S-72.1110 2007 Luento7...2 22.11.2007 3 LTI-järjestelmät • Sijoittamalla heräte sekä arvattu...
23
1 22.11.2007 1 Luento 7 • Lineaaristen järjestelmien analyysi taajuustasossa – Taajuusvaste – Stabiilisuus 22.11.2007 2 LTI-järjestelmät • Tarkastellaan lineaarista aikainvarianttia järjestelmää • Käytetään pyörivää osoitinta herätteenä ja arvataan, että vaste on muotoa h(t) u(t) y(t) 2 () i ft ut e π = 2 () ( ) i ft yt H fe π = 1 1 1 0 1 0 1 1 () () () () () ( ), n n m m n m m n n m m d d d d yt a yt ayt b ut b ut but n m dt dt dt dt − − − − − − =− − − + + + + ≥ " "
Transcript of S-72.1110 2007 Luento7...2 22.11.2007 3 LTI-järjestelmät • Sijoittamalla heräte sekä arvattu...

1
22.11.2007 1
Luento 7• Lineaaristen järjestelmien analyysi taajuustasossa
– Taajuusvaste– Stabiilisuus
22.11.2007 2
LTI-järjestelmät
• Tarkastellaan lineaarista aikainvarianttia järjestelmää
• Käytetään pyörivää osoitinta herätteenä
ja arvataan, että vaste on muotoa
h(t)u(t) y(t)
2( ) i ftu t e π=
2( ) ( ) i fty t H f e π=
1 1
1 0 1 01 1( ) ( ) ( ) ( ) ( ) ( ),n n m m
n m mn n m m
d d d dy t a y t a y t b u t b u t b u t n mdt dt dt dt
− −
− −− −= − − − + + + + ≥

2
22.11.2007 3
LTI-järjestelmät• Sijoittamalla heräte sekä arvattu vaste
differentiaaliyhtälöön saadaan
• Joten taajuudella f pyörivää osoitin generoi vasteeksi samalla taajuudella pyörivän osoittimen, jonka amplitudi ja vaihe ovat muuttuneet
( ) ( ) ( )1
2 2
0 02 2 ( ) 2
n mn l ki ft i ft
l kl k
i f a i f H f e b i f eπ ππ π π−
= =
⎛ ⎞+ =⎜ ⎟⎝ ⎠⇒
∑ ∑
2 2 arg ( )( ) ( ) ( )i ft i ft i H fy t H f e H f eπ π += =
( )
( ) ( )0
1
0
2( )
2 2
mk
kk
nn l
lk
b i fH f
i f a i f
π
π π
=−
=
=+
∑
∑
Siirtofunktio
22.11.2007 4
Taajuusvaste• Järjestelmän taajuusvaste saadaan syöttämällä sisään
eri taajuisia sini-muotoisia signaaleja ja katsomalla kuinka niiden amplitudi ja vaihe muuttuvat kulkiessaan järjestelmän läpi.
Lineaarinen järjestelmä ei aiheuta taajuuden muuntumista.
( ) ( )
( )
2 2
2 * 2
2 arg( ( )) 2 arg( ( ))
1( ) cos 22
1 1( ) ( ) ( )2 21 1( ) ( ) ( )2 2
( ) ( ) cos 2 arg ( )
i ft i ft
i ft i ft
i ft i H f i ft i H f
u t ft e e
y t H f e H f e
y t H f e H f e
y t H f ft H f
π π
π π
π π
π
π
−
−
+ − −
= = +
= +
= +
= +
3
22.11.2007 5
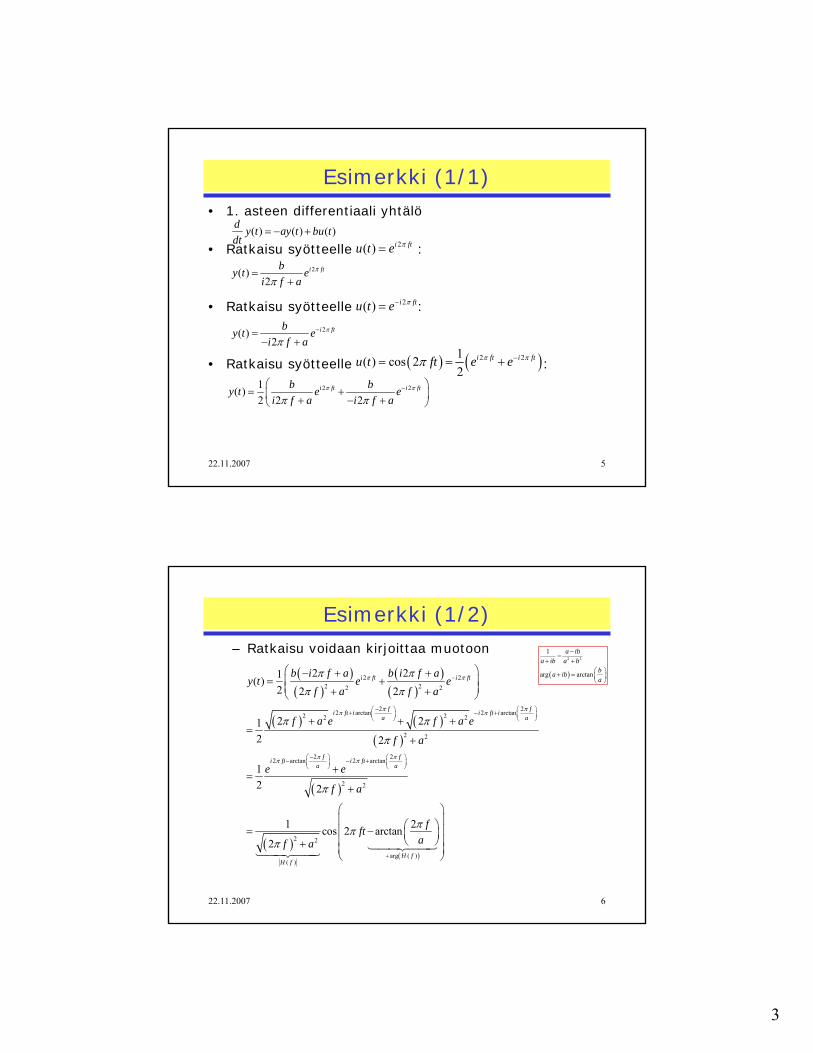
Esimerkki (1/1)• 1. asteen differentiaali yhtälö
• Ratkaisu syötteelle :
• Ratkaisu syötteelle :
• Ratkaisu syötteelle :
( ) ( ) ( )d y t ay t bu tdt
= − +2( ) i ftu t e π=
2( )2
i ftby t ei f a
π
π=
+
2( ) i ftu t e π−=
2( )2
i ftby t ei f a
π
π−=
− +
( ) ( )2 21( ) cos 22
i ft i ftu t ft e eπ ππ −= = +
2 21( )2 2 2
i ft i ftb by t e ei f a i f a
π π
π π−⎛ ⎞
= +⎜ ⎟+ − +⎝ ⎠
22.11.2007 6
Esimerkki (1/2)– Ratkaisu voidaan kirjoittaa muotoon
( )( )
( )( )
( ) ( )( )
( )
( )
2 22 22 2
2 22 arctan 2 arctan2 22 2
2 2
2 22 arctan 2 arctan
2 2
2
2 21( )2 2 2
2 212 2
12 2
1
2
i ft i ft
f fi ft i i ft ia a
f fi ft i fta a
b i f a b i f ay t e e
f a f a
f a e f a e
f a
e e
f a
f a
π π
π ππ π
π ππ π
π π
π π
π π
π
π
π
−
−⎛ ⎞ ⎛ ⎞+ − +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
−⎛ ⎞ ⎛ ⎞− − +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
⎛ ⎞− + += +⎜ ⎟
⎜ ⎟+ +⎝ ⎠
+ + +=
+
+=
+
=+
( )
2
arg ( )( )
2cos 2 arctan
H fH f
fftaππ
+
⎛ ⎞⎜ ⎟⎛ ⎞⎜ ⎟− ⎜ ⎟
⎝ ⎠⎜ ⎟⎜ ⎟⎝ ⎠
( )
2 2
1
arg arctan
a iba ib a b
ba iba
−=
+ +⎛ ⎞+ = ⎜ ⎟⎝ ⎠
4
22.11.2007 7
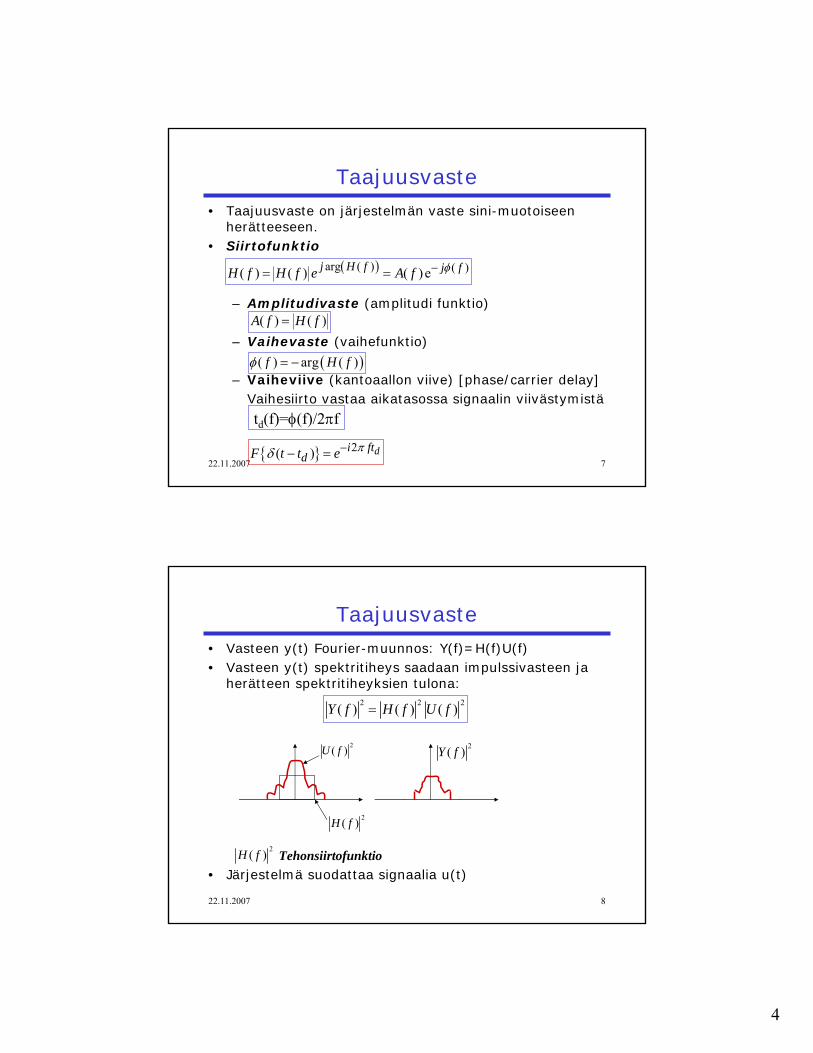
Taajuusvaste• Taajuusvaste on järjestelmän vaste sini-muotoiseen
herätteeseen.• Siirtofunktio
– Amplitudivaste (amplitudi funktio)
– Vaihevaste (vaihefunktio)
– Vaiheviive (kantoaallon viive) [phase/carrier delay]Vaihesiirto vastaa aikatasossa signaalin viivästymistä
( )( ) arg ( )f H fφ = −
( )arg ( ) ( )( ) ( ) ( ) ej H f j fH f H f e A f φ−= =
( ) ( )A f H f=
{ } 2( ) di ftdF t t e πδ −− =
td(f)=φ(f)/2πf
22.11.2007 8
Taajuusvaste• Vasteen y(t) Fourier-muunnos: Y(f)=H(f)U(f)• Vasteen y(t) spektritiheys saadaan impulssivasteen ja
herätteen spektritiheyksien tulona:
• Järjestelmä suodattaa signaalia u(t)
2 2 2( ) ( ) ( )Y f H f U f=
2( )H f
2( )U f 2( )Y f
2( )H f Tehonsiirtofunktio
5
22.11.2007 9
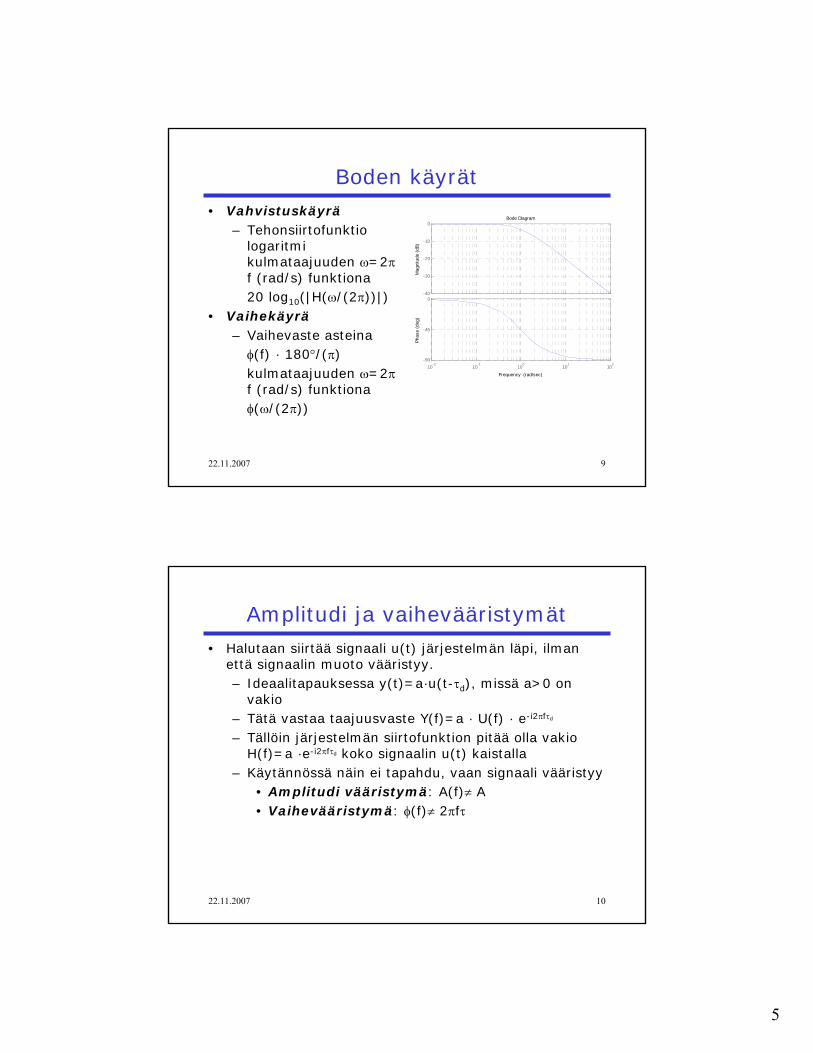
Boden käyrät • Vahvistuskäyrä
– Tehonsiirtofunktio logaritmi kulmataajuuden ω=2πf (rad/s) funktiona20 log10(|H(ω/(2π))|)
• Vaihekäyrä– Vaihevaste asteina
φ(f) · 180°/(π)kulmataajuuden ω=2πf (rad/s) funktionaφ(ω/(2π))
-40
-30
-20
-10
0
Mag
nitu
de (d
B)
10-2
10-1
100
101
102
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
22.11.2007 10
Amplitudi ja vaihevääristymät• Halutaan siirtää signaali u(t) järjestelmän läpi, ilman
että signaalin muoto vääristyy.– Ideaalitapauksessa y(t)=a·u(t-τd), missä a>0 on
vakio– Tätä vastaa taajuusvaste Y(f)=a · U(f) · e-i2πfτd
– Tällöin järjestelmän siirtofunktion pitää olla vakio H(f)=a ·e-i2πfτd koko signaalin u(t) kaistalla
– Käytännössä näin ei tapahdu, vaan signaali vääristyy• Amplitudi vääristymä: A(f)≠ A • Vaihevääristymä: φ(f)≠ 2πfτ
6
22.11.2007 11
Amplitudi ja vaihevääristymät• Ryhmäkulkuaika
kuvaa vaiheen muutosta taajuuden funktiona.• Ideaalisessa tapauksessa on taajuudesta riippumaton
vakio. • Vaihevääristymä kaistanpäästösignaalille u(t) kaistalla
(fc-B/2, fc+B/2), fc kantoaallon taajuus
1( ) ( )2g
dt f fdf
φπ
=
gt
( )( ) ( )
2, 2max
c cg g g c
f f B f Bt t f t f
∈ − +Δ = −
2f f
gf
d t fφ φ π+Δ
Δ = ≤ Δ Δ∫Vaiheen muutos taajuuden muutoksen suhteen
22.11.2007 12
Vaihevääristymät• Tarkastellaan lineaarisesti moduloitua signaalia, jonka
kaistanleveys on B
• Signaali kulkee kanavan (järjestelmän) läpi. • Kanavan siirtofunktio on
• Vaiheviive
• Ryhmäviive
( )( ) ( ) cos 2 cu t x t f tπ=1 1( ) ( ) ( )2 2c cU f X f f X f f= + + −
( )02 sgn
0
( )( )( ) 2 , 0
gi f f
g
H f aeA f a
f f f
π τ φ
φ π τ φ
− +=== + >
AmplitudivasteVaihevaste
0( )2d gt f
fφ
τπ
= +
1 ( )( )2g g
d ft fdf
φ τπ
= =
7
22.11.2007 13
Vaihevääristymät• Ulostulosignaali taajuustasossa
• ja aikatasossa
2 21 1( ) ( ) ( ) ( ) ( )2 2
g d g di f i i f ic cY f H f U f X f f ae X f f eπ τ φ π τ φ− + − −= = + + −
( )( )( ) ( ) cos 2g c g dy t x t f tτ π τ φ= − − −
( )( )( )( ) ( )cos 2g c d cy t x t f t t fτ π= − − ( ) 02d gt f φ
τπ
= +
( ){ } ( ) ( )cos 2 i ic c cF f t f f e f f eφ φπ φ δ δ−+ = + + −
Vaiheviive / kantoaallon viiveRyhmäviive
22.11.2007 14
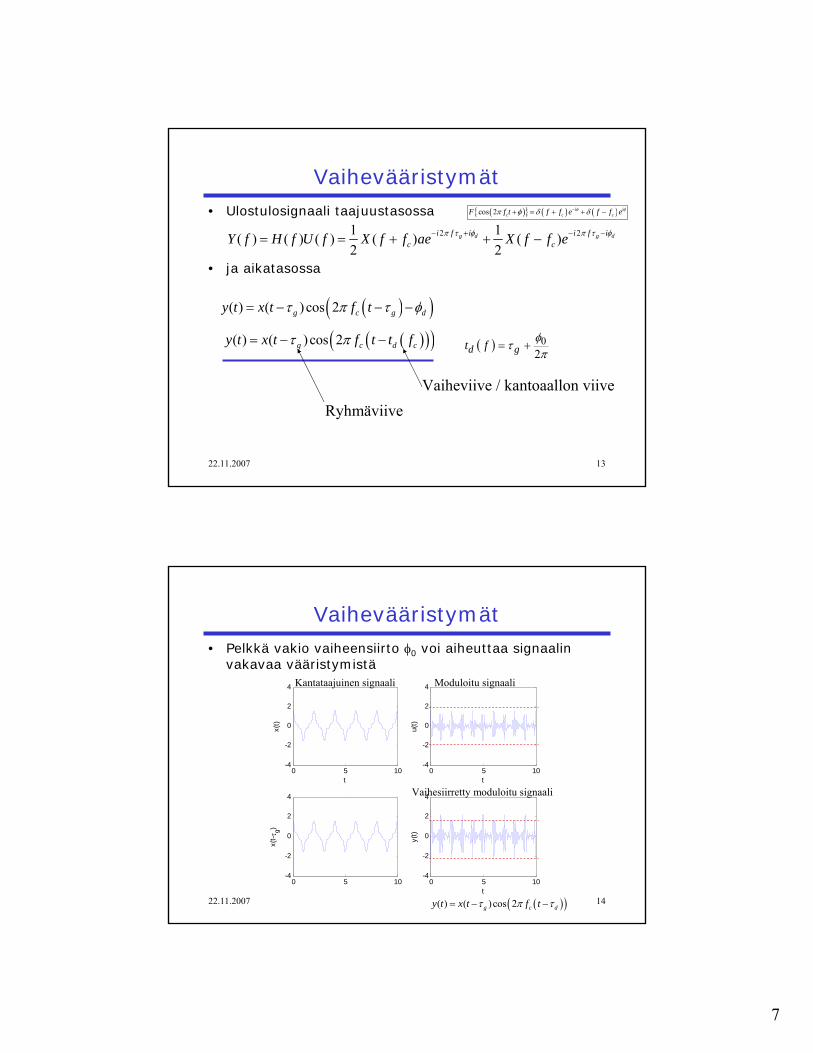
Vaihevääristymät• Pelkkä vakio vaiheensiirto φ0 voi aiheuttaa signaalin
vakavaa vääristymistä
0 5 10-4
-2
0
2
4
x(t)
t0 5 10
-4
-2
0
2
4
u(t)
t
0 5 10-4
-2
0
2
4
x(t- τ
g)
0 5 10-4
-2
0
2
4
y(t)
t
( )( )( ) ( )cos 2g c dy t x t f tτ π τ= − −
Kantataajuinen signaali Moduloitu signaali
Vaihesiirretty moduloitu signaali
8
22.11.2007 15
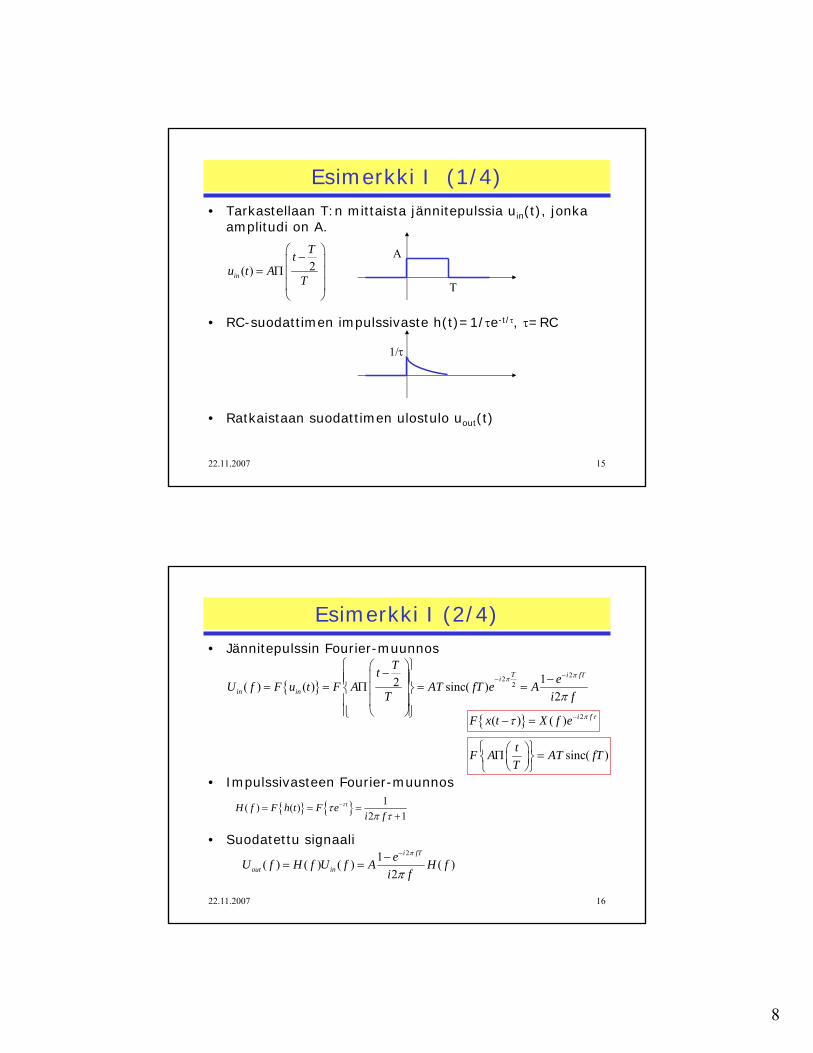
Esimerkki I (1/4)• Tarkastellaan T:n mittaista jännitepulssia uin(t), jonka
amplitudi on A.
• RC-suodattimen impulssivaste h(t)=1/τe-t/τ, τ=RC
• Ratkaistaan suodattimen ulostulo uout(t)
2( )in
Ttu t A
T
⎛ ⎞−⎜ ⎟= Π ⎜ ⎟
⎜ ⎟⎝ ⎠
T
A
1/τ
22.11.2007 16
Esimerkki I (2/4)• Jännitepulssin Fourier-muunnos
• Impulssivasteen Fourier-muunnos
• Suodatettu signaali
{ }22
2 12( ) ( ) sinc( )2
T i fTi
in in
Tt eU f F u t F A AT fT e AT i f
ππ
π
−−
⎧ ⎫⎛ ⎞−⎪ ⎪⎜ ⎟ −⎪ ⎪= = Π = =⎨ ⎬⎜ ⎟⎪ ⎪⎜ ⎟⎪ ⎪⎝ ⎠⎩ ⎭
sinc( )tF A AT fTT
⎧ ⎫⎛ ⎞Π =⎨ ⎬⎜ ⎟⎝ ⎠⎩ ⎭
{ } 2( ) ( ) i fF x t X f e π ττ −− =
{ } { } 1( ) ( )2 1
tH f F h t F ei f
ττπ τ
−= = =+
21( ) ( ) ( ) ( )2
i fT
out ineU f H f U f A H f
i f
π
π
−−= =
9
22.11.2007 17
Esimerkki I (3/4)• Ulostulojänniteen Fourier-muunnos
• Ratkaistaan X(f):n käänteismuunnos
• Ulostulojänniteen lausekkeeksi saadaan
( )( )2
X fF x t dti fπ
⎧ ⎫⇔⎨ ⎬
⎩ ⎭∫
{ } 2( ) ( ) i fF x t X f e π ττ −− =
( )2
2
1( ) ( ) ( ) ( ) 12
1( ) ( ) , ( ) ( )2
i fTout in
i fT
U f H f U f A H f ei f
X f X f e X f A H fi f
π
π
π
π
−
−
= = −
= − =
{ }1 1
1 10
1 1 01( ) ( ) ( )2
0
t t tA e dt A e t
x t F X f F A H fi f
t
τ τ
τπ
− −
− −
⎧ ⎛ ⎞= − ≥⎧ ⎫ ⎪ ⎜ ⎟= = =⎨ ⎬ ⎨ ⎝ ⎠
⎩ ⎭ ⎪ < +⎩
∫
{ } { }1 1 2( ) ( ) ( ) ( ) ( ) ( )i fTout outu t F U f F X f X f e x t x t Tπ− − −= = − = − −
22.11.2007 18
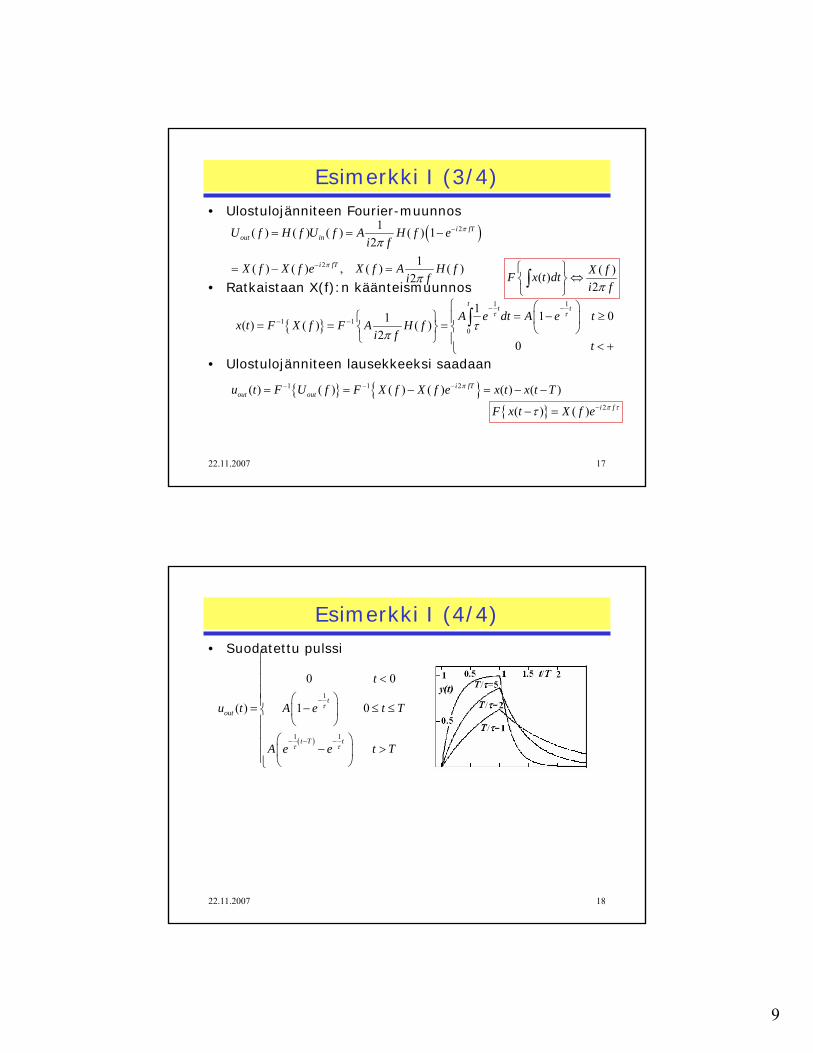
Esimerkki I (4/4)• Suodatettu pulssi
( )
1
1 1
0 0
( ) 1 0t
out
t T t
t
u t A e t T
A e e t T
τ
τ τ
−
− − −
⎧⎪
<⎪⎪ ⎛ ⎞⎪= − ≤ ≤⎨ ⎜ ⎟
⎝ ⎠⎪⎪ ⎛ ⎞⎪ − >⎜ ⎟⎪ ⎝ ⎠⎩
10
22.11.2007 19
Esimerkki II (1/6)• Tarkastellaan RC-suodinta
~( )inu t ( )outu tC
R ( ) ( )outdi t C u tdt
=( )i t
( ) ( ) ( )in outu t Ri t u t= +
( )1( ) ( ) ( )out in outd u t u t u tdt RC
= −
Impulssivaste
( )
( )
1( ) ( ) ( )
12 ( ) 1 ( )
1
( ) 12
d h t t h tdt RC
i fH f H fRC
RCH fi f
RC
δ
π
π
= −
⇒ = −
⇒ =+
11
11( ) 12
tRCRCh t F e
RCi fRC
π
−−
⎧ ⎫⎪ ⎪
= =⎨ ⎬⎪ ⎪+⎩ ⎭
22.11.2007 20
Esimerkki II (2/6)• Jos RC=1, niin
-40
-30
-20
-10
0
Mag
nitu
de (d
B)
10-2
10-1
100
101
102
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
h(t)
{ }( ) arg ( ) arctan(2 )f H f fφ π= − =
( )A f =
ω=2π f
11
22.11.2007 21
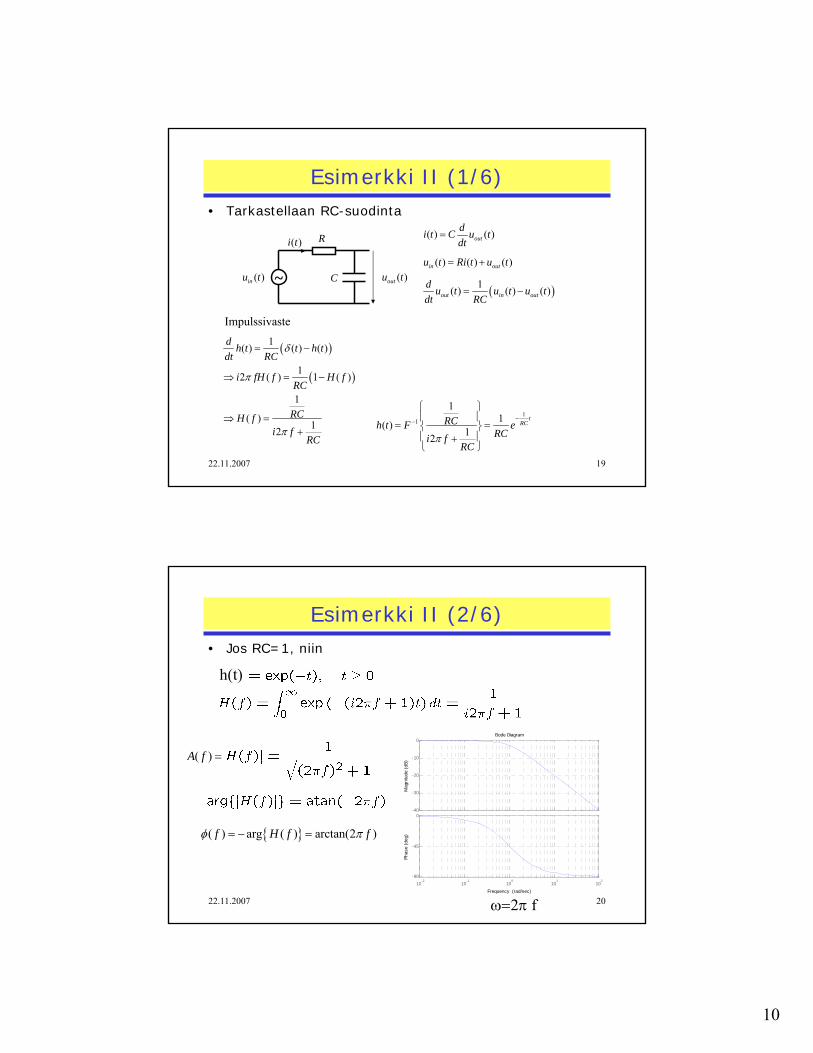
Esimerkki II (3/6)• Ryhmäviive
• Ryhmäviiveen muutos kaistalla f∈[1/(2π), 3/(2π)]
( )1 ( ) 1( ) 22 2
1arctan(2 )1 2
gd f dt f
df dff
fφ
π ππ
π= = =
+
( )1 3,
2 2
2max 0.32g g g
ft t f t
π ππ⎛ ⎞∈⎜ ⎟
⎝ ⎠
⎛ ⎞Δ = − ≈⎜ ⎟⎝ ⎠
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 30
0.05
0.1
0.15
0.2
0.25
0.3
0.35
2π*f|t g(f)
-t g(f c)|
22.11.2007 22
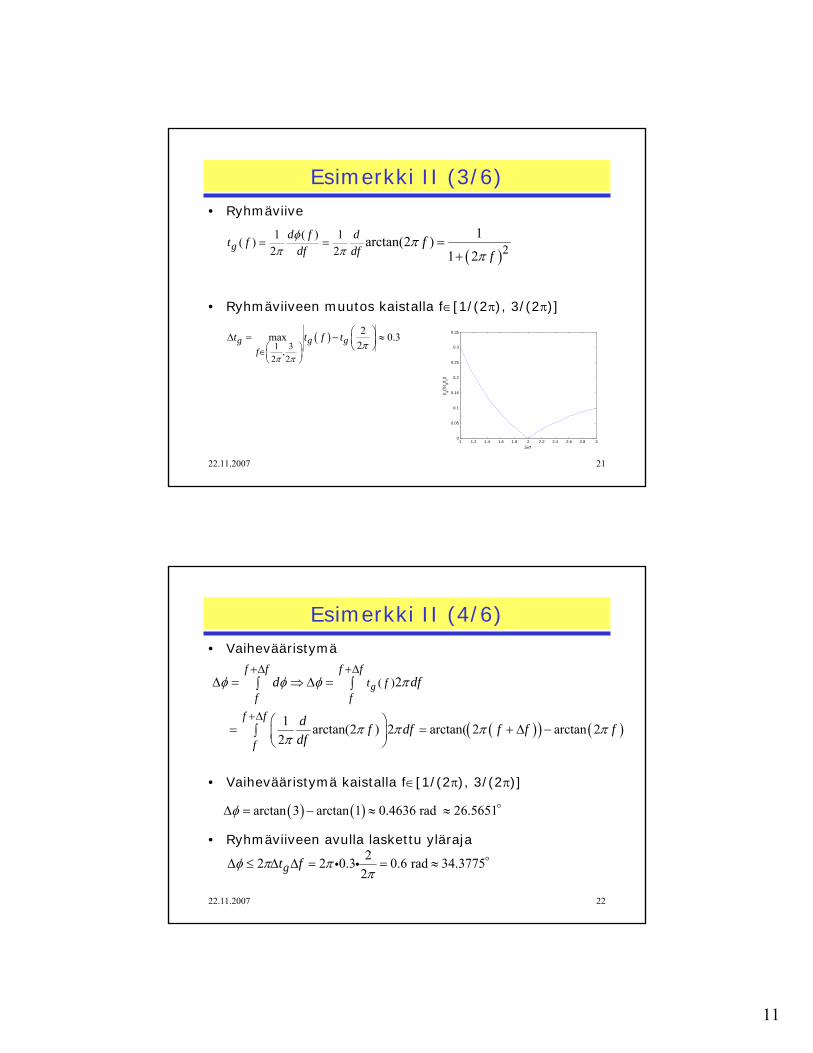
Esimerkki II (4/6)• Vaihevääristymä
• Vaihevääristymä kaistalla f∈[1/(2π), 3/(2π)]
• Ryhmäviiveen avulla laskettu yläraja
( )( ) ( )
( )2
1 arctan(2 ) 2 arctan( 2 arctan 22
g
f f f ft f
f ff f
f
d df
d f df f f fdf
φ φ φ π
π π π ππ
+Δ +Δ
+Δ
Δ = ⇒ Δ =∫ ∫
⎛ ⎞= = + Δ −∫ ⎜ ⎟
⎝ ⎠
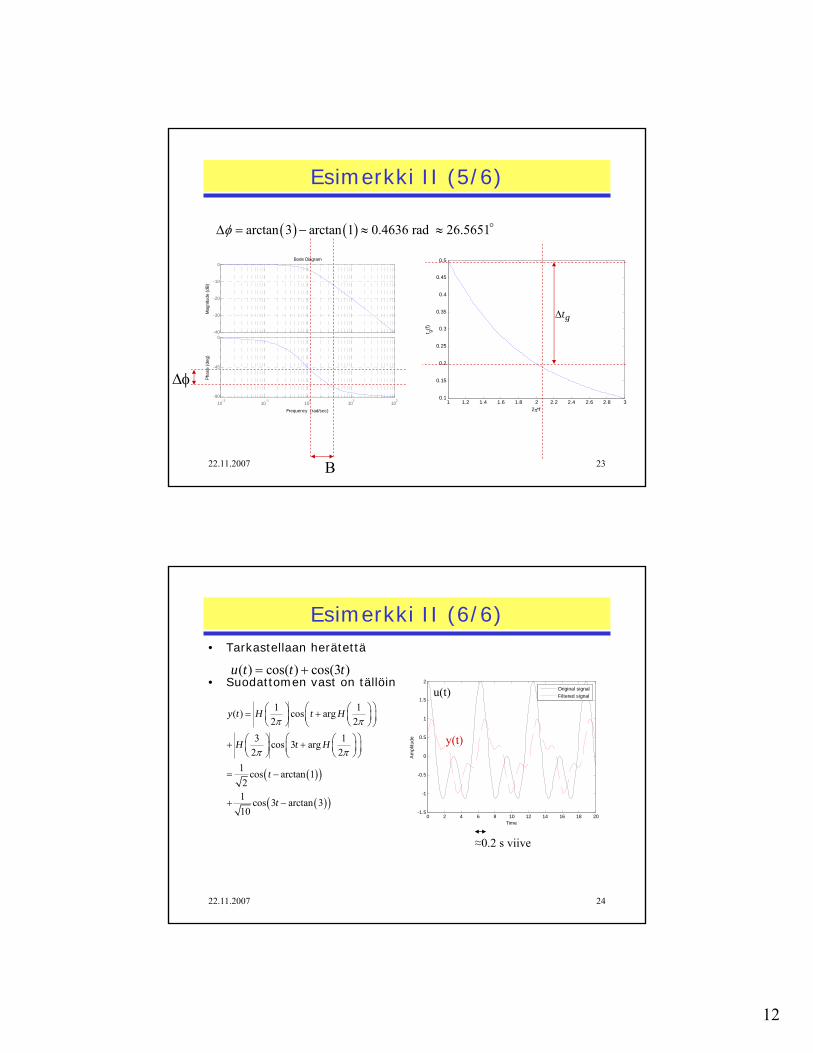
( ) ( )arctan 3 arctan 1 0.4636 rad 26.5651φΔ = − ≈ ≈
22 2 0.3 0.6 rad 34.37752gt fφ π ππ
Δ ≤ Δ Δ = = ≈i i
12
22.11.2007 23
Esimerkki II (5/6)
-40
-30
-20
-10
0
Mag
nitu
de (d
B)
10-2
10-1
100
101
102
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Δφ
Β
( ) ( )arctan 3 arctan 1 0.4636 rad 26.5651φΔ = − ≈ ≈
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 30.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
2π*f
t g(f)
gtΔ
22.11.2007 24
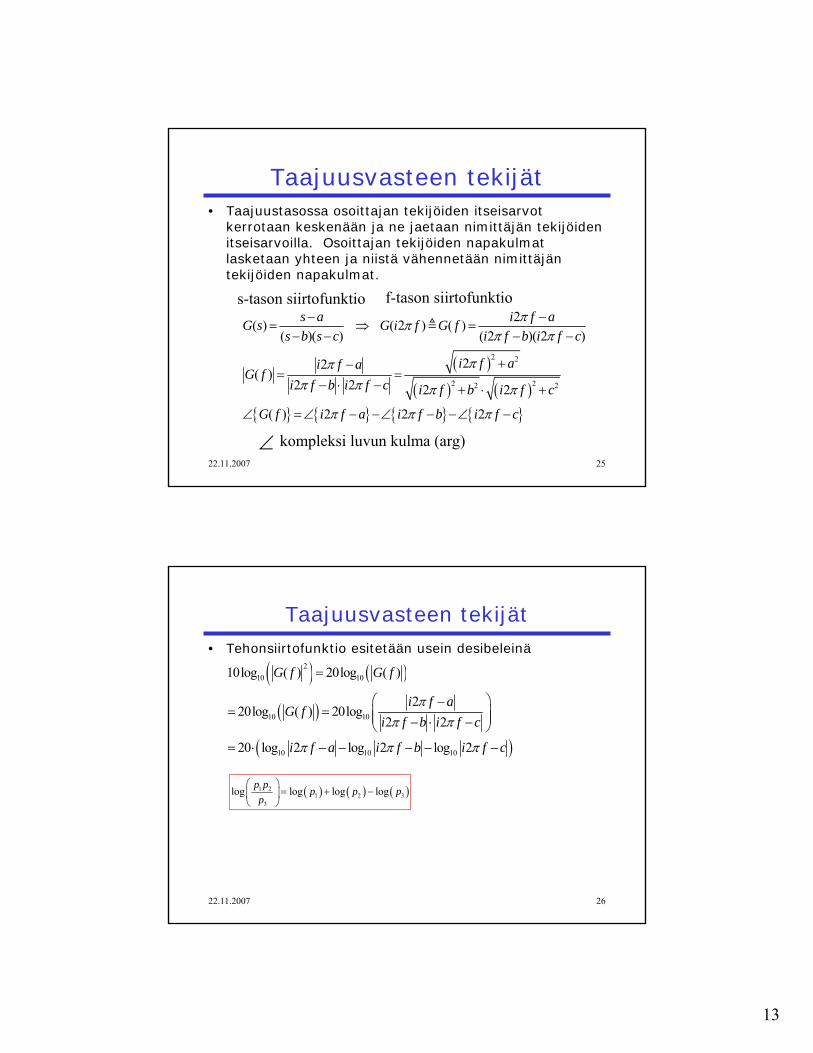
Esimerkki II (6/6)• Tarkastellaan herätettä
• Suodattomen vast on tällöin( ) cos( ) cos(3 )u t t t= +
( )( )
( )( )
1 1( ) cos arg2 2
3 1cos 3 arg2 2
1 cos arctan 121 cos 3 arctan 310
y t H t H
H t H
t
t
π π
π π
⎛ ⎞⎛ ⎞ ⎛ ⎞= +⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠⎛ ⎞⎛ ⎞ ⎛ ⎞+ +⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠
= −
+ −0 2 4 6 8 10 12 14 16 18 20
-1.5
-1
-0.5
0
0.5
1
1.5
2
Time
Am
plitu
de
Original signalFiltered signalu(t)
y(t)
≈0.2 s viive
13
22.11.2007 25
Taajuusvasteen tekijät• Taajuustasossa osoittajan tekijöiden itseisarvot
kerrotaan keskenään ja ne jaetaan nimittäjän tekijöiden itseisarvoilla. Osoittajan tekijöiden napakulmat lasketaan yhteen ja niistä vähennetään nimittäjän tekijöiden napakulmat.
( )( ) ( )
{ } { } { } { }
2 2
2 22 2
2( ) ( 2 ) ( )( )( ) ( 2 )( 2 )
22( )
2 2 2 2
( ) 2 2 2
s a i f aG s G i f G fs b s c i f b i f c
i f ai f aG f
i f b i f c i f b i f c
G f i f a i f b i f c
πππ π
πππ π π π
π π π
− −= ⇒ =
− − − −
+−= =
− ⋅ − + ⋅ +
∠ = ∠ − −∠ − −∠ −
s-tason siirtofunktio f-tason siirtofunktio
∠ kompleksi luvun kulma (arg)
22.11.2007 26
Taajuusvasteen tekijät• Tehonsiirtofunktio esitetään usein desibeleinä
( ) ( ) ( )1 21 2 3
3
log log log logp p p p pp
⎛ ⎞= + −⎜ ⎟
⎝ ⎠
( ) ( )
( )
( )
210 10
10 10
10 10 10
10log ( ) 20log ( )
220log ( ) 20log
2 2
20 log 2 log 2 log 2
G f G f
i f aG f
i f b i f c
i f a i f b i f c
ππ π
π π π
=
⎛ ⎞−= = ⎜ ⎟⎜ ⎟− ⋅ −⎝ ⎠= ⋅ − − − − −
14
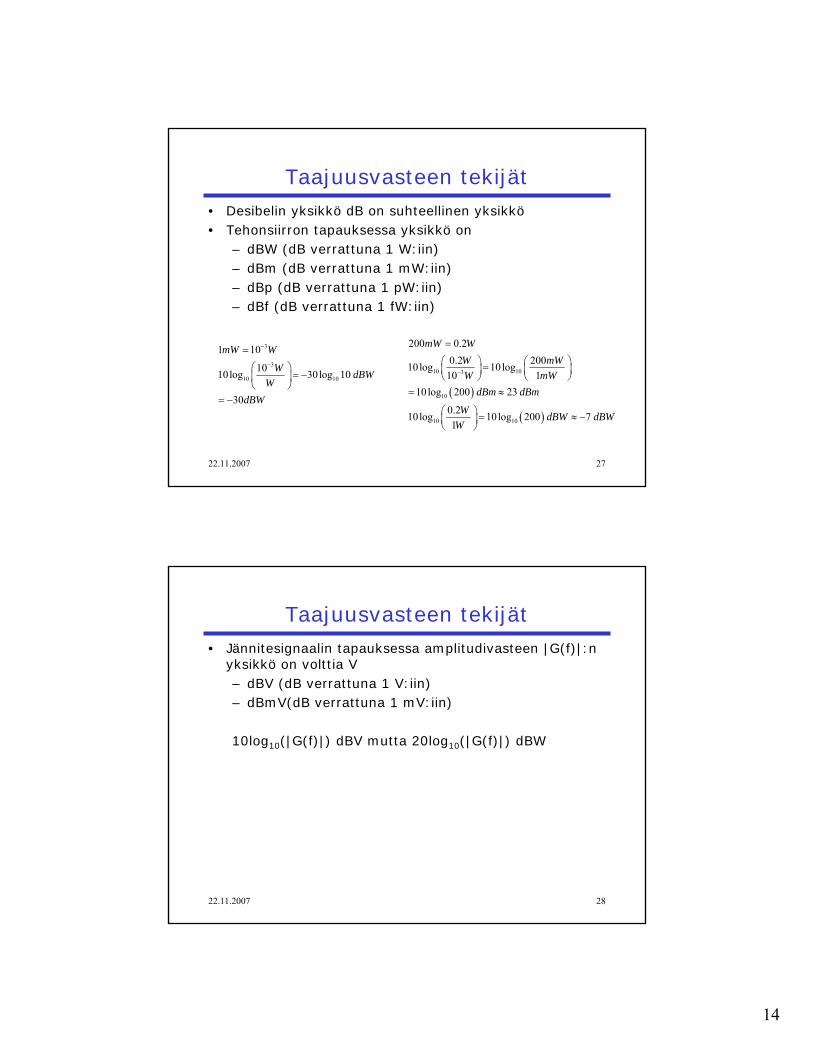
22.11.2007 27
Taajuusvasteen tekijät• Desibelin yksikkö dB on suhteellinen yksikkö• Tehonsiirron tapauksessa yksikkö on
– dBW (dB verrattuna 1 W:iin)– dBm (dB verrattuna 1 mW:iin)– dBp (dB verrattuna 1 pW:iin)– dBf (dB verrattuna 1 fW:iin)
3
3
10 10
1 10
1010log 30log 10
30
mW W
W dBWW
dBW
−
−
=
⎛ ⎞= −⎜ ⎟
⎝ ⎠= −
( )
( )
10 103
10
10 10
200 0.20.2 20010log 10log
10 110log 200 23
0.210log 10log 200 71
mW WW mWW mW
dBm dBm
W dBW dBWW
−
=
⎛ ⎞ ⎛ ⎞=⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
= ≈
⎛ ⎞ = ≈ −⎜ ⎟⎝ ⎠
22.11.2007 28
Taajuusvasteen tekijät• Jännitesignaalin tapauksessa amplitudivasteen |G(f)|:n
yksikkö on volttia V– dBV (dB verrattuna 1 V:iin)– dBmV(dB verrattuna 1 mV:iin)
10log10(|G(f)|) dBV mutta 20log10(|G(f)|) dBW
15
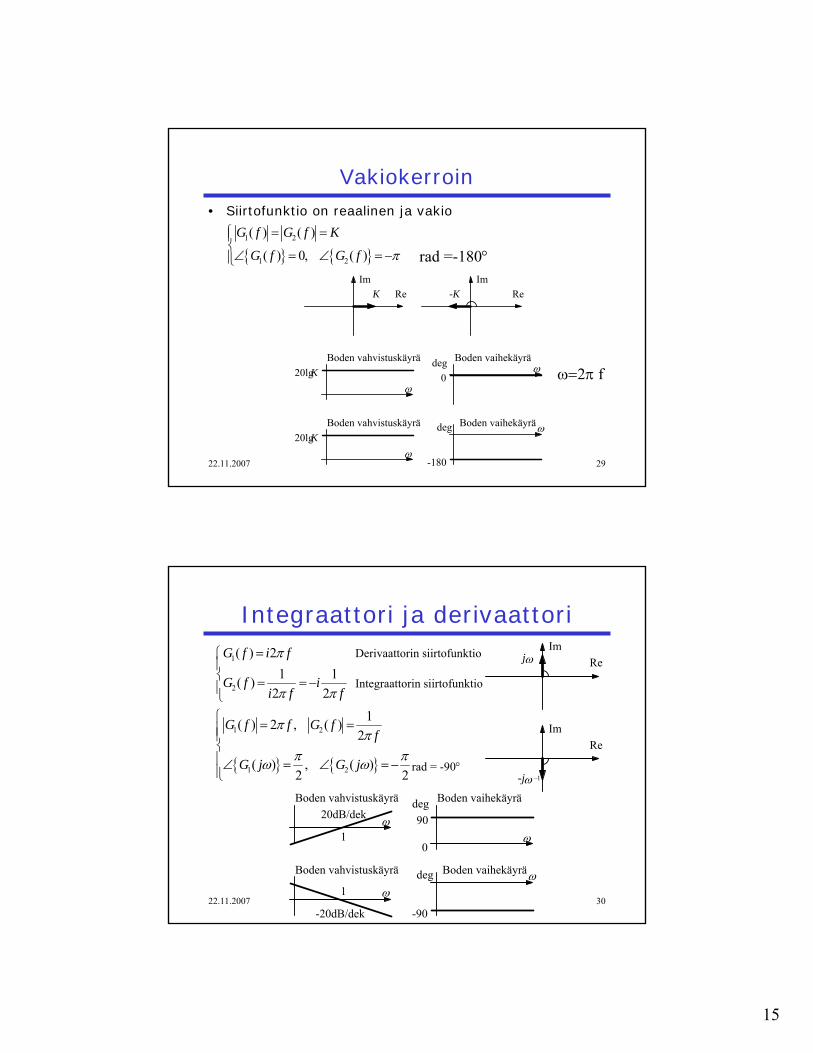
22.11.2007 29
Vakiokerroin• Siirtofunktio on reaalinen ja vakio
{ } { }1 2
1 2
( ) ( )
( ) 0, ( )
G f G f K
G f G f π
⎧ = =⎪⎨∠ = ∠ = −⎪⎩ rad =-180°
ImReK
ImRe-K
20lgK 0
-180
Boden vahvistuskäyrä Boden vaihekäyrä
Boden vaihekäyrä
ω
ω
ω
deg
deg20lgK
Boden vahvistuskäyrä
ω
ω=2π f
22.11.2007 30
Integraattori ja derivaattori
{ } { }
1
2
1 2
1 2
( ) 21 1( )
2 21( ) 2 , ( )
2
( ) , ( )2 2
G f i f
G f ii f f
G f f G ff
G j G j
π
π π
ππ
π πω ω
=⎧⎪⎨ = = −⎪⎩⎧ = =⎪⎪⎨⎪∠ = ∠ = −⎪⎩
ImRe
ImRe
-jω −1
jωDerivaattorin siirtofunktio
Integraattorin siirtofunktio
0
-90
Boden vahvistuskäyrä Boden vaihekäyrä
Boden vaihekäyrä
ωω
ω
deg
deg
20dB/dek
Boden vahvistuskäyrä
ω
90
-20dB/dek
1
1
rad = -90°
16
22.11.2007 31
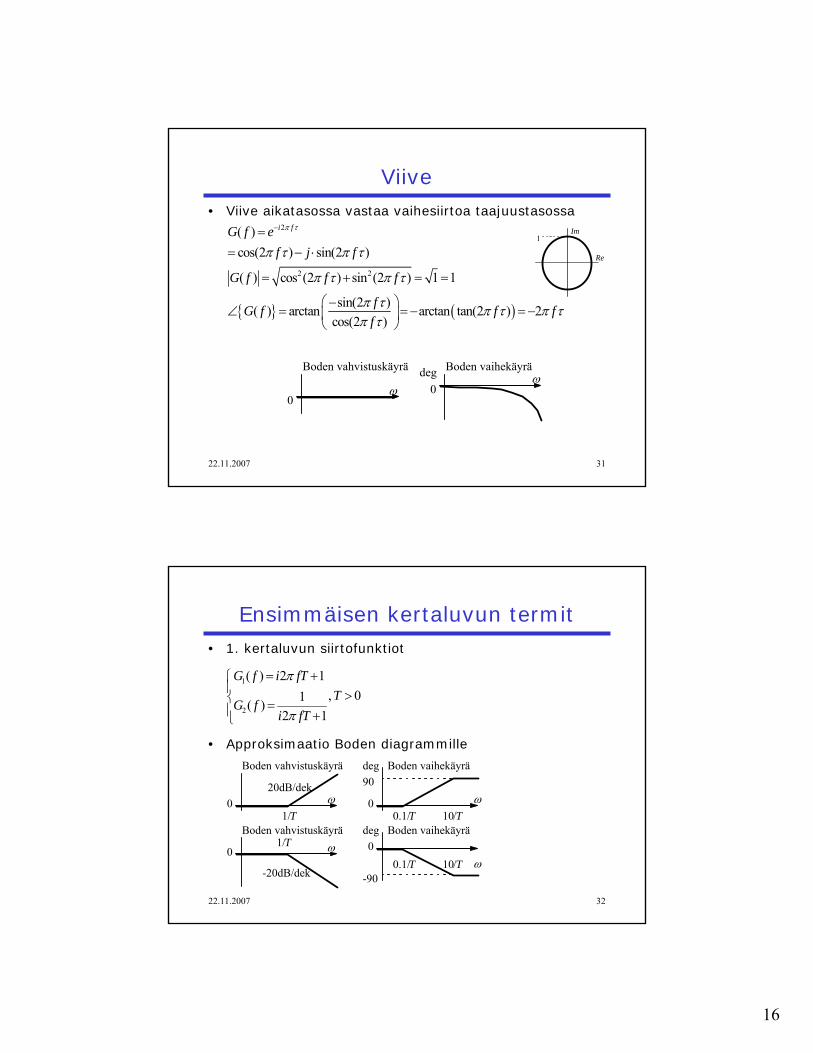
Viive• Viive aikatasossa vastaa vaihesiirtoa taajuustasossa
{ } ( )
2
2 2
( )cos(2 ) sin(2 )
( ) cos (2 ) sin (2 ) 1 1
sin(2 )( ) arctan arctan tan(2 ) 2cos(2 )
i fG f ef j f
G f f f
fG f f ff
π τ
π τ π τ
π τ π τ
π τ π τ π τπ τ
−== − ⋅
= + = =
⎛ ⎞−∠ = = − = −⎜ ⎟
⎝ ⎠
0
Boden vahvistuskäyrä Boden vaihekäyrä
ωωdeg
0
Im
Re
1
22.11.2007 32
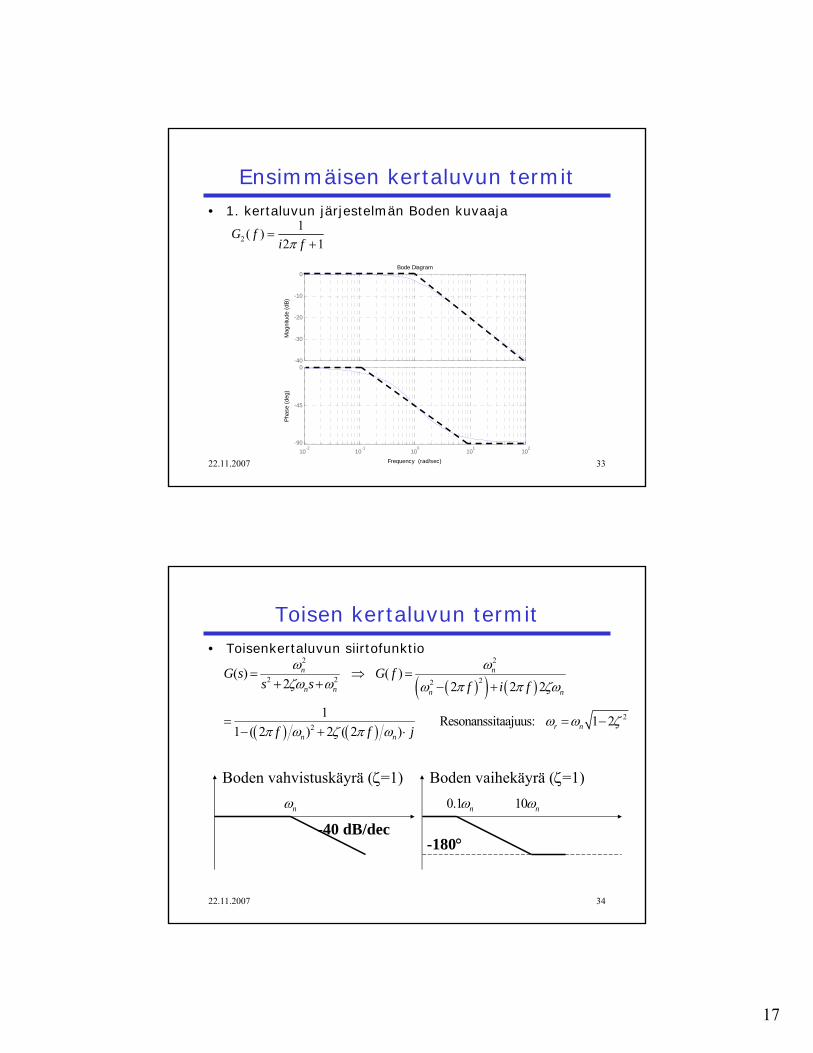
Ensimmäisen kertaluvun termit• 1. kertaluvun siirtofunktiot
• Approksimaatio Boden diagrammille
1
2
( ) 2 1, 01( )
2 1
G f i fTT
G fi fT
π
π
= +⎧⎪ >⎨ =⎪ +⎩
Boden vahvistuskäyrä
ω1/T
Boden vaihekäyrä
ω
deg
0 00.1/T 10/T
90
Boden vahvistuskäyräω1/T
Boden vaihekäyrä
ω
deg
0 00.1/T 10/T
-90
20dB/dek
-20dB/dek
17
22.11.2007 33
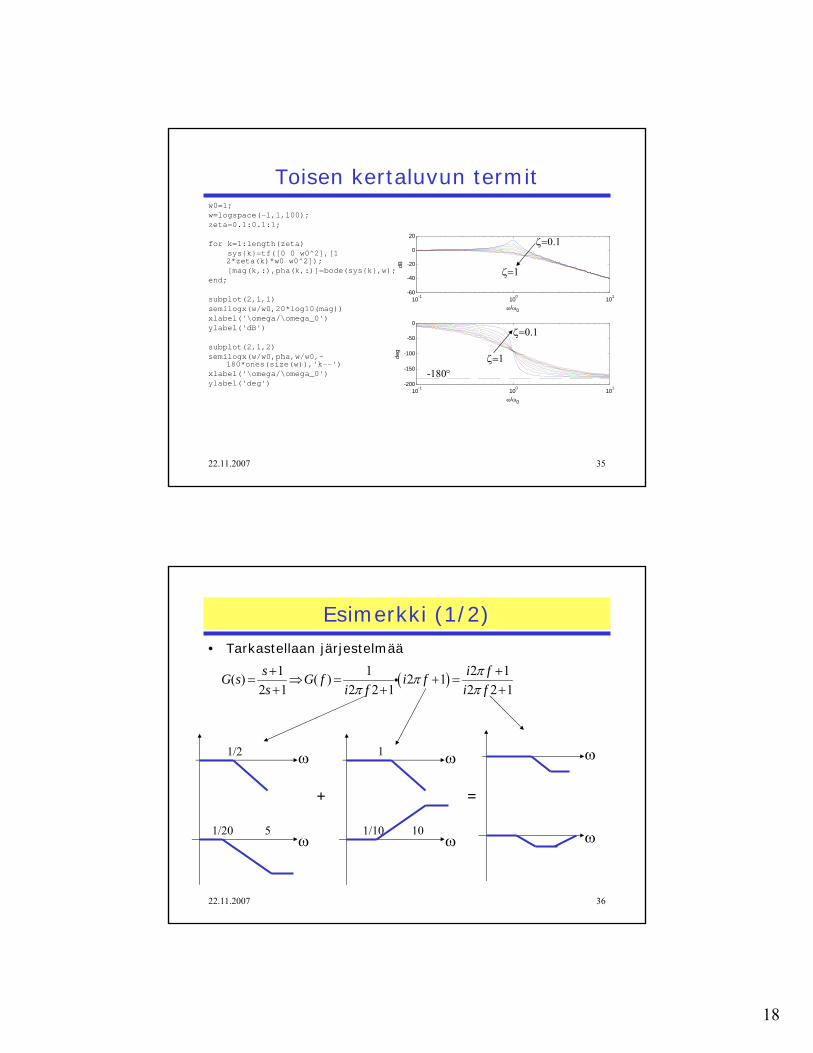
Ensimmäisen kertaluvun termit• 1. kertaluvun järjestelmän Boden kuvaaja
-40
-30
-20
-10
0
Mag
nitu
de (d
B)
10-2
10-1
100
101
102
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
21( )
2 1G f
i fπ=
+
22.11.2007 34
Toisen kertaluvun termit• Toisenkertaluvun siirtofunktio
( )( ) ( )
( ) ( )
2 2
2 2 22
22
( ) ( )2 2 2 2
1 Resonanssitaajuus: 1 21 ( 2 ) 2 ( 2 )
n n
n n n n
r nn n
G s G fs s f i f
f f j
ω ωζω ω ω π π ζω
ω ω ζπ ω ζ π ω
= ⇒ =+ + − +
= = −− + ⋅
-40 dB/decnω
Boden vahvistuskäyrä (ζ=1)
-180°
0.1 nω
Boden vaihekäyrä (ζ=1)10 nω
18
22.11.2007 35
Toisen kertaluvun termitw0=1;w=logspace(-1,1,100);zeta=0.1:0.1:1;
for k=1:length(zeta)sys{k}=tf([0 0 w0^2],[1 2*zeta(k)*w0 w0^2]);[mag(k,:),pha(k,:)]=bode(sys{k},w);
end;
subplot(2,1,1)semilogx(w/w0,20*log10(mag))xlabel('\omega/\omega_0')ylabel('dB')
subplot(2,1,2)semilogx(w/w0,pha,w/w0,-
180*ones(size(w)),'k--')xlabel('\omega/\omega_0')ylabel('deg')
10-1 100 101-60
-40
-20
0
20
ω/ω0
dB10-1 100 101
-200
-150
-100
-50
0
ω/ω0de
g
ζ=0.1
ζ=1
ζ=0.1
ζ=1-180°
22.11.2007 36
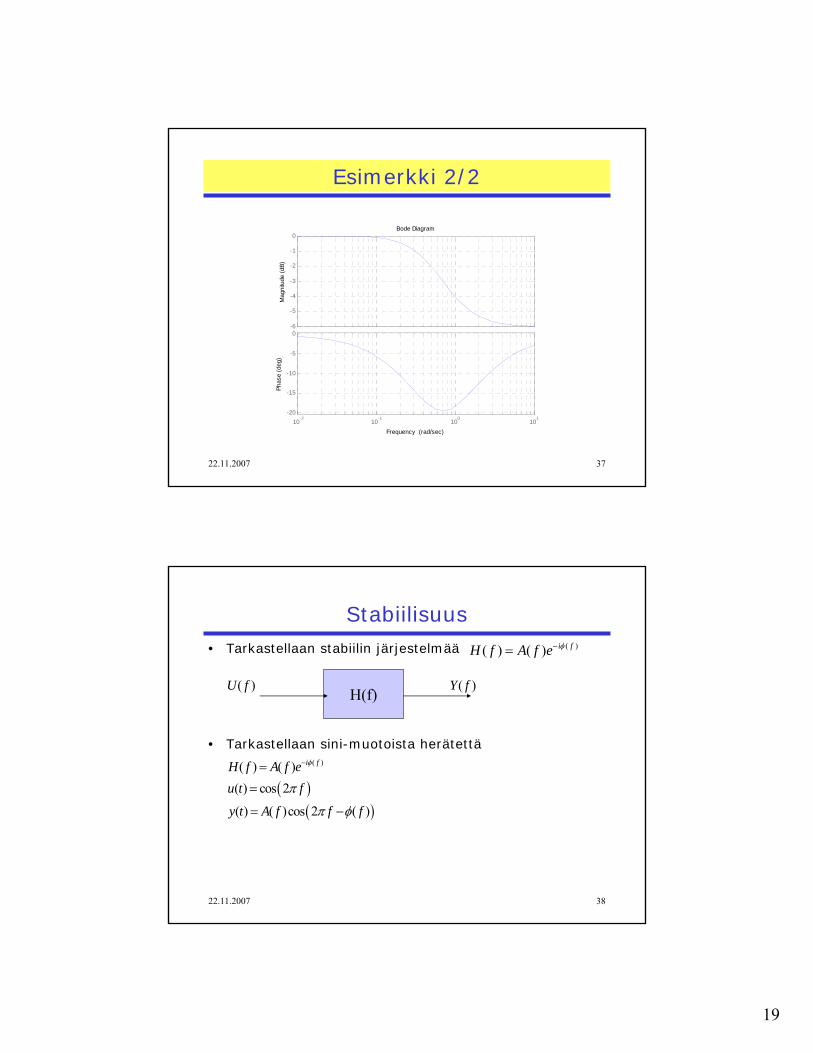
Esimerkki (1/2)• Tarkastellaan järjestelmää
( )1 1 2 1( ) ( ) 2 12 1 2 2 1 2 2 1s i fG s G f i fs i f i f
πππ π
+ += ⇒ = + =
+ + +i
1/2
1/20 5
ω
ω
1
1/10 10
ω
ω
ω
ω
+ =
19
22.11.2007 37
Esimerkki 2/2
-6
-5
-4
-3
-2
-1
0
Mag
nitu
de (d
B)
10-2
10-1
100
101
-20
-15
-10
-5
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
22.11.2007 38
Stabiilisuus• Tarkastellaan stabiilin järjestelmää
• Tarkastellaan sini-muotoista herätettä
H(f)( )U f ( )Y f
( )( )
( )( ) ( )( ) cos 2
( ) ( )cos 2 ( )
i fH f A f eu t f
y t A f f f
φ
π
π φ
−=
=
= −
( )( ) ( ) i fH f A f e φ−=
20
22.11.2007 39
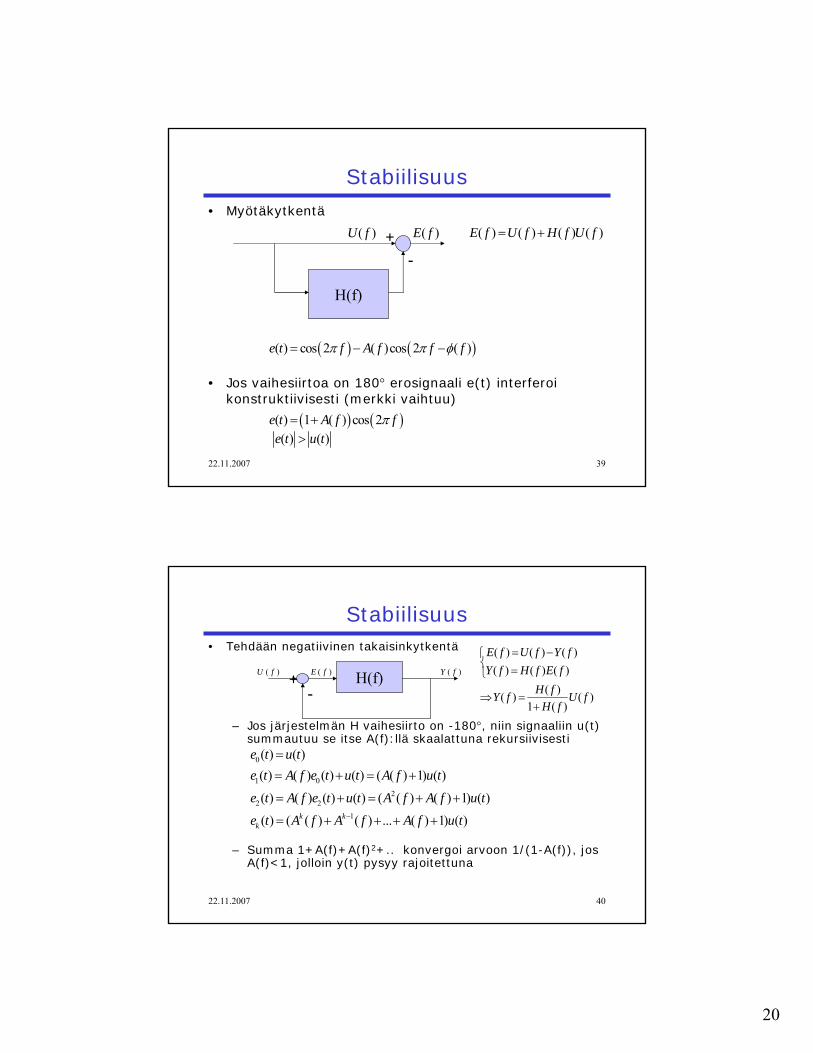
Stabiilisuus• Myötäkytkentä
• Jos vaihesiirtoa on 180° erosignaali e(t) interferoi konstruktiivisesti (merkki vaihtuu)
( )U f +-
( )E f
H(f)
( ) ( ) ( ) ( )E f U f H f U f= +
( ) ( )( ) cos 2 ( )cos 2 ( )e t f A f f fπ π φ= − −
( ) ( )( ) 1 ( ) cos 2e t A f fπ= +( ) ( )e t u t>
22.11.2007 40
Stabiilisuus• Tehdään negatiivinen takaisinkytkentä
– Jos järjestelmän H vaihesiirto on -180°, niin signaaliin u(t) summautuu se itse A(f):llä skaalattuna rekursiivisesti
– Summa 1+A(f)+A(f)2+.. konvergoi arvoon 1/(1-A(f)), jos A(f)<1, jolloin y(t) pysyy rajoitettuna
( ) ( ) ( )( ) ( ) ( )
( )( ) ( )1 ( )
E f U f Y fY f H f E f
H fY f U fH f
= −⎧⎨ =⎩
⇒ =+
H(f)+-
( )E f( )U f ( )Y f
0
1 02
2 21
( ) ( )( ) ( ) ( ) ( ) ( ( ) 1) ( )
( ) ( ) ( ) ( ) ( ( ) ( ) 1) ( )
( ) ( ( ) ( ) ... ( ) 1) ( )k kk
e t u te t A f e t u t A f u t
e t A f e t u t A f A f u t
e t A f A f A f u t−
=
= + = +
= + = + +
= + + + +
21
22.11.2007 41
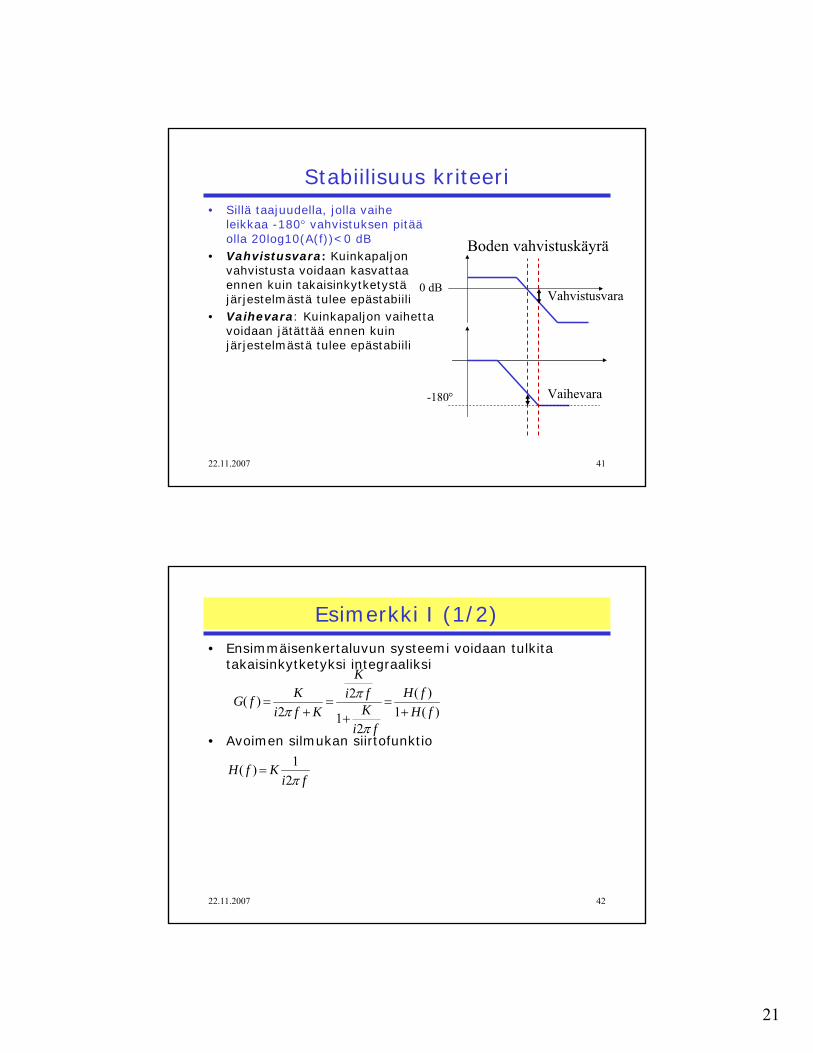
Stabiilisuus kriteeri• Sillä taajuudella, jolla vaihe
leikkaa -180° vahvistuksen pitääolla 20log10(A(f))<0 dB
• Vahvistusvara: Kuinkapaljonvahvistusta voidaan kasvattaa ennen kuin takaisinkytketystäjärjestelmästä tulee epästabiili
• Vaihevara: Kuinkapaljon vaihetta voidaan jätättää ennen kuin järjestelmästä tulee epästabiili
Boden vahvistuskäyrä
0 dB
-180°
Vahvistusvara
Vaihevara
22.11.2007 42
Esimerkki I (1/2)• Ensimmäisenkertaluvun systeemi voidaan tulkita
takaisinkytketyksi integraaliksi
• Avoimen silmukan siirtofunktio
( )2( )2 1 ( )1
2
KK H fi fG f Ki f K H f
i f
ππ
π
= = =+ ++
1( )2
H f Ki fπ
=
22
22.11.2007 43
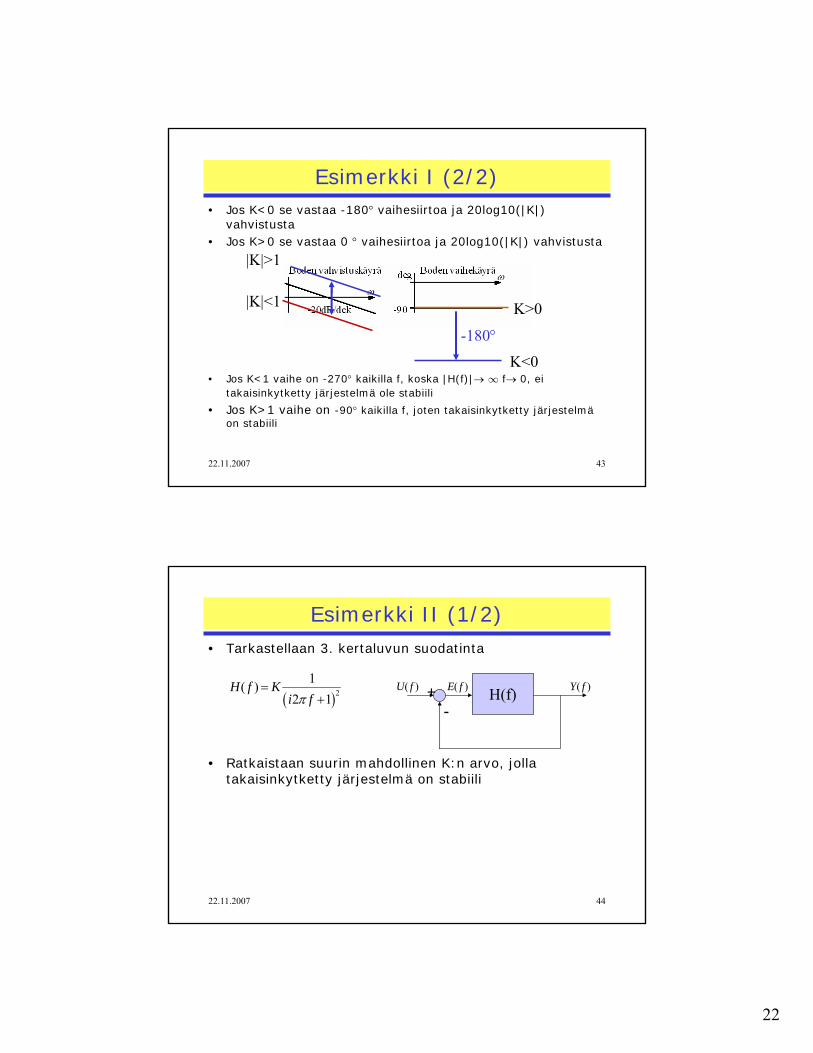
Esimerkki I (2/2)• Jos K<0 se vastaa -180° vaihesiirtoa ja 20log10(|K|)
vahvistusta• Jos K>0 se vastaa 0 ° vaihesiirtoa ja 20log10(|K|) vahvistusta
• Jos K<1 vaihe on -270° kaikilla f, koska |H(f)|→ ∞ f→ 0, ei takaisinkytketty järjestelmä ole stabiili
• Jos K>1 vaihe on -90° kaikilla f, joten takaisinkytketty järjestelmäon stabiili
-180°
|K|>1
|K|<1
K<0
K>0
22.11.2007 44
Esimerkki II (1/2)• Tarkastellaan 3. kertaluvun suodatinta
• Ratkaistaan suurin mahdollinen K:n arvo, jolla takaisinkytketty järjestelmä on stabiili
( )21( )
2 1H f K
i fπ=
+ H(f)+-
( )E f( )U f ( )Y f
23
22.11.2007 45
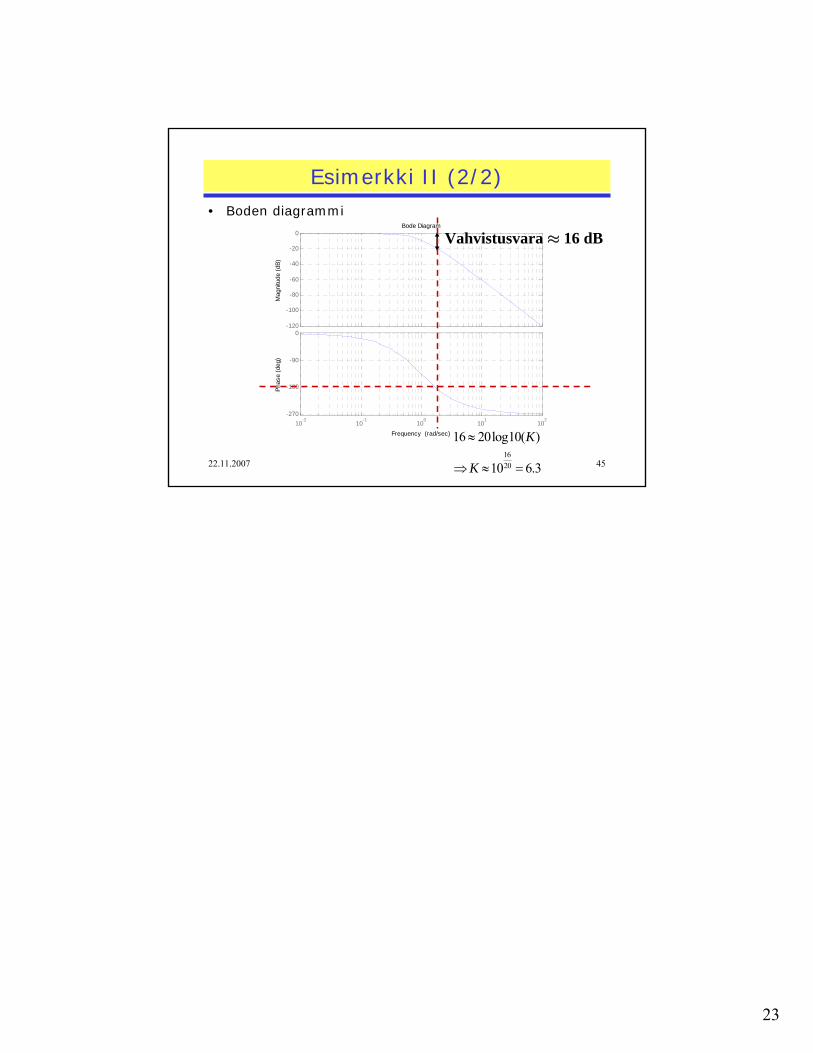
Esimerkki II (2/2)• Boden diagrammi
-120
-100
-80
-60
-40
-20
0
Mag
nitu
de (d
B)
10-2
10-1
100
101
102
-270
-180
-90
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Vahvistusvara ≈ 16 dB
1620
16 20log10( )
10 6.3
K
K
≈
⇒ ≈ =