Plates and shells - MIT OpenCourseWare · PDF file2.094 — Finite Element Analysis of...
5
� � � �� � 2.094 — Finite Element Analysis of Solids and Fluids Fall ‘08 Lecture 21 - Plates and shells Prof. K.J. Bathe MIT OpenCourseWare Timoshenko beam theory, and Reissner-Mindlin plate theory For plates, and shells, w, β x , and β y as independent variables. w = displacement of mid-surface, w(x, y) A = area of mid-surface p = load per unit area on mid-surface w = w(x, y) (21.1) w(x, y, z) = w(x, y) The material particles at “any z” move in the z-direction as the mid-surface. (21.2) u(x, y, z) = −β x z = −β x (x, y)z v(x, y, z) = −β y z = −β y (x, y)z (21.3) (21.4) � xx = ∂u ∂x = −z ∂β x ∂x � yy = ∂v ∂y = −z ∂β y ∂y (21.5) (21.6) γ xy = ∂u + ∂v = −z ∂β x + ∂β y (21.7) ∂y ∂x ∂y ∂x ⎞ ⎛ ∂βx ∂x ⎞ ⎛ � xx ⎝ ⎠ = −z ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ (21.8) ∂βy � yy ∂y γ xy ∂βx + ∂βy ∂y ∂x κ 90
Transcript of Plates and shells - MIT OpenCourseWare · PDF file2.094 — Finite Element Analysis of...

� �
� �� �
2.094 — Finite Element Analysis of Solids and Fluids Fall ‘08
Lecture 21 - Plates and shells
Prof. K.J. Bathe MIT OpenCourseWare
Timoshenko beam theory, and Reissner-Mindlin plate theory
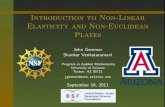
For plates, and shells, w, βx, and βy as independent variables.
w = displacement of mid-surface, w(x, y)
A = area of mid-surface
p = load per unit area on mid-surface
w = w(x, y) (21.1)
w(x, y, z) = w(x, y)
The material particles at “any z” move in the z-direction as the mid-surface.
(21.2)
u(x, y, z) = −βxz = −βx(x, y)z
v(x, y, z) = −βyz = −βy(x, y)z
(21.3) (21.4)
�xx = ∂u ∂x
= −z ∂βx
∂x
�yy = ∂v ∂y
= −z ∂βy
∂y
(21.5)
(21.6)
γxy = ∂u
+ ∂v
= −z ∂βx +
∂βy (21.7) ∂y ∂x ∂y ∂x
⎞⎛ ∂βx ∂x ⎞⎛
�xx ⎝ ⎠ = −z
⎜⎜⎜⎜⎜⎝
⎟⎟⎟⎟⎟⎠ (21.8) ∂βy�yy ∂y
γxy ∂βx + ∂βy
∂y ∂x
κ
90

� � � �
� �
� � �
MIT 2.094 21. Plates and shells
∂w ∂u ∂w γxz =
∂x +
∂z =
∂x − βx (21.9)
∂w ∂v ∂w γyz =
∂y +
∂z =
∂y − βy (21.10)
⎛ ⎞ ⎡ ⎤⎛ ⎞ τxx E 1 ν 0 �xx ⎝ τyy ⎠ = ⎣ ν 1 0 ⎦⎝ �yy ⎠ = C � (21.11) τxy
1 − ν2 0 0 1−
2 ν γxy
·
(plane stress)
τxz = E γxz = Gγ (21.12)
τyz 2(1 + ν) γyz
Principle of virtual work for the plate:
⎡ ⎤⎛ ⎞ 1 ν 0 �xx
ν 1 0 ⎦⎝ �yy ⎠dzdA+ t 2+ � � E
�xx γ ⎣�yy xy 1 − ν2 A − t
2 0 0 1−ν 2 γxy (21.13) � �� �t
2+ � � 1 0 γxzγ γ Gk dzdA = wpdA0 1xz yz γyz − t 2A A
Consider a flat element:
⎛ ⎞ w1 ⎛ ⎞⎜ θ1 ⎟ u1⎜ x ⎟ ⎜ v1 ⎟Kb ⎜ θ1 ⎟ , also Kpl. str. ⎝ ⎠ (21.14) ⇒ ⎝ y ⎠ . . .. . .
where Kb is 12x12 and Kpl. str. is 8x8.
91

� �
�
�
�
�
�
� � � �
� �����
MIT 2.094 21. Plates and shells
For a flat element: ⎞⎛ ⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
w1
θ1 x
θ1 y . . .
θ4 y
u1
v1 . . . v4
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
= (21.15) · · · Kb 0 ⇒ 0 Kpl. str.
u = hiui (21.16)
v = hivi (21.17)
w = hiwi (21.18)
βx = − hiθyi (21.19)
βy = hiθxi (21.20)
From (21.13) ⎤⎡ 1 ν 0
Et3 1 0 · k 0 1 γdAκT ⎣ ν 1 0 ⎦ κdA + γT Gt (21.21)
12 (1 − ν2) 0 0 1−ν 2
AA
where k is the shear correction factor.
Next, evaluate ∂w , ∂w , ∂βx , . . . etc. This element, as it is, locks! ∂x ∂y ∂x ⇒
This displacement-based element “locks in shear”. We need to change the transverse shear interpolations.
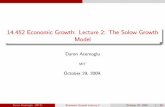
1 1 γyz = (1 − r)γA + (1 + r)γC (21.22)
2 yz 2 yz
where
∂w γA (21.23) =
∂y − βyyz
from the w, βy displacement interpolations.
1 1 = (1 − s)γB + (1 + s)γD (21.24) γxz 2 xz 2 xz
with this mixed interpolation, the element works. Called MITC interpolation (for mixed interpolated-tensional components)
92
evaluated at A

� �
�
MIT 2.094 21. Plates and shells
Aside: Why not just neglect transverse shears, as in Kirchhoff plate theory?
∂w ∂w • If we do, γxz = ∂x − βx = 0 ⇒ βx = ∂x
Therefore we have ∂2 w in strains, so we need continuity also for • � � ∂x2 , · · · ∂w∂x · · ·
•
w = 21 r(1 + r)w1 −
21 r(1 − r)w2 +
� 1 − r 2
� w3
w2 and w3 never affect w1 (∴ w|r=1 = w1).
But,
∂w 1 1 ∂r
= 2(1 + 2r)w1 −
2(1 − 2r)w2 − 2rw3
∂w �w2 and w3 affect ∂r . This results in difficulties to develop a good 1⇒
element based on Kirchhoff theory.
With Reissner-Mindlin theory, we independently interpolate rotations such that this problem does not arise.
For flat structures, we can superimpose the plate bending and plane stress element stiffness. For shells, curved structures, we need to develop/use curved elements, see references.
References
[1] E. Dvorkin and K.J. Bathe. “A Continuum Mechanics Based Four-Node Shell Element for General Nonlinear Analysis.” Engineering Computations, 1:77–88, 1984.
[2] K.J. Bathe and E. Dvorkin. “A Four-Node Plate Bending Element Based on Mindlin/Reissner Plate Theory and a Mixed Interpolation.” International Journal for Numerical Methods in Engineering, 21:367–383, 1985.
[3] K.J. Bathe, A. Iosilevich and D. Chapelle. “An Evaluation of the MITC Shell Elements.” Computers & Structures, 75:1–30, 2000.
[4] D. Chapelle and K.J. Bathe. The Finite Element Analysis of Shells – Fundamentals. Springer, 2003.
93

MIT OpenCourseWare http://ocw.mit.edu
2.094 Finite Element Analysis of Solids and Fluids IISpring 2011
For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.