6 Root Locus
34
Introduction to Control Systems VI. Γεωμετρικός τόπος των ριζών (Root Locus)
-
Upload
nehakarunya -
Category
Documents
-
view
242 -
download
5
description
6 Root Locus
Transcript of 6 Root Locus

Introduction to Control Systems
VI. Γεωμετρικός τόπος των ριζών (Root Locus)

r y+
- K ( )G s
( ) ( )( ) 1 ( )
Y s KG sR s KG s
=+
Χαρακτηριστική εξίσωση: 1 ( ) 0KG s+ =
Ο γεωμετρικός τόπος των ριζών δίνει τις τροχιές των ριζών της χαρακτηριστικής εξίσωσης, καθώς το K μεταβάλλεται από 0 ως ∞.
1 ( ) 0( )1 0( )
( ) ( ) 01( )
KG sn sKd s
d s Kn s
G sK
• + =• + =• + =• = −
Ισοδύναμες μορφές

Παράδειγμα
( )1( )
1G s
s s=
+
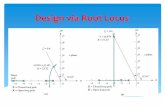
Να βρεθούν οι ρίζες της χαρακτηριστικής εξίσωσης (σύστημα κλειστού βρόχου) ως συνάρτηση του Κ.
( )2
1 2
1 ( ) 0
1 0 01
1 1 4Ρίζες: ,2
KG sK s s K
s s
Kr r
+ =
+ = ⇒ + + =+
− ± −=
-1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8Root Locus
Real Axis
Imag
inar
y A
xis θ=sin-1(J)

Γεωμετρικός τόπος ριζών (ΓΤΡ)
1 ( ) 0( ) ( ) 1 0
( ) 1
( ) 180 360
KG sKG s KG s j
KG s
KG s µ
+ =
⇒ ∠ = − +
=
∠ = ± ⋅
•Ο γεωμετρικός τόπος των ριζών είναι το σύνολο τιμών του s για τις οποίες 1+KG(s)=0.
•Συνήθως η G(s) είναι η συνάρτηση ανοικτού βρόχου του συστήματος.
•Ο γεωμετρικός τόπος των ριζών της G(s) είναι το σύνολο των σημείων στο μιγαδικό επίπεδο στα οποία η φάση της G(s) ισούται με 180 360µ± ⋅

( )
( )1
1
0 1 2 3 4
( )
( )
m
iin
ii
s zG s
s p
G s θ θ θ θ
=
=
+=
+
∠ = − − −
∏
∏

Διαδικασία για σχεδίαση του ΓΤΡ
Βήμα 1: Βρίσκουμε τη χαρακτηριστική εξίσωση 1+G(s)=0 και την ξαναγράφουμε (αν χρειάζεται) έτσι ώστε η μεταβλητή Κ που μας ενδιαφέρει να εμφανίζεται ως: 1+ΚP(s)=0.
( )
( )1
1
1 0
m
iin
ii
s z
s p
=
=
++ Κ =
+
∏
∏
Βήμα 3: Σημειώνουμε τους πόλους στο μιγαδικό επίπεδο με “X” και τα μηδενικά με “Ο”.
Βήμα 2: Παραγοντοποιούμε την P(s) υπό μορφή πόλων και μηδενικών:

Βήμα 4: Βρίσκουμε τα τμήματα του πραγματικού άξονα που ανήκουν στο ΓΤΡ. α) Όταν Κ=0 οι ρίζες της χαρακτηριστικής εξίσωσης είναι οι πόλοι της P(s). Καθώς το Κ πλησιάζει το ∞, οι ρίζες της χαρακτηριστικής εξίσωσης είναι τα μηδενικά της P(s). Ο ΓΤΡ ξεκινά από τους πόλους και καταλήγει στα μηδενικά. Μερικές φορές κάποια από τα μηδενικά βρίσκονται στο άπειρο. β) Ο πραγματικός άξονας που βρίσκεται στα αριστερά από περιττό αριθμό πόλων και μηδενικών, ανήκει στο ΓΤΡ. Π.χ.
Re(s)
Im(s)
s0

Παράδειγμα
r y+
- K ( )G s
3 2
1( )8 32
G ss s s
=+ +
Βήμα 1: 3 2
3 2
Χαρακτηριστική εξίσωση: 1 08 32
1( )8 32
s s s
P ss s s
Κ+ =
+ +
⇒ =+ +
Βήμα 2: ( ) ( )( )23 2 28 32 8 32 4 16
Πόλοι: 0,-4 4Μηδενικά: , ,
s s s s s s s s
j
+ + = + + = + +
±∞ ∞ ∞

Βήμα 3&4: Το τμήμα του πραγματικού άξονα που ανήκει στο ΓΤΡ είναι στα αριστερά του πόλου s=0.
Re(s)
Im(s)
-4
-4j
Βήμα 6: Ο ΓΤΡ είναι συμμετρικός ως προς τον πραγματικό άξονα.
Βήμα 5: Υπολογισμός του αριθμού των ξεχωριστών κλάδων, ο oποίος ισούται με των αριθμό των πόλων n (ή τον αριθμό των μηδενικών m αν m > n ).

Βήμα 7: Σχεδιασμός των ασύμπτωτων για Κ→∞.
n= αριθμός πόλων m=αριθμός μηδενικών
Υπάρχουν n-m ασύμπτωτες
Οι ασύμπτωτες έχουν κέντρο σΑ και γωνία φΑ
( ) ( )
( )
1 1
2 1 180 , 0,1,... 1
n m
i ii i
p z
n mq q n m
n m
σ
ϕ
= =Α
Α
− − −=
−+
= ⋅ = − −−
∑ ∑

Παράδειγμα
( )( )
( ) ( ) ( ) ( )
2
1 1
1( )4 16
3 ασύμπτωτες
0 4 4 4 4 0 83 3
2 1 2 1180 180 , 0,1,23
60 ,180 ,300
n m
i ii i
P ss s
p z j jn m
q q qn m
σ
ϕ
ϕ
= =Α
Α
Α
=+ +
→
− − −− + − − −
→ = = = −−
+ +→ = ⋅ = ⋅ =
−⇒ =
∑ ∑
Re(s)
Im(s)
-4
-4j
-8/3

Βήμα 8: Εύρεση των σημείων στο φανταστικό άξονα που περνά ο ΓΤΡ (χρησιμοποιώντας το κριτήριο Routh-Hurwitz)
Παράδειγμα ( )( )2
3 2
3
2
1
0
1( )4 16
1 ( ) 0 8 32 0
Πίνακας Routh1 328
P ss s
KP s s s s K
sKs
bsKs
=+ +
+ = ⇒ + + + =
Το Κ=256 αντιστοιχεί σε μια λύση s=jω0 για κάποιο ω0.
( ) ( ) ( )3 20 0 0
20
030 0
8 32 256 0Εξισώνοντας πραγματικά και φανταστικά μέρη:
8 256 032 5.66
sec32 0
j j j
rad
ω ω ω
ωω
ω ω
⇒ + + + =
− + = = ± = ±− + =
8 32 0 2568
Kb K⋅ −= > ⇒ <

Βήμα 9: Εύρεση σημείων απόσχισης στον πραγματικό άξονα (αν υπάρχουν)
Παράδειγμα
( )
( ) 2
1( )1
1 ( ) 01
10 2 1 02
P ss s
KP sK s s s s
dK s sds
=+
+ =
= − + = − −
= ⇒ − − = ⇒ = −
Re(s)
Im(s) -4j
-1/2 -1
Γενικά: 0 στο σημείο απόσχισης (πολλαπλή ρίζα)dKds
=
2
( ) ( )1 0 ( ) ( ) 0( ) ( )
( ) ( ) ( ) ( ) 0( )
n s d sK d s Kn s Kd s n s
dK n s d s d s n sds n s
+ = ⇒ + = ⇒ = −
′ ′− += =

Παράδειγμα
( )
3 2
3 2
2
1( )8 32
1 ( ) 0 8 32
3 16 32 0 2.67 1.89
0 είναι αναγκαία αλλά όχι ικανή συνθήκη
για να δείξει αν ένα σημείο είναι σημείο απόσχισης.
P ss s s
KP s K s s sdK s s s jds
dKds
=+ +
+ = ⇒ = − − −
= − + + = ⇒ = − ±
→ =
Παράδειγμα 2
2
2
( )1
11 ( ) 0
0 1 0 1
sP ss
sKP s Ks
dK s sds
=+
− −+ = ⇒ =
= ⇒ − = ⇒ = ±Re(s)
Im(s) j
-1

Βήμα 10: Εύρεση της γωνίας αναχώρησης [angle of departure] από τους πόλους και της γωνίας άφιξης [angle of arrival] στα μηδενικά.
( ) 180 360 για s=pi iP s ή zµ∠ = ±
Παράδειγμα
( )( )2
1 2 3
1
1
1
1( )4 16
180 360
90 135 180 360
405 360 45 360
45
P ss s
θ θ θ µ
θ µ
θ µ µ
θ
=+ +
− − − = ±
− − − = ±
− = ± = ±
= −
Παράδειγμα
2
1 2 3
2
2
( )1
180 360
90 90 180 360
180
sP ss
θ θ θ µ
θ µ
θ
=+
− − = ±
− − = ±
=
Re(s)
Im(s)
θ2
θ1
θ3
Re(s)
Im(s)
θ3
θ2
θ1

Βήμα 11: Ολοκλήρωση του ΓΤΡ χρησιμοποιώντας τους κανόνες που αναπτύχθηκαν στα προηγούμενα βήματα.
Παράδειγμα
( )( )2
1( )4 16
P ss s
=+ +
Κ=256
Κ=256

r y+
- K
( )G s
2
11 0sKs+
+ =
Παράδειγμα
2
1ss+
Βήμα 1&2: Χαρακτηριστική εξίσωση:
2
1( ) sP ss+
=Πόλοι: 0,0Μηδενικά: -1,∞
Βήμα 3&4:
Re(s)
Im(s)
-1
Διπλός πόλος

Βήμα 5,6,7:
( ) ( ) ( )1 1
•2 ξεχωριστοί κλάδοι•Μια ασύμπτωτη
0 0 1• 1
12 1• 180 180 , 0
n m
i ii i
p z
n mq q
n m
σ
ϕ
= =Α
Α
− − −+ − −
= = =−
+= ⋅ = =
−
∑ ∑
Βήμα 8: Σημεία τομής με φανταστικό άξονα.
2
2
1
0
1 ( ) 0 0
Πίνακας Routh
1Για Κ>0 όλες οι ρίζες βρίσκονται στο ΑΗΠ.
KP s s Ks K
s Ks Ks K
+ = ⇒ + + =

Βήμα 9: Σημεία απόσχισης (πολλαπλές ρίζες)
( )( )
22
22
2
2 2
11 0 ( 1) 0
2 10
1 1
2 2 0( 2) 00, 2
sK s K ss
s s ss dKKs ds s
s s ss s
s
++ = ⇒ + + =
− + += − ⇒ = =
+ +
⇒ − − + =⇒ − + =⇒ = −
Βήμα 10: Γωνίες αναχώρησης
2 1
1 1
1
2 180
0 2 180 90
Λόγω συμμετρίας 90
θ θ
θ θ
θ
− =
− = ⇒ = −
=
Re(s)
Im(s)
-1 θ1
θ2

Βήμα 11:
Re(s)
Im(s)
-1 -2
Παράδειγμα Να βρεθεί η τιμή του Κ για s=-2 (εκεί δηλαδή που υπάρχει διπλή ρίζα για s=-2). Χαρακτηριστική εξίσωση: ( ) ( )22
2
s 1 2
4 44
K s s
s sK
+ + = +
= + +⇒ =

Παράδειγμα ( )2
1( )4
sP ss s
+=
+
Βήμα 1,2,3,4:
Re(s)
Im(s)
-1 -4
Διπλός πόλος
Βήμα 5,6,7:
( ) ( ) ( ) ( )1 1
•3 ξεχωριστοί κλάδοι•2 ασύμπτωτες
0 0 4 1 3•2 2
2 1• 180 90 ,270 0,1
n m
i ii i
p z
n mq q
n m
σ
ϕ
= =Α
Α
− − −+ + − − −
= = = −−
+= ⋅ = =
−
∑ ∑
Re(s)
Im(s)
-1 -4 -3/2

Βήμα 8: ( )2
3 2
3
2
1
0
11 ( ) 0 1 04
4 0
Πίνακας Routh14
Για Κ>0 όλες οι ρίζες είναι στο ΑΗΠ.3 4
sKP s Ks s
s s Ks K
KsKs
KsKs
++ = ⇒ + =
+
⇒ + + + =
Βήμα 9: Πολλαπλές ρίζες
( )
( )( ) ( )( )
( )
2
2 2
2
3 2
2
41
3 8 1 40
1
2 7 8 0
2 7 8 0
0, 1.75 0.97
s sK
ss s s s sdK
ds s
s s s
s s s
s j
+= −
+− − + + +
= =+
⇒ − − − =
⇒ − + + =
⇒ = − ±

Βήμα 10: Γωνίες αναχώρησης
1
1
1
1
2 180
0 0 2 180
90
90
z pθ θ θ
θ
θ
θ
− − =
− − =
= −
=
Re(s)
Im(s)
-1 θ1
θz
-4 θp
Βήμα 11:
Re(s)
Im(s)
-1 -4

Matlab
-25 -20 -15 -10 -5 0 5 10-20
-15
-10
-5
0
5
10
15
20Root Locus
Real Axis
Imag
inar
y A
xis
num=1; den=[1,8,32,0]; rlocus(tf(num,den))
( )( )2
1( )4 16
P ss s
=+ +

-4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5-1.5
-1
-0.5
0
0.5
1
1.5Root Locus
Real Axis
Imag
inar
y A
xis
num=[1 1]; den=[1,0,0]; rlocus(tf(num,den))
2
1( ) sP ss+
=

( )2
1( )4
sP ss s
+=
+
num=poly([-1]); den=poly([0,0,-4]); rlocus(tf(num,den))
-4.5 -4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5-10
-8
-6
-4
-2
0
2
4
6
8
10Root Locus
Real Axis
Imag
inar
y A
xis

Παράδειγμα ( )2
1( )12
sP ss s
+=
+
( ) ( ) ( ) ( )1 1
•Πόλοι: 0,0,12•Μηδενικά : 1, ,•3 ξεχωριστοί κλάδοι•2 ασύμπτωτες
0 0 12 1 11•2 2
2 1• 180 90 ,270 , 0,1
n m
i ii i
p z
n mq q
n m
σ
ϕ
= =Α
Α
− ∞ ∞
− − −+ + − − −
= = = −−
+= ⋅ = =
−
∑ ∑
Re(s)
Im(s)
-1 -12 -11/2

3 2
3
2
1
0
12
Πίνακας Routh1
12Για Κ>0 όλες οι ρίζες είναι στο ΑΗΠ.
11 12
s s Ks K
KsKs
KsKs
+ + +
•Σημεία τομής με φανταστικό άξονα
•Πολλαπλές ρίζες
( )
( )( ) ( )( )
( )( )
2
2 2
2
2 2
2
121
3 24 1 120
1
12 3 27 24 0
2 15 24 0
0, 5.18, 2.31
s sK
ss s s s sdK
ds s
s s s s s
s s s
s
+= −
+− − + + +
= =+
⇒ + − − − =
⇒ − + + =
⇒ = − −

•Γωνίες αναχώρησης: όπως στο προηγούμενο παράδειγμα
Re(s)
Im(s)
-1 -12

( )2
1( )12
sP ss s
+=
+
num=poly([-1]); den=poly([0,0,-12]); rlocus(tf(num,den))
-14 -12 -10 -8 -6 -4 -2 0 2-10
-8
-6
-4
-2
0
2
4
6
8
10Root Locus
Real Axis
Imag
inar
y A
xis

Παράδειγμα
( ) ( )1 1
•Πόλοι: 0,-2,-1 2j•Μηδενικά : , , ,•4 ξεχωριστοί κλάδοι•4 ασύμπτωτες
0 2 1 1• 14
2 1• 180 45 ,135 , 45 , 135 0,1,2,3
n m
i ii i
p z
n mq q
n m
σ
ϕ
= =Α
Α
±∞ ∞ ∞ ∞
− − −− − −
= = = −−
+= ⋅ = − − =
−
∑ ∑
( ) ( )( )2
1( )2 1 4
P ss s s
=+ + +
( )
4 3 2
4
3
2
1
0
4 9 10 0Πίνακας Routh
1 94 10
13 22 65 4 13
s s s s K
Kss
KsKs
Ks
+ + + + =
−
•Σημεία τομής με φανταστικό άξονα
06565 4 0 16.254
K
K K
και>
− > ⇒ < =
0 16.25K⇒ < <

Για την εύρεση της ω0 λύνουμε την εξίσωσης για s=jω0 και Κ=16.25
( ) ( ) ( ) ( )
( )
4 3 20 0 0 0
4 3 20 0 0 0
4 20 0
30 0
2 20 0 0 0
4 9 10 16.25 0
4 9 10 16.25 0Εξισώνοντας πραγματικά και φανταστικά μέρη:
9 16.25 0
4 10 052 2 5 0 1.582 sec
j j j j
j j
rad
ω ω ω ω
ω ω ω ω
ω ω
ω ω
ω ω ω ω
+ + + + =
− − + + =
− + =− + =
− − = ⇒ = ⇒ =
•Γωνία αναχώρησης από τον πόλο -1+2j
1 2 3 180 360
116.6 63.4 90 180 360
270 180 360 90
90
dep
dep
dep
dep
ϕ ϕ ϕ ϕ µ
ϕ µ
ϕ µ
ϕ
− − − − = ±
− − − − = ±
− = + ± =
= −

•Πολλαπλές ρίζες
( )( )
4 3 2
3 2
2
4 9 10
4 12 18 10 0
1 4 8 10 0
1, 1 1.22
K s s s sdK s s sds
s s s
s j
= − − − −
= − − − − =
⇒ + + + =
⇒ = − − ±

( ) ( )( )2
1( )2 1 4
P ss s s
=+ + +
num=1; den=poly([0,-2,-1+2i,-1-2i]); rlocus(tf(num,den))
-8 -6 -4 -2 0 2 4 6-8
-6
-4
-2
0
2
4
6
8Root Locus
Real Axis
Imag
inar
y A
xis