Service Data Servo Valves Single Ended Linear DC Servo ... · Single Ended Linear DC Servo...
6
Revised 09/01/87 I-3081-S Single Ended Linear DC Servo Amplifier EM-A-10 Vickers ® Servo Valves Service Data
Transcript of Service Data Servo Valves Single Ended Linear DC Servo ... · Single Ended Linear DC Servo...

Revised 09/01/87 I-3081-S
Single Ended Linear DC Servo AmplifierEM-A-10
Vickers®
Servo ValvesService Data

B. Specifications
Input Impedance Min. Typ. Max. Units
45
Input Signal LevelGain: Continuously
Adjustable: Input 5Input 4
OutputOutput Current
20 Ω loadOutput current limitsDither current adjustableOutput drift at max. gainDuring warm-up (30 min.) vs. temperature vs. time (after 30 min.) vs. supply voltage
4.9549.5–100
20.20
20–203
Frequency Response DC - 300 Hz max. gain full load
Single ended with respect to common
5500
200
5.0550.5+100
202
400500100
301101
–3
KΩKΩ
V-peak
Amps/voltAmps/volt
MAMAMAp-p
MAMA/FMA/24 hrs.MA
DB
Regulated OutputSupply into 500 Ohm load
Pin 7 to commonPin 8 to common
Temperature RangeOperatingStorage
Power Supply Req’mntVoltage Range
+9–9
–29–40
+14–14
+10–10
+19–19
+11–11
+71+85
+20–20
VdcVdc
CC
VdcVdc
Mechanical SpecsModuleModule SizeModule WeightControls
Special printed circuit card5.0” x 3.5” x 1.0”8 ox.Screwdriver adjustedDitherGain
Table 1. Electrical and Mechanical Specifications for the EM-A-10.
General
This manual is written primarily to establish a logical trouble-shooting procedure for the solid state EM (electronic modular)amplifier. Complete systems are beyond the scope of this manualand will not be covered. Adequate information is presented for anElectrical Technician to repair the EM-A-10 amplifier.
EM-A-10 (308118) Linear Servo AmplifierA. Description
The EM-A-10 is a special purpose DC servo amplifier designedspecifically for a Vickers SE3 or SF4 flapper type servo valve.The EM-A-10 consists of a high gain summing amplifier, a lowgain DC amplifier and a power output stage.
The amplifier module also contains a 10 volt regulated powersupply which may be used for development of input signalsthrough an external 5000 ohm potentiometer.
The complete amplifier and power supply are contained on aplug-in module whose approximate dimensions are 3-1/2 x 5inches. Refer to table 1 for electrical and mechanicalspecifications.
C. Installation
The EM-A-10 servo amplifier is designed for mountingon a power supply plate such as the EMP-A-11. Inputand output connections to the amplifier circuitry areprovided by printed circuit pin connections on themodule. These pin connections, when installed into aplug-in receptacle, must be connected as shown in Table2. TB2 wiring interconnections, located on the EMP-A-11power supply plate, are shown for convenience.
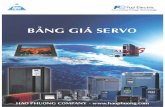
Portions of the EM–A-10 servo amplifier are of theincapsulated construction and must be replaced ascomplete assemblies. Amplifier A1 and A2 shown on theschematic diagram Figure 1 are examples of this type ofconstruction. Replacement of A1 and A2 require factoryadjustments to be performed to the resistance valuesdesignated by an asterisk (*). Therefore, shouldreplacement of either amplifier be required, it isrecommended that the installation be accomplished byVickers. Replacement EM-A-10 amplifiers are available.
EMP-A-11TB2(J)A(J)B(J)C
Plug-inreceptacle
pinconn’tions
Plug-inmodule
pinconn’tions
Signal
–––45678––12––
3
abcdefhjklmnpr
s
1234567891011121314
15
Dither (13 Vac)N.C–19 Vdc inputInput #1Input #2Summing JunctionRegulated +DC outputRegulated –DC outputN.C.N.C.Negative output to coilPositive output to coil+19 Vdc inputSlotted for polarizingkeyCommon
Table 2. The EM-A-10 Plug-in Receptacle andTerminal Board Interconnecting Wiring
D. Circuit Description
Amplifier Section - The EM-A-10 is a DC amplifier,consisting of a high gain summing pre-amplifier feeding aunity gain buffer amplifier which drives a power outputstage.
The output stage is statically adjusted to produce 200Milliamperes (MA) of current through the 20Ω servovalve coil. (Vickers type SE3/SF4 servo valve) and variesfrom this 200 MA value with variations in input signal.
An explanation of the circuitry follows: Refer to thepictorial diagram, Figure 1, the simplified schematicdiagram Figure 2, and the complete schematic diagramschematic diagram Figure 3.

Command and feedback signals are connected through R1 andR2 to the input of amplifier A1. Resistors R1, R2, and amplifierA1’s input resistance form a summing network which permits adifference potential to be developed across amplifier A1’s inputresistance. The amplitude of this potential is determined by thepolarity and amplitude of the input signals, the input couplingresistance R1 and R2, and the input resistance of amplifier A1.Under normal operating conditions, the junction of R1 and R2is maintained at ‘‘virtual ground’’ within a few millivolts by A1.Diodes D8 and D9 limit amplitude extremes at the input of A1to approximately .5 volt minimum, if the amplifier outputsaturates. Amplifier A1 inverts the output signal with respect tothe input signal, permitting gain adjustment to be obtained by anegative feedback arrangement through resistors R3 and R4.A portion of the inverted output is allowed to develop acrossthe input resistance of amplifier A1. This negative feedbacksubtracts from the input signal subsequently reducing the gainof the amplifier.
The output of A1 is used to drive amplifier A2 which in turn pro-vides the current necessary to drive power transistor Q5 andQ6. (Shown on the complete schematic diagram Figure 1).
Amplifiers A1 and A2 are of the same type. But amplifier A1’sgain differs from that of amplifier A2, due to wiring arrange-ment. Amplifier A1’s gain is essentially the ratio of feedbackto input resistance or:
A1 Gain - Input 1(Approx. gain of 2)
A1 Gain - Input 2(Approx. gain of 20)
=
=
R3 +
R1
R2
R4 R4a R4 + R4a
R3 +R4 R4a R4 + R4a
Amplifier A2 is connected to provide a non-inverting, unitygain amplifier characteristic. Unity gain amplifiers (gain of 1)provide isolation between circuits (buffer action) and will per-mit a source with low current capacity (A1) to drive a heavyload (Q5 and Q6).
Transistor Q5 and Q6 develop the necessary output currentfor the servo coil. Resistors R20 and R20a bias amplifier A2and establish the 200 MA null current through Q6, D6, theservo coil, and resistor R26 (the current sensing resistor).
A voltage is developed across R26 directly proportional to thecurrent through it. The voltage is reduced through voltagedivider action by R23 and R21, and is fed to pin two (2) of theunity gain amplifier A2 reducing its gain. This gain reduction(negative feedback) improves the linearity of the driver stageA2 and the output transistor circuit Q5 and Q6. R25a andR25b are adjusted to limit the maximum current. When thevoltage across R25a and R25b exceeds the threshold voltageof D4 and D5, the diodes conduct limiting a further currentrise in the output circuit.
Dither - The dither signal (60 to 400 Hertz) is connected to pin1 of the plug-in module. A variable resistive divider networkR16 and R18 provide adjustment of the value of the dither.The dither is applied to pin two (2) of amplifier A2 throughresistor R17. Dither signal is used to keep the servo flapper inconstant motion, thus preventing the flapper from magnetizingin a locked condition against the orifice. Constant motion ofthe flapper will also reduce the effect of silting (the particlebuild-up around the orifice).
Power Supplies - Four regulated power supplies areprovided on the plug-in module. Refer to the schematicdiagram figure 1. The amplifier section utilizes both apositive ten (+10) and a negative ten (–10) volt supply foroperation. A positive ten (+10) and a negative ten (–10)volt supply is also available for external use.
The externally connected supplies may be used foramplifier control circuitry if desired, thus providing thecontrol voltage and amplifiers necessary for a completesystem in one plug-in module.
All the regulated supplies operate in a similar manner,therefore, explanation of only one will be presented.
Upon application of negative nineteen (–19) volts DC topin 3 of the plug-in module, Zener Diode Z2 conductsthrough R7 establishing a regulated source voltage forthe base of Q2. A portion of this regulated voltage isapplied to Q2 through the voltage divider network of R9,D2, and R11. Diode D2 and resistor R11 shunt the baseresistance of Q2 and reduce the base drive as thetemperature rises. This reduction in drive preventsthermal runaway of transistor Q2. Emitter resistor R13swamps the emitter base junction resistance andprevents a large increase in emitter current, particularlyat low temperatures. Q2 and R13 act as a variablevoltage dropping resistor for Zener Diode Z4, andmaintain a constant current through Z4 with varying inputvoltages. The combined action of Q2 and Z4 provide aregulated -10 volt source at pin 8 of the plug-in module.
E. Troubleshooting Procedure
Determine if the EM-A-10 module is functional. Refer tothe schematic diagram figure 1 and the pictorial diagramFigure 2.
NoteThe EMP-A-11 power supply or its equivalent mustbe used to perform the following test. Minor wiringchanges may be required if an equivalent supply isused.
1. Remove electrical power from the system.
2. Remove the input signal connections 4, 5, 6, 7, and8. Tape the wire ends and symbolize to preventerror.
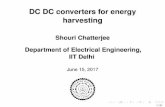
3. Connect a linear taper, 5000 ohm test potentiometeras shown in figure 4.
4. Remove the EM-A-10 plug-in module. Use the ohm-meter on the low ohm scale to check the resistanceof the load as follows:
Connect the ohmmeter between J* - m & n. A read-ing of approximately 20 ohms is considered normal.If the reading is normal, reinsert the plug-in moduleand proceed with the test.

Com
–D.C.
NoteThe characteristics of this amplifier are such that onceconduction starts, a very small change in input signal levelwill cause a very large change in output current. There-fore, the 5000 ohm command test potentiometer (shown infigure 4) will seem to have no effect on the measured out-put voltage level until the center of the control is reached,then the voltage level will change rapidly from 0 to –1.5volts. To obtain –0.6 volts (200 MA) reading, the controlmust be varied very slowly when the center of the controlis reached.
5. Connect a volt-ohmmeter between TB2*-2 and TB2*-3(common ground reference). Apply power and mea-sure for negative .6 volts (200 MA). The voltageshould vary from approximately zero (0) volts at oneend of the test potentiometer adjustment range toapproximately 1.5 volts at the other. If the amplifierperforms as indicated, it is operating normally.
6. Remove AC power from the system.
7. Connect symbolized wiring removed in step E. 2.
12
11
65
7
4
8
3
21
3
8
15
7
13
1
2
5
4
6
– D C Supply In
R15R132.2KR11
Z2Q4
Q2D 2
2.7K
R71.5 K Z 4
Z 6
Z 5
Supply Out
R9
1.5 KR6
Supply Out2.7 K
R8
Z1
65
7
4
8
3
21
ALL RESISTORS + 5%, 1/4 WUNLESS OTHERWISE SPECIFIED
*FACTORY ADJUST
+D.C.
Z 4 R263Ω 3W
POSOUT
Q5
R24470 Ω
R23
3.3K
0.1 µf
C2
D3
D4
D5
R25b R25a
R252.0 Ω3W
Q 6
C5
Summing Junction
Sig. Input 1 R1
DITHER
50KSig. Input 2
DITHER
+ D.C. Supply In
+1%,5W R2
5K+1%5 W
R16
15K
R10 R12 R14
Q3
2.2K 220Ω
D1
Q1
D8 D9
A1
R17
22K
R271%1/10W
a
*
R3
10 K
R2
C4
.0068 µF
200K
R4 a
GAIN
R 4
470PF
R181 K
R20aR2082 K *
DITHER
R213.3K
A2NEGOUT
D 6
**
Figure 1. Complete Schematic Diagram for EM-A-10
68Ω
220Ω68Ω
b

Figure 2. Pictorial Diagram of the EM-A-10
Figure 3. Simplified Schematic Diagram of the EM-A-10
+10 Vdc
R1622K
R1722K
DITHERR181K*R20a
R20 82K50KR1
R25K
A1A2
R213.3K
10/1 INV.
4
5
R4
200K
R3
10K
R233.3K
12
15
R263 Ω
Load
11
*Factory Adjust

EMP-A-11TB2-*
Load Neg. Out
Load Pos. Out
Volt-Ohm Meter (VOM)
Servo Coil
20Ω
Remove signalwiring atterminals 4 & 5.
Symbolize the wires removed to prevent error.
Common ground
Input signal
Test Potentiometer
5000 Ohm LinearPotentiometer
Note
If the EMP-A-11 power supply is not used,connect the power source as shown totest the EM-A-11 amplifier.
Figure 4. Test Potentiometer Wiring Diagram
1
2
3
4
5
6
7
8
+DC
–DC