Performance Analysis of Single Phase Induction Motor … the total number of stator series turns in...
6
Performance Analysis of Single Phase Induction Motor and Switched Reluctance Motor used in Domestic Appliances with a view of Energy Conservation Asok kumar A. Dept. of Electrical Engineering College of Engineering Trivandrum Kerala, India G. R. Bindu Dept. of Electrical Engineering College of Engineering Trivandrum Kerala, India Dinesh Gopinath Dept. of Electrical Engineering College of Engineering Trivandrum Kerala, India Abstract— The advent of inexpensive power semiconductors and digital control platforms has generated an interest in machines like switched reluctance motor (SRM) which is known for its structural simplicity. In domestic sector, however, conventional type of single phase induction motor (SPIM) is still commonly used. Most domestic appliances use fractional kilowatt motors with ratings ranging from 200 W to 800 W. This paper investigates the performance of SRM for use in a domestic application as in a water lifting pump and compares with SPIM, which is being used presently. The analysis combines the versatility of Finite Element Method with the classical design procedures. It is clear from the results that SRM gives better performance, energy saving and is cost effective as compared to the present machine and hence is a better alternative for domestic applications, in view of energy conservation. Keywords— Switched Reluctance motor; Power Factor Corrected; Power Convertors; Finite Element Method I. INTRODUCTION Electrical energy is the most usable form of energy in applications ranging from domestic to industrial. Domestic appliances employing electrical energy are becoming more and more common, which demands increased efficiency and improved functionality. Commonly used home appliances such as mixer-grinders/ food processors/ pumps are low- technology products which are sold in a large volume. Hence efficiency improvement of the products in this area results in large overall national savings of energy, which is extremely important in the present scenario of energy shortage. In domestic applications and in agriculture, water lifting is one of the major areas, where electric power is used. Presently, Single Phase Induction Motors (SPIM) are commonly used for such applications. But these machines consume more power, has lesser efficiency and on the whole, power wastage is more. The SRM has higher efficiency and less losses compared to SPIM [1]. However, it cannot run directly from a dc bus or an ac line and requires a power controller that is designed for the specific application. Efficiency improvement in the SRM drives depends on the converter in addition to the motor. The maximum efficiency in single pulse controlled SRM drive is explored in [2]. Performance and functional improvements on the other hand depending on the control method and its implementation with converter is explained in [3]. The design optimization is very important in the effective utilization of any electrical machines, in particular the SRM drives. A technique to optimize the performance of SRM drives is presented in [4]. In most applications, SRMs are used with simultaneous excitation of more than one phases. Thus, a model accounting for mutual coupling in the presence of magnetic saturation is needed to predict and optimize their performance in terms of efficiency and torque ripple. A comprehensive review of SRM technology including modeling, design, analysis and control has been discussed, and the optimal control strategy of four phase power convertor with single pulse mode for the SRM is also briefly mentioned in [5]. Some of the problems for the SRM are Electro Magnetic Interference (EMI) generation from dc link, unregulated dc link voltage, motor vibration and acoustic noise. The work in [6] presented the development of SRM drive with "Power Factor Corrected (PFC)" front-end, which has efficiently reduced the above problem and improved the performance of the motor. However, the major disadvantage of the SRM is the non-uniform torque characteristics. The work reported in [7] presented a dynamic two phase excitation method. There are several researchers working in the area of improvement of single-phase induction motor also. A new scheme for speed control of Capacitor-run single phase induction motor with improved energy saving scheme is introduced in [9]. The design and fabrication of single phase capacitor run induction motor in an optimized manner using Perturb and Observe method to enhance the efficiency of existing design is discussed in [10]. The remainder of this paper is organized in six sections. Section II contains a description of design considerations and the specifications along with the physical dimensions of a Single Phase Induction Motor. In section III, the theory and design considerations of Switched Reluctance Motor are discussed. Along with this, the function of convertors and the 978-1-4799-2993-1/14/$31.00 ©2014 IEEE
-
Upload
hoanghuong -
Category
Documents
-
view
215 -
download
2
Transcript of Performance Analysis of Single Phase Induction Motor … the total number of stator series turns in...

Performance Analysis of Single Phase Induction Motor and Switched Reluctance Motor used in
Domestic Appliances with a view of Energy Conservation
Asok kumar A.
Dept. of Electrical Engineering College of Engineering Trivandrum
Kerala, India
G. R. Bindu Dept. of Electrical Engineering
College of Engineering Trivandrum Kerala, India
Dinesh Gopinath Dept. of Electrical Engineering
College of Engineering Trivandrum Kerala, India
Abstract— The advent of inexpensive power semiconductors and digital control platforms has generated an interest in machines like switched reluctance motor (SRM) which is known for its structural simplicity. In domestic sector, however, conventional type of single phase induction motor (SPIM) is still commonly used. Most domestic appliances use fractional kilowatt motors with ratings ranging from 200 W to 800 W. This paper investigates the performance of SRM for use in a domestic application as in a water lifting pump and compares with SPIM, which is being used presently. The analysis combines the versatility of Finite Element Method with the classical design procedures. It is clear from the results that SRM gives better performance, energy saving and is cost effective as compared to the present machine and hence is a better alternative for domestic applications, in view of energy conservation.
Keywords— Switched Reluctance motor; Power Factor Corrected; Power Convertors; Finite Element Method
I. INTRODUCTION Electrical energy is the most usable form of energy in applications ranging from domestic to industrial. Domestic appliances employing electrical energy are becoming more and more common, which demands increased efficiency and improved functionality. Commonly used home appliances such as mixer-grinders/ food processors/ pumps are low-technology products which are sold in a large volume. Hence efficiency improvement of the products in this area results in large overall national savings of energy, which is extremely important in the present scenario of energy shortage. In domestic applications and in agriculture, water lifting is one of the major areas, where electric power is used. Presently, Single Phase Induction Motors (SPIM) are commonly used for such applications. But these machines consume more power, has lesser efficiency and on the whole, power wastage is more. The SRM has higher efficiency and less losses compared to SPIM [1]. However, it cannot run directly from a dc bus or an ac line and requires a power controller that is designed for the specific application. Efficiency improvement in the SRM drives depends on the converter in addition to the motor. The
maximum efficiency in single pulse controlled SRM drive is explored in [2]. Performance and functional improvements on the other hand depending on the control method and its implementation with converter is explained in [3]. The design optimization is very important in the effective utilization of any electrical machines, in particular the SRM drives. A technique to optimize the performance of SRM drives is presented in [4]. In most applications, SRMs are used with simultaneous excitation of more than one phases. Thus, a model accounting for mutual coupling in the presence of magnetic saturation is needed to predict and optimize their performance in terms of efficiency and torque ripple. A comprehensive review of SRM technology including modeling, design, analysis and control has been discussed, and the optimal control strategy of four phase power convertor with single pulse mode for the SRM is also briefly mentioned in [5]. Some of the problems for the SRM are Electro Magnetic Interference (EMI) generation from dc link, unregulated dc link voltage, motor vibration and acoustic noise. The work in [6] presented the development of SRM drive with "Power Factor Corrected (PFC)" front-end, which has efficiently reduced the above problem and improved the performance of the motor. However, the major disadvantage of the SRM is the non-uniform torque characteristics. The work reported in [7] presented a dynamic two phase excitation method. There are several researchers working in the area of improvement of single-phase induction motor also. A new scheme for speed control of Capacitor-run single phase induction motor with improved energy saving scheme is introduced in [9]. The design and fabrication of single phase capacitor run induction motor in an optimized manner using Perturb and Observe method to enhance the efficiency of existing design is discussed in [10].
The remainder of this paper is organized in six sections. Section II contains a description of design considerations and the specifications along with the physical dimensions of a Single Phase Induction Motor. In section III, the theory and design considerations of Switched Reluctance Motor are discussed. Along with this, the function of convertors and the
978-1-4799-2993-1/14/$31.00 ©2014 IEEE

type of convertor used in this Switched Reluctance Motor is also discussed. Analysis of the performance characteristics of Single Phase Induction Motor and Switched Reluctance Motor are discussed in Section IV. Section V presents the discussion of results in these two types of motors using Maxwell software. Finally, Section VI presents the conclusions.
II. SINGLE PHASE INDUCTION MOTOR (SPIM) Single Phase Induction motors are used in many applications including the domestic sector. In domestic sector, other type of motors like universal motors and brushless motors are also used in different home appliances. The machine is simple in construction, rugged and economical. The design simplicity is also worth mentioning. The output equation of the motor depending on the physical dimensions is [11],
φη cos kWQ = (1)
Therefore,
snCη
LD0
2
coskW
φ= (2)
where, Q - Output power C0 - Output coefficient D - Stator bore diameter L - Length of core ns - Synchronous speed The core length is generally made equal to the pole pitch but the exact dimensions are governed by manufacturing conditions and the diameter is selected with reference of frame size available in the market. Once the power, speed, power factor and efficiency of the machine are specified, in order to find D2L the output coefficient must be evaluated. Output coefficient, 3
w0 10 K 11 −= acBC av (3) where, Kw - Winding factor Bav - Average flux density in the air-gap ac - Specific electric loading The efficiency of a single phase induction motor in normal working conditions varies from 50% to 70% depending on the rating, starting from 70W to 750W with power factor varying from 0.55 to 0.65. The output coefficient depends on the specific electric loading. The usual values of specific electric loading are 5000 to 15000 A/m and average flux density in the air gap are
2 Wb/m0.55 to0.35 . The selected values of outer diameter, depth of stator slot, depth of stator core are verified with the flux per pole and the flux density in the stator core. Flux per pole,
tsists WL
P SB
×=mφ (4)
and, cs
m2 d L
Bi
tsφ= (5)
where, Bts - flux density in the stator teeth Ss - Number of stator slots P - Number of poles
Li - Net iron length Wts - Width of the stator tooth dcs - Depth of stator core If flux density in the stator core is within the limits the selected dimensions are correct. The number of stator slots and the slots per pole are selected, the total number of stator series turns in main winding,
mwm
m f k.ET
φ444= (6)
and, Area of the conductor,
density)(Current
winding)running in the(Current
m
mm δ
Ia = (7)
The rotor diameter is, gr lDD 2−=
(8)
where, E – Induced emf kwm – Winding factor for main winding f – frequency Ig – Air gap length The rotor bar is selected based on the number of rotor slots. Running performances are calculated by the equivalent circuit that can be developed by double revolving field theory. The equivalent circuit of SPIM based on double revolving field theory for any slip s is shown in Fig. 1.
smr 2lmX
2mX2lmX
2lmX2mX
srrm 2
)2(2 srrm −
Fig. 1. Equivalent circuit of single phase induction motor
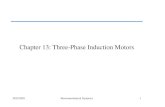
For any slip s, the value of If and Ib can be calculated. Forward torque, backward torque and gross motor torque are calculated in synchronous watt. The net motor torque is the difference of gross motor torque and iron, friction and windage losses. Therefore, Net output of the motor = (net motor torque) * (1-s) watt. Based on the above design procedure, a single phase induction motor with a rating of 370 W power output is designed. This rating has been chosen in view of the fact that most domestic applications as in water lifting pumps use fractional kilowatt motors with similar rating. Figure 2 shows the cross sectional view of the designed single phase induction motor. They are extensively used for electric drive for low power constant speed apparatus such as machine tools, domestic appliances, and agriculture machinery in

circumstances where a three phase supply is not readily available.
Fig. 2. Cross sectional view of designed single phase induction motor
The design and performance calculations are done with the theoretical approach. The specifications used for the design of SPIM are shown in Table I.
TABLE I
SPECIFICATION
Parameters Values Rated Output Power (kW) 0.37 Rated Voltage (V) 240 Number of Poles 2 Frequency (Hz) 50 Rated Speed (rpm) 2850
The designed values for SPIM are as in Table II. These were further used for investigation.
TABLE II DESIGNED VALUES OF SPIM FOR USE IN SIMULATION STUDIES
Parameters Values Type of Load Constant Power Physical dimensions of Designed motor Iron Core Length (mm) 65 Number of Stator Slot 24 Outer Diameter of Stator (mm) 95 Outer Width of Stator (mm) 93 Inner Diameter of Stator (mm) 55.25 Main-Phase Wire Diameter (mm) 0.724 Aux.-Phase Wire Diameter (mm) 0.683 Number of Rotor Slots 18 Air Gap (mm) 0.25 Inner Diameter of Rotor (mm) 16
III. SWITCHED RELUCTANCE MOTOR (SRM)
The origin of the switched reluctance motor can be traced back to 1842, but the reinvention has been due to the advent of inexpensive, high power switching devices. It has wound field coils of a dc motor for its stator winding and has no coils or magnets on its rotor and the stator and rotor have salient poles. The switched reluctance motor has some advantages such as simple construction, robustness and low cost and possible operation at high temperatures. The torque production in switched reluctance motor comes from the tendency of rotor poles to align with the excited stator poles. The operation
principle is based on the difference in magnetic reluctance for magnetic field lines between aligned and unaligned rotor position when a stator coil is excited. The rotor experiences a force which will pull the rotor to the aligned position. The torque ripple is an inherent drawback of switched reluctance motor. The torque ripple can be minimized through magnetic circuit design in the motor design stage or by torque control techniques. Fig. 3 shows the elementary equivalent circuit for the SRM.
)(tv
)(ti R
L
Fig. 3. Single phase equivalent circuit of SRM
This can be derived neglecting the mutual inductance between phase as follows. The applied voltage to a phase is equal to the sum of the resistive voltage drop and the rate of the flux linkages and is given as,
dt
i)dRiV ,(θλ+= (9)
The induced emf ,e is expressed as,
iωKiωdθ
i)dL(e mbm == ,θ (10)
where Kb is the back emf constant. A) Design of a Switched Reluctance Motor.
Torque of the machine,
⎟⎠⎞
⎜⎝⎛
=
602
kWN
T mπ
(11)
Step angle 360 11 ×⎟⎟⎠
⎞⎜⎜⎝
⎛−=
sr NN (12)
The speed of the motor depends on the frequency at which each phase is switched on and off. Therefore the speed of the motor is,
rpm 60360
phasesstator ofnumber angle step0
×××= fN s
Thus for the 8/6 motor, the step angle is 150, and it can be run at 3000 rpm, and each phase should be switched on and off at a frequency of 600 Hz. The frame size selection is based on the IEC, ISO and NEMA. The stator and rotor pole angle selection, inductance profile variation are described in [8]. The material selection for the stator and rotor are based on the BH characteristics of the material.
ss LβDA2
= (13)

Equation (13) gives the area of the stator pole. The area of the yoke also can be taken as area of the stator pole. The area of the rotor is calculated based on equation (13), [8]. The area of air gap is found out by the mean area of the rotor core and area of the stator core. The mean length of the circular yoke of the SRM can be found out from equation (14).
⎥⎦
⎤⎢⎣
⎡ −=22
0 CDl y (14)
From the BH characteristics of the material, the field intensities in the stator pole, stator yoke, rotor pole and rotor core are obtained. The equivalent magnetic circuit of the SRM can be drawn. Fig. 4 shows the simplified magnetic circuit of the SRM.
JAT =
2φ
LR
φ
2φ
LR LR
Fig. 4. Simplified magnetic circuit of the SRM The total ampere turns (AT) required for the operation of machine at full load can be calculated using (15). That is, iTJ ph= (15)
Turns per phase is, p
ph iJT = (16)
The rated current is, ph
p TJi = (17)
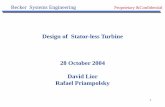
Considering equation (17) and the flux, aligned inductance is calculated. The stator pole pitch is determined and the minimum area of the conductor should be find out.
Fig. 5. Cross sectional view of designed Switched Reluctance Motor The specifications used for designing the SRM are shown in Table III.
TABLE III SPECIFICATIONS
Parameters Values Rated Output Power (kW) 0.37 Rated Voltage (V) 240 Given Rated Speed (rpm) 2850 Number of Poles 8/6
The designed values of SRM for further use in simulation studies are as in Table IV.
TABLE IV DESIGNED VALUES OF SRM FOR USE IN SIMULATION STUDIES
Parameters Values Type of Load Constant Power Physical dimensions of Designed motor Number of Stator Poles 8 Outer Diameter of Stator (mm) 95 Inner Diameter of Stator (mm) 50 Yoke Thickness (mm) 12.5 Length of Stator Core (mm) 65 Number of Turns per Pole 200 Wire Diameter (mm) 0.683 Number of Rotor Poles 6 Length of Air Gap (mm) 0.5 Inner Diameter of Rotor (mm) 15 Yoke Thickness (mm) 7 Length of Rotor Core (mm) 65
B) Power Convertors for SRM Since the torque in SRM drive is independent of the polarity of excitation current, the SRM drive requires only one switch per phase winding. Moreover, unlike the ac motor drives, the SRM drives always have a phase winding in series with a switch. Thus, in case of a shoot-through fault, the inductance of the winding limits the rate of rise in current and provides time to initiate the protection. Furthermore, the phases of the SRM are independent and, in case of failure of one winding, uninterrupted operation is possible. Commonly asymmetric bridge convertors are used (Fig. 6) in the working and control of SRM drives. It consists of two power switches (say power transistors, MOSFETs or IGBTs) and two diodes per phase. This type of the SR drive can support independent control of each phase and handle phase overlap. Turning on the power switches in each phase will circulate a current in that phase of SRM. The energy stored in the motor phase winding will keep the current in the same direction until it is depleted. The asymmetric bridge convertor has three modes of operation, which are defined as magnetization mode, freewheeling mode and demagnetization mode [8].
Fig. 6. A Phase winding of SRM with converter switches

IV. PERFORMANCE CHARACTERISTICS OF SPIM AND SRM
The performance analysis is done with the RMxprt in the Maxwell software using numerical solution of the equations describing the SPIM and SRM. The software simulation analysis includes the effects of magnetic saturation in the SRM. A) Single Phase Induction Motor The Performance Characteristics of the designed SPIM are shown in Figs 7, 8, 9 and 10.
Fig. 7. Input current Vs Speed
Single phase induction motors (SPIM) used in domestic appliances, at present, do contribute to a lot of energy loss due to their low efficiency. This paper discusses the possibility of using a machine like switched reluctance motor (SRM) with high efficiency in such applications.
Fig. 8. Efficiency Vs Speed
Fig. 9. Output Power Vs Speed
Fig. 10. Output Torque Vs Speed
Though the output power and other performance parameters of the designed SPIM satisfies the required specification, it may be noted that the efficiency at rated speed is less as is clear from Fig 8. B) Switched Reluctance Motor
The performance characteristics obtained for the designed SRM are provided in Figs 11-19.
Fig. 11. Flux linkage Vs Current at various positions
Fig. 12. Input DC Current Vs Speed
Fig. 13. Efficiency Vs Speed
Fig. 14. Output Power Vs Speed
Fig. 15. Output Torque Vs Speed
0.00 500.00 1000.00 1500.00 2000.00 2500.00 3000.00n (rpm)
3.00
3.50
4.00
4.50
5.00
5.50
6.00
(A)
ANSOFT
Curve InfoInput Current
0.00 500.00 1000.00 1500.00 2000.00 2500.00 3000.00n (rpm)
0.00
12.50
25.00
37.50
50.00
62.50
(%)
Curve InfoEfficiency
0.00 1000.00 2000.00 3000.00n (rpm)
0.00
125.00
250.00
375.00
500.00
625.00
(W)
Curve InfoOutput Power
0.00 500.00 1000.00 1500.00 2000.00 2500.00 3000.00n (rpm)
0.00
0.50
1.00
1.50
2.00
2.50
3.00
(N.m
)
SO
Curve InfoOutput Torque
0.00 5.00 10.00 15.00 20.00 25.00 30.00Ampere
0.00
0.20
0.40
0.60
0.80
1.00
Web
er
Curve InfoAt 0 Elec Degrees
At 20 Elec Degrees
At 30 Elec Degrees
At 40 Elec Degrees
At 50 Elec Degrees
At 60 Elec Degrees
At 70 Elec Degrees
0.00 1000.00 2000.00 3000.00n (rpm)
0.00
20.00
40.00
60.00
80.00
(A)
Curve InfoInput DC Current
0.00 1000.00 2000.00 3000.00n (rpm)
0.00
20.00
40.00
60.00
80.00
(%)
Curve InfoEfficiency
0.00 1000.00 2000.00 3000.00n (rpm)
0.00
200.00
400.00
600.00
800.00
1000.00
1200.00
(W)
Curve InfoOutput Power
0.00 1000.00 2000.00 3000.00n (rpm)
0.00
5.00
10.00
15.00
20.00
25.00
30.00
(N.m
)
Curve InfoOutput Torque

Fig. 16. Rated phase current Vs Electrical degree
Fig. 17. Flux linkage Vs Electrical degree
Fig. 18 Air-gap inductance Vs Electrical degree
Fig. 19. Phase Voltage Vs Electrical degree
The performance characteristics of SRM clearly show the superiority of this machine over the existing SPIM, since SRM gives a higher efficiency for the same output power.
V. DISCUSSION OF RESULTS
Based on the analysis, the performance of SPIM and SRM to be used in domestic applications is compared. This is detailed in Table V.
TABLE V COMPARISON OF PERFORMANCE OF SPIM AND SRM.
Parameters SPIM SRM Total Net Weight (kg): 6.86926 4.325 Total Loss(W) 307.244 50.875 Output Power(W) 360.716 368.21 Input Power (W) 667.96 419.085 Efficiency (%) 54.0026 87.8605 Rated Speed (rpm) 2774.77 2803.98 Rated Torque (N-m) 1.24139 1.25399
It is clear that, for the same output power, SRM has a very high efficiency of 87% compared to a low efficiency of 54% of SPIM. Moreover, the net weight of the SRM machine is much lower than SPIM, with practically negligible difference in the torque produced. From an energy conservation point of
view, is the best for the application in domestic appliances such as water lifting for agricultural purposes.
VI. CONCLUSION
Single phase induction motors (SPIM) used in domestic appliances, at present, do contribute to a lot of energy loss due to their low efficiency. This paper discusses the possibility of using a machine like switched reluctance motor (SRM) with high efficiency in such applications. The efficiency of SRM is found to be as high as 87.86% where as the SPIM provides only an efficiency of 54% under similar operating conditions. The advent of various new semiconductor devices can take care of the drives to be used with SRM and hence this investigation holds relevance in the present scenario. In this paper, SPIM and SRM are designed for the same output rating and are compared using a theoretical approach in conjunction with finite element method (FEM). The analysis of the results clearly show the superiority of SRM over SPIM and so proposes that SRM can replace the existing motor used in domestic appliances. The experimental investigation is in progress for establishing the explained FEM result.
REFERENCES
[1] Hassan Moghbelli, Gayle E. Adams, and Richard G. Hoft,
"Performance of a 10-HP Switched Reluctance Motor and Comparison with Induction Motor," IEEE Trans. on Ind. Appl., vol. 27, no. 3, pp. 531-538, May/June 1991.
[2] Kioskeridis, and C.Mademlis, "Maximum Efficiency in Single-Pulse Controlled Switched Reluctance Motor Drives," IEEE Transactions on energy Conversion, Vol. 20, No.4, pp.809-817, December 2005,
[3] Jaehyuck Kim, Keunsoo Ha and R. krishnan, "Single-Controllable-Switch-Based Switched Reluctance Motor Drive for Low Cost, Variable-Speed Applications,"IEEE Trans. on Power Electronics, vol. 27, no. 1, pp. 379-387, January 2012.
[4] Reinert and De Doncker, "Optimizing Performance in Switched-Reluctance Drives," IEEE Ind. Appl. Mag., pp. 63-70, July/August 2000.
[5] K. Vijayakumar, R. Karthikeyan, S. Paramasivam, R. Arumugan and K.N. Srinivas, "Switched Reluctance Motor modeling, Design, Simulation, and Analysis: A Comprehensive Review," IEEE Transaction on Magnetics, Vol. 44, No. 12, pp 4605-4617, December 2008.
[6] Jui-Yuan Chai and Chang-Ming Liaw, "Development of a Switched Reluctance Motor Drive With PFC Front End," IEEE Transaction on Energy Conversion, Vol. 24, No. 1, pp. 30-42, March 2009.
[7] Amit Kumar Jain, Ned Mohan, "Dynamic Modelling, Experimental Characterization, and Verification for SRM Operating With Simultaneous Two-Phase Excitation," IEEE Trans. on Ind. Electronics, vol. 53, no. 4, pp. 1238-1249, August 2006.
[8] Praveen Vijayaragavan, " Design of Switched Reluctance Motors and Development of a Universal Controller for Switched Reluctance and Permanent Magnet Brushless DC Motor Drives," Dissertation, November 15, 2001.
[9] K. Sundareswaran, "An Improved Energy-Saving Scheme for Capacitor-Run Induction Motor," IEEE Trans. on Ind. Electronics, vol. 48, no. 1, pp. 238-240, February 2001.
[10] Kumaravel S., "Design Optimization of Single Phase Capacitor Run Induction Motor," XXXII National System Confereance, NSC 2008, December 2008.
[11] A.K. Sawhney, "A Course in Electrical Machine Design" Dhanpat Rai & Sons, 1984.
0.00 125.00 250.00 375.00 500.00 625.00 750.00Electric Degree
0.00
12.50
25.00
37.50
50.00
62.50(A
)Curve Info
Maximum Phase Current
0.00 125.00 250.00 375.00 500.00 625.00 750.00Electric Degree
-0.05
0.05
0.15
0.25
(Wb)
Curve InfoFlux Linkage
0.00 125.00 250.00 375.00 500.00 625.00 750.00Electric Degree
0.00
50.00
100.00
150.00
200.00
250.00
300.00
(mH
)
Curve InfoTotal Inductance
0.00 125.00 250.00 375.00 500.00 625.00 750.00Electric Degree
-250.00
-125.00
0.00
125.00
250.00
(V)
Curve InfoPhase Voltage