έχει εγκατασταθεί σε πλοίο τύπου VLCC (very large crude oil carrier) μήκους 333 m και ταχύτητας 16.5 knots. Η έλικα είναι τετράπτερη με διάμετρο D=9.5 m. Ο υδρόμυλος είναι εννεάπτερος με διάμετρο D=11.64 m. Το όνομα του πλοίου είναι T.Y.DRACO και κατασκευάστηκε από τα Ιαπωνικά Ναυπηγεία ΙΗΙ (Ishikawajima-Harima Heavy Industries) το 1988.
ΤΥΠΟΣ ΣΥΣΤΗΜΑΤΟΣ ΦΥΣΙΚΟΣ ΜΗΧΑΝΙΣΜΟΣ (Σύμφωνα με τον πίνακα 1)
Ελικα χαμηλών στροφών και μεγάλης διαμέτρου
(Low RPM propeller)
C T V ST A= ⋅/ ( . )0 5 2ρ και 1 ⇓ ⇓
Ελικες αντιθέτου περιστροφής (Contrarotating Propellers)
2 ⇓
Ελικα και υδρόμυλος (Propeler and vane wheel) 1 και 2 ⇓ ⇓Ελικα σε δακτύλιο: 1. Αξισυμμετρικός δακτύλιος 2. Ασύμμετρος δακτύλιος
1 ⇓
1 και 3 ⇓ ⇓Συστήματα πρό-συστροφής του ομόρρου: 1. Πτερωτή μπροστά από την έλικα 2. Ασύμμετρη πρύμνη
2 ⇓
2 και 3 και 4 ⇓ ⇓ ⇓Συστήματα μετα-συστροφής του ομόρρου: 1. Πτερύγια ώσης στο πηδάλιο 2. Πτερωτή πίσω από την έλικα
2 ⇓
Συστήματα εξομάλυνσης της ροής: 1. Δακτύλιος ομαλοποίησης του ομόρρου 2. Πτερωτή μπροστά από την έλικα
3 και 4 ⇓ ⇓
Πίνακας 3. Φυσικός μηχανισμός βελτίωσης βαθμού απόδοσης στα διάφορα συστήματα πρόωσης
Συστήματα πρόωσης που εξοικονομούν ενέργεια
% μείωση της απαιτούμενης ισχύος σε σχέση με την ισχύ που απαιτεί συμβατική
έλικα Ελικα χαμηλών στροφών - μεγάλης διαμέτρου 5-18
Πρύμνη μορφής σήραγγας 1-5 Τροποποίηση της γεωμετρίας της έλικας 2-10
17
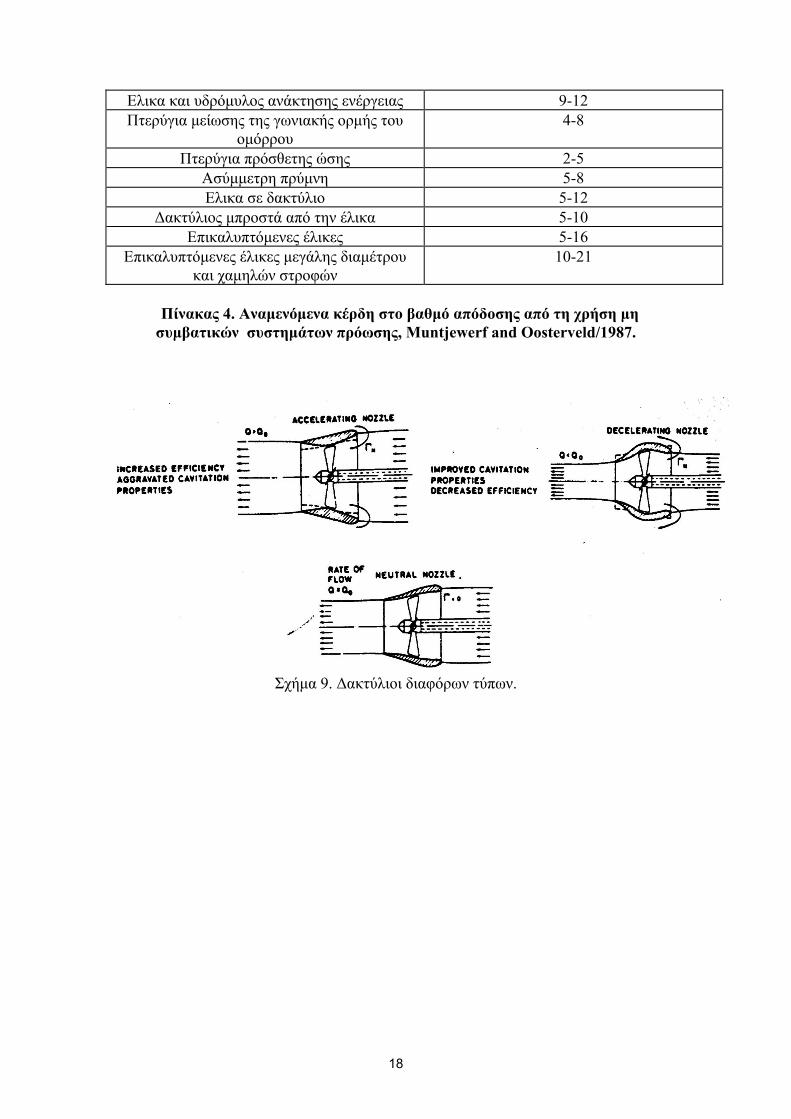
Ελικα και υδρόμυλος ανάκτησης ενέργειας 9-12 Πτερύγια μείωσης της γωνιακής ορμής του
ομόρρου 4-8
Πτερύγια πρόσθετης ώσης 2-5 Ασύμμετρη πρύμνη 5-8 Ελικα σε δακτύλιο 5-12
Δακτύλιος μπροστά από την έλικα 5-10 Επικαλυπτόμενες έλικες 5-16
Επικαλυπτόμενες έλικες μεγάλης διαμέτρου και χαμηλών στροφών
10-21
Πίνακας 4. Αναμενόμενα κέρδη στο βαθμό απόδοσης από τη χρήση μη συμβατικών συστημάτων πρόωσης, Muntjewerf and Oosterveld/1987.
Σχήμα 9. Δακτύλιοι διαφόρων τύπων.
18
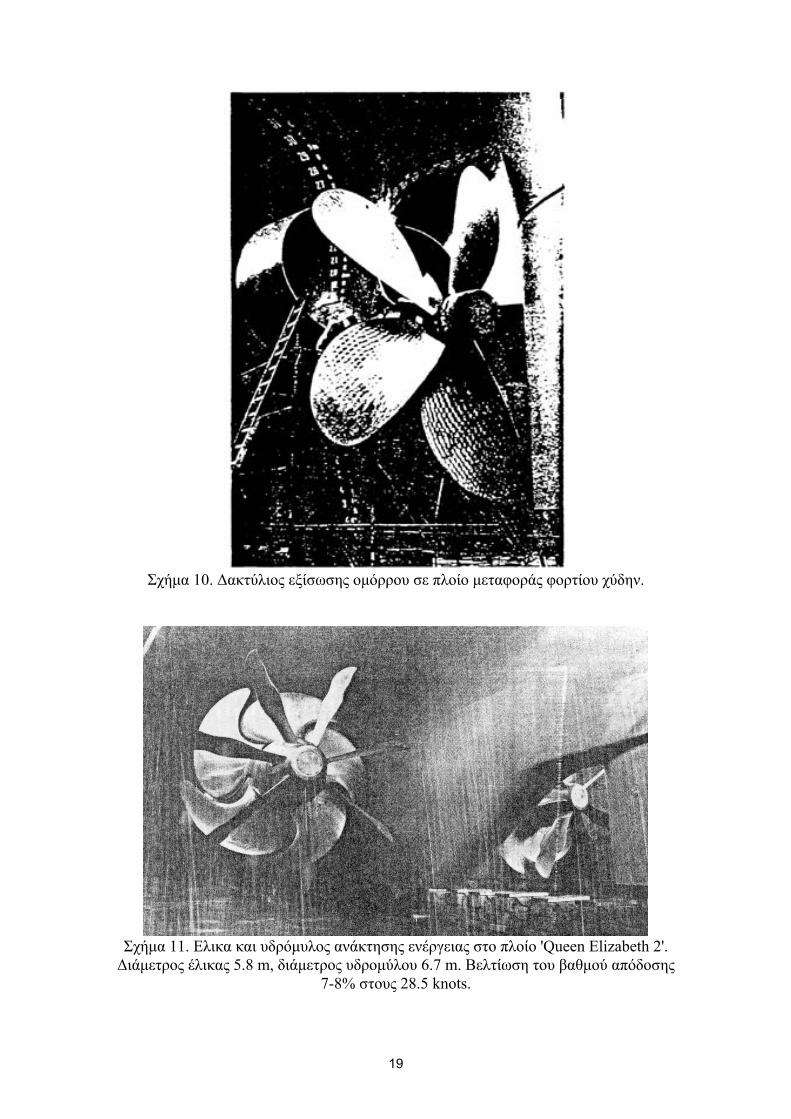
Σχήμα 10. Δακτύλιος εξίσωσης ομόρρου σε πλοίο μεταφοράς φορτίου χύδην.
Σχήμα 11. Ελικα και υδρόμυλος ανάκτησης ενέργειας στο πλοίο 'Queen Elizabeth 2'. Διάμετρος έλικας 5.8 m, διάμετρος υδρομύλου 6.7 m. Βελτίωση του βαθμού απόδοσης
7-8% στους 28.5 knots.
19
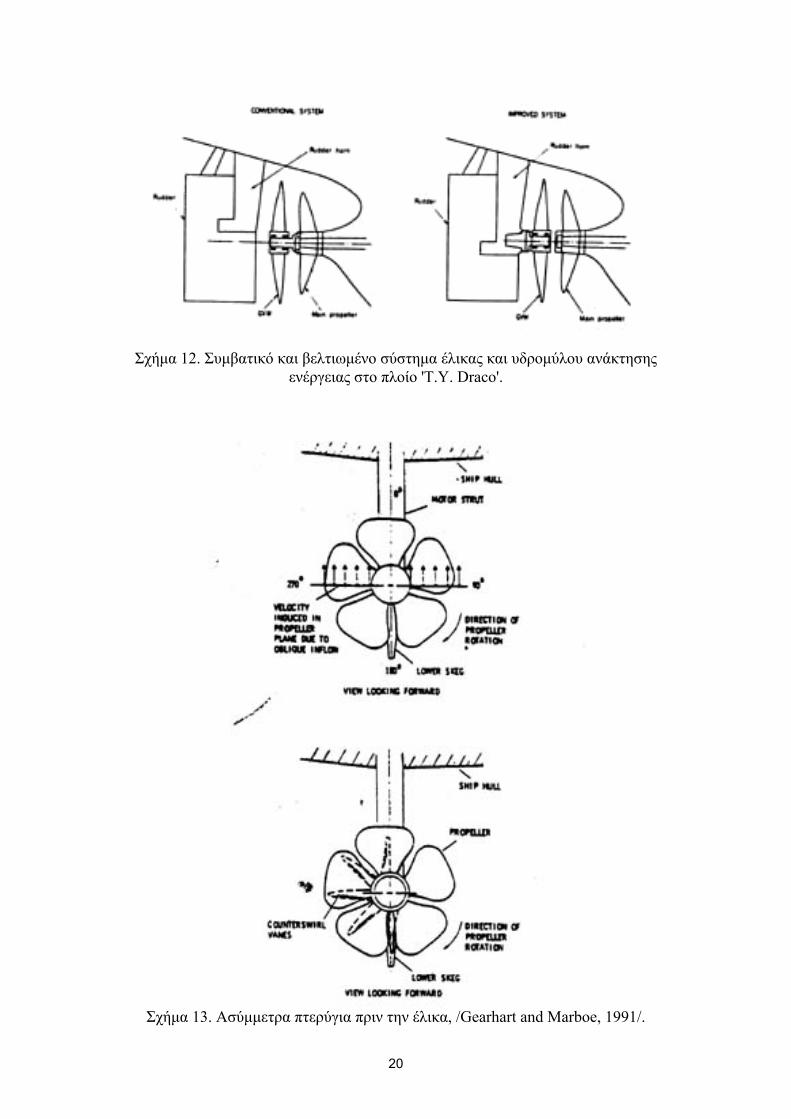
Σχήμα 12. Συμβατικό και βελτιωμένο σύστημα έλικας και υδρομύλου ανάκτησης ενέργειας στο πλοίο 'T.Y. Draco'.
Σχήμα 13. Ασύμμετρα πτερύγια πριν την έλικα, /Gearhart and Marboe, 1991/.
20
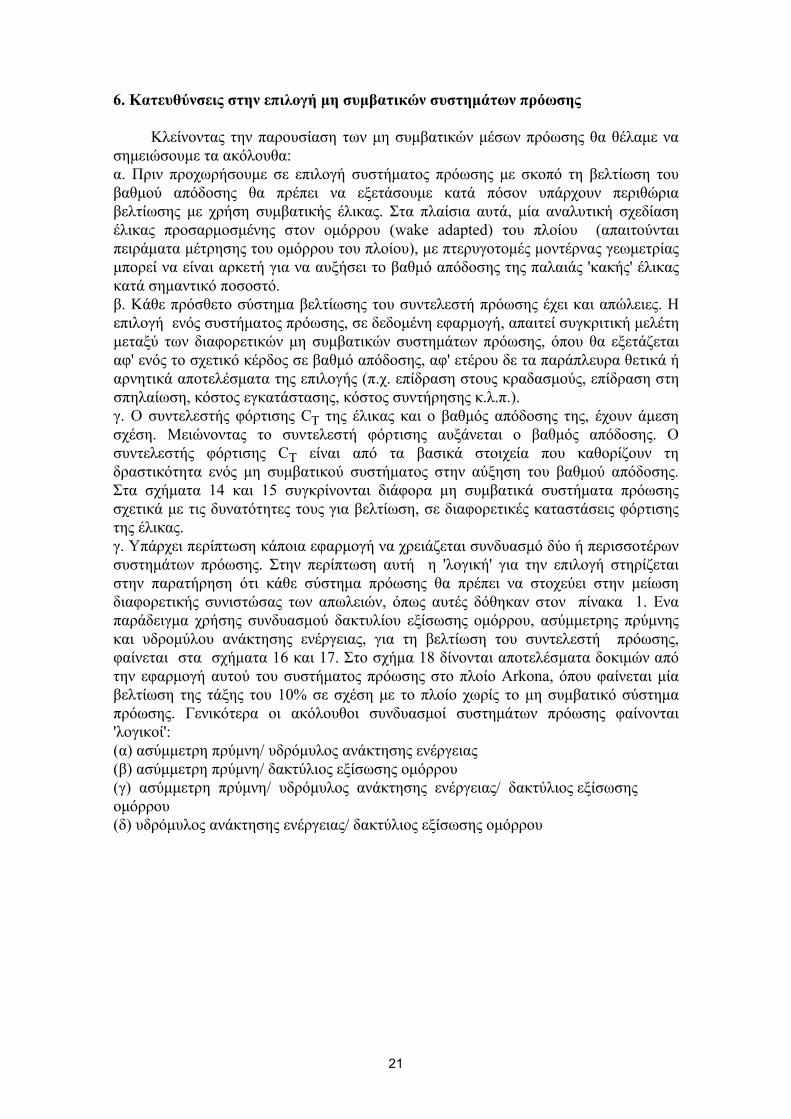
6. Κατευθύνσεις στην επιλογή μη συμβατικών συστημάτων πρόωσης
Κλείνοντας την παρουσίαση των μη συμβατικών μέσων πρόωσης θα θέλαμε να σημειώσουμε τα ακόλουθα: α. Πριν προχωρήσουμε σε επιλογή συστήματος πρόωσης με σκοπό τη βελτίωση του βαθμού απόδοσης θα πρέπει να εξετάσουμε κατά πόσον υπάρχουν περιθώρια βελτίωσης με χρήση συμβατικής έλικας. Στα πλαίσια αυτά, μία αναλυτική σχεδίαση έλικας προσαρμοσμένης στον ομόρρου (wake adapted) του πλοίου (απαιτούνται πειράματα μέτρησης του ομόρρου του πλοίου), με πτερυγοτομές μοντέρνας γεωμετρίας μπορεί να είναι αρκετή για να αυξήσει το βαθμό απόδοσης της παλαιάς 'κακής' έλικας κατά σημαντικό ποσοστό. β. Κάθε πρόσθετο σύστημα βελτίωσης του συντελεστή πρόωσης έχει και απώλειες. Η επιλογή ενός συστήματος πρόωσης, σε δεδομένη εφαρμογή, απαιτεί συγκριτική μελέτη μεταξύ των διαφορετικών μη συμβατικών συστημάτων πρόωσης, όπου θα εξετάζεται αφ' ενός το σχετικό κέρδος σε βαθμό απόδοσης, αφ' ετέρου δε τα παράπλευρα θετικά ή αρνητικά αποτελέσματα της επιλογής (π.χ. επίδραση στους κραδασμούς, επίδραση στη σπηλαίωση, κόστος εγκατάστασης, κόστος συντήρησης κ.λ.π.). γ. Ο συντελεστής φόρτισης CΤ της έλικας και ο βαθμός απόδοσης της, έχουν άμεση σχέση. Μειώνοντας το συντελεστή φόρτισης αυξάνεται ο βαθμός απόδοσης. Ο συντελεστής φόρτισης CΤ είναι από τα βασικά στοιχεία που καθορίζουν τη δραστικότητα ενός μη συμβατικού συστήματος στην αύξηση του βαθμού απόδοσης. Στα σχήματα 14 και 15 συγκρίνονται διάφορα μη συμβατικά συστήματα πρόωσης σχετικά με τις δυνατότητες τους για βελτίωση, σε διαφορετικές καταστάσεις φόρτισης της έλικας. γ. Υπάρχει περίπτωση κάποια εφαρμογή να χρειάζεται συνδυασμό δύο ή περισσοτέρων συστημάτων πρόωσης. Στην περίπτωση αυτή η 'λογική' για την επιλογή στηρίζεται στην παρατήρηση ότι κάθε σύστημα πρόωσης θα πρέπει να στοχεύει στην μείωση διαφορετικής συνιστώσας των απωλειών, όπως αυτές δόθηκαν στον πίνακα 1. Ενα παράδειγμα χρήσης συνδυασμού δακτυλίου εξίσωσης ομόρρου, ασύμμετρης πρύμνης και υδρομύλου ανάκτησης ενέργειας, για τη βελτίωση του συντελεστή πρόωσης, φαίνεται στα σχήματα 16 και 17. Στο σχήμα 18 δίνονται αποτελέσματα δοκιμών από την εφαρμογή αυτού του συστήματος πρόωσης στο πλοίο Arkona, όπου φαίνεται μία βελτίωση της τάξης του 10% σε σχέση με το πλοίο χωρίς το μη συμβατικό σύστημα πρόωσης. Γενικότερα οι ακόλουθοι συνδυασμοί συστημάτων πρόωσης φαίνονται 'λογικοί': (α) ασύμμετρη πρύμνη/ υδρόμυλος ανάκτησης ενέργειας (β) ασύμμετρη πρύμνη/ δακτύλιος εξίσωσης ομόρρου (γ) ασύμμετρη πρύμνη/ υδρόμυλος ανάκτησης ενέργειας/ δακτύλιος εξίσωσης ομόρρου (δ) υδρόμυλος ανάκτησης ενέργειας/ δακτύλιος εξίσωσης ομόρρου
21
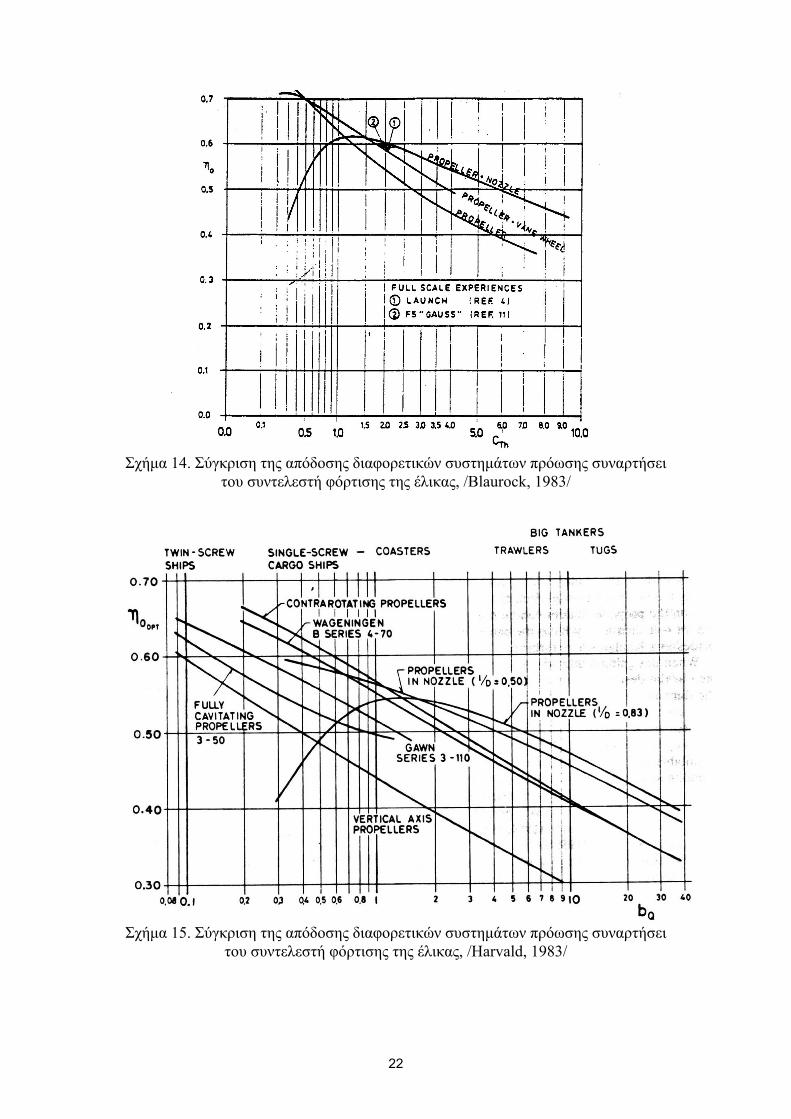
Σχήμα 14. Σύγκριση της απόδοσης διαφορετικών συστημάτων πρόωσης συναρτήσει
του συντελεστή φόρτισης της έλικας, /Blaurock, 1983/
Σχήμα 15. Σύγκριση της απόδοσης διαφορετικών συστημάτων πρόωσης συναρτήσει
του συντελεστή φόρτισης της έλικας, /Harvald, 1983/
22
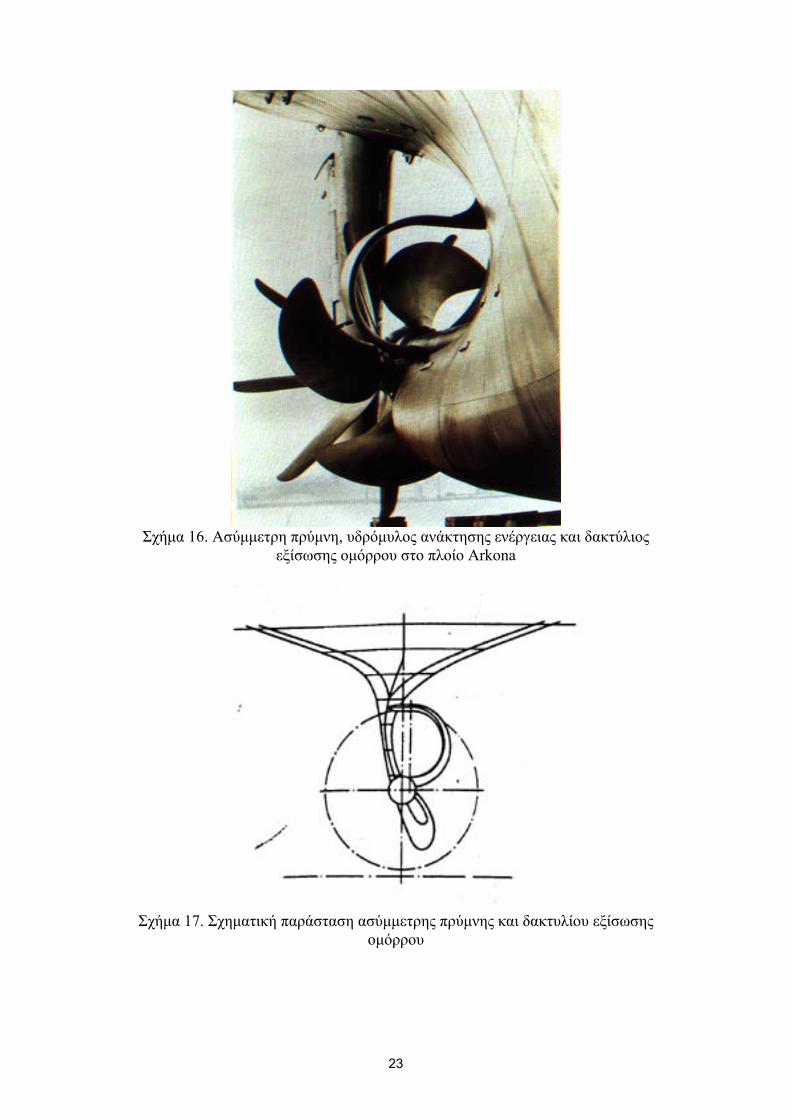
Σχήμα 16. Ασύμμετρη πρύμνη, υδρόμυλος ανάκτησης ενέργειας και δακτύλιος
εξίσωσης ομόρρου στο πλοίο Arkona
Σχήμα 17. Σχηματική παράσταση ασύμμετρης πρύμνης και δακτυλίου εξίσωσης
ομόρρου
23
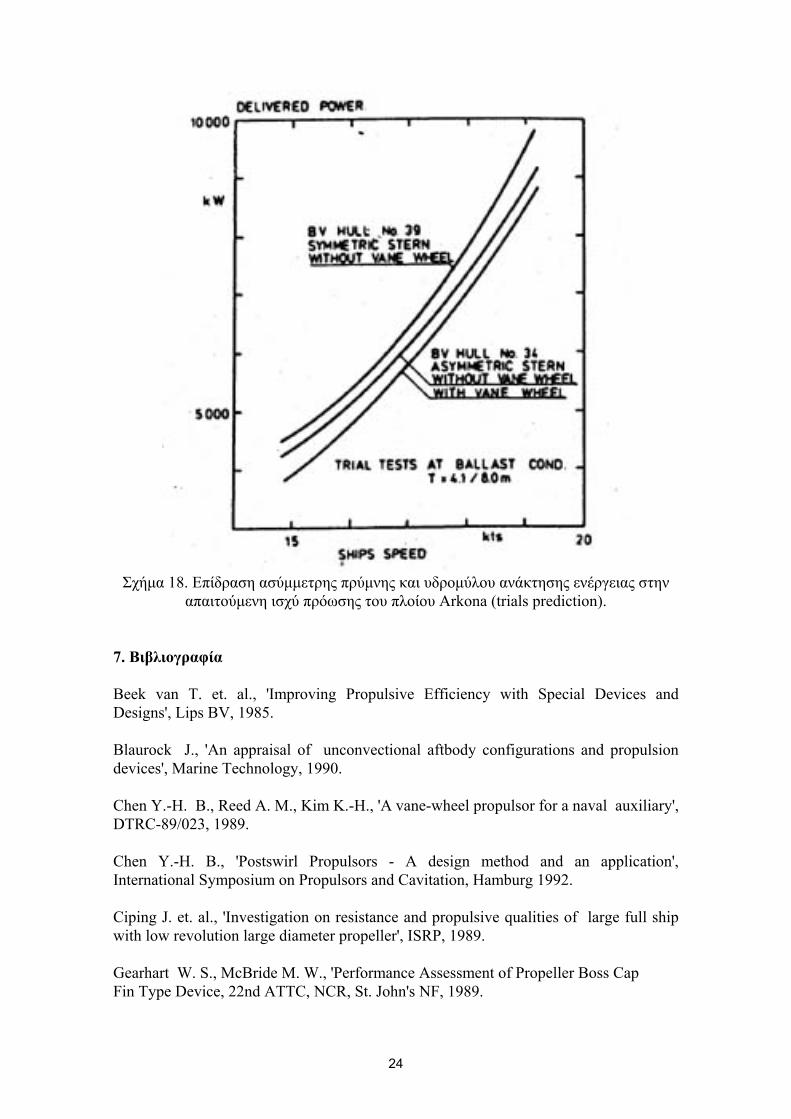
Σχήμα 18. Επίδραση ασύμμετρης πρύμνης και υδρομύλου ανάκτησης ενέργειας στην
απαιτούμενη ισχύ πρόωσης του πλοίου Arkona (trials prediction). 7. Βιβλιογραφία Beek van T. et. al., 'Improving Propulsive Efficiency with Special Devices and Designs', Lips BV, 1985. Blaurock J., 'An appraisal of unconvectional aftbody configurations and propulsion devices', Marine Technology, 1990. Chen Y.-H. B., Reed A. M., Kim K.-H., 'A vane-wheel propulsor for a naval auxiliary', DTRC-89/023, 1989. Chen Y.-H. B., 'Postswirl Propulsors - A design method and an application', International Symposium on Propulsors and Cavitation, Hamburg 1992. Ciping J. et. al., 'Investigation on resistance and propulsive qualities of large full ship with low revolution large diameter propeller', ISRP, 1989. Gearhart W. S., McBride M. W., 'Performance Assessment of Propeller Boss Cap Fin Type Device, 22nd ATTC, NCR, St. John's NF, 1989.
24
Glover E. J., 'Propulsive Devices for Improved Propulsive Efficiency', Inst. Mar. Engrs. Trans., Vol 99, 7, 1987. Grim O., 'Propeller and Vane Wheel', JSR, 1980. Grothues-Spork H., 'Bilge Vortex Control Devices and their Benefits for Propulsion', I.S.P., p. 183, 1988. Guangyian F. et. al., 'Experiments with a Flow Straightening Nozzle of Ship Model for a 10,000 DWT Bulk Carrier', ISRP, 1989. Harvald, SV. AA., 'Resistance and Propulsion of Ships' , Wiley Interscience Publication, John Wiley and Sons, 1983. IHI, IHI Bul. Vol 16, No 182, 1982. IHI Review, 'JUNO-37000 DWT Class Contra-Rotating Propelled Vessel', IHI, Vol 29, pp. 258-264, 1989. ITTC, 1990 Report of the propulsor committee Kerwin J. E., Coney W. B., Hsin C.-Y., 'Optimum circulation distribution for single and multi-component propulsors', 21st American Towing Tank Conference, Washington D.C., 1986. Kerwin J. E., Coney W. B., Hsin C.-Y., 'Hydrodynamic aspects of propeller/stator design', Propellers '88 Symposium, 1988. Kubo H. et. al., 'Free Rotating Propeller Installed on Ship', Bul. MESJ, Vol 16, No 1, 1988. Ma H.-H., Zhang J.-H., 'Design of Stationary Vanes behind a Ducted Propeller and its Practical Use', CSSRC Rep. 88401, 1988. Muntjewerf J. J., 'Propulsion research by model testing', Jahrbuch der Schiffb., Vol 77, 1983. Muntjewerf J. J., Oosterveld M.W.C., 'Fuel Efficiency Through Hull Form and Propulsion Research - A Review of Recent MARIN Activities, SNAME STAR Symposium, 1987 Nakamura S. et. al., 'World's first contrarotating propeller system successfully fitted to a merchant ship', Motor Ship 11th Int'l Marine Propulsion Conf., 1989. Nakanishi M., Ikeda T., 'A Study on Performance of contrarotating Propellers', Trans. WJSNA, Vol 70, 1985. Nawrocki S., 'The Effect of Asymmetric Stern on Propulsion Efficiency from Model Test of a Bulk Carrier', 17th SMSSH, Varna, Vol. 1, 1988.
25
26
Nonnecke E. A., 'Schiff met treibstoffsparendem asymmetrischen Heck-Anwendugen und Erfahrungen', SuH, Vol 9, 1987. Osborne M. G., 'Improving the Propulsive Efficiency of Full Form Ships', Trans. IME, Vol 99, 5, 1987. Ouchi K., Tamashima M., Kawasaki T., Koizuka H., 'A Research and Development of PBCF(Propeller Boss Cap Fins)', J. SNAJ, Vol 165, pp. 43-45, 1989. Pashin V. M., Turbal V. K., 'Ways of Enhancing Propulsive Properties of Ships', Sudostrocnie, Vol 10, 1986. Punson Y., 'A new flow straightening device for ship propeller', 5th Nat'l Cong. on Theo. and Appl. Mech., Varna, 1985. Sasaki N. et. al., 'Propulsive Efficiency of Ship with Contrarotating Propellers', ISRP, Shanghai, 1989. Savikurki J., 'Aquamaster with contrarotating propellers', Hansa, Vol 12, 1988. Shpakov V. S., Voievodskaya E. N., Vasilkov E. K., 'Effectiveness of Co-axial Contra-Rotating Propellers in Ships with Various Power Plants', PRADS'89, 1989. Stierman E. J., 'Energy Saving Devices', MARIN Rep. 26, 1986. Szantyr J. A., Glover E. J., 'The analysis of unsteady propeller cavitation and hull surface pressures for ducted propellers', Trans. RINA, 1989. Takekuma et. al., 'Development of reaction fin as a device for improvement of perpulsive performance of high block coefficient ships', SNAJ, 1981. Πολίτης Γ.Κ., Λαμπρινίδης Γ.Ν. 'Η Υδροδυναμική της πρόωσης του πλοίου', Εκδόσεις Αστέρος, 1993. Πολίτης Γ.Κ., Λαμπρινίδης Γ.Ν., Αλατζατιανός Δ. 'Αναλυτική και Πειραματική Διερεύνηση της Σχεδίασης Συστήματος Ελικας και Υδρομύλου Ανάκτησης Ενέργειας', Τελική Εκθεση Ερευνητικού Προγράμματος που εκτελέστηκε στα πλαίσια του ΠΕΝΕΔ-1989.
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ
ΤΜΗΜΑ ΝΑΥΠΗΓΩΝ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ
ΜΑΘΗΜΑ: ΕΙΔΙΚΑ ΘΕΜΑΤΑ ΠΡΟΩΣΗΣ ΠΛΟΙΟΥ
ΠΡΟΩΣΗ ΜΕ ΑΝΑΔΡΑΣΗ - WATERJET PROPULSION
2η έκδοση - 2004
Γ. Κ. ΠΟΛΙΤΗ, Αναπληρωτή Καθηγητή
Την 1η έκδοση -2002- των σημειώσεων είχε επιμεληθεί ο κος Απόστολος Χρήστου
Σπουδαστής Ναυπηγός Μηχ. Μηχ.
ΑΘΗΝΑ, ΙΟΥΝΙΟΣ 2004
ΠΕΡΙΕΧΟΜΕΝΑ 1. Πρόλογος ............................................................................................................................ 3 2. Περιγραφή των τμημάτων ενός προωστήρα ανάδρασης – Ορισμοί ITTC ........................ 3 3. Αρχή λειτουργίας – φαινομενολογία της ροής σε ένα waterjet ......................................... 5 4. Ενεργειακές θεωρήσεις συστήματος πρόωσης με ανάδραση ............................................ 8
4.1. Συμβολισμοί ............................................................................................................... 8 4.2. Βασικές έννοιες σχετικά με τη ροή ενέργειας σε σύστημα πρόωσης με ανάδραση και σχέσεις για το βαθμό απόδοσης ....................................................................................... 9 4.3. Φαινόμενα που διαμορφώνουν το βαθμό απόδοσης του αγωγού ............................ 13 4.4. Σύγκριση της ιδανικής απόδοσης αγωγού waterjet με την αντίστοιχη ιδανική απόδοση συμβατικής έλικας ................................................................................................ 16 4.5. Βαθμός απόδοσης πτερωτής (αντλίας). .................................................................... 19
5. Πηδαλιουχία ..................................................................................................................... 22 6. Επιλογή και σχεδίαση ...................................................................................................... 23 7. Σύγκριση waterjet-έλικας ................................................................................................. 36
7.1. Ως προς τον βαθμό απόδοσης .................................................................................. 36 7.2. Ως προς τις ελικτικές ικανότητες ............................................................................. 36 7.3. Ως προς την εκμετάλλευση της ισχύος του κινητήρα στις διάφορες καταστάσεις λειτουργίας: .......................................................................................................................... 36 7.4. Ως προς τον θόρυβο: ................................................................................................ 36 7.5. Ως προς τα λοιπά χαρακτηριστικά: .......................................................................... 36 7.6. Συμπεράσματα .......................................................................................................... 37
8. Τεχνολογικό επίπεδο των waterjets .................................................................................. 37 9. Βιβλιογραφία .................................................................................................................... 41
2
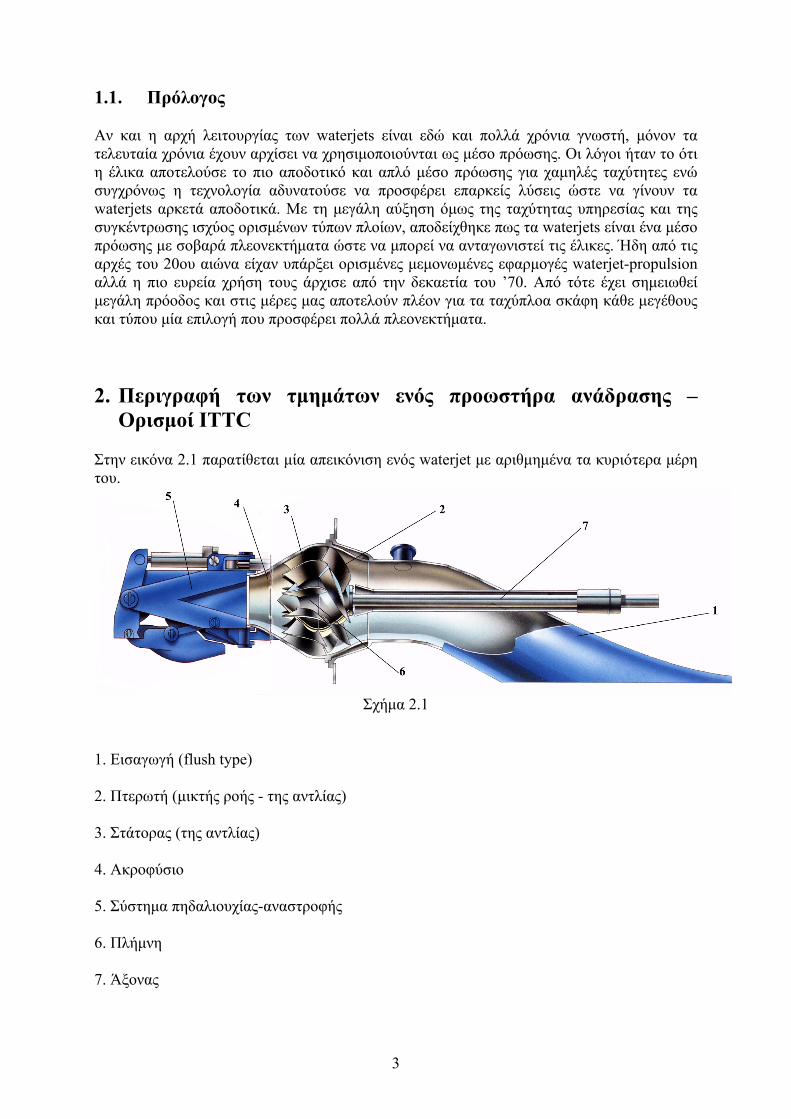
1.1. Πρόλογος Αν και η αρχή λειτουργίας των waterjets είναι εδώ και πολλά χρόνια γνωστή, μόνον τα τελευταία χρόνια έχουν αρχίσει να χρησιμοποιούνται ως μέσο πρόωσης. Οι λόγοι ήταν το ότι η έλικα αποτελούσε το πιο αποδοτικό και απλό μέσο πρόωσης για χαμηλές ταχύτητες ενώ συγχρόνως η τεχνολογία αδυνατούσε να προσφέρει επαρκείς λύσεις ώστε να γίνουν τα waterjets αρκετά αποδοτικά. Με τη μεγάλη αύξηση όμως της ταχύτητας υπηρεσίας και της συγκέντρωσης ισχύος ορισμένων τύπων πλοίων, αποδείχθηκε πως τα waterjets είναι ένα μέσο πρόωσης με σοβαρά πλεονεκτήματα ώστε να μπορεί να ανταγωνιστεί τις έλικες. Ήδη από τις αρχές του 20ου αιώνα είχαν υπάρξει ορισμένες μεμονωμένες εφαρμογές waterjet-propulsion αλλά η πιο ευρεία χρήση τους άρχισε από την δεκαετία του ’70. Από τότε έχει σημειωθεί μεγάλη πρόοδος και στις μέρες μας αποτελούν πλέον για τα ταχύπλοα σκάφη κάθε μεγέθους και τύπου μία επιλογή που προσφέρει πολλά πλεονεκτήματα. 2. Περιγραφή των τμημάτων ενός προωστήρα ανάδρασης – Ορισμοί ITTC
Στην εικόνα 2.1 παρατίθεται μία απεικόνιση ενός waterjet με αριθμημένα τα κυριότερα μέρη του.
Σχήμα 2.1
1. Εισαγωγή (flush type) 2. Πτερωτή (μικτής ροής - της αντλίας) 3. Στάτορας (της αντλίας) 4. Ακροφύσιο 5. Σύστημα πηδαλιουχίας-αναστροφής 6. Πλήμνη 7. Άξονας
3
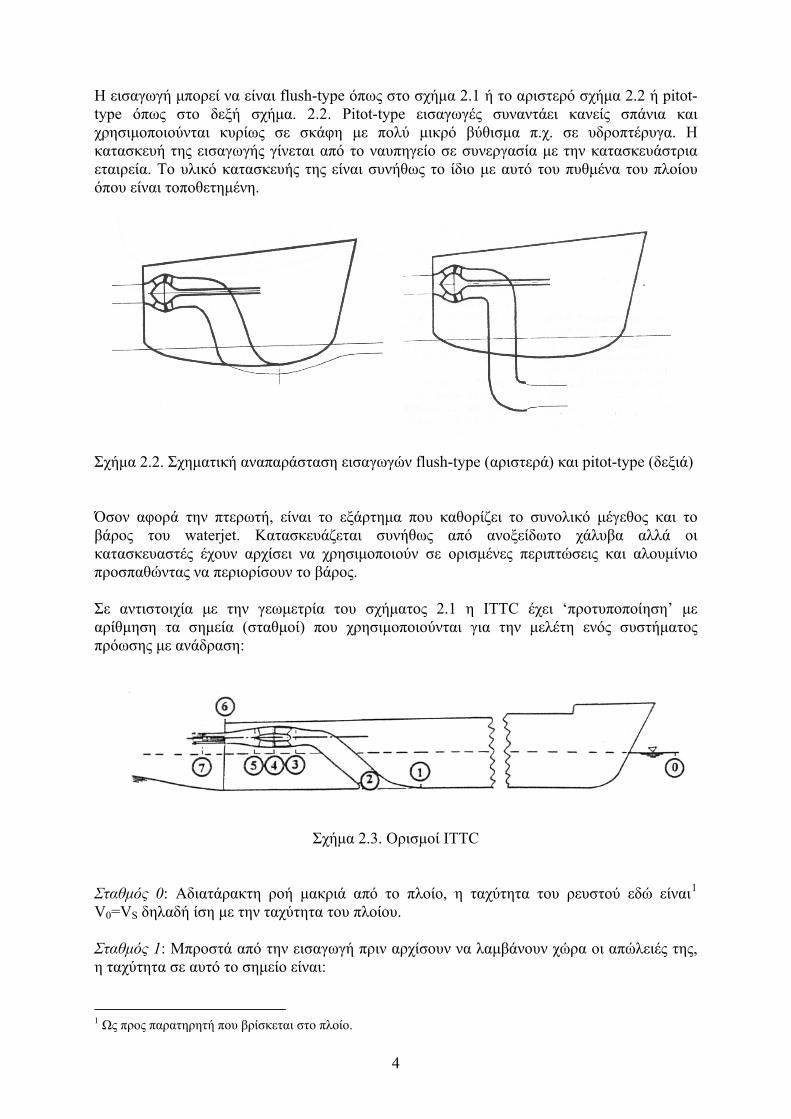
Η εισαγωγή μπορεί να είναι flush-type όπως στο σχήμα 2.1 ή το αριστερό σχήμα 2.2 ή pitot-type όπως στο δεξή σχήμα. 2.2. Pitot-type εισαγωγές συναντάει κανείς σπάνια και χρησιμοποιούνται κυρίως σε σκάφη με πολύ μικρό βύθισμα π.χ. σε υδροπτέρυγα. Η κατασκευή της εισαγωγής γίνεται από το ναυπηγείο σε συνεργασία με την κατασκευάστρια εταιρεία. Το υλικό κατασκευής της είναι συνήθως το ίδιο με αυτό του πυθμένα του πλοίου όπου είναι τοποθετημένη.
Σχήμα 2.2. Σχηματική αναπαράσταση εισαγωγών flush-type (αριστερά) και pitot-type (δεξιά) Όσον αφορά την πτερωτή, είναι το εξάρτημα που καθορίζει το συνολικό μέγεθος και το βάρος του waterjet. Κατασκευάζεται συνήθως από ανοξείδωτο χάλυβα αλλά οι κατασκευαστές έχουν αρχίσει να χρησιμοποιούν σε ορισμένες περιπτώσεις και αλουμίνιο προσπαθώντας να περιορίσουν το βάρος. Σε αντιστοιχία με την γεωμετρία του σχήματος 2.1 η ITTC έχει ‘προτυποποίηση’ με αρίθμηση τα σημεία (σταθμοί) που χρησιμοποιούνται για την μελέτη ενός συστήματος πρόωσης με ανάδραση:
Σχήμα 2.3. Ορισμοί ITTC
Σταθμός 0: Αδιατάρακτη ροή μακριά από το πλοίο, η ταχύτητα του ρευστού εδώ είναι1 V0=VS δηλαδή ίση με την ταχύτητα του πλοίου. Σταθμός 1: Μπροστά από την εισαγωγή πριν αρχίσουν να λαμβάνουν χώρα οι απώλειές της, η ταχύτητα σε αυτό το σημείο είναι:
1 Ως προς παρατηρητή που βρίσκεται στο πλοίο.
4

0 11 0
0
(1 ) V VV V w wV−
= − ⇔ = (2.1)
ορίζεται έτσι το ποσοστό ομόρρου w. Σταθμός 2: Αρχή του αγωγού της εισαγωγής, αμέσως μετά την είσοδό της. Η ταχύτητα του ρευστού εδώ είναι:
22 0
0
VV IVR V IVRV
ορισμος
= ⋅ ⇔ = (2.2)
ορίζεται έτσι ο λόγος ταχύτητας εισαγωγής IVR (inlet velocity ratio). Σταθμός 3: Ακριβώς πριν την πτερωτή. Σταθμός 4: Ανάμεσα στην πτερωτή και τον στάτορα. Σταθμός 5: Αμέσως μετά τον στάτορα. Παρατηρήστε ότι η αντλία του waterjet βρίσκεται μεταξύ των σταθμών 3 και 5. Σταθμός 6: Έξοδος ακροφυσίου. Σταθμός 7: Σημείο όπου η δέσμη του νερού (jet) αποκτά πίεση ίση της ατμοσφαιρικής. Η ταχύτητα του ρευστού εδώ είναι:
77 0
0
VV JVR V JVRV
ορισμος
= ⋅ ⇔ = (2.3)
ορίζεται έτσι ο λόγος ταχύτητας ακροφυσίου JVR (jet velocity ratio). Ορίζεται επίσης και ο συντελεστής μ αντίστροφος του JVR από τη σχέση:
1 0
7
VJVRV
ορισμος
μ −= = (2.4)
Τις περισσότερες φορές ο σταθμός 6 συμπίπτει με τον 7 γιατί τα ακροφύσια συνήθως έχουν παράλληλα τοιχώματα στην έξοδο. Να σημειωθεί ότι οι (μέσες) ταχύτητες στις διάφορες θέσεις συμβολίζονται με Vj, j=1…7. Στα επόμενα οι δείκτες ‘σταθμού’ που εισήχθησαν ανωτέρω θα χρησιμοποιούνται και για κάθε άλλο μέγεθος που θα χρειαστεί να οριστεί. 3. Αρχή λειτουργίας – φαινομενολογία της ροής σε ένα waterjet Ο τρόπος λειτουργίας των waterjets είναι ο ακόλουθος: Θαλασσινό νερό αναρροφάται μέσω της εισαγωγής από το κάτω μέρος του πλοίου, και αυξάνεται η ολική ενέργειά του από την πτερωτή. H αύξηση της ενέργειας επιτυγχάνεται τόσο με δημιουργία απότομης αύξησης της πίεσης (pressure jump) στην περιοχή εισόδου-εξόδου της πτερωτής όσο και με απόδοση περιστροφικής αδράνειας από την πτερωτή στο νερό. Στη συνέχεια δρα ο στάτορας ευθυγραμμίζοντας (κατά το δυνατό) την ροή που έρχεται από την πτερωτή και μεταρέποντας την περιστροφική αδράνεια (angular momentum) του νερού σε επί πλέον ώση (επί πλέον αύξηση του pressure jump). Το ακροφύσιο μετατρέπει τη πίεση σε κινητική ενέργεια προσπαθώντας να εξασφαλίσει ‘ομαλή’ έξοδο του νερού από το σύστημα, δηλαδή έξοδο σε συνθήκες πίεσης που να πλησιάζουν την ατμοσφαιρική. Το ακροφύσιο βρίσκεται πάνω από την ίσαλο πλεύσης του πλοίου. Παρατηρήστε ότι η γεωμετρική διαμόρφωση του αγωγού του waterjet σε αλληλεπίδραση με την πτερωτή και τον στάτορα οδηγεί σε μία ιδιαίτερα
5
περίπλοκη κατανομή πίεσης στα τοιχώματά του, η οποία τελικά διαμορφώνει τμήμα της αναπτυσσόμενης τελικής ώσης του συστήματος. Εάν με Tshaft συμβολίσουμε το τμήμα της παραγόμενης ώσης από την πτερωτή της αντλίας (μεταδίδεται στο πλοίο μέσω του εδράνου ώσης του άξονα της μηχανής) και με Tduct το τμήμα της παραγόμενης ώσης από τον στάτορα και την κατανομή πίεσης στα τοιχώματα του αγωγού (μεταδίδεται στο πλοίο μέσω της στήριξης του σώματος του αγωγού), τότε η συνολική ώση που αναπτύσσει το waterjet είναι:
shaft ductT T T= + (3.1) Αν με RB συμβολίσουμε την αντίσταση του πλοίου με το waterjet σε λειτουργία, και για σταθερή ταχύτητα κίνησης του πλοίου, ισχύει η ακόλουθη σχέση ισορροπίας:
B shaft ductR T T T= = + (3.2) Ένα πολύ βασικό σημείο για την κατανόηση της λειτουργίας του waterjet είναι η κατανόηση των φαινομένων ροής που συμβαίνουν στη εισαγωγή. Στην περιοχή αυτή η ροή διαμορφώνεται τόσο από τη δράση της αντλίας του waterjet η οποία ‘αναρροφά’ το νερό δημιουργώντας, για παρατηρητή που κοιτά τη γάστρα από έξω, την αίσθηση ύπαρξης ‘καταβόθρας’ της ροής, όσο και από το οριακό στρώμα που αναπτύσσεται στην επιφάνεια της γάστρας λόγω κίνησής της με κάποια ταχύτητα 0SV ≠ . Στο σχήμα 3.1 που ακολουθεί φαίνεται η ‘τοπολογία’ των γραμμών ροής στη εισαγωγή τύπου flash ενός waterjet. Το αριστερό σχήμα παρουσιάζει την εικόνα των γραμμών ροής για μηδενική ταχύτητα πλοίου VS=0. Το μεσαίο σχήμα παρουσιάζει την εικόνα των γραμμών ροής για μια ενδιάμεση ταχύτητα πλοίου VS<Vmax. Τέλος το δεξή σχήμα παρουσιάζει την εικόνα των γραμμών ροής για την μέγιστη ταχύτητα πλοίου Vmax. Στο σχήμα φαίνεται τόσο η κάτοψη των γραμμών ροής όσο και η πλαγία όψη. Όπως φαίνεται στο σχήμα 3.1 για μηδενική ταχύτητα πλοίου οι γραμμές ροής παρουσιάζουν κάποιου είδους συμμετρία γύρω από την εισαγωγή. Ο λόγος είναι ότι στην περίπτωση αυτή δεν υπάρχει οριακό στρώμα λόγω ταχύτητας πλοίου. Η εισαγωγή δρα ως σημείο ‘καταβόθρας’ και δημιουργεί ένα περίπου συμμετρικό οριακό στρώμα γύρω της. Καθώς η ταχύτητα του πλοίου αυξάνεται η ροή που θα δημιουργηθεί μπορεί να θεωρηθεί σαν υπέρθεση του οριακού στρώματος της ‘καταβόθρας’ με το οριακό στρώμα επίπεδης πλάκας σε παράλληλη ροή. Το αποτέλεσμα φαίνεται στο μεσαίο και αριστερό σχήμα 3.1. Όπως φαίνεται καθώς μεγαλώνει η VS η περιοχή ροής αριστερά της εισαγωγής αποκτά ταχύτητες κατά τη διεύθυνση της VS αλλά μικρότερες από τη VS. Δημιουργείται επίσης ένας οριακός σωλήνας ροής από την εικονική προέκταση του αριστερού τμήματος του χείλους της εισαγωγής. Ολόκληρη η παροχή της εισαγωγής προέρχεται στην περίπτωση αυτή από το οριακό στρώμα ανάντη της ροής. Συγκρίνοντας το μεσαίο με το δεξή σχήμα 3.1 παρατηρήστε ότι, καθώς μεγαλώνει η ταχύτητα του πλοίου, ο προαναφερθείς οριακός σωλήνας ροής ‘συρρικνώνεται’ τόσο στην κάτοψη όσο και στην πλάγια όψη του (όπως αναμενόταν – για την ίδια παροχή απαιτείται μικρότερο εμβαδόν διατομής αφού μεγαλώνει η ταχύτητα). Είναι τέλος φανερό ότι η ύπαρξη οριακού στρώματος στον πυθμένα του πλοίου προκαλεί μείωση της ταχύτητας του νερού (σε σχέση με την ταχύτητα του πλοίου) που αναρροφάται από την εισαγωγή του waterjet. Η μείωση αυτή περιγράφεται ποσοτικά από το ποσοστό ομόρρου w, σχέση 2.1. Το ποσοστό ομόρου w εξαρτάται σημαντικά από την ταχύτητα του πλοίου και δεν έχει νόημα για VS=0. Στο σχήμα 3.1 φαίνεται επίσης για τις διάφορες καταστάσεις ταχύτητας και ο αδιάστατος συντελεστής IVR (inlet velocity ratio) ο οποίος έχει οριστεί από τη σχέση 2.2. Το IVR είναι σημαντικό μέγεθος για την λειτουργία της εισαγωγής και όλου του waterjet γιατί έχει άμεση σχέση με τις απώλειες στην περιοχή αυτή. Οι συνήθεις τιμές του IVR στο σημείο σχεδίασης (δηλ. στην ταχύτητα υπηρεσίας του πλοίου) είναι της τάξης του 0.65-0.85.
6
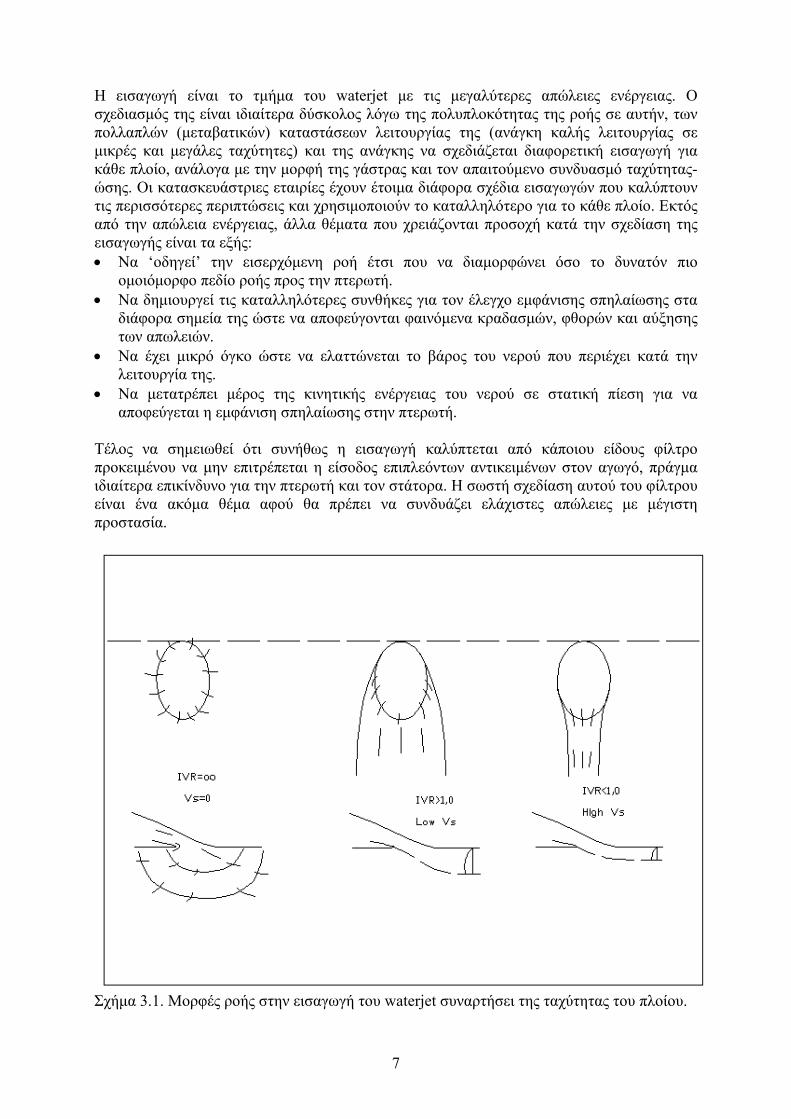
Η εισαγωγή είναι το τμήμα του waterjet με τις μεγαλύτερες απώλειες ενέργειας. Ο σχεδιασμός της είναι ιδιαίτερα δύσκολος λόγω της πολυπλοκότητας της ροής σε αυτήν, των πολλαπλών (μεταβατικών) καταστάσεων λειτουργίας της (ανάγκη καλής λειτουργίας σε μικρές και μεγάλες ταχύτητες) και της ανάγκης να σχεδιάζεται διαφορετική εισαγωγή για κάθε πλοίο, ανάλογα με την μορφή της γάστρας και τον απαιτούμενο συνδυασμό ταχύτητας-ώσης. Οι κατασκευάστριες εταιρίες έχουν έτοιμα διάφορα σχέδια εισαγωγών που καλύπτουν τις περισσότερες περιπτώσεις και χρησιμοποιούν το καταλληλότερο για το κάθε πλοίο. Εκτός από την απώλεια ενέργειας, άλλα θέματα που χρειάζονται προσοχή κατά την σχεδίαση της εισαγωγής είναι τα εξής: • Να ‘οδηγεί’ την εισερχόμενη ροή έτσι που να διαμορφώνει όσο το δυνατόν πιο
ομοιόμορφο πεδίο ροής προς την πτερωτή. • Να δημιουργεί τις καταλληλότερες συνθήκες για τον έλεγχο εμφάνισης σπηλαίωσης στα
διάφορα σημεία της ώστε να αποφεύγονται φαινόμενα κραδασμών, φθορών και αύξησης των απωλειών.
• Να έχει μικρό όγκο ώστε να ελαττώνεται το βάρος του νερού που περιέχει κατά την λειτουργία της.
• Να μετατρέπει μέρος της κινητικής ενέργειας του νερού σε στατική πίεση για να αποφεύγεται η εμφάνιση σπηλαίωσης στην πτερωτή.
Τέλος να σημειωθεί ότι συνήθως η εισαγωγή καλύπτεται από κάποιου είδους φίλτρο προκειμένου να μην επιτρέπεται η είσοδος επιπλεόντων αντικειμένων στον αγωγό, πράγμα ιδιαίτερα επικίνδυνο για την πτερωτή και τον στάτορα. Η σωστή σχεδίαση αυτού του φίλτρου είναι ένα ακόμα θέμα αφού θα πρέπει να συνδυάζει ελάχιστες απώλειες με μέγιστη προστασία.
Σχήμα 3.1. Μορφές ροής στην εισαγωγή του waterjet συναρτήσει της ταχύτητας του πλοίου.
7

4. Ενεργειακές θεωρήσεις συστήματος πρόωσης με ανάδραση 4.1. Συμβολισμοί
Παρατηρώντας την εξίσωση του Bernoulli για μόνιμη ροή 212
V p gz Cρ ρ+ + = υπάρχουν
τρεις όροι:
• Ο όρος 212
Vρ που φανερώνει την κινητική ενέργεια ανά μονάδα όγκου του ρευστού
• Ο όρος p (πίεση) που φανερώνει την ενέργεια εντατικής κατάστασης ανά μονάδα όγκου του ρευστού και
• Ο όρος ghρ που φανερώνει την δυναμική ενέργεια λόγω εξωτερικού πεδίου (βαρύτητας) ανά μονάδα όγκου του ρευστού
Διαιρώντας με την πυκνότητα του ρευστού ρ (ισοδύναμα πολ/ζοντας με τον όγκο και διαιρώντας με τη μάζα) παράγονται τα αντίστοιχα με τα ανωτέρω μεγέθη που συμβολίζουν ενέργεια ανά μονάδα μάζας, δηλαδή:
• Ο όρος 212
V φανερώνει την κινητική ενέργεια ανά μονάδα μάζας του ρευστού
• Ο όρος pρ
φανερώνει την ενέργεια εντατικής κατάστασης ανά μονάδα μάζας του ρευστού
και • Ο όρος gh που φανερώνει την δυναμική ενέργεια λόγω εξωτερικού πεδίου (βαρύτητας)
ανά μονάδα μάζας του ρευστού Διαιρώντας περαιτέρω τα ανωτέρω μεγέθη με την επιτάχυνση της βαρύτητας g, παράγονται αντίστοιχα μεγέθη που συμβολίζουν το ενεργειακό περιεχόμενο ανά μονάδα μάζας ανοιγμένο σε «ύψος» (head) – όρος που χρησιμοποιείται ιδιαίτερα στις αντλίες - δηλαδή:
• Ο όρος 21
2Vg
φανερώνει το ‘ύψος’ που αντιστοιχεί στην κινητική ενέργεια ανά μονάδα
μάζας του ρευστού
• Ο όρος pgρ
φανερώνει το ‘ύψος’ που αντιστοιχεί στην ενέργεια εντατικής κατάστασης
ανά μονάδα μάζας του ρευστού και • Ο όρος h που φανερώνει την δυναμική ενέργεια εξωτερικού πεδίου (βαρύτητας) ανά
μονάδα μάζας του ρευστού εκφρασμένη ως ύψος (ή υψομετρική διαφορά)
Στις σχέσεις που ακολουθούν η ενέργεια ανά μονάδα μάζας (κινητική 21
2Vg
, εντατικής
κατάστασης pρ
ή δυναμική εξωτερικού πεδίου ) συμβολίζεται με , όπου ο δείκτης j
ακολουθεί τον ορισμό της ITTC, σχήμα 2.3.
gh jE
Το ‘ύψος’ (Head) (κινητικής ενέργειας, ενέργειας εντατικής κατάστασης ή δυναμικής ενέργειας εξωτερικού πεδίου) συμβολίζεται με jH
8

Άλλα μεγέθη που εμφανίζονται στις σχέσεις που ακολουθούν είναι: • jA : επιφάνεια στον σταθμό j ( 2m ) • jh : ύψος από την ίσαλο στον σταθμό j (m) • jV : μέση ταχύτητα στον σταθμό j (m/s) • Q : παροχή όγκου (m3/s), δεν χρειάζεται δείκτη αφού είναι σταθερή σε όλο το μήκος του
αγωγού του waterjet – διατήρηση συνέχειας. • m : παροχή μάζας (kg/s), δεν χρειάζεται δείκτη αφού είναι σταθερή σε όλο το μήκος του
αγωγού του waterjet – διατήρηση συνέχειας - ισχύει: j jm Q A Vρ ρ= = , για κάθε j (4.1)
• jM : ρυθμός μεταβολής της ορμής (impulse= change of momentum) στον σταθμό j (Newton), ισχύει:
j jM mV= (4.2) Υπενθυμίζουμε επίσης τον νόμο του Νεύτωνα σύμφωνα με τον οποίο:
(Fdt d mV )= (4.3) 4.2. Βασικές έννοιες σχετικά με τη ροή ενέργειας σε σύστημα πρόωσης με
ανάδραση και σχέσεις για το βαθμό απόδοσης2 Εφαρμόζοντας την σχέση (4.3) για όγκο ελέγχου που περιλαμβάνει τους σταθμούς 1 και 7, σχήμα 2.3, έχομε:
7 17
( )( ) d mV mVd mVTdt dt 1mV mV−
= = = − ή (4.4)
7T M M1= − (4.5) όπου με Τ συμβολίζουμε την ώση που αναπτύσσει το waterjet, σχέση 3.1. Η ωφέλιμη ισχύς PT από την αυτοπρόωση του πλοίου δίνεται από τη σχέση:
0 4.4
0 0 7 1(sV V
T SP TV TV V m V V=
= = = − ) (4.6) Ενώ η ισχύς ώσης, κατ’ αντιστοιχία με την έλικα, ορίζεται από τη σχέση:
1THP TV= (4.7)
2 Η ανάλυση της ροής της ενέργειας σε ένα waterjet που περιέχεται σε αυτή την παράγραφο είναι ‘σύνθεση΄ από διάφορες πηγές της βιβλιογραφίας που συλλέχτηκαν στα πλαίσια της Διπλωματικής Εργασίας του σπουδαστή Α. Χρήστου. Να σημειωθεί ότι η ενεργειακή ανάλυση του waterjet μπορεί να βρεθεί σε διάφορες παραλλαγές δεδομένου ότι πολλά από τα σχετικά θέματα δεν είναι ακόμα κατασταλαγμένα ερευνητικά.
9
Αν με συμβολίσουμε την ισχύ34P 3 πού η πτερωτή της αντλίας αποδίδει στον αγωγό του waterjet, σχήμα 4.3, ο βαθμός απόδοσης του αγωγού nduct ορίζεται ώς:
34duct
THPnP
ορισμος
= (4.8)
Έστω DIP η ισχύς που αποδίδεται από τον κινητήρα του πλοίου στον άξονα της αντλίας - μετά τον μειωτήρα και τα πιθανά έδρανα - (Delivered -Impeller). Ορίζεται τότε ο βαθμός απόδοσης πτερωτής στην πραγματική κατάσταση αυτοπροωθούμενου πλοίου από τη σχέση: impn
34imp
DI
PnP
= (4.9)
Ο συνολικός βαθμός απόδοσης του waterjet προκύπτει σαν συνδυασμός τού βαθμού απόδοσης του αγωγού με τον βαθμό απόδοσης πτερωτής:
34
34wj duct imp
DI DI
PTHP THPnP P P
ορισμος
= = = n n (4.10)
Η πραγματική κατάσταση του αυτοπροωθούμενου πλοίου δεν είναι ποτέ επακριβώς γνωστή. Στην πραγματικότητα ο υπολογισμός του βαθμού απόδοσης πτερωτής γίνεται σε μία κατάσταση δοκιμών συνήθως σε σήραγγα σπηλαίωσης. Αν συμβολίσουμε με τον βαθμό απόδοσης πτερωτής στην ιδανική αυτή κατάσταση, τότε ορίζεται ένας βαθμός απόδοσης εγκατάστασης αντλίας από τη σχέση:
impn
imp idealn −
instn
impinst
imp ideal
nn
n −
= (4.11)
οπότε:
imp inst imp idealn n n −= (4.12) Πιθανές τιμές του είναι μεταξύ 0.96 και 0.99 ενώ αναμενόμενες (από εμπειρία) τιμές του
είναι μεταξύ 0.8 και 0.9. instn
imp idealn −
Αντικαθιστώντας την σχέση 4.12 στη σχέση 4.10 προκύπτει η ακόλουθη σχέση για το βαθμό απόδοσης του waterjet:
wj duct inst imp idealn n n n −= (4.13) Η αλληλεπίδραση waterjet-πλοίου έχει ως αποτέλεσμα η αντίσταση ρυμούλκησης R (πλοίο χωρίς προωστήρα) να διαφέρει από την ώση Τ που απαιτείται κατά την πρόωση με το waterjet εγκατεστημένο (αυτοπροωθούμενο πλοίο). Το θέμα αυτό είναι ιδιαίτερα πολύπλοκο αφού στην αλληλεπίδραση πρέπει να ληφθεί υπόψη η αλλαγή της ροής στη γάστρα στην περιοχή της εισαγωγής (και εξαγωγής) και είναι ακόμα αντικείμενο έρευνας και διαφωνιών.
3 Η ισχύς αυτή μεταδίδεται τόσο υπό μορφή pressure jump όσο και υπό μορφή γωνιακής ορμής στην περιοχή μεταξύ των σταθμών 3 και 4 από την πτερωτή στο νερό.
10
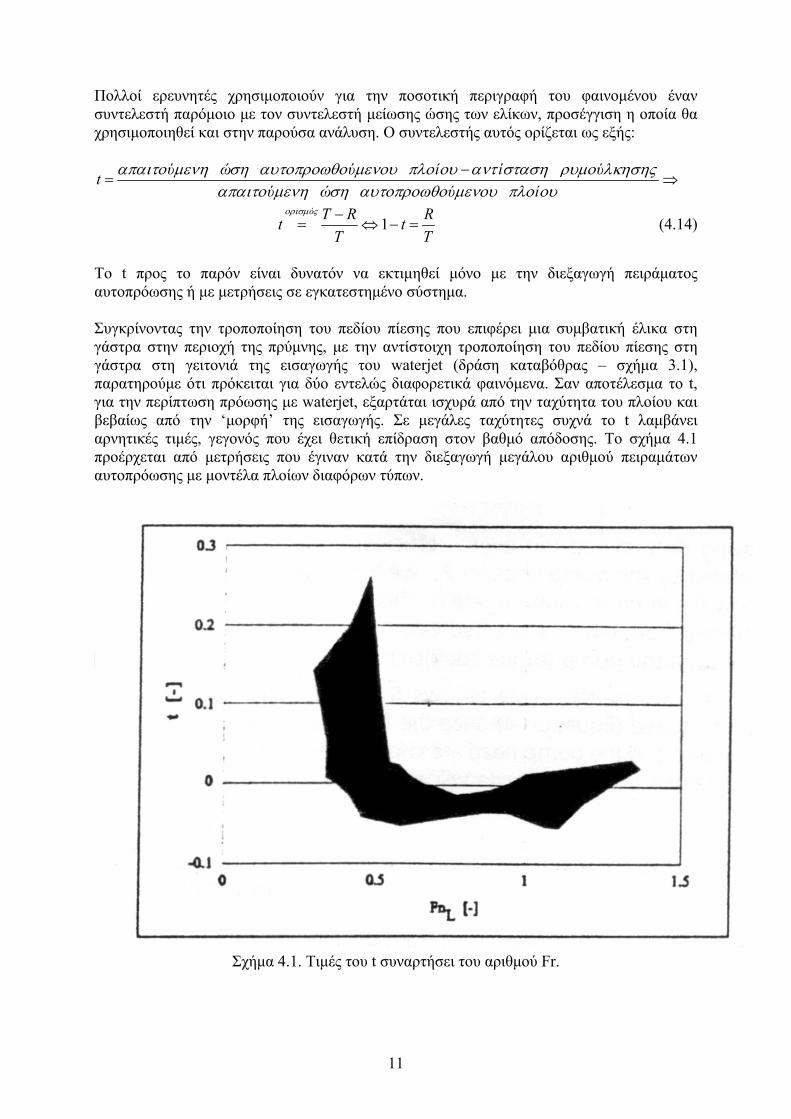
Πολλοί ερευνητές χρησιμοποιούν για την ποσοτική περιγραφή του φαινομένου έναν συντελεστή παρόμοιο με τον συντελεστή μείωσης ώσης των ελίκων, προσέγγιση η οποία θα χρησιμοποιηθεί και στην παρούσα ανάλυση. Ο συντελεστής αυτός ορίζεται ως εξής:
ύ ώ ύ ί ί ύtύ ώ ύ ί
απαιτο μενη ση αυτοπροωθο μενου πλο ου αντ σταση ρυμο λκησηςαπαιτο μενη ση αυτοπροωθο μενου πλο ου
−= ⇒
1ό T R Rt
T T
ορισμ ς
t−= ⇔ − = (4.14)
Το t προς το παρόν είναι δυνατόν να εκτιμηθεί μόνο με την διεξαγωγή πειράματος αυτοπρόωσης ή με μετρήσεις σε εγκατεστημένο σύστημα. Συγκρίνοντας την τροποποίηση του πεδίου πίεσης που επιφέρει μια συμβατική έλικα στη γάστρα στην περιοχή της πρύμνης, με την αντίστοιχη τροποποίηση του πεδίου πίεσης στη γάστρα στη γειτονιά της εισαγωγής του waterjet (δράση καταβόθρας – σχήμα 3.1), παρατηρούμε ότι πρόκειται για δύο εντελώς διαφορετικά φαινόμενα. Σαν αποτέλεσμα το t, για την περίπτωση πρόωσης με waterjet, εξαρτάται ισχυρά από την ταχύτητα του πλοίου και βεβαίως από την ‘μορφή’ της εισαγωγής. Σε μεγάλες ταχύτητες συχνά το t λαμβάνει αρνητικές τιμές, γεγονός που έχει θετική επίδραση στον βαθμό απόδοσης. Το σχήμα 4.1 προέρχεται από μετρήσεις που έγιναν κατά την διεξαγωγή μεγάλου αριθμού πειραμάτων αυτοπρόωσης με μοντέλα πλοίων διαφόρων τύπων.
Σχήμα 4.1. Τιμές του t συναρτήσει του αριθμού Fr.
11
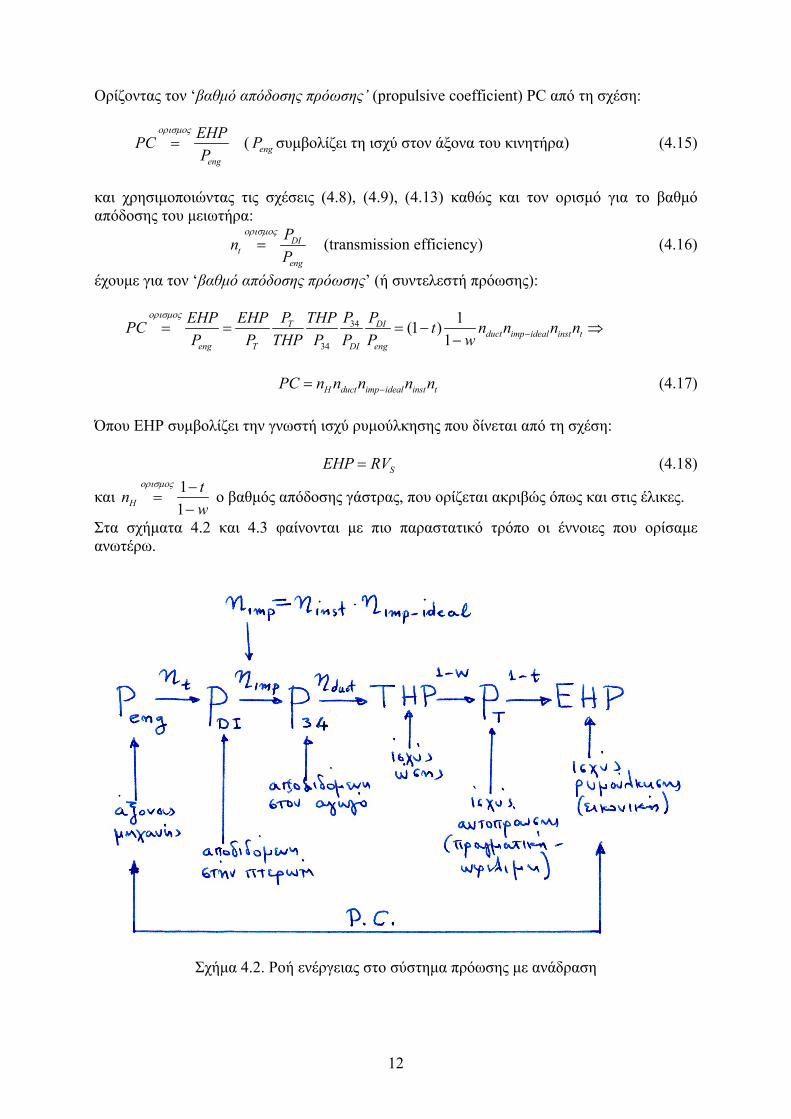
Ορίζοντας τον ‘βαθμό απόδοσης πρόωσης’ (propulsive coefficient) PC από τη σχέση:
eng
EHPPCP
ορισμος
= ( συμβολίζει τη ισχύ στον άξονα του κινητήρα) (4.15) engP
και χρησιμοποιώντας τις σχέσεις (4.8), (4.9), (4.13) καθώς και τον ορισμό για το βαθμό απόδοσης του μειωτήρα:
DIt
eng
PnP
ορισμος
= (transmission efficiency) (4.16)
έχουμε για τον ‘βαθμό απόδοσης πρόωσης’ (ή συντελεστή πρόωσης):
34
34
1(1 )1
T DIduct imp ideal inst t
eng T DI eng
PP PEHP EHP THPPC t n n n nP P THP P P P w
ορισμος
−= = = −−
⇒
H duct imp ideal inst tPC n n n n n−= (4.17)
Όπου EHP συμβολίζει την γνωστή ισχύ ρυμούλκησης που δίνεται από τη σχέση:
SEHP RV= (4.18)
και 11H
tnw
ορισμος −=
− ο βαθμός απόδοσης γάστρας, που ορίζεται ακριβώς όπως και στις έλικες.
Στα σχήματα 4.2 και 4.3 φαίνονται με πιο παραστατικό τρόπο οι έννοιες που ορίσαμε ανωτέρω.
Σχήμα 4.2. Ροή ενέργειας στο σύστημα πρόωσης με ανάδραση
12
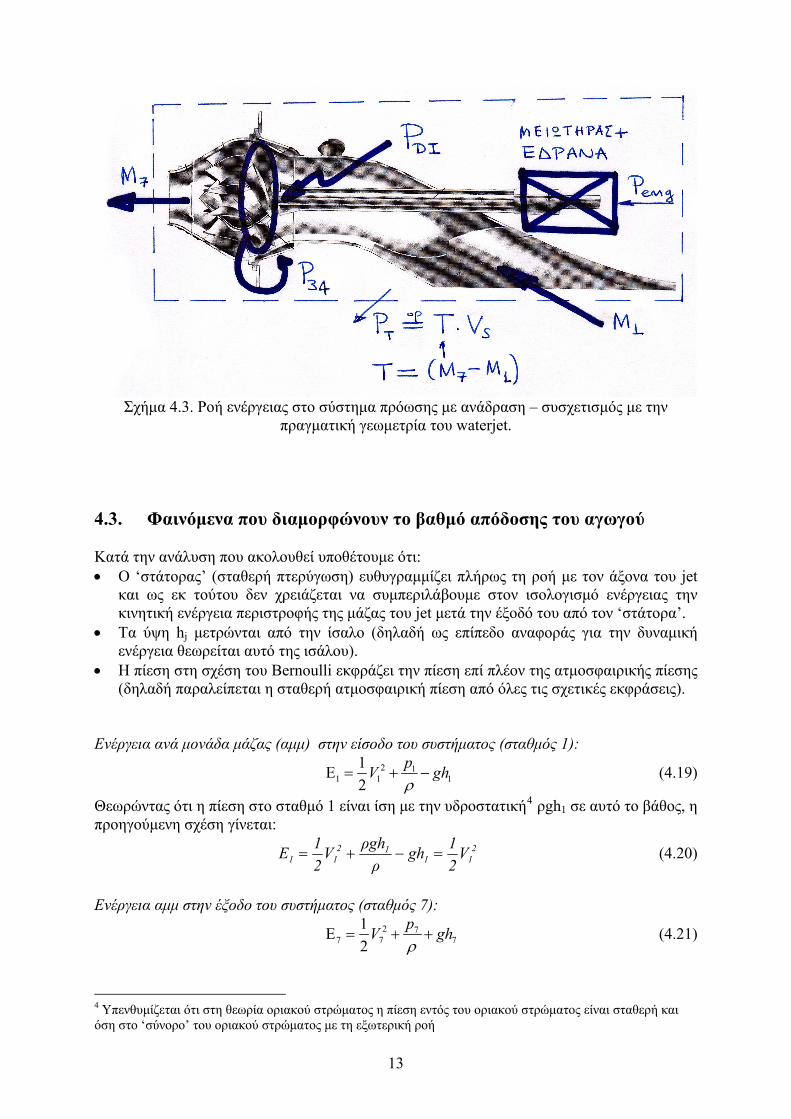
Σχήμα 4.3. Ροή ενέργειας στο σύστημα πρόωσης με ανάδραση – συσχετισμός με την
πραγματική γεωμετρία του waterjet.
4.3. Φαινόμενα που διαμορφώνουν το βαθμό απόδοσης του αγωγού Κατά την ανάλυση που ακολουθεί υποθέτουμε ότι: • Ο ‘στάτορας’ (σταθερή πτερύγωση) ευθυγραμμίζει πλήρως τη ροή με τον άξονα του jet
και ως εκ τούτου δεν χρειάζεται να συμπεριλάβουμε στον ισολογισμό ενέργειας την κινητική ενέργεια περιστροφής της μάζας του jet μετά την έξοδό του από τον ‘στάτορα’.
• Τα ύψη hj μετρώνται από την ίσαλο (δηλαδή ως επίπεδο αναφοράς για την δυναμική ενέργεια θεωρείται αυτό της ισάλου).
• Η πίεση στη σχέση του Bernoulli εκφράζει την πίεση επί πλέον της ατμοσφαιρικής πίεσης (δηλαδή παραλείπεται η σταθερή ατμοσφαιρική πίεση από όλες τις σχετικές εκφράσεις).
Ενέργεια ανά μονάδα μάζας (αμμ) στην είσοδο του συστήματος (σταθμός 1):
2 11 1
12
pVρ
Ε = + − 1gh (4.19)
Θεωρώντας ότι η πίεση στο σταθμό 1 είναι ίση με την υδροστατική4 ρgh1 σε αυτό το βάθος, η προηγούμενη σχέση γίνεται:
211
1211 V
21gh
ρghρV
21Ε =−+= (4.20)
Ενέργεια αμμ στην έξοδο του συστήματος (σταθμός 7):
2 77 7 7
12
pV ghρ
Ε = + +
(4.21)
4 Υπενθυμίζεται ότι στη θεωρία οριακού στρώματος η πίεση εντός του οριακού στρώματος είναι σταθερή και όση στο ‘σύνορο’ του οριακού στρώματος με τη εξωτερική ροή
13

Θεωρώντας ότι η πίεση στο σταθμό 7 είναι ίση με την ατμοσφαιρική (καθότι και από τον ορισμό είναι το σημείο όπου η εξερχόμενη από το ακροφύσιο δέσμη νερού αποκτά πίεση ίση της ατμοσφαιρικής), θα πρέπει p7=0, οπότε η προηγούμενη σχέση γίνεται:
72
77 ghV21Ε += (4.22)
Ο ισολογισμός ενέργειας αμμ στον αγωγό δίνεται από την ακόλουθη σχέση:
1 7 1 3( ) ( ) LOSS LOSSό ό E E E 5 7εισερχ μενη εξερχ μενη →Ε = Ε ⇒ Ε + ΔΕ = + + → (4.23) όπου: • ΔΕ είναι η ενέργεια αμμ που δίδεται από την πτερωτή στο νερό. Η ενέργεια αυτή
συνδέεται με την ισχύ που η πτερωτή αποδίδει στον αγωγό P34 (προηγούμενη παράγραφος) με τη σχέση:
34P m= ΔΕ (4.24) • → είναι οι απώλειες στην εισαγωγή και το ακροφύσιο αντίστοιχα, που
οφείλονται στην ιδιαίτερα πολύπλοκη τρισδιάστατη συνεκτική ροή με σπηλαίωση που συμβαίνει μέσα σε έναν αγωγό και η οποία έχει αμεληθεί στη απλοποιημένη θεώρηση που γίνεται εδώ.
1 3 5 7,LOSS LOSSE E→
Λύνοντας τη σχέση 4.23 ως προς ΔΕ λαμβάνουμε:
(4.23) 2 27 7 1 1 3 5 7
1 12 2 LOSS LOSSV gh V E E→ →⎡ ⎤ ⎡ ⎤⇒ ΔΕ = + − + + ⇒⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
(4.25)
2 2
7 1 1 3 5 71 ( )2 LOSS LOSSV V E E gh→ →ΔΕ = − + + + 7
→
(4.26)
Ακολουθώντας την πρακτική που έχει αναπτυχθεί από προγενέστερους ερευνητές στο θέμα της ποσοτικής περιγραφής των απωλειών εισάγουμε τους ακολούθους αδιάστατους συντελεστές απωλειών:
1 3 5 7,LOSS LOSSE E→
1 313
1
LOSSζ →Ε=
Ε (4.27)
και:
5 757
7
LOSS
κιν
ζ →
−
Ε=
Ε (4.28)
όπου με συμβολίζουμε εξ ορισμού το: 7 κιν−Ε
27
12
Vκιν−Ε = 7 (4.29)
Αντικαθιστώντας τις σχέσεις (4.27) και (4.28) στην σχέση (4.26) έχουμε:
14

2 2 2 2 2 27 1 1 3 5 7 7 7 1 13 1 57 7 7
1 1 1 1 1 12 2 2 2 2 2LOSS LOSSV V E E gh V V V V ghζ ζ→ →ΔΕ = − + + + = − − + + ⇒
2 257 7 13 1 7
1 1(1 ) (1 )2 2
V Vζ ζΔΕ = + − − + gh (4.30)
Αντικαθιστώντας τη σχέση 4.30 στη σχέση 4.24 παίρνουμε: 2 2
34 57 7 13 1 71 1[(1 ) (1 ) ]2 2
P m V V mgζ ζ= + − − + h (4.31)
Ο δε βαθμός απόδοσης του αγωγού (του waterjet), σχέση 4.8, παίρνει την μορφή:
7 1 11
2 234 57 7 13 1 7
( )1/ 2m[(1 )V (1 )V ]duct
m V V VTVnP mζ ζ gh
−= =
+ − − + (4.32)
Παραδοσιακά ορίζεται (όπως και στις έλικες όταν αντιμετωπίζονται με τη θεωρία ορμής) ένας θεωρητικός (ιδανικός) βαθμός απόδοσης του αγωγού. Ο ιδανικός αυτός βαθμός απόδοσης προκύπτει κάνοντας της εξής παραδοχές: • Δεν υπάρχουν απώλειες στα διάφορα μέρη του αγωγού:
1 3 5 7 13 570, 0 0, 0LOSS LOSSE E ζ ζ→ →= = ⇒ = = (4.33) • Το ακροφύσιο βρίσκεται στο ύψος της ισάλου (h7=0). • Η σταθερή πτερύγωση ευθυγραμμίζει πλήρως την ροή. • Το ποσοστό ομόρρου είναι μηδέν (w=0) οπότε V1=V0. Λαμβάνοντας υπ’ όψιν τις παραπάνω παραδοχές η σχέση (4.32) γίνεται:
0 1 07 1 12 2
7 1
( )1/ 2 ( )
w V Vduct ideal
m V V Vnm V V
= ⇒ =−
−= ⎯⎯⎯⎯⎯→
−0
7 0
2duct ideal
VnV V− =
+ (4.34)
Αλλά 7
0
VJVRV
= και ο β.α. του αγωγού παίρνει τη μορφή:
21duct idealn
JVR− =+
(4.35)
ή συναρτήσει του μ=JVR-1, σχέση 2.4:
0
7
7 0
7 7
22
1duct ideal
VVn V V
V V
μμ− = =
++ (4.36)
Θα εισάγουμε ακολούθως τον ‘συντελεστή φόρτισης’ CT του συστήματος πρόωσης με waterjet (thrust loading coefficient), με τρόπο αντίστοιχο αυτού που χρησιμοποιείται στις έλικες, και θα προσπαθήσουμε να συσχετίσουμε τον ‘ιδανικό βαθμό απόδοσης’ του αγωγού με τον ‘συντελεστή φόρτισης’. Για τις έλικες ο συντελεστής φόρτισης ορίζεται ως5:
5 Τ συμβολίζει την ώση που μεταδίδεται από τον άξονα της έλικας
15
2P1/ 2 AT
A
TCVρ
= (4.37)
όπου: λικαςέσκουίδνειαάπιφΕAP =
AV = Ταχύτητα ομόρρου Για τον αγωγό του waterjet ο συντελεστής φόρτισης ορίζεται όμοια με τον αντίστοιχο των ελίκων, όπου η επιφάνεια της έλικας αντικαθίσταται από την επιφάνεια του ακροφυσίου6:
27 11/ 2 AT
TCVρ
= (4.38)
Έχουμε:
1 0 207 1 7 7 7 1 7 7
2 2 2 27 1 7 1 7 1 0 0
( ) A ( ) 2 21/ 2 A 1/ 2 A 1/ 2 A
w V V
Tm V V V V V V VTC
V V V Vρ
ρ ρ ρ
= ⇒ =− −= = = = −
V⇒
2 2(JVR JVR)TC = − (4.39)
ή συναρτήσει του μ:
1 12 ( 1)TCμ μ
= − (4.40)
Λύνοντας την σχέση (4.39) ως προς JVR παίρνουμε:
JVR 1/ 2 1/ 2 1 2 TC= + + (4.41) Αντικαθιστώντας την (4.41) στην (4.35) και κάνοντας τις πράξεις:
T
43 1 2Cduct idealn − =+ +
(4.42)
Από την σχέση 4.42 για να έχομε nduct-ideal→1 θα πρέπει CT→0. Άρα η περίπτωση 100% ιδανικής απόδοσης αγωγού είναι εξωπραγματική αφού ωδηγεί σε μηδενισμό της παραγόμενης ώσης. Περαιτέρω το CT μπορεί να τείνει στο μηδέν είτε όταν αυξάνεται η επιφάνεια του ακροφυσίου Α7, σχέση 4.37, είτε όταν το μ τείνει στη μονάδα, δηλαδή όταν η ταχύτητα του ρευστού στην έξοδο (σταθμός 7) πλησιάζει την ταχύτητα του πλοίου, σχέση 4.40. 4.4. Σύγκριση της ιδανικής απόδοσης αγωγού waterjet με την αντίστοιχη
ιδανική απόδοση συμβατικής έλικας Στις έλικες έχει παραχθεί η ακόλουθη σχέση για τον ιδανικό βαθμό απόδοσης, PNA-1988:
21 1i
T
nC
=+ +
(4.43)
6 Τ συμβολίζει την συνολικά αναπτυσσόμενη ώση από το waterjet, σχέση 3.1.
16
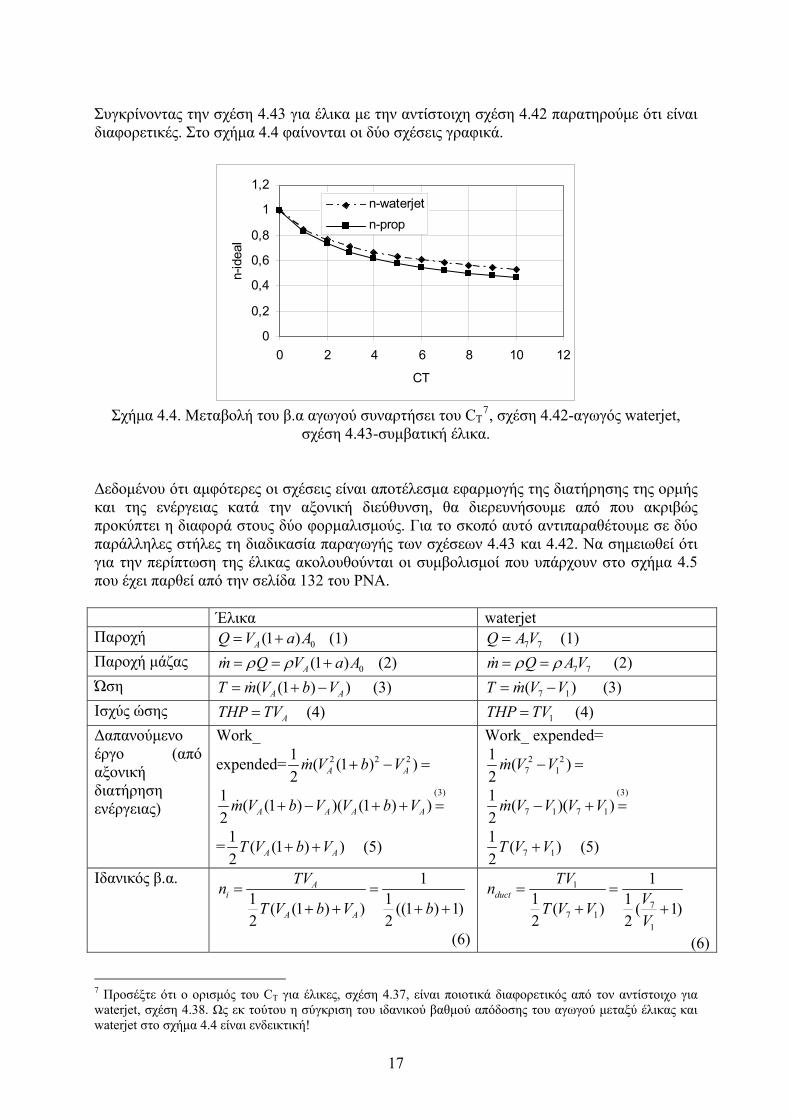
Συγκρίνοντας την σχέση 4.43 για έλικα με την αντίστοιχη σχέση 4.42 παρατηρούμε ότι είναι διαφορετικές. Στο σχήμα 4.4 φαίνονται οι δύο σχέσεις γραφικά.
0
0,2
0,4
0,6
0,8
1
1,2
n-id
eal
0 2 4 6 8 10 12
CT
n-waterjetn-prop
Σχήμα 4.4. Μεταβολή του β.α αγωγού συναρτήσει του CT
7, σχέση 4.42-αγωγός waterjet, σχέση 4.43-συμβατική έλικα.
Δεδομένου ότι αμφότερες οι σχέσεις είναι αποτέλεσμα εφαρμογής της διατήρησης της ορμής και της ενέργειας κατά την αξονική διεύθυνση, θα διερευνήσουμε από που ακριβώς προκύπτει η διαφορά στους δύο φορμαλισμούς. Για το σκοπό αυτό αντιπαραθέτουμε σε δύο παράλληλες στήλες τη διαδικασία παραγωγής των σχέσεων 4.43 και 4.42. Να σημειωθεί ότι για την περίπτωση της έλικας ακολουθούνται οι συμβολισμοί που υπάρχουν στο σχήμα 4.5 που έχει παρθεί από την σελίδα 132 του PNA. Έλικα waterjet Παροχή 0(1 )AQ V a A+ 7 7Q A V (1) = = (1) Παροχή μάζας 0(1 )Am Q V a A= ρ ρ= + 7 7m Q A V (2) = ρ ρ= (2) Ώση ( (1 ) )A AT m V b V= + − 7 1( )T m V V (3) = − (3) Ισχύς ώσης ATHP TV= 1THP TV (4) = (4) Δαπανούμενο έργο (από αξονική διατήρηση ενέργειας)
Work_
expended= 2 2 21 ( (1 ) )2 A Am V b V+ − =
(3)
)( (1 ) )A AV b V+ + =1 ( (1 )2 A Am V b V+ −
= 1 ( (1 ) )2 A AT V b V+ + (5)
Work_ expended= 2 2
7 11 ( )2
m V V − =
(3)
7 1 7 11 ( )( )2
m V V V V− + =
7 11 ( )2
T V V+ (5)
Ιδανικός β.α. 11 1) ((1 ) 1)2 2A AV b
= =+ +( (1 )
Ai
TVnT V b+ +
(6)
1
77 1
1
11 1( ) ( 1)2 2
ductTVn VT V V
V
= =+ +
(6)
7 Προσέξτε ότι ο ορισμός του CT για έλικες, σχέση 4.37, είναι ποιοτικά διαφορετικός από τον αντίστοιχο για waterjet, σχέση 4.38. Ως εκ τούτου η σύγκριση του ιδανικού βαθμού απόδοσης του αγωγού μεταξύ έλικας και waterjet στο σχήμα 4.4 είναι ενδεικτική!
17
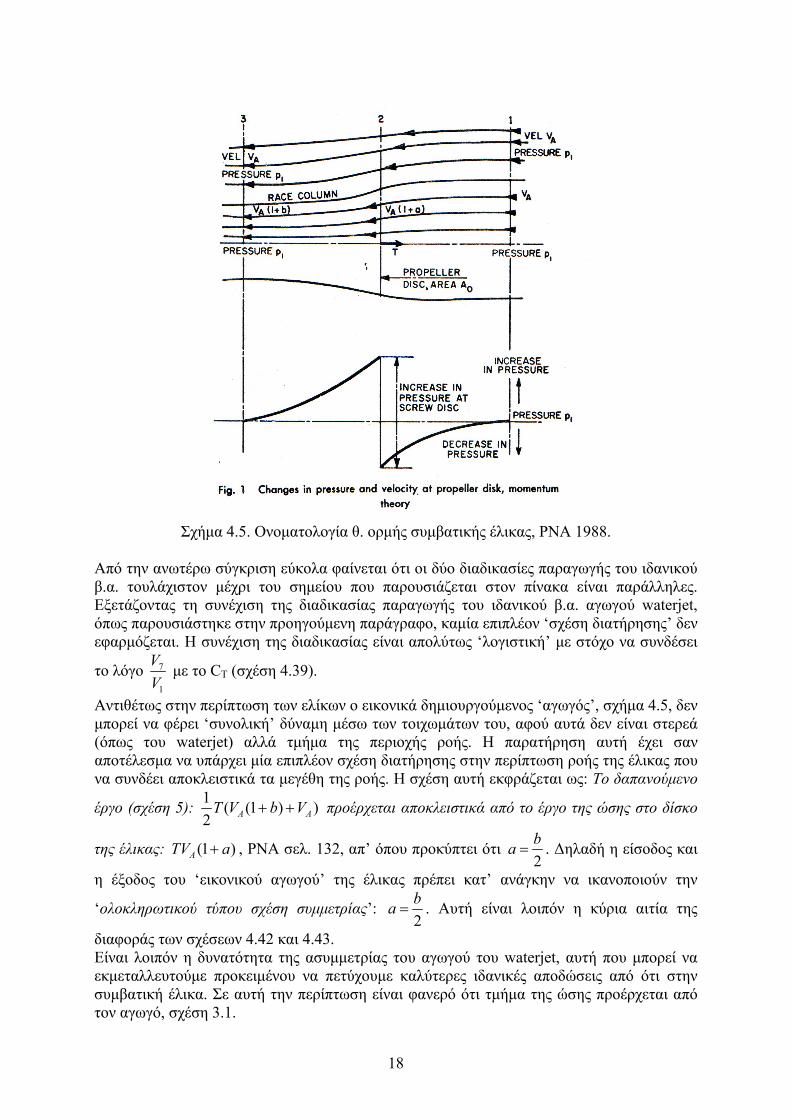
Σχήμα 4.5. Ονοματολογία θ. ορμής συμβατικής έλικας, PNA 1988.
Από την ανωτέρω σύγκριση εύκολα φαίνεται ότι οι δύο διαδικασίες παραγωγής του ιδανικού β.α. τουλάχιστον μέχρι του σημείου που παρουσιάζεται στον πίνακα είναι παράλληλες. Εξετάζοντας τη συνέχιση της διαδικασίας παραγωγής του ιδανικού β.α. αγωγού waterjet, όπως παρουσιάστηκε στην προηγούμενη παράγραφο, καμία επιπλέον ‘σχέση διατήρησης’ δεν εφαρμόζεται. Η συνέχιση της διαδικασίας είναι απολύτως ‘λογιστική’ με στόχο να συνδέσει
το λόγο 7
1
VV
με το CT (σχέση 4.39).
Αντιθέτως στην περίπτωση των ελίκων ο εικονικά δημιουργούμενος ‘αγωγός’, σχήμα 4.5, δεν μπορεί να φέρει ‘συνολική’ δύναμη μέσω των τοιχωμάτων του, αφού αυτά δεν είναι στερεά (όπως του waterjet) αλλά τμήμα της περιοχής ροής. Η παρατήρηση αυτή έχει σαν αποτέλεσμα να υπάρχει μία επιπλέον σχέση διατήρησης στην περίπτωση ροής της έλικας που να συνδέει αποκλειστικά τα μεγέθη της ροής. Η σχέση αυτή εκφράζεται ως: Το δαπανούμενο
έργο (σχέση 5): 1 ( (1 ) )2 AT V b V+ + A προέρχεται αποκλειστικά από το έργο της ώσης στο δίσκο
της έλικας: , PNA σελ. 132, απ’ όπου προκύπτει ότι (1 )ATV a+2ba = . Δηλαδή η είσοδος και
η έξοδος του ‘εικονικού αγωγού’ της έλικας πρέπει κατ’ ανάγκην να ικανοποιούν την
‘ολοκληρωτικού τύπου σχέση συμμετρίας’: 2ba = . Αυτή είναι λοιπόν η κύρια αιτία της
διαφοράς των σχέσεων 4.42 και 4.43. Είναι λοιπόν η δυνατότητα της ασυμμετρίας του αγωγού του waterjet, αυτή που μπορεί να εκμεταλλευτούμε προκειμένου να πετύχουμε καλύτερες ιδανικές αποδώσεις από ότι στην συμβατική έλικα. Σε αυτή την περίπτωση είναι φανερό ότι τμήμα της ώσης προέρχεται από τον αγωγό, σχέση 3.1.
18

Θα μπορούσαμε να πούμε λοιπόν συμπερασματικά ότι η διαμόρφωση των λεπτομερειών της γεωμετρίας του αγωγού και του στάτορα αποτελεί την επιπλέον ‘ελεύθερη παράμετρο’ που μπορούμε να εκμεταλλευθούμε για την βελτίωση του βαθμού απόδοσης (συγκρίνετε με τα ισχύοντα στην περίπτωση των συστημάτων βελτίωσης του β.α. ελίκων). 4.5. Βαθμός απόδοσης πτερωτής (αντλίας). Εισάγουμε ακολούθως το ‘ύψος’ Η που παράγεται από την πτερωτή και αποδίδεται στο νερό (για τον ορισμό του ‘ύψους’ – head- βλέπε παράγραφο 4.1). Το έτσι ορισμένο Η συνδέεται με το ΔΕ, σχέση 4.30, με τη σχέση:
2 27 1
57 13 71 1(1 ) (1 )2 2
V VH hg g
ζ ζΔΕ= = + − − +
g (4.44)
Η παροχή μάζας διαμέσου της πτερωτής της αντλίας είναι:
7 7m A Vρ= (4.45) και η αντίστοιχη παροχή όγκου είναι:
7 7Q A V= (4.46) Καθορίζεται έτσι το σημείο λειτουργίας της αντλίας (Q,H) σαν συνάρτηση των
,7 7 1, ,A V V 13 57 7, ,hζ ζ . Για την μελέτη της λειτουργίας της πτερωτής εισάγονται οι εξής συντελεστές: Βαθμός απόδοσης (ιδανικός):
impDI
gQHnP
ρ= (4.47)
Ειδικός αριθμός στροφών:
0,5 0,5
0,75 0,75 (SNQ NQN ή άH gH
αδι στατη μορφ⎛
= ⎜⎝ ⎠
)ή⎞⎟ (4.48)
όπου: αςίλειτουργςέστροφΝ →
ήπαροχQ → ψοςύόολικμενοόπαραγΗ → ςήπτερωτμετροςάδιD →
Σημειώστε ότι ο συντελεστής Ns διαθέτει και διαστατή και αδιάστατη μορφή!. Παρατηρείστε ότι ο βαθμός απόδοσης, σχέση 4.47, ‘μοιάζει’ με τον αντίστοιχο βαθμό απόδοσης που ορίζουμε για έλικα σε ελεύθερη ροή. Παρατηρήστε επίσης ότι ο ‘ειδικός αριθμός στροφών’ ‘μοιάζει’ με το αντίστροφο του CT (συντελεστής φόρτισης – σχέση 4.38)
19
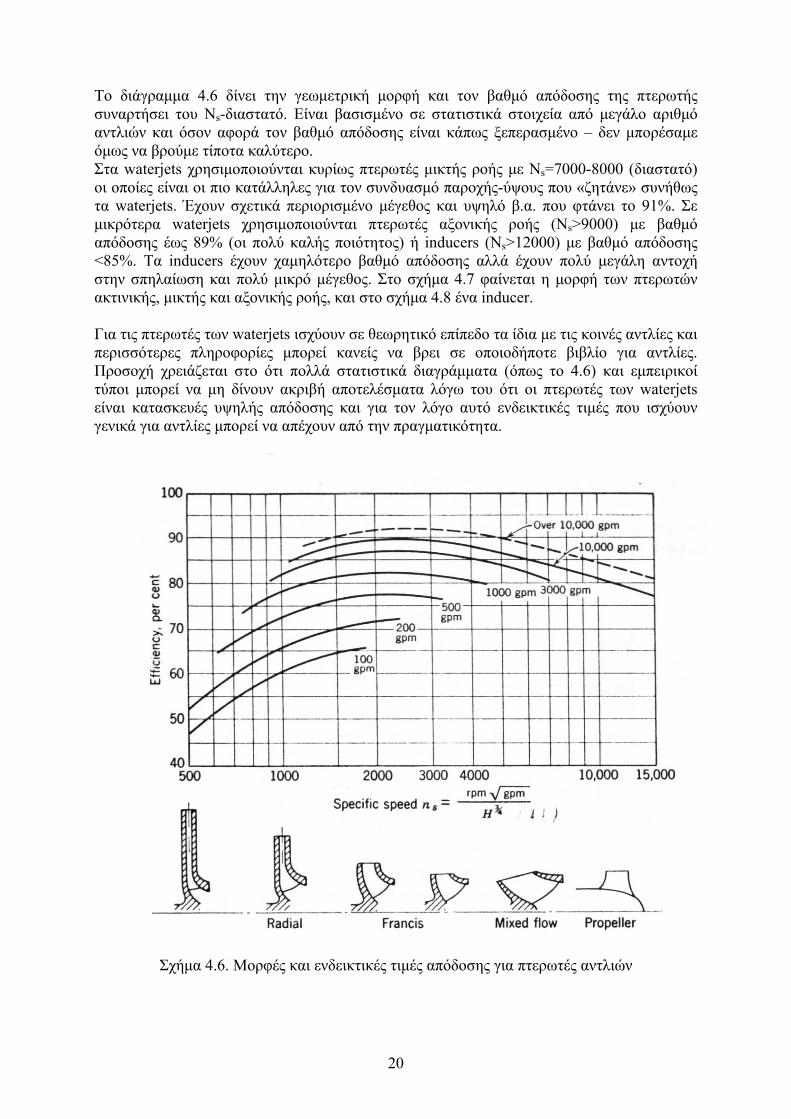
Το διάγραμμα 4.6 δίνει την γεωμετρική μορφή και τον βαθμό απόδοσης της πτερωτής συναρτήσει του Ns-διαστατό. Είναι βασισμένο σε στατιστικά στοιχεία από μεγάλο αριθμό αντλιών και όσον αφορά τον βαθμό απόδοσης είναι κάπως ξεπερασμένο – δεν μπορέσαμε όμως να βρούμε τίποτα καλύτερο. Στα waterjets χρησιμοποιούνται κυρίως πτερωτές μικτής ροής με Ns=7000-8000 (διαστατό) οι οποίες είναι οι πιο κατάλληλες για τον συνδυασμό παροχής-ύψους που «ζητάνε» συνήθως τα waterjets. Έχουν σχετικά περιορισμένο μέγεθος και υψηλό β.α. που φτάνει το 91%. Σε μικρότερα waterjets χρησιμοποιούνται πτερωτές αξονικής ροής (Ns>9000) με βαθμό απόδοσης έως 89% (οι πολύ καλής ποιότητος) ή inducers (Ns>12000) με βαθμό απόδοσης <85%. Τα inducers έχουν χαμηλότερο βαθμό απόδοσης αλλά έχουν πολύ μεγάλη αντοχή στην σπηλαίωση και πολύ μικρό μέγεθος. Στο σχήμα 4.7 φαίνεται η μορφή των πτερωτών ακτινικής, μικτής και αξονικής ροής, και στο σχήμα 4.8 ένα inducer. Για τις πτερωτές των waterjets ισχύουν σε θεωρητικό επίπεδο τα ίδια με τις κοινές αντλίες και περισσότερες πληροφορίες μπορεί κανείς να βρει σε οποιοδήποτε βιβλίο για αντλίες. Προσοχή χρειάζεται στο ότι πολλά στατιστικά διαγράμματα (όπως το 4.6) και εμπειρικοί τύποι μπορεί να μη δίνουν ακριβή αποτελέσματα λόγω του ότι οι πτερωτές των waterjets είναι κατασκευές υψηλής απόδοσης και για τον λόγο αυτό ενδεικτικές τιμές που ισχύουν γενικά για αντλίες μπορεί να απέχουν από την πραγματικότητα.
Σχήμα 4.6. Μορφές και ενδεικτικές τιμές απόδοσης για πτερωτές αντλιών
20
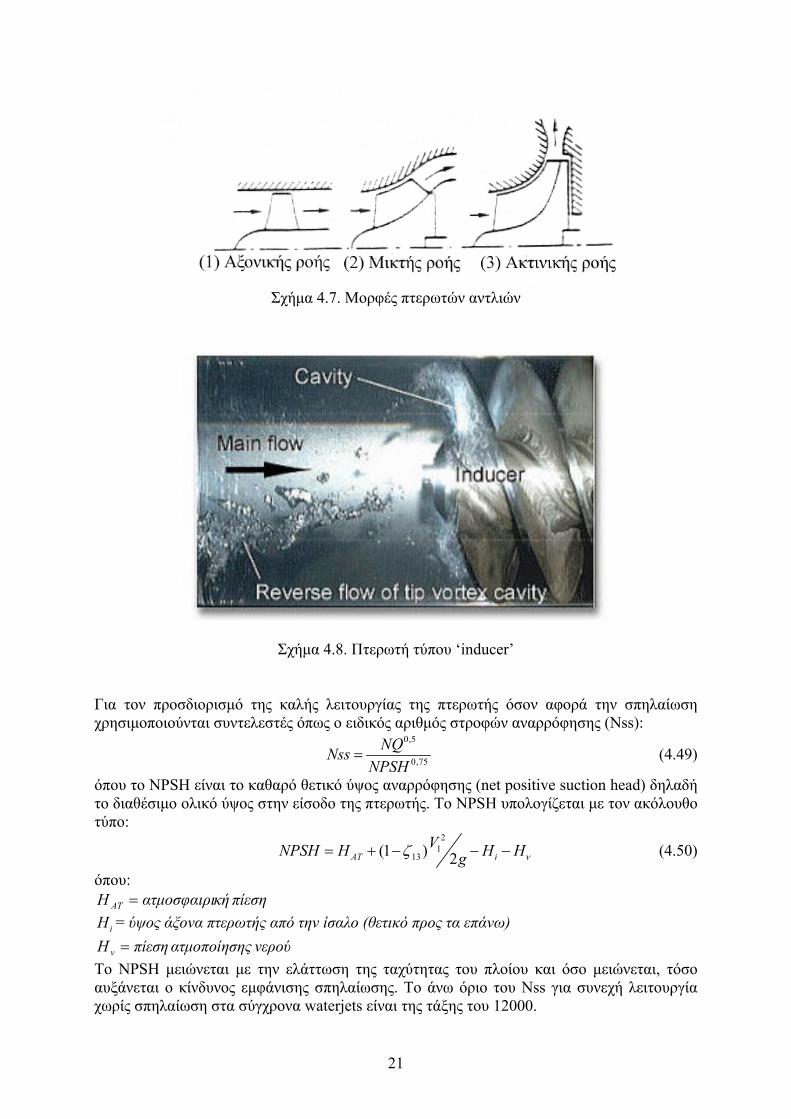
Σχήμα 4.7. Μορφές πτερωτών αντλιών
Σχήμα 4.8. Πτερωτή τύπου ‘inducer’ Για τον προσδιορισμό της καλής λειτουργίας της πτερωτής όσον αφορά την σπηλαίωση χρησιμοποιούνται συντελεστές όπως ο ειδικός αριθμός στροφών αναρρόφησης (Nss):
0,5
0,75
NQNssNPSH
= (4.49)
όπου το NPSH είναι το καθαρό θετικό ύψος αναρρόφησης (net positive suction head) δηλαδή το διαθέσιμο ολικό ύψος στην είσοδο της πτερωτής. Το NPSH υπολογίζεται με τον ακόλουθο τύπο:
21
13(1 ) 2AT iVNPSH H H Hg νζ= + − − − (4.50)
όπου: εσηίπήκατμοσφαιριH AT =
iH = ύψος άξονα πτερωτής από την ίσαλο (θετικό προς τα επάνω) ύνεροησηςίατμοποεσηίπH ν =
Το NPSH μειώνεται με την ελάττωση της ταχύτητας του πλοίου και όσο μειώνεται, τόσο αυξάνεται ο κίνδυνος εμφάνισης σπηλαίωσης. Το άνω όριο του Nss για συνεχή λειτουργία χωρίς σπηλαίωση στα σύγχρονα waterjets είναι της τάξης του 12000.
21
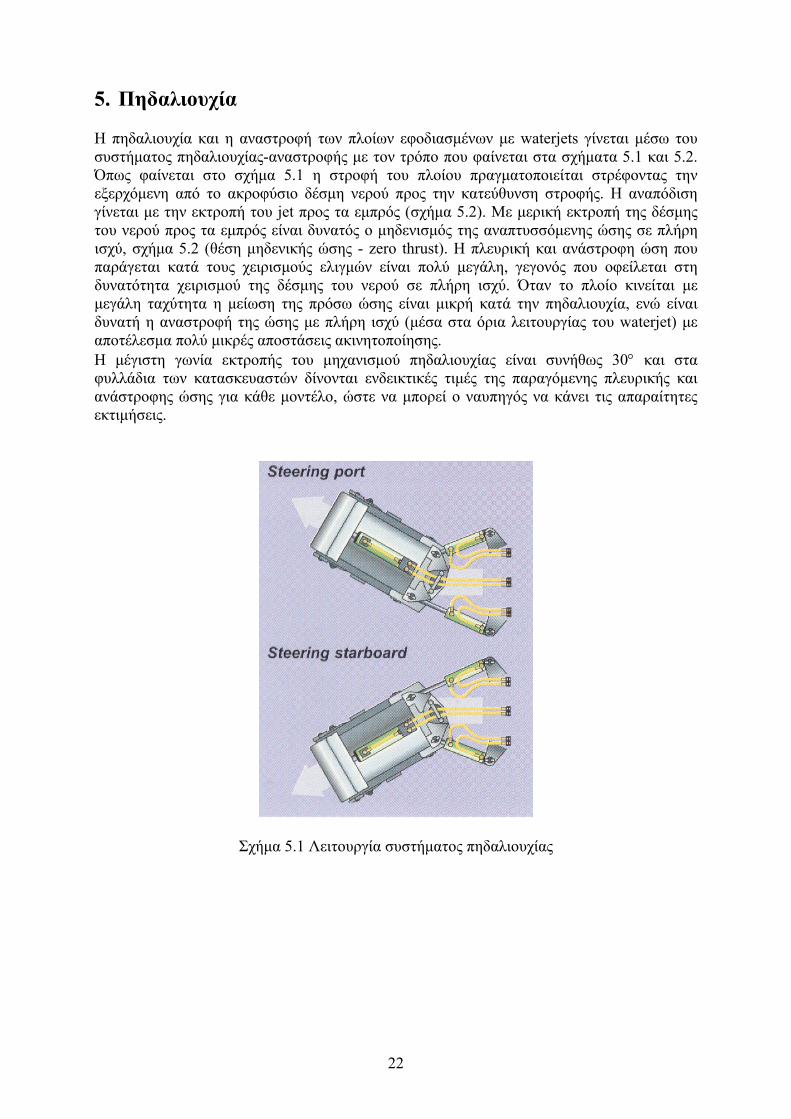
5. Πηδαλιουχία Η πηδαλιουχία και η αναστροφή των πλοίων εφοδιασμένων με waterjets γίνεται μέσω του συστήματος πηδαλιουχίας-αναστροφής με τον τρόπο που φαίνεται στα σχήματα 5.1 και 5.2. Όπως φαίνεται στο σχήμα 5.1 η στροφή του πλοίου πραγματοποιείται στρέφοντας την εξερχόμενη από το ακροφύσιο δέσμη νερού προς την κατεύθυνση στροφής. Η αναπόδιση γίνεται με την εκτροπή του jet προς τα εμπρός (σχήμα 5.2). Με μερική εκτροπή της δέσμης του νερού προς τα εμπρός είναι δυνατός ο μηδενισμός της αναπτυσσόμενης ώσης σε πλήρη ισχύ, σχήμα 5.2 (θέση μηδενικής ώσης - zero thrust). Η πλευρική και ανάστροφη ώση που παράγεται κατά τους χειρισμούς ελιγμών είναι πολύ μεγάλη, γεγονός που οφείλεται στη δυνατότητα χειρισμού της δέσμης του νερού σε πλήρη ισχύ. Όταν το πλοίο κινείται με μεγάλη ταχύτητα η μείωση της πρόσω ώσης είναι μικρή κατά την πηδαλιουχία, ενώ είναι δυνατή η αναστροφή της ώσης με πλήρη ισχύ (μέσα στα όρια λειτουργίας του waterjet) με αποτέλεσμα πολύ μικρές αποστάσεις ακινητοποίησης. Η μέγιστη γωνία εκτροπής του μηχανισμού πηδαλιουχίας είναι συνήθως 30° και στα φυλλάδια των κατασκευαστών δίνονται ενδεικτικές τιμές της παραγόμενης πλευρικής και ανάστροφης ώσης για κάθε μοντέλο, ώστε να μπορεί ο ναυπηγός να κάνει τις απαραίτητες εκτιμήσεις.
Σχήμα 5.1 Λειτουργία συστήματος πηδαλιουχίας
22
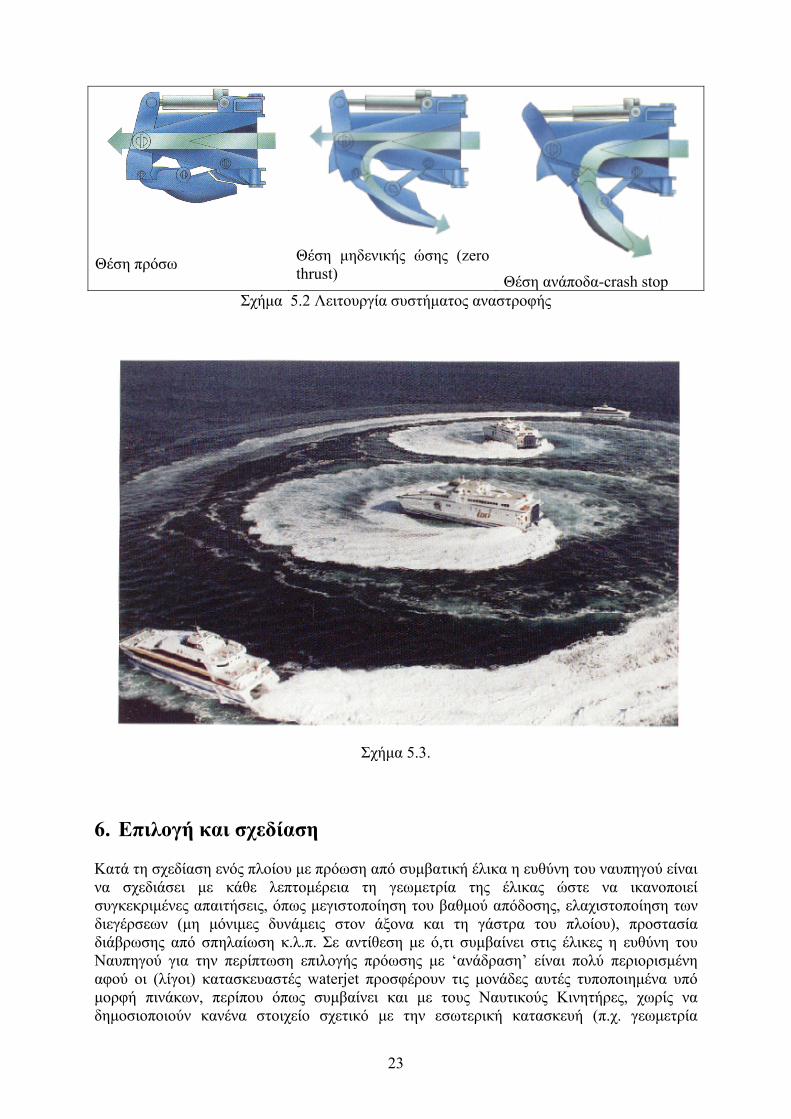
Θέση πρόσω Θέση μηδενικής ώσης (zero
thrust) Θέση ανάποδα-crash stop Σχήμα 5.2 Λειτουργία συστήματος αναστροφής
Σχήμα 5.3.
6. Επιλογή και σχεδίαση Κατά τη σχεδίαση ενός πλοίου με πρόωση από συμβατική έλικα η ευθύνη του ναυπηγού είναι να σχεδιάσει με κάθε λεπτομέρεια τη γεωμετρία της έλικας ώστε να ικανοποιεί συγκεκριμένες απαιτήσεις, όπως μεγιστοποίηση του βαθμού απόδοσης, ελαχιστοποίηση των διεγέρσεων (μη μόνιμες δυνάμεις στον άξονα και τη γάστρα του πλοίου), προστασία διάβρωσης από σπηλαίωση κ.λ.π. Σε αντίθεση με ό,τι συμβαίνει στις έλικες η ευθύνη του Ναυπηγού για την περίπτωση επιλογής πρόωσης με ‘ανάδραση’ είναι πολύ περιορισμένη αφού οι (λίγοι) κατασκευαστές waterjet προσφέρουν τις μονάδες αυτές τυποποιημένα υπό μορφή πινάκων, περίπου όπως συμβαίνει και με τους Ναυτικούς Κινητήρες, χωρίς να δημοσιοποιούν κανένα στοιχείο σχετικό με την εσωτερική κατασκευή (π.χ. γεωμετρία
23
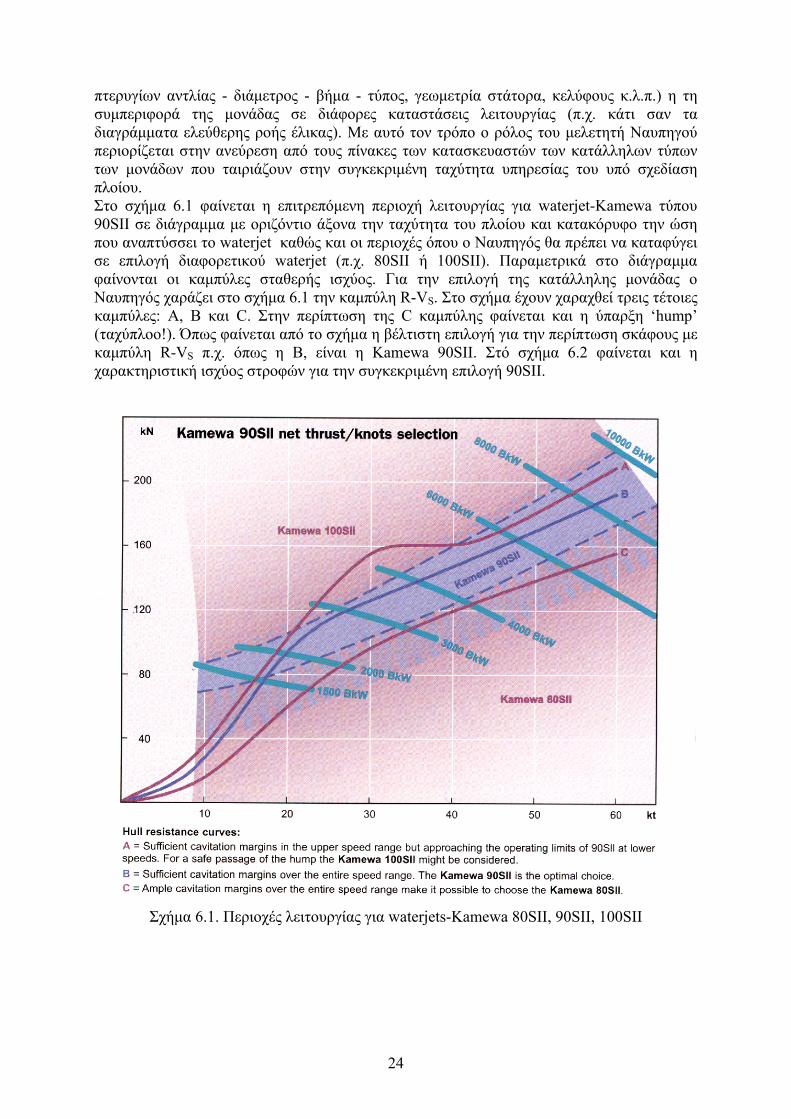
πτερυγίων αντλίας - διάμετρος - βήμα - τύπος, γεωμετρία στάτορα, κελύφους κ.λ.π.) η τη συμπεριφορά της μονάδας σε διάφορες καταστάσεις λειτουργίας (π.χ. κάτι σαν τα διαγράμματα ελεύθερης ροής έλικας). Με αυτό τον τρόπο ο ρόλος του μελετητή Ναυπηγού περιορίζεται στην ανεύρεση από τους πίνακες των κατασκευαστών των κατάλληλων τύπων των μονάδων που ταιριάζουν στην συγκεκριμένη ταχύτητα υπηρεσίας του υπό σχεδίαση πλοίου. Στο σχήμα 6.1 φαίνεται η επιτρεπόμενη περιοχή λειτουργίας για waterjet-Kamewa τύπου 90SII σε διάγραμμα με οριζόντιο άξονα την ταχύτητα του πλοίου και κατακόρυφο την ώση που αναπτύσσει το waterjet καθώς και οι περιοχές όπου ο Ναυπηγός θα πρέπει να καταφύγει σε επιλογή διαφορετικού waterjet (π.χ. 80SII ή 100SII). Παραμετρικά στο διάγραμμα φαίνονται οι καμπύλες σταθερής ισχύος. Για την επιλογή της κατάλληλης μονάδας ο Ναυπηγός χαράζει στο σχήμα 6.1 την καμπύλη R-VS. Στο σχήμα έχουν χαραχθεί τρεις τέτοιες καμπύλες: Α, B και C. Στην περίπτωση της C καμπύλης φαίνεται και η ύπαρξη ‘hump’ (ταχύπλοο!). Όπως φαίνεται από το σχήμα η βέλτιστη επιλογή για την περίπτωση σκάφους με καμπύλη R-VS π.χ. όπως η Β, είναι η Kamewa 90SII. Στό σχήμα 6.2 φαίνεται και η χαρακτηριστική ισχύος στροφών για την συγκεκριμένη επιλογή 90SII.
Σχήμα 6.1. Περιοχές λειτουργίας για waterjets-Kamewa 80SII, 90SII, 100SII
24
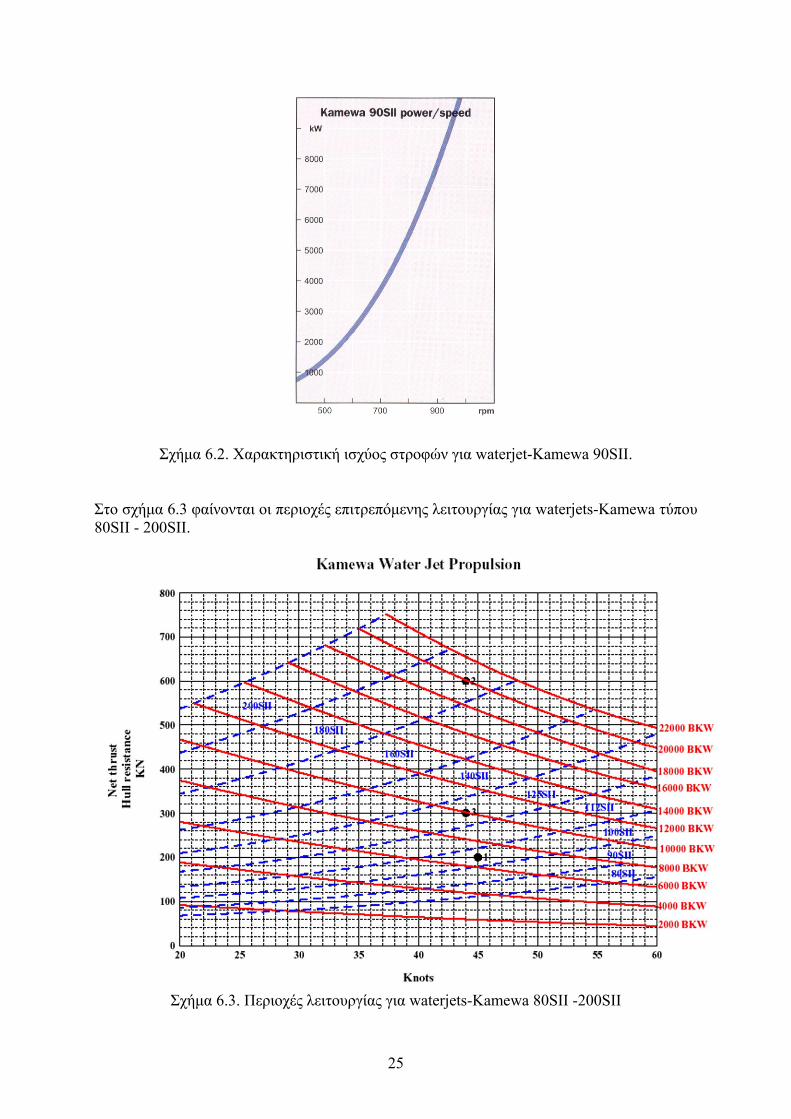
Σχήμα 6.2. Χαρακτηριστική ισχύος στροφών για waterjet-Kamewa 90SII.
Στο σχήμα 6.3 φαίνονται οι περιοχές επιτρεπόμενης λειτουργίας για waterjets-Kamewa τύπου 80SII - 200SII.
Σχήμα 6.3. Περιοχές λειτουργίας για waterjets-Kamewa 80SII -200SII
25
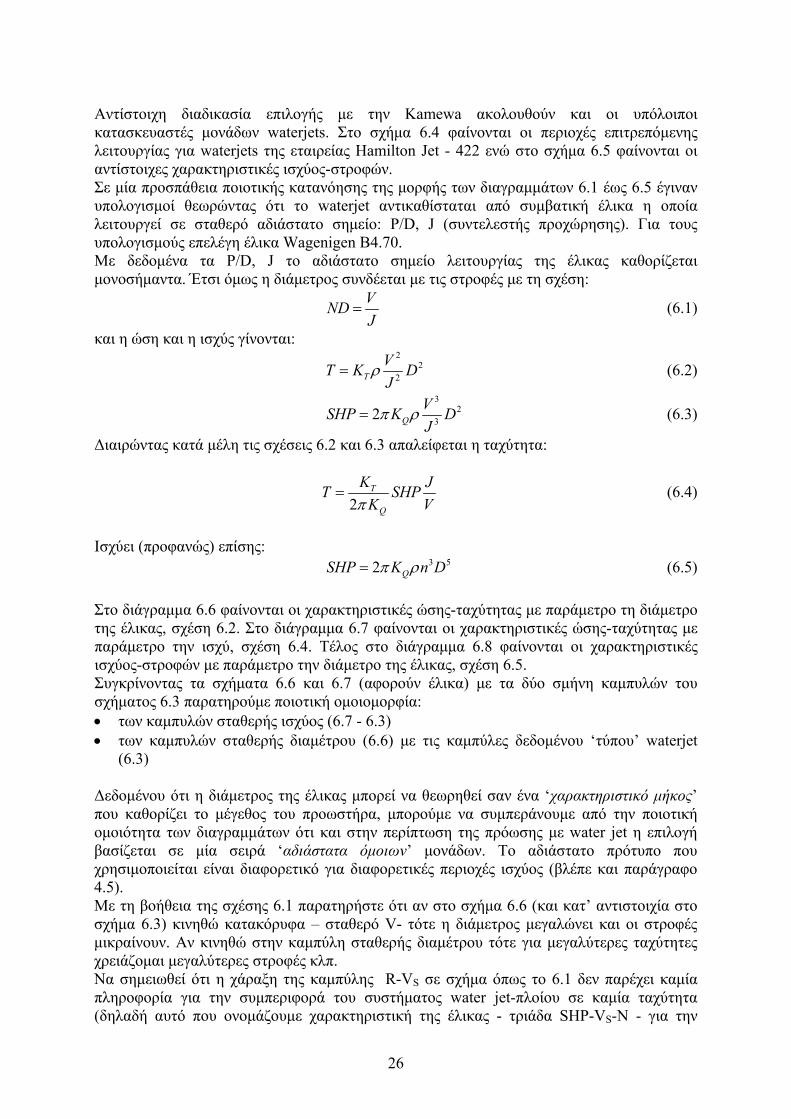
Αντίστοιχη διαδικασία επιλογής με την Kamewa ακολουθούν και οι υπόλοιποι κατασκευαστές μονάδων waterjets. Στο σχήμα 6.4 φαίνονται οι περιοχές επιτρεπόμενης λειτουργίας για waterjets της εταιρείας Hamilton Jet - 422 ενώ στο σχήμα 6.5 φαίνονται οι αντίστοιχες χαρακτηριστικές ισχύος-στροφών. Σε μία προσπάθεια ποιοτικής κατανόησης της μορφής των διαγραμμάτων 6.1 έως 6.5 έγιναν υπολογισμοί θεωρώντας ότι το waterjet αντικαθίσταται από συμβατική έλικα η οποία λειτουργεί σε σταθερό αδιάστατο σημείο: P/D, J (συντελεστής προχώρησης). Για τους υπολογισμούς επελέγη έλικα Wagenigen B4.70. Με δεδομένα τα P/D, J το αδιάστατο σημείο λειτουργίας της έλικας καθορίζεται μονοσήμαντα. Έτσι όμως η διάμετρος συνδέεται με τις στροφές με τη σχέση:
VNDJ
= (6.1)
και η ώση και η ισχύς γίνονται: 2
22T
VT K DJ
ρ= (6.2)
32
32 QVSHP K DJ
π ρ= (6.3)
Διαιρώντας κατά μέλη τις σχέσεις 6.2 και 6.3 απαλείφεται η ταχύτητα:
2T
Q
KT SHK Vπ
=JP (6.4)
Ισχύει (προφανώς) επίσης:
3 52 QSHP K n Dπ ρ= (6.5) Στο διάγραμμα 6.6 φαίνονται οι χαρακτηριστικές ώσης-ταχύτητας με παράμετρο τη διάμετρο της έλικας, σχέση 6.2. Στο διάγραμμα 6.7 φαίνονται οι χαρακτηριστικές ώσης-ταχύτητας με παράμετρο την ισχύ, σχέση 6.4. Τέλος στο διάγραμμα 6.8 φαίνονται οι χαρακτηριστικές ισχύος-στροφών με παράμετρο την διάμετρο της έλικας, σχέση 6.5. Συγκρίνοντας τα σχήματα 6.6 και 6.7 (αφορούν έλικα) με τα δύο σμήνη καμπυλών του σχήματος 6.3 παρατηρούμε ποιοτική ομοιομορφία: • των καμπυλών σταθερής ισχύος (6.7 - 6.3) • των καμπυλών σταθερής διαμέτρου (6.6) με τις καμπύλες δεδομένου ‘τύπου’ waterjet
(6.3) Δεδομένου ότι η διάμετρος της έλικας μπορεί να θεωρηθεί σαν ένα ‘χαρακτηριστικό μήκος’ που καθορίζει το μέγεθος του προωστήρα, μπορούμε να συμπεράνουμε από την ποιοτική ομοιότητα των διαγραμμάτων ότι και στην περίπτωση της πρόωσης με water jet η επιλογή βασίζεται σε μία σειρά ‘αδιάστατα όμοιων’ μονάδων. Το αδιάστατο πρότυπο που χρησιμοποιείται είναι διαφορετικό για διαφορετικές περιοχές ισχύος (βλέπε και παράγραφο 4.5). Με τη βοήθεια της σχέσης 6.1 παρατηρήστε ότι αν στο σχήμα 6.6 (και κατ’ αντιστοιχία στο σχήμα 6.3) κινηθώ κατακόρυφα – σταθερό V- τότε η διάμετρος μεγαλώνει και οι στροφές μικραίνουν. Αν κινηθώ στην καμπύλη σταθερής διαμέτρου τότε για μεγαλύτερες ταχύτητες χρειάζομαι μεγαλύτερες στροφές κλπ. Να σημειωθεί ότι η χάραξη της καμπύλης R-VS σε σχήμα όπως το 6.1 δεν παρέχει καμία πληροφορία για την συμπεριφορά του συστήματος water jet-πλοίου σε καμία ταχύτητα (δηλαδή αυτό που ονομάζουμε χαρακτηριστική της έλικας - τριάδα SHP-VS-N - για την
26
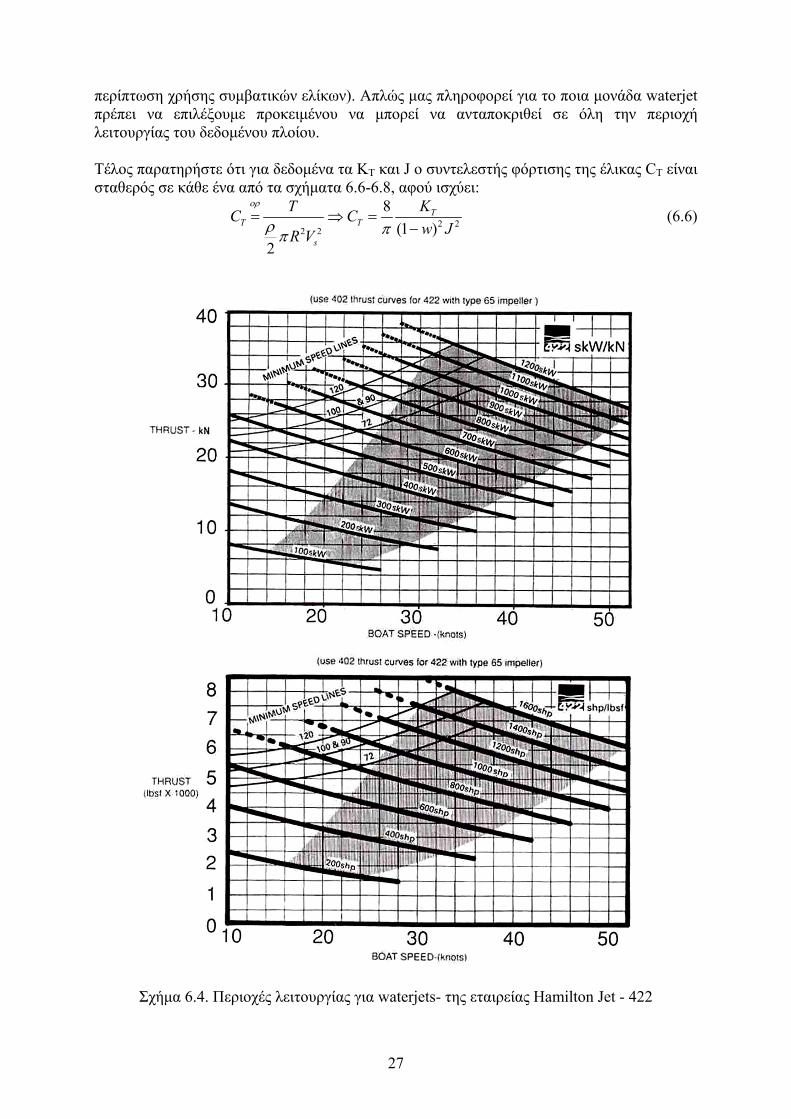
περίπτωση χρήσης συμβατικών ελίκων). Απλώς μας πληροφορεί για το ποια μονάδα waterjet πρέπει να επιλέξουμε προκειμένου να μπορεί να ανταποκριθεί σε όλη την περιοχή λειτουργίας του δεδομένου πλοίου. Τέλος παρατηρήστε ότι για δεδομένα τα ΚΤ και J ο συντελεστής φόρτισης της έλικας CT είναι σταθερός σε κάθε ένα από τα σχήματα 6.6-6.8, αφού ισχύει:
2 22 2
8(1 )
2
TT T
s
KTC Cw JR V
ορ
ρ ππ= ⇒ =
− (6.6)
Σχήμα 6.4. Περιοχές λειτουργίας για waterjets- της εταιρείας Hamilton Jet - 422
27
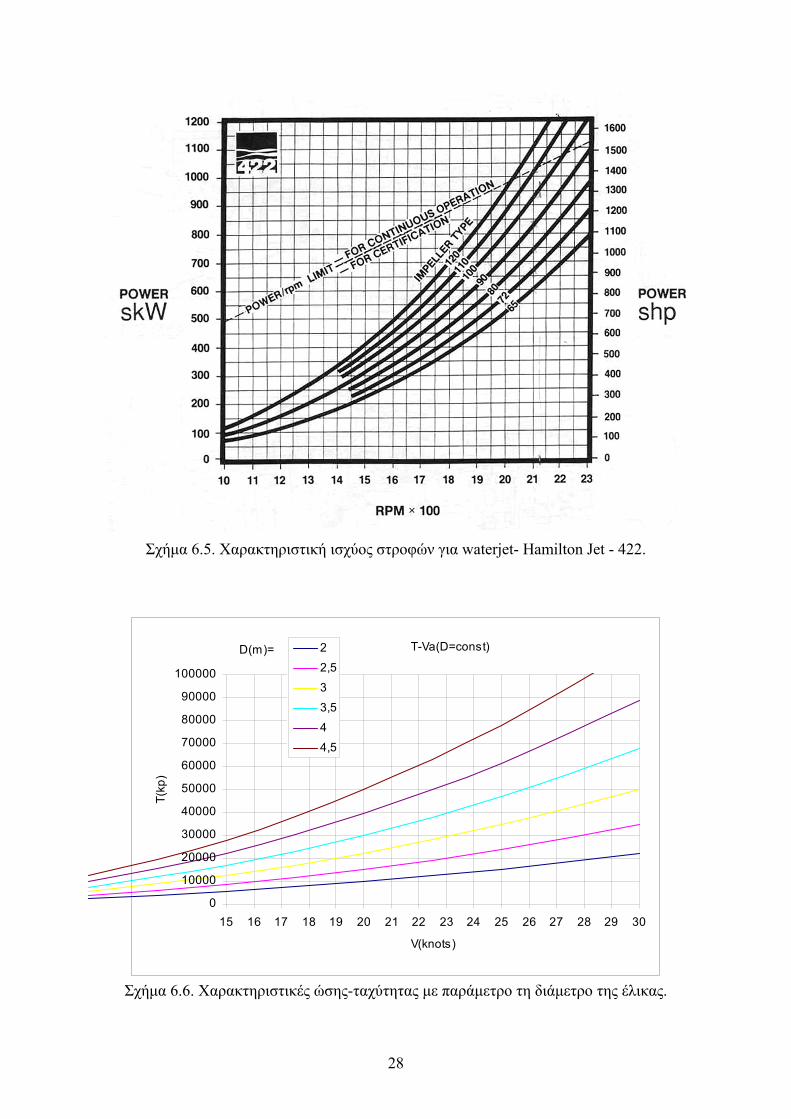
Σχήμα 6.5. Χαρακτηριστική ισχύος στροφών για waterjet- Hamilton Jet - 422.
T-Va(D=const)
0
10000
20000
30000
40000
50000
60000
70000
80000
90000
100000
15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
V(knots)
T(kp
)
2
2,5
3
3,5
4
4,5
D(m)=
Σχήμα 6.6. Χαρακτηριστικές ώσης-ταχύτητας με παράμετρο τη διάμετρο της έλικας.
28
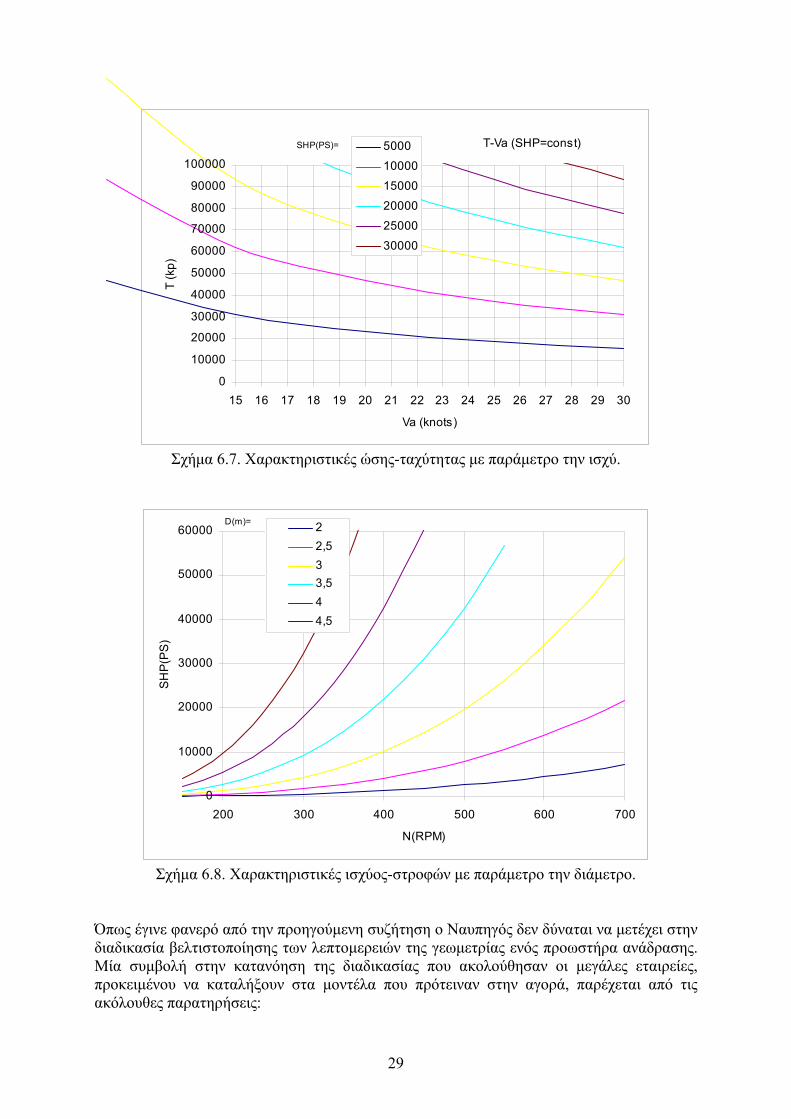
T-Va (SHP=const)
0
10000
20000
30000
40000
50000
60000
70000
80000
90000
100000
15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
Va (knots)
T (k
p)
5000
10000
15000
20000
25000
30000
SHP(PS)=
Σχήμα 6.7. Χαρακτηριστικές ώσης-ταχύτητας με παράμετρο την ισχύ.
0
10000
20000
30000
40000
50000
60000
200 300 400 500 600 700
N(RPM)
SH
P(P
S)
22,533,544,5
D(m)=
Σχήμα 6.8. Χαρακτηριστικές ισχύος-στροφών με παράμετρο την διάμετρο. Όπως έγινε φανερό από την προηγούμενη συζήτηση ο Ναυπηγός δεν δύναται να μετέχει στην διαδικασία βελτιστοποίησης των λεπτομερειών της γεωμετρίας ενός προωστήρα ανάδρασης. Μία συμβολή στην κατανόηση της διαδικασίας που ακολούθησαν οι μεγάλες εταιρείες, προκειμένου να καταλήξουν στα μοντέλα που πρότειναν στην αγορά, παρέχεται από τις ακόλουθες παρατηρήσεις:
29
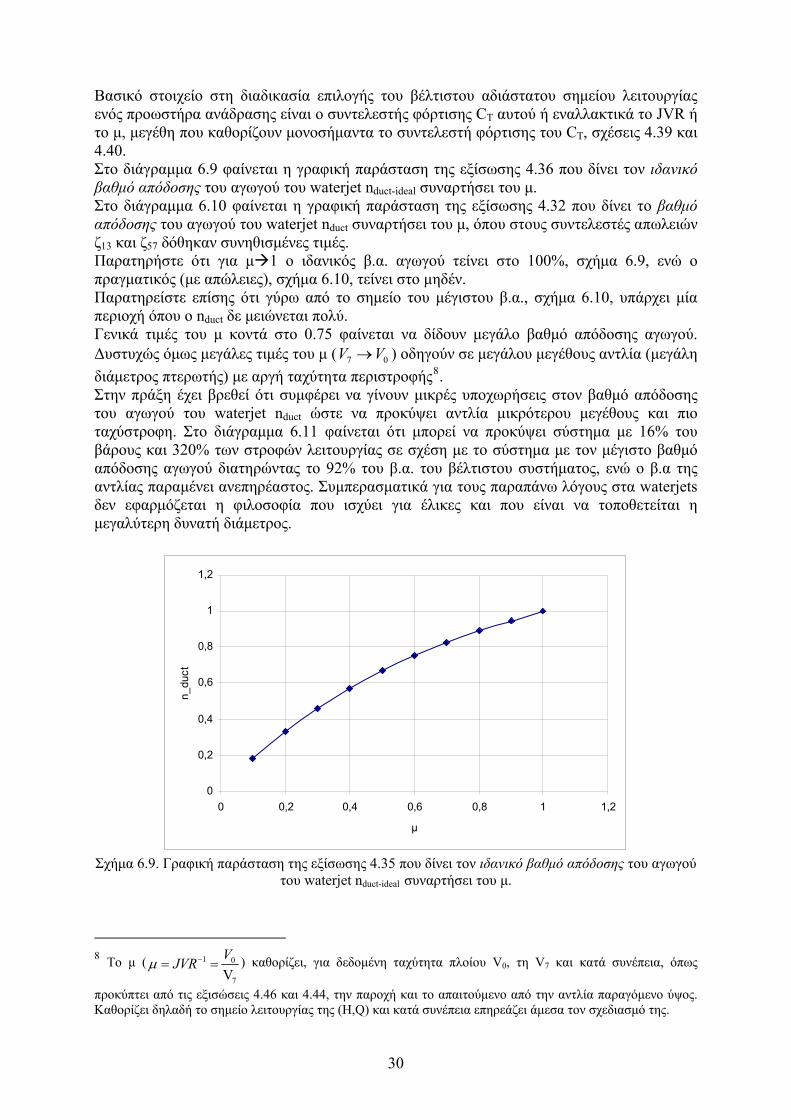
Βασικό στοιχείο στη διαδικασία επιλογής του βέλτιστου αδιάστατου σημείου λειτουργίας ενός προωστήρα ανάδρασης είναι ο συντελεστής φόρτισης CΤ αυτού ή εναλλακτικά το JVR ή το μ, μεγέθη που καθορίζουν μονοσήμαντα το συντελεστή φόρτισης του CΤ, σχέσεις 4.39 και 4.40. Στο διάγραμμα 6.9 φαίνεται η γραφική παράσταση της εξίσωσης 4.36 που δίνει τον ιδανικό βαθμό απόδοσης του αγωγού του waterjet nduct-ideal συναρτήσει του μ. Στο διάγραμμα 6.10 φαίνεται η γραφική παράσταση της εξίσωσης 4.32 που δίνει το βαθμό απόδοσης του αγωγού του waterjet nduct συναρτήσει του μ, όπου στους συντελεστές απωλειών ζ13 και ζ57 δόθηκαν συνηθισμένες τιμές. Παρατηρήστε ότι για μ 1 ο ιδανικός β.α. αγωγού τείνει στο 100%, σχήμα 6.9, ενώ ο πραγματικός (με απώλειες), σχήμα 6.10, τείνει στο μηδέν. Παρατηρείστε επίσης ότι γύρω από το σημείο του μέγιστου β.α., σχήμα 6.10, υπάρχει μία περιοχή όπου ο nduct δε μειώνεται πολύ. Γενικά τιμές του μ κοντά στο 0.75 φαίνεται να δίδουν μεγάλο βαθμό απόδοσης αγωγού. Δυστυχώς όμως μεγάλες τιμές του μ ( ) οδηγούν σε μεγάλου μεγέθους αντλία (μεγάλη διάμετρος πτερωτής) με αργή ταχύτητα περιστροφής
7V V→ 08.
Στην πράξη έχει βρεθεί ότι συμφέρει να γίνουν μικρές υποχωρήσεις στον βαθμό απόδοσης του αγωγού του waterjet nduct ώστε να προκύψει αντλία μικρότερου μεγέθους και πιο ταχύστροφη. Στο διάγραμμα 6.11 φαίνεται ότι μπορεί να προκύψει σύστημα με 16% του βάρους και 320% των στροφών λειτουργίας σε σχέση με το σύστημα με τον μέγιστο βαθμό απόδοσης αγωγού διατηρώντας το 92% του β.α. του βέλτιστου συστήματος, ενώ ο β.α της αντλίας παραμένει ανεπηρέαστος. Συμπερασματικά για τους παραπάνω λόγους στα waterjets δεν εφαρμόζεται η φιλοσοφία που ισχύει για έλικες και που είναι να τοποθετείται η μεγαλύτερη δυνατή διάμετρος.
0
0,2
0,4
0,6
0,8
1
1,2
0 0,2 0,4 0,6 0,8 1 1,2
μ
n_du
ct
Σχήμα 6.9. Γραφική παράσταση της εξίσωσης 4.35 που δίνει τον ιδανικό βαθμό απόδοσης του αγωγού
του waterjet nduct-ideal συναρτήσει του μ.
8 Το μ ( 1 0
7VVJVRμ −= = ) καθορίζει, για δεδομένη ταχύτητα πλοίου V0, τη V7 και κατά συνέπεια, όπως
προκύπτει από τις εξισώσεις 4.46 και 4.44, την παροχή και το απαιτούμενο από την αντλία παραγόμενο ύψος. Καθορίζει δηλαδή το σημείο λειτουργίας της (H,Q) και κατά συνέπεια επηρεάζει άμεσα τον σχεδιασμό της.
30
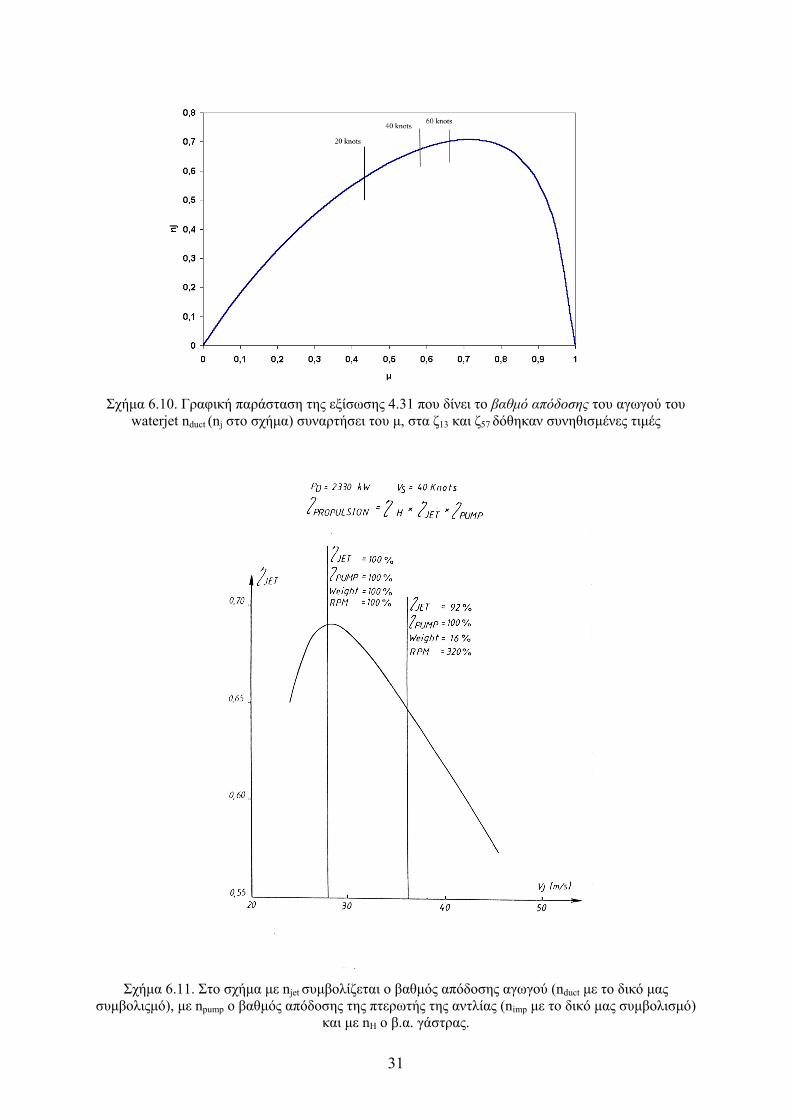
Σχήμα 6.10. Γραφική παράσταση της εξίσωσης 4.31 που δίνει το βαθμό απόδοσης του αγωγού του
waterjet nduct (nj στο σχήμα) συναρτήσει του μ, στα ζ13 και ζ57 δόθηκαν συνηθισμένες τιμές
Σχήμα 6.11. Στο σχήμα με njet συμβολίζεται ο βαθμός απόδοσης αγωγού (nduct με το δικό μας
συμβολιςμό), με npump ο βαθμός απόδοσης της πτερωτής της αντλίας (nimp με το δικό μας συμβολισμό) και με nH ο β.α. γάστρας.
31
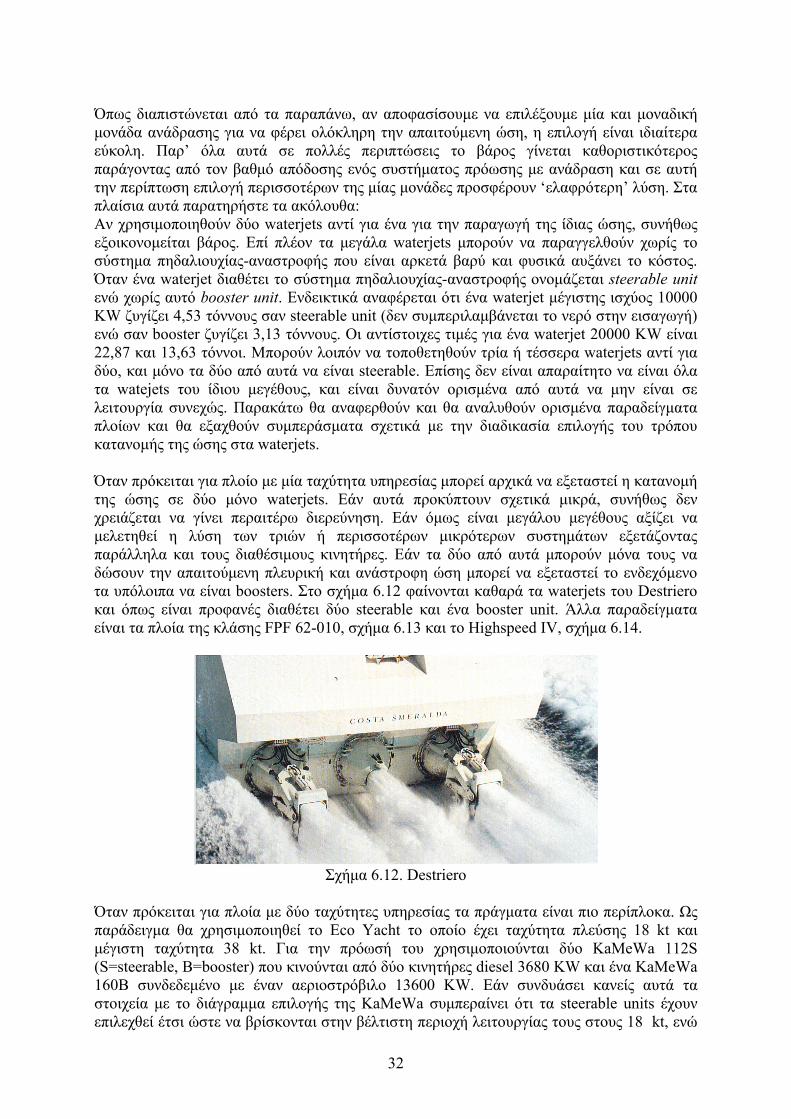
Όπως διαπιστώνεται από τα παραπάνω, αν αποφασίσουμε να επιλέξουμε μία και μοναδική μονάδα ανάδρασης για να φέρει ολόκληρη την απαιτούμενη ώση, η επιλογή είναι ιδιαίτερα εύκολη. Παρ’ όλα αυτά σε πολλές περιπτώσεις το βάρος γίνεται καθοριστικότερος παράγοντας από τον βαθμό απόδοσης ενός συστήματος πρόωσης με ανάδραση και σε αυτή την περίπτωση επιλογή περισσοτέρων της μίας μονάδες προσφέρουν ‘ελαφρότερη’ λύση. Στα πλαίσια αυτά παρατηρήστε τα ακόλουθα: Αν χρησιμοποιηθούν δύο waterjets αντί για ένα για την παραγωγή της ίδιας ώσης, συνήθως εξοικονομείται βάρος. Επί πλέον τα μεγάλα waterjets μπορούν να παραγγελθούν χωρίς το σύστημα πηδαλιουχίας-αναστροφής που είναι αρκετά βαρύ και φυσικά αυξάνει το κόστος. Όταν ένα waterjet διαθέτει το σύστημα πηδαλιουχίας-αναστροφής ονομάζεται steerable unit ενώ χωρίς αυτό booster unit. Ενδεικτικά αναφέρεται ότι ένα waterjet μέγιστης ισχύος 10000 KW ζυγίζει 4,53 τόννους σαν steerable unit (δεν συμπεριλαμβάνεται το νερό στην εισαγωγή) ενώ σαν booster ζυγίζει 3,13 τόννους. Οι αντίστοιχες τιμές για ένα waterjet 20000 KW είναι 22,87 και 13,63 τόννοι. Μπορούν λοιπόν να τοποθετηθούν τρία ή τέσσερα waterjets αντί για δύο, και μόνο τα δύο από αυτά να είναι steerable. Επίσης δεν είναι απαραίτητο να είναι όλα τα watejets του ίδιου μεγέθους, και είναι δυνατόν ορισμένα από αυτά να μην είναι σε λειτουργία συνεχώς. Παρακάτω θα αναφερθούν και θα αναλυθούν ορισμένα παραδείγματα πλοίων και θα εξαχθούν συμπεράσματα σχετικά με την διαδικασία επιλογής του τρόπου κατανομής της ώσης στα waterjets. Όταν πρόκειται για πλοίο με μία ταχύτητα υπηρεσίας μπορεί αρχικά να εξεταστεί η κατανομή της ώσης σε δύο μόνο waterjets. Εάν αυτά προκύπτουν σχετικά μικρά, συνήθως δεν χρειάζεται να γίνει περαιτέρω διερεύνηση. Εάν όμως είναι μεγάλου μεγέθους αξίζει να μελετηθεί η λύση των τριών ή περισσοτέρων μικρότερων συστημάτων εξετάζοντας παράλληλα και τους διαθέσιμους κινητήρες. Εάν τα δύο από αυτά μπορούν μόνα τους να δώσουν την απαιτούμενη πλευρική και ανάστροφη ώση μπορεί να εξεταστεί το ενδεχόμενο τα υπόλοιπα να είναι boosters. Στο σχήμα 6.12 φαίνονται καθαρά τα waterjets του Destriero και όπως είναι προφανές διαθέτει δύο steerable και ένα booster unit. Άλλα παραδείγματα είναι τα πλοία της κλάσης FPF 62-010, σχήμα 6.13 και το Highspeed IV, σχήμα 6.14.
Σχήμα 6.12. Destriero
Όταν πρόκειται για πλοία με δύο ταχύτητες υπηρεσίας τα πράγματα είναι πιο περίπλοκα. Ως παράδειγμα θα χρησιμοποιηθεί το Eco Yacht το οποίο έχει ταχύτητα πλεύσης 18 kt και μέγιστη ταχύτητα 38 kt. Για την πρόωσή του χρησιμοποιούνται δύο KaMeWa 112S (S=steerable, B=booster) που κινούνται από δύο κινητήρες diesel 3680 KW και ένα KaMeWa 160Β συνδεδεμένο με έναν αεριοστρόβιλο 13600 KW. Εάν συνδυάσει κανείς αυτά τα στοιχεία με το διάγραμμα επιλογής της KaMeWa συμπεραίνει ότι τα steerable units έχουν επιλεχθεί έτσι ώστε να βρίσκονται στην βέλτιστη περιοχή λειτουργίας τους στους 18 kt, ενώ
32

στους 38 kt βρίσκονται σε πολύ «συντηρητικό» σημείο λειτουργίας. Το 160B λειτουργεί μόνο όταν το πλοίο ταξιδεύει με 38 kt και τότε βρίσκεται εντός της προτεινόμενης από τον κατασκευαστή περιοχής λειτουργίας.
Σχήμα 6.13. FPF 62-010 class
Σχήμα 6.14. Highspeed IV
Σχήμα 6.15. Eco Yacht
33
Μπορεί να προταθεί η παρακάτω διαδικασία για την επιλογή waterjets που προορίζονται για πλοίο με δύο ταχύτητες υπηρεσίας: • Κατανομή της απαιτούμενης ώσης για την χαμηλή ταχύτητα σε δύο waterjets (σπάνια σε
περισσότερα) και επιλογή τους από τα φυλλάδια των κατασκευαστών. • Υπολογισμός της παραγόμενης ώσης από αυτά στην υψηλή ταχύτητα από τα
διαγράμματα λειτουργίας τους. • Κατανομή της υπόλοιπης ώσης σε ένα ή δύο watejets. Η απόφαση για τον αριθμό μπορεί
να εξαρτηθεί από το συνολικό βάρος τους, τους διαθέσιμους κινητήρες και μειωτήρες, τη διάταξη και το διαθέσιμο χώρο του μηχανοστασίου.
Επίσης καλό θα είναι να έχει κανείς υπόψη ότι οι στροφές λειτουργίας των μικρών waterjets και των κινητήρων τους θα αυξηθούν λίγο στην μεγάλη ταχύτητα για σταθερή ισχύ (περίπου 3%). Ορισμένα Ε/Ο είναι μελετημένα έτσι ώστε να μπορούν να λειτουργούν καλά σε περισσότερες από μία ταχύτητες, όπως το JUPITER το οποίο είναι πλοίο της ίδιας κλάσης με το TAURUS, σχήμα 6.16.
Σχήμα 6.16. Taurus class
Το JUPITER διαθέτει δύο KaMeWa 180S και δύο KaMeWa 180B. Τα 180S παίρνουν το καθένα κίνηση από δύο κινητήρες diesel ισχύος 6500 KW ο καθένας, ενώ τα 180B από δύο αεριοστρoβίλους ισχύος 22000 KW. Στο σχήμα 6.17 παρατίθεται η διάταξη του μηχανοστασίου του. Τα 180S βρίσκονται στην βέλτιστη περιοχή λειτουργίας τους σε ταχύτητα περίπου 25 kt και στην ταχύτητα υπηρεσίας των 40 kt βρίσκονται σε πολύ «συντηρητικό» σημείο λειτουργίας. Τα 180B είναι εκτός λειτουργίας σε μικρές ταχύτητες, ενώ στους 40 kt λειτουργούν στην περιοχή που υποδεικνύει ο κατασκευαστής.
34
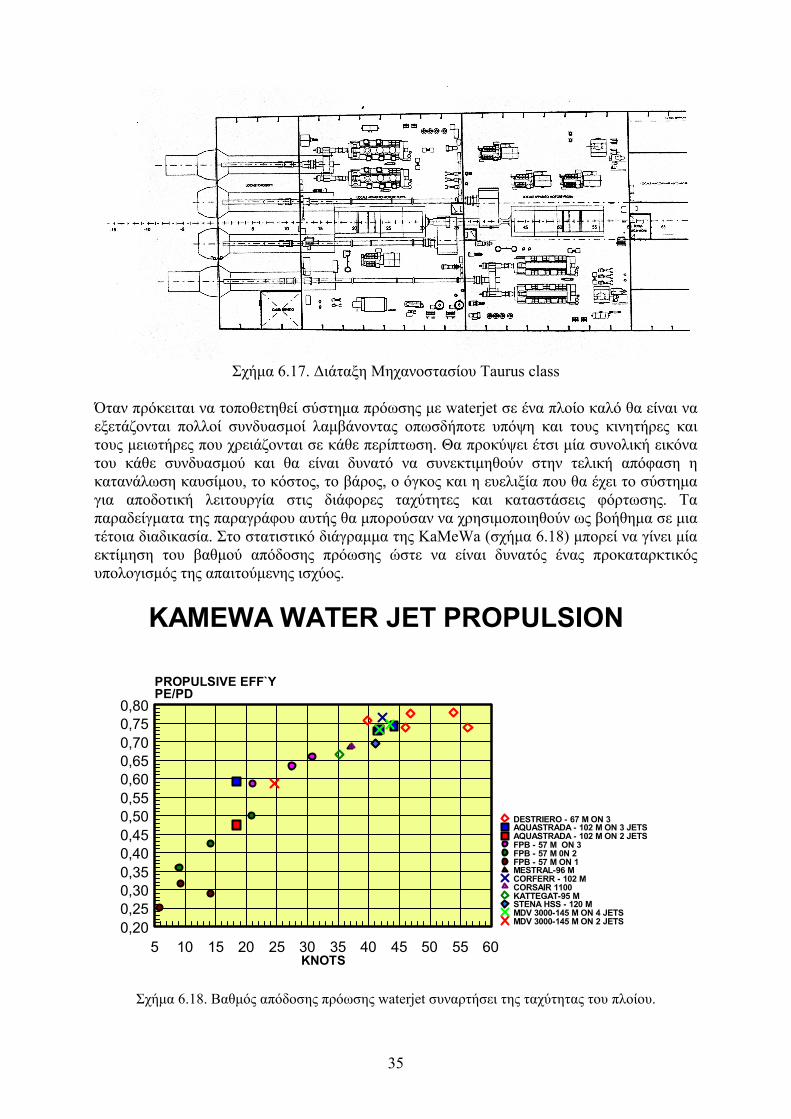
Σχήμα 6.17. Διάταξη Μηχανοστασίου Taurus class
Όταν πρόκειται να τοποθετηθεί σύστημα πρόωσης με waterjet σε ένα πλοίο καλό θα είναι να εξετάζονται πολλοί συνδυασμοί λαμβάνοντας οπωσδήποτε υπόψη και τους κινητήρες και τους μειωτήρες που χρειάζονται σε κάθε περίπτωση. Θα προκύψει έτσι μία συνολική εικόνα του κάθε συνδυασμού και θα είναι δυνατό να συνεκτιμηθούν στην τελική απόφαση η κατανάλωση καυσίμου, το κόστος, το βάρος, ο όγκος και η ευελιξία που θα έχει το σύστημα για αποδοτική λειτουργία στις διάφορες ταχύτητες και καταστάσεις φόρτωσης. Τα παραδείγματα της παραγράφου αυτής θα μπορούσαν να χρησιμοποιηθούν ως βοήθημα σε μια τέτοια διαδικασία. Στο στατιστικό διάγραμμα της KaMeWa (σχήμα 6.18) μπορεί να γίνει μία εκτίμηση του βαθμού απόδοσης πρόωσης ώστε να είναι δυνατός ένας προκαταρκτικός υπολογισμός της απαιτούμενης ισχύος.
KNOTS
PROPULSIVE EFF`YPE/PD
5 10 15 20 25 30 35 40 45 50 55 600,200,250,300,350,400,450,500,550,600,650,700,750,80
MDV 3000-145 M ON 2 JETSMDV 3000-145 M ON 4 JETSSTENA HSS - 120 MKATTEGAT-95 MCORSAIR 1100CORFERR - 102 MMESTRAL-96 MFPB - 57 M ON 1FPB - 57 M 0N 2FPB - 57 M ON 3AQUASTRADA - 102 M ON 2 JETSAQUASTRADA - 102 M ON 3 JETSDESTRIERO - 67 M ON 3
KAMEWA WATER JET PROPULSION
Σχήμα 6.18. Βαθμός απόδοσης πρόωσης waterjet συναρτήσει της ταχύτητας του πλοίου.
35
7. Σύγκριση waterjet-έλικας 7.1. Ως προς τον βαθμό απόδοσης Τα δημοσιευμένα στοιχεία, για τον β.α. των waterjets από μετρήσεις σε εγκατεστημένα συστήματα, είναι λίγα και σε ορισμένες περιπτώσεις αμφισβητήσιμα. Παρ’ όλα αυτά στις υψηλές ταχύτητες φαίνεται ότι ο P.C. που επιτυγχάνεται είναι συγκρίσιμος με αυτό των ελίκων. Στις χαμηλές ταχύτητες (<25 knots) ο β.α. τους είναι αρκετά χειρότερος από των ελίκων και χρησιμοποιούνται μόνο σε ειδικές εφαρμογές. O β.α. των waterjets φαίνεται να μην είναι ιδιαίτερα υψηλός. Στην πράξη όμως λόγω του ότι τα φαινόμενα αλληλεπίδρασης με το πλοίο είναι ευνοϊκά επιτυγχάνονται αρκετά υψηλές τιμές για τον P.C. Τα waterjets δεν έχουν προεξέχοντα μέρη από το πλοίο, οπότε απουσιάζει η αντίσταση παρελκομένων, η οποία στην περίπτωση των ελίκων μπορεί να φτάσει το 5%-10% της αντίστασης του πλοίου. Σε πολλά ταχύπλοα το βύθισμα είναι αρκετά περιορισμένο, ενώ λόγω της υψηλής τους ταχύτητας η απαιτούμενη ώση είναι μεγάλη με αποτέλεσμα να μην μπορεί να τοποθετηθεί έλικα αρκετά μεγάλη σε διάμετρο ώστε να έχει ικανοποιητικό β.α. 7.2. Ως προς τις ελικτικές ικανότητες Τα waterjets μπορεί να παράγουν μεγάλη πλευρική ώση με μικρό αντίτιμο στην πρόσω ώση ανεξάρτητα της ταχύτητας τους. Ως εκ τούτου είναι δυνατό ένα πλοίο να πραγματοποιεί ελιγμούς ακόμα και σταματημένο. Η παραγόμενη ανάστροφη ώση είναι επίσης πολύ μεγάλη. Είναι δυνατό από μεγάλη ταχύτητα να γίνει χειρισμός αναστροφής άμεσα με πλήρη ισχύ!. 7.3. Ως προς την εκμετάλλευση της ισχύος του κινητήρα στις διάφορες
καταστάσεις λειτουργίας: Τα waterjets απορροφούν περίπου σταθερή ισχύ για σταθερές στροφές λειτουργίας τους ανεξάρτητα με την ταχύτητα του πλοίου, σε αντίθεση με την έλικα Επίσης με συνδυασμό περισσότερων της μίας μονάδων waterjet μπορεί να επιτευχθεί καλός βαθμός απόδοσης σε δύο ή περισσότερα σημεία λειτουργίας που να διαφέρουν σημαντικά. Μειώνεται έτσι ο κίνδυνος υπερφόρτωσης του κινητήρα και το απαραίτητο περιθώριο ισχύος του. 7.4. Ως προς τον θόρυβο: Ο θόρυβος στο εσωτερικό του πλοίου μειώνεται περίπου στο μισό (περίπου 10 db) σε σχέση με την έλικα, βελτιώνοντας την άνεση των επιβατών. Στο εξωτερικό του πλοίου μειώνεται επίσης περίπου στο μισό (και πάλι σε σχέση με την έλικα), γεγονός που αποτελεί πλεονέκτημα για τα πολεμικά πλοία. Δεν δημιουργεί κραδασμούς στη γάστρα. 7.5. Ως προς τα λοιπά χαρακτηριστικά: Τα waterjets είναι κατάλληλα για πλοία που πλέουν σε ρηχά νερά (π.χ. αποβατικά) λόγω της έλλειψης προεξοχών. Καταλαμβάνοντας χώρο στο εσωτερικό του πλοίου μειώνουν τον εκμεταλλεύσιμο όγκο (ή αυξάνουν τις διαστάσεις του πλοίου για δεδομένο όγκο). Υπάρχει ο κίνδυνος αναρρόφησης αέρα από την εισαγωγή, με αποτέλεσμα την καταπόνηση του κινητήρα και του waterjet. Όσον αφορά το βάρος το ποιο σύστημα πλεονεκτεί εξαρτάται από την περίπτωση.
36
7.6. Συμπεράσματα Η απόφαση για την επιλογή έλικας ή συστήματος πρόωσης με ανάδραση είναι δύσκολη κυρίως για ταχύτητες υπηρεσίας 20-30 kt, όπου οι κοινές έλικες αρχίζουν να αντιμετωπίζουν πρόβλημα σπηλαίωσης, ενώ τα waterjets δεν έχουν και τόσο καλό βαθμό απόδοσης. Φυσικά πρέπει να ληφθούν υπ’ όψιν και άλλα κριτήρια όπως ελικτικές ικανότητες, θόρυβος, κόστος, βάρος κλπ. Στις μεγαλύτερες ταχύτητες τα waterjets είναι ιδιαίτερα αποδοτικά ακόμα και συγκρίσιμα με τις υπερσπηλαιούμενες έλικες, ενώ στις μικρές ταχύτητες χρησιμοποιούνται σε ειδικές συνήθως εφαρμογές. 8. Τεχνολογικό επίπεδο των waterjets Το επίπεδο εξέλιξης των waterjets μπορεί να μελετηθεί εξετάζοντας τρεις περιοχές ενδιαφέροντος:
• τα συστήματα που διατίθενται στην αγορά ή βρίσκονται υπό εξέλιξη, • τα πλοία που διαθέτουν σύστημα πρόωσης με waterjet, • την έρευνα που διεξάγεται.
Οι κατασκευάστριες εταιρίες μεγάλων μονάδων πρόωσης με ανάδραση είναι δύο, η KaMeWa και η LIPS. Οι δύο αυτές εταιρίες διαθέτουν στην αγορά μοντέλα που μπορούν να απορροφήσουν ισχύ έως και 22.000 KW, ενώ η KaMeWa εξελίσσει για τα υπό σχεδίαση containerships της ‘Fastship America’ μία μονάδα που θα απορροφά ισχύ περίπου 50.000 KW. Υπάρχουν ακόμα αρκετές εταιρίες που κατασκευάζουν μικρότερα waterjets ισχύος έως 5000 KW. Ο βαθμός απόδοσης των σύγχρονων waterjets φαίνεται να ξεπερνάει το 70% για ταχύτητες άνω των 40 kt. Ο αριθμός των πλοίων που προωθούνται από waterjets είναι αρκετά μεγάλος. Τα περισσότερα από αυτά είναι ταχύπλοα Ε/Ο και στις εικόνες 8.1-8.7 φαίνεται ένα χαρακτηριστικό δείγμα. Αξίζει να αναφερθούν τα HSS 1500-class και TAURUS με συνολική ισχύ κινητήρων 70000 και 68000 KW αντίστοιχα, ενώ τα TAURUS και Aquastrada φέρουν το μοντέλο ‘KaMeWa 180’ το οποίο είναι το μεγαλύτερο waterjet σε υπηρεσία αυτή την στιγμή. Φορτηγά πλοία με waterjet δεν υπάρχουν ακόμη πολλά. Στην εικόνα 8.8 μπορεί κανείς να δει μία εμπορική έκδοση πλοίου της ‘INCAT’. Υπό εξέλιξη είναι τα containerships της Fastship America τα οποία υπολογίζεται ότι θα έχουν μεταφορική ικανότητα 1432 TEU, υπηρεσιακή ταχύτητα 38 kt και συνολική ισχύ που θα ξεπερνάει τα 200.000 KW. Στις εικόνες 8.10-8.12 φαίνονται μερικά παραδείγματα πολεμικών σκαφών διαφόρων τύπων. Στην εικόνα 8.13 φαίνεται ένα ιδιαίτερα πετυχημένο σκάφος αναψυχής. Τέλος στην εικόνα 8.14 φαίνεται το DESTRIERO το οποίο κατέχει το ρεκόρ ταχύτητας διάπλου του Ατλαντικού. Στον πίνακα 1 που ακολουθεί αναφέρονται τα κύρια χαρακτηριστικά των πλοίων που φαίνονται στις εικόνες. Το ‘waterjet’ ως σχετικά «νεαρό σε ηλικία» σύστημα πρόωσης παρουσιάζει σειρά από προβλήματα των οποίων η επίλυση απασχολεί τις εταιρίες κατασκευής τους. Η έρευνα επικεντρώνεται στους ακόλουθους τομείς:
• Σχεδίαση εισαγωγής με λιγότερες απώλειες. • Σχεδίαση πτερωτών με μεγαλύτερη αντοχή στη σπηλαίωση, ώστε να γίνει δυνατή
μείωση του μεγέθους και του βάρους τους. • Τυποποίηση πειραμάτων αυτοπρόωσης και διερεύνηση της περίπλοκης
αλληλεπίδρασης waterjet-πλοίου, ώστε να γίνει δυνατή η αξιόπιστη πρόβλεψη της συμπεριφοράς του πραγματικού πλοίου από πειράματα σε μοντέλο.
37
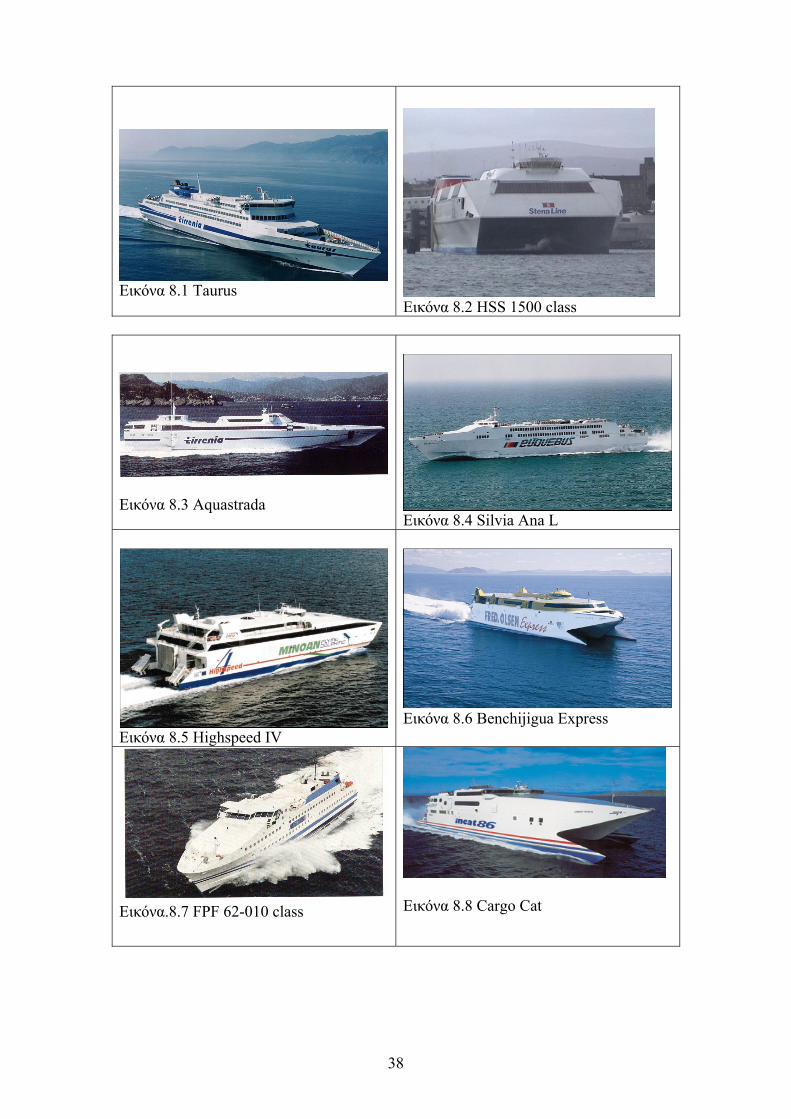
Εικόνα 8.1 Taurus
Εικόνα 8.2 HSS 1500 class
Εικόνα 8.3 Aquastrada
Εικόνα 8.4 Silvia Ana L
Εικόνα 8.5 Highspeed IV
Εικόνα 8.6 Benchijigua Express
Εικόνα.8.7 FPF 62-010 class
Εικόνα 8.8 Cargo Cat
38
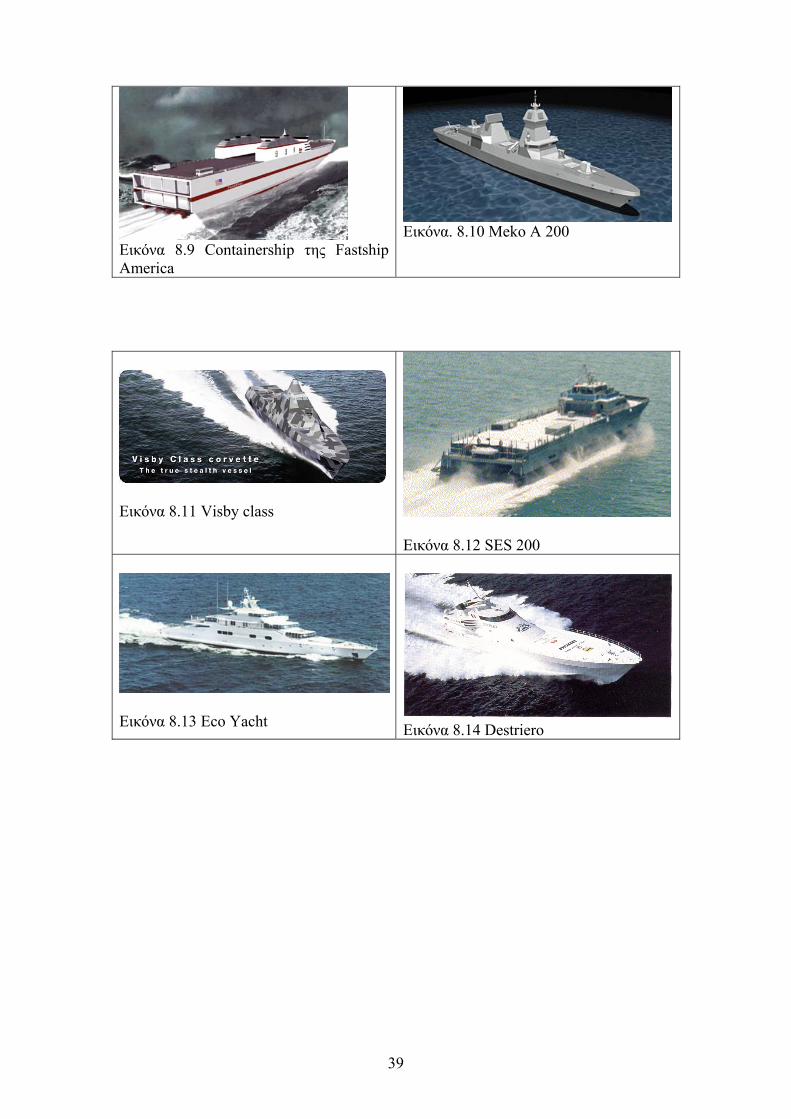
Εικόνα 8.9 Containership της Fastship America
Εικόνα. 8.10 Meko A 200
Εικόνα 8.11 Visby class
Εικόνα 8.12 SES 200
Εικόνα 8.13 Eco Yacht
Εικόνα 8.14 Destriero
39
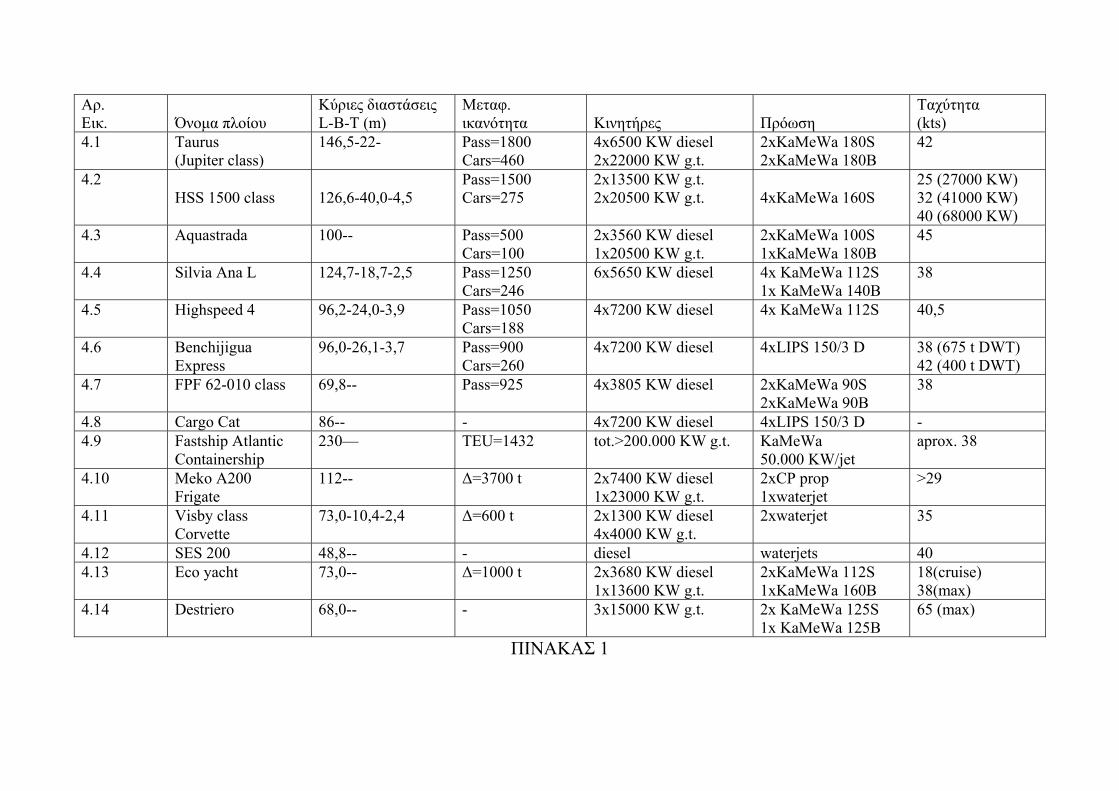
Αρ. Εικ.
Όνομα πλοίου
Κύριες διαστάσεις L-B-T (m)
Μεταφ. ικανότητα
Κινητήρες
Πρόωση
Ταχύτητα (kts)
4.1 Taurus (Jupiter class)
146,5-22- Pass=1800 Cars=460
4x6500 KW diesel 2x22000 KW g.t.
2xKaMeWa 180S 2xKaMeWa 180B
42
4.2 HSS 1500 class
126,6-40,0-4,5
Pass=1500 Cars=275
2x13500 KW g.t. 2x20500 KW g.t.
4xKaMeWa 160S
25 (27000 KW) 32 (41000 KW) 40 (68000 KW)
4.3 Aquastrada 100-- Pass=500 Cars=100
2x3560 KW diesel 1x20500 KW g.t.
2xKaMeWa 100S 1xKaMeWa 180B
45
4.4 Silvia Ana L 124,7-18,7-2,5 Pass=1250 Cars=246
6x5650 KW diesel 4x KaMeWa 112S 1x KaMeWa 140B
38
4.5 Highspeed 4
96,2-24,0-3,9 Pass=1050 Cars=188
4x7200 KW diesel 4x KaMeWa 112S 40,5
4.6 Benchijigua Express
96,0-26,1-3,7 Pass=900 Cars=260
4x7200 KW diesel 4xLIPS 150/3 D 38 (675 t DWT) 42 (400 t DWT)
4.7 FPF 62-010 class 69,8-- Pass=925 4x3805 KW diesel 2xKaMeWa 90S 2xKaMeWa 90B
38
4.8 Cargo Cat 86-- - 4x7200 KW diesel 4xLIPS 150/3 D - 4.9 Fastship Atlantic
Containership 230—
TEU=1432 tot.>200.000 KW g.t. KaMeWa 50.000 KW/jet
aprox. 38
4.10 Meko A200 Frigate
112-- Δ=3700 t 2x7400 KW diesel 1x23000 KW g.t.
2xCP prop 1xwaterjet
>29
4.11 Visby class Corvette
73,0-10,4-2,4 Δ=600 t 2x1300 KW diesel 4x4000 KW g.t.
2xwaterjet 35
4.12 SES 200 48,8-- - diesel waterjets 40 4.13 Eco yacht 73,0-- Δ=1000 t 2x3680 KW diesel
1x13600 KW g.t. 2xKaMeWa 112S 1xKaMeWa 160B
18(cruise) 38(max)
4.14 Destriero 68,0-- - 3x15000 KW g.t. 2x KaMeWa 125S 1x KaMeWa 125B
65 (max)
ΠΙΝΑΚΑΣ 1
9. Βιβλιογραφία 1. Α. Χρήστου, ‘Εισαγωγή στα συστήματα πρόωσης με waterjet’, Διπλωματική εργασία,
ΕΜΠ, 2002. 2. Lewis E.V. (editor), ‘Principles of naval Architecture – Volume II’, published by the
society of Naval Architects and Marine Engineers, 1988. 3. Διάφορες θέσεις με υλικό από το διαδίκτυο.
ΕΘΝΙΚΟ ΜΕΤΣΟΒΙΟ ΠΟΛΥΤΕΧΝΕΙΟ
ΤΜΗΜΑ ΝΑΥΠΗΓΩΝ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ
ΜΑΘΗΜΑ: ΕΙΔΙΚΑ ΘΕΜΑΤΑ ΠΡΟΩΣΗΣ ΠΛΟΙΟΥ
ΜΑΓΝΗΤΟ-ΥΔΡΟΔΥΝΑΜΙΚΗ ΠΡΟΩΣΗ
Γ. Κ. ΠΟΛΙΤΗ, Αναπληρωτή Καθηγητή Επιμέλεια:
Φωτεινή Α. Σκαμνέλη Ναυπηγού Μηχανολόγου Μηχανικού ΕΜΠ
ΑΘΗΝΑ, ΙΟΥΝΙΟΣ 2004

Μαγνητοϋδροδυναμική Πρόωση (Magnetohydrodynamic (MHD) Propulsion) Α. Ιστορικά Ο όρος Μαγνητοϋδροδυναμική (ΜΥΔ) αναφέρεται στην μελέτη της κίνησης των ηλεκτρικά αγώγιμων υγρών και αερίων παρουσία μαγνητικού πεδίου. Αυτή η μελέτη έχει τις ρίζες της σε ένα πείραμα του Michael Faraday κατά το 1831 πάνω στη ροή του υδραργύρου μέσα σε μαγνητικό πεδίο, το οποίο δεν ήταν επιτυχές. Εν συνεχεία, στις αρχές της δεκαετίας του 1930, οι Sydney Chapman και V.C.A. Ferraro εργάστηκαν πάνω στις μαγνητικές θύελλες που συμβαίνουν στην ατμόσφαιρα της γης ως αποτέλεσμα μεταβολών της ηλιακής δραστηριότητας ενώ το 1940, ο Σουηδός Αστροφυσικός Hannes Alven μελέτησε σε μεγαλύτερη λεπτομέρεια την συμπεριφορά κινούμενων ιόντων σε μαγνητικό πεδίο. Η ιδέα της ηλεκτρομαγνητικής πρόωσης κατοχυρώθηκε στις ΗΠΑ από τον Rice, το 1961. Κατόπιν αυτού οι ΗΠΑ πρωτοστάτησαν στις σχετικές θεωρητικές και πειραματικές μελέτες με αποτέλεσμα μια έκθεση του Westinghouse Research Laboratory (1966), η οποία έδειξε ότι απαιτούντο ισχυρότερα μαγνητικά πεδία προτού η ιδέα του Rice γίνει μια ρεαλιστική προοπτική για την πρόωση των πλοίων. Στη δεκαετία του 1970 τα υπεραγώγιμα πηνία έδωσαν ώθηση στις σχετικές προσπάθειες ενώ κατά τη δεκαετία του 1980 οι ΗΠΑ, η Σοβιετική Ένωση και η Ιαπωνία είχαν προγράμματα ΜΥΔ πρόωσης εν εξελίξει. Επακολούθησε όμως η διάσπαση της Σοβιετικής Ένωσης και έκτοτε η Ιαπωνία έπαιξε τον σημαντικότερο ρόλο καθελκύοντας μάλιστα ένα μικρό πλοίο, το Yamato 1 (εικόνα 1), το οποίο προωθείται μαγνητοϋδροδυναμικά από μονάδες όπως αυτή που φαίνεται στο σχήμα 2b. Β. Αρχή στην οποία στηρίζεται η ΜΥΔ πρόωση – Τύποι ΜΥΔ πρόωσης Η αρχή της ΜΥΔ πρόωσης είναι η αλληλεπίδραση μεταξύ ενός σταθερού μαγνήτη – πηνίου τοποθετημένου στο εσωτερικό του πλοίου (το οποίο πρέπει να είναι κατασκευασμένο από μη μαγνητικό υλικό, όπως αλουμίνιο ή ανοξείδωτο χάλυβα) με το ηλεκτρικό ρεύμα που διέρχεται από το θαλασσινό νερό μέσω δύο ηλεκτροδίων συμμετρικά τοποθετημένων στο κάτω μέρος της γάστρας (σχήμα 1). Με το διάνυσμα της έντασης του μαγνητικού πεδίου να έχει διεύθυνση κάθετη σε εκείνη του ηλεκτρικού ρεύματος, το αποτέλεσμα είναι μία δύναμη που ασκείται στο θαλασσινό νερό κατά τη διεύθυνση του διαμήκους άξονα συμμετρίας του πλοίου (σχήμα 1). Σύμφωνα με το νόμο δράσης – αντίδρασης μια ίση και αντίθετη δύναμη ασκείται τότε στον μαγνήτη, και καθώς αυτός είναι σταθερός σε σχέση με τη γάστρα, το πλοίο τελικά προωθείται. Ο παραπάνω τύπος ΜΥΔ πρόωσης ονομάζεται εξωτερικού μαγνητικού πεδίου. Ο εναλλακτικός τύπος, εσωτερικού μαγνητικού πεδίου, αποτελείται από μία διάταξη που φαίνεται στο σχήμα 2α. Εδώ η ηλεκτρομαγνητική δύναμη ασκείται στο θαλασσινό νερό εντός δακτυλίου ο οποίος βρίσκεται μέσα στη γάστρα, όπως στην περίπτωση της πρόωσης με water – jet. Γύρω από το δακτύλιο υπάρχουν οι μαγνήτες – πηνία από υπεραγώγιμα (superconducting) υλικά, οι οποίοι περιβάλλονται από ψυκτικό μέσο. Τα ηλεκτρόδια είναι τοποθετημένα μέσα στον δακτύλιο. Η ΜΥΔ πρόωση εξωτερικού μαγνητικού πεδίου έχει το πλεονέκτημα της απλούστερης διάταξης αλλά τα μειονεκτήματά της είναι πολύ σοβαρά. Το ηλεκτρομαγνητικό πεδίο που δημιουργείται γύρω από τη γάστρα μπορεί να επηρεάσει
2
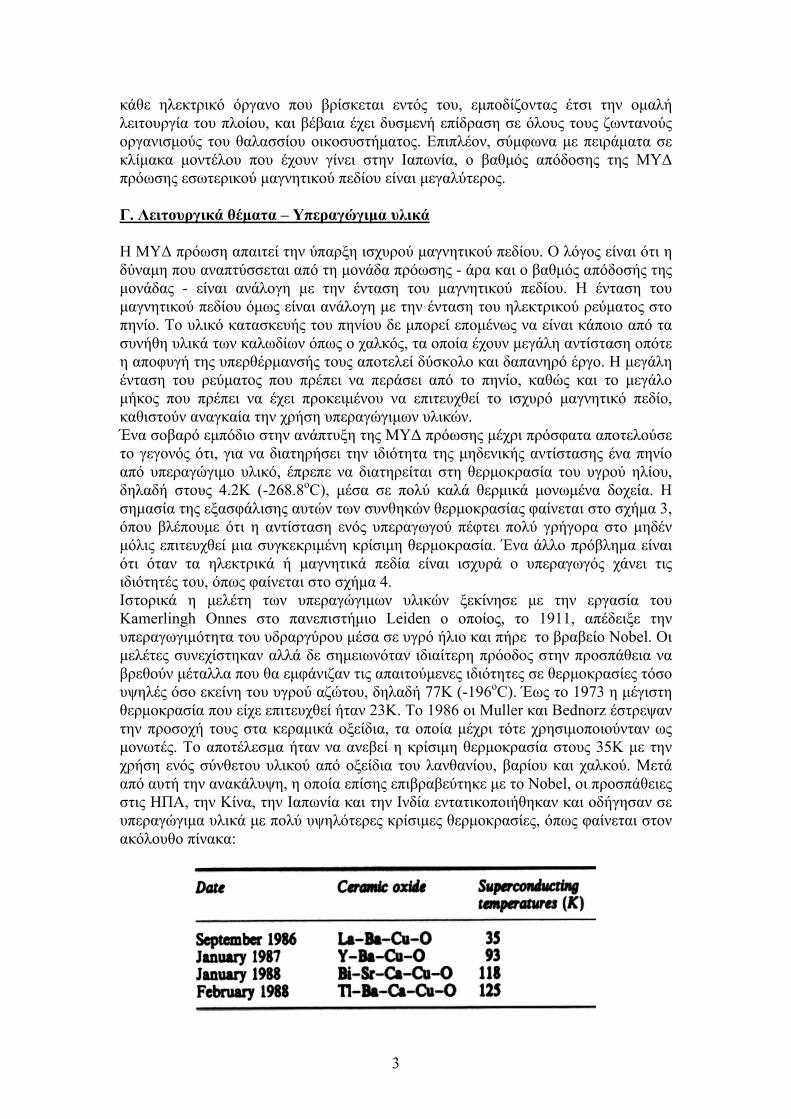
κάθε ηλεκτρικό όργανο που βρίσκεται εντός του, εμποδίζοντας έτσι την ομαλή λειτουργία του πλοίου, και βέβαια έχει δυσμενή επίδραση σε όλους τους ζωντανούς οργανισμούς του θαλασσίου οικοσυστήματος. Επιπλέον, σύμφωνα με πειράματα σε κλίμακα μοντέλου που έχουν γίνει στην Ιαπωνία, ο βαθμός απόδοσης της ΜΥΔ πρόωσης εσωτερικού μαγνητικού πεδίου είναι μεγαλύτερος. Γ. Λειτουργικά θέματα – Υπεραγώγιμα υλικά Η ΜΥΔ πρόωση απαιτεί την ύπαρξη ισχυρού μαγνητικού πεδίου. Ο λόγος είναι ότι η δύναμη που αναπτύσσεται από τη μονάδα πρόωσης - άρα και ο βαθμός απόδοσής της μονάδας - είναι ανάλογη με την ένταση του μαγνητικού πεδίου. Η ένταση του μαγνητικού πεδίου όμως είναι ανάλογη με την ένταση του ηλεκτρικού ρεύματος στο πηνίο. Το υλικό κατασκευής του πηνίου δε μπορεί επομένως να είναι κάποιο από τα συνήθη υλικά των καλωδίων όπως ο χαλκός, τα οποία έχουν μεγάλη αντίσταση οπότε η αποφυγή της υπερθέρμανσής τους αποτελεί δύσκολο και δαπανηρό έργο. Η μεγάλη ένταση του ρεύματος που πρέπει να περάσει από το πηνίο, καθώς και το μεγάλο μήκος που πρέπει να έχει προκειμένου να επιτευχθεί το ισχυρό μαγνητικό πεδίο, καθιστούν αναγκαία την χρήση υπεραγώγιμων υλικών. Ένα σοβαρό εμπόδιο στην ανάπτυξη της ΜΥΔ πρόωσης μέχρι πρόσφατα αποτελούσε το γεγονός ότι, για να διατηρήσει την ιδιότητα της μηδενικής αντίστασης ένα πηνίο από υπεραγώγιμο υλικό, έπρεπε να διατηρείται στη θερμοκρασία του υγρού ηλίου, δηλαδή στους 4.2Κ (-268.8οC), μέσα σε πολύ καλά θερμικά μονωμένα δοχεία. Η σημασία της εξασφάλισης αυτών των συνθηκών θερμοκρασίας φαίνεται στο σχήμα 3, όπου βλέπουμε ότι η αντίσταση ενός υπεραγωγού πέφτει πολύ γρήγορα στο μηδέν μόλις επιτευχθεί μια συγκεκριμένη κρίσιμη θερμοκρασία. Ένα άλλο πρόβλημα είναι ότι όταν τα ηλεκτρικά ή μαγνητικά πεδία είναι ισχυρά ο υπεραγωγός χάνει τις ιδιότητές του, όπως φαίνεται στο σχήμα 4. Ιστορικά η μελέτη των υπεραγώγιμων υλικών ξεκίνησε με την εργασία του Kamerlingh Onnes στο πανεπιστήμιο Leiden ο οποίος, το 1911, απέδειξε την υπεραγωγιμότητα του υδραργύρου μέσα σε υγρό ήλιο και πήρε το βραβείο Nobel. Οι μελέτες συνεχίστηκαν αλλά δε σημειωνόταν ιδιαίτερη πρόοδος στην προσπάθεια να βρεθούν μέταλλα που θα εμφάνιζαν τις απαιτούμενες ιδιότητες σε θερμοκρασίες τόσο υψηλές όσο εκείνη του υγρού αζώτου, δηλαδή 77Κ (-196οC). Έως το 1973 η μέγιστη θερμοκρασία που είχε επιτευχθεί ήταν 23Κ. Το 1986 οι Muller και Bednorz έστρεψαν την προσοχή τους στα κεραμικά οξείδια, τα οποία μέχρι τότε χρησιμοποιούνταν ως μονωτές. Το αποτέλεσμα ήταν να ανεβεί η κρίσιμη θερμοκρασία στους 35Κ με την χρήση ενός σύνθετου υλικού από οξείδια του λανθανίου, βαρίου και χαλκού. Μετά από αυτή την ανακάλυψη, η οποία επίσης επιβραβεύτηκε με το Nobel, οι προσπάθειες στις ΗΠΑ, την Κίνα, την Ιαπωνία και την Ινδία εντατικοποιήθηκαν και οδήγησαν σε υπεραγώγιμα υλικά με πολύ υψηλότερες κρίσιμες θερμοκρασίες, όπως φαίνεται στον ακόλουθο πίνακα:
3
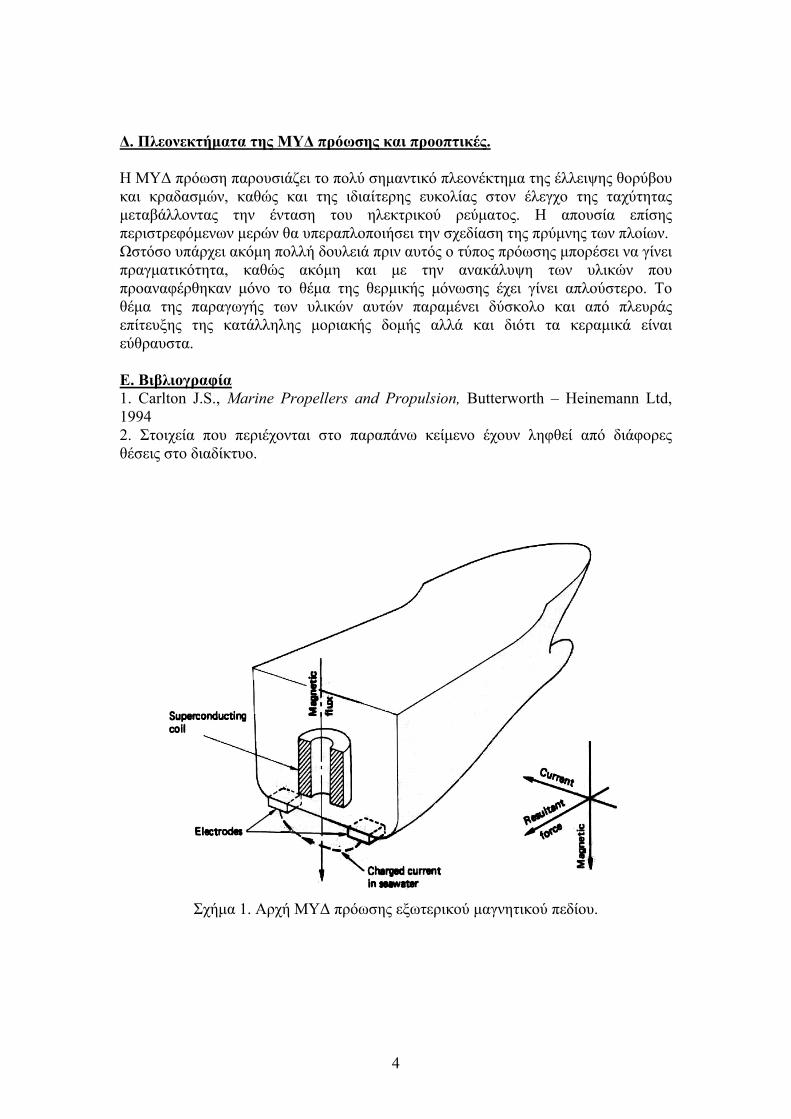
Δ. Πλεονεκτήματα της ΜΥΔ πρόωσης και προοπτικές. Η ΜΥΔ πρόωση παρουσιάζει το πολύ σημαντικό πλεονέκτημα της έλλειψης θορύβου και κραδασμών, καθώς και της ιδιαίτερης ευκολίας στον έλεγχο της ταχύτητας μεταβάλλοντας την ένταση του ηλεκτρικού ρεύματος. Η απουσία επίσης περιστρεφόμενων μερών θα υπεραπλοποιήσει την σχεδίαση της πρύμνης των πλοίων. Ωστόσο υπάρχει ακόμη πολλή δουλειά πριν αυτός ο τύπος πρόωσης μπορέσει να γίνει πραγματικότητα, καθώς ακόμη και με την ανακάλυψη των υλικών που προαναφέρθηκαν μόνο το θέμα της θερμικής μόνωσης έχει γίνει απλούστερο. Το θέμα της παραγωγής των υλικών αυτών παραμένει δύσκολο και από πλευράς επίτευξης της κατάλληλης μοριακής δομής αλλά και διότι τα κεραμικά είναι εύθραυστα. Ε. Βιβλιογραφία 1. Carlton J.S., Marine Propellers and Propulsion, Butterworth – Heinemann Ltd, 1994 2. Στοιχεία που περιέχονται στο παραπάνω κείμενο έχουν ληφθεί από διάφορες θέσεις στο διαδίκτυο.
Σχήμα 1. Αρχή ΜΥΔ πρόωσης εξωτερικού μαγνητικού πεδίου.
4
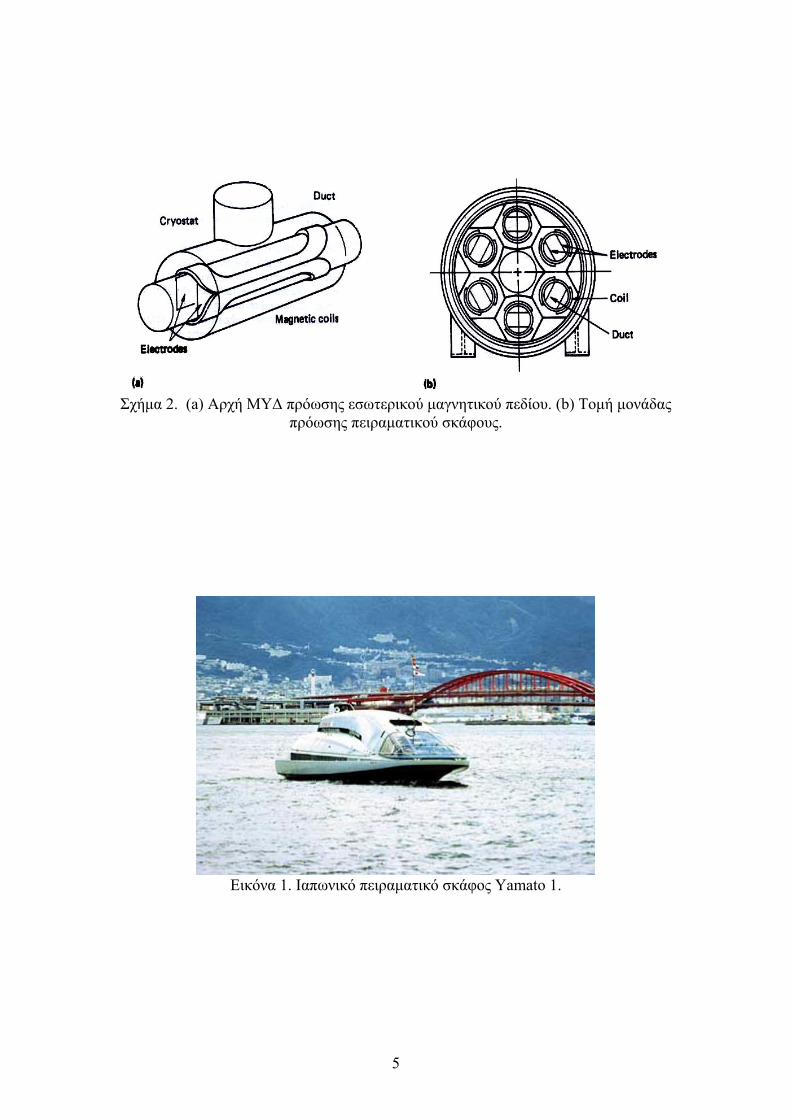
Σχήμα 2. (a) Αρχή ΜΥΔ πρόωσης εσωτερικού μαγνητικού πεδίου. (b) Τομή μονάδας
πρόωσης πειραματικού σκάφους.
Εικόνα 1. Ιαπωνικό πειραματικό σκάφος Yamato 1.
5
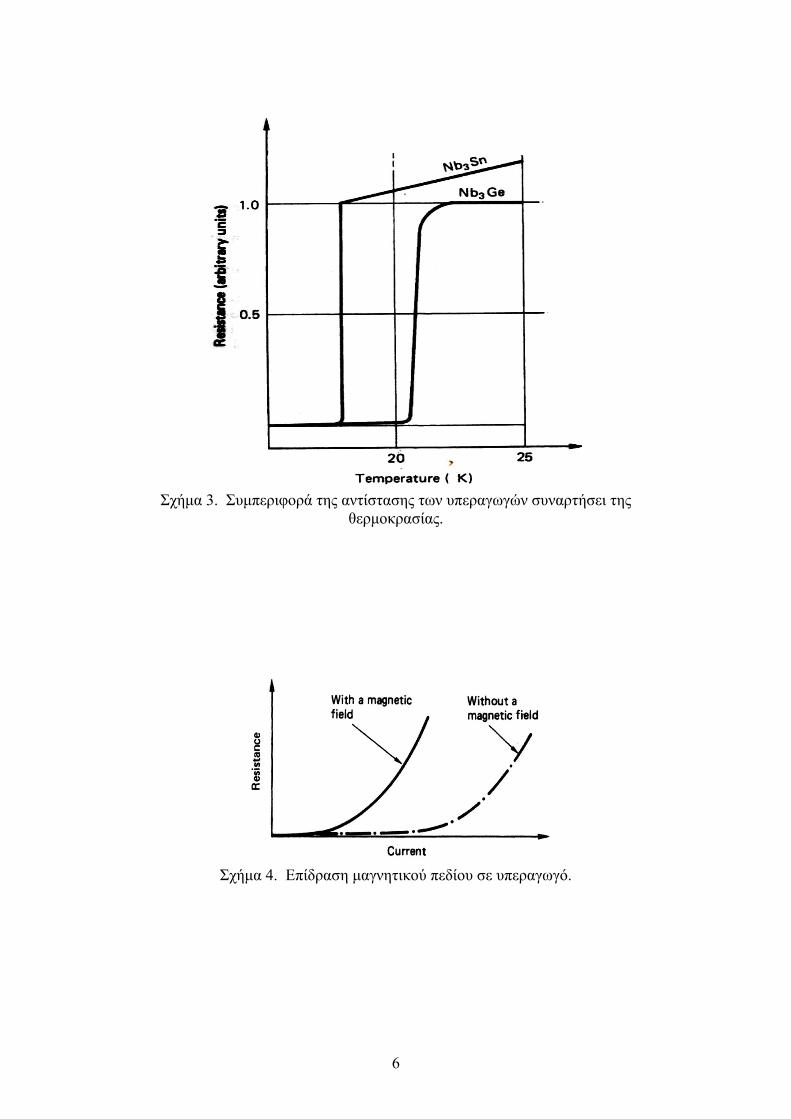
Σχήμα 3. Συμπεριφορά της αντίστασης των υπεραγωγών συναρτήσει της
θερμοκρασίας.
Σχήμα 4. Επίδραση μαγνητικού πεδίου σε υπεραγωγό.
6