Robust Extremes in Chaotic Deterministic...
1
Robust Extremes in Chaotic Deterministic Systems Renato Vitolo, Mark P. Holland, Christopher A.T. Ferro School of Engineering, Computing and Mathematics, University of Exeter (www.secam.ex.ac.uk/xcs/). The concept A chaotic deterministic system f ρ has robust extremes under observable φ when the associated extreme value statistics depend smoothly on control parameter ρ. Results Robustness of extremes: 1. depends on system f ρ and on observable φ; 2. allows improved estimates by pooling data and 3. improved prediction of (non-stationary) return levels. Phenomenology Robustness of extremes depends on the system f ρ and on the observable φ. Illustration for Lorenz63 model with σ = 10, β = 8 3 : ˙ x = σ (y - x), ˙ y = x(ρ - z ) - y, ˙ z = xy - βz. (1) For ρ = 28: (1) has robust strange attractor [1]. Let φ 1 (x, y, z )= x, φ 2 (x, y, z )=1 -|x - 5| 0.25 . (2) Generate time series of length 10 n units (recorded every 0.5) and extract maxima over blocks of 1000 time units. Fit generalised extreme value (GEV) distribution: G(x; μ, σ, ξ ) = exp - 1+ ξ x - μ σ -1/ξ + . (3) 30 40 50 60 -0.25 -0.21 -0.17 φ 1 = x φ 2 =1 -|x - 5| 0.25 ξ ρ F IG . 1: Maximum likelihood estimates of ξ for ob- servables φ 1 and φ 2 in (2), for ρ j = 27 + j , j =0, 1,... φ 1 : for small ρ (≈ 28), ξ varies smoothly with ρ. Non- linear scaling of attractor shape of ξ (ρ). Discontinuous for large ρ due to hyperbolicity loss (folds in return map). φ 2 : ξ (ρ)=0.25 is constant even under hyperbolicity loss. Rigorous proof available for 1D Lorenz maps. -3 -2 -1 0 1 2 3 4 -3 -2 -1 0 1 2 3 4 -3 -2 -1 0 1 2 3 4 ρ = 58 ρ = 59 ρ = 60 F IG . 2: Discontinuity in upper tail at ρ = 59 for φ 1 (quantile-quantile plot of 10 4 maxima from Fig 1, for each ρ = 58, 59, 60). Pooling data Robustness of extremes enhanced precision of GEV estimators. 17.4 17.6 17.8 n=5 n=8 0.4 0.5 0.6 27.0 27.4 27.8 -0.4 -0.2 0 n=5 pooled n=8 27.0 27.4 27.8 μ σ ξ ρ ρ F IG . 3: Left: GEV parameter estimates for (1) with n =5 (dashed, 95% conf. int. in gray) and n =8 (solid). Right: “pooled” estimates with n = 5 (dashed, 95% conf. int. in gray). Large n: GEV parameter estimates → smooth functions of ρ (solid lines in Fig 3, n =8). Small n: wild oscillations around “true values” (dashed lines, left column in Fig 3, n =5). Enhanced precision: “pooling” short series (n =5) Given robust extremes, information can be pooled from nearby ρ reduction in uncertainty due to parameter estimation, cfr. grey bands in Fig 3. Assume functional forms μ(ρ)= μ 0 + μ 1 ρ, σ (ρ)= σ 0 + σ 1 ρ, ξ (ρ)= ξ 0 . ξ constant in ρ: approximation, only valid locally. Estimate (μ 0 ,μ 1 ,σ 0 ,σ 1 ,ξ 0 ) by maximum likelihood. Prediction & non-stationarity Robustness of extremes interpreting and predicting non-stationary extremes. Robust extreme windspeeds are found in a simple two- layer quasi-geostrophic model [2]: smooth dependence of windspeed return levels wrt baro- clinic forcing parameter T E in stationary case. 10 15 20 25 30 20 40 60 80 100 120 100-yr return levels windspeed (m/s) T E F IG . 4: 100-year windspeed return levels at centre of lower layer, for different values of T E (non-pooled GEV fits, stationary case). Introduce linear time trend in QG model: T E (t)=(T 0 E - 1) + t ΔT E , t ∈ [0,t 0 ], ΔT E =2/300yrs. Ansatzen: adiabatic + slow trend. 1. trend speed ΔT E is sufficiently small wrt sampling time for upper tail of windspeed distribution; 2. non-stationary extremes remain close (locally in time) to those of stationary system for “frozen” T E (t). = ⇒ robustness of extremes wrt control parameter trans- lates to smooth change of extremes wrt time. We adopt the Generalized Additive Models for Location, Scale and Shape (GAMLSS) [3]: 1. response distribution is GEV with constant ξ and cubic smoothing spline for (μ, σ ) with identity link; 2. split sequence of yearly maxima into training and test set (years 1-2250 and 2251-3000); 3. fit non-stationary GEV-GAMLSS to training set; 4. compute time-dependent quantiles and compare to training and test set. 0 500 1000 1500 2000 2500 3000 20 40 60 80 100 120 Time (years) Windspeed (m/s) F IG . 5: Points: observed yearly windspeed max- ima during training (black) and test (blue) periods. Curves: time-dependent estimated quantiles from GEV-GAMLSS. quantiles 0.4 2 10 25 50 75 90 98 99.6 training 0.5 2.3 9.5 25.2 50.3 76.1 90.0 98.0 99.6 test 0.7 3.6 14.3 30.5 51.7 74.7 91.3 97.7 99.3 Fraction of points below the estimated quantile curves in Fig. 5 (corresp. to top row) during training (green, centre row) and test (red, bottom row) periods. Illustrates potential for predicting return levels in a non- stationary system exhibiting robust extremes. References [1] Morales, C. A., Pacifico, M. J., and Pujals, E. R. Proc. Amer. Math. Soc. 127(11), 3393–3401 (1999). [2] Felici, M., Lucarini, V., Speranza, A., and Vitolo, R. J. Atmos. Sci. 64(7), 2137–2158 Jul (2007). [3] Rigby, R. A. and Stasinopoulos, D. M. J. Roy. Statist. Soc. Ser. C 54(3), 507–554 (2005).
Transcript of Robust Extremes in Chaotic Deterministic...

Robust Extremes in Chaotic Deterministic SystemsRenato Vitolo, Mark P. Holland, Christopher A.T. Ferro
School of Engineering, Computing and Mathematics, University of Exeter (www.secam.ex.ac.uk/xcs/).
The concept
A chaotic deterministic system fρ has robust extremesunder observable φ when the associated extreme valuestatistics depend smoothly on control parameter ρ.
Results
Robustness of extremes:
1. depends on system fρ and on observable φ;
2. allows improved estimates by pooling data and
3. improved prediction of (non-stationary) return levels.
Phenomenology
Robustness of extremes depends on the system fρ and onthe observable φ.
Illustration for Lorenz63 model with σ = 10, β = 8
3:
x = σ(y − x), y = x(ρ − z) − y, z = xy − βz. (1)
For ρ = 28: (1) has robust strange attractor [1]. Let
φ1(x, y, z) = x, φ2(x, y, z) = 1 − |x − 5|0.25. (2)
Generate time series of length 10n units (recorded every0.5) and extract maxima over blocks of 1000 time units.Fit generalised extreme value (GEV) distribution:
G(x; µ, σ, ξ) = exp
[
−
(
1 + ξx − µ
σ
)−1/ξ
+
]
. (3)
30 40 50 60
−0.
25−
0.21
−0.
17 φ1 = x
φ2 = 1 − |x − 5|0.25
ξ
ρ
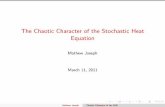
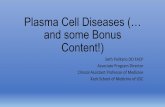
FIG. 1: Maximum likelihood estimates of ξ for ob-servables φ1 and φ2 in (2), for ρj = 27 + j, j = 0, 1, . . .
φ1: for small ρ (≈ 28), ξ varies smoothly with ρ. Non-linear scaling of attractor shape of ξ(ρ). Discontinuousfor large ρ due to hyperbolicity loss (folds in return map).
φ2: ξ(ρ) = 0.25 is constant even under hyperbolicity loss.
Rigorous proof available for 1D Lorenz maps.
−3 −2 −1 0 1 2 3 4
−3
−2
−1
01
23
4
−3 −2 −1 0 1 2 3 4
ρ=
58
ρ = 59 ρ = 60
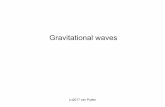
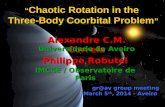
FIG. 2: Discontinuity in upper tail at ρ = 59 for φ1
(quantile-quantile plot of 104 maxima from Fig 1, foreach ρ = 58, 59, 60).
Pooling dataRobustness of extremes enhanced precision of GEV
estimators.17
.417
.617
.8
n=5n=8
0.4
0.5
0.6
27.0 27.4 27.8
−0.
4−
0.2
0
n=5 pooledn=8
27.0 27.4 27.8
µσ
ξ
ρρ
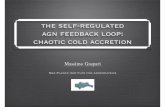
FIG. 3: Left: GEV parameter estimates for (1) withn = 5 (dashed, 95% conf. int. in gray) and n = 8(solid). Right: “pooled” estimates with n = 5(dashed, 95% conf. int. in gray).
Large n: GEV parameter estimates → smooth functionsof ρ (solid lines in Fig 3, n = 8).Small n: wild oscillations around “true values” (dashedlines, left column in Fig 3, n = 5).
Enhanced precision: “pooling” short series (n = 5)Given robust extremes, information can be pooled fromnearby ρ reduction in uncertainty due to parameter estimation,cfr. grey bands in Fig 3. Assume functional forms
µ(ρ) = µ0 + µ1ρ, σ(ρ) = σ0 + σ1ρ, ξ(ρ) = ξ0.
ξ constant in ρ: approximation, only valid locally.Estimate (µ0, µ1, σ0, σ1, ξ0) by maximum likelihood.
Prediction & non-stationarity
Robustness of extremes interpreting and predictingnon-stationary extremes.
Robust extreme windspeeds are found in a simple two-layer quasi-geostrophic model [2]:smooth dependence of windspeed return levels wrt baro-clinic forcing parameter TE in stationary case.
10 15 20 25 30
2040
6080
100
120
100−yr return levels
win
dspe
ed (
m/s
)
TE
FIG. 4: 100-year windspeed return levels at centre oflower layer, for different values of TE (non-pooledGEV fits, stationary case).
Introduce linear time trend in QG model:
TE(t) = (T 0
E − 1) + t ∆TE, t ∈ [0, t0], ∆TE = 2/300yrs.
Ansatzen: adiabatic + slow trend.
1. trend speed ∆TE is sufficiently small wrt samplingtime for upper tail of windspeed distribution;
2. non-stationary extremes remain close (locally in time)to those of stationary system for “frozen” TE(t).
=⇒ robustness of extremes wrt control parameter trans-lates to smooth change of extremes wrt time.
We adopt the Generalized Additive Models for Location,Scale and Shape (GAMLSS) [3]:
1. response distribution is GEVwith constant ξ and cubicsmoothing spline for (µ, σ) with identity link;
2. split sequence of yearly maxima into training and testset (years 1-2250 and 2251-3000);
3. fit non-stationary GEV-GAMLSS to training set;
4. compute time-dependent quantiles and compare totraining and test set.
0 500 1000 1500 2000 2500 3000
2040
6080
100
120
Time (years)
Win
dspe
ed (
m/s
)
FIG. 5: Points: observed yearly windspeed max-ima during training (black) and test (blue) periods.Curves: time-dependent estimated quantiles fromGEV-GAMLSS.
quantiles 0.4 2 10 25 50 75 90 98 99.6training 0.5 2.3 9.5 25.2 50.3 76.1 90.0 98.0 99.6test 0.7 3.6 14.3 30.5 51.7 74.7 91.3 97.7 99.3
Fraction of points below the estimated quantile curves inFig. 5 (corresp. to top row) during training (green, centrerow) and test (red, bottom row) periods.
Illustrates potential for predicting return levels in a non-stationary system exhibiting robust extremes.
References
[1] Morales, C. A., Pacifico, M. J., and Pujals, E. R. Proc.Amer. Math. Soc. 127(11), 3393–3401 (1999).
[2] Felici, M., Lucarini, V., Speranza, A., and Vitolo, R. J.Atmos. Sci. 64(7), 2137–2158 Jul (2007).
[3] Rigby, R. A. and Stasinopoulos, D. M. J. Roy. Statist.Soc. Ser. C 54(3), 507–554 (2005).












![and New Adaptive Evaluation of Chaotic Time Seriesewh.ieee.org/cmte/cis/mtsc/ieeecis/tutorial2008/ieee_ical2008/... · and evaluation of chaotic time series: [26] Vitkaj, J.: Analysis](https://static.fdocument.org/doc/165x107/5f0d44e17e708231d43981e6/and-new-adaptive-evaluation-of-chaotic-time-and-evaluation-of-chaotic-time-series.jpg)