![Installation Manual English - gavri.es · Pengawatan Kanopi Bilah Rumah Sakelar Perangkat Lampu Pengoperasian Kontrol Dinding ... (contoh: [a]) mengidentiikasi ... teks. 3. Petunjuk](https://static.fdocument.org/doc/165x107/5c9d0bd288c99397348c2910/installation-manual-english-gavries-pengawatan-kanopi-bilah-rumah-sakelar.jpg)
Perancangansistemkontroldengan root locus - Professional fileDasar Sistem Kontrol, Kuliah 11 ......
19
Perancangan sistem kontrol dengan root locus Dasar Sistem Kontrol, Kuliah 11
Transcript of Perancangansistemkontroldengan root locus - Professional fileDasar Sistem Kontrol, Kuliah 11 ......
Perancangan sistem kontrol dengan
root locus
Dasar Sistem Kontrol, Kuliah 11
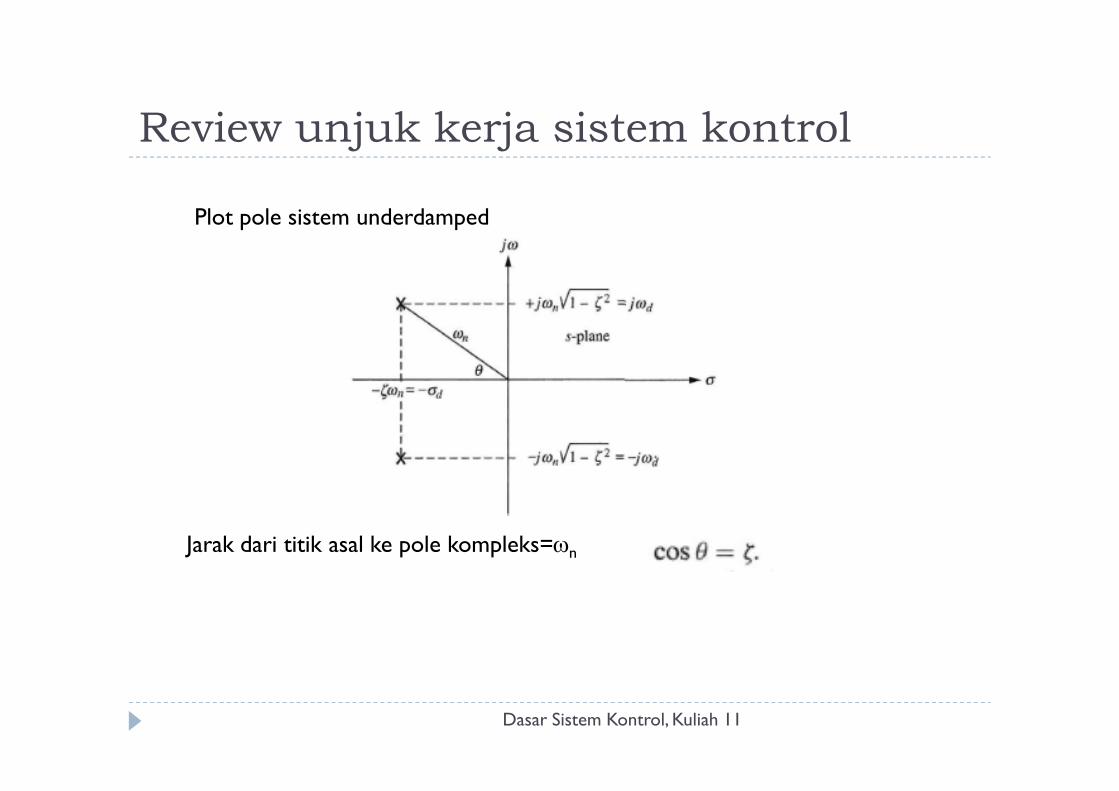
Review unjuk kerja sistem kontrol
Plot pole sistem underdamped
Dasar Sistem Kontrol, Kuliah 11
Jarak dari titik asal ke pole kompleks=ωn
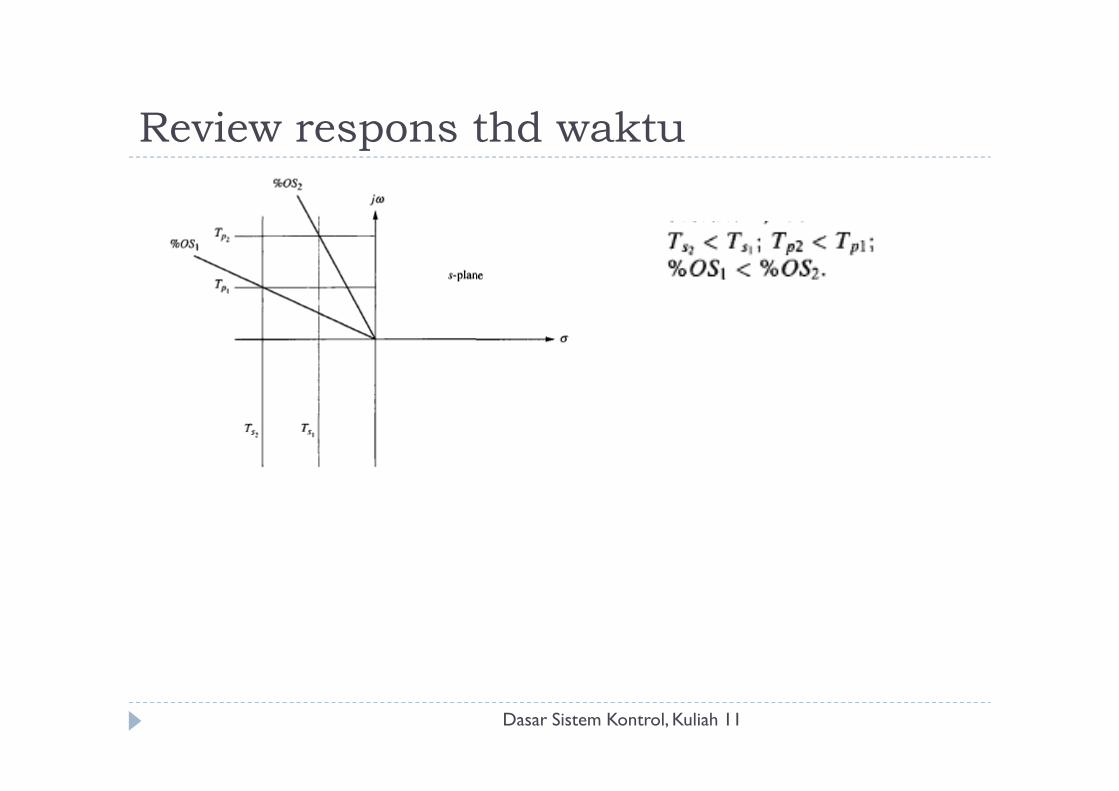
Review respons thd waktu
Dasar Sistem Kontrol, Kuliah 11
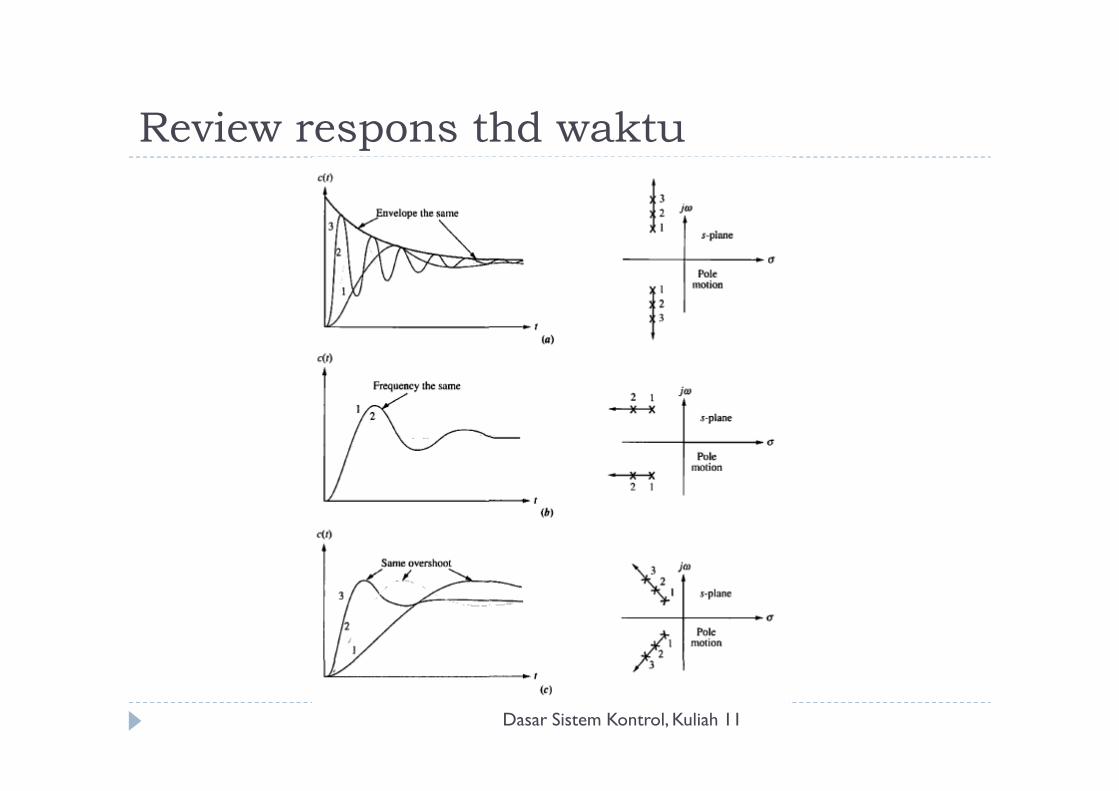
Review respons thd waktu
Dasar Sistem Kontrol, Kuliah 11
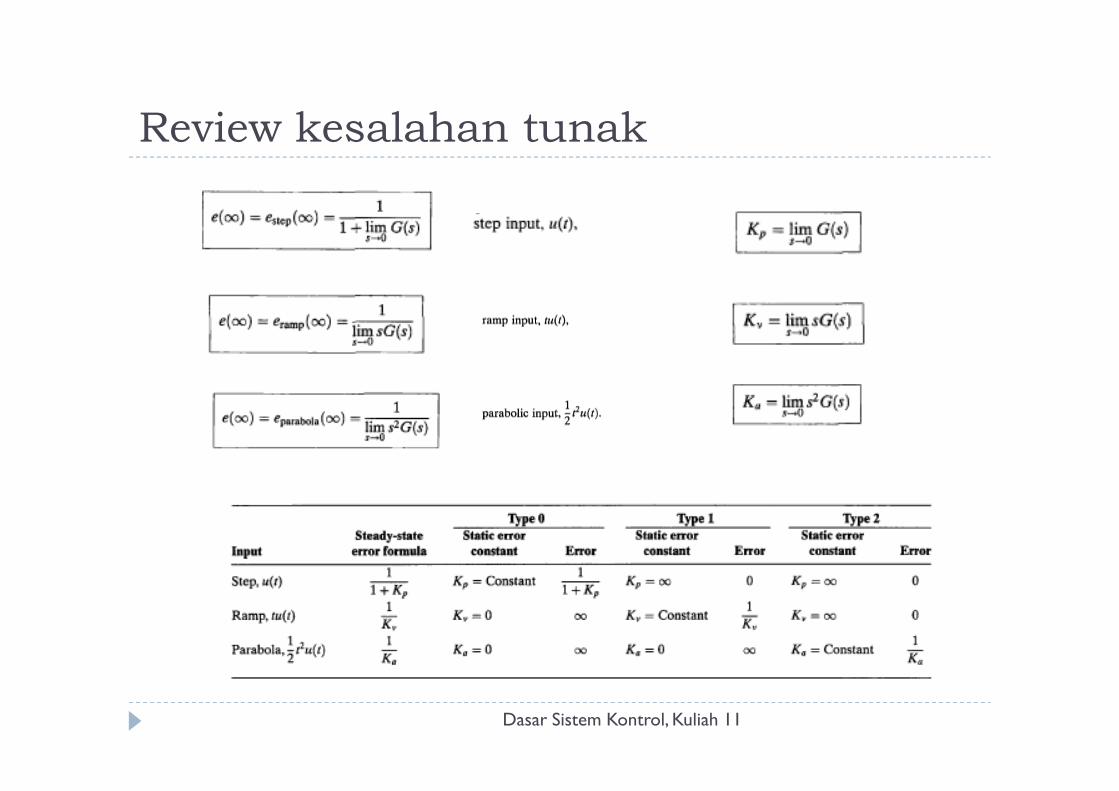
Review kesalahan tunak
Dasar Sistem Kontrol, Kuliah 11
Mengubah respons transien
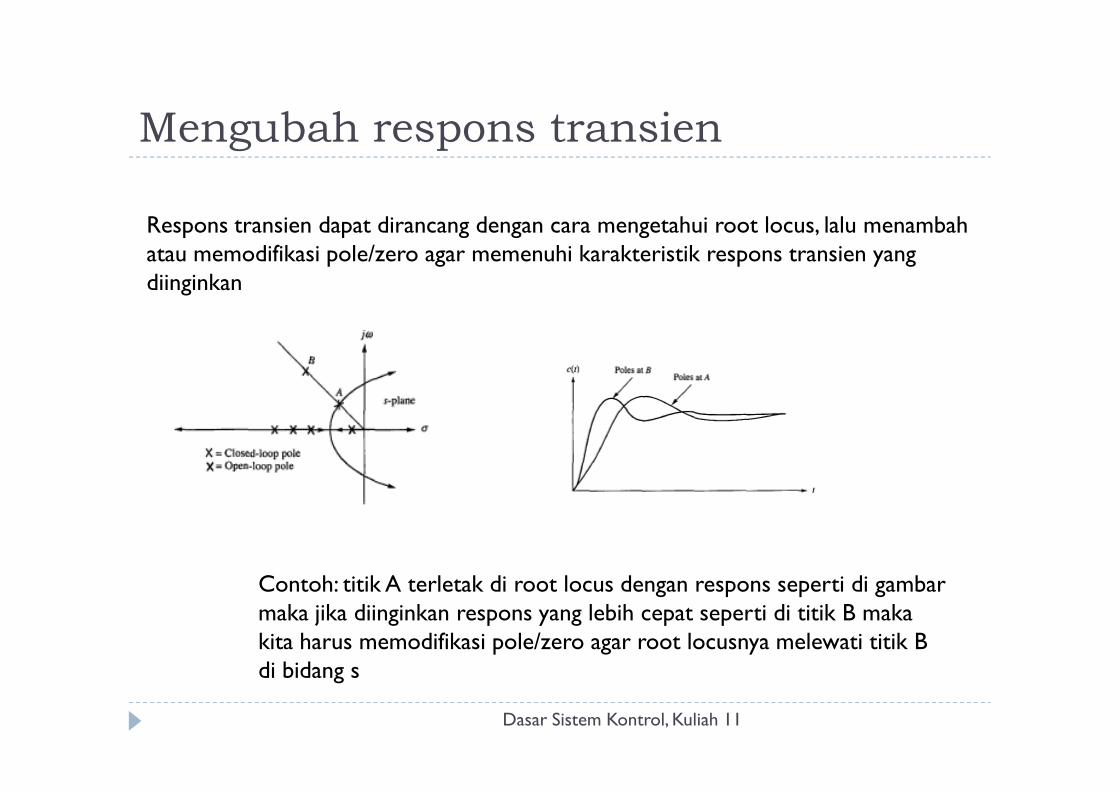
Respons transien dapat dirancang dengan cara mengetahui root locus, lalu menambahatau memodifikasi pole/zero agar memenuhi karakteristik respons transien yang diinginkan
Dasar Sistem Kontrol, Kuliah 11
Contoh: titik A terletak di root locus dengan respons seperti di gambarmaka jika diinginkan respons yang lebih cepat seperti di titik B makakita harus memodifikasi pole/zero agar root locusnya melewati titik Bdi bidang s
Mengurangi kesalahan tunak
Biasanya jika kita ingin mengubah respons transien menjadi lebih baik, kesalahan tunakakan membesar karena respons transien dan kesalahan tunak keduanya tergantungpada gain, makin besar gain, makin kecil kesalahan tunaknya tapi % OS makin besardan juga sebaliknya.Dengan suatu yang disebut kompensator, maka kita bisa mengatur agar kesalahan tunakdan respons transien yang kita inginkan.Kesalahan tunak dapat diperbaiki dengan menambahkan pole jerat terbuka di titik asal
Dasar Sistem Kontrol, Kuliah 11
Kesalahan tunak dapat diperbaiki dengan menambahkan pole jerat terbuka di titik asalkordinat (0,0) atau menaikkan tipe sistem (mis dari tipe 0 ke tipe 1) yang akanMenurunkan kesalahan tunak. Pole tambahan di titik asal tsb memerlukan sebuahintegrator (1/s)
Konfigurasi Kompensator
Dasar Sistem Kontrol, Kuliah 11
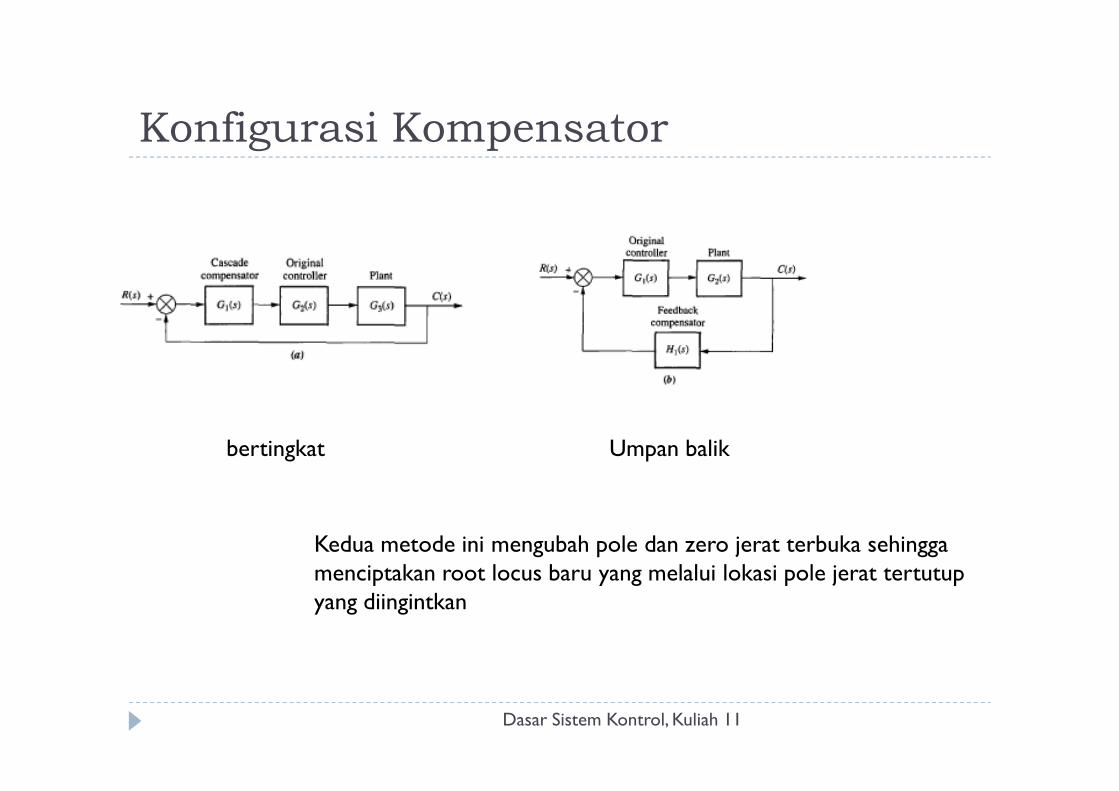
bertingkat Umpan balik
Kedua metode ini mengubah pole dan zero jerat terbuka sehinggamenciptakan root locus baru yang melalui lokasi pole jerat tertutupyang diingintkan
Kompensator
Kompensator yang menggunakan integrasi murni untuk memperbaiki kesalahantunak atau diferensial murni untuk memperbaiki respons transien disebutkompensator ideal.Dalam dunia elektronik kompensator ini dalam bentuk misalnya amplifier yangmerupakan komponen aktif yang memerlukan daya untuk menjalankannyaTerdapat juga komponen pasif yang dapat memperbaiki respons transien dankesalahan tunak tapi komponen pasif ini bukan lagi integrator/diferensiator murni
Dasar Sistem Kontrol, Kuliah 11
Memperbaiki kesalahan tunak dengan
kompensator bertingkat
Dua cara memperbaiki kesalahan tunak dengan kompensasi bertingkat dengan tujuanMemperbaiki kesalahan tunak tanpa terlalu mempengaruhi respons transien
1. Kompensator integral idealmenggunakan integrator murni untuk menempatkan pole jerat terbuka di titik asalkordinat sehingga meningkatkan tipe sistem dan mengurangi kesalahan tunak ke nol
2. Menggunakan kompensator yang tidak murni integral. Kompensator ini menempatkan
Dasar Sistem Kontrol, Kuliah 11
2. Menggunakan kompensator yang tidak murni integral. Kompensator ini menempatkanpole dekat dengan titik asal yang walaupun tidak menyebabkan kesalahan tunakmenjadi nol, kompensator ini mengurangi kesalahan tunak
Sistem yang memberikan nilai kesalahan ke plant disebut sistem kontrol proporsionalSistem yang memberikan integral dari kesalahan ke plant : sistem kontrol integralSistem yang memberikan derivatif dari kesalahan ke plant : sistem kontrol derivatif
Sistem kontrol dengan kompensator integral ideal : Pengatur Proporsional Integral (PI)Sistem kontrol dengan tidak menggunakan integral murni disebut kompensator lag
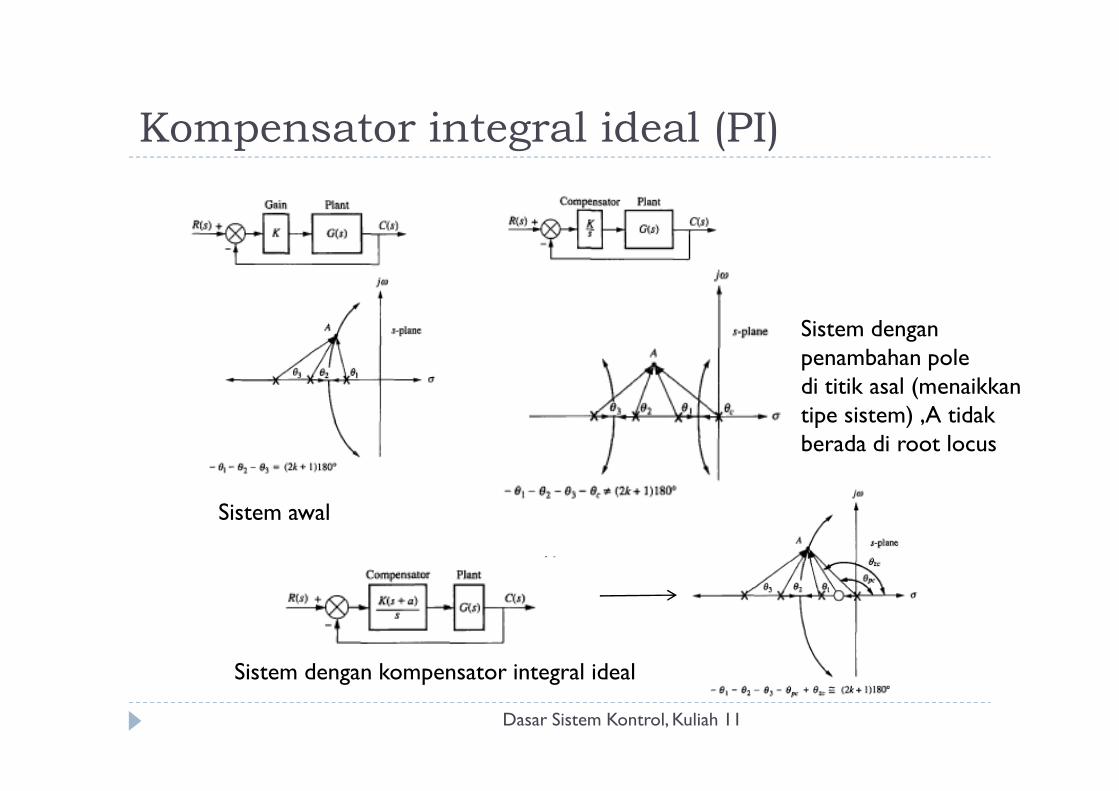
Kompensator integral ideal (PI)
Sistem denganpenambahan poledi titik asal (menaikkan
Dasar Sistem Kontrol, Kuliah 11
Sistem awal
di titik asal (menaikkantipe sistem) ,A tidakberada di root locus
Sistem dengan kompensator integral ideal
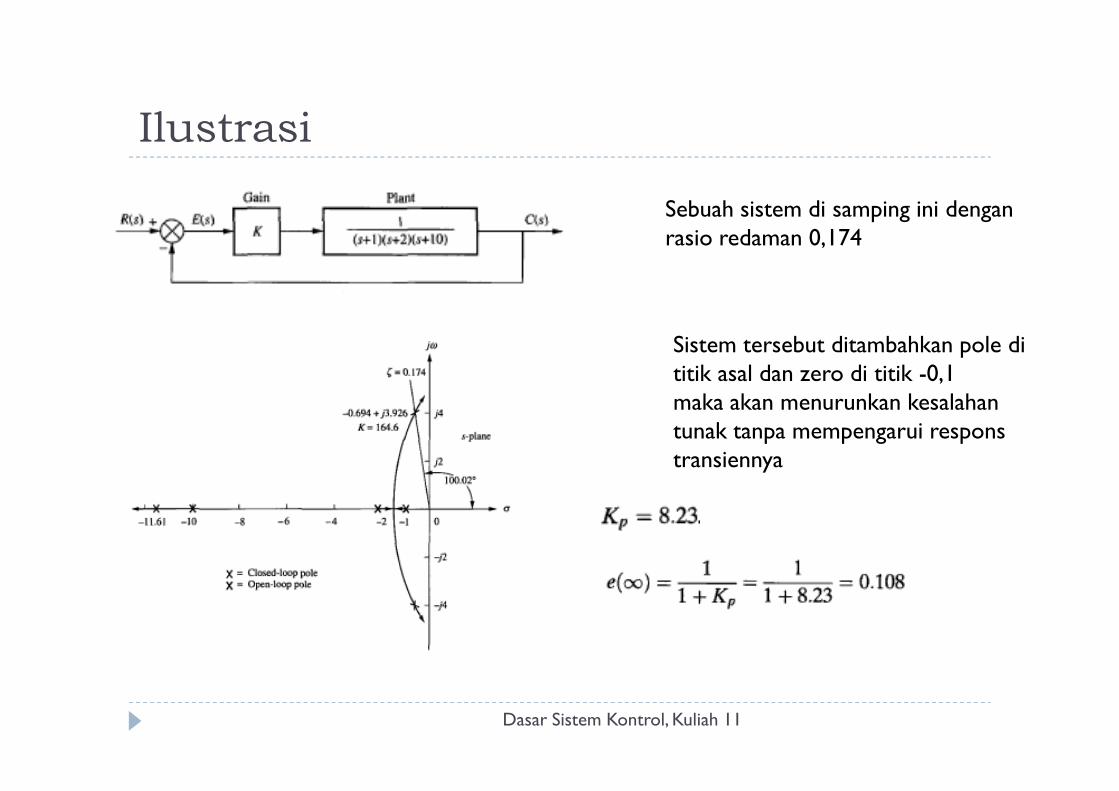
Ilustrasi
Sebuah sistem di samping ini denganrasio redaman 0,174
Sistem tersebut ditambahkan pole dititik asal dan zero di titik -0,1maka akan menurunkan kesalahan
Dasar Sistem Kontrol, Kuliah 11
maka akan menurunkan kesalahantunak tanpa mempengarui responstransiennya
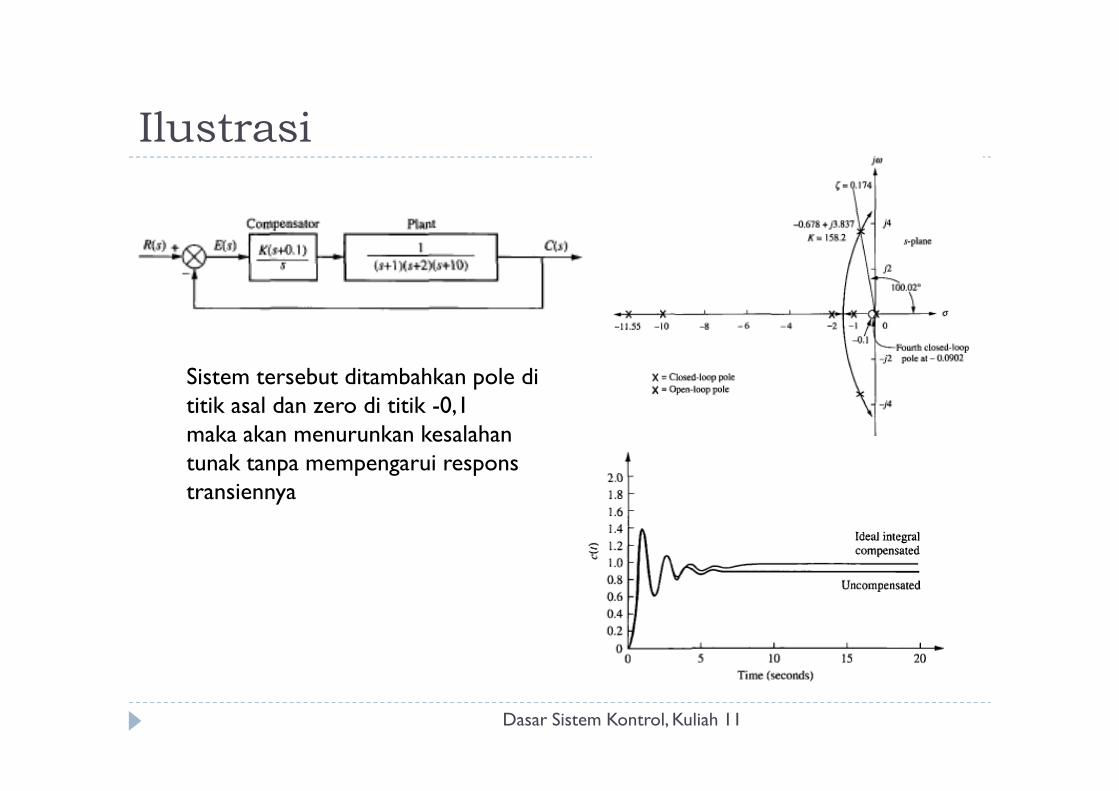
Ilustrasi
Sistem tersebut ditambahkan pole dititik asal dan zero di titik -0,1
Dasar Sistem Kontrol, Kuliah 11
titik asal dan zero di titik -0,1maka akan menurunkan kesalahantunak tanpa mempengarui responstransiennya
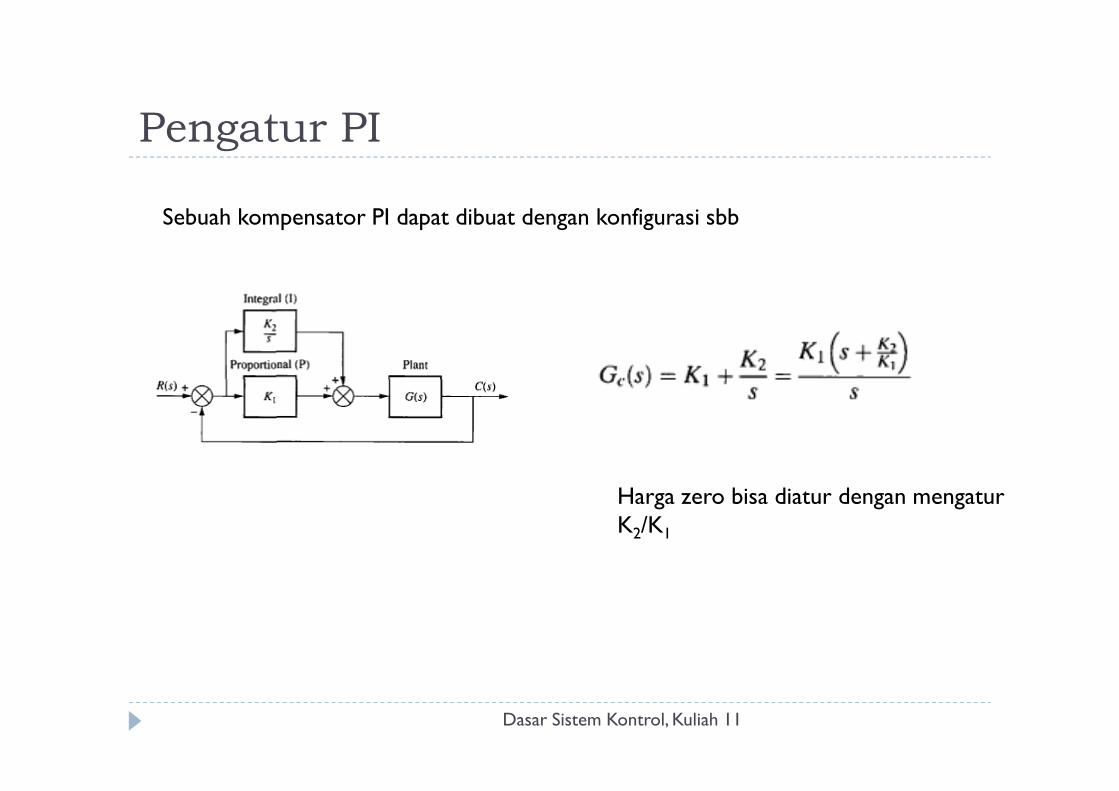
Pengatur PI
Sebuah kompensator PI dapat dibuat dengan konfigurasi sbb
Dasar Sistem Kontrol, Kuliah 11
Harga zero bisa diatur dengan mengaturK2/K1
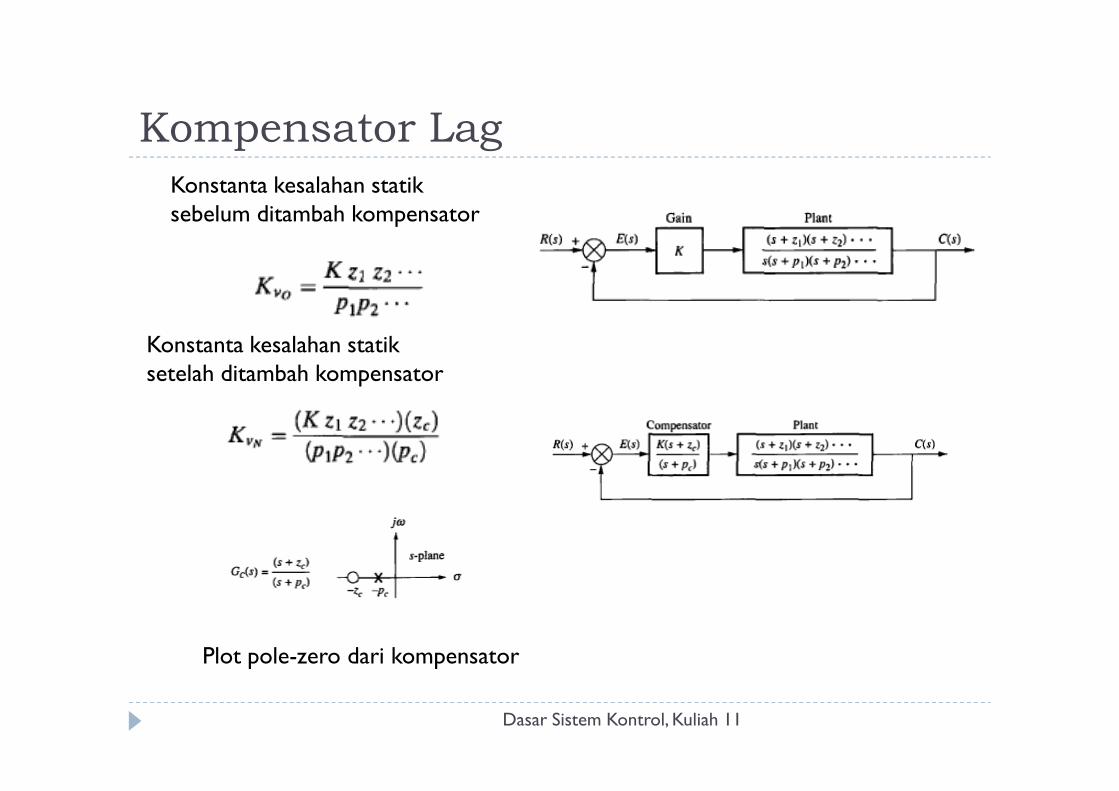
Kompensator Lag
Konstanta kesalahan statiksebelum ditambah kompensator
Konstanta kesalahan statiksetelah ditambah kompensator
Dasar Sistem Kontrol, Kuliah 11
Plot pole-zero dari kompensator
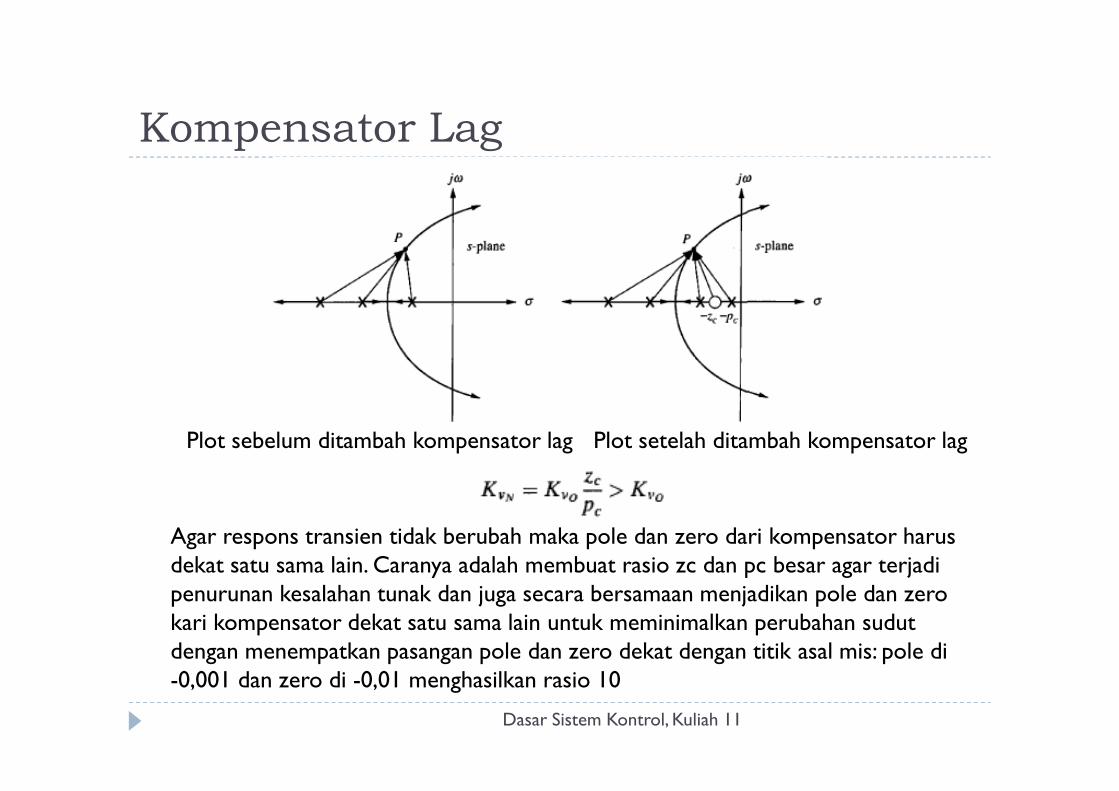
Kompensator Lag
Dasar Sistem Kontrol, Kuliah 11
Plot sebelum ditambah kompensator lag Plot setelah ditambah kompensator lag
Agar respons transien tidak berubah maka pole dan zero dari kompensator harusdekat satu sama lain. Caranya adalah membuat rasio zc dan pc besar agar terjadipenurunan kesalahan tunak dan juga secara bersamaan menjadikan pole dan zerokari kompensator dekat satu sama lain untuk meminimalkan perubahan sudutdengan menempatkan pasangan pole dan zero dekat dengan titik asal mis: pole di-0,001 dan zero di -0,01 menghasilkan rasio 10
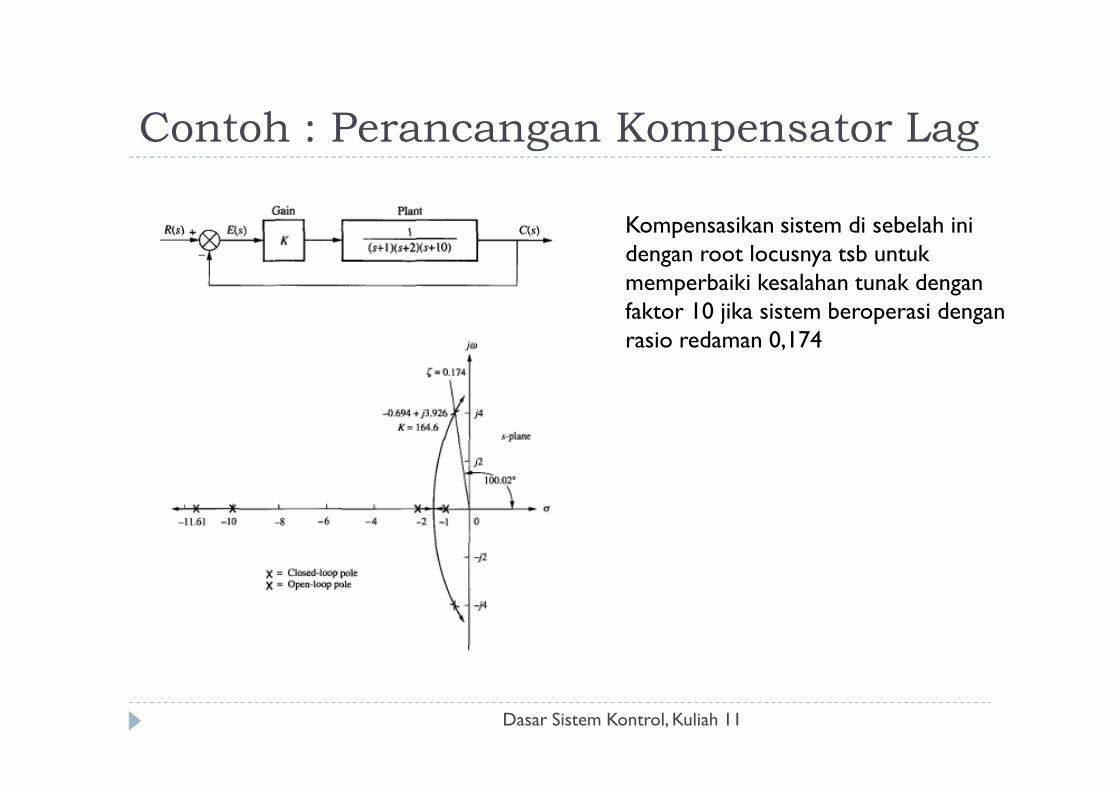
Contoh : Perancangan Kompensator Lag
Kompensasikan sistem di sebelah inidengan root locusnya tsb untukmemperbaiki kesalahan tunak denganfaktor 10 jika sistem beroperasi denganrasio redaman 0,174
Dasar Sistem Kontrol, Kuliah 11
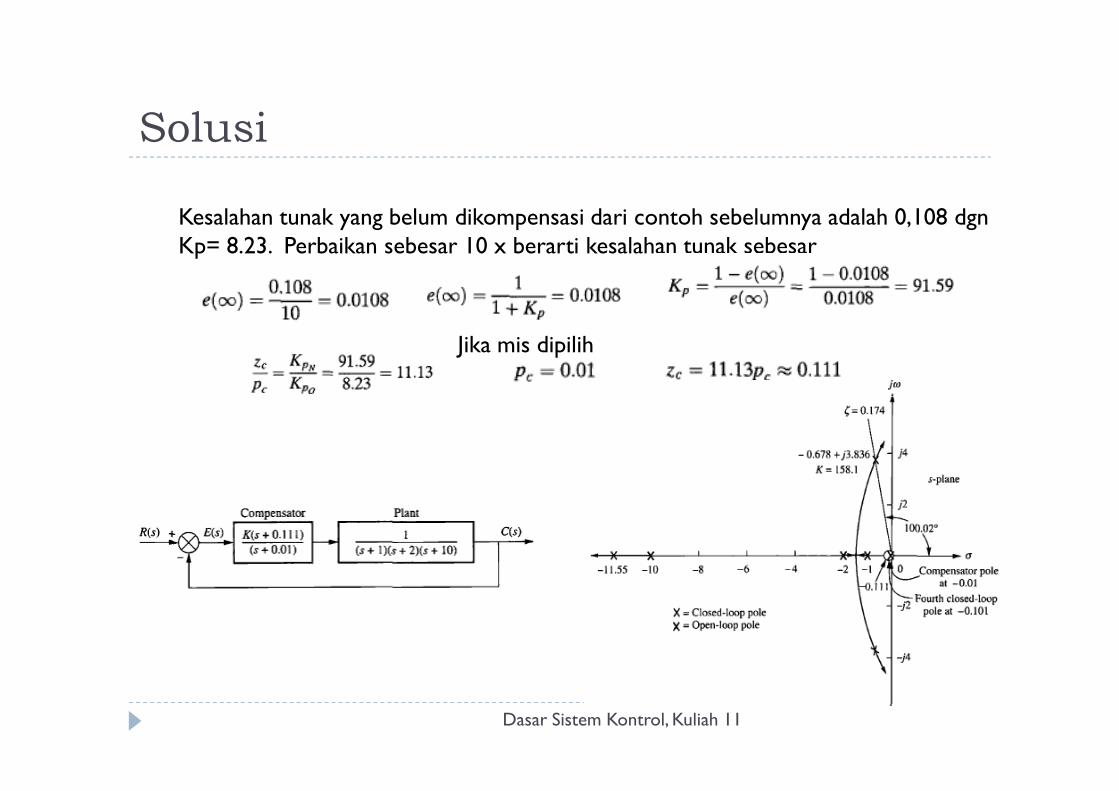
Solusi
Kesalahan tunak yang belum dikompensasi dari contoh sebelumnya adalah 0,108 dgnKp= 8.23. Perbaikan sebesar 10 x berarti kesalahan tunak sebesar
Jika mis dipilih
Dasar Sistem Kontrol, Kuliah 11
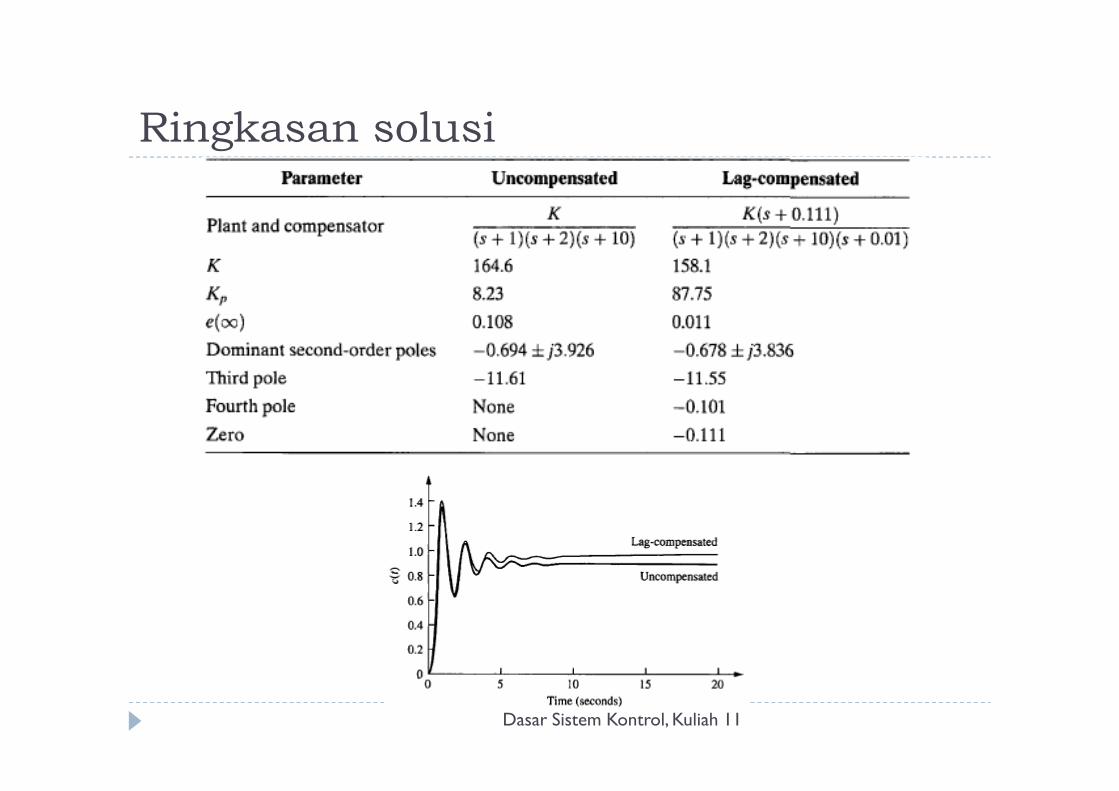
Ringkasan solusi
Dasar Sistem Kontrol, Kuliah 11