Respuesta en Frecuencia de Sistemas Continuosadelantada/retrasada en el factor h(ω). Nótese que...
27
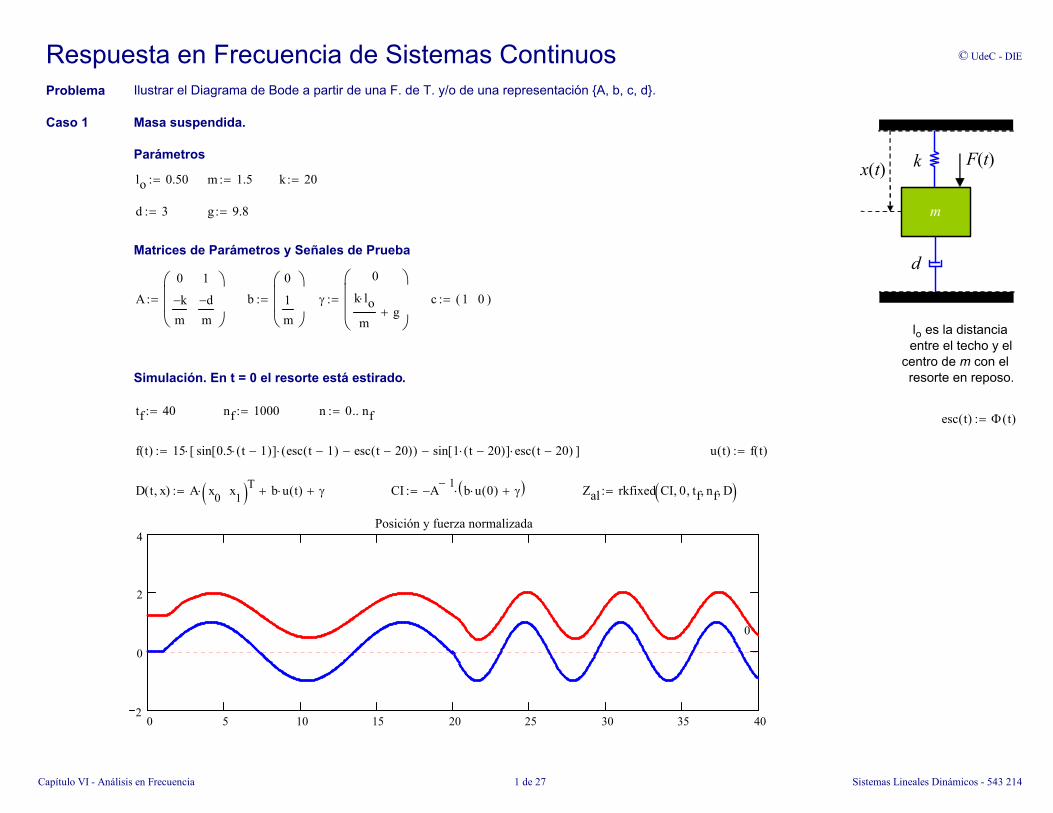
© UdeC - DIE 0 5 10 15 20 25 30 35 40 2 0 2 4 Posición y fuerza normalizada 0 Z al rkfixed CI 0 , t f , n f , D , ( ) := CI A 1 - - bu0 () ⋅ γ + ( ) ⋅ := Dtx , ( ) A x 0 x 1 ( ) T ⋅ but () ⋅ + γ + := ut () ft () := ft () 15 sin 0.5 t 1 - ( ) ⋅ [ ] esc t 1 - ( ) esc t 20 - ( ) - ( ) ⋅ sin 1 t 20 - ( ) ⋅ [ ] esc t 20 - ( ) ⋅ - [ ] ⋅ := esc t () Φ t () := n 0 n f .. := n f 1000 := t f 40 := Simulación. En t = 0 el resorte está estirado. l o es la distancia entre el techo y el centro de m con el resorte en reposo. c 1 0 ( ) := γ 0 kl o ⋅ m g + := b 0 1 m := A 0 k - m 1 d - m := Matrices de Parámetros y Señales de Prueba g 9.8 := d 3 := k 20 := m 1.5 := l o 0.50 := Parámetros Masa suspendida. Caso 1 k d F(t) m x(t) Ilustrar el Diagrama de Bode a partir de una F. de T. y/o de una representación {A, b, c, d}. Problema Respuesta en Frecuencia de Sistemas Continuos Capítulo VI - Análisis en Frecuencia 1 de 27 Sistemas Lineales Dinámicos - 543 214
Transcript of Respuesta en Frecuencia de Sistemas Continuosadelantada/retrasada en el factor h(ω). Nótese que...
© UdeC - DIE
0 5 10 15 20 25 30 35 402
0
2
4Posición y fuerza normalizada
0
Zal rkfixed CI 0, tf, nf, D,( ):=CI A1−
− b u 0( )⋅ γ+( )⋅:=D t x,( ) A x0x1( )T⋅ b u t( )⋅+ γ+:=
u t( ) f t( ):=f t( ) 15 sin 0.5 t 1−( )⋅[ ] esc t 1−( ) esc t 20−( )−( )⋅ sin 1 t 20−( )⋅[ ] esc t 20−( )⋅−[ ]⋅:=
esc t( ) Φ t( ):=n 0 nf..:=nf 1000:=tf 40:=
Simulación. En t = 0 el resorte está estirado.
lo es la distancia
entre el techo y el
centro de m con el
resorte en reposo.
c 1 0( ):=γ
0
k lo⋅
mg+
:=b
0
1
m
:=A
0
k−
m
1
d−
m
:=
Matrices de Parámetros y Señales de Prueba
g 9.8:=d 3:=
k 20:=m 1.5:=lo 0.50:=
Parámetros
Masa suspendida.Caso 1
k
d
F(t)
m
x(t)
Ilustrar el Diagrama de Bode a partir de una F. de T. y/o de una representación A, b, c, d.Problema
Respuesta en Frecuencia de Sistemas Continuos
Capítulo VI - Análisis en Frecuencia 1 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
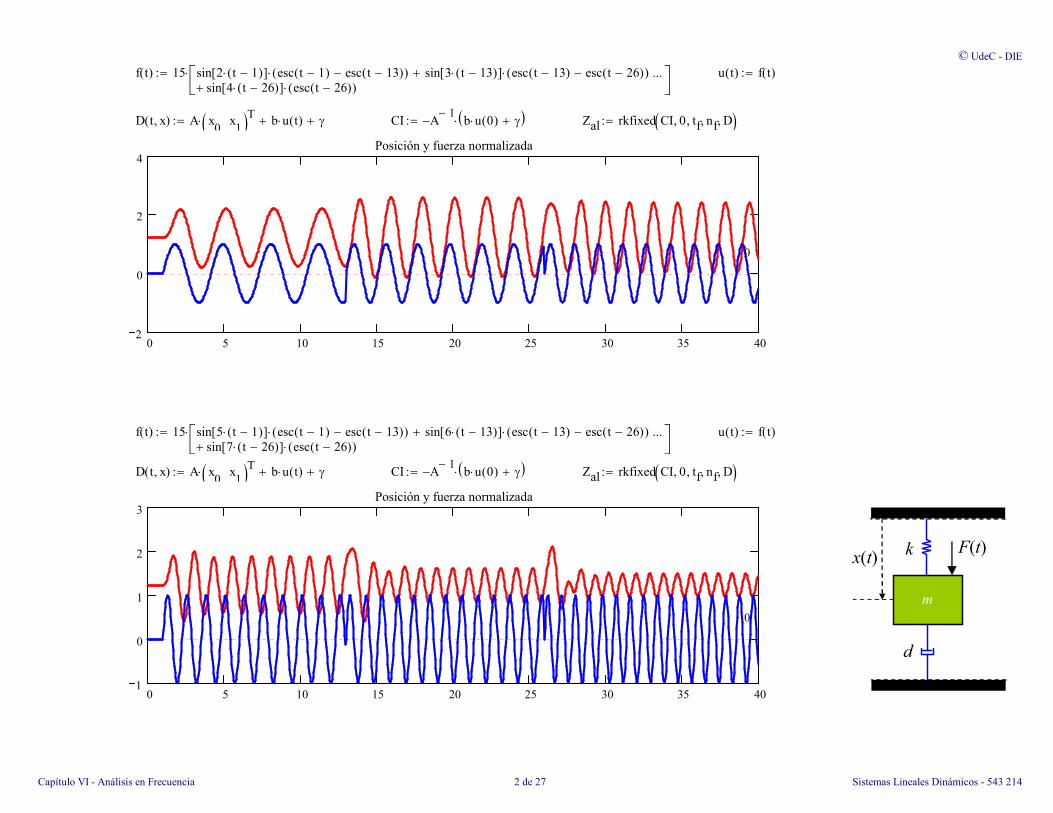
f t( ) 15 sin 2 t 1−( )⋅[ ] esc t 1−( ) esc t 13−( )−( )⋅ sin 3 t 13−( )⋅[ ] esc t 13−( ) esc t 26−( )−( )⋅+sin 4 t 26−( )⋅[ ] esc t 26−( )( )⋅+
...
⋅:= u t( ) f t( ):=
D t x,( ) A x0x1( )T⋅ b u t( )⋅+ γ+:= CI A
1−− b u 0( )⋅ γ+( )⋅:= Zal rkfixed CI 0, tf, nf, D,( ):=
0 5 10 15 20 25 30 35 402
0
2
4Posición y fuerza normalizada
0
f t( ) 15 sin 5 t 1−( )⋅[ ] esc t 1−( ) esc t 13−( )−( )⋅ sin 6 t 13−( )⋅[ ] esc t 13−( ) esc t 26−( )−( )⋅+sin 7 t 26−( )⋅[ ] esc t 26−( )( )⋅+
...
⋅:= u t( ) f t( ):=
D t x,( ) A x0x1( )T⋅ b u t( )⋅+ γ+:= CI A
1−− b u 0( )⋅ γ+( )⋅:= Zal rkfixed CI 0, tf, nf, D,( ):=
0 5 10 15 20 25 30 35 401
0
1
2
3Posición y fuerza normalizada
0
k
d
F(t)
m
x(t)
Capítulo VI - Análisis en Frecuencia 2 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
k
d
F(t)
m
x(t)
0 2 4 6 8 10200
150
100
50
0
Fase
0 2 4 6 8 100
0.025
0.05
0.075
0.1
Magnitud
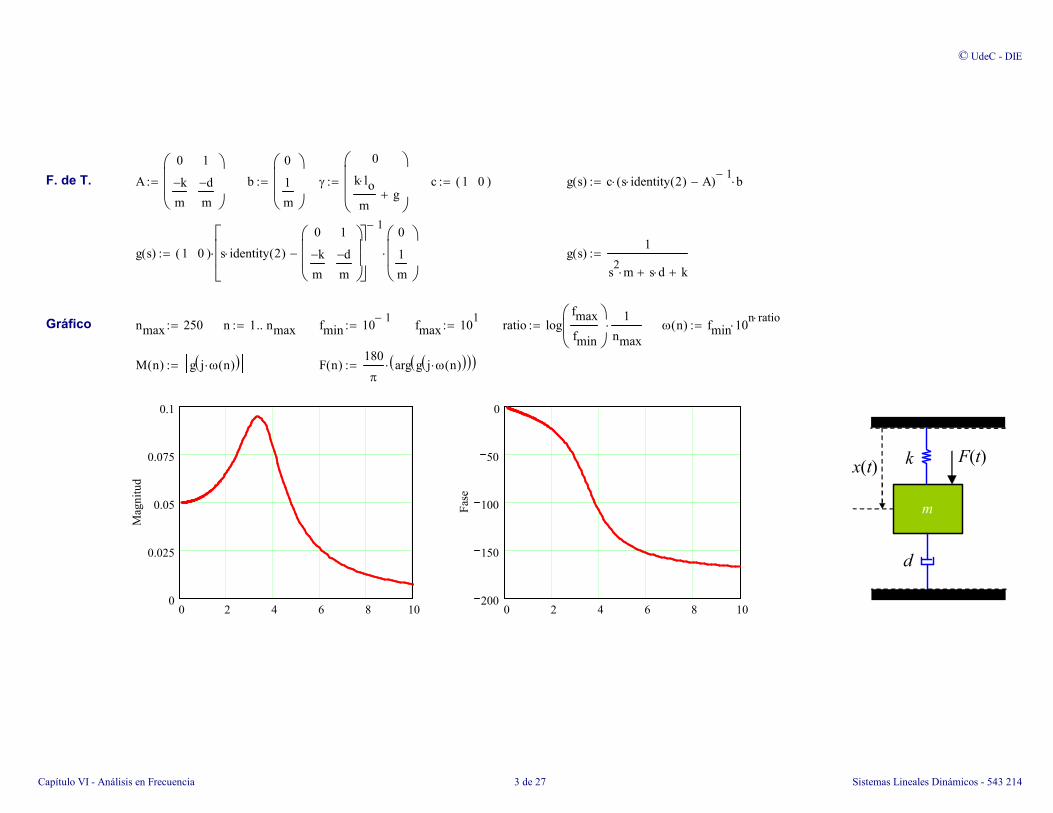
F n( )180
πarg g j ω n( )⋅( )( )( )⋅:=M n( ) g j ω n( )⋅( ):=
ω n( ) fmin 10n ratio⋅
⋅:=ratio logfmax
fmin
1
nmax
⋅:=fmax 101
:=fmin 101−
:=n 1 nmax..:=nmax 250:=Gráfico
g s( )1
s2m⋅ s d⋅+ k+
:=g s( ) 1 0( ) s identity 2( )⋅
0
k−
m
1
d−
m
−
1−
⋅
0
1
m
⋅:=
g s( ) c s identity 2( )⋅ A−( )1−
⋅ b⋅:=c 1 0( ):=γ
0
k lo⋅
mg+
:=b
0
1
m
:=A
0
k−
m
1
d−
m
:=F. de T.
Capítulo VI - Análisis en Frecuencia 3 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIEDiagrama de Bode
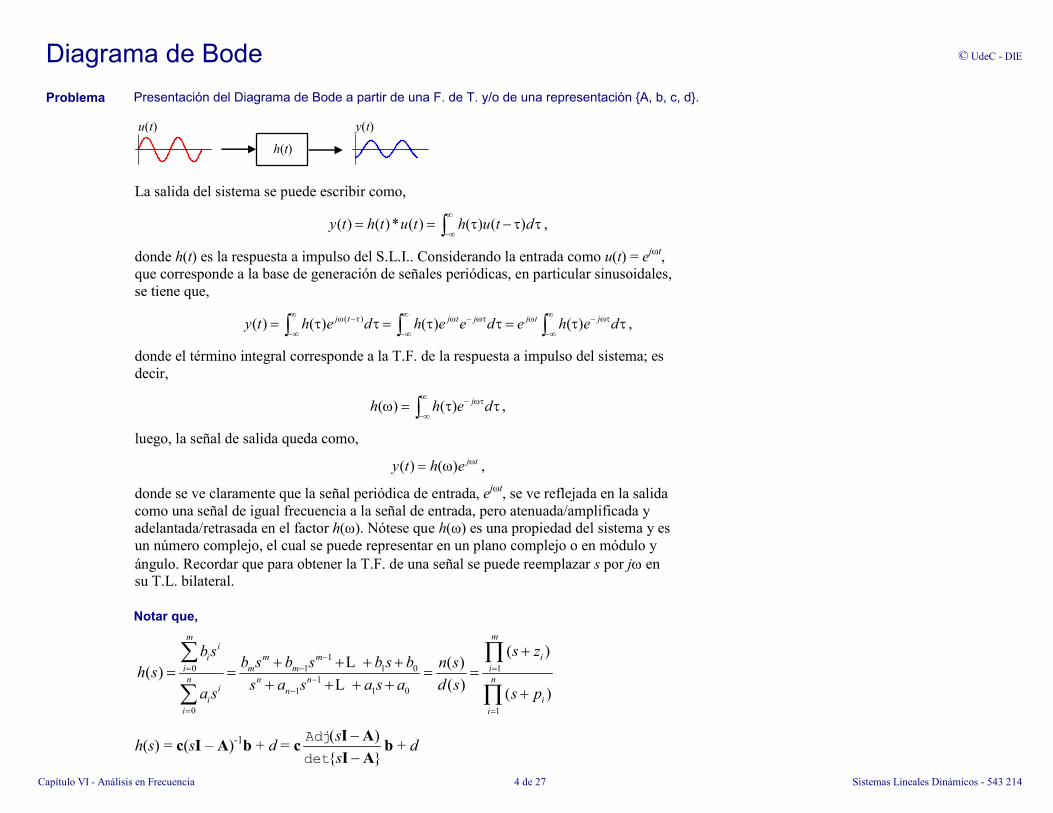
Problema Presentación del Diagrama de Bode a partir de una F. de T. y/o de una representación A, b, c, d.
h(t)
u(t) y(t)
La salida del sistema se puede escribir como,
( ) ( )* ( ) ( ) ( )y t h t u t h u t d∞
−∞= = τ − τ τ∫ ,
donde h(t) es la respuesta a impulso del S.L.I.. Considerando la entrada como u(t) = ejωt,
que corresponde a la base de generación de señales periódicas, en particular sinusoidales,
se tiene que,
( )
( ) ( ) ( ) ( )j t j t j j t j
y t h e d h e e d e h e d∞ ∞ ∞ω −τ ω − ωτ ω − ωτ
−∞ −∞ −∞= τ τ = τ τ = τ τ∫ ∫ ∫ ,
donde el término integral corresponde a la T.F. de la respuesta a impulso del sistema; es
decir,
( ) ( )j
h h e d∞ − ωτ
−∞ω = τ τ∫ ,
luego, la señal de salida queda como,
( ) ( ) j ty t h e ω= ω ,
donde se ve claramente que la señal periódica de entrada, ejωt, se ve reflejada en la salida
como una señal de igual frecuencia a la señal de entrada, pero atenuada/amplificada y
adelantada/retrasada en el factor h(ω). Nótese que h(ω) es una propiedad del sistema y es
un número complejo, el cual se puede representar en un plano complejo o en módulo y
ángulo. Recordar que para obtener la T.F. de una señal se puede reemplazar s por jω en su T.L. bilateral.
Notar que,
1
0 1 1 0 1
1
1 1 0
0 1
( )( )
( )( )
( )
mmi
m m ii
i m m i
n nn ni n
i i
i i
s zb sb s b s b s b n s
h ss a s a s a d s
a s s p
−= − =
−−
= =
++ + + +
= = = =+ + + + +
∑ ∏
∑ ∏L
L
h(s) = c(sI – A)-1b + d = c( )
s
s
−−I A
I A
Adj
detb + d
Capítulo VI - Análisis en Frecuencia 4 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
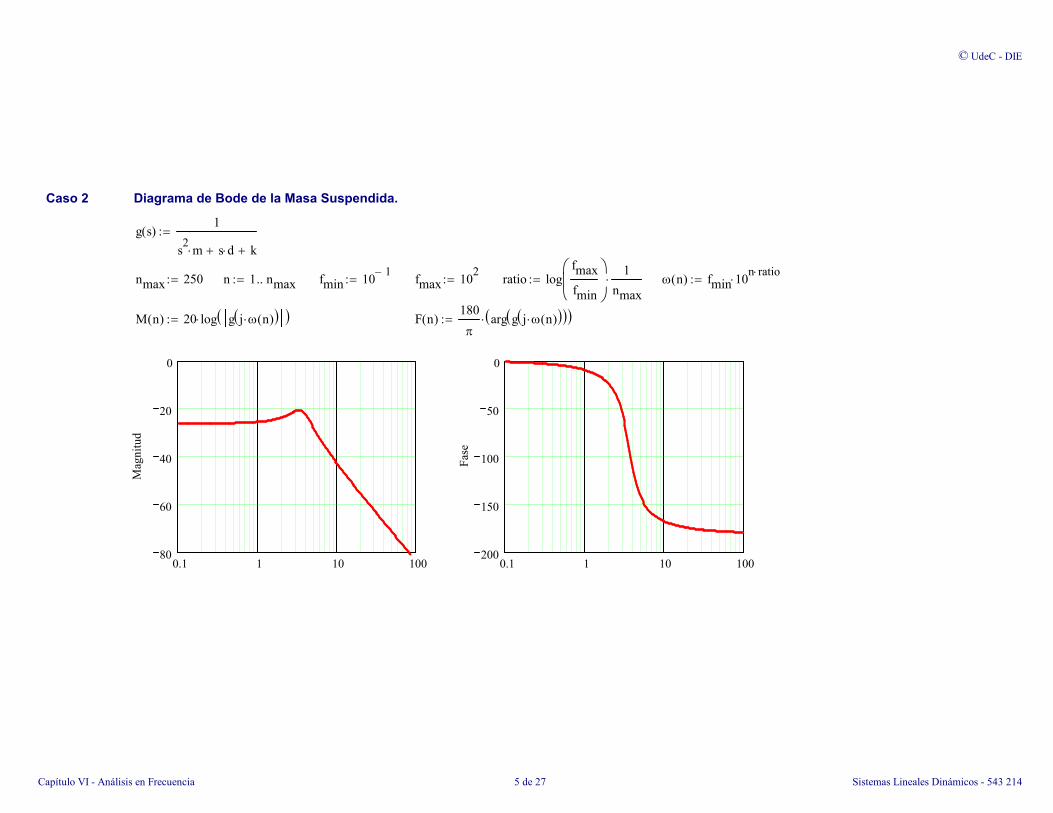
Caso 2 Diagrama de Bode de la Masa Suspendida.
g s( )1
s2m⋅ s d⋅+ k+
:=
nmax 250:= n 1 nmax..:= fmin 101−
:= fmax 102
:= ratio logfmax
fmin
1
nmax
⋅:= ω n( ) fmin 10n ratio⋅
⋅:=
M n( ) 20 log g j ω n( )⋅( )( )⋅:= F n( )180
πarg g j ω n( )⋅( )( )( )⋅:=
0.1 1 10 10080
60
40
20
0
Magnitud
0.1 1 10 100200
150
100
50
0
Fase
Capítulo VI - Análisis en Frecuencia 5 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
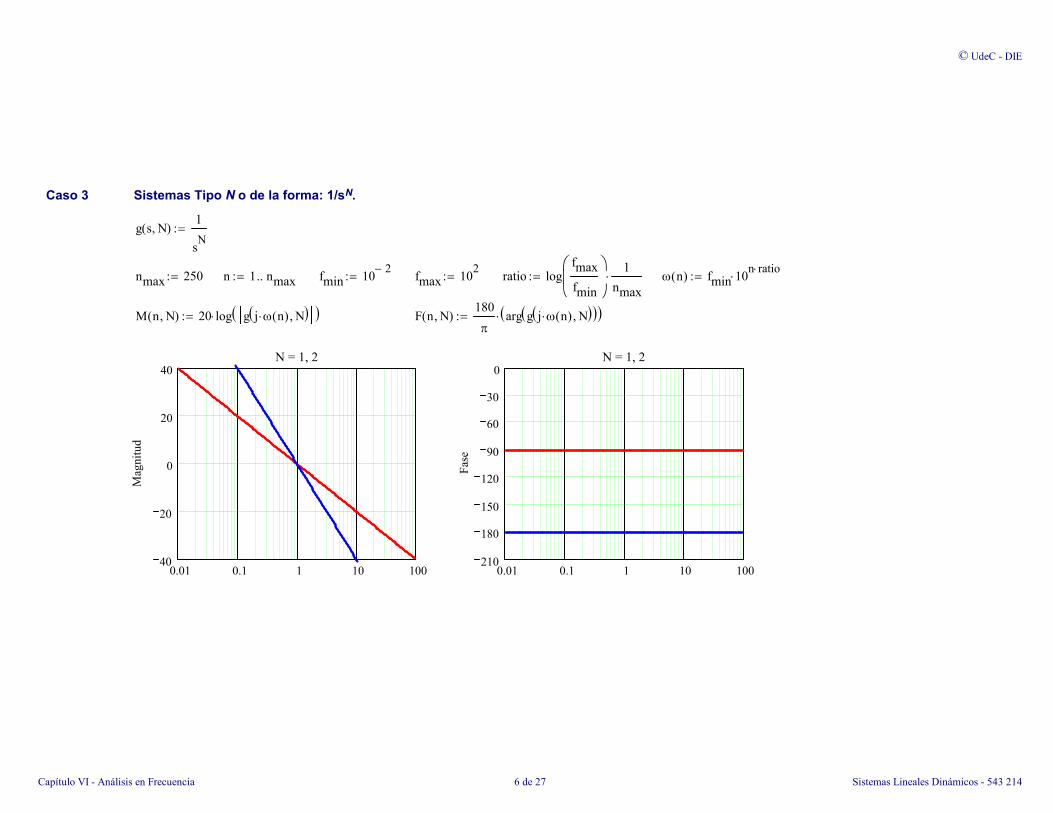
Caso 3 Sistemas Tipo N o de la forma: 1/sN.
g s N,( )1
sN
:=
nmax 250:= n 1 nmax..:= fmin 102−
:= fmax 102
:= ratio logfmax
fmin
1
nmax
⋅:= ω n( ) fmin 10n ratio⋅
⋅:=
M n N,( ) 20 log g j ω n( )⋅ N,( )( )⋅:= F n N,( )180
πarg g j ω n( )⋅ N,( )( )( )⋅:=
0.01 0.1 1 10 10040
20
0
20
40N = 1, 2
Magnitud
0.01 0.1 1 10 100210
180
150
120
90
60
30
0N = 1, 2
Fase
Capítulo VI - Análisis en Frecuencia 6 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
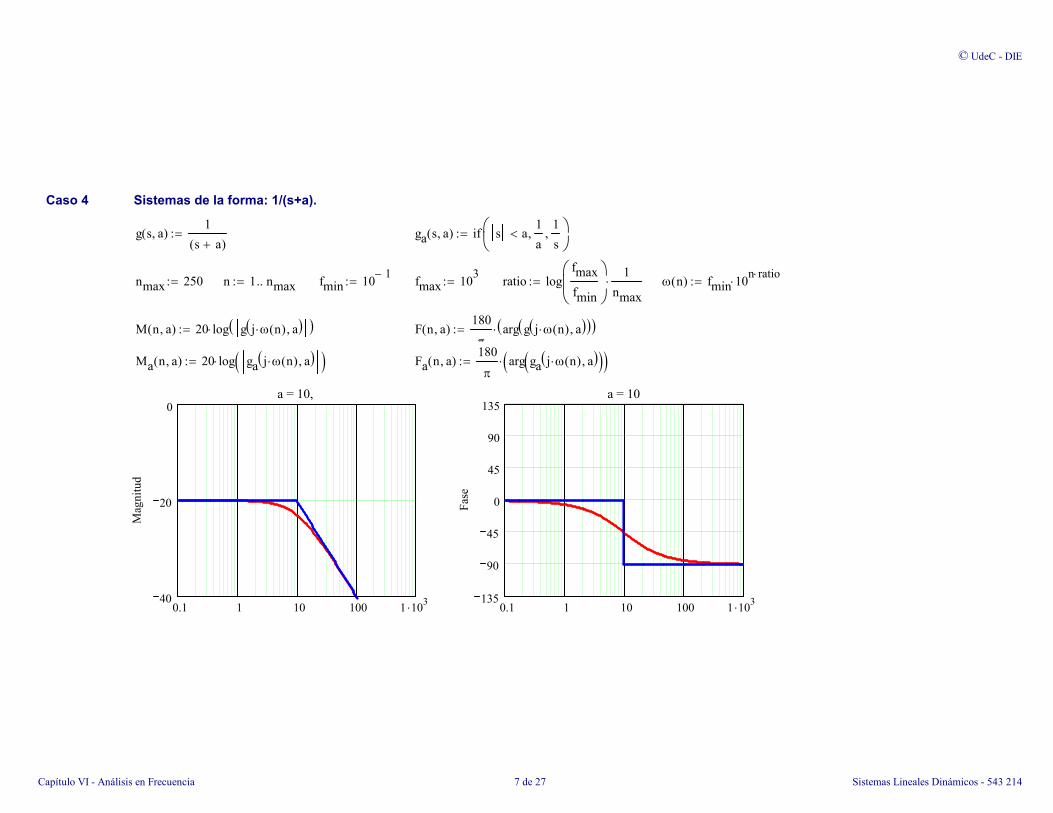
Caso 4 Sistemas de la forma: 1/(s+a).
g s a,( )1
s a+( ):= ga s a,( ) if s a<
1
a,
1
s,
:=
nmax 250:= n 1 nmax..:= fmin 101−
:= fmax 103
:= ratio logfmax
fmin
1
nmax
⋅:= ω n( ) fmin 10n ratio⋅
⋅:=
M n a,( ) 20 log g j ω n( )⋅ a,( )( )⋅:= F n a,( )180
πarg g j ω n( )⋅ a,( )( )( )⋅:=
Ma n a,( ) 20 log ga j ω n( )⋅ a,( )( )⋅:= Fa n a,( )180
πarg ga j ω n( )⋅ a,( )( )( )⋅:=
0.1 1 10 100 1 .10340
20
0a = 10,
Magnitud
0.1 1 10 100 1 .103135
90
45
0
45
90
135a = 10
Fase
Capítulo VI - Análisis en Frecuencia 7 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
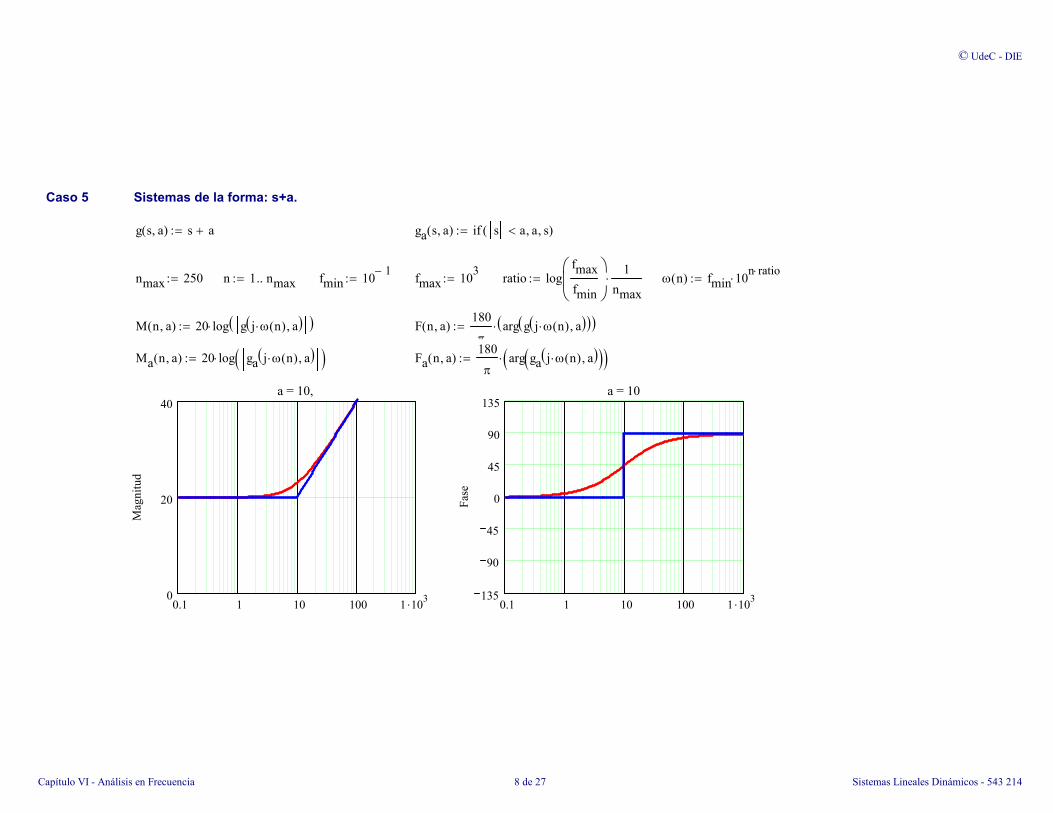
Caso 5 Sistemas de la forma: s+a.
g s a,( ) s a+:= ga s a,( ) if s a< a, s,( ):=
nmax 250:= n 1 nmax..:= fmin 101−
:= fmax 103
:= ratio logfmax
fmin
1
nmax
⋅:= ω n( ) fmin 10n ratio⋅
⋅:=
M n a,( ) 20 log g j ω n( )⋅ a,( )( )⋅:= F n a,( )180
πarg g j ω n( )⋅ a,( )( )( )⋅:=
Ma n a,( ) 20 log ga j ω n( )⋅ a,( )( )⋅:= Fa n a,( )180
πarg ga j ω n( )⋅ a,( )( )( )⋅:=
0.1 1 10 100 1 .1030
20
40a = 10,
Magnitud
0.1 1 10 100 1 .103135
90
45
0
45
90
135a = 10
Fase
Capítulo VI - Análisis en Frecuencia 8 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
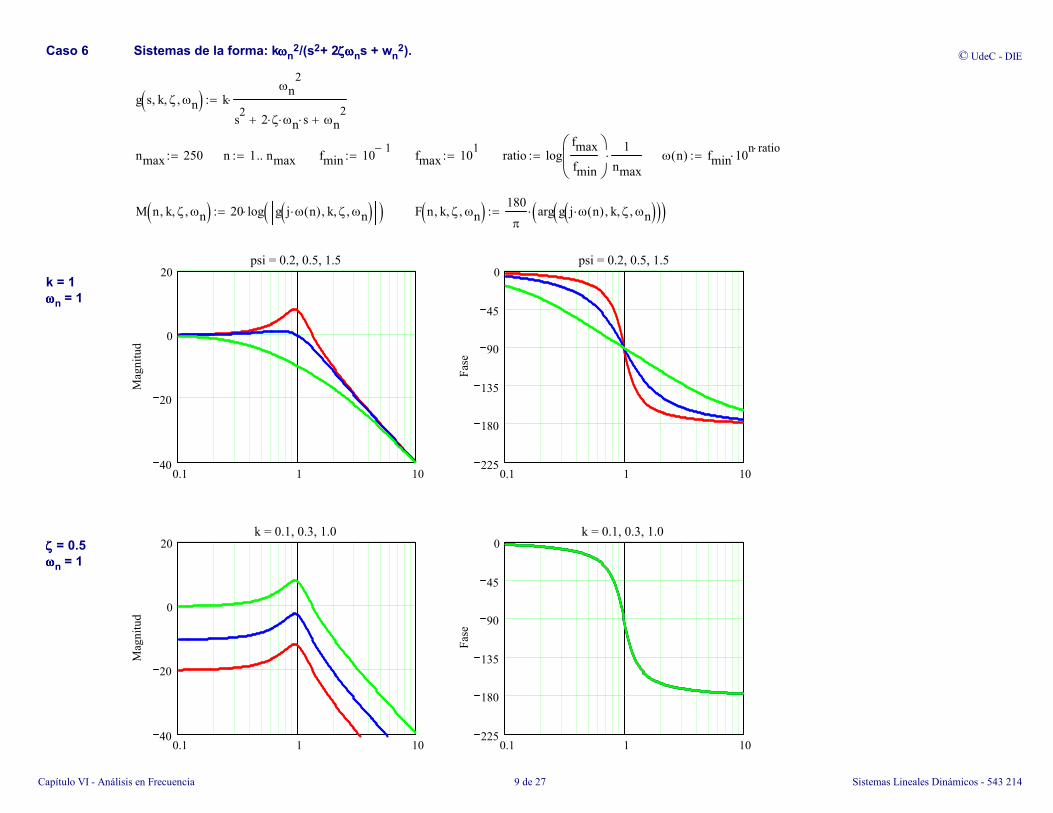
ζζζζ = 0.5ωωωωn = 1
0.1 1 10225
180
135
90
45
0k = 0.1, 0.3, 1.0
Fase
0.1 1 1040
20
0
20k = 0.1, 0.3, 1.0
Magnitud
k = 1
ωωωωn = 1
0.1 1 10225
180
135
90
45
0psi = 0.2, 0.5, 1.5
Fase
0.1 1 1040
20
0
20psi = 0.2, 0.5, 1.5
Magnitud
F n k, ζ, ωn,( ) 180
πarg g j ω n( )⋅ k, ζ, ωn,( )( )( )⋅:=M n k, ζ, ωn,( ) 20 log g j ω n( )⋅ k, ζ, ωn,( )( )⋅:=
ω n( ) fmin 10n ratio⋅
⋅:=ratio logfmax
fmin
1
nmax
⋅:=fmax 101
:=fmin 101−
:=n 1 nmax..:=nmax 250:=
g s k, ζ, ωn,( ) kωn
2
s2
2 ζ⋅ ωn⋅ s⋅+ ωn2
+
⋅:=
Sistemas de la forma: kωωωωn2/(s2+ 2ζζζζωωωωns + wn
2).Caso 6
Capítulo VI - Análisis en Frecuencia 9 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
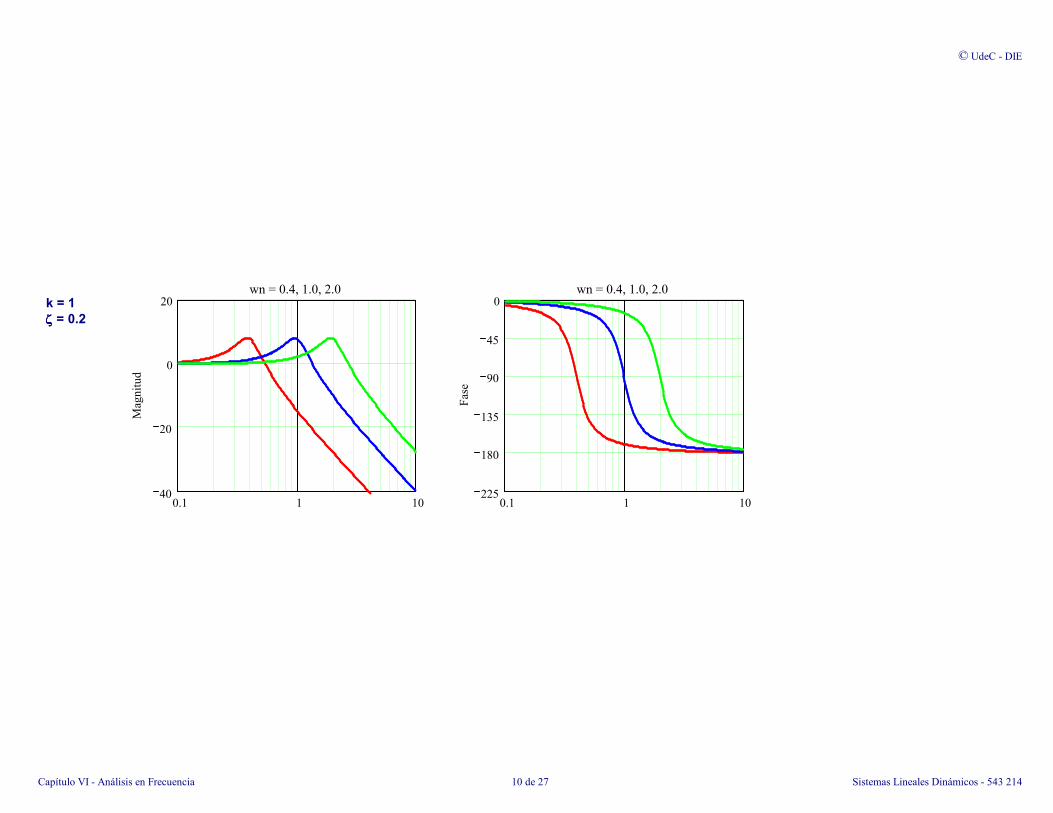
0.1 1 1040
20
0
20wn = 0.4, 1.0, 2.0
Magnitud
0.1 1 10225
180
135
90
45
0wn = 0.4, 1.0, 2.0
Fase
k = 1
ζζζζ = 0.2
Capítulo VI - Análisis en Frecuencia 10 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
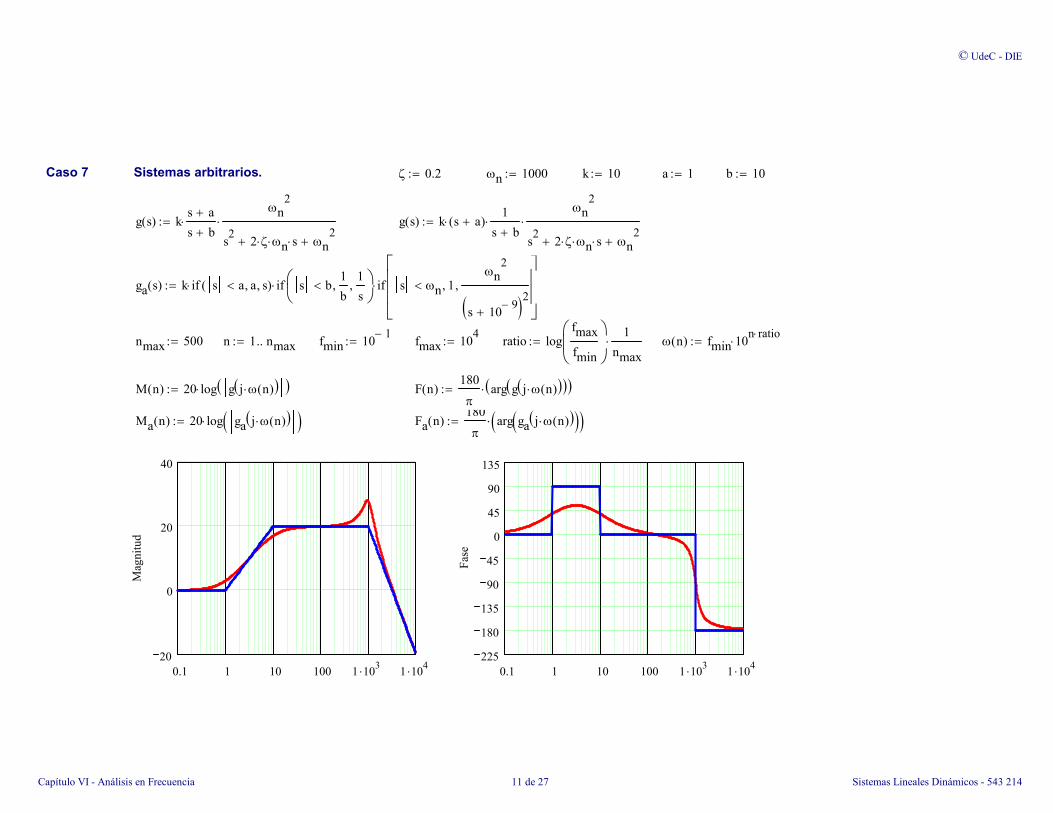
0.1 1 10 100 1 .103 1 .104225
180
135
90
45
0
45
90
135Fase
0.1 1 10 100 1 .103 1 .10420
0
20
40
Magnitud
Fa n( )180
πarg ga j ω n( )⋅( )( )( )⋅:=Ma n( ) 20 log ga j ω n( )⋅( )( )⋅:=
F n( )180
πarg g j ω n( )⋅( )( )( )⋅:=M n( ) 20 log g j ω n( )⋅( )( )⋅:=
ω n( ) fmin 10n ratio⋅
⋅:=ratio logfmax
fmin
1
nmax
⋅:=fmax 104
:=fmin 101−
:=n 1 nmax..:=nmax 500:=
ga s( ) k if s a< a, s,( )⋅ if s b<1
b,
1
s,
⋅ if s ωn< 1,ωn
2
s 109−
+( )2,
⋅:=
g s( ) k s a+( )⋅1
s b+⋅
ωn2
s2
2 ζ⋅ ωn⋅ s⋅+ ωn2
+
⋅:=g s( ) ks a+
s b+⋅
ωn2
s2
2 ζ⋅ ωn⋅ s⋅+ ωn2
+
⋅:=
b 10:=a 1:=k 10:=ωn 1000:=ζ 0.2:=Sistemas arbitrarios.Caso 7
Capítulo VI - Análisis en Frecuencia 11 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
0.01 0.1 1 10180
150
120
90
60
30
0
30
Fase
0.01 0.1 1 1020
0
20
40
Magnitud
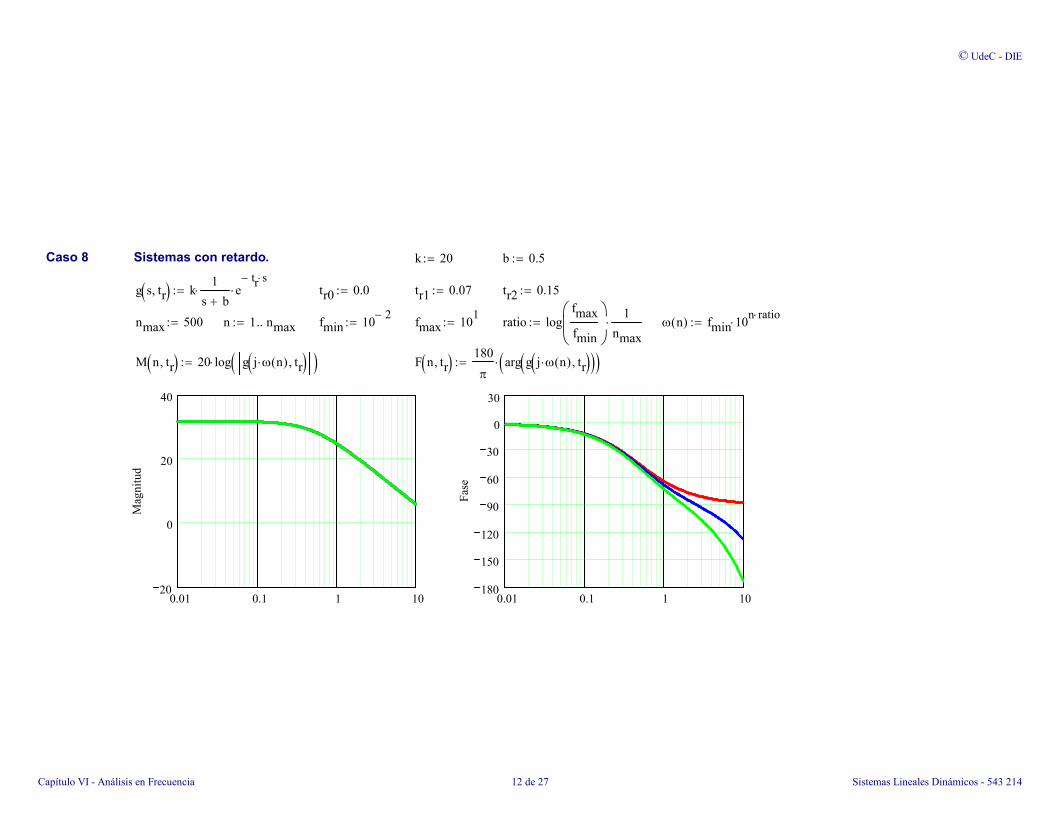
F n tr,( ) 180
πarg g j ω n( )⋅ tr,( )( )( )⋅:=M n tr,( ) 20 log g j ω n( )⋅ tr,( )( )⋅:=
ω n( ) fmin 10n ratio⋅
⋅:=ratio logfmax
fmin
1
nmax
⋅:=fmax 101
:=fmin 102−
:=n 1 nmax..:=nmax 500:=
tr2 0.15:=tr1 0.07:=tr0 0.0:=g s tr,( ) k1
s b+⋅ e
tr− s⋅⋅:=
b 0.5:=k 20:=Sistemas con retardo.Caso 8
Capítulo VI - Análisis en Frecuencia 12 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
gwTl s( )1−
Jl
if s zw1−< zw1−, s,( )⋅ if s p1−<1
p1−,
1
s,
⋅ if s p2−<1
p2−,
1
s,
⋅:=
gwva s( )km
Jl L⋅if s p1−<
1
p1−,
1
s,
⋅ if s p2−<1
p2−,
1
s,
⋅:=
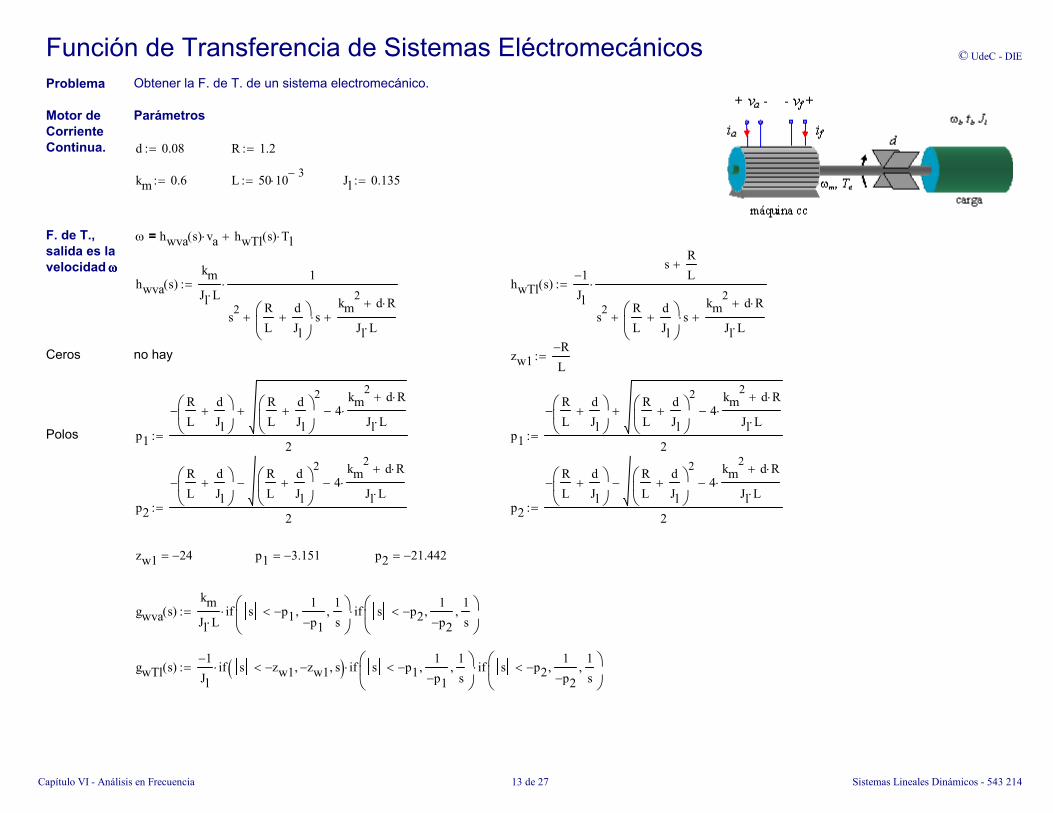
p2 21.442−=p1 3.151−=zw1 24−=
p2
R
L
d
Jl
+
−R
L
d
Jl
+
2
4km
2d R⋅+
Jl L⋅⋅−−
2:=p2
R
L
d
Jl
+
−R
L
d
Jl
+
2
4km
2d R⋅+
Jl L⋅⋅−−
2:=
p1
R
L
d
Jl
+
−R
L
d
Jl
+
2
4km
2d R⋅+
Jl L⋅⋅−+
2:=p1
R
L
d
Jl
+
−R
L
d
Jl
+
2
4km
2d R⋅+
Jl L⋅⋅−+
2:=Polos
zw1R−
L:=no hayCeros
hwTl s( )1−
Jl
sR
L+
s2 R
L
d
Jl
+
s⋅+
km2
d R⋅+
Jl L⋅+
⋅:=hwva s( )km
Jl L⋅
1
s2 R
L
d
Jl
+
s⋅+
km2
d R⋅+
Jl L⋅+
⋅:=
ω hwva s( ) va⋅ hwTl s( ) Tl⋅+=F. de T.,
salida es la
velocidad ωωωω
Jl 0.135:=L 50 103−
⋅:=km 0.6:=
R 1.2:=d 0.08:=
ParámetrosMotor de
Corriente
Continua.
Obtener la F. de T. de un sistema electromecánico.Problema
Función de Transferencia de Sistemas Eléctromecánicos
Capítulo VI - Análisis en Frecuencia 13 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
0.1 1 10 100 1 .103360
270
180
90
0
90Fase
0.1 1 10 100 1 .10360
40
20
0
20
Magnitud
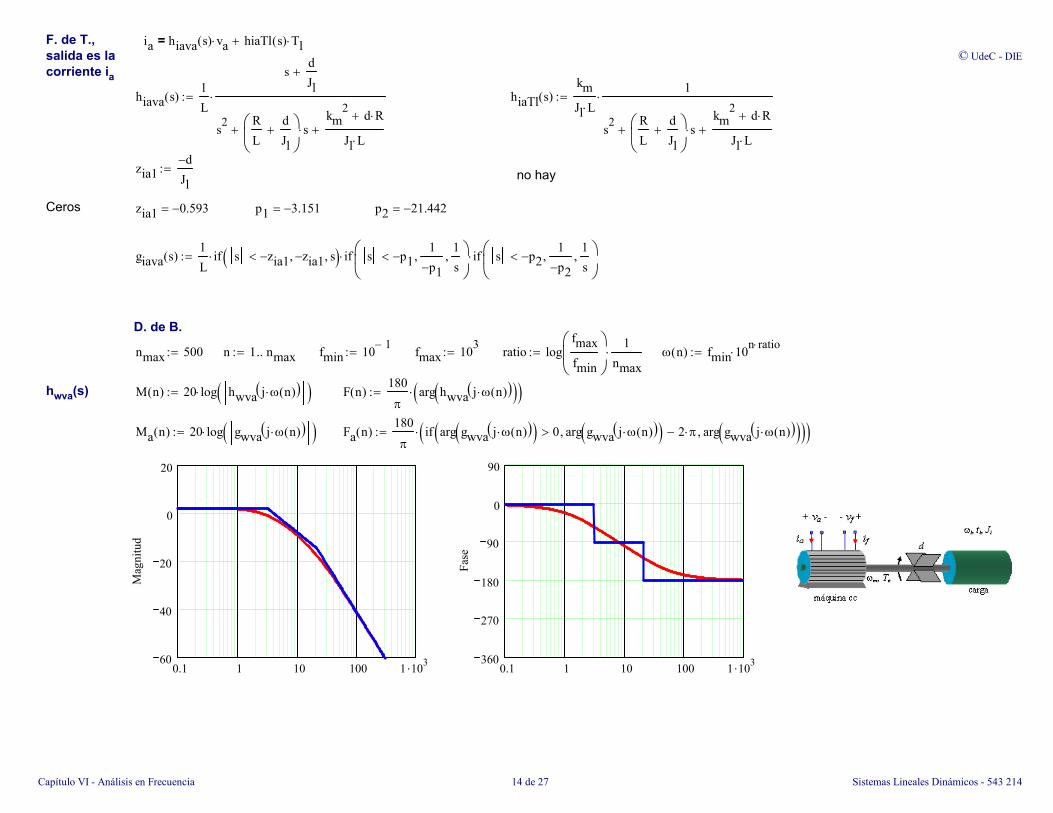
Fa n( )180
πif arg gwva j ω n( )⋅( )( ) 0> arg gwva j ω n( )⋅( )( ) 2 π⋅−, arg gwva j ω n( )⋅( )( ),( )( )⋅:=Ma n( ) 20 log gwva j ω n( )⋅( )( )⋅:=
F n( )180
πarg hwva j ω n( )⋅( )( )( )⋅:=M n( ) 20 log hwva j ω n( )⋅( )( )⋅:=hwva(s)
ω n( ) fmin 10n ratio⋅
⋅:=ratio logfmax
fmin
1
nmax
⋅:=fmax 103
:=fmin 101−
:=n 1 nmax..:=nmax 500:=
D. de B.
giava s( )1
Lif s zia1−< zia1−, s,( )⋅ if s p1−<
1
p1−,
1
s,
⋅ if s p2−<1
p2−,
1
s,
⋅:=
p2 21.442−=p1 3.151−=zia1 0.593−=Ceros
no hayzia1
d−
Jl
:=
hiaTl s( )km
Jl L⋅
1
s2 R
L
d
Jl
+
s⋅+
km2
d R⋅+
Jl L⋅+
⋅:=hiava s( )1
L
sd
Jl
+
s2 R
L
d
Jl
+
s⋅+
km2
d R⋅+
Jl L⋅+
⋅:=
ia hiava s( ) va⋅ hiaTl s( ) Tl⋅+=F. de T.,
salida es la
corriente ia
Capítulo VI - Análisis en Frecuencia 14 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
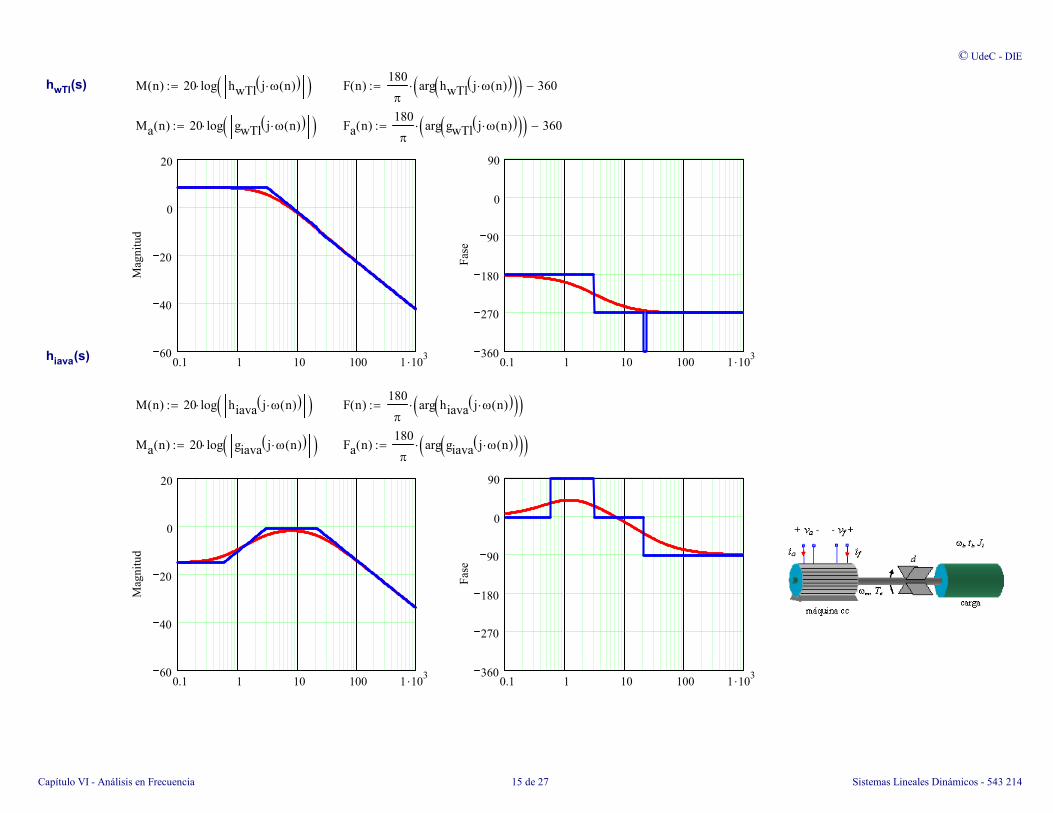
hwTl(s) M n( ) 20 log hwTl j ω n( )⋅( )( )⋅:= F n( )180
πarg hwTl j ω n( )⋅( )( )( )⋅ 360−:=
Ma n( ) 20 log gwTl j ω n( )⋅( )( )⋅:= Fa n( )180
πarg gwTl j ω n( )⋅( )( )( )⋅ 360−:=
0.1 1 10 100 1 .10360
40
20
0
20
Magnitud
0.1 1 10 100 1 .103360
270
180
90
0
90
Fase
hiava(s)
M n( ) 20 log hiava j ω n( )⋅( )( )⋅:= F n( )180
πarg hiava j ω n( )⋅( )( )( )⋅:=
Ma n( ) 20 log giava j ω n( )⋅( )( )⋅:= Fa n( )180
πarg giava j ω n( )⋅( )( )( )⋅:=
0.1 1 10 100 1 .10360
40
20
0
20
Magnitud
0.1 1 10 100 1 .103360
270
180
90
0
90
Fase
Capítulo VI - Análisis en Frecuencia 15 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
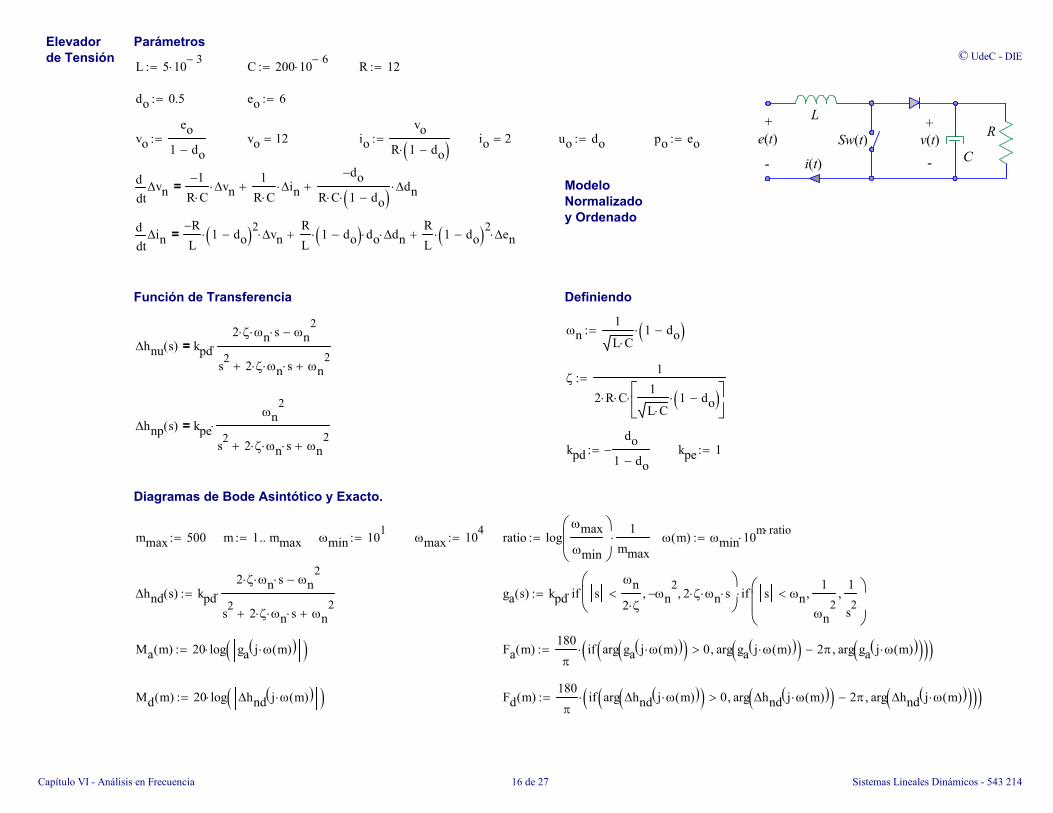
∆hnu s( ) kpd
2 ζ⋅ ωn⋅ s⋅ ωn2
−
s2
2 ζ⋅ ωn⋅ s⋅+ ωn2
+
⋅=
ζ1
2 R⋅ C⋅1
L C⋅1 do−( )⋅
⋅
:=
∆hnp s( ) kpe
ωn2
s2
2 ζ⋅ ωn⋅ s⋅+ ωn2
+
⋅=
kpd
do
1 do−−:= kpe 1:=
Diagramas de Bode Asintótico y Exacto.
mmax 500:= m 1 mmax..:= ωmin 101
:= ωmax 104
:= ratio logωmax
ωmin
1
mmax
⋅:= ω m( ) ωmin 10m ratio⋅
⋅:=
∆hnd s( ) kpd
2 ζ⋅ ωn⋅ s⋅ ωn2
−
s2
2 ζ⋅ ωn⋅ s⋅+ ωn2
+
⋅:= ga s( ) kpd if sωn
2 ζ⋅< ωn
2−, 2 ζ⋅ ωn⋅ s⋅,
⋅ if s ωn<1
ωn2
,1
s2
,
⋅:=
Ma m( ) 20 log ga j ω m( )⋅( )( )⋅:= Fa m( )180
πif arg ga j ω m( )⋅( )( ) 0> arg ga j ω m( )⋅( )( ) 2π−, arg ga j ω m( )⋅( )( ),( )( )⋅:=
Md m( ) 20 log ∆hnd j ω m( )⋅( )( )⋅:= Fd m( )180
πif arg ∆hnd j ω m( )⋅( )( ) 0> arg ∆hnd j ω m( )⋅( )( ) 2π−, arg ∆hnd j ω m( )⋅( )( ),( )( )⋅:=
Elevador
de Tensión
Parámetros
L 5 103−
⋅:= C 200 106−
⋅:= R 12:=
+
-
L
e(t)
i(t) C
+
-
v(t) R
Sw(t)
do 0.5:= eo 6:=
vo
eo
1 do−:= vo 12= io
vo
R 1 do−( )⋅:= io 2= uo do:= po eo:=
t∆vn
d
d
1−
R C⋅∆vn⋅
1
R C⋅∆in⋅+
do−
R C⋅ 1 do−( )⋅∆dn⋅+= Modelo
Normalizado
y Ordenado
t∆in
d
d
R−
L1 do−( )2⋅ ∆vn⋅
R
L1 do−( )⋅ do⋅ ∆dn⋅+
R
L1 do−( )2⋅ ∆en⋅+=
Función de Transferencia Definiendo
ωn1
L C⋅1 do−( )⋅:=
Capítulo VI - Análisis en Frecuencia 16 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
10 100 1 .103 1 .10440
20
0Magnitud
10 100 1 .103 1 .104270
180
90
0
Fase
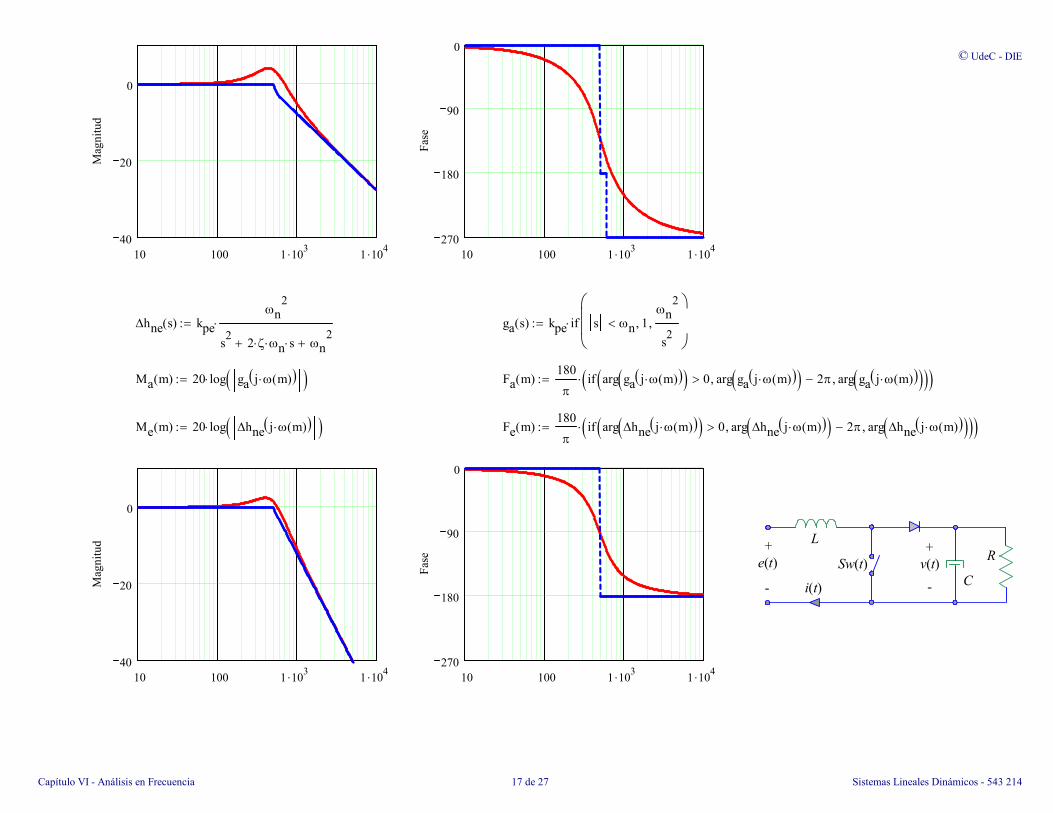
∆hne s( ) kpe
ωn2
s2
2 ζ⋅ ωn⋅ s⋅+ ωn2
+
⋅:= ga s( ) kpe if s ωn< 1,ωn
2
s2
,
⋅:=
Ma m( ) 20 log ga j ω m( )⋅( )( )⋅:= Fa m( )180
πif arg ga j ω m( )⋅( )( ) 0> arg ga j ω m( )⋅( )( ) 2π−, arg ga j ω m( )⋅( )( ),( )( )⋅:=
Me m( ) 20 log ∆hne j ω m( )⋅( )( )⋅:= Fe m( )180
πif arg ∆hne j ω m( )⋅( )( ) 0> arg ∆hne j ω m( )⋅( )( ) 2π−, arg ∆hne j ω m( )⋅( )( ),( )( )⋅:=
10 100 1 .103 1 .10440
20
0
Magnitud
10 100 1 .103 1 .104270
180
90
0
Fase
+
-
L
e(t)
i(t) C
+
-
v(t) R
Sw(t)
Capítulo VI - Análisis en Frecuencia 17 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
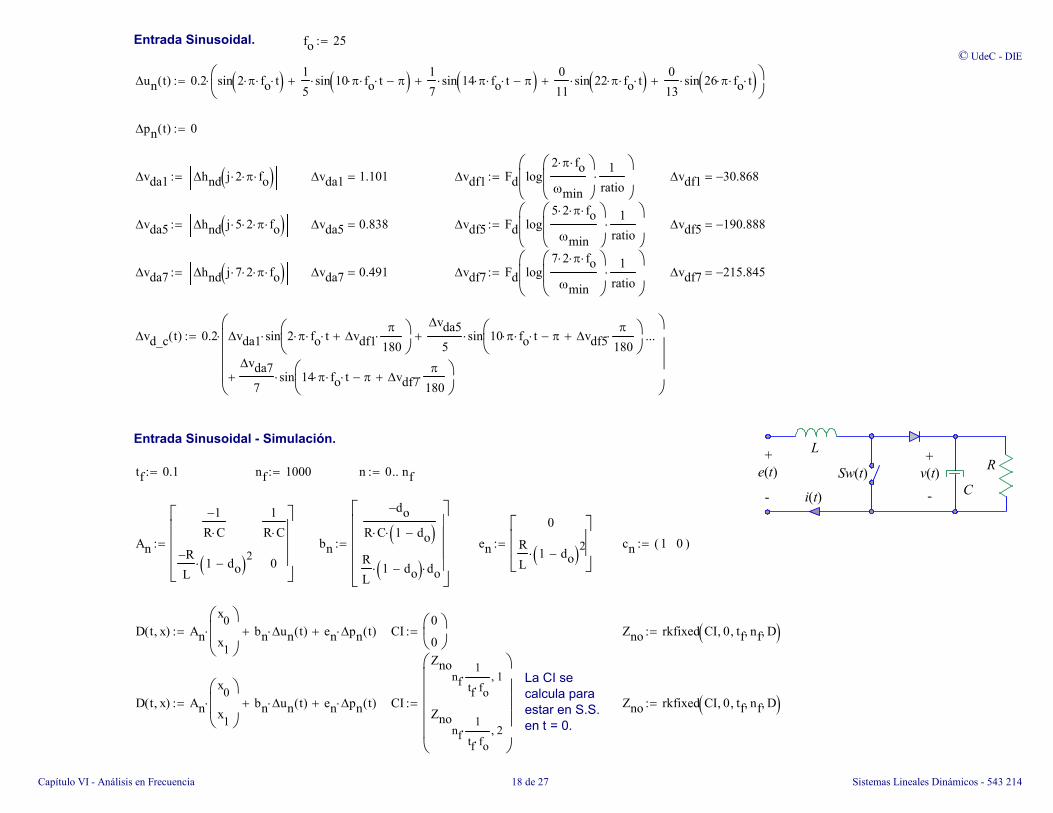
Zno rkfixed CI 0, tf, nf, D,( ):=CI
Znonf
1
tf fo⋅⋅ 1,
Znonf
1
tf fo⋅⋅ 2,
:=D t x,( ) An
x0
x1
⋅ bn ∆un t( )⋅+ en ∆pn t( )⋅+:=
La CI se
calcula para
estar en S.S.
en t = 0.
Zno rkfixed CI 0, tf, nf, D,( ):=CI0
0
:=D t x,( ) An
x0
x1
⋅ bn ∆un t( )⋅+ en ∆pn t( )⋅+:=
cn 1 0( ):=en
0
R
L1 do−( )2⋅
:=bn
do−
R C⋅ 1 do−( )⋅
R
L1 do−( )⋅ do⋅
:=An
1−
R C⋅
R−
L1 do−( )2⋅
1
R C⋅
0
:=
n 0 nf..:=nf 1000:=tf 0.1:=
Entrada Sinusoidal - Simulación.
+
-
L
e(t)
i(t) C
+
-
v(t) R
Sw(t)
Entrada Sinusoidal. fo 25:=
∆un t( ) 0.2 sin 2 π⋅ fo⋅ t⋅( ) 1
5sin 10 π⋅ fo⋅ t⋅ π−( )⋅+
1
7sin 14 π⋅ fo⋅ t⋅ π−( )⋅+
0
11sin 22 π⋅ fo⋅ t⋅( )⋅+
0
13sin 26 π⋅ fo⋅ t⋅( )⋅+
⋅:=
∆pn t( ) 0:=
∆vda1 ∆hnd j 2⋅ π⋅ fo⋅( ):= ∆vda1 1.101= ∆vdf1 Fd log2 π⋅ fo⋅
ωmin
1
ratio⋅
:= ∆vdf1 30.868−=
∆vda5 ∆hnd j 5⋅ 2⋅ π⋅ fo⋅( ):= ∆vda5 0.838= ∆vdf5 Fd log5 2⋅ π⋅ fo⋅
ωmin
1
ratio⋅
:= ∆vdf5 190.888−=
∆vda7 ∆hnd j 7⋅ 2⋅ π⋅ fo⋅( ):= ∆vda7 0.491= ∆vdf7 Fd log7 2⋅ π⋅ fo⋅
ωmin
1
ratio⋅
:= ∆vdf7 215.845−=
∆vd_c t( ) 0.2 ∆vda1 sin 2 π⋅ fo⋅ t⋅ ∆vdf1π
180⋅+
⋅∆vda5
5sin 10 π⋅ fo⋅ t⋅ π− ∆vdf5
π
180⋅+
⋅+
∆vda7
7sin 14 π⋅ fo⋅ t⋅ π− ∆vdf7
π
180⋅+
⋅+
...
⋅:=
Capítulo VI - Análisis en Frecuencia 18 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
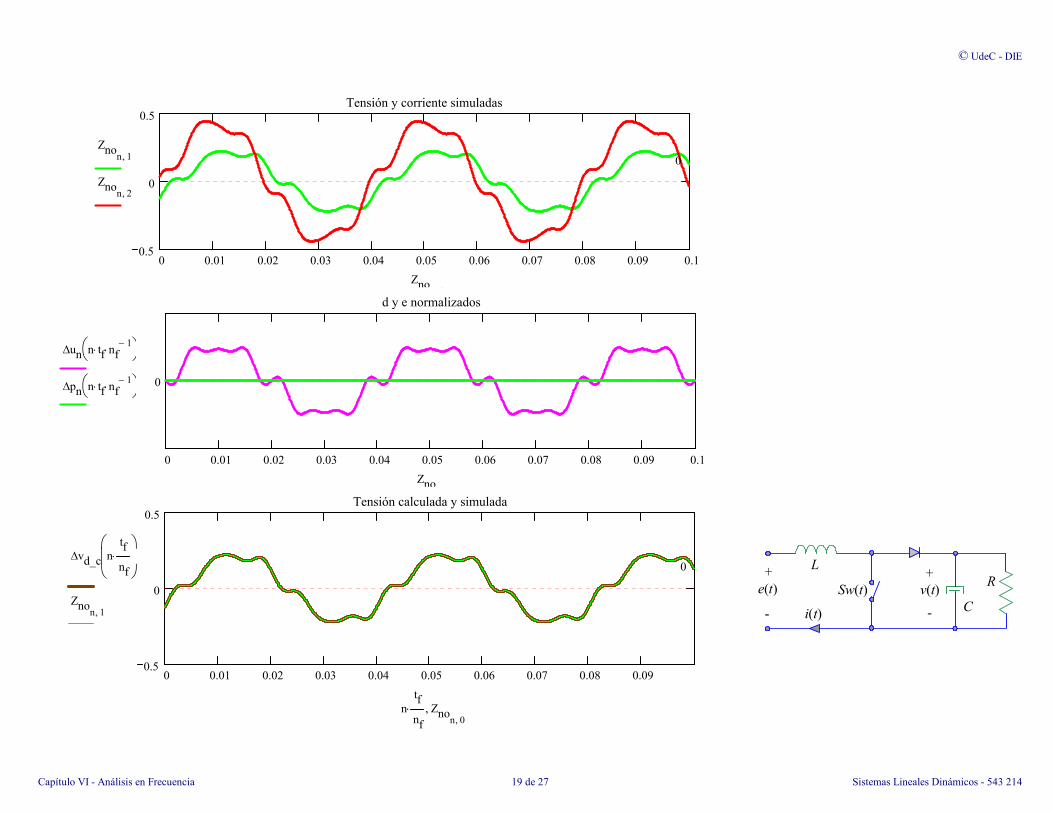
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10.5
0
0.5Tensión y corriente simuladas
0
Znon 1,
Znon 2,
Znon 0,
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
0
d y e normalizados
∆un n tf⋅ nf1−⋅
∆pn n tf⋅ nf1−⋅
Znon 0,
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.090.5
0
0.5Tensión calculada y simulada
0∆vd_c n
tf
nf
⋅
Znon 1,
n
tf
nf
⋅ Znon 0,
,
+
-
L
e(t)
i(t) C
+
-
v(t) R
Sw(t)
Capítulo VI - Análisis en Frecuencia 19 de 27 Sistemas Lineales Dinámicos - 543 214
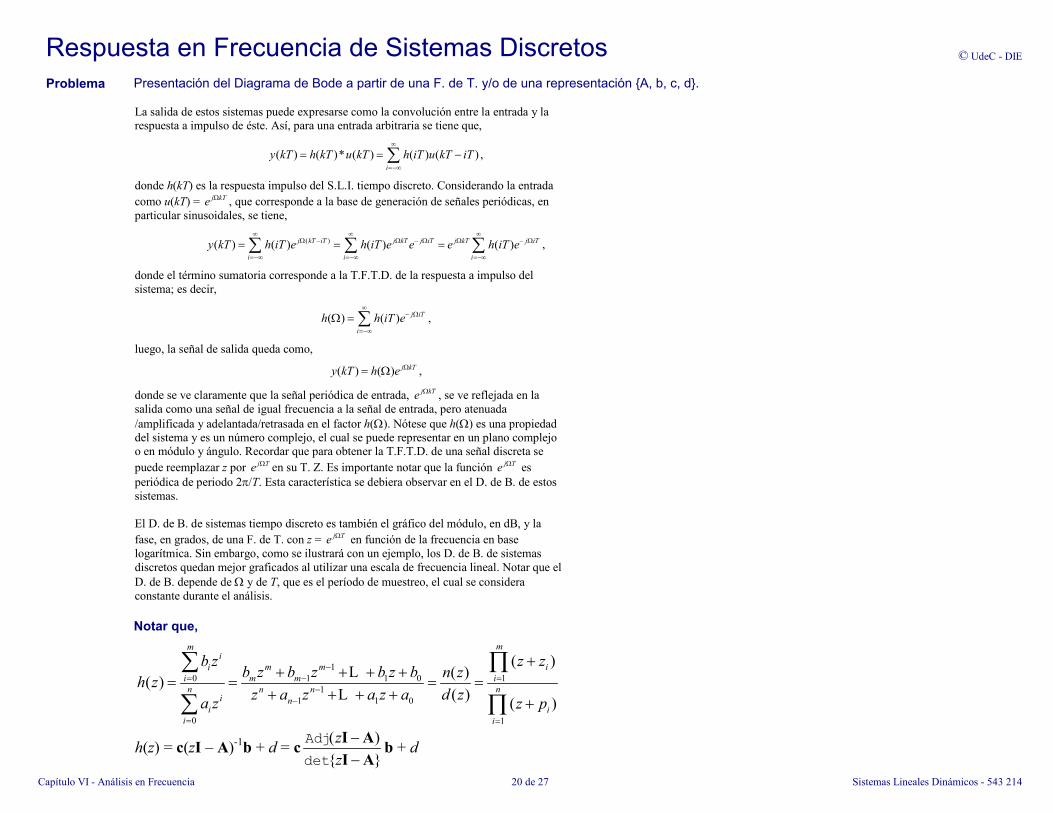
© UdeC - DIERespuesta en Frecuencia de Sistemas Discretos
Problema Presentación del Diagrama de Bode a partir de una F. de T. y/o de una representación A, b, c, d.
La salida de estos sistemas puede expresarse como la convolución entre la entrada y la
respuesta a impulso de éste. Así, para una entrada arbitraria se tiene que,
( ) ( )* ( ) ( ) ( )i
y kT h kT u kT h iT u kT iT∞
=−∞
= = −∑ ,
donde h(kT) es la respuesta impulso del S.L.I. tiempo discreto. Considerando la entrada
como u(kT) = j kTe Ω , que corresponde a la base de generación de señales periódicas, en
particular sinusoidales, se tiene,
( )( ) ( ) ( ) ( )j kT iT j kT j iT j kT j iT
i i i
y kT h iT e h iT e e e h iT e∞ ∞ ∞
Ω − Ω − Ω Ω − Ω
=−∞ =−∞ =−∞
= = =∑ ∑ ∑ ,
donde el término sumatoria corresponde a la T.F.T.D. de la respuesta a impulso del
sistema; es decir,
( ) ( ) j iT
i
h h iT e∞
− Ω
=−∞
Ω = ∑ ,
luego, la señal de salida queda como,
( ) ( ) j kTy kT h e Ω= Ω ,
donde se ve claramente que la señal periódica de entrada, j kTe Ω , se ve reflejada en la
salida como una señal de igual frecuencia a la señal de entrada, pero atenuada
/amplificada y adelantada/retrasada en el factor h(Ω). Nótese que h(Ω) es una propiedad del sistema y es un número complejo, el cual se puede representar en un plano complejo
o en módulo y ángulo. Recordar que para obtener la T.F.T.D. de una señal discreta se
puede reemplazar z por j Te Ω en su T. Z. Es importante notar que la función j Te Ω es
periódica de periodo 2π/T. Esta característica se debiera observar en el D. de B. de estos sistemas.
El D. de B. de sistemas tiempo discreto es también el gráfico del módulo, en dB, y la
fase, en grados, de una F. de T. con z = j Te Ω en función de la frecuencia en base
logarítmica. Sin embargo, como se ilustrará con un ejemplo, los D. de B. de sistemas
discretos quedan mejor graficados al utilizar una escala de frecuencia lineal. Notar que el
D. de B. depende de Ω y de T, que es el período de muestreo, el cual se considera constante durante el análisis.
Notar que,
1
0 1 1 0 1
1
1 1 0
0 1
( )( )
( )( )
( )
mmi
m m ii
i m m i
n nn ni n
i i
i i
z zb zb z b z b z b n z
h zz a z a z a d z
a z z p
−= − =
−−
= =
++ + + +
= = = =+ + + + +
∑ ∏
∑ ∏L
L
h(z) = c(zI – A)-1b + d = c( )
z
z
−−I A
I A
Adj
detb + d
Capítulo VI - Análisis en Frecuencia 20 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
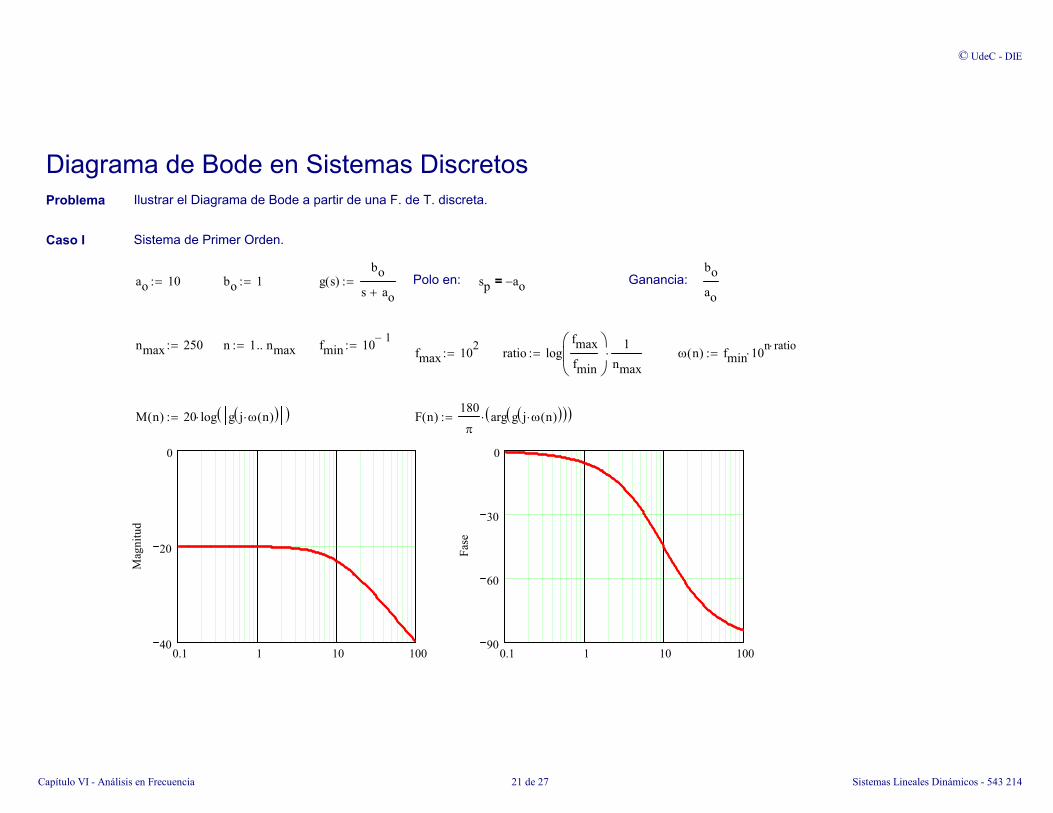
0.1 1 10 10090
60
30
0Fase
0.1 1 10 10040
20
0
Magnitud
F n( )180
πarg g j ω n( )⋅( )( )( )⋅:=M n( ) 20 log g j ω n( )⋅( )( )⋅:=
ω n( ) fmin 10n ratio⋅
⋅:=ratio logfmax
fmin
1
nmax
⋅:=fmax 102
:=fmin 10
1−:=n 1 nmax..:=nmax 250:=
bo
ao
Ganancia:sp ao−=Polo en:g s( )bo
s ao+:=bo 1:=ao 10:=
Sistema de Primer Orden.Caso I
Ilustrar el Diagrama de Bode a partir de una F. de T. discreta.Problema
Diagrama de Bode en Sistemas Discretos
Capítulo VI - Análisis en Frecuencia 21 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
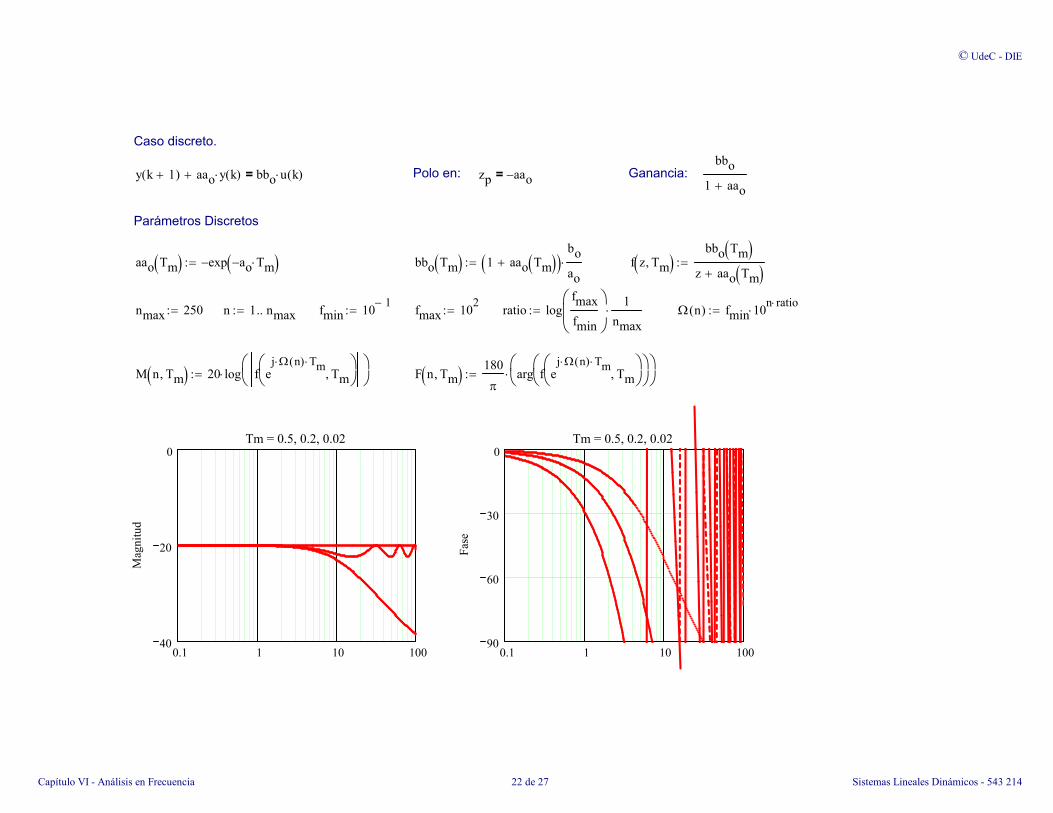
0.1 1 10 10090
60
30
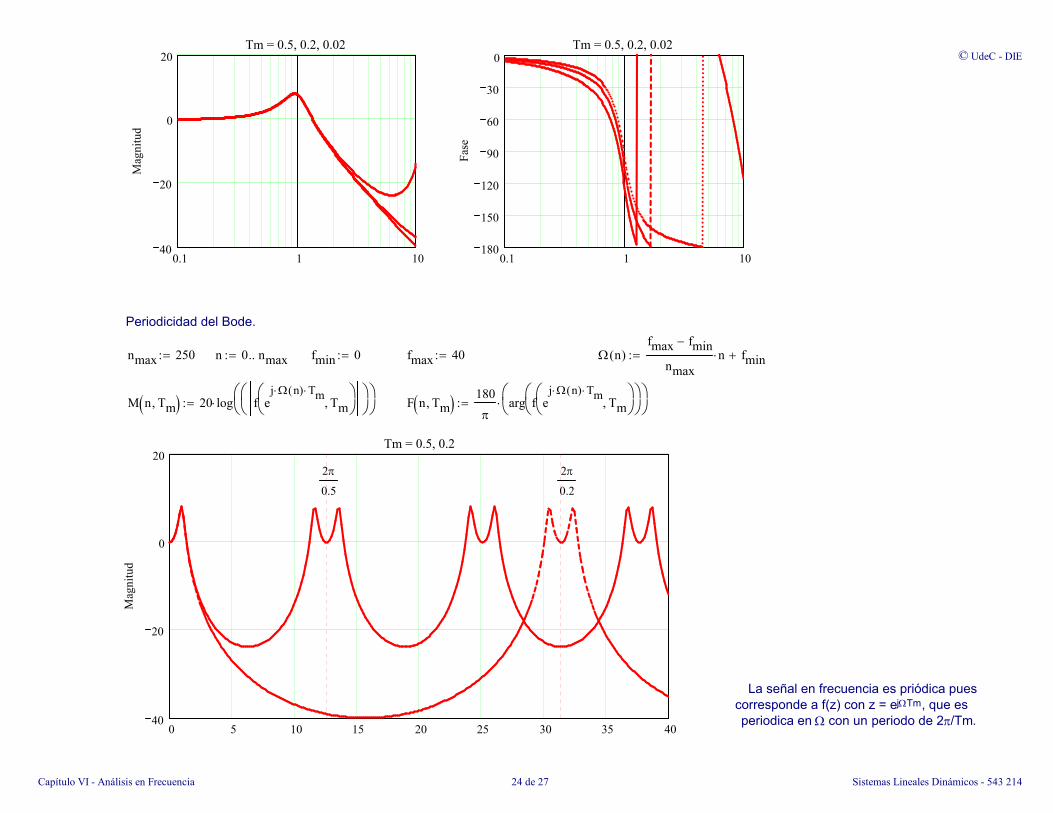
0Tm = 0.5, 0.2, 0.02
Fase
0.1 1 10 10040
20
0Tm = 0.5, 0.2, 0.02
Magnitud
F n Tm,( ) 180
πarg f e
j Ω n( )⋅ Tm⋅Tm,
⋅:=M n Tm,( ) 20 log f e
j Ω n( )⋅ Tm⋅Tm,
⋅:=
Ω n( ) fmin 10n ratio⋅
⋅:=ratio logfmax
fmin
1
nmax
⋅:=fmax 102
:=fmin 101−
:=n 1 nmax..:=nmax 250:=
f z Tm,( )bbo Tm( )
z aao Tm( )+:=bbo Tm( ) 1 aao Tm( )+( )
bo
ao
⋅:=aao Tm( ) exp ao− Tm⋅( )−:=
Parámetros Discretos
bbo
1 aao+Ganancia:zp aao−=Polo en:y k 1+( ) aao y k( )⋅+ bbo u k( )⋅=
Caso discreto.
Capítulo VI - Análisis en Frecuencia 22 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
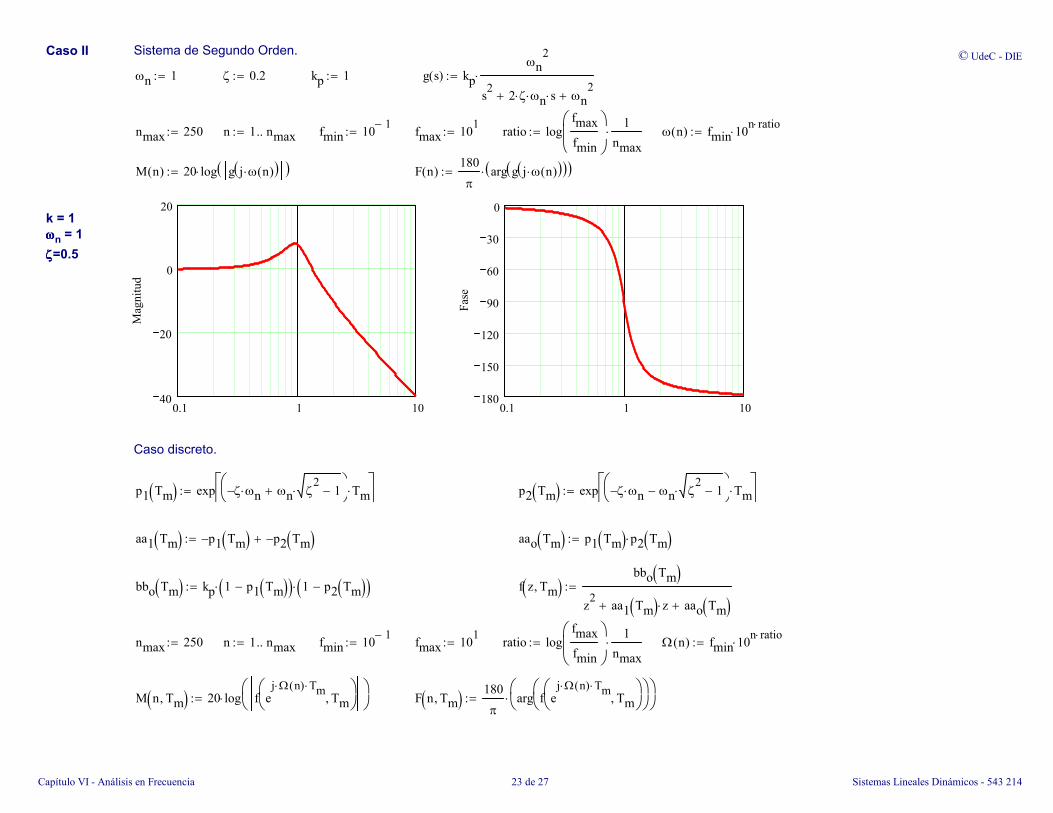
Caso discreto.
p1 Tm( ) exp ζ− ωn⋅ ωn ζ2
1−⋅+
Tm⋅
:= p2 Tm( ) exp ζ− ωn⋅ ωn ζ
21−⋅−
Tm⋅
:=
aa1 Tm( ) p1 Tm( )− p2 Tm( )−+:= aao Tm( ) p1 Tm( ) p2 Tm( )⋅:=
bbo Tm( ) kp 1 p1 Tm( )−( )⋅ 1 p2 Tm( )−( )⋅:= f z Tm,( )bbo Tm( )
z2
aa1 Tm( ) z⋅+ aao Tm( )+:=
nmax 250:= n 1 nmax..:= fmin 101−
:= fmax 101
:= ratio logfmax
fmin
1
nmax
⋅:= Ω n( ) fmin 10n ratio⋅
⋅:=
M n Tm,( ) 20 log f ej Ω n( )⋅ Tm⋅
Tm,
⋅:= F n Tm,( ) 180
πarg f e
j Ω n( )⋅ Tm⋅Tm,
⋅:=
Caso II Sistema de Segundo Orden.
ωn 1:= ζ 0.2:= kp 1:= g s( ) kp
ωn2
s2
2 ζ⋅ ωn⋅ s⋅+ ωn2
+
⋅:=
nmax 250:= n 1 nmax..:= fmin 101−
:= fmax 101
:= ratio logfmax
fmin
1
nmax
⋅:= ω n( ) fmin 10n ratio⋅
⋅:=
M n( ) 20 log g j ω n( )⋅( )( )⋅:= F n( )180
πarg g j ω n( )⋅( )( )( )⋅:=
0.1 1 1040
20
0
20
Magnitud
0.1 1 10180
150
120
90
60
30
0
Fase
k = 1
ωωωωn = 1
ζζζζ=0.5
Capítulo VI - Análisis en Frecuencia 23 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
0.1 1 1040
20
0
20Tm = 0.5, 0.2, 0.02
Magnitud
0.1 1 10180
150
120
90
60
30
0Tm = 0.5, 0.2, 0.02
Fase
Periodicidad del Bode.
nmax 250:= n 0 nmax..:= fmin 0:= fmax 40:= Ω n( )fmax fmin−
nmax
n⋅ fmin+:=
M n Tm,( ) 20 log f ej Ω n( )⋅ Tm⋅
Tm,
⋅:= F n Tm,( ) 180
πarg f e
j Ω n( )⋅ Tm⋅Tm,
⋅:=
0 5 10 15 20 25 30 35 4040
20
0
20Tm = 0.5, 0.2
Magnitud
2π
0.5
2π
0.2
La señal en frecuencia es priódica pues
corresponde a f(z) con z = ejΩTm, que es
periodica en Ω con un periodo de 2π/Tm.
Capítulo VI - Análisis en Frecuencia 24 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
ω hwva s( ) va⋅ hwTl s( ) Tl⋅+=
hwva s( ) 0 1( ) s identity 2( )⋅ Ac−( ) 1−⋅ bc⋅:= hwTl s( ) 0 1( ) s identity 2( )⋅ Ac−( ) 1−
⋅ ec⋅:=
F. de T.,
salida es la
corriente ia
ia hiava s( ) va⋅ hiaTl s( ) Tl⋅+=
hiava s( ) 1 0( ) s identity 2( )⋅ Ac−( ) 1−⋅ bc⋅:= hiaTl s( ) 1 0( ) s identity 2( )⋅ Ac−( ) 1−
⋅ ec⋅:=
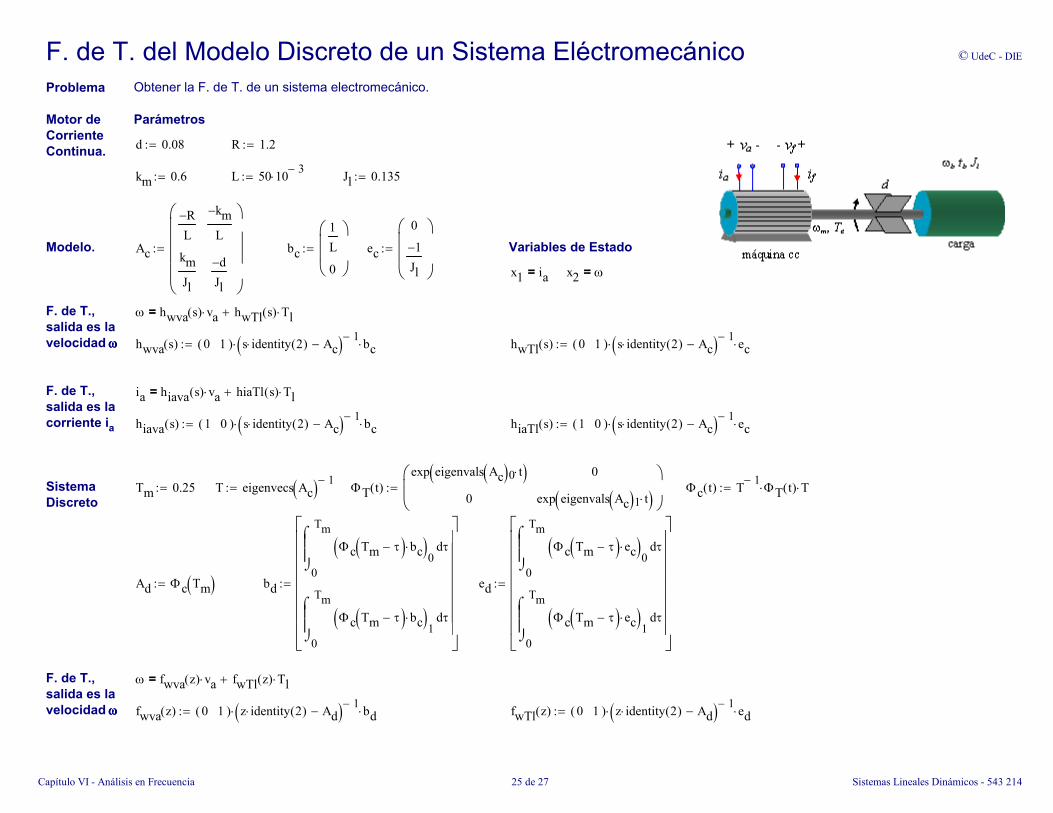
Sistema
DiscretoTm 0.25:= T eigenvecs Ac( ) 1−
:= ΦT t( )
exp eigenvals Ac( )0 t⋅( )0
0
exp eigenvals Ac( )1 t⋅( )
:= Φc t( ) T1−ΦT t( )⋅ T⋅:=
Ad Φc Tm( ):= bd
0
Tm
τΦc Tm τ−( ) bc⋅( )0
⌠⌡
d
0
Tm
τΦc Tm τ−( ) bc⋅( )1
⌠⌡
d
:= ed
0
Tm
τΦc Tm τ−( ) ec⋅( )0
⌠⌡
d
0
Tm
τΦc Tm τ−( ) ec⋅( )1
⌠⌡
d
:=
F. de T.,
salida es la
velocidad ωωωω
ω fwva z( ) va⋅ fwTl z( ) Tl⋅+=
fwva z( ) 0 1( ) z identity 2( )⋅ Ad−( ) 1−⋅ bd⋅:= fwTl z( ) 0 1( ) z identity 2( )⋅ Ad−( ) 1−
⋅ ed⋅:=
F. de T. del Modelo Discreto de un Sistema Eléctromecánico
Problema Obtener la F. de T. de un sistema electromecánico.
Motor de
Corriente
Continua.
Parámetros
d 0.08:= R 1.2:=
km 0.6:= L 50 103−
⋅:= Jl 0.135:=
Modelo. Ac
R−
L
km
Jl
km−
L
d−
Jl
:= bc
1
L
0
:= ec
0
1−
Jl
:= Variables de Estado
x1 ia= x2 ω=
F. de T.,
salida es la
velocidad ωωωω
Capítulo VI - Análisis en Frecuencia 25 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
0.1 1 10 100360
270
180
90
0
90Fase
0.1 1 10 10060
40
20
0
20
Magnitud
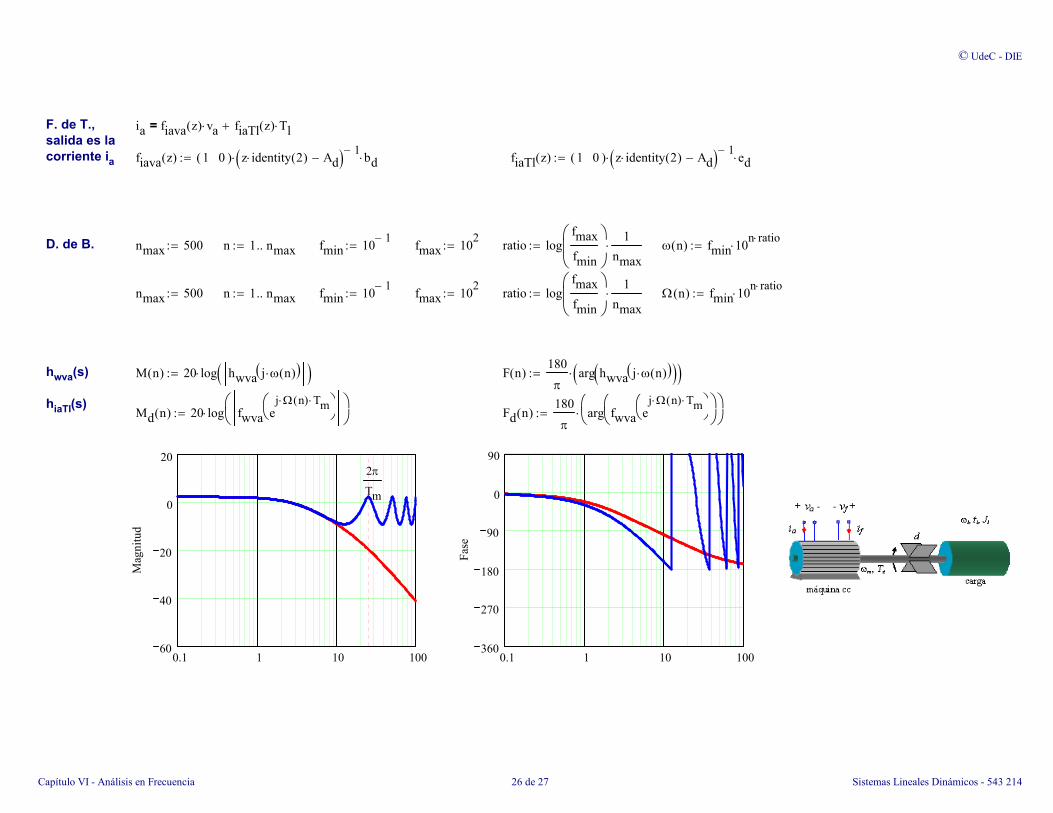
2π
Tm
Fd n( )180
πarg fwva e
j Ω n( )⋅ Tm⋅
⋅:=Md n( ) 20 log fwva e
j Ω n( )⋅ Tm⋅
⋅:=
hiaTl(s)
F n( )180
πarg hwva j ω n( )⋅( )( )( )⋅:=M n( ) 20 log hwva j ω n( )⋅( )( )⋅:=hwva(s)
Ω n( ) fmin 10n ratio⋅
⋅:=ratio logfmax
fmin
1
nmax
⋅:=fmax 102
:=fmin 101−
:=n 1 nmax..:=nmax 500:=
ω n( ) fmin 10n ratio⋅
⋅:=ratio logfmax
fmin
1
nmax
⋅:=fmax 102
:=fmin 101−
:=n 1 nmax..:=nmax 500:=D. de B.
fiaTl z( ) 1 0( ) z identity 2( )⋅ Ad−( ) 1−⋅ ed⋅:=fiava z( ) 1 0( ) z identity 2( )⋅ Ad−( ) 1−
⋅ bd⋅:=
ia fiava z( ) va⋅ fiaTl z( ) Tl⋅+=F. de T.,
salida es la
corriente ia
Capítulo VI - Análisis en Frecuencia 26 de 27 Sistemas Lineales Dinámicos - 543 214
© UdeC - DIE
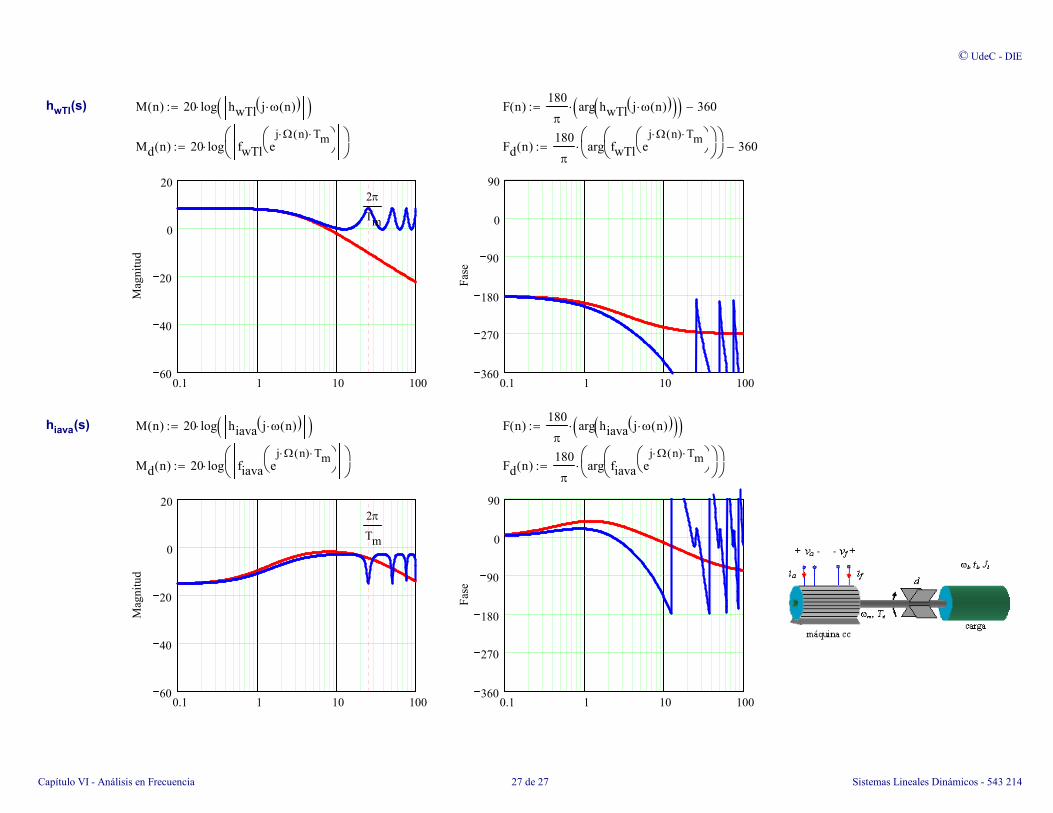
hwTl(s) M n( ) 20 log hwTl j ω n( )⋅( )( )⋅:= F n( )180
πarg hwTl j ω n( )⋅( )( )( )⋅ 360−:=
Md n( ) 20 log fwTl ej Ω n( )⋅ Tm⋅
⋅:= Fd n( )
180
πarg fwTl e
j Ω n( )⋅ Tm⋅
⋅ 360−:=
0.1 1 10 10060
40
20
0
20
Magnitud
2π
Tm
0.1 1 10 100360
270
180
90
0
90
Fase
hiava(s) M n( ) 20 log hiava j ω n( )⋅( )( )⋅:= F n( )180
πarg hiava j ω n( )⋅( )( )( )⋅:=
Md n( ) 20 log fiava ej Ω n( )⋅ Tm⋅
⋅:= Fd n( )
180
πarg fiava e
j Ω n( )⋅ Tm⋅
⋅:=
0.1 1 10 10060
40
20
0
20
Magnitud
2π
Tm
0.1 1 10 100360
270
180
90
0
90
Fase
Capítulo VI - Análisis en Frecuencia 27 de 27 Sistemas Lineales Dinámicos - 543 214












![LABORATÓRIO DE SISTEMAS MECATRÔNICOS E ROBÓTICA ] - LAB.pdf · Resistores - 1,0 Ω - 100k Ω 1,2 Ω - 120k Ω 1,5 Ω - 150k Ω 1,8 Ω- 180k Ω 2,2 Ω– 220k Ω 2,7 Ω– 270k](https://static.fdocument.org/doc/165x107/5c245c1a09d3f224508c4b48/laboratorio-de-sistemas-mecatronicos-e-robotica-labpdf-resistores-.jpg)