Offshore Wind Farm: Loads, dynamics and structures
95
2007-2008 1 Loads, dynamics and structural design Offshore Wind Farm Design Michiel Zaaijer DUWIND
-
Upload
tu-delft-opencourseware -
Category
Education
-
view
5.335 -
download
6
Transcript of Offshore Wind Farm: Loads, dynamics and structures

2007-2008
1
Loads, dynamics and structural design
Offshore Wind Farm Design
Michiel Zaaijer
DUWIND

2007-2008 2
Overview
• Introduction
• Modelling offshore wind turbines
• Types of analysis and tools
• Loads and dynamics in design

2007-2008 3

2007-2008
4
IntroductionLoads, dynamics and structural design

2007-2008 5
Harmonic loading
( ) ( )ϕω +⋅⋅= tFtF sinˆ
0 1 2 3 4 5 61
0
1
Simple Harmonic Loading
Time
Loa
ding
- Gravity loads on blades- Mass imbalance rotor (1P)- Aerodynamic imbalance (1P)- Small regular waves
27 RPM = 0.45 Hz

2007-2008 6
Non-harmonic periodic loading
0 1 2 3 4 5 61
0
1
Complex Cyclic Loading
Time
Lo
adin
g
- Wind-shear- Yaw misalignment- Tower shadow- Rotational sampling of turbulence
0 1 2 3 4 5 60.5
0
0.51st Signal (0.5 Hz)
Time
Lo
adin
g
0 1 2 3 4 5 60.5
0
0.52nd Signal (1 Hz)
Time
Lo
adin
g
0 1 2 3 4 5 60.5
0
0.53rd Signal (1.5 Hz)
Time
Lo
adin
g
( )
( )0ˆ sink k
k
F t
a a F k tω ϕ∞
=
+ +∑
(all 2P or 3P and multiples)
3P

2007-2008 7
Non-periodic random loading
0 1 2 3 4 5 6
1
0
1
Random Load
Time
Loa
din
g
- Turbulence (small scale)- Random waves

2007-2008 8
Other (non-periodic) loading
Transients
0 1 2 3 4 5 61
0
1
Step Load
Time
Loa
ding
Short events
0 1 2 3 4 5 61
0
1
Impulsive Load
Time
Loa
ding
- Start/stop- Turbine failures- Storm front
- Extreme gust- Extreme waves

2007-2008
9
IntroductionLoads, dynamics and structural design

2007-2008 10
The effect of dynamics
km
k = 1 [N/m]
-2
-1
0
1
2
1F
Force [N]
-2
-1
0
1
2
1
xResponse [m]
?

2007-2008 11
The effect of dynamics
-2
-1
0
1
2
1
-2
-1
0
1
2
1
m= 0.0005 [kg]
-2
-1
0
1
2
1
m= 0.1 [kg]
Force [N]
-2
-1
0
1
2
1
m= 0 [kg]
(Static)

2007-2008 12
-2
-1
0
1
2
1
-2
-1
0
1
2
1
The effect of dynamics
km
FSystem
Fintern = k · x
Force [N]
m= 0.0005 [kg]
Response [m]Internal forces ≠ external forcesdue to dynamics
Internal forces drive the design,not external forces!

2007-2008 13
Dynamic amplification factor
0 1 2 3 4 50
1
2
3
4
5
damping ratio = 0.1damping ratio = 0.2damping ratio = 0.5
Frequency RatioD
yna
mic
Am
plif
ica
tion
Fa
cto
r (D
AF
)
Note: the DAF is defined for harmonic excitation
DAF = Dynamic amplitudeStatic deformation
fexcitation
fnatural
Resonance

2007-2008 14
Character of resonance
• Excitation frequency ≈ natural frequency
• Large oscillations
• Fatigue damage (due to severe cyclic loading)
• Generally not destructive (anticipated in design)
Natural frequencies of wind turbine (-components) are close to several excitation frequencies

2007-2008 15
Classification for wind turbines
1P 3P
soft-soft soft-stiff stiff-stiff
1
DAF
f0
Excitation
Response

2007-2008 16
Soft-stiff example
1P = 0.45 Hz
fnatural= 0.55 Hz
3P = 1.35 Hz

2007-2008 17
Reduced response to loading
DAF
1
f0
Alleviation of (wind) loading by shedding loads through motion
soft-softstructure
Typical rotor loadingfrequencies
1P 3PTypical wave loading
frequencies

2007-2008 18
Increased response to loading
1-P *-P
Quasi-static or amplified response to wave loading

2007-2008 19
Single degree of freedom system
xk ⋅+
k
xc &⋅+
c
xmF &&⋅=
m
F
x

2007-2008 20
Wind turbine characteristics
• Stiffness• Material properties / soil properties• Buoyancy of a floating structure
• Damping• Material properties / soil properties• Aerodynamic loading• Control• (Viscosity of water / radiation in soil)
• Inertia• Material properties• Hydrodynamic loading (water added mass)• Entrained water mass

2007-2008 21
Linear / non-linear systems
x(t) y(t)
a·x1(t) + b·x2(t) a·y1(t) + b·y2(t)
Linear system:
Non-linear system:
x(t) + x0 y(t) + y0Initial condition x0:
• No superposition possible• Possible dependency on initial conditions• Possible variation in output statistics for the same input (statistics)

2007-2008 22
Non-linearities for wind turbines
• Aerodynamic loading
• Hydrodynamic loading
• extreme waves
• waves and currents
• Speed and pitch control
• some algorithms
• settings for various wind speeds
• Extreme deformations (2nd order effects)

2007-2008
23
IntroductionLoads, dynamics and structural design

2007-2008 24
Lifelong response signal
Response(loading + dynamics)
Time �
Extreme events
Lifelong variations

2007-2008 25
Effects of loads and dynamics
• Ultimate limit state (ULS)(maximum load carrying resistance)
• Yield and buckling
• Loss of bearing / overturning
• Failure of critical components
• Fatigue limit state (FLS)(effect of cyclic loading)
• Repeated wind and wave loading
• Repeated gravity loading on blade

2007-2008 26
Effects of loads and dynamics
• Accidental limit state (ALS)(accidental event or operational failure, local damage or large displacements allowed)
• Ship impact
• Serviceability limit state (SLS)(deformations/motion, tolerance for normal use)
• Blade tip tower clearance
• Vibrations that may damage equipment
• Tilt of turbine due to differential settlement

2007-2008 27
Design drivers of wind turbinesComponent Design drivers
Ultimate Fatigue
Tower top top mass -
Tower - wind/wave
Submerged wind/wave/current wind/wavetower
Foundation wind/wave/current -

2007-2008 28
Importance of dynamics in design
• Increase or decrease of maximum load
• Affects Ultimate Limit State conditions
• Increase or decrease of number of load cycles and their amplitudes
• Affects Fatigue Limit State / Lifetime

2007-2008 29
Effect on structural design
Monopilesoft-soft
Monopilesoft-stiff
Support structure costSoft-stiff monopile≈ 100 % Soft-soft monopile≈ 80 %
Energy costSoft-stiff monopile≈ 100 % Soft-soft monopile≈ 95 %

2007-2008 30
Use of dynamic models
Analyse system properties
Avoid resonance and instabilities
Assess lifelong loading
Reduce internal loads and match resistance
Make lightest and cheapest structural design
1. 2. 3.
Validate reliability and technical lifetime

2007-2008
31
Modelling of offshore wind turbines
Structural models of rotor, nacelle and support structure

2007-2008 32
Flexibility of wind turbines
Drive train - Torsion
Blades - Flapwise bending- Edgewise bending- Torsion
Tower - Bending- Torsion
Rotor - Rotation
Foundation- Rotation- Horizontal- Vertical

2007-2008 33
Integrated dynamic model
Wind
Wave
Grid
Controllers
Rotor Drive train Generator
Offshore wind turbine
Support structure

2007-2008 34
Rotor model
Aerodynamic properties
Distributed mass-stiffness
Beam theoryFEM
µ, EIx,y,pTablesCl – αCd – α

2007-2008 35
Drive train model
Ihub+low speed shaft
Igenerator
Stiffness torsion in transmission and main shaft; main shaft bending
Damping transmission suspension and generator torque control
Transmission ratio

2007-2008 36
Generator model
n0
generator
motor
00
Tk,g
n
synchronous generator:
n0 2n0
induction generator:
Tk,g
0 0
generator
motor
n
Slip

2007-2008 37
Tower model
Distributed mass-stiffness
Beam theoryFEM
µ, EIx,y,p
Modal representation
Deflection 1st mode
+
Deflection 2nd mode
=
“Total”deformation
Effective reduction of DOFs

2007-2008 38
Foundation model
⋅
=
θθθθ
θ u
kk
kk
M
H
x
xxx

2007-2008
39
Modelling of offshore wind turbinesDeriving parameters for foundation models

2007-2008 40
Importance of foundation model40
.0m
5.0m
15.0
m21
.0m
3500
Ø x
75
250
0Øx
100
2800
Ø x
60
280
0Ø x
32
280
0Ø x
25
2800
Ø x
20
37.0m
(25.0m Penetration)
3.0m
6.0m
280
0Ø x
60
15.4m
12.0m
12.0m
12.0m
6.0m
Pile
Tower
Flange
Boat Landing
J-Tube
MSL
x 30
3.0m
3.5m
5.0m
Scour Protection
4.6m
x10
0
Rotor/nacelle mass 130,000 kg
First natural frequency (Hz)without foundation 0.34627with foundation 0.29055with scour 0.28219
Second natural frequency (Hz)without foundation 2.2006with foundation 1.3328with scour 1.2508

2007-2008 41
Enhanced foundation model
External shaft friction(t-z curves)
Internal shaft friction(t-z curves)
Pile plug resistence(Q-z curves)
Pile point resistance(Q-z curves)
Lateral resistance(p-y curves)
Use:Standards (API/DNV)Existing software(In exercise: ANSYS Macro’s)

2007-2008 42
Scour
General scour depth
Local scour depth
Overburden reduction depth
No scour condition
General scour only
Local scour condition
Vertical effective soil pressure0
Pile
Seabed
Typically 6 times pile diameter
Typically 1-1.5 times pile diameter

2007-2008 43
Effective fixity length
Seabed
Effective fixity
length
3.3 D – 3.7 DExperience with offshore turbines
6 DGeneral calculations
7 D – 8 DVery soft silt
3.5 D – 4.5 DStiff clay
Effective fixity length
Configuration

2007-2008 44
Uncoupled springs
Tower
Seabed
Rotation
Translations
Forced displacement/rotation
Ignore M Ignore F
Method A
θF M
u
Ignore θ
Applied force/moment
Ignore uMethod B
θF M
u
In exercise: Use ANSYS Macro’s and method B for a monopile

2007-2008 45
Stiffness matrix
Stiffness matrix
Seabed
Tower
Run two load cases with FEM model with py-curves(See next slide)
⋅
=
θθθθ
θ u
kk
kk
M
H
x
xxx

2007-2008 46
FEM-based pile-head stiffness
4. Check assumption with another FEM solution
111 θθ ⋅+⋅= xxx kukF
111 θθθθ ⋅+⋅= kukM x
1. Solve FEM for F1, M1
(F1, M1 near loading situation of interest)
222 θθ ⋅+⋅= xxx kukF
222 θθθθ ⋅+⋅= kukM x
2. Solve FEM for F2, M2
(F2, M2 near loading situation of interest)
3. Scratch one equation and solve kxx, kxθ, kθθ(kθx = kxθ, assume matrix equal for both loads)

2007-2008 47
Selection of pile foundation models
• Foundation flexibility significant enough to require close consideration of modelling
• Effective fixity length model dissuaded
• Stiffness matrix much more favourable than uncoupled springsFor exercise: Monopile in Bladed modeled with uncoupled springs (unfortunately)

2007-2008 48
Vertical
Horizontal
Rocking
InertiaViscous damping
Spring stiffness
( )ν−⋅⋅13
3DG
( )ν
ν87
116
−−⋅⋅ DG
ν−⋅
1
2 DG
( )νρ−⋅
⋅⋅132
65.04 GD
( )νρ−⋅
⋅⋅24
6.42 GD
( )νρ−⋅
⋅⋅14
4.32 GD
( )νρ
−⋅⋅132
64.05D
( )νρ
−⋅⋅28
76.03D
( )νρ
−⋅⋅18
08.13D
GBSLumped springs and dashpots for:- Horizontal- Vertical- Rocking
Documented GBS model parameters

2007-2008
49
Types of analysis and toolsNatural frequency and mode analysis

2007-2008 50
FEM modal analysis
FEM analysis provides:
• Natural frequencies
• Mode shapes
• (Pre-processed) matrices of structural properties:
• Mass
• Stiffness
• Damping
1
XYZ
Parametric support structure model generation

2007-2008 51
Natural frequencies
0
0.5
1
1.5
2
2.5
3
3.5
Monopile Monopod Tripod Truss
Nat
ura
l fre
qu
enci
es

2007-2008 52
Modes of the support structure
Monopile 1st mode 2nd mode

2007-2008 53
Rayleigh's method
=
Z Velocity:
Maximumstrain energy
2ˆ~ Z
( )2max ˆ2
1
:
xkV
SDOF
=
Maximumkinetic energy
22ˆ~ ω⋅Z
( )( )
( )22
20max
ˆ2
12
1
:
xm
xmT
SDOF
ω=
= &
( ) ( ) ( )tZxtxv ωsinˆ, ⋅Ψ=

2007-2008 54
Rayleigh's method
• To estimate first natural frequency (lowest)
• Based on energy conservation in undamped, free vibration: Exchange of energy between motion and strain
• Mode shape must fit boundary conditions
• Best estimate of mode shape results in lowest estimate of natural frequency
• (Deflection under static top-load gives educated guess of mode shape)

2007-2008 55
Rayleigh’s method for stepped tower
( )2 322
2 4
44 48
3
top eq
found
eq
m m L LT C
EI
ππω π
+= ≈ ⋅ +
See document on Blackboard for:• Derivation of this equation• Explanation of EIeq, meq, Cfound

2007-2008 56
Free vibration of cylinder in water
( ) ( )cwcwDcMwM xvxvDCxDCaDCf &&&& −−⋅⋅+⋅⋅−−⋅⋅= ⊥⊥⊥ ,,2
,2
2
1
41
4ρπρπρ
Inertia force Drag force
Inertia force due to moving cylinder
• Still water � remaining inertia term is called ‘water added mass’
• With CM ≈ 2 � water added mass ≈mass of replaced waterBut related to water surroundingthe cylinder!
• Use water added mass in analysis of natural frequency and modes

2007-2008
57
Types of analysis and toolsResponse analysis

2007-2008 58
Types of response analysis
• Static analysis with dynamic response factors
• Time domain simulation
• Frequency domain analysis
• Mixtures
All approaches can also be divided in:
• Integrated combined loading
• Superposition of effect of load components (wind, wave, current, gravity)

2007-2008 59
Static + dynamic response factors
• Calculate static response for several loading conditions (separate wind, wave, g)
• Estimate a dynamic response factor per condition (comparison of characteristic frequencies) Typical 1.2-1.5
• Superimpose results (including partial safety factors per loading type)

2007-2008 60
Superposition of forces
SuperpositionWaves +current
Windon tower
ThrustGravity

2007-2008 61
Time domain simulation
• Generate realisations of external conditions
• Integrate equations of motion numerically
• Analyse response (extremes, probability distribution, fatigue, …)
• Repeat until statistically sound information is obtained
The tool used in the exercise to do this is ‘Bladed’.See Blackboard item ‘Assignments’ for a tutorial and manuals.

2007-2008 62
Frequency domain analysis
Fourier transforms and linear systems
Time domain Frequency domain
( ) ( ) ( )thtytx ,, ( ) ( ) ( )ωωω HYX ,,
( ) ( ) ( ) ( ) ( )*y t x h t d x t h tτ τ τ= ⋅ − =∫ ( ) ( ) ( )ωωω HXY ⋅=
( ) ( )( ) ( )tybtya
txbtxa
21
21
⋅+⋅→⋅+⋅ ( ) ( )
( ) ( )ωωωω
21
21
YbYa
XbXa
⋅+⋅→⋅+⋅

2007-2008 63
Frequency domain analysis
• Determine transfer function per load sourceLinearise system or use small harmonic loads
• Multiply spectrum of load source with transfer function
• Superimpose response spectra of different sources
Due to non-linearity in the system, this procedure must be
repeated for different average wind speeds

2007-2008 64
Time domain - frequency domain
Time domain Frequency domain
• Comprehensive non-linear structural model
• Simplified linear structural model
•Very time consuming • Very rapid calculation• Careful choice of time signal
• Well documented wind turbulence spectra
• Able to model control system dynamics
• Able only to model linear control system
• Established fatigue prediction tools
• Fatigue prediction tools relatively new

2007-2008 65
TD simulation:- Transfer function tower top
loading (linearisation)- Aerodynamic damping
FD analysis:- Transfer function for wind loading- Aerodynamic damping as extra
structural damping- Linear wave loading
+ ≈
Mixing time- and frequency domain

2007-2008 66
U(1-a)
Aerodynamic damping
Tower for-aft motion
Blade motion
Vblade
Angle of attackdecreases/increases
-Vblade
αLift/thrust force
diminishes/increases
δL
δL opposite Vblade

2007-2008 67
Aerodynamic damping
0
1
2
3
4
5
6
5 10 15 20 25
wind speed at hub height [m/s]
aero
dyn
. dam
pin
g a
s fr
ac. o
f cr
it.
dam
p. [
%]
soft-soft monopile
soft-stiff monotower
stiff-stiff lattice tower
Function of wind speed, turbine design (aerodynamic and control) and support structure!

2007-2008 68
Some relevant analysis tools
ANSYSSesamAdams WTPhatasBladedFlexTurbu
FEM Time Freq Rotor OffshoreXX X X XX X X XX X X XX X X XX X X XX X X X

2007-2008
69
Loads and dynamics in designOverview of the process

2007-2008 70
Suggested steps
• Choose a limited set of load cases
• Make preliminary design based on static loads
• Check for resonance*
• Check extreme loads with time domain simulations*
• Check fatigue damage*
* Adjust design when necessary

2007-2008 71
Partial safety factor method
• Apply load and resistance factors to:
• loads on the structure or load effects in the structure
• resistance of the structure or strength of materials
• Fulfill design criterion:
• Combined loading with non-linear effects:
• Apply one safety factor to combined load effect, determined from structural analysis of simultaneous loading
RS
RS
γγ ≤⋅

2007-2008 72
Values for safety factors
• Importance of structural component w.r.t. consequence of failure considered
• Typically between 0.7 and 1.35
• ≤ 1.0 for favourable loads!
• Load factor 1.0 for fatigue (safety in resistance)
• See e.g. Offshore standard DNV-OS-J101Design of offshore wind turbine structures

2007-2008
73
Loads and dynamics in designChoose load cases

2007-2008 74
Fundamental problems in evaluation
Response(loading + dynamics)
Time �
More realisationsat the same site
What is the true extreme?
Long time span (20 year)

2007-2008 75
Load cases: Combine conditions
extreme
normal
external conditions
stand-by
operational conditions
normal conditions
start-up
power production
normal shut-down
fault conditions
condition after occurrence of a fault
erection
The number of combinations that is required in the standards is enormous!

2007-2008 76
Reducing number of load cases (extremes)
Select a few independent extreme conditions that might be design driving, e.g.:
• Extreme loading during normal operation
• Extreme loading during failure
• Extreme wind loading above cut-out
• Extreme wave loading
And combine these with reduced conditions for the other aspects (wind, wave, current)

2007-2008 77
Reducing number of load cases (fatigue)
Hs \ \ Tz 0 - 1 1 - 2 2 - 3 3 - 4 4 - 5 5 - 6 6 - 7 7 - 8 8 - 9 total5.5 - 6 0.05 - 5.5 0.08 0.14.5 - 5 0.04 0.3 0.34 - 4.5 0.3 0.08 0.43.5 - 4 lumped sea state 0.7 0.73 - 3.5 0.7 0.72.5 - 3 0.6 0.04 0.72 - 2.5 0.2 0.21.5 - 2 0.01 - 1.5 3.4 0.4 3.80.5 - 1 19 58 0.7 77.70 - 0.5 0.68 1.0 65 12 0.1 0.11 79.0
total 0.7 0.0 1.0 84.2 73.4 2.0 1.9 0.5 0.0 164
Idling: Vw > Vcut_out
Idling: Vw < Vcut_in
Normal operation:Vcut_in < Vw < Vcut_out
Lump states in 3D scatter diagram
Use normal operation and idling

2007-2008 78
T
VVrated Vcut-out
‘Ideal’ pitch
Stall
Responseto gust/failure
Vextreme
~V2
~V-1
~V2
Knowledge about load case selection:Thrust curves

2007-2008 79
Extreme and reduced conditions
• Hmax ≈ 1.86 · Hs
• Hreduced ≈ 1.32 · Hs
• Vgust,max ≈ 1.2 · V10 min
• Vgust,reduced ≈ (1.2 / 1.1) · V10 min

2007-2008
80
Loads and dynamics in designMake preliminary design

2007-2008 81
Preliminary support structure design
• Determine largest loads at several heights• Estimate wind, wave, current and gravity loads
e.g. CD,AX = 8/9 (Betz) at Vrated & linear wave & DAF & safety
• Superimpose and determine largest at each height
• Dimension tower (moments / section modulus)
• Rule of thump D/t• 200 tower section
• ~60 driven foundation pile (see e.g. API on BB)
• Estimate pile size with Blum’s method(See document on Blackboard!)

2007-2008
82
Loads and dynamics in designCheck for resonance

2007-2008 83
Campbell diagram
‘forbidden’area
margin
Cha
ract
eris
tic fr
eque
ncy
Rotor speed
1e lead-lag
3-P
1-P
1e flap
1st tower frequency1st tower frequency 1st tower frequency
Soft-stiff
Soft-soft
Stiff-stiff
Wave-excitation
Soft-stiff
Soft-soft

2007-2008 84
Design adaptations
• Change diameters and/or wall thicknesses
• Shift massese.g. move transformer from nacelle to platform
• Adjust rotor speed controle.g. skip resonance in partial load region
• Change concepte.g. to braced tower / tripod

2007-2008
85
Loads and dynamics in designCheck lifetime fatigue

2007-2008 86
Fatigue
Fstatic
F
time
failure
σ
number of cycles
fatigue test
Fatigue: after a number of cycles of a varying load below static strengthfailure occurs.

2007-2008 87
S-N curves
log N
log σamp
UTS
1:20? Carbon-Epoxy
1:10
Glass-Polyester
Steel (Welded)
1:3

2007-2008 88
Variable amplitude loading
σamp
log N
n1
n2
n3
n4n5
N1
N2
N3N3
N4
N5
Miner’s Damage Rule:5
5
4
4
3
3
2
2
1
1
N
n
N
n
N
n
N
n
N
n
N
n
i
i ++++=∑
Damage < 1.0

2007-2008 89
Stochastic loadingStress history can be converted to blocks of constant amplitude loadings (using counting method)
σamp
log N
stress histogramσ
Time
Stress history
Information about sequence lost

2007-2008 90
Rainflow counting
• Two parametric method: Range and mean
• Display series of extremes with vertical time axis
• Drip ‘rain’ from each extreme, stop at a larger extreme
• Start and stop combine to one stress cycle

2007-2008 91
Rainflow counting
• Established method
• Several equivalent algorithms exist
• Reservoir method
• Intermediate extremes in groups of 4
• Principle based on stress-strain hysteresis loops:

2007-2008 92
Frequency domain approach
Rayleigh:Theoretical, narrow band signals:
Dirlik: Empirical, wide band signals:
Used for spectra of random, Gaussian, stationary processes

2007-2008 93
Lifetime fatigue analysisHs \ \ Tz 0 - 1 s 1 - 2 s 2 - 3 s 3 - 4 s 4 - 5 s 5 - 6 s 6 - 7 s 7 - 8 s 8 - 9 s total5.5 - 6 m 0.05 - 5.5 m 0.08 0.14.5 - 5 m Idling, high: Vw >= Vcut_out 0.04 0.3 0.34 - 4.5 m 0.3 0.08 0.43.5 - 4 m lumped sea state 0.7 0.73 - 3.5 m 0.7 0.72.5 - 3 m 0.6 0.04 0.72 - 2.5 m 0.2 0.21.5 - 2 m idling, low: Vw < Vcut_in 0.01 - 1.5 m 3.4 0.4 3.80.5 - 1 m 19 58 0.7 77.70 - 0.5 m 0.68 1.0 65 12 0.1 0.11 79.0total 0.7 0.0 1.0 84.2 73.4 2.0 1.9 0.5 0.0 164
Do the following for all load cases(scatter diagram, operational and idle)
σ
Time
Determine stress time series or PSD(PSD = Power Spectral Density)
Determine stress histogram(Rainflow counting – Dirlik)
σamp
log N

2007-2008 94
Lifetime fatigue analysisn1 N1Apply Miner’s rule to histogram
(damage per load case) σamp
log N
∑=i
i
N
nD
Apply Miner’s to all load cases:Damage of each load case (normalised to 1 unit of time) *
Probability of load case * Total lifetime
0.
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
Idle
,low
1
Idle
,low
2
Idle
,low
3
pro
d. 8
m/s
pro
d. 1
0 m
/s
pro
d. 1
4 m
/s
pro
d. 1
5 m
/s
pro
d. 1
7 m
/s
pro
d. 1
9 m
/s
pro
d. 2
0 m
/s
pro
d. 2
1 m
/s
Idle
, hig
h 1
Idle
, hig
h 2
Idle
, hig
h 3dam
age
for
load
cas
e w
ith
un
ity
pro
bab
ility
[-]
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
pro
bab
ility
of
load
cas
e [-
]PP wind & waves
II, IP: waves
PP: wind
PP: waves
probability
Load case typePile 5.5 m below mudline
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
Idle
,low
1
Idle
,low
2
Idle
,low
3
pro
d. 8
m/s
pro
d. 1
0 m
/s
pro
d. 1
4 m
/s
pro
d. 1
5 m
/s
pro
d. 1
7 m
/s
pro
d. 1
9 m
/s
pro
d. 2
0 m
/s
pro
d. 2
1 m
/s
Idle
, hig
h 1
Idle
, hig
h 2
Idle
, hig
h 3
(ab
solu
te)
dam
age
per
load
cas
e [-
]
No.1: wind & waves (full avail.)
No. 2: waves & no aerodyn. damping
No. 4: pure wind
No. 5: waves & aerodyn. damping
Fatigue analysis typePile 5.5 m below mudline

2007-2008 95
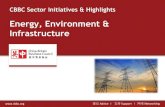
Integrated system dynamics
0
10
20
30
40
50
Equ
ival
ent b
endi
ng m
omen
t
wind
wave
windloading
waveloading
super-position
separate analyse
combinedloading
integratedanalysis
combined