PHYS 251 HONOURS CLASSICAL MECHANICS 2014 Homework Set …rhb/ph251/CMsol6d.pdf · PHYS 251 HONOURS...
5
PHYS 251 HONOURS CLASSICAL MECHANICS 2014 Homework Set 6 Solutions 6.25. Spring on a T Let the ‘-rod be horizontal (parallel to the x axis) at t = 0. Then, as it rotates with constant angular frequency ω, its angle with respect to the x axis will be ωt. Thus, we can write the coordinates of the mass as follows: x = ‘ cos(ωt) - r sin(ωt) , (1) y = ‘ sin(ωt)+ r cos(ωt) , (2) and so the velocity of the mass is given by ˙ x = ω[-‘ sin(ωt) - r cos(ωt)] - ˙ r sin(ωt) , (3) ˙ y = ω[‘ cos(ωt) - r sin(ωt)] + ˙ r cos(ωt) . (4) So after simplification, v 2 =˙ x 2 +˙ y 2 = ω 2 (‘ 2 + r 2 )+˙ r 2 +2ω‘ ˙ r. (5) We can then write the Lagrangian: L = T - V = 1 2 mv 2 - 1 2 kr 2 = 1 2 m ω 2 (‘ 2 + r 2 )+˙ r 2 +2ω‘ ˙ r - 1 2 kr 2 . (6) Applying the Euler-Lagrange equation, we find ∂L ∂r - d dt ∂L ∂ ˙ r =0 (7) = ⇒ m¨ r = mω 2 r - kr (8) = ⇒ ¨ r + k m - ω 2 r =0 . (9) We recognize this last equation as the equation of motion of a simple harmonic oscillator. There are three different cases, which yield different solutions: 1. If ω< p k/m, then the solution is r(t)= A cos(˜ ωt)+ B sin(˜ ωt), where A and B are constants which depend on the initial conditions. Note that we defined ˜ ω = q k m - ω 2 . 2. If ω> p k/m, then the solution is r(t)= Ae ˜ ωt + Be -˜ ωt , where this time we define ˜ ω = q ω 2 - k m . A and B are still constants of integration. 3. If ω = p k/m, then the solution is simply r(t)= At + B. The special value of ω is p k/m. When it is larger than this value, the centrifugal force in the rotating frame is dominant over the spring force so r grows exponentially. For an angular velocity smaller than p k/m, then the usual oscillator motion is dominant. 1
-
Upload
nguyenlien -
Category
Documents
-
view
217 -
download
0
Transcript of PHYS 251 HONOURS CLASSICAL MECHANICS 2014 Homework Set …rhb/ph251/CMsol6d.pdf · PHYS 251 HONOURS...

PHYS 251 HONOURS CLASSICAL MECHANICS 2014
Homework Set 6 Solutions
6.25. Spring on a T
Let the `-rod be horizontal (parallel to the x axis) at t = 0. Then, as it rotates with constant angular frequencyω, its angle with respect to the x axis will be ωt. Thus, we can write the coordinates of the mass as follows:
x = ` cos(ωt)− r sin(ωt) , (1)
y = ` sin(ωt) + r cos(ωt) , (2)
and so the velocity of the mass is given by
x = ω[−` sin(ωt)− r cos(ωt)]− r sin(ωt) , (3)
y = ω[` cos(ωt)− r sin(ωt)] + r cos(ωt) . (4)
So after simplification,v2 = x2 + y2 = ω2(`2 + r2) + r2 + 2ω`r . (5)
We can then write the Lagrangian:
L = T − V =1
2mv2 − 1
2kr2 =
1
2m[ω2(`2 + r2) + r2 + 2ω`r
]− 1
2kr2 . (6)
Applying the Euler-Lagrange equation, we find
∂L
∂r− d
dt
(∂L
∂r
)= 0 (7)
=⇒ mr = mω2r − kr (8)
=⇒ r +
(k
m− ω2
)r = 0 . (9)
We recognize this last equation as the equation of motion of a simple harmonic oscillator. There are threedifferent cases, which yield different solutions:
1. If ω <√k/m, then the solution is r(t) = A cos(ωt) + B sin(ωt), where A and B are constants which
depend on the initial conditions. Note that we defined ω =√
km − ω2.
2. If ω >√k/m, then the solution is r(t) = Aeωt +Be−ωt, where this time we define ω =
√ω2 − k
m . A and
B are still constants of integration.
3. If ω =√k/m, then the solution is simply r(t) = At+B.
The special value of ω is√k/m. When it is larger than this value, the centrifugal force in the rotating frame
is dominant over the spring force so r grows exponentially. For an angular velocity smaller than√k/m, then
the usual oscillator motion is dominant.
1

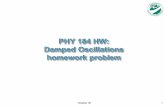
Figure 1: Maple code for Problem 6.27. Note that e is some small time interval and that i is some iterationvariable.
6.27. Coffee cup and mass
The kinetic energy of the coffee cup is simply 12Mr2. Since the mass m can also rotate, its kinetic energy is
12mr
2 + 12mr
2θ2. Their potential energy is then Mgr and −mgr sin θ, respectively. Therefore, the Lagrangianis
L = T − V =1
2Mr2 +
1
2mr2 +
1
2mr2θ2 −Mgr +mgr sin θ , (10)
and the equations of motion are
∂L
∂r− d
dt
(∂L
∂r
)= 0 (11)
=⇒ (M +m)r = mrθ2 −Mg +mg sin θ (12)
and
∂L
∂θ− d
dt
(∂L
∂θ
)= 0 (13)
=⇒ rθ = −2rθ + g cos θ . (14)
For the second part, see Figure 1 for an example of code written in Maple. We find the ratio of the r atthe lowest point to the r at the start to be ≈ 0.2076 for m/M = 1/10. We also find that this lowest point isattained after a time of ≈ 0.4831 s, and that the angle θ at that moment is ≈ 5.3488 rad.
6.34. x dependence
With a x dependent term in the Lagrangian, Eq. (6.19) becomes
∂
∂aS[xa(t)] =
∫ t2
t1
(∂L
∂xaβ +
∂L
∂xaβ +
∂L
∂xaβ
)dt (15)
We then integrate the last term by parts twice:∫∂L
∂xaβ dt =
∂L
∂xaβ −
∫d
dt
(∂L
∂xa
)β dt (16)
=∂L
∂xaβ −
[d
dt
(∂L
∂xa
)β −
∫d2
dt2
(∂L
∂xa
)β dt
]. (17)
2

Therefore, we obtain
∂S[xa(t)]
∂a=
∫ t2
t1
β
[∂L
∂xa− d
dt
(∂L
∂xa
)+d2
dt2
(∂L
∂xa
)]dt+ β
[∂L
∂xa− d
dt
(∂L
∂xa
)]t2ti
+∂L
∂xaβ
∣∣∣∣t2t1
. (18)
The boundary term proportional to β is equal to 0, since we assume that β vanishes at the endpoints. However,the boundary proportional to β may not be zero, since we do not assume that the derivative is zero at theendpoints. Therefore, the proposed result is not valid.
6.38. Constraint on a curve
The Lagrangian is L = 12m(x2 + y2)− V (r) where we denote r to be the distance of the bead from the curve.
Then,
∂L
∂x− d
dt
(∂L
∂x
)= 0 =⇒ mx = −∂V (r(x, y))
∂x= −∂V
∂r
∂r
∂x, (19)
∂L
∂y− d
dt
(∂L
∂y
)= 0 =⇒ my = −∂V (r(x, y))
∂y= −∂V
∂r
∂r
∂y, (20)
where we note that F (r) = −∂V∂r , so
mx = F (r)∂r
∂xand my = F (r)
∂r
∂y. (21)
We are told that the curve is described by a function y = f(x), so we have
y =df(x(t))
dt= f ′x =⇒ y = f ′x+ f ′′x2 , (22)
where ′ denotes a derivative with respect to x. Substituting (21) into (22), we obtain
F
m
∂r
∂y= f ′
F
m
∂r
∂x+ f ′′x2 (23)
=⇒ F =mf ′′x2
∂r∂y − f ′
∂r∂x
. (24)
Now, to determine the partial derivatives of r with respect to x and y, let θ be the angle between the curve andthe x axis at any time. Then, the tangent to the curve at any point on the x axis is simply
f ′(x) = tan θ . (25)
With the same geometrical description, a bead a distance r from the curve will have
∂r
∂x= − sin θ and
∂r
∂y= cos θ . (26)
Using (25), sin and cos can be re-written in terms of f ′, so one obtains
∂r
∂x= − f ′√
1 + f ′2and
∂r
∂y=
1√1 + f ′2
. (27)
Therefore, the expression for the force found in (24) becomes
F =mf ′′x2√1 + f ′2
, (28)
but we note that since v = xx + yy, we have x = v cos θ = v√1+f ′2
, so in the end
F =mf ′′v2
(1 + f ′2)3/2. (29)
3

6.40. Atwood’s machine
By conservation of string, the height of the 4m mass is −x+y2 , so the Lagrangian is simply
L =T − V =1
2(4m)
(x+ y
2
)2
+1
2(5m)x2 +
1
2(3m)y2 −
[−(4m)g
(x+ y
2
)+ (5m)gx+ (3m)gy
](30)
=m(3x2 +mxy + 2my2)−mg(3x+ y) . (31)
We note that under the transformation
x→ x+ ε , (32)
y → y − 3ε , (33)
the Lagrangian is left invariant (L→ L). Therefore, we can use Noether’s theorem with
Kx = 1 and Ky = −3 , (34)
and the conserved momentum is thus
P =∂L
∂xKx +
∂L
∂yKy = m(6x+ y)− 3m(x+ yy) = m(3x− 11y) , (35)
which tells us that m(3x− 11y) = constant all the times in this system.
6.42. Spring on a spoke
Let (x, y) be the coordinates of the mass relative to the center of the wheel at t = 0. Also, let r be the lengthof the spring and θ be the angle through which the wheel has rolled relative to the position where the spring isvertical. Then,
x = Rθ − r sin θ and y = R− r cos θ , (36)
so
x = Rθ − rθ cos θ − r sin θ and y = rθ sin θ − r cos θ (37)
=⇒ v2 = x2 + y2 = R2θ2 + r2θ2 + r2 − 2rRθ2 cos θ − 2rRθ sin θ . (38)
We assume that θ, θ, r � 1, so the velocity becomes
v2 = R2θ2 + r2θ2 + r2 − 2rRθ2(
1− θ2
2+O(θ4)
)− 2rRθ
(θ − θ3
6+O(θ5)
)(39)
= R2θ2 + r2θ2 + r2 − 2rRθ2 , (40)
where the second equality is valid up to second order in small quantities. The Lagrangian is then
L = T − V =1
2m(R2θ2 + r2θ2 + r2 − 2rRθ2)− 1
2kr2 +mgr cos θ . (41)
So,
∂L
∂θ− d
dt
(∂L
∂θ
)= 0 (42)
=⇒ md
dt
[(R− r)2θ
]= −mgr sin θ (43)
=⇒ (R− r)2θ − 2(R− r)rθ = −gr sin θ . (44)
To first order in small quantities, this EOM simplifies to become
(R− r)2θ = −grθ . (45)
For small oscillations, r � 1 =⇒ r ≈ 0 =⇒ r ≈ constant. Thus, we have a simple harmonic oscillator,
θ + ω2θθ = 0 , (46)
4

with ω2θ ≡
gr(R−r)2 . Also, we have
∂L
∂r− d
dt
(∂L
∂r
)= 0 (47)
=⇒ d
dt(mr) = m(r −R)θ2 − kr +mg cos θ (48)
=⇒ r = −krm
+ g , (49)
up to first order in small quantities. This EOM can be re-written as follows:
ρ+ ω2rρ = 0 , (50)
with ρ ≡ r − mgk and ω2
r ≡ km . From this, we read the equilibrium value of r to be when ρ = 0, i.e. when
r =mg
k≡ req . (51)
Thus, we can re-write ωr =√g/req. Finally, the two frequencies are equal when
ωθ = ωr =⇒√greq
R− req=
√g
req=⇒ req =
R
2. (52)
5