Polymer-virus core-shell structures prepared via co-assembly and template synthesis methods
Upload
duongkhuongCategory
view
265download
8
PLATE AND SHELL THEORY
Søren R. K. Nielsen, Jesper W. Stærdahl and Lars Andersen
θ1
θ2
x1
x2
x3
a
a
a) b)
f
1
1
ω
Aalborg UniversityDepartment of Civil Engineering
November 2007


Contents
1 Preliminaries 71.1 Tensor Calculus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7
1.1.1 Vectors, curvilinear coordinates, covariant and contravariant bases . . . 71.1.2 Tensors, dyads and polyads . . . . . . . . . . . . . . . . . . . . . . .. 121.1.3 Gradient, covariant and contravariant derivatives .. . . . . . . . . . . 191.1.4 Riemann-Christoffel tensor . . . . . . . . . . . . . . . . . . . . .. . . 23
1.2 Differential Theory of Surfaces . . . . . . . . . . . . . . . . . . . .. . . . . . 281.2.1 Differential geometry of surfaces, first fundamentalform . . . . . . . . 281.2.2 Principal curvatures, second fundamental form . . . . .. . . . . . . . 351.2.3 Codazzi’s equations . . . . . . . . . . . . . . . . . . . . . . . . . . . 441.2.4 Surface area elements . . . . . . . . . . . . . . . . . . . . . . . . . . 47
1.3 Continuum Mechanics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .491.3.1 Three-dimensional continuum mechanics . . . . . . . . . . .. . . . . 491.3.2 Fiber-reinforced composite materials . . . . . . . . . . . .. . . . . . 59
1.4 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
2 Shell and Plate Theories 692.1 Plates and Shells . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .712.2 Exercises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
7 Index 74
8 Bibliography 76
— 3 —

4 Contents

Preface
This book has been written as a part of ......
Aalborg, November 2007Søren R.K. Nielsen, Jesper W. Stærdahl and Lars Andersen
— 5 —

6 Contents

CHAPTER 1Preliminaries
Mathematical and mechanical preliminaries.
Sections 1.1 and 1.2: basic results of tensor calculus and differential theory of surfaces havebeen outlined in below. Partly based on (Spain, 1965), (Malvern, 1969)
Section 1.3: Three-dimensional continuum mechanics. Composite materials. Based on (Reddy,2004).
1.1 Tensor Calculus
1.1.1 Vectors, curvilinear coordinates, covariant and con travari-ant bases
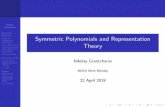
Fig. 1–1 Spherical coordinate system.
Fig. 1-1 shows a Cartesian(x1, x2, x3)-coordinate system, as well as aspherical(θ1, θ2, θ3)-coordinate system.θ1 is thezenith angle, θ2 is theazimuth angle, andθ3 is theradial distance.
— 7 —

8 Chapter 1 – Preliminaries
Notice that upper indices are use for the identification of the coordinates, which should not beconfused with power raising. Instead, this will be indicated by parentheses, so ifx1 specifiesthe first Cartesian coordinate,(x1)2 indicates the corresponding coordinate raised to the secondpower. With the restrictionsθ1 ∈ [0, π], θ2 ∈]0, 2π] andθ3 ≥ 0 a one-to-one correspondencebetween the coordinates of the two systems exists except forpoints at the linex1 = x2 = 0.These represent thesingular pointsof the mapping. Forregular pointsthe relations become,see e.g. (Zill and Cullen, 2005)
x1
x2
x3
=
θ3 sin θ1 cos θ2
θ3 sin θ1 sin θ2
θ3 cos θ1
⇔
θ1
θ2
θ3
=
cos−1 x3
√
(x1)2 + (x2)2 + (x3)2
tan−1 x2
x1
√
(x1)2 + (x2)2 + (x3)2
(1–1)
We shall refer toθl, l = 1, 2, 3, ascurvilinear coordinates. Generally, the relation between theCartesian and curvilinear coordinates are given by relations of the type
xj = f j(θl) (1–2)
TheJacobianof the mapping (1-2) is defined as
J = det
[
∂f j
∂θk
]
(1–3)
Points, whereJ = 0, represent singular points of the mapping. In any regular point, whereJ 6= 0 the inverse mapping exists locally, given as
θj = hj(xl) (1–4)
For θ1 =constant (1-3) defines a surface in space, defined by the parametric description
xj = f j(c1, θ2, θ3) (1–5)
Similar parametric description of surfaces arise, whenθ2 or θ3 are kept constant, and the remain-ing two coordinates are varied independently. The indicated three surfaces intersect pairwisealong three curvessj , j = 1, 2, 3, at which two of the curvilinear coordinates are constant, e.g.the intersection curves1 is determined from the parametric descriptionxj = f j(θ1, c2, c3). Allthree surfaces intersect at the pointP with the Cartesian coordinatesxj = f j(c1, c2, c3). Lo-cally, at this point an additional curvilinear(s1, s2, s3)-coordinate system may be defined withaxes made up of the said intersection curves as shown on Fig. 1-1. We shall refer to thesecoordinates as thearc length coordinates.

1.1 Tensor Calculus 9
The position vectorx from the origin of the Cartesian coordinate system to the point P has thevector representation
x = x1i1 + x2i2 + x3i3 = xjij (1–6)
whereij, j = 1, 2, 3, signify the orthonormalbase vectorsof the Cartesian coordinate sys-tem. In the last statement thesummation conventionover dummy indices has been used. Thisconvention will extensively be used in what follows. The rules is that dummy latin indices in-volves summation over the rangej = 1, 2, 3, whereas dummy greek indices merely involvessummation over the rangeα = 1, 2. As an exampleajbj = a1b1 + a2b2 + a3b3, whereasaαbα = a1b1 + a2b2. The summation convention is abolished, if the dummy indices are sur-rounded by parentheses, i.e.a(j)b(j) merely means the product of thejth componentsaj andbj .
Let dxj denote an infinitesimal increment of thejth coordinate, whereas the other coordinatesare kept constant. From (1-6) follows that this induces a change of the position vector given asdx = i(j)dx(j). Hence,
ij =∂x
∂xj(1–7)
A corresponding independent infinitisimal incrementdθj of the jth curvilinear coordinate in-duce a change of the position vector given asdx = g(j)dθ(j), so
gj =∂x
∂θj(1–8)
gj is tangential to the curvesj at the pointP , see Fig. 1-1. In any regular point the vectorsgj ,j = 1, 2, 3, may be used as base vector for the arc length coordinate system atP . The indicatedvector base vectors is referred to as thecovariant vector base, andgj are denoted thecovariantbase vectors. Especially, if the motion is described in arc length coordinates,gj becomes equalto theunit tangent vectorstj , i.e.
tj =∂x
∂sj(1–9)
Use of the chain rule of partial differentiation provides
gj =∂x
∂θj=
∂x
∂xk
∂xk
∂θj= ck
j ik (1–10)
ij =∂x
∂xj=
∂x
∂θk
∂θk
∂xj= dk
jgk (1–11)
where

10 Chapter 1 – Preliminaries
ckj =
∂xk
∂θj=
∂fk
∂θj
dkj =
∂θk
∂xj=
∂hk
∂xj
(1–12)
ckj specify the Cartesian components of the covariant base vector gj . Similarly, dk
j specifiesthe components in the covariant base of the Cartesian base vector ij . Obviously, the followingrelation prevails
ckl d
lj =
∂xk
∂θl
∂θl
∂xj= δk
j (1–13)
δkj denotesKronecker’s deltain the applied notation, defined as
δkj =
0 , j 6= k
1 , j = k(1–14)
Fig. 1–2 Covariant and contravariant base vectors.
Generally, the covariant base vectorsgj are neither orthogonal nor normalized to the length1, as is the case for the Cartesian base vectorsij. In order to perform similar operations oncomponents of vectors and tensorz as for an orthonormal vector base, a so-calledcontravariantvector baseor dual vector baseis introduced. The correspondingcontravariant base vectorsgj
are defined from
gj · gk = δkj (1–15)
where ”·” indicates a scalar product. (1-15) implies thatg3 is orthogonal tog1 andg2. Further,the angle betweeng3 andg3 is acute in order thatg3 · g3 = +1, see Fig. 1-2. Generally, thecontravariant base vectors can be determined from the covariant base vectors by means of thevector products

1.1 Tensor Calculus 11
g1 =1
Vg2 × g3
g2 =1
Vg3 × g1
g3 =1
Vg1 × g2
⇒ gi =1
Veijk gj × gk (1–16)
whereV denotes the volume of the parallelepiped spanned by the covariant base vectorsgj, seeFig. 1-2. This is given as
V = g1 · (g2 × g3) = g2 · (g3 × g1) = g3 · (g1 × g2) (1–17)
eijk is thepermutation symboldefined as
eijk =
1 , (i, j, k) = (1, 2, 3), (2, 3, 1), (3, 1, 2)
−1 , (i, j, k) = (1, 3, 2), (3, 2, 1), (2, 1, 3)
0 , else
(1–18)
The permutation symbol does not indicate the components of a3rd order tensor in any co-ordinate system, and should merely be considered as an indexed sequence of numbers. Forthis reason we shall not make distinction between upper and lover indices, so we may writeeijk = eijk. The permutation symbol and the Kronecker delta are relatedby the followingso-callede − δ relation
eijkeklm = δilδ
jm − δi
mδjl (1–19)
In the Cartesian coordinate system we haveij = ij, i.e. the dual vector basis is identical tooriginal.
A vector is envisioned as a geometric quantity in space (an ”arrow” with a given length andorientation). From this interpretation it follows that a vector is independent of any coordinatesystem used for its specification. Actually, infinitely manycoordinate systems can be used forthe representation (or decomposition) of one and the same vector. In the Cartesian, the covariantand the contravariant bases a given vectorv can be represented in the following ways
v = vjij = vjgj = vjgj (1–20)
wherevj , vj andvj denotes theCartesian vector components, thecovariant vector components,and thecontravariant vector componentsof the vectorv. Generally, Cartesian components ofvectors and tensors will be indicated by a bar. Use of (1-15),and scalar multiplication of the twolast relations in (1-20) withgk andgk, respectively, provides the following relations betweenthe covariant and contravariant vector components

12 Chapter 1 – Preliminaries
vj = gjkvk
vj = gjkvk
(1–21)
where
gjk = gj · gk = gkj
gjk = gj · gk = gkj
(1–22)
The indicated symmetry property of the quantitiesgjk andgjk follows from the commutativityof the involved scalar products. From (1-21) follows
vj = gjlvl = gjlg
lkvk ⇒ gjlglk = δk
j (1–23)
By the use of (1-20) and (1-21) the following relations between the covariant and the contravari-ant base vectors may be derived
vjgj = vjgj = gjkv
kgj = vjgjkgk
vjgj = vjgj = gjkvkgj = vjg
jkgk
⇒
gj = gjkgk
gj = gjkgk
(1–24)
As seengjk represent the components ofgj in the contravariant vector base. Similarly,gjk
signify the components ofgj in the covariant vector base. Use of (1-10) and (1-11) providesthe following relation between the Cartesian and the covariant vector components
vjij = vjgj = vjckj ik = cj
kvkij
vjgj = vjij = vjdkjgk = dj
kvkgj
⇒
vj = cjkv
k
vj = djkv
k(1–25)
Finally, using (1-21) the scalar product of two vectorsu andv can be evaluated in the followingalternative ways
u · v =
uj vj = ujvj = gjkujvk
uj vj = ujv
j = gjkujvk
(1–26)
where it is noticed thatuj = uj.
1.1.2 Tensors, dyads and polyads
A second order tensorT is defined as a linear mapping of a vectorv onto a vectoru by meansof a scalar product, i.e.
u = T · v (1–27)

1.1 Tensor Calculus 13
Since the vectorsu andv are coordinate independent quantities, the 2nd order tensor T as wellmust be independent of any selected coordinate system chosen for the specification of the rela-tion (1-27). Equations in solid mechanics are independent of the chosen coordinate system forwhich reason these are basically formulated as tensor equations.
A dyad(or outer productor tensor product) of two vectorsa andb is denoted asab. Thepolyadabc formed by three vectorsa, b andc is denoted atriad, and thepolyadabcd formed bythree vectorsa, b, c and is denoted atetrad.
For dyads the following associative rules apply
m (ab) = (ma)b = a (mb) = (ab) m
abc = (ab) c = a (bc)
(ma) (nb) = mn ab
(1–28)
wherem andn are arbitrary constants. Further, the following distributive rules are valid
a (b + c) = ab + ac
(a + b) c = ab + bc
(1–29)
No commutative rule is valid for dyads formed by two vectorsa andb. Hence, in general
ab 6= ba (1–30)
If the outer product of two vectors entering a polyad is replaced by a scalar product of the samevectors a polyad is obtained of an order less by two. This operation is known ascontraction.Contraction of a triad is possible in the following two ways
a · bc = (a · b) c
ab · c = (b · c) a
(1–31)
The scalar product of two dyads, the so-calleddouble contraction, can be defined in two ways
ab ·· cd = (a · c)(b · d)
ab · · cd = (a · d)(b · c)
(1–32)
As seen the symbol” ·· ” defines scalar multiplication between the two first and the two lastvectors in the two duads, whereas” · · ” defines scalar multiplication between the first and thelast vector, and the last and the first vectors in the two dyads. Because of the commutativity ofthe scalar product of two vectors follows
(a · c)(b · d) = (b · d)(a · c) = (c · a)(d · b) = (d · b)(c · a)
(a · d)(b · c) = (b · c)(a · d) = (c · b)(d · a) = (d · a)(c · b)
(1–33)

14 Chapter 1 – Preliminaries
Use of (1-32) and (1-33) provides the following identities for double contraction of two dyads
ab ·· cd = ba ··dc = cd ··ab = dc ··ba
ab · · cd = ba · ·dc = cd · · ab = dc · ·ba
(1–34)
From the second relation of (1-31) follows that the dyadab/(b · c) is mapping the vectorc onto the vectora via a scalar multiplication. From the definition (1-27) follows that thisquantity is a second order tensor. Now, it can be proved that any second order tensor can berepresented as a linear combination of nine dyads, formed asouter product of three arbitrarylinearly independent base vectors. Hence, we have following alternative representations of atensorT in the Cartesian, the covariant and the contravariant bases
T = T jk ijik = T jk gjgk = Tjk gjgk (1–35)
The dyadsijik, gjgk andgjgk form so-calledtensor bases. Obviously, (1-35) represents thegeneralization to second order tensors of (1-20) for the decomposition of a vector in the cor-responding vector bases.T jk, T jk andTjk denotes theCartesian components, the covariantcomponents, and thecontravariant componentsof the second order tensorT. Using (1-10), (1-11), (1-13) and the associate rules (1-28) the following relations between the dyads and tensorcomponents related to the considered three tensor bases maybe derived
ijik = dljd
mk glgm
gjgk = cljc
mk ilim = gjlgkm glgm
gjgk = gjlgkm glgm
(1–36)
T jk = cjl c
kmT lm , T jk = dj
l dkmT lm
Tjk = gjlgkmT lm , T jk = gjlgkmTlm
(1–37)
As seen,cljc
mk andgjlgkm specify the Cartesian and contravariant tensor componentsof the dyad
gjgk, whereasgjlgkm denotes the covariant tensor components ofgjgk. (1-36) and (1-37) rep-resent the equivalent to the relations (1-23) and (1-24) forbase vectors and vector components.In some outlines of tensor calculus the transformation rules in (1-37) between Cartesian andcurvilinear tensor components are used as a defining property of the tensorial character of adoubled indexed quantity, (Spain, 1965), (Synge and Schild, 1966).
Alternatively,T may be decomposed after a tensor base with dyads of mixed covariant andcontravariant base vectors, i.e.
T = T jk gjg
k = T jk gkgj (1–38)
T jk andT j
k represent themixed covariant and contravariant tensor components. In general,T j
k 6= T jk as a consequence ofgjg
k 6= gkgj , i.e. the relative horizontal position of the upperand lower indices of the tensor components is important, andspecify the sequence of covariant

1.1 Tensor Calculus 15
and contravariant base vector in the dyads of the tensor base. Tensor bases with dyads of mixedCartesian and curvilinear base vectors may also be introduced. However, in what follows onlythe mixed curvilinear dyads in (1-38) will be considered. The following identities may bederived from (1-35) and (1-38) by the use of (1-24)
T = T jk gjgk = T jl gjg
l = T jlg
lk gjgk
T = T jk gjgk = T kl glgk = T k
l glj gjgk
T = Tjk gjgk = T lk glg
k = T lkglj g
jgk
T = Tjk gjgk = T lj gjgl = T l
j glk gjgk
⇒
T jk = glk T jl
T jk = gjl T kl
Tjk = gjl Tlk
Tjk = glk T lj
(1–39)
Using (1-23) and (1-39) the following representations of the mixed components in terms ofcovariant and contravariant tensor components may be derived
T kj = gjl T
kl
T kj = gjl T
lk
T kj = gkl Tlj
T kj = gkl Tjl
(1–40)
It follows from (1-40) that, ifT jk = T kj thenT kj = T j
k andTjk = Tkj. A second order tensorfor which the covariant components fulfill the indicated symmetry property is denoted asym-metric tensor.
Let T jk denote the covariant components of a second order tensorT. The related so-calledtransposed tensorTT is defined as the tensor with the covariant componentsT kj, i.e.
TT = T kj gjgk (1–41)
For a symmetric tensorT jk = T kj for which reasonTT = T.
The identity tensoris defined as the tensor with the covariant and contravariantcomponentsgjk
andgjk, i.e.
g = gjk gjgk = gjk gjgk = δkj gjgk (1–42)
The mixed components follows from (1-23) and (1-40)
gkj = gjl g
kl = δkj
g kj = gjl g
lk = δkj
(1–43)
Hence, the mixed components are equal to the Kronecker’s delta, which explains the last state-ment for the mixed representation in (1-42). The name identity tensor stems from the fact thatg maps any vectorv onto itself. Actually,

16 Chapter 1 – Preliminaries
g · v = gjk gjgk · vl gl = gjkvl gj δl
k = gjkvk gj = vj gj = v (1–44)
The length of a vectorv is determined from
|v|2 = v · v = v · g · v = gjkvjvk = gjkvjvk (1–45)
Because of its relationship to the length of a vector the identity tensor is also designated themetric tensoror thefundamental tensor.
The incrementdx of the the position vectorx as given by (1-6), due to independent incrementdxj anddθj of the Cartesian or curvilinear coordinates becomes
dx = dxj ij = dθj gj (1–46)
Then, the lengthds of the incremental position vector becomes, cf. (1-45)
ds2 = dxjdxj = gjkdθjdθk (1–47)
The inverse tensorT−1 of the tensorT is defined from the identity
T−1 ·T = T ·T−1 = g (1–48)
Let T−1jl denote the contravariant components ofT−1, andTmk the covariant components ofT.
Then,
g = δkj gjgk = T−1 ·T = T−1
jl gjgl · Tmk gmgk = T−1jl Tmkδl
m gjgk = T−1jl T lk gjgk ⇒
T−1jl T lk = δk
j (1–49)
In matrix notation this means that the three dimensional matrix, which stores the componentsT−1
jl , is the inverse of the matrix, which stores the componentsT lk. Similarly, the covariantcomponents(T−1)jl of T−1 and the contravariant componentsTlk of T are stored in inversematrices. In contrast, the matrices which store the contravariant componentsT−1
jl andTlk willnot be mutual inverse. From (1-15) follows that
gj · T · gk = gj ·(
T lm glgm
)
· gk = T lmδjl δ
km) = T jk ⇒
T jk = gj · T · gk (1–50)
Similarly,

1.1 Tensor Calculus 17
Tjk = gj · T · gk
T kj = gj · T · gk
T jk = gj · T · gk
Tjk = ij · T · ik
(1–51)
Next, thesecond Piola-Kirchhoff stress tensorS and its virtual work conjugated strain measuretheGreen strain tensorE are considered. In the Cartesian, covariant, contravariant and mixedtensor bases these are represented as follows
S = Sjk ijik = Sjk gjgk = Sjk gjgk = S kj gjgk = Sj
k gjgk
E = Ejk ijik = Ejk gjgk = Ejk gjgk = E kj gjgk = Ej
k gjgk
(1–52)
Because the Piola-Kirchhoff stress tensor and the Green strain tensor are both symmetric tensorstheir mixed tensor components fulfillS k
j = Sjk andE k
j = Ejk. For this reason we shall
simply use the notaionsSkj andEk
j for these quantities in what follows. The indicated Cartesian,covariant, contravariant and mixed tensor components for the stress tensor are related as follows,cf. (1-37), (1-39)
Sjk = gjlgkm Slm , Sjk = gjlSkl
Sjk = gjlgkm Slm , Sjk = gjlSlk
Skj = gkl Slj , Sk
j = gjlSlk
Sjk = djl d
km Slm , Sjk = cj
l ckm Slm
(1–53)
Completely analog relations prevail for the components of the Green tensor. For aphysicallinear materiala linear mapping of the Green tensor onto the Piola-Kirchhoff stress tensor viaa double contraction with theelasticity tensorC, i.e.
S = C ··E (1–54)
C is a fourth order tensor, which can be specified in any tensor base with tetrads made upofeither the base vectors of the Cartesian, the covariant or the contravariant vector bases as follows
C = Cjklm gjgkglgm = C klmj gjgkglgm = Cj lm
k gjgkglgm = Cjk m
l gjgkglgm
= Cjklm gjgkglg
m = C lmjk gjgkglgm = C k m
j l gjgkglgm = C kl
j m gjgkglgm
= Cj mkl gjg
kglgm = Cj lk m gjg
kglgm = Cjk
lm gjgkglgm = Cj
klm gjgkglgm
= C kj lm gjgkg
lgm = C ljk m gjgkglg
m = C mjkl gjgkglgm = Cjklm gjgkglgm
= Cjklm ijikilim
(1–55)

18 Chapter 1 – Preliminaries
Formally, the relations between the various mixed tensor components can be derived by raisingand lowering indices by means of the covariant componentsgjk and the contravariant compo-nentsgjk of the identity tensorg, cf. (1-53). As an example
Cjklm = glrgms Cjkrs (1–56)
Normally, the components of the elasticity tensor is specified in the Cartesian coordinate sys-tem. The relation between the Cartesian componentsCrstu and the covariant componentsCjklm
becomes, cf. (1-53)
Cjklm = djrd
ksd
ltd
mu Crstu (1–57)
The following relation between the covariant components ofS andE may be derived, cf. (1-15),(1-32)
S = Sjk gjgk = C ··E = Cjklm gjgkg
lgm ··Ers grgs =
CjklmErs gjgk (glgm ·· grgs) = Cjk
lmErs gjgk(gl · gr)(g
m · gs) =
CjklmErsδl
rδms gjgk = Cjk
lmElm gjgk ⇒
Sjk = Cjklm Elm (1–58)
If the alternative definition of the double contraction in (1-32) is used, the following result isobtained for the tensor representation ofS
S = C · ·E = CjklmEml gjgk (1–59)
Since,Elm = Eml, the indicated definitions provide the same result for the stress components.Expressed in the mixed components ofE andS the constitutive equations on components formmay be given in the following ways
Skj = C k l
j m Eml = C kl
j m Eml = Cj l
k m Eml = Cj l
km Eml (1–60)
Clearly, the symmetry of the stress and strain tensor implies the following symmetry proper-ties of the mixed elasticity tensor componentsCjk
lm = Ckjlm = Cjk
ml = Ckjml andC k l
j m =
C klj m = Cj l
k m = Cj lkm .
Finally, the double contraction ofS andE may be evaluated in the following alternative ways
S ··E = S · ·E = Sjk Ejk = Sjk Ejk = Skj Ej
k (1–61)

1.1 Tensor Calculus 19
1.1.3 Gradient, covariant and contravariant derivatives
Consider a scalar functiona = a(xl) = a(θl) of the Cartesian or curvilinear coordinates.The gradientof a, denoted as∇a, is a vector with the following Cartesian and contravariantrepresentations
∇a =∂a
∂xjik =
∂a
∂θjgj (1–62)
Let ∆θk denote the increments of the curvilinear coordinated, and define the incremental vector∆θ = ∆θk gk. The corresponding increment∆a of the scalar is determined by
∆a = ∇a · ∆θ =∂a
∂θjgj · ∆θk gk =
∂a
∂θj∆θj (1–63)
Thegradient of a vector functionv = v(xl) = v(θl), denoted as∇v, is a second order tensor,which in complete analogy to (1-63) associates to any incremental vector∆θ = ∆θk gk acorresponding increment∆v = ∇v · ∆θ = ∂v
∂θj ∆θj of the vectorv. The gradient tensor hasthe following representations
∇v =
∂v
∂xkik =
∂(vj ij)
∂xkik =
∂vj
∂xkijik
∂v
∂θkgk =
∂(vj gj)
∂θkgk =
(
∂vj
∂θkgj + vj ∂gj
∂θk
)
gk
∂v
∂θkgk =
∂(vj gj)
∂θkgk =
(
∂vj
∂θkgj + vj
∂gj
∂θk
)
gk
(1–64)
At the derivation of the Cartesian representation it has been used that the base vectorij isconstant as a function ofxl. In contrast, the curvilinear base vectors depend on the curvilinearcoordinates, which accounts for the second term within the parentheses in (1-64). Clearly,∂gj
∂θk
and ∂gj
∂θk are vectors, which may hence be decomposed in the covariant and contravariant vectorbases as follows
∂gj
∂θk=
l
j k
gl
∂gj
∂θk= −
j
l k
gl
(1–65)
l
j k
signify the covariant components of∂gj
∂θk , and
j
l k
is the contravariant components of∂gj
∂θk .
l
j k
is denoted theChristoffel symbol. This is related to the co- and contravariant componentsof the identity tensor as follows
l
j k
=1
2glm
(
∂gjm
∂θk+
∂gkm
∂θj− ∂gjk
∂θm
)
(1–66)

20 Chapter 1 – Preliminaries
(1-65) and (1-66) have been proved in Box 1.1. From (1-66) follows that the Christoffel symbolsfulfill the symmetry condition
l
j k
=
l
k j
(1–67)
From (1-8) follows that
∂gj
∂θk=
∂2x
∂θj∂θk=
∂2x
∂θk∂θj=
∂gk
∂θj(1–68)
Alternatively, the symmetry property (1-67) follows from (1-65) and (1-66).
Box 1.1: Proof of (1-65) and (1-66)
We consider the first relation in (1-65) as a definition of the Christoffel symbol, and provethat this implies the second. From (1-15) and the first relation in (1-65) follows
∂
θkδjm =
∂
∂θk
(
gm · gj)
=∂gm
∂θk· gj + gm · ∂gj
∂θk= 0 ⇒
∂gj
∂θk· gm = −
l
m k
gl · gj = −
l
m k
δjl = −
j
m k
= −
j
l k
δlm =
−
j
l k
gl · gm = 0 ⇒
(
∂gj
∂θk+
j
l k
gl
)
· gm = 0 (1–69)
Since, (1-69) is valid for any of the three covariant base vectors the term within thebracket must be equal to0. This proves the validity of the second relation (1-65).
From (1-22) and the first relation (1-65) follows
∂gjm
∂θk=
∂(gj · gm)
∂θk=
∂gj
∂θk· gm +
∂gm
∂θk· gj =
n
j k
gnm +
n
m k
gnj (1–70)

1.1 Tensor Calculus 21
From (1-70) follows
∂gjm
∂θk+
∂gkm
∂θj− ∂gjk
∂θm=
n
j k
gnm +
n
m k
gnj +
n
k j
gnm +
n
m j
gnk −
n
j m
gnk −
n
k m
gnj =
2
n
j k
gnm (1–71)
where the symmetry property (1-67) has been used. Next, (1-66) follows from (1-71)upon multiplication on both sides withglm and use of (1-23).
Use of (1-65) in (1-66) provides the following representations of∇v
∇v = vj;k gjg
k = vj;k gjgk (1–72)
where
vj;k =
∂vj
∂θk+
j
k l
vl
vj;k =∂vj
∂θk−
l
j k
vl
(1–73)
Hence,vj;k specifies the mixed co-and contravariant components of∇v, andvj;k specifies the
contravariant components. For the partial derivative of the vector functionv(θl) the followingrepresentations may be derived by the use of (1-64)
∂v
∂θk=
∂(vjgj)
∂θk=
∂vj
∂θkgj +
∂gj
∂θkvj = vj
;k gj
∂(vjgj)
∂θk=
∂vj
∂θkgj +
∂gj
∂θkvj = vj;k gj
(1–74)
Hence,vj;k andvj;k may alternatively be interpreted as the covariant components and the con-
travariant components of the vector∂v
∂θk . For this reasonvj;k is referred to as thecovariant
derivative, andvj;k as thecontravariate derivativeof the componentsvj andvj, respective. Inthe applied notation these derivatives will always be indicated by a semicolon.
Further, by the use of (1-65) the following results for the derivatives of the dyads entering thecovariant, mixed and contravariant tensor bases become

22 Chapter 1 – Preliminaries
∂
∂θl(gjgk =
∂gj
∂θlgk + gj
∂gk
∂θl=
m
j l
gmgk +
m
k l
gjgm
∂
∂θl(gjg
k) =∂gj
∂θlgk + gj
∂gk
∂θl=
m
j l
gmgk −
k
m l
gjgm
∂
∂θl(gjgk) =
∂gj
∂θlgk + gj ∂gk
∂θl= −
j
m l
gmgk+
m
k l
gjgm
∂
∂θl(gjgk) =
∂gj
∂θlgk + gj ∂gk
∂θl= −
j
m l
gmgk−
k
m l
gjgm
(1–75)
Finally, the covariant and covariant representations of the increment∆v of the vectorv due tothe incremental vector∆θ = ∆K gk of the curvilinear coordinates becomes
∆v = ∇v · ∆θ = vj;k gjg
k · ∆θl gl = vj;k gjgk · ∆θl gl ⇒
∆v = vj;k ∆θk gj = vj;k ∆θk gj (1–76)
The gradient of a second order tensor functionT = T(θl), denoted as∇T, is a third ordertensorwith the following representations
∇T =∂T
∂θlgl =
∂(T jk gjgk)
∂θlgl =
(
∂T jk
∂θlgjgk + T jk ∂gj
∂θlgk + T jk gj
∂gk
∂θl
)
gl
∂(T jk gjg
k)
∂θlgl =
(
∂T jk
∂θlgjg
k + T jk
∂gj
∂θlgk + T j
k gj∂gk
∂θl
)
gl
∂(T kj gjgk)
∂θlgl =
(
∂T kj
∂θlgjgk + T k
j
∂gj
∂θlgk + T k
j gj ∂gk
∂θl
)
gl
∂(Tjk gjgk)
∂θlgl =
(
∂Tjk
∂θlgjgk + Tjk
∂gj
∂θlgk + Tjk gj ∂gk
∂θl
)
gl
⇒
∇T =
(
∂T jk
∂θl+ Tmk
j
m l
+ T jm
k
m l
)
gjgkgl = T jk
;l gjgkgl
(
∂T jk
∂θl+ Tm
k
j
m l
− T jm
m
k l
)
gjgkgl = T j
k;l gjgkgl
(
∂T kj
∂θl− T k
m
m
j l
+ T mj
k
m l
)
gjgkgl = T k
j ;l gjgkg
l
(
∂Tjk
∂θl− Tkm
m
j l
− Tjm
m
k l
)
gjgkgl = Tjk;l gjgkgl
(1–77)

1.1 Tensor Calculus 23
where
T jk;l =
∂T jk
∂θl+ Tmk
j
m l
+ T jm
k
m l
T jk;l =
∂T jk
∂θl+ Tm
k
j
m l
− T jm
m
k l
T kj ;l =
∂T kj
∂θl− T k
m
m
j l
+ T mj
k
m l
Tjk;l =∂Tjk
∂θl− Tkm
m
j l
− Tjm
m
k l
(1–78)
where (1-65) has been used in the last statement. Then, the partial derivative of the tensorfunctionT(θm) may be written in any of the following alternative second order tensor repre-sentations, cf. (1-74)
∂T
∂θl= T jk
;l gjgk = T jk;l gjg
k = Tjk;l gjgk (1–79)
Partial differentiation of both sides of (1-44) provides
∂v
∂θk=
∂g
∂θk· v + g · ∂v
∂θk=
∂g
∂θk· v +
∂v
∂θk⇒
∂g
∂θk· v = 0 (1–80)
Sincev is arbitrary (1-80) implies that
∂g
∂θk= 0 (1–81)
In turn this means that∇g = 0. Hence, the identity tensor is constant under covariant differen-tiation.
1.1.4 Riemann-Christoffel tensor
The gradient of a vectorv with decomposition into Cartesian and curvilinear tensor bases havebeen indicated by (1-64). The gradient of this second order tensor is given as, cf. (1-73), (1-74)
∇(∇v) =
∂
∂xl
(
∂v
∂xkik
)
il =∂
∂xl
(
∂(vj ij)
∂xkik
)
il =∂2vj
∂xk∂xlijikil
∂
∂θl
(
∂v
∂θkgk
)
gl =∂
∂θl
(
(
∂vj
∂θk+
j
k m
vm
)
gjgk
)
gl = vj;kl gjg
kgl
∂
∂θl
(
∂v
∂θkgk
)
gl =∂
∂θl
(
(
∂vj
∂θk−
m
j k
vm
)
gjgk
)
gl = vj;kl gjgkgl
(1–82)

24 Chapter 1 – Preliminaries
where the following tensor components have been introduced
vj;kl = (vj
;k);l =∂2vj
∂θk∂θl+
j
k m
∂vm
∂θl+
j
l m
∂vm
∂θk−
m
k l
∂vj
∂θm−
j
n m
n
k l
vm +
∂
∂θl
j
k m
vm +
j
l n
n
k m
vm (1–83)
vj;kl = (vj;k);l =∂2vj
∂θk∂θl−
m
j k
∂vm
∂θl−
m
j l
∂vm
∂θk−
m
k l
∂vj
∂θm+
n
k l
m
n j
vm −
∂
∂θl
m
j k
vm +
n
j l
m
n k
vm (1–84)
From (1-83) and (1-84) follow that the indicesk andl can be interchanged in the first five termson the right hand sides without changing the value of this part of the expressions, whereasthis is not the case for the last two terms. This implies that the sequence in which the covariantdifferentiations is performed is significant, i.e. in generalvj;kl 6= vj;lk. In order to investigate thisfurther the so-calledRiemann-Christoffel tensorR is introduced, which is a fourth order tensorwith the mixed representationR = Rm
jkl gmgjgkgl, where the mixed curvilinear componentsare defined as
Rmjkl =
n
j l
m
n k
−
n
j k
m
n l
+∂
∂θk
m
j l
− ∂
∂θl
m
j k
(1–85)
Obviously,
Rmjkl = −Rm
jlk (1–86)
Further, the following relations are valid
Rmjkl + Rm
klj + Rmljk = 0
Rjjkl = 0
(1–87)
The relations (1-87) follow by insertion of (1-85) and use ofthe symmetry property (1-67) ofthe Christoffel symbol. From (1-84) and (1-85) follows that
Rmjkl vm = vj;kl − vj;lk (1–88)
The Cartesian components ofR follow from (1-82)
Rjklm vm =∂2vj
∂xk∂xl− ∂2vj
∂xl∂xk= 0 ⇒
Rjklm = 0 (1–89)
Hence, it can be concluded thatR = 0 in an Euclidean three-dimensional space, i.e. a spacespanned by a Cartesian vector basis. In turn this means that also the curvilinear components

1.1 Tensor Calculus 25
(1-85) must vanish in this space. A space, where everywhereR = 0 is calledflat. Reversely,a non-vanishing Riemann-Cristoffel tensor indicates a curved space. In a flat spaceRm
jkl = 0,with the implication thatvj;kl = vj;lk. The three-dimensional Eucledian space is flat, and anyplane in this space forms a flat two-dimensional subspace. Incontrast, a curved surface in theEucledian space is not a flat subspace. An example of a curved four-dimensional space is thetime-space continuum used at the formulation of the generaltheory of relativity, where the in-dices correspondingly range overj = 1, 2, 3, 4.
Because of the identities (1-86), (1-87) it can be shown thatonly 112
N2(N2 − 1) of the ten-sor componentsRm
jkl are independent and non-trivial, whereN denotes the dimension of thespace, (Spain, 1965). Hence, for a two-dimensional space only one independent componentexists, which can be chosen asR1
212. In the three-dimensional case six independent and non-trivial components exist, which are chosen asR1
212, R1213, R1
223, R1313, R1
323 andR2323.
Example 1.1: Covariant base vectors, identity tensor and Riemann-Christoffel tensor inspherical coordinates
By the use of (1-10) the first equation (1-65) becomes
∂(cmj im)
∂θk=
∂cmj
∂θkim =
l
j k
cml im ⇒
∂cmj
∂θk=
l
j k
cml (1–90)
The Cartesian componentscmj of the covariant base vectorgj is stored in the column matrixg
j= [cm
j ]. Then,(1-88) may be written in the following matrix form
∂gj
∂θk=
l
j k
gl=
1
j k
g1
+
2
j k
g2+
3
j k
g3
(1–91)
The spherical coordinate system defined by (1-1) is considered. In this case the column matrices attain the form,cf. (1-12)
g1
=
θ3 cos θ1 cos θ2
θ3 cos θ1 sin θ2
−θ3 sin θ1
, g
2=
−θ3 sin θ1 sin θ2
θ3 sin θ1 cos θ2
0
, g
3=
sin θ1 cos θ2
sin θ1 sin θ2
cos θ1
(1–92)
The covariant components of the identity tensor is given by (1-22) asgjk = gj · gk = gT
jg
k, where the last
statement is obtained by evaluating the scalar product in Cartesian coordinates. The covariant and contravariantcomponents of the identity tensor are conveniently stored in matrices. Using (1-92) these becomes
[ gjk ] =
(θ3)2 0 0
0 (θ3)2 sin2 θ1 0
0 0 1
,[
gjk]
=
1
(θ3)20 0
01
(θ3)2 sin2 θ10
0 0 1
(1–93)
The result for the contravariant components follows from (1-23). Next, (1-91) will be used to determine theChristoffel symbols by direct specification of the decomposition on the right hand side. Using (1-92) the followingresults are obtained

26 Chapter 1 – Preliminaries
∂g1
∂θ1=
−θ3 sin θ1 cos θ2
−θ3 sin θ1 sin θ2
−θ3 cos θ1
= 0 · g
1+ 0 · g
2− θ3 · g
3⇒
1
1 1
= 0
2
1 1
= 0
3
1 1
= −θ3
∂g1
∂θ2=
−θ3 cos θ1 sin θ2
θ3 cos θ1 cos θ2
0
= 0 · g
1+
1
tan θ1· g
2+ 0 · g
3⇒
1
1 2
= 0
2
1 2
=1
tan θ1
3
1 2
= 0
∂g1
∂θ3=
cos θ1 cos θ2
cos θ1 sin θ2
− sin θ1
=
1
θ3· g
1+ 0 · g
2+ 0 · g
3⇒
1
1 3
=1
θ3
2
1 3
= 0
3
1 3
= 0
∂g2
∂θ1=
−θ3 cos θ1 sin θ2
θ3 cos θ1 cos θ2
0
= 0 · g
1+
1
tan θ1· g
2+ 0 · g
3⇒
1
2 1
= 0
2
2 1
=1
tan θ1
3
2 1
= 0
∂g2
∂θ2=
−θ3 sin θ1 cos θ2
−θ3 sin θ1 sin θ2
0
= −1
2sin(2θ1) · g
1+ 0 · g
2− θ3 sin2 θ1 · g
3⇒
1
2 2
= −1
2sin(2θ1)
2
2 2
= 0
3
2 2
= −θ3 sin2 θ1
∂g2
∂θ3=
− sin θ1 sin θ2
sin θ1 cos θ2
0
= 0 · g
1+
1
θ3· g
2+ 0 · g
3⇒
1
2 3
= 0
2
2 3
=1
θ3
3
2 3
= 0
∂g3
∂θ1=
cos θ1 cos θ2
cos θ1 sin θ2
− sin θ1
=
1
θ3· g
1+ 0 · g
2+ 0 · g
3⇒
1
3 1
=1
θ3
2
3 1
= 0
3
3 1
= 0
∂g3
∂θ2=
− sin θ1 sin θ2
sin θ1 cos θ2
0
= 0 · g
1+
1
θ3· g
2+ 0 · g
3⇒
1
3 2
= 0
2
3 2
=1
θ3
3
3 2
= 0
∂g3
∂θ3=
0
0
0
= 0 · g1+ 0 · g
2+ 0 · g
3⇒
1
3 3
= 0
2
3 3
= 0
3
3 3
= 0
(1–94)

1.1 Tensor Calculus 27
The non-trivial components of the Riemann-Christoffel tensor follow from (1-85) and (1-94)
R1
212=
n
2 2
1
n 1
−
n
2 1
1
n 2
+∂
∂θ1
1
2 2
− ∂
∂θ2
1
2 1
=
− 1
2sin(2θ1) · 0 + 0 · 0 − θ3 sin2 θ1 · 1
θ3+ 0 · 0 +
1
tan θ1· 1
2sin(2θ1) − 0 · 0 − cos(2θ1) − 0 = 0
R1
213=
n
2 3
1
n 1
−
n
2 1
1
n 3
+∂
∂θ1
1
2 3
− ∂
∂θ3
1
2 1
=
0 · 0 +1
θ3· 0 + 0 · 1
θ3− 0 · 1
θ3− 1
tan θ1· 0 − 0 · 0 + 0 − 0 = 0
R1
223=
n
2 3
1
n 2
−
n
2 2
1
n 3
+∂
∂θ2
1
2 3
− ∂
∂θ3
1
2 2
=
0 · 0 − 1
θ3· 1
2sin(2θ1) + 0 · 0 +
1
2sin(2θ1) · 1
θ3− 0 · 0 + θ3 sin2 θ1 · 0 + 0 − 0 = 0
R1
313=
n
3 3
1
n 1
−
n
3 1
1
n 3
+∂
∂θ1
1
3 3
− ∂
∂θ3
1
3 1
=
0 · 0 + 0 · 0 + 0 · 1
θ3− 1
θ3· 1
θ3− 0 · 0 − 0 · 0 +
1
(θ3)2= 0
R1
323=
n
3 3
1
n 2
−
n
3 2
1
n 3
+∂
∂θ2
1
3 3
− ∂
∂θ3
1
3 2
=
0 · 0 − 0 · 1
2sin(2θ1) + 0 · 0 − 0 · 1
θ3− 0 · 0 − 0 · 0 + 0 − 0 = 0
R2
323=
n
3 3
2
n 2
−
n
3 2
2
n 3
+∂
∂θ2
2
3 3
− ∂
∂θ3
2
3 2
=
0 · 1
tan θ1+ 0 · 0 + 0 · 1
θ3− 0 · 0 − 1
θ3· 1
θ3− 0 · 0 + 0 +
1
(θ3)2= 0
(1–95)
As expected all components of the Riemann-Christoffel tensor vanish as a consequence of the flatness of the three-dimensional Euclidean space.

28 Chapter 1 – Preliminaries
1.2 Differential Theory of Surfaces
1.2.1 Differential geometry of surfaces, first fundamental form
Fig. 1–3 a) Parameter space. b) Surface space.
Let the sphericalθ3 coordinate be fixed at the valueθ3 = r. Then, the mapping (1-1) of thespherical coordinates onto the Cartesian coordinates takes the form
x1
x2
x3
=
r1
r2
r3
=
r sin θ1 cos θ2
r sin θ1 sin θ2
r cos θ1
(1–96)
(r1, r2, r3) denotes the Cartesian components of the position vectorr to a given point of thesurface. Obviously,(r1)2 + (r2)2 + (r3)2 = r2. Hence, with the zenith angle varied in theintervalθ1 ∈ [0, π], and the azimuth angle varied in the intervalθ2 ∈]0, 2π], (1-96) representsthe parametric description of a sphere with the radiusr and the center at(r1, r2, r3) = (0, 0, 0).In what follows it is assumed that the parametric description of all considered surfaces is definedby a constant value of the curvilinear coordinateθ3 = c3 in the mapping (1-2). Then, a givensurfaceΩ is given as, cf. (1-5)
rj = f j(θ1, θ2, c3) = f j(θα) (1–97)
In the last statement of (1-97) the explicit dependence on the constantc3 is ignored, as willalso be the case in the following. Let the mapping (1-97) be defined within a domainω in theparameter space. For each pointp ∈ ω determined by the parameters(θ1, θ2), a given pointPis defined onΩ with Cartesian coordinates given by (1-97). Assume that a curve throughp isspecified by the parametric description
(
θ1(t), θ2(t))
, wheret is the free parameter. Then, thiscurve is mapped onto a curves = s(t) throughP onΩ as shown on Fig. 1-3. Especially, if thecurvilinear coordinateθ1 is fixed, whereasθ2 is varied independently a curves1 throughP isdefined onΩ. Similarly, a curves2 on the surface throughP is obtained, ifθ1 is fixed andθ2 isvaried. The positive direction ofs1 ands2 are defined, so positive increments ofθα correspond

1.2 Differential Theory of Surfaces 29
to positive increments ofsα. Then, these curves define a local two-dimensional arch length co-ordinate system(s1, s2) throughP . Assume thatω is a rectangular domain[a1, a2]×[b1, b2] withsides parallel to theθα axes as shown on Fig. 1-3a. As an example this is the case for the map-ping (1-96), whereω = [0, π]×]0, 2π]. In such cases the surfaceΩ will be bounded by the arclength coordinate curves given by the parameter descriptionsrj = f j(a1, θ2), rj = f j(a1, θ2),rj = f j(θ1, b1) andrj = f j(θ1, b2), see Fig. 1-3b.
Sincedθ3 = 0, when merelyθ1 andθ2 are varied inω, the incrementdr of the position vectorrto the pointP on the surface is given as by the following Cartesian and curvilinear representa-tions, cf. (1-6)
dr = dr1 i1 + dr2 i2 + dr3 i3 = dθ1 a1 + dθ2 a2 ⇒dr = drj ij = dθα aα (1–98)
where the covariant base vectors becomes, cf. (1-8)
aα =∂r
∂θα(1–99)
Fig. 1–4 Covariant and contravariant base vectors in the tangent plane.
aα are tangential to the arch length curves atP , see Fig. 1-3b.aα may then be interpreted as alocal two-dimensional covariant vector bases, which spansthe tangent planeA at the pointP ,see Fig. 1-4. The indicated covariant vectors may be represented in the Cartesian vector basisas, cf. (1-10)
aα = cjα ij (1–100)
where the Cartesian componentscjα are given by (1-12).

30 Chapter 1 – Preliminaries
At the pointP aunit normal vectora3 to the surface and the tangent plane is defined as
a3 =a1 × a2
|a1 × a2|=
1
Aa1 × a2 (1–101)
A denotes the area of the parallelogram spanned bya1 anda2, and given as
A = |a1 × a2| = |a1||a2| sin ϕ (1–102)
whereϕ denotes the angle betweena1 anda2, see Fig. 1-4. Using (1-16) withV = 1 · A = A,a contravariant basis atP may be defined by the relations
a1 =1
Aa2 × a3 =
1
(A)2a2 × (a1 × a2) =
1
(A)2
(
|a2|2 a1 − (a1 · a2) a2
)
a2 =1
Aa3 × a1 =
1
(A)2(a1 × a2) × a1 =
1
(A)2
(
|a1|2 a2 − (a1 · a2) a1
)
a3 =1
Aa1 × a2 = a3
(1–103)
The last statements of the results fora1 anda2 follow from the vector identitiesa × (b× c) =(a · c)b − (b · a) c and(a × b) × c = (a · c)b − (b · c) a. The basic relation between thecovariant and contravariant base vectors in the tangent plane becomes, cf. (1-15)
aα · aβ = δβα (1–104)
(1-104) may alternatively be proved from the last statements in (1-103), using (1-102) anda1 · a2 = |a1||a2| cosϕ.
The unit normal vectora3 = a3 is orthogonal to both the covariant and the contravariant basevectors in the tangent plane, so
a3 · aα = a3 · aα = 0 (1–105)
Then, the covariant and contravariant componentsgjk andgjk of the three-dimensional identitytensor can be stored in the following matrices
[ gjk ] =
a11 a12 0
a21 a22 0
0 0 1
,[
gjk]
=
a11 a12 0
a21 a22 0
0 0 1
(1–106)
A surface vector functionv = v(θ1, θ2) is a vector field, which everywhere (i.e. for anyparameters(θ1, θ2) ) is tangential to the surface. Then,v may be represented by the followingCartesian, covariant and contravariant representations

1.2 Differential Theory of Surfaces 31
v = vj ij = vα aα = vα, aα (1–107)
wherevj, vα andvα denote the Cartesian, the covariant and the contravariant components ofv.v3 = v3 = 0 for a surface vector, for which reason only two components enter the curvilinearrepresentations. The Cartesian and the covariant components are related as, cf. (1-25)
vj = cjα vα
vα = dαj vj
(1–108)
Similarly, the covariant and contravariant components arerelated by the following relationsanalog to (1-22)
vα = aαβ vβ
vα = aαβ vβ
(1–109)
where
aαβ = aα · aβ
aαβ = aα · aβ
(1–110)
As a consequence of the structure (1-106) of the covariant and contravariant components of theidentity tensor it follows that, cf. (1-23)
aαγaγβ = δβ
α (1–111)
whereδβα denotes the Kronecker’s delta in two dimensions. Bothaα andaα are surface vectors.
Then, these can be expanded in two-dimensional contravariant and covariant vector bases asfollows, cf. (1-24)
aα = aαβaβ
aα = aαβaβ
(1–112)
In analogy to (1-27), asurface second order tensoris defined as a second order tensor, whicheverywhere maps a surface vectorv onto another surface vectoru by means of a scalar product.A second order surface tensorT admits the following Cartesian, covariant, contravariantandmixed representations, cf. (1-35)
T = T jk ijik = T αβ aαaβ = Tαβ aαaβ = T αβ aαa
β = T βα aαaβ (1–113)

32 Chapter 1 – Preliminaries
T αβ, Tαβ, T αβ andT β
α denotes the covariant, the contravariant and the mixed covafriant andcontravariant components of the surface tensor. These are related as, cf. (1-39), (1-40)
Tαβ = aαγaβδ T γδ , T αβ = aαγ Tγβ
T αβ = aαγaβδ Tγδ , T βα = aαγ T γβ
Tαβ = aαγ T γβ , T αβ = aαγ T β
γ
(1–114)
Thesurface identity tensora is defined as a second order tensor with the covariant componentsaαβ , the contravariant componentsaαβ , and the mixed componentsδβ
α, corresponding to thefollowing representations, cf. (1-42)
a = aαβ aαaβ = gαβ aαaβ = δβα aαaβ (1–115)
a will map any surface vector onto itself, i.e.
a · v = v (1–116)
(1-116) is proved in the same way as (1-44), using the representation (1-115). Letdr be a differ-ential increment of the position vectorr due to an incrementdθα of the parameters. Obviously,dr is a surface vector with the representation (1-98). The length ds of the incremental vectorbecomes
ds2 = dr · dr = dr · a · dr = dθα aα · aβ dθβ = aαβ dθαdθβ (1–117)
Obviously, the tensora determines the length of any surface vector, for which reason the alter-native namingsurface metric tensoris used. The quadratic form in the last statement of (1-117)is called thefirst fundamental formof the surface.
The partial derivatives of the covariant and contravariantbase vectors are unchanged given by(1-65)
∂aj
∂θα=
l
j α
al =
β
j α
aβ +
3
j α
a3
∂aj
∂θα= −
j
l α
al = −
j
β α
aβ −
j
3 α
a3
(1–118)
a3 = a3 is orthogonal to bothaβ andaβ , so a3 · aβ = 0 anda3 · aβ = 0. Then, scalarmultiplication of the first equation in (1-118) witha3 and scalar multiplication of the secondequation witha3 provides
a3 · ∂aj
∂θα=
3
j α
a3 ·∂aj
∂θα= −
j
3 α
(1–119)

1.2 Differential Theory of Surfaces 33
where it has been used thata3 · a3 = 1. Becausea3 = a3, the left hand sides of (1-119) areidentical forj = 3. However, the right hand sides have opposite signs in this case. Both can thenonly be truth if the right hand sides vanish, leading to the following result for the Christoffelsymbol
3
3 α
= 0 (1–120)
(1-120) implies that∂a3
∂θα is orthogonal to the surface normala3 = a3, and hence must be asurface vector.
Obviously, the increment vector∆θ = ∆θβ aβ with the covariant components∆θβ is a surfacevector. The gradient∇v of a surface vector functionv = v(θγ) is a surface second order tensor,which to the increment vector∆θ associates a surface increment vector∆v = ∇v · ∆θ =∂v
∂θα ∆θα of the vectorv. The gradient tensor has the following curvilinear representations,which merely follow by replacing the latin indices with greek indices in (1-72), (1-73)
∇v = vα;β aαa
β = vα;β aαaβ (1–121)
where
vα;β =
∂vα
∂θβ+
α
β γ
vγ
vα;β =∂vα
∂θβ−
γ
α β
vγ
(1–122)
vα;β andvα;β will be referred to as thesurface contravariant derivativeandsurface covariant
derivativeof the componentsvα andvα.
Correspondingly, the gradient∇T of a surface second order tensor functionT = T(θγ) is asurface third order tensor with the following curvilinear representations, cf. (1-77), (1-78)
∇T = T αβ;γ aαaβa
γ = T α;βγ aαa
βaγ = T βα ;γ aαaβa
γ = Tαβ;γ aαaβaγ (1–123)
where
T αβ;γ =
∂T αβ
∂θγ+ T δβ
α
δ γ
+ T αδ
β
δ γ
T αβ;γ =
∂T αβ
∂θγ+ T δ
β
α
δ γ
− T αδ
δ
β γ
T βα ;γ =
∂T βα
∂θγ− T β
δ
δ
α γ
+ T δα
β
δ γ
Tαβ;γ =∂Tαβ
∂θγ− Tβδ
δ
α γ
− Tαδ
δ
β γ
(1–124)

34 Chapter 1 – Preliminaries
The gradient of the gradient of a surface vector is a third order surface tensor with the followingrepresentations, cf. (1-82), (1-83), (1-84)
∇(∇v) = vα;βγ aαa
βaγ = vα;βγ aαaβaγ (1–125)
where
vα;βγ = (vα
;β);γ =∂2vα
∂θβ∂θγ+
α
β µ
∂vµ
∂θγ+
α
γ µ
∂vµ
∂θβ−
µ
β γ
∂vα
∂θµ−
α
ν µ
ν
β γ
vµ +
∂
∂θγ
α
β µ
vµ +
α
γ ν
ν
β µ
vµ (1–126)
vα;βγ = (vα;β);γ =∂2vα
∂θβ∂θγ−
µ
α β
∂vµ
∂θγ−
µ
α γ
∂vµ
∂θβ−
µ
β γ
∂vα
∂θµ+
ν
β γ
µ
ν α
vµ −
∂
∂θγ
µ
α β
vµ +
ν
α γ
µ
ν β
vµ (1–127)
The surface Riemann-Christoffel tensoris denotedB = B(θ1, θ2) to distinguish it from theequivalent tensorR in the three dimensional space. The mixed covariant and contravariantrepresentation becomes, cf. (1-85)
B = Bδαβγ aδa
αaβaγ (1–128)
Bδαβγ =
ν
α γ
δ
ν β
−
ν
α β
δ
ν γ
+∂
∂θβ
δ
α γ
− ∂
∂θγ
δ
α β
(1–129)
In analogy to (1-86) - (1-88) the tensor componentsBδαβγ fulfill the following identities
Bδαβγ = −Bδ
αγβ
Bδαβγ + Bδ
βγα + Bδγαβ = 0
Bααβγ = 0
(1–130)
Bδαβγ vδ = vα;βγ − vα;γβ (1–131)
Due to the identities (1-130) only one independent and non-trivial component exists, which istaken asB1
212.
From (1-85) and (1-129) follow that the components in the tangent planeRδαβγ of the Riemann-
Christoffel tensor in the three-dimensional space is related to the corresponding componentsBδ
αβγ of the surface Riemann-Christoffel tensor as follows

1.2 Differential Theory of Surfaces 35
Rδαβγ = Bδ
αβγ +
3
α γ
δ
3 β
−
3
α β
δ
3 γ
(1–132)
Since, the three-dimensional Eucledian space is flat, we have everywhereRδαβγ = 0. Then, the
following simplified representation for tensor componentsBδαβγ is obtained from (1-132)
Bδαβγ =
3
α β
δ
3 γ
−
3
α γ
δ
3 β
(1–133)
1.2.2 Principal curvatures, second fundamental form
Fig. 1–5 a) Unit tangent vector of a curve. b) Radius of curvature of a curve.
An arbitrary curves(t) on the surfaceΩ is defined by the parametric descriptionr = r(t) =r(
θ1(t), θ2(t))
, wheret is a free parameter as explained subsequent to (1-97).P andQ denotetwo neighboring points on the curve defined by the position vectorsr andr+dr, correspondingto the parameter valuest and t + dt, respectively. The incrementdr with the lengthds is asurface vector placed in the tangent plane atP , and specified by the covariant representationdr = dθα aα. Hence, the unit tangent vector to the curve atP is given as
t =dr
ds=
dθα
dsaα (1–134)
The unit tangent vector inQ deviates infinitesimally fromt, and may be written ast + dt.Given, that the length unchanged is equal to 1, the incrementdt must fulfill
1 = (t + dt) · (t + dt) = t · t + 2 dt · t + dt · dt = 1 + 2 dt · t ⇒dt · t = 0 (1–135)

36 Chapter 1 – Preliminaries
where the second order termdt·dt is ignored. (1-135) shows that the incrementdt is orthogonalto t. Let n denote the unit normal vectorn co-directional todt. Then, the following identitymay be defined
dt
ds= κ0 n (1–136)
(1-136) is referred to asFrenet’s formula. dtds
andn are called thecurvature vectorand theprincipal normal vectorof the curve, respectively, and the proportionality factorκ0 is referredto as thecurvature. Generally, this is always assumed to be positive, so (1-136) is defining theorientation ofn. In Fig. 1-5b lines orthogonal tos have been drawn throughP andQ in theplane spanned byt andn, which intersect each other at thecurvature centerO under the angledα as shown on Fig. 1-5b. The position ofO relative tos is defined by the orientation ofn.Then, the following geometric relation prevails, see Fig. 1-5b
|dt ds| = |t ds| · dα ⇒
|dt| = | t | · dα = 1 · dα =ds
R(1–137)
whereR = OP = OQ denotesthe radius of curvatureat P . Since,|n| = 1 it follows from(1-136) and (1-137) that the curvature has the following geometric interpretation
κ0 =1
R(1–138)
Fig. 1–6 Normal plane to unit tangent vector.
The unit tangent vectort is normal to a planeπ, which contains both to the unit normal vectora3 = a3 and to the principal normal vectorn, see Fig. 1-6. A third linear independent unitvectorag in π is given by the vector
ag = a3 × t (1–139)

1.2 Differential Theory of Surfaces 37
We may then represent the curvature vectordtds
= κ0 n as a linear combination ofa3 andag asfollows
κ0 n = κ a3 + κg ag (1–140)
The expansion componentsκ andκ are known as thenormal curvatureand thegeodesic cur-vatureof the curves. Using thata3 · ag = 0, and both are unit vectors, these may be expressedin terms of the curvatureκ0 of the curve as follows
κ = a3 ·dt
ds= (a3 · n) κ0
κg = a0 ·dt
ds= (a0 · n) κ0
(1–141)
Using the chain rule of partial differentiation it follows from (1-134) that the curvature vectordtds
has the following representation
dt
ds=
d2θα
ds2aα +
∂aα
∂θβ
dθα
ds
dθβ
ds(1–142)
Sincea3 = a3 is orthogonal toaα, it follows from (1-119), (1-141) and (1-142) that
κ = a3 ·dt
ds= a3 · ∂aα
∂θβ
dθα
ds
dθβ
ds=
3
α β
dθα
ds
dθβ
ds= bαβ
dθα
ds
dθβ
ds(1–143)
where the following indexed quantities have been introduced
bαβ = a3 · ∂aα
∂θβ=
3
α β
= bβα (1–144)
The neighbouring pointsP andQ on the curves are given by the position vectorsr(s) andr(s + ds) = r(s) + dr. By the use of (1-134) the incrementdr is given by the Taylor expansion
dr = r(s+ds)− r(s) =dr
dsds+
1
2
d2r
ds2ds2 +O
(
ds3)
= t ds+1
2
dt
dsds2 +O(ds3) (1–145)
The distancedz of Q from the tangent plane atP is given by the projection ofdr on the surfaceunit normal vectora3, see Fig. 1-5. Hence,
dz = a3 · dr =1
2a3 ·
dt
dsds2 =
1
2κ ds2 =
1
2bαβ dθαdθβ (1–146)
where (1-143) and the orthogonality ofa3 andt has been used. The larger the distancedz, thelarger is the curvature of the curve atP . In (1-146) this quantity is partly determined by the

38 Chapter 1 – Preliminaries
componentsbαβ and partly by the parameter incrementsdθα. As seen from (1-144) the com-ponentsbαβ are entirely determined from properties related to the surface, and independent ofthe specific direction of the curves. In contrast this direction is determined by the incrementsdθα of the curvilinear coordinates. The quadratic formbαβ dθαdθβ entering (1-146) is calledthesecond fundamental formof the surface. In what followsbαβ is considered the contravariantcomponents of a surface second order tensorb = bαβ aαaβ , which is called thecurvature tensorof the surface.
Usingaα = aαγ aγ , it follows from (1-119), (1-144) that
bαβ = a3 ·∂(aαγ aγ)
∂θβ= a3 · aγ ∂aαγ
∂θβ+ aαγ a3 ·
∂aγ
∂θβ= aαγ a3 ·
∂aγ
∂θβ= −aαγ
γ
3 β
⇒
α
3 β
= −aαγ bγβ = −bαβ (1–147)
where the orthogonality ofa3 andaγ is used. Insertion of (1-144) and (1-147) into (1-133)provides the following alternative representation of the components of the surface Riemann-Christoffel tensor
Bδαβγ = −bαβbδ
γ + bαγbδβ ⇒
Bδαβγ = −bαβbδγ + bαγbδβ (1–148)
where the transformation rules (1-114) of covariant and contravariant tensor components havebeen used in the final statement. (1-148) provides the following form for the selected indepen-dent tensor componentB1212
B1212 = −b21b12 + b22b11 = det[
bαβ
]
= b (1–149)
whereb denotes the determinant formed by the contravariant components of the curvature ten-sorb. (1-149) is calledGauss’s equation. If B1212 = 0, all other contravariant components ofthe tensor will vanish as well, and it may be concluded thatB = 0. Then, a surface is flat, ifb = 0 everywhere. Noticed that if the determinant of the contravariant components vanish, thedeterminant of the components of any other representation of b vanishes as well.
From (1-117) and (1-143) follows that the normal curvature of a curve on the surface with adirection determined by the incrementdθα is given as
κ =bαβ dθαdθβ
aαβ dθαdθβ(1–150)
(1-150) may be interpreted as aRayleigh quotientrelated to the following generalized eigen-value problem, (Nielsen, 2006)

1.2 Differential Theory of Surfaces 39
(
bαβ − κ aαβ
)
tβ = 0 (1–151)
tβ = dθβ
dsrepresent the covariant components of a unit tangent vectort = tβ aβ to the surface,
which specifies the a direction for which (1-151) is fulfilled. With a = aαβ aαaβ andb =bαβ aαaβ, (1-151) is seen to represent the curvilinear component relation of the following tensorrelation
(
b− κ a)
· t = 0 (1–152)
(1-152) is fulfilled for two unit eigenvectorst1 andt2 related to the eigenvaluesκ1 andκ2 of(1-151). The directions specified on the surface by the eigenvectorstγ are denoted theprinci-pal curvature directions, and the related eigenvalues are calledprincipal curvatures. The uniteigenvectors fulfill the orthogonality conditions, (Nielsen, 2006)
tγ · a · tδ =
0 , γ 6= δ
1 , γ = δ(1–153)
tγ · b · tδ =
0 , γ 6= δ
κγ , γ = δ(1–154)
Let the principal curvatures be ordered, soκ1 denotes the smallest andκ2 the largest curvature.As follows from the well-known bounds on the Rayleigh quotient the normal curvatureκ ofan arbitrary curve passing throughP will be bounded by the principal curvatures as, (Nielsen,2006)
κ1 ≤ κ ≤ κ2 (1–155)
Using the mixed representationsa = δαβ aαa
β andb = bαβ aαa
β the component form of (1-152)attains the form
(
bαβ − κ δα
β
)
tβ = 0 (1–156)
Formally, (1-156) may be obtained from (1-151) by pre-multiplication of aγα and use of (1-111), (1-114). Solutionstβ 6= 0 of the homogeneous system of linear equations (1-156) areobtained, if the determinant of the coefficient matrix vanishes. This provides the followingcharacteristic equationfor the determination of the principal curvatures
det[
bαβ − κ δα
β
]
= κ2 −(
b11 + b2
2
)
κ +(
b11b
22 − b2
1b12
)
= 0 ⇒
κ2 − bαα κ +
b
a= 0 (1–157)

40 Chapter 1 – Preliminaries
In the last statement it has been used thatdet[
bγβ
]
= ba, wherea = det
[
aαγ
]
denotes thedeterminant of the matrix formed by the contravariant components of the surface identity tensor.This relation follows from the identities
bαβ = aαγ bγβ ⇒
det[
bαβ
]
= det[
aαγ
]
det[
bγβ
]
⇒
det[
bγβ
]
=b
a(1–158)
The solutions to (1-157) may be written as
κ1
κ2
= H ∓√
H2 − K (1–159)
where
H =1
2(κ1 + κ2) =
1
2bα
α (1–160)
K = κ1κ2 =b
a= b1
1b22 − b2
1b12 (1–161)
H is called themean curvatureof the surface, andK is theGaussian curvature. As seenKis equal to the determinant of the matrix formed by the mixed componentsbγ
β of the curvaturetensor, and2H is equal to the trace of this matrix. It follows from thatK = 0, if eitherκ1 = 0or κ2 = 0. A surface, where the Gaussian curvature vanishes everywhere is developable, i.e. thesurface can be constructed by transforming a plane without distortion. Conical and cylindricalsyrfaces are developable, whereas a spherical surface in not. From (1-149) and (1-161) follows
B1212 = aK (1–162)
Since, the eigenvectorstα are surface vectors, it follows from (1-116) and (1-153) that t1·a·t2 =t1 · t2 = 0. This means that the principal curvature directions through P areorthogonal to eachother. It is then possible to construct an(s1, s2) arc-length coordinate system at each point onthe surface, which everywhere has the principal curvature eigenvectorst1 andt2 as tangents.This so-calledprincipal curvature coordinate systemis specific in the sense that both[aαβ ] and[bαβ ] become diagonal, i.ea12 = b12 = 0. This is analog to the formulation in modal coordinatesof the equations of motion of linear structural dynamics, where the modal mass and stiffnessmatrices become diagonal, (Nielsen, 2006). In this specificcoordinate system the principalcurvatures are given as
κα =b(α)(α)
a(α)(α)
(1–163)

1.2 Differential Theory of Surfaces 41
Next, various relations are indicated, which involve the partial derivative of the surface unitnormal vectora3 = a3. Partial differentiation of the equationa3 · aα = 0 and use of (1-144)provide
∂a3
∂θβ· aα + a3 ·
∂aα
∂θβ= 0 ⇒
aα · ∂a3
∂θβ= −a3 ·
∂aα
∂θβ= −
3
α β
= −bαβ (1–164)
a3 is a unit vector, soa3 · a3 = 1. Then, partial differentiation provides
a3 ·∂a3
∂θα= 0 (1–165)
Hence, ∂a3
∂θα is orthogonal toa3, and accordingly can be decomposed in the covariant surfacevector baseaβ as follows
∂a3
∂θα= lβα aβ (1–166)
Scalar multiplication of both sides withaγ and use of (1-110) and (1-164) provides the followingsolution for the covariant componentslβα
aγ ·∂a3
∂θα= −bγα = lβα aγ · aβ = aγβ lβα ⇒
lβα = −aβγ bγα = −bβα (1–167)
Then, insertion into (1-166) provides the following alternative representations
∂a3
∂θα=
∂a3
∂θα= −bβ
α aβ = −bαγ aγβ aβ = −bαβ aβ = −
3
α β
aβ (1–168)
where (1-112) and (1-144) have been used. Similarly, (1-118) and (1-144) provide the followingrelation for the partial derivatives of the surface covariant base vectors
∂aα
∂θβ=
γ
α β
aγ + bαβ a3 (1–169)
(1-169) is calledGauss’s formula. Next,eαβ andeαβ are introduced as alternative two-dimensionalpermutation symbols defined as

42 Chapter 1 – Preliminaries
[
eαβ
]
=
[
0 1
−1 0
]
[
eαβ]
=
[
0 −1
1 0
]
(1–170)
As seen[eαβ] = [eαβ ]−1 = [eαβ ]T = −[eαβ ]. From (1-110) follows that
a1 = |a1| = (a1 · a1)1/2 =
√a11
a2 = |a2| = (a2 · a2)1/2 =
√a22
cos ϕ =a1 · a2
|a1||a2|=
a12√a11
√a22
⇒ sin ϕ =
√
1 − a212
a11a22
(1–171)
Then, (1-102) may be written as
A =√
a11
√a22 sin ϕ =
√
a11a22 − (a12)2 =√
a (1–172)
wherea = det[aαβ ]. By the use of (1-170) and (1-172) the vector products in (1-103) can bewritten in the following compact forms
a3 × aα =√
a eαβ aβ
aα × aβ =√
a eαβ a3
(1–173)
Further, the following component identities may be derived
aαβ = a eαγ aγδ eβδ
aαβ =1
aeγα aγδ eδβ
eαβ =1
aaαγ eδγ aδβ
eαβ = a aαγ eδγ aδβ
(1–174)
The first relation in (1-174) follows from the following matrix identities
[
a11 a12
a21 a22
]
=
[
a11 a12
a21 a22
]
−1
= a
[
a22 −a12
−a21 a11
]
= a
[
0 1
−1 0
] [
a11 a12
a21 a22
] [
0 1
−1 0
]T
(1–175)

1.2 Differential Theory of Surfaces 43
where it has been used thatdet[aαβ ] = 1/ det[aαβ ] = 1a. The proof of the remaining relations in
(1-174), which is left an exercise, may be carried out by simple matrix operations on (1-175).
Next, a three-dimensional vector fieldv = v(θ1, θ2) is considered, defined on the parameterdomainω. Hence, a vector is connected to each point of the surfaceΩ. Since,v3 = v3 6= 0, v isnota surface vector. Physically,v may represent a force vector, a moment vector, a displacementvector or a rotation vector related to a material point on thesurface. In this case the followingrepresentations prevail
v = vα aα + v3 a3 = vα aα + v3 a3 (1–176)
Since, ∂v
∂θ3 = 0, the gradient becomes
∇v =∂v
∂θβaβ = vj
;β ajaβ = vj;β ajaβ (1–177)
Similarly, (1-74) becomes
∂v
∂θβ= vj
;β aj = vα;β aα + v3
;β a3
∂v
∂θβ= vj;β aj = vα;β aα + v3;β a3
(1–178)
where, cf. (1-73)
vα;β =
∂vα
∂θβ+
α
β γ
vγ +
α
β 3
v3
v3;β =
∂v3
∂θβ+
3
β γ
vγ +
3
β 3
v3
vα;β =∂vα
∂θβ−
γ
α β
vγ −
3
α β
v3
v3;β =∂v3
∂θβ−
γ
3 β
vγ −
3
3 β
v3
(1–179)
The right hand sides of (1-178) both consist of a surface vector and a vector in the normaldirection. The surface and normal components of these representations must pair-wise be equalcorresponding to
vα;β aα = vα;β aα
v3;β a3 = v3;β a3
⇒
vα;β = aαγ vγ;β
vα;β = aαγ vγ;β
v3;β = v3;β
(1–180)

44 Chapter 1 – Preliminaries
The final relations in (1-180) follow from the initial vectoridentities using (1-112) anda3 = a3.Further,v3 = v3, v3
;β = v3;β,
3
β 3
=
3
3 β
= 0 and
3
β γ
= bβγ , cf. (1-120), (1-144). Then,withdrawal of the second equation in (1-179) from the fourthequation provides the followingrelations for the components of the curvature tensor
−
γ
3 β
vγ =
3
β γ
vγ = bβγvγ ⇒
−
α
3 β
aαγ vγ = bβγ vγ
−
γ
3 β
vγ = bβα aαγ vγ
⇒
bβγ = −
α
3 β
aαγ
b γβ = −
γ
3 β
(1–181)
1.2.3 Codazzi’s equations
From (1-164), (1-168) and (1-169) follows
∂bαβ
∂θγ= − ∂
∂θγ
(
aα · ∂a3
∂θβ
)
= −∂aα
∂θγ· ∂a3
∂θβ− aα · ∂2a3
∂θγ∂θβ=
(
δ
α γ
aδ + bαγ a3
)
· bβε aε − aα · ∂2a3
∂θγ∂θβ= bβδ
δ
α γ
− aα · ∂2a3
∂θγ∂θβ(1–182)
Interchange of the indicesβ andγ in (1-182) provides
∂bαγ
∂θβ= bγδ
δ
α β
− aα · ∂2a3
∂θβ∂θγ(1–183)
Withdrawal of (1-182) from (1-183) gives the relation
∂bαβ
∂θγ− bβδ
δ
α γ
=∂bαγ
∂θβ− bγδ
δ
α β
(1–184)
(1-184) is trivially fulfilled for β = γ. Further, the index combinations(β, γ) = (1, 2) and(β, γ) = (2, 1) lead to the same relation. Hence, merely two non-trivial andindependent rela-tions exist, which are taken corresponding to the index combinations(α, β, γ) = (1, 1, 2) and(α, β, γ) = (2, 2, 1), leading to the following relations

1.2 Differential Theory of Surfaces 45
∂b11
∂θ2− b1δ
δ
1 2
=∂b12
∂θ1− b2δ
δ
1 1
∂b22
∂θ1− b2δ
δ
2 1
=∂b21
∂θ2− b1δ
δ
2 2
(1–185)
The relations (1-185) are calledCodazzi’s equations. It can be shown that arbitrary compo-nent functionsaαβ = aαβ(θ1, θ2) andbαβ = bαβ(θ1, θ2) of the curvilinear parametersθ1 andθ2 uniquely determine a surface (saved an arbitrary rigid bodytranslation and rotation), whichhasaαβ dθαdθβ andbαβ dθαdθβ as its first and second fundamental form, if and only if thesecomponents fulfill the Codazz’s equations (1-185) and the Gauss’s equation (1-165), (Spain,1965).
In a principal curvature coordinate system we havea12 = a21 = 0 andb12 = b21 = 0. In thiscase the Codazzi’s equations can be reduced to
∂
∂θ2
(
a1
R1
)
=1
R2
∂a1
∂θ2
∂
∂θ1
(
a2
R2
)
=1
R1
∂a2
∂θ1
(1–186)
wherea1 anda2 are given by (1-171), andR1 andR2 are the principal curvature radii . A proofof (1-186) has been given in Box 1.2.
Box 1.2: Proof of (1-186)
Sinceb12 = b21 = 0 in the principal curvature coordinate system, (1-185) can be reducedto
∂b11
∂θ2= b11
1
1 2
− b22
2
1 1
∂b22
∂θ1= b22
2
2 1
− b11
1
2 2
(1–187)

46 Chapter 1 – Preliminaries
Next, the Christoffel symbol in (1-187) are expressed in terms of the covariant and con-travariant components of the identity tensor as given by thedefining equation (1-66). Dueto the principal curvature coordinates and the special structure (1-106) these componentsbecomegjk = gjk = 0 for j 6= k, g(α)(α) = a(α)(α) andg(α)(α) = a(α)(α) = 1
a(α)(α). Then
1
1 2
=1
2a11
(
∂a11
∂θ2+ 0 − 0
)
=1
2
1
a11
∂a11
∂θ2
2
1 1
=1
2a22
(
0 + 0 − ∂a11
∂θ2
)
= −1
2
1
a22
∂a11
∂θ2
2
2 1
=1
2a22
(
∂a22
∂θ1+ 0 − 0
)
=1
2
1
a22
∂a22
∂θ1
1
2 2
=1
2a11
(
0 + 0 − ∂a22
∂θ1
)
= −1
2
1
a11
∂a22
∂θ1
(1–188)
Further, from (1-163) follows thatb11 = (1/R1)a11 andb22 = (1/R2)a22. Insertion of(1-188) in (1-187) then provides
∂
∂θ2
(
a11
R1
)
=1
2
(
1
R1
+1
R2
)
∂a11
∂θ2
∂
∂θ1
(
a22
R2
)
=1
2
(
1
R1+
1
R2
)
∂a22
∂θ1
(1–189)
Introduction of(a1)2 = a11 and(a2)
2 = a22 provides the identities
∂
∂θ2
(
a11
R1
)
=∂
∂θ2
(
a1a1
R1
)
=a1
R1
∂a1
∂θ2+ a1
∂
∂θ2
(
a1
R1
)
∂
∂θ1
(
a22
R2
)
=∂
∂θ1
(
a2a2
R2
)
=a2
R2
∂a2
∂θ1+ a2
∂
∂θ1
(
a2
R2
)
∂a11
∂θ2= 2a1
∂a1
∂θ2
∂a22
∂θ1= 2a2
∂a2
∂θ1
(1–190)
Insertion of the results (1-190) into (1-189) immediately provides (1-186).
Example 1.2: Identity tensor, curvature tensor, Riemann-Christoffel tensor and principalcurvatures in spherical coordinates
As seen from (1-93) the contravariant components of the surface identity tensor becomes

1.2 Differential Theory of Surfaces 47
[aαβ ] =
[
r2 0
0 r2 sin2 θ1
]
(1–191)
The contravariant components of the curvature tensor follow from (1-94) and (1-144)
[bαβ ] =
[
−r 0
0 −r sin2 θ1
]
(1–192)
Since both[aαβ and[bαβ] are diagonal, it is concluded that the spherical coordinatesystem is a principal curvaturecoordinate system. The principal curvatures and related principal curvature radii follow from (1-163)
κ1 = κ2 = −1
r⇒
R1 = R2 = −r (1–193)
κ1 andκ2 are negative, because unit surface normal vector is directed away from the curvature center, which inthis case is identical to the origin of the Cartesian coordinate system.The selected independent component of the Riemann-Christoffel tensor becomes, cf. (1-149)
B1212 = r2 sin2 θ1 (1–194)
Left and right hand sides of the Codazzi equations (1-186) vanish in this case. Hence, these equations are triviallyfulfilled.
1.2.4 Surface area elements
Fig. 1–7 Area elements in parallel surfaces.
Fig. 1.7 shows two surfacesΩ andΩ0, described by the same parametersθ1 andθ2. The pointsP0 andP denotes the mapping points for the same parameters, specified by the position vectors

48 Chapter 1 – Preliminaries
r = r(θ1, θ2) andx = x(θ1, θ2), respectively. Further, the unit normal vectors related tothe twosurfaces at the said points are assumed to be identical and equal toa3 = a3. Then, the distancebetween any such corresponding pointsP0 andP on the surfaces are everywhere constant andequal tos3, wheres3 is measured from the surfaceΩ0. On the surfaces arc length coordinatecoordinate systems(s1, s2) and (S1, S2) are introduced with originsP0 andP . The relatedsurface covariant base vectors are denotedaα andgα, respectively. Then, the position vectorsare related as follows
x = r + s3 a3 (1–195)
dA0 denotes a differential area element of shape as a parallelogram with sides of the lengthds1
andds2 parallel toa1 anda2, see Fig. 1.7. The length of the sides follows from (1-117)
ds1 =√
a11 dθ1
ds2 =√
a22 dθ2
(1–196)
Let ϕ denote the angle betweena1 anda2. Then, cf. (1-102), (1-172)
dA0 = ds1ds2 sin ϕ =√
a11
√a22 sin ϕ dθ1dθ2 =
√
a11a22 − (a12)2 dθ1dθ2 =√
a dθ1dθ2 (1–197)
The surface covariant base vectorsgα follows from (1-99), (1-168), (1-195)
gα =∂x
∂θα=
∂r
∂θα+ s3 ∂a3
∂θα= aα − s3bδ
α aδ =(
δδα − s3bδ
α
)
aδ (1–198)
Then, the contravariant componentsgαβ of the surface identity tensor ofΩ becomes
gαβ = gα · gβ =(
δδα − s3bδ
α
) (
δγβ − s3bγ
β
)
aδ · aγ =(
δδα − s3bδ
α
) (
δγβ − s3bγ
β
)
aδγ =
aγδ(
aγα − s3bγα
) (
aδβ − s3bδβ
)
= aγδ(
aαγ − s3bαγ
) (
aβδ − s3bβδ
)
(1–199)
Then, the differential area elementdA onΩ, corresponding todA0 onΩ0, becomes
dA =√
g dθ1dθ2 (1–200)
whereg = det[gαβ ] follows from (1-199)
g = det[
aγδ]
det[
aαγ − s3bαγ
]
det[
aβδ − s3bβδ
]
=1
a
(
det[
aαβ − s3bαβ
]
)2
=
1
a
(
det[
aαγ
]
det[
δγβ − s3bγ
β
]
)2
=
(
det[
aαγ
])2
a
(
det[
δγβ − s3bγ
β
]
)2
=
a(
1 − bααs3 +
b
a
(
s3)2)2
= a(
1 − 2H s3 + K(
s3)2)2
(1–201)

1.3 Continuum Mechanics 49
where (1-157) and (1-158) have been used. Further, the mean curvatureH and the Gaussiancurvature as given by (1-160) and (1-161) have been introduced. Then the ratio between thedifferential area elements become
dA
dA0=
√g√a
= 1 − 2Hs3 + K(s3)2 (1–202)
1.3 Continuum Mechanics
1.3.1 Three-dimensional continuum mechanics
x1
x2
x3
i1
i2
i3
O
X
dXρ0dV0
A0
V0
u(Xk, t)
x(Xk, t)
ρdV
A
Vdx
Fig. 1–8 Referential and current configuration of a flexible body.
Fig. 1-8 shows a flexible body, i.e. a set of connected material points, which at the timet = 0occupies the volumeV0 with the surfaceA0. The indicated configuration of the body is referredto as thereferential configuration. Material points (mass particles) are identified by their po-sition vectorX relative to the origin of a given frame of reference. Although any curvilinearcoordinate system may be used, vectors and tensors will in this and the next subsection exclu-sively be described in the Cartesian(x1, x2, x3)-coordinate system with the originO and thebase unit vectors(i1, i2, i3) shown on Fig. 1-8, with the exception that the dual Cartesianvectorbase(i1, i2, i3) will be used as well. Because the unit base vectors in the indicated vector basesare identical, i.e.ij = ij , covariant, contravariant and mixed Cartesian componentswill beidentical. Since no misapprehension with covariant and contravariant curvilinear coordinates ispossible, the bar atop the Cartesian components of vectors and tensors will be skipped through-out this subsection. The Cartesian componentsXj of X = Xj ij are denoted thematerial orLagrangian coordinatesof the particle. At the timet the body occupies a new volumeV withthe surfaceA due to translation, rotation and mutual distortion of the particles. The indicatedconfiguration is referred to as thecurrent configurationof the body. The position in the cur-rent configuration of a particle with the referential coordinatesXj is defined by the position

50 Chapter 1 – Preliminaries
vectorx(Xk, t) = xj(Xk, t) ij. The current coordinatesxj are known as theEulerian cordi-natesof the particle. Traditionally, the governing equations offluid mechanics are formulatedusing Eulerian coordinates. This permits that large distortions in the continuum motion can behandle with relative ease. By contrast formulations in Lagrangian coordinates is preferred forthe kinematical description in solid mechanics, which allows an easy tracking of the materialhistory. Its weakness lies in its inability to follow large distortions of the computational domain.
Thedisplacementof the particle is defined as the difference between the position vector in thecurrent and referential configurations, see Fig. 1-8
u(Xk, t) = x(xk, t) − X (1–203)
Consider a neighbor particle with the referential positionvectorX+dX. The indicated particleis displaced to the positionx(Xk + dXk, t) = x(Xk, t) + dx(Xk, t), where the incrementalvectors are related as
dx(Xk, t) = F(Xk, t) · dX (1–204)
F = ∇x is the so-calledmaterial deformation gradient, cf. (1-76). This second order tensor, aswell as the transposed tensorFT , the inverse tensorF−1 and the transpose of the inverse tensorF−T have the following dual Cartesian representations, cf. (1-41), (1-47)
F = Fjk ijik =∂xj
∂Xkijik , FT = Fkj ijik =
∂xk
∂Xjijjk
F−1 = F−1jk ijik =
∂Xj
∂xkijik , F−T = F−1
kj ijik =∂Xk
∂xj
ijik
(1–205)
The inverse material deformation gradient presumes the existence of the inverse mappingX =X(xk, t). This requires thatF is non-singular, i.e. that theJacobiandet[Fjk] > 0. Let dV anddV0 denote the volume of a particle in the current and the referential configuration. Further, letρandρ0 be the mass density of the particle in these configurations. Since the mass of the particleis unchanged we must haveρdV = ρ0dV0. The Jacobian specifies the quotient between thedifferential volumes of the particle in the current and referential configurations correspondingto
det[Fjk] =dV
dV0=
ρ0
ρ(1–206)
The distance between the neighboring particles in the referential and the current configurationis given by the lengthsds anddS of the incremental position vectorsdx anddX. Clearly, thedifference between these lengths is a measure of the local distortion of the material. Amongseveral strain measures suitable for description of large strains we shall adopt the so-calledGreen strain tensorE, which is introduced in the following way
ds2 − dS2 = dx · dx − dX · dX = dX ·(
FT · F− g)
· dX = 2 dX · E · dX (1–207)

1.3 Continuum Mechanics 51
where (1-44) and (1-204) have been used.g denotes the identity tensor, which has the follow-ing Cartesian representationg = δjk ijik = δk
j ijik = δjk ijik. δjk = δkj = δjk specify the
Kronecker’s delta (1-14) in various tensor bases. Hence, the Green strain tensor is related to thematerial deformation gradient as follows
E =1
2
(
FT · F− g)
(1–208)
The dual Cartesian components ofE may be expressed in terms of the components of thedisplacement field by (1-203), (1-205) and (1-208)
E = Ejk ijik =1
2
(
Flj ijil · Fmk imik − δjk ijik)
=1
2
(
FljFmkδlm − δjk
)
ijik =
1
2
(
FljFlk − δjk
)
ijik =1
2
(
∂xl
∂Xj
∂xl
∂Xk− δjk
)
ijik =
1
2
(
(
δlj +∂ul
∂Xj
)(
δlk +∂ul
∂Xk
)
− δjk
)
ijik =1
2
(
∂uj
∂Xk+
∂uk
∂Xj+
∂ul
∂Xj
∂ul
∂Xk
)
ijik ⇒
Ejk =1
2
(
∂uj
∂Xk
+∂uk
∂Xj
+∂ul
∂Xj
∂ul
∂Xk
)
(1–209)
For deformation gradients fulfilling| ∂uj
∂Xk| ≪ 1 the quadratic term in (1-209) may be ignored.
The correspondingGreen small strain tensore has the components
ejk =1
2
(
∂uj
∂Xk+
∂uk
∂Xj
)
(1–210)
TheEulerian small strain tensorε represents the corresponding strain tensor, where the defor-mation gradient is taken with the respect to the Eulerian coordinates. This tensor has the dualCartesian components
εjk =1
2
(
∂uj
∂xk+
∂uk
∂xj
)
(1–211)
The Cauchy equations of motion of a mass particle is formulated in Eulerian coordinates. Intensor notation these read, (Malvern, 1969)
ρ a = ∇ · σ + ρb (1–212)
a(xk, t) denotes theacceleration vectorof the particle, andb(xk, t) is theexternal load perunit mass. σ(xk, t) represents theCauchy stress tensor, which is a symmetric tensor,σ = σ
T .The divergence operation∇ · σ specifies a vector with the components∂
∂xl(σjk ijik) · il =
∂σjk
∂xlijik · il = ∂σjk
∂xkij , cf. (1-77). Then, the dual Cartesian component form of (1-212) becomes

52 Chapter 1 – Preliminaries
dA
A1
A2
τ
u
Fig. 1–9 Definition of boundary conditions.
ρ aj =∂
∂xk
σjk + ρ bj (1–213)
Thesurface tractionτ (xk, t) at the current surfaceA is related to Cauchy’s stress tensorσ(xk, t)by Cauchy’s boundary condition, (Malvern, 1969)
τ (xk, t) = σ · n (1–214)
wheren = n(xk, t) signifies the outward directed unit vector to the surfaceA. A is dividedinto two disjoint sub-surfacesA1 andA2, at which eithermechanicalor kinematical boundaryconditionsare prescribed, see Fig. 1-9. Then, (1-212) is solved with the following boundaryconditions
τ (xk, t) = τ (xk, t) , xk ∈ A1
u(xk, t) = u(xk, t) , xk ∈ A2
(1–215)
τ (xk, t) denotes the prescribed surface traction on the sub-surfaceA1, andu(xk, t) is the pre-scribed displacement on the sub-surfaceA2.
As a basis for any finite element method the equations of dynamic equilibrium and relatedboundary conditions are reformulated in a weak form. This isa variational principle for somefunctional of the unknown fields of the problem. At stationarity the varied functional deter-mines the discretized unknown fields, so these fulfil the equilibrium equation and the boundaryconditions ”at best” or ”in average” throughoutV andA, when the fields are varied withina predefined functional sub-space. For so-called displacement based finite element formula-tions, where the only unknown is the displacement field, the relevant variational principle is theprinciple of virtual displacements, which may be formulated as
∫
V
δε ··σ dV =
∫
V
δu · ρ(
b− a)
dV +
∫
A1
δu · τ dA (1–216)
with the component form

1.3 Continuum Mechanics 53
∫
V
δεjk σjk dV =
∫
V
δuj ρ(
bj − aj)
dV +
∫
A1
δuj τ j dA (1–217)
δu(xk) = δuj(xk) ij denotes an arbitrary variational displacement field with the restrictions thatδu(xk) = 0 onA2. Then, (1-217) can be derived by scalar multiplication of both sides (1-213)with δuj(xk), followed by an integration overV . Next, the identity is obtained by the use of thedivergence theorem, the mechanical boundary condition onA1, and the kinematical constrainthat allowable variations fulfillδuj(xk) = 0 on A2. Save that certain continuity requirementsneed to fulfilled to make the indicated mathematical operations meaningful, the variational fieldδu(xk) may else be prescribed with an arbitrary magnitude. Especially, the variations do notnecessarily have any relation to the actual displacement field.
δε = δεjk ijik in (1-216) denotes the Eulerian small strain tensor for the variational displace-ment fieldδu(xk), i.e. the components are given as, cf. (1-211)
δεjk =1
2
(
∂δuj
∂xk
+∂δuk
∂xj
)
(1–218)
Becauseδuj(xk) may be of finite magnitude, this isnot identical to the variation of the com-ponents of the Eulerian small strain tensor of the actual displacement field as given by (1-211).This is so becausexj depends onuj, for which reason the Eulerian gradient∂
∂xkwill be varied
as well. Actually
δ
(
∂uj
∂xk
)
= δ
(
∂uj
∂Xl
∂Xl
∂xk
)
=∂δuj
∂Xl
∂Xl
∂xk
+∂uj
∂Xl
δ
(
∂Xl
∂xk
)
=∂δuj
∂xk
+∂uj
∂Xl
δF−1lk (1–219)
where it has been used that the Lagrangian coordinatesXk are not subjected to any varia-tion, i.e. the variation concerns the displacement of a specific mass particle, for which reasonδ(
∂uj
∂Xk) =
∂δuj
∂Xk. Only for small displacement variations willδ(
∂uj
∂xk) =
∂δuj
∂xk.
Since,δε andσ are symmetric tensors, it follows thatδε ··σ = δε · · σ, cf. (1-59), (1-61).Hence, the same internal virtual work is obtained in (1-216)independent of which definition ofthe double contraction of the involved tensors is used.
Finally, the acceleration vectora enters the volume integral on the right hand side of (1-216) viathe combinationb − a. Formally,b − a may be interpreted as an equivalent quasi-static loadper unit mass, which takes the dynamic effects into consideration via the the so-calledinertialload −a ρdV on the particle. This is the essence of thed’Alembert’s principle. Then, theright hand side of (1-216) represents theexternal virtual workδWe performed by the equivalentload per unit massb − a throughoutV , and the surface tractionτ on A1. The left hand siderepresents theinternal virtual workδWi performed by the internal forces (stress components)on the particles. Then, the principle of virtual displacements postulates that the internal andexternal virtual works are equal, i.e.

54 Chapter 1 – Preliminaries
δWi = δWe (1–220)
The idea is to formulate finite element theories based on the Lagrangian formulation, for whichreason (1-216) at first is reformulated into the following equivalent form based on quantitiesdefined in the referential configuration
∫
V0
δE ··S dV0 =
∫
V0
δu · ρ0
(
b− a)
dV0 +
∫
A01
δu · τ 0 dA0 (1–221)
with the component form
∫
V0
δEjk Sjk dV0 =
∫
V0
δuj ρ0
(
bj − aj)
dV0 +
∫
A01
δuj τ j0 dA0 (1–222)
(b − a) ρdV = (b − a) ρ0dV0 specify the equivalent static load on a given particle, so the firstintegrals on the right hand side of (1-216) and (1-221) denote the summation of these loadsfrom all particles within the structure. Hence, these integrals are equal.
The surfaceA0 in the referential configuration is divided into the sub-surfacesA01 andA02,which are mapped onto theA1 andA2 in the current configuration. Correspondingly, a surfacearea elementdA0 on A01 is mapped onto the surface area elementdA on A1. τ 0 entering thesecond integral on the right hand side of (1-221) denotes a fictitious surface traction definedin the referential configuration, which is related to the actual surface tractionτ in the currentconfiguration as
τ 0dA0 = τdA (1–223)
Then, the second integrals on the right hand side of (1-216) and (1-221) represent the summa-tion of identical loads from corresponding area elements inthe two configuration. It followsthat also these integrals are equal.τ 0 will be referred to as apseudo surface traction, sincethe referential configuration is actually free of any stresses, save for a possible known residualstress configuration with no relation to the indicated external loads and boundary conditions.
As mentioned,δε denotes the Eulerian small strain tensor of the variationaldisplacement fieldδu(xk), and must not be confused with the variation of the Eulerian small strain tensor of theactual displacement field. For this reason it could be anticipated thatδE entering the integral onthe left hand side of (1-221) in the same way represents the Green strain tensor of the variationaldisplacement field. This is not so. Indeed,δE denotes the variation of the finite Green straintensor due to the variation the displacement field, and depends on bothu andδu. In order toderive the relation betweenδE andδε the variation of the material gradient tensor is at firstdetermined. Use of (1-205) provides withδxj = δ(Xj + uj) = δuj

1.3 Continuum Mechanics 55
δF = δ
(
∂xj
∂Xm
)
ijim =∂δxj
∂Xmijim =
∂δuj
∂xk
∂xk
∂Xmijim =
∂δuj
∂xk
∂xl
∂Xmij(δklim) =
∂δuj
∂xk
∂xl
∂Xm
ij(ik · il im) =∂δuj
∂xk
ijik · ∂xl
∂Xm
ilim =∂δuj
∂xk
ijik · F (1–224)
Then, the variation of the Green strain tensor follows from (1-208) and (1-222)
δE =1
2
(
δFT ·F + FT · δF− δg)
= FT · 1
2
(∂δuk
∂xj+
∂δuj
∂xk
)
ijik ·F = FT · δε ·F (1–225)
where it has been used thatδg = ∇g · δu = 0, cf. (1-81). The related component formbecomes, cf. (1-205)
δEjk = δEjk =∂xl
∂Xjδεlm ∂xm
∂Xk(1–226)
The tensor and component form of the inverse relation read
δε = F−T · δE · F−1 (1–227)
δεjk = δεjk =∂Xl
∂xjδElm ∂Xm
∂xk(1–228)
The tensorS entering the integral on the left hand side of (1-221) is another pseudo-stressquantity denoted the second Piola-Kirchhoff stress tensor. This is the virtual work conjugatedstress measure toδE to insure that the left hand sides of (1-216) and (1-221) become identical.This necessitates thatδεjk σjk dV = δElm Slm dV0. Then, use of (1-206) and (1-226) providesthe following relation between the components of the Cauchystress tensor and the componentsof the second Piola-Kirchhoff stress tensor
δεjk σjk dV = δElm Slm dV0 =∂xj
∂Xlδεjk
∂xk
∂XmSlm dV0 ⇒
σjk = σjk =dV0
dV
∂xj
∂Xl
∂xk
∂XmSlm =
ρ
ρ0
∂xj
∂XlSlm ∂xk
∂Xm(1–229)
The related tensor form reads
σ =ρ
ρ0F · S · FT (1–230)
The tensor and component form of the inverse relation read

56 Chapter 1 – Preliminaries
S =ρ0
ρF−1 · σ · F−T (1–231)
Sjk = Sjk =ρ0
ρ
∂Xj
∂xlσlm ∂Xk
∂xm(1–232)
For hyperelastic materialsthe existence of an elastic potentialW (E) is postulated, dependingentirely on the Green strain tensor, from which the components of the second Piola-Kirchhofftensor may be obtained from the gradient relation
Sjk =∂W (E)
∂Ejk(1–233)
For a St.Venant-Kirchhoff type of material the following linear relation betweenS andE ispostulated
S = S0 + C ··E (1–234)
S0 signifies a known residual stress configuration in the referential configuration, which has nodependence on the external loads, the surface traction onA01, or on the prescribed displace-ments onA02. The fourth order tensorC is known as the elasticity tensor. In the first place thishas34 = 81 independent componentsCjklm. However, becauseS = ST andE = ET are bothsymmetric tensors, the following symmetry relations prevail Cjklm = Ckjlm = Cjkml, whichreduces the number of independent components to6 ·6 = 36. Additionally, if the linear materialis hyperelastic, it follows from (1-233) and (1-234) that
Cjklm =∂2W (E)
∂Ejk∂Elm=
∂2W (E)
∂Elm∂Ejk= C lmjk (1–235)
The symmetry condition (1-235) further reduces the number of independent elastic constants to21. In this case the constitutive relation between the 6 non-trivial stress components (due to thesymmetry ofS), and the 6 non-trivial components ofE can be given in the following matrixform
S = S0 + C E (1–236)
S =
S11
S22
S33
S12
S13
S23
, S0 =
S110
S220
S330
S120
S130
S230
, E =
E11
E22
E33
E12
E13
E23
(1–237)

1.3 Continuum Mechanics 57
C =
C1111 C1122 C1133 C1112 C1113 C1123
C1122 C2222 C2233 C2212 C2213 C2223
C1133 C2233 C3333 C3312 C3313 C3323
C1112 C2212 C3312 C1212 C1213 C1223
C1113 C2213 C3313 C1213 C1313 C1323
C1123 C2223 C3323 C1223 C1323 C1313
(1–238)
For anorthotropic materialthe number of material parameters further reduces to 9, correspond-ing to the constitutive matrix
C =
C1111 C1122 C1133 0 0 0
C1122 C2222 C2233 0 0 0
C1133 C2233 C3333 0 0 0
0 0 0 2G12 0 0
0 0 0 0 2G13 0
0 0 0 0 0 2G23
(1–239)
G12, G13 andG23 denotes theshear moduliof the material. Finally, in case of anisotropicmaterialmerely two independent parameters remains. In this case theconstitutive matrix maybe written, (Malvern, 1969)
C =
λ + 2µ λ λ 0 0 0
λ λ + 2µ λ 0 0 0
λ λ λ + 2µ 0 0 0
0 0 0 2µ 0 0
0 0 0 0 2µ 0
0 0 0 0 0 2µ
(1–240)
whereλ andµ are known as theLame parameters. these may be related toYoung’s modulusE,and thePoisson’s ratioas follows, (Malvern, 1969)
λ =ν E
(1 + v)(1 − 2ν), µ = G =
E
2(1 + ν)(1–241)
whereG is the shear modulus. It should be noticed that although the relation (1-236) is physicallinear, the relation becomes geometrical non-linear, whenthe Green tensor is expressed in thedisplacement components.
The use of the variational formulation (1-221) as a basis fora finite element formulation re-quires that the variational fieldδu(X ′
k) and displacement fieldu(X ′
k, t) need to be interpolated

58 Chapter 1 – Preliminaries
between nodal values by means of suitable selected shape function. The shape function for thevariational field must vanish, and the shape function for thedisplacement field must complywith the kinematical boundary conditions onA2.
Fig. 1–10 Shell like structure in referential configuration.
In the present context the bodyV0 in the referential state is either a plate or a shell. Shellstructures have a surface like appearance, since the thickness is considerable smaller than thetwo other dimensions. The geometry of a shell structure is determined by a parameterizedsurface and a thickness function. In this case the surfaceA0 is conveniently divided into threesub-surfacesΩ0 u, Ω0 l andΓ0. Ω0 u andΩ0 l form the upper and lover surfaces of the body,whereasΓ0 makes up the remaining cylindrical part of the boundary.Γ0 is further sub-dividedinto the subsetsΓ0 1 andΓ0 2. Kinematical boundary conditions are only prescribed onΓ0 2.Hence,Γ0 2 is identical to the sub-surfaceA0 2 on Fig. 1-9, whereasA0 1 consists ofΩ0 u, Ω0 l
andΓ0 1. Further, the so-calledmidsurfaceΩ0 has been shown in fig. 1-10, which is an artificialplane in the shell defined as the midst betweenΩ0 u, Ω0 l. Thethicknesst is the distance betweenthe upper and lower surface in the direction of the normal of the midsurface.
Fig. 1–11 Plate and shell surfaces in referential and current state.
The referential position of a material point within the shell is specified by the position vectorX(θ1, θ2, θ3), indicating a vectorial parametric description in terms ofthe curvilinear coordi-

1.3 Continuum Mechanics 59
natesθ1, θ2, θ3. The parametrization in theθ3-direction is centralized in a way that the mid-surface is obtained forθ3 = 0, i.e. the position vector to a particle or material pointP0 of themidsurface is given as
R(θ1, θ2) = X(θ1, θ2, 0) (1–242)
The thicknesst = t(θ1, θ2) related to a point of the midsurface may vary over the surface.For a given valueθ = θ3 a surfaceΩ is defined in the referential state by the position vectorX(θ1, θ2, θ) to a particleP . Especially, the upper and lower surfaces are described by theparametric descriptions
Ru(θ1, θ2) = X
(
θ1, θ2, t(θ1, θ2/2))
Rl(θ1, θ2) = X
(
θ1, θ2, t(θ1,−θ2/2))
(1–243)
At the material pointsP0 andP local arc-length coordinate systems have been defined in boththe referential and the current states. The related covariant and contravariant base vectors in thereferential state are denotedAj andAj, andGj andGj , respectively. The corresponding basevectors in the current state are denotedaj andaj , andgj andgj. The surface covariant basevectors become, cf. (1-99)
Aα = Aα(θ1, θ2) =∂R
∂θα
Gα = Gα(θ1, θ2, θ) =∂X
∂θα
aα = aα(θ1, θ2) =∂r
∂θα
gα = gα(θ1, θ2, θ) =∂x
∂θα
(1–244)
The displacement vector of the particlesP0 andP from the referential state to the current stateare given as, see Fig. 1-11
v(θ1, θ2) = r(θ1, θ2) − R(θ1, θ2)
u(θ1, θ2) = x(θ1, θ2) − X(θ1, θ2)
(1–245)
The idea in shell theory is to relate all vectors and tensors related to a particleP in the currentstate to the covariant or contravariant base vectorsAj andAj of the related particle on themidsurface in the referential state. This will be the subject of section 2.
1.3.2 Fiber-reinforced composite materials
Composite materialsconsist of two or more ingredients with specific mechanical properties.Typically, a composite contains areinforcement material(fibres, steel bars), which are embed-ded into amatrix material(epoxy, cement). The strength and stiffness of the reinforcement

60 Chapter 1 – Preliminaries
Fig. 1–12 Transfer of axial stress in fiber to matrix material.
material are much larger than those of the matrix material, as well as those of the combinedmaterial. The reinforcement material is primarily carrying axial stresses, which are transferredto the matrix material as shear stresses at the interface between the two materials. The basicmechanism can be explained with reference to Fig. 1-12, which shows two cross-sections sep-arated by a distancela of a circular fiber with the radiusr embedded in a surrounding matrixmaterial. At the left section a tensile forceF = σfAf has been applied to the fiber, whereσf isthe axial stress, andAf is the area of the fiber. Over the lengthla, which is denoted theanchorlength, the axial stress drops fromσf to zero as a shear stressτf develops at the interface be-tween the materials. From static equilibrium follows thatτf = − r
2dσf/dx. At the right section
both σf andτf are zero, and a tensile axial stressσm has developed in the matrix material instatic equilibrium withF . Since,σm is distributed to a significantly larger area thanAf , thisstress is correspondingly smaller than the fiber stress at the left cross-section.
Fig. 1–13 Buckling of fiber in axial compression.
During axial compression the fiber may tend to buckle. Whether this happens depends on thecapability of the matrix material in providing lateral elastic support to the fiber as illustrated bytheWinckler foundationmodel shown on Fig. 1-13.
A laminaor ply represents the fundamental building block in alaminate. The fiber reinforce-ment may consist of discontinuous or continuous fibers. These may be unidirectional, bidi-rectional or randomly distributed, or consist of woven fibernets as shown on Fig. 1-14. Aunidirectional fiber arrangement only provides extra strength and stiffness in the direction of

1.3 Continuum Mechanics 61
Fig. 1–14 Fiber arrangements. a) Discontinuous randomly distributed fibres. b) Unidirectional fibers. c) Bi-directional fibers. d) Woven fiber net. (Reddy, 2004).
the alignment. The strength and stiffness of continuously unidirectional fibers are larger thanthat of a corresponding discontinuous fiber arrangement.
x1
x2
x3
θ = 0
θ > 0
θ = 90
θ < 0
Fig. 1–15 Laminate built up of unidirectional laminae with differentfiber orientations. (Reddy, 2004).
A laminate consists of several stacked laminae to achieve the desired stiffness, strength andthickness. In Fig. 1-15 is illustrated how unidirectional fiber reinforced laminae may be stackedto achieved this. The layers are usually bonded together with the same matrix material as thatof the adjacent laminae. Mismatch of the material properties between the layers may producesignificant shear stresses at the interfaces, which in turn may cause delamination. Similarly,mismatch of the fiber and matrix materials may cause debonding of the fibers.
The idea in what follows is to model the lamina as an equivalent smeared out homogeneousorthotropic material, with averaged mechanical properties determined by the constituent mate-rials. In order to derive the material law a so-calledmaterial(x′ 1, x′ 2, x′ 3)-coordinate systemis introduced, with the(x′ 1, x′ 2)-plane placed in the mid-plane of the lamina, and thex′ 1- and

62 Chapter 1 – Preliminaries
x′1
x′2
x′3
Fig. 1–16 Orthotropic lamina. Definition of material coordinate system. (Reddy, 2004).
x′ 2-axes in the direction of the fibers, see Fig. 1-16.
The Piola-Kirchhoff stress componentsS ′ 33 andS ′ 3α in the said coordinate system vanish at theupper and lower surface of the lamina. Then, continuity suggests that these stress componentscan be ignored throughout the lamina. From (1-239) follows that the shear strain componentsE ′
3α of the Green tensor vanish as well. However, the normal strain componentsE ′
33 is non-zeroas seen from the third equation in (1-239)). As an example theisotropic case provides with(1-240)
S ′ 33 = 0 = λ (E ′
11 + E ′
22) + (λ + 2µ) E ′
33 ⇒
E ′
33 = − λ
λ + 2µ(E ′
11 + E ′
22) = − ν
1 − ν(E ′
11 + E ′
22) (1–246)
whereE ′
33 in general is non-vanishing. The axial strain in thex′ 1-direction is given asE ′
11 =S ′
11/E′
1−ν ′
12S′
22/E′
2, whereE ′
1 andE ′
2 denote the Young’s moduli for normal stresses in thex′ 1-andx′ 2-directions, andν ′
12 denotes the Poisson’s ratio for the contraction in thex′ 1-directiondue to an axial strain in thex′ 2-direction. Similarly, the axial strain in thex′
2-direction is givenasE ′
22 = S ′
22/E′
2 − ν ′
21S′
11/E′
1, whereν ′
21 denotes the Poisson’s ratio for the contraction in thex′
2-direction due to an axial strain in thex′
1-direction. For plates and shells shear stressesS ′ 3α
are present in bending deformation, and cannot be disregarded. For this reason these will alsobe included in the constitutive relation for the laminae. Then, the material law for the retainedsecond Piola-Kirchhoff stress and Green strain componentscan be presented by the followingflexibility relation on matrix form
E ′ = D′ S ′ (1–247)
where

1.3 Continuum Mechanics 63
E ′ =
E ′
11
E ′
22
γ′
12
γ′
13
γ′
23
, S ′ =
S ′ 11
S ′ 22
S ′ 12
S ′ 13
S ′ 23
(1–248)
D′ =
1
E ′
1
−ν ′
12
E ′
2
0 0 0
−ν ′
21
E ′
1
1
E ′
2
0 0 0
0 01
G′
12
0 0
0 0 01
G′
13
0
0 0 0 01
G′
23
(1–249)
As seen in (1-248) theangle strainsγ′
12 = 2E ′
12, γ′
13 = 2E ′
13, γ′
23 = 2E ′
23 have been introducedas shear strain measures. The symmetry of the flexibility matrix requires that the Poisson ratiosfulfill
ν ′
12
E ′
2
=ν ′
21
E ′
1
(1–250)
Hence, at most six independent material parameters enter the constitutive law (1-248), (1-249).The inverse stiffness relation reads
S ′ = C ′ E ′ (1–251)
C ′ =
E ′
1
1 − ν ′
12ν′
21
ν ′
12 E ′
1
1 − ν ′
12ν′
21
0 0 0
ν ′
21 E ′
2
1 − ν ′
12ν′
21
E ′
2
1 − ν ′
12ν′
21
0 0 0
0 0 G′
12 0 0
0 0 0 G′
13 0
0 0 0 0 G′
23
(1–252)
In finite element formulations of plate and shell theories the kinematical constraintE ′
33 = 0 isoften presumed, with the consequence that the element thickness is preserved during deforma-tion. This constraint can only be fulfilled if a normal stressS ′ 33 6= 0 is applied to prevent the

64 Chapter 1 – Preliminaries
Poisson contraction as given by (1-245), thus stiffening the configuration. The resulting stiffen-ing effect has been termedthickness lockingor Poisson thickness locking, which is manifestingin an overestimation of the bending stiffness. Despite the obvious contradiction this problem isusually eliminated in finite element analysis by applying the plane stress constitutive equations(1-251), (1-252).
x1
x2
x′3, x3
x′1
x′2 θ
Fig. 1–17 Orthotropic lamina. Material and global coordinate systems. (Reddy, 2004).
Next, the constitutive relations are formulated in a referential (x1, x2, x3)-coordinate systemwith the(x1, x2)-plane coinciding with the(x′ 1, x′ 2)-plane, and with thex3-axis co-directionalto thex′ 3-axis. Further, thex′ 1-axis is rotated the angleθ from thex1-axis in the positivex3-direction, see Fig. 1-17. The base unit vectorsi′j of the material coordinate system are relatedto the base unit vectorsij of the referential coordinate system as
i′j = lkj ik (1–253)
The relation for the corresponding dual base unit vectors iswritten
i′ j = mjk ik (1–254)
lkj andmjk specify the referential coordinates of the base unit vectors i′j andi′ j.With j indicating
a row index, andk a column index, these may be stored in the matrix
[lkj ] = [mjk] =
cos θ − sin θ 0
sin θ cos θ 0
0 0 1
(1–255)
From the tensor representationsS = Sjk ijik = S ′ jk i′ji′
k it follows from (1-253) that the refer-ential and material components of the second Piola-Kirchhoff stress tensor are related as
Sjk = ljl lkm S ′ lm (1–256)
Evaluation of (1-256) provides the following explicit relations

1.3 Continuum Mechanics 65
S11 = cos2 θ S ′ 11 + sin2 θ S ′ 22 − 2 sin θ cos θ S ′ 12
S22 = sin2 θ S ′ 11 + cos2 θ S ′ 22 + 2 sin θ cos θ S ′ 12
S12 = sin θ cos θ S ′ 11 − sin θ cos θ S ′ 22 + (cos2 θ − sin2 θ) S ′ 12
S13 = cos θ S ′ 13 − sin θ S ′ 23
S23 = sin θ S ′ 13 + cos θ S ′ 23
(1–257)
(2-257) may be written in the following matrix form
S = TS(θ) S′ (1–258)
whereS andS ′ are column matrices storing the non-trivial stress components as indicated in(1-248), and the transformation matrixT
S(θ) is given as
TS(θ) =
cos2 θ sin2 θ −2 sin θ cos θ 0 0
sin2 θ cos2 θ 2 sin θ cos θ 0 0
sin θ cos θ − sin θ cos θ cos2 θ − sin2 θ 0 0
0 0 0 cos θ − sin θ
0 0 0 sin θ cos θ
(1–259)
Similarly, the dual tensor representationsE = Ejk ijik = E ′
jk i′ ji′ k provides the followinganalog relation between the referential and material components of the Green tensor
Ejk = mljm
mk E ′
lm (1–260)
Explicit evaluation of (1-260) provides the following relation between the non-trivial strainmeasures on matrix form
E = TE(θ) E ′ (1–261)
whereE andE ′ are column matrices storing the non-trivial stress components a
TE(θ) =
cos2 θ sin2 θ − sin θ cos θ 0 0
sin2 θ cos2 θ sin θ cos θ 0 0
2 sin θ cos θ −2 sin θ cos θ cos2 θ − sin2 θ 0 0
0 0 0 cos θ − sin θ
0 0 0 sin θ cos θ
(1–262)
It can easily be shown thatTS(θ) andT
E(θ) are related as

66 Chapter 1 – Preliminaries
T−1
E(θ) = T T
S(θ) (1–263)
Then,
S = TS(θ) S′ = T
S(θ) C ′ E ′ = T
S(θ) C ′ T−1
E(θ) E = T
S(θ) C ′ T T
S(θ) E (1–264)
From (1-264) is concluded that the components of the elasticity tensor in the two coordinatesystems are related by the following relation on matrix form
C(θ) = TS(θ) C ′ T T
S(θ) (1–265)
C(θ) has the structure
C(θ) =
C1111 C1122 C1112 0 0
C1122 C2222 C2212 0 0
C1112 C2212 C1212 0 0
0 0 0 C1313 C1323
0 0 0 C1323 C2323
(1–266)
Although not indicated, the components in (1-266) can easily be explicitly calculated from (1-252) and (1-259).

1.4 Exercises 67
1.4 Exercises
1.1 Given the following vectorsa, b, c andd. Prove the following vector identities
(a.) a× (b× c) = (a · c)b− (a · b) c
(b.) (a× b) · (c × d) = (a · c)(b · d) − (a · d)(b · c)
(c.) (a× b) · c = (b× c) · a = (c × a) · b
1.2 Prove thee − δ relation (1-19).
1.3 Given the vectorsa, b, c andd with the Cartesian components
[
aj]
=
1
2
3
,[
bj]
=
3
2
1
,[
cj]
=
1
−2
3
,[
dj]
=
3
−2
3
Calculate the dyadic scalar productsab ·· cd andab · · cd.
1.4 Prove the relations (1-37) and (1-40).
1.5 Given the Cartesian componentsCrstu of the elasticity tensorC. Calculate the mixedcurvilinear componentsC k m
j l .
1.6 Prove (1-81) by applying (1-77) to the mixed representationg = δkj gjgk of the identity
tensor.
θ1
θ2
x1
x2
x3
a
a
a) b)
f
1
1
ω
Fig. 1–18 a) Parameter domain. b) Shell surface.
1.7 The mid-surface of a shell structure is defined by the parametric description
x1
x2
x3
=
a θ1
a θ2
2f θ1θ2
where the parameter domainω has been indicated on Fig. 1-18a.a andf are parametersdefining the length and the height of the shell structure as shown on Fig. 1-18b.

68 Chapter 1 – Preliminaries
(a.) Calculate the covariant and contravariant base vectorsgj andgj in terms of the Carte-sian base vectors.
(b.) Calculate the contravariant components of the surface identity tensor and the cur-vature tensor, and determine principal curvature, the meancurvature, the Gaussiancurvature and the principal curvature directions.
(c.) Formulate Codazzi’s equations for the surface in terms of the selected curvilinearcoordinates.
1.8 Prove the last three relations in (1-74).
1.9 Derive (1-217) from (1-213).

CHAPTER 2Shell and Plate Theories
The history of plate theories started with Jacob II Bernoulli, who formulated a grid model ofoverlapping beams, where the torsional mode was neglected.The differential equations of aplate were derived independently by Lagrange, Poisson and Navier. However, their theoriesall had flaws with respect to the elastic constants and the boundary conditions. These prob-lems were finally solved by Kirchhoff, (Kirchhoff, 1850), for which reason he is considered thefounder of modern plate theory. It took almost a century before E. Reissner, (Reissner, 1944)and (Reissner, 1945), and Mindlin (Mindlin, 1951), extended the model to include transverseshear deformations, in much the same way as Timoshenko included shear deformation in theBernoulli-Euler beam theory.
Dealing with the eigenvibrations of a bell, Euler in 1764 developed the first mathematical modelto shell theory by analyzing the axisymmetric bell structure as independent ring beams, ignoringthe torsional and meridional bending effects. Again, a century passed before a consistent theorywas derived by Love, (Love, 1888). It is based on Kirchhoff’smethod, and thus are referredto as the Kirchhoff-Love model. The inclusion of transverseshear deformations, although pro-posed by Naghdi, (Naghdi, 1972), is today mostly referred toas the Reisnner-Mindlin model,in recognition of their analog contributions to plate theory.
The list of names contributing to plate and shell theory in the twentieth century is very long.Hardly any other area of structural mechanics has produced so many publications, which ispartly an indication of the complexity of the involved mechanics, and partly of the practicalrelevance of the subject. While the initial interest in plate and shell theory grew from the needof solutions to problems in civil and architectural engineering, the focus has gradually changedto a wider scale of applications in mechanical engineering,aerospace and vehicle industry andbiomechanics, which has been the driving force for further developments. Subjects as largedisplacements (e.g. v. Karman plate theory), finite rotations, buckling, composites, anisotropicmaterials, material nonlinearities and higher order plateand shell theories have been investi-gated. Central in these developments has been the concurrent development of numerical meth-ods based on the finite element methods. In turn the numericalmodeling has also changed thestandard mechanical model for plate and shell elements froma Kirchhoff-Love to a Reissner-Mindlin kinematical formulation, motivated by the reducedcompatibility requirements of theelement shape functions.
— 69 —

70 Chapter 2 – Shell and Plate Theories
When applying a finite element method to plates and shell it isimportant to realize that errorson the numerical predictions stem from two sources, namelymodeling errorsintrinsic to theapplied plate or shell theory, anddiscretization errorscaused by the numerical analysis of thistheory by a finite-degrees-of-freedom model.
Modeling errors are caused by certain approximations applied to the three-dimensional con-tinuum in terms of specific kinematic constraint on the motion of the mass particles, resultingin Love-Kirchhoff, Reissner-Mindlin or even higher order theories. Additionally, decisions onthe inclusion or exclusion of material and geometrical non-linearities, of anisotropy and non-homogeneity will influence the qualities of the theory. While the discretization errors can beremoved by mesh refinement, the modeling errors always persist.
When developing and applying a finite element formulation the aim is to achieve a certain ac-curacy of the numerical prediction relative to the theoretical model, using a minimum numberof degrees of freedom. This rises a number of questions, which have to be answered in ad-vance. Should one start from a genuine shell theory, or should the plate and shell elements bederived as degenerated continuum elements. Should the two-dimensional elements be derivedfrom a variational formulation of the a genuine plate or shell theory, or should the dimensionalreduction be achieved via degenerated three-dimensional continuum elements. Further, whichsimplifications in the formulation are admissible, and in which applications.
The aim of the following outline is to provide an overview of the mathematical formulation ofthe theory for thin-walled based on the finite element formulation. It is not the intention to goin into depth with these theories, which consequently will be given in a somewhat descriptivemanner. However, we do need to define some fundamental concepts precisely.
Since, non-linear plates turn into shells after the first load increment has been applied the focusis from the start on shells.
The formulations aim at the largest possible generality. Both thin and thick shells are cov-ered. The shell structure may be layered (sandwich or laminar structures), anisotropic or non-homogeneous.
Only static problems will be covered. Further, the non-linear behavior is assumed to be ofgeometric nature. The extension to dynamic problems or material non-linearities are possi-ble without fundamental difficulties. In the first case a massand damping matrix need to beincluded. In the last case the incremental elastic stiffness matrix need to be modified.

2.1 Plates and Shells 71
2.1 Plates and Shells
Fig. 2–1 Bending and membrane deformation modes of axis-symmetric shells.
The structural behavior of the shell is characterized by twoprincipal different modes of de-formations, namely membrane and bending deformations. Fig. 2-1 shows some illustrativeexamples for axis-symmetric shells, which have been chosenmerely because the actions areeasily illustrated in this case. The bending deformation typically causes an ovalization of theshell. Correspondingly, the cross-section is exposed to a linearly varying normal stress over thesection with the zero line placed at the midsurface. In contrast, membrane dominated deforma-tions induce normal stresses in the section, which are approximately constant over the thickness.
Obviously, the membrane state is the desirable mode of deformation. If this can be established,the shell may carry very large external loads compared to itsself-weight.
If the external load varies significantly, or the supports are inappropriately designed, bendingdeformations may arise. These deformations and related stresses are considerably larger thanthose caused by the same loads in case of membrane action. if amembrane state

72 Chapter 2 – Shell and Plate Theories
Fig. 2–2 Strain energy fractions in bending for clamped hemisphere shell
Fig. 2–3 xxxxx

2.2 Exercises 73
2.2 Exercises
2.1 Given the following vectorsa, b, c andd. Prove the following vector identities
(a.) a× (b× c) = (a · c)b− (a · b) c
(b.) (a× b) · (c × d) = (a · c)(b · d) − (a · d)(b · c)
(c.) (a× b) · c = (b× c) · a = (c × a) · b

Index
principal curvature direction, 39
acceleration vector, 51anchor length, 60angle strain, 63arc length coordinates, 8, 9, 48azimuth angle, 7, 28
base unit vectors, 9, 49, 64
Cartesian tensor components, 14Cartesian vector components, 11Cauchy stress tensor, 51Cauchy’s boundary condition, 52characteristic equation, 39Christoffel symbol, 19Codazzi’s equations, 45composite material, 59contraction, 13contravariant base vector, 10, 12contravariant tensor components, 14contravariant vector base, 10contravariant vector components, 11covariant base vector, 9, 12, 29covariant derivative, 21covariant tensor components, 14covariant vector base, 9covariant vector components, 11current configuration, 49curvature, 36curvature center, 36curvature tensor, 38curvature vector, 36curvilinear coordinates, 8, 59
d’Alembert’s principle, 53discretization error, 70displacement, 50
double contraction, 13, 17, 53dual vector base, 10dyad, 13
e-delta relation, 11, 67elasticity tensor, 17, 18, 56Eulerian coordinates, 50Eulerian small strain tensor, 51, 53external load per unit mass, 51external virtual work, 53
first fundamental form, 32flat space, 25fourth order tensor, 17Frenet’s formula, 36fundamental tensor, 16
Gauss’s equation, 38, 45Gauss’s formula, 41Gaussian curvature, 40, 49geodesic curvature, 37gradient of scalar, 19gradient of tensor, 22gradient of vector, 19, 43Green small strain tensor, 51Green strain tensor, 17, 50
hyperelastic material, 56
identity tensor, 15, 18, 23, 30inertial load, 53internal virtual work, 53inverse tensor, 16, 50isotropic material, 57
Jacobian, 8, 50
kinematical boundary condition, 52Kronecker’s delta, 10, 11, 15, 31, 51
74

INDEX 75
Lagrangian coordinates, 49Lame parameters, 57lamina, 60laminate, 60
material coordinate system, 61material coordinates, 49material deformation gradient, 50matrix material, 59mean curvature, 40, 49mechanical boundary condition, 52metric tensor, 16midsurface, 58mixed covariant and contravariant component,
14modeling error, 70
normal curvature, 37, 39
orthotropic material, 57outer product, 13
permutation symbol, 11physical linear material, 17ply, 60Poisson’s ratio, 57, 62polyad, 13principal curvature, 39, 47principal curvature coordinate system, 40, 45,
47principal normal vector, 36principle of virtual displacement, 52, 53pseudo surface traction, 54
radial distance, 7radius of curvature, 35, 36, 45, 47Rayleigh quotient, 38referential configuration, 49regular point, 8reinforcement material, 59Riemann-Christoffel tensor, 23, 24, 27, 34, 47
second fundamental form, 38second order tensor, 12, 19second Piola-Kirchhoff stress tensor, 17, 55shear modulus, 57singular point, 8spherical coordinate system, 7, 25summation convention, 9surface contravariant derivative, 33
surface covariant derivative, 33surface identity tensor, 32, 46surface metric tensor, 32surface Riemann-Christoffel tensor, 34, 38surface second order tensor, 31, 33surface traction, 52surface vector, 30symmetric tensor, 15
tensor base, 14tensor product, 13tetrad, 13thickness, 58thickness locking, 64thickness Poisson locking, 64third order tensor, 22, 33transposed tensor, 15, 50triad, 13
unit normal vector, 30, 41unit tangent vector, 9, 35
vector, 19
Winckler foundation, 60
Young’s modulus, 57, 62
zenith angle, 7, 28

76 INDEX

Bibliography
Kirchhoff, G. (1850). Uber das gleichgewicht und die bewegung einer elastischen scheibe.J. ReineAngew. Math., 40:51–58.
Love, A. (1888). On the small vibrations and deformations ofthin elastic shells.Philos. Trans. R. Soc.,179:491.
Malvern, L. (1969).Introduction to the Mechanics of a Continous Medium.Printice-Hall.
Mindlin, R. (1951). Influence of rotatory inertia and shear flexural motions of isotropic elastic plates.J.Appl. Mech., 18:31–38.
Naghdi, P. (1972).The Theory of Shells.In: Handbuch der Physik,Vol. VI/2, Flugge, S. (ed.). SpringerVerlag.
Nielsen, S. (2006).Structural Dynamics, Vol. 1. Linear Structural Dynamics, 4th Ed.Aalborg TekniskeUniversitetsforlag.
Reddy, J. (2004).Mechanics of Laminated Composite Plates and Shells. Theoryand Analysis.CRCPress.
Reissner, E. (1944). On the theory of bending of elastic plates.J. Math. Phys., 23:184–191.
Reissner, E. (1945). The effect of transverse shear deformation on the bending of elastic plates.J. Appl.Mech., 12:69–76.
Spain, B. (1965).Tensor Calculus.Oliver and Boyd.
Synge, J. and Schild, A. (1966).Tensor Calculus.University of Toronto Press.
Zill, D. and Cullen, M. (2005).Differential Equations with Boundary-Value Problems, 6thEd. Brooks-Cole.
— 77 —