Positioning Based on GPS Pseudoranges - The Danish GPS Center

ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 1
ΣΥΣΤΗΜΑΤΑ ΤΗΛΕΜΑΤΙΚΗΣ ΜΕ ΧΡΗΣΗ GPS
ΓΙΑ Μ.Μ.Μ. & ΠΡΟΤΥΠΑ ΠΡΟΒΛΕΨΗΣ
ΣΕ ΠΡΑΓΜΑΤΙΚΟ ΧΡΟΝΟ
ΕΚΤΕΤΑΜΕΝΗ ΠΕΡΙΛΗΨΗ ΜΕΤΑΠΤΥΧΙΑΚΗΣ ΕΡΓΑΣΙΑΣ
ΝΙΚΟΛΑΟΣ Γ. ΔΑΣΚΑΛΑΚΗΣ Πολιτικός Μηχανικός – Master GIS, ΕΜΠ
Επιβλέπων: Καθηγητής Bασίλης Ψαριανός
Τριμελής Επιτροπή: Βασίλης Ψαριανός, Καθηγητής Μάριος Κονταράτος, Επίκουρος Καθηγητής Μαρία Τσακίρη, Επίκουρη Καθηγήτρια Εργαστήριο Συγκοινωνιακής Τεχνικής
Η παρούσα εκτεταμένη περίληψη Μεταπτυχιακής Εργασίας αναφέρεται στο αντικείμε-
νο των συγκοινωνιών, ως χωρικές και χρονικές λειτουργίες στις πόλεις. Σημειώνονται οι
υφιστάμενες ανάγκες για κινητικότητα, ιδιαιτέρως σε αστικό περιβάλλον και επισημαίνο-
νται οι μελλοντικές προοπτικές τους. Διαπιστώνεται ότι τα ΜΜΜ μπορούν να οδηγήσουν
σε βιώσιμη συγκοινωνιακή ανάπτυξη, υπό την προϋπόθεση σχεδιασμού, βάσει αντίστοι-
χων πολεοδομικών μελετών και συγκοινωνιακού σχεδιασμού. Προτείνεται η εφαρμογή
ποιοτικών μέτρων προς τους χρήστες ΜΜΜ, όπως η παροχή άμεσης πληροφόρησης μέσω
Τηλεματικής. Αναπτύσσεται πρότυπο βασιζόμενο σε φίλτρο Kalman για την πρόβλεψη
άφιξης οχημάτων, σε πραγματικό χρόνο, με δεδομένα από GPS των οχημάτων. Στο
πρότυπο αυτό εισάγονται πραγματικά δεδομένα από δρομολόγια δημόσιας συγκοινωνίας
στην Αθήνα και από την ακόλουθη ανάλυση προκύπτει ότι το συγκεκριμένο πρότυπο
μπορεί να λειτουργήσει αποτελεσματικά για χρήση από το μεταφορικό φορέα για την
παροχή ποιοτικότερων υπηρεσιών προς το επιβατικό κοινό.
Λέξεις κλειδιά: Μέσα Μαζικής Μεταφοράς, Τηλεματική, Προηγμένα Συστήματα Μεταφορών, Αυτόματος Εντοπισμός Οχήματος,
Ευφυή Συστήματα στις Μεταφορές, Φίλτρο Kalman, Πρόβλεψη Άφιξης σε Πραγματικό Χρόνο

2 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 3
ΠΕΡΙΕΧΟΜΕΝΑ
Εισαγωγή – Περίληψη
1. Ταυτότητα Εργασίας 2. Σκοπός
3. Ανάπτυξη
Κεφάλαιο 1 – Μετακινήσεις
1Α. Ιστορικά Στοιχεία 1Β. Ωφέλειες από την Ανάπτυξη Δημόσιας Συγκοινωνίας
Κεφάλαιο 2 – Ανάπτυξη Προτύπου Πρόβλεψης
2Α. Παρούσα Κατάσταση 2Β. Βελτιστοποίηση μέσω δυναμικής επέμβασης 2Γ. Πρόβλεψη μέσω Συστημάτων Εντοπισμού 2Δ. Ροή Δεδομένων 2Ε. Παραδοχές 2ΣΤ.Tμήμα Πρόβλεψης 2Ζ. Ανάπτυξη Προτύπου 2Η. Αλγόριθμος Πρόβλεψης φίλτρου Kalman 2Θ. Λειτουργία Αλγόριθμου 2Ι. Παράδειγμα Εφαρμογής Αλγόριθμου Πρόβλεψης με Χρήση Φίλτρου Kalman 2ΙΑ.Αποτίμηση Επίδοσης Προτύπου 2ΙΒ.Αποτελέσματα 2ΙΓ.Συμπεράσματα
Κεφάλαιο 3 – Σύστημα Τηλεματικής Η.Λ.Π.Α.Π.
3Α. Α.Σ.Ε.Ο. Η.Λ.Π.Α.Π 3Β. Δυνατότητες Συστήματος 3Γ. Τμήματα Συστήματος & Λειτουργίες
Κεφάλαιο 4 – Εφαρμογή σε Πραγματικές Συνθήκες
4Α. Σχεδιασμός Μετρήσεων 4Β. Μετρήσεις 4Γ. Αποτελέσματα
Κεφάλαιο 5
5Α.– Συμπεράσματα 5Β.– Προτάσεις για περαιτέρω έρευνα
ΑΝΑΦΟΡΕΣ – ΠΗΓΕΣ

2 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 3
ΕΙΣΑΓΩΓΗ
1. – ΤΑΥΤΟΤΗΤΑ ΕΡΓΑΣΙΑΣ
Η παρούσα αποτελεί εκτενή περίληψη της Μεταπτυχιακής Εργασίας για το Διατμημα-
τικό Πρόγραμμα Μεταπτυχιακών Σπουδών «Γεωπληροφορική», Σχολής Αγρονόμων και
Τοπογράφων Μηχανικών του Ε.Μ.Π. Η εκπόνησή της έγινε υπό την επίβλεψη και την
στήριξη του Καθηγητή κ. Βασίλειου Ψαριανού, στο Εργαστήριο Συγκοινωνιακής Τε-
χνικής του Τομέα Έργων Υποδομής & Αγροτικής Ανάπτυξης, ενώ βοήθησαν και οι Τάκης
Δρογώσης με το προσωπικό του Κέντρο Τηλεματικής από πλευράς Η.Λ.Π.Α.Π. Α.Ε.,
Ηλίας Γκάγκας και Νίκος Γουρδούμισας της Wackenhut TelematiΧ Α.Ε. Όλους τους
παραπάνω ευχαριστώ θερμά.
2.– ΣΚΟΠΟΣ
Η τεκμηρίωση και υποστήριξη ενός συστήματος πρόβλεψης του χρόνου άφιξης ΜΜΜ
σε πραγματικό χρόνο, αποτελεί σκοπό της εργασίας αυτής. Περιγράφονται συστήματα
Τηλεματικής ως τμήμα ολοκληρωμένης και τεχνολογικά προηγμένης συγκοινω-
νιακής υποδομής, η οποία καλείται να ανταποκριθεί στις απαιτήσεις των σύγχρονων
αστικών μετακινήσεων για μια βιώσιμη συγκοινωνιακή ανάπτυξη. Χρήσεις εφαρμογών
ITS αποτελούν: η εποπτεία του στόλου και κάθε διορθωτική επέμβαση του φορέα δια-
χείρισης στα δρομολόγια, είτε εκ των προτέρων, είτε σε πραγματικό χρόνο, καθώς και η
ενημέρωση-πληροφόρηση του επιβατικού κοινού, μέσω τηλεπικοινωνιών, εντός οχημά-
των και στις στάσεις κατά την αναμονή. Προτείνεται η υλοποίηση και η χρήση αλγόριθ-
μου πρόβλεψης χρόνου άφιξης ΜΜΜ σε πραγματικό χρόνο.
3.– ΑΝΑΠΤΥΞΗ
Αναπτύσσονται παραδείγματα από μαθηματικά πρότυπα , τα οποία χρησιμοποιού-
νται σε εφαρμογές πραγματικού χρόνου και εξετάζεται η εφαρμογή προτύπου με φίλ-
τρο Kalman για την πρόβλεψη χρόνου άφιξης στη στάση, οχημάτων ΜΜΜ. Περι-
γράφεται η διαδικασία μετρήσεων από διαδρομές με οχήματα των ΗΛΠΑΠ, εξοπλισμένα
με σύστημα GPS, το οποίο αποτελεί το κύριο μέσον εντοπισμού για πλήθος ανάλογων

4 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 5
εφαρμογών. Με τα δεδομένα αυτά πραγματοποιείται προσομοίωση και κατόπιν αποτίμη-
ση της αποτελεσματικότητας του προτύπου, όπως αυτό εφαρμόστηκε για την πρόβλεψη
Χρόνων Διαδρομής σε συγκεκριμένες συνθήκες μετρήσεων.
ΚΕΦΑΛΑΙΟ 1– ΜΕΤΑΚΙΝΗΣΕΙΣ
1Α. – Ιστορικά Στοιχεία
Η ανάγκη για ατομική κινητικότητα υπήρχε ανέκαθεν. Με οποιοδήποτε μεταφορικό μέ-
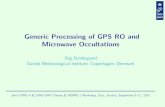
σον, ένα κομμάτι της ζωής διατίθεται για μετακινήσεις. Σχετική έρευνα, βάσει στοιχείων
των τελευταίων 30 ετών, έδειξε ότι στη Βρετανία π.χ., κατά μέσον όρο, ο καθένας αφι-
ερώνει 360, περίπου, ώρες ανά έτος για μετακινήσεις. [1-1]. Έχει, επίσης, διαπιστωθεί
ότι, παρά την ύπαρξη διαφορετικών κινήτρων, μέσων, κόστους και διαδρομών μεταφο-
ράς, ο μέσος χρόνος μετακίνησης του ανθρώπου παραμένει σταθερός, περίπου
1,1h ανά ημέρα, κατά μέσο όρο [Εικόνα 1.1].
Εικόνα 1.1: Μέσος όρος ωρών μετακίνησης ανά άτομο ανά έτος (εθνική έρευνα στη Βρετανία). Παρά την φανερή μεγέθυνση των ατομικών μετακινήσεων τα τελευταία 30 χρόνια, ο διατιθέμενος χρόνος για μετακίνηση ανά ημέρα παραμένει σταθερός. Πηγή: [1-1]
Μια πόλη, από τη συγκοινωνιακή σκοπιά του θέματος, μπορεί να θεωρηθεί ως απειρία
σημείων, τα οποία έλκουν μετακινήσεις [1-2]. Στο καθένα από αυτά επιτελείται μια
λειτουργία, η οποία το καθιστά πόλο προσέλκυσης ή παραγωγής μετακινήσεων. Οι ροές
αυτές εξυπηρετούνται, μέσω των υποδομών της πόλης, με τρόπους μετακίνησης, οι
οποίοι διεξάγονται είτε με κάποιο μέσον είτε πεζή.

4 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 5
1Β. – Ωφέλη από Ανάπτυξη Δημόσιας Συγκοινωνίας
Σύμφωνα με σύγχρονες αντιλήψεις για τις βιώσιμες πόλεις, θεωρείται ότι η ανάπτυξη
Δημοσίων Συγκοινωνιών θα έχει ως συνέπειες [1-3]: Πόλεις φιλόξενες, οικείες και αντι-
μετώπιση κορεσμού. Πιο δυναμικές, λιγότερο θορυβώδεις και με καθαρότερη ατμόσφαι-
ρα, κοινωνικά δικαιότερες και με συγκρατημένο ρυθμό επέκτασης πόλεις.
ΚΕ Φ Α Λ Α Ι Ο 2 – ΑΝΑΠΤΥΞΗ ΠΡΟΤΥΠΟΥ ΠΡΟΒΛΕΨΗΣ
2Α. – Παρούσα Κατάσταση
Στο αθηναϊκό σύστημα ελέγχου κυκλοφορίας λεωφορείων και τρόλεϊ, σήμερα, έμπει-
ροι επόπτες γραμμών, χειροκίνητα, προσαρμόζουν, σε σταθερή βάση, τη ροή των οχη-
μάτων. Παρακάτω αναπτύσσεται αλγόριθμος πρόβλεψης της ώρας άφιξης του επόμενου
οχήματος, σε συγκεκριμένη στάση, και του χρόνου διαδρομής μεταξύ διαδοχικών στάσε-
ων, κατά τη φορά κίνησης του οχήματος.
2Β. – Βελτιστοποίηση μέσω δυναμικής επέμβασης
Το 1957, αναπτύχθηκε μια σχέση για να εκτιμήσει το μέσο χρόνο αναμονής για μια
μεταφορική διαδρομή, θεωρώντας στοχαστικές (τυχαίες) αφίξεις επιβατών και οχημάτων
στις στάσεις [2-1].
)(2
)(
2
)()(
2
hE
hhEWE
��� (1)
όπου: E(W) είναι ο Μέσος Χρόνος Αναμονής
E(h), Μέσος Χρόνος Μεταξύ Διαδοχικών Αφίξεων ΧΜΑ[=Headway]
σ2 (h), η διασπορά του ΧΜΑ.
Στη σχέση (1) ο όρος E(h) μπορεί να τεθεί ως ο προγραμματισμένος ΧΜΑ. Έτσι, ο
μέσος χρόνος αναμονής επιβατών μπορεί να μειωθεί, ώστε η διασπορά του ΧΜΑ, σ2 (h)
να ελαχιστοποιείται.
Συμπερασματικά, η αναξιοπιστία και η βέλτιστη εκμετάλλευση της υποδομής ενός

6 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 7
φορέα, ως προς την ελαχιστοποίηση αναμονής επιβατικού κοινού, επιτυγχάνεται μέσω
μεθόδων και τεχνικών δυναμικής επέμβασης, τα οποία προσαρμόζονται ανάλογα στο
εκάστοτε δίκτυο και τη διατιθέμενη τεχνολογική ανάπτυξη.
2Γ. – Πρόβλεψη μέσω Συστημάτων Εντοπισμού
Ένας τυπικός αλγόριθμος πρόβλεψης κάνει χρήση τόσο «Στατικών Πληροφοριών»
όσο και «Δυναμικών Πληροφοριών» [2-2]. «Στατικές» είναι εκείνες οι πληροφορίες οι
οποίες αναφέρονται σε στοιχεία, βάσει προγραμματισμού, ιστορικό κυκλοφοριακών συν-
θηκών και μέσους χρόνους άφιξης σε κάθε στάση. «Δυναμικές» είναι οι πληροφορίες,
οι οποίες λαμβάνουν στοιχεία σε πραγματικό χρόνο για τη θέση του οχήματος, καθυστε-
ρήσεις σε στάσεις, καιρικές και υπάρχουσες κυκλοφοριακές συνθήκες.
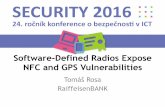
2Δ. – Ροή Δεδομένων
Στην Εικόνα 2.1 παρουσιάζεται το λογικό διάγραμμα παρακολούθησης σε πραγματικό
χρόνο της λειτουργίας μιας γραμμής.
Εικόνα 2.1. Σχεδιάγραμμα λειτουργίας δυναμικού συστήματος για τον στρατηγικό έλεγχο σε πραγματικό χρόνο. Πηγή: [2-3]

6 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 7
Τα δεδομένα για τη μελέτη ενός συστήματος, όπως αυτό το οποίο πρόκειται να μελε-
τηθεί, συλλέγονται από το σύστημα GPS, το οποίο χρησιμοποιείται στα οχήματα μιας εκ
των γραμμών τρόλεϊ.
2Ε . – Παραδοχές
Κάθε αλγόριθμος υπόκειται σε βασικές παραδοχές οι οποίες επιδρούν στα αποτελέσμα-
τα. Οι βασικές παραδοχές οι οποίες ακολουθούνται κατά την παρακάτω προσέγγιση
είναι:
1. Η γνώση της θέσης του κάθε οχήματος ανανεώνεται σε μη τακτικό ρυθμό, περίπου
κάθε 20-30 sec.
2. Κάθε χρονοδιάγραμμα αποτελεί απεικόνιση της στοχαστικής διαδικασίας της κίνη-
σης του οχήματος κατά μήκος της διαδρομής
3. Η στοχαστική διαδικασία αναπαρίσταται από το σύνολο των απεικονίσεων
4. Τα οχήματα προτυποποιούνται ως κινούμενα με σταθερή ταχύτητα (τη μέση ταχύ-
τητα διαδρομής) κατά τα διαστήματα των αποστάσεων
5. Τόσο η κίνηση, όσο και η στάση των οχημάτων περιλαμβάνονται στη διακύμανση
του πρότυπου διαδικασίας
6. Η διακύμανση πρότυπου διαδικασίας ακολουθεί κανονική κατανομή
7. Υφίστανται γνωστά σφάλματα κατά τη μέτρηση της θέσης των οχημάτων.
Οι παραδοχές αυτές επιτρέπουν τη μορφοποίηση του προβλήματος εντός στατιστικού
πλαισίου, ώστε να πληρούνται οι απαραίτητες συνθήκες για την εφαρμογή του φίλτρου
Kalman. Έτσι, θα προκύψουν οι βέλτιστες εκτιμήσεις του προβλεπόμενου χρόνου μέχρι
την άφιξη για μεμονωμένα οχήματα.
2ΣΤ. – Τμήμα Πρόβλεψης
Παρακάτω παρουσιάζεται παράδειγμα αλγορίθμου, το οποίο χρησιμοποιείται ως τμήμα
συστήματος εντοπισμού και πρόβλεψης χρόνου άφιξης οχημάτων [2-4]. Το τμήμα του
εντοπισμού χρησιμοποιεί φίλτρο Kalman, το οποίο βασίζεται σε μητρώα, τα οποία με-
τασχηματίζουν γραμμικά τις πρότερες εκτιμήσεις με τη ζυγισμένη διαφορά μεταξύ

8 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 9
των πραγματικών και των προβλεπόμενων μετρήσεων (σφάλμα φίλτρου)[2-5].
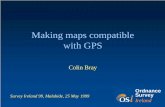
Το βασικό στάδιο του αλγόριθμου περιλαμβάνει το τμήμα πρόβλεψης [Εικ. 2.2]. Αυτό
χρησιμοποιεί 3 μέρη πληροφοριών, ώστε να υπολογίσει το χρόνο άφιξης: 1)τον ‘ως τώρα’
χρόνο διαδρομής, 2)την εκτίμηση χρόνου διαδρομής ‘μέχρι τον προορισμό’ και 3)τη συ-
νάρτηση χρόνου διαδρομής για τη γραμμή, στην οποία δρομολογείται το συγκεκριμένο
όχημα. Μετά από το βήμα του φίλτρου Kalman, υφίσταται ένα μέτρο των δύο πρώτων
μεγεθών, του χρόνου και της απόστασης, μέχρι τον προορισμό. Το ακόλουθο βήμα είναι
ο υπολογισμός της χρονικής συνάρτησης από το τρέχον σημείο μέχρι τον προορισμό.
Εικόνα 2.2. Σχηματική υλοποίηση αλγόριθμου για τον εντοπισμό θέσης και την πρόβλεψη άφιξης λεωφορείου στον προορισμό. Πηγή: [2-4]
2Ζ. – Ανάπτυξη Προτύπου
Το εξεταζόμενο πρότυπο αφορά μόνο σε δεδομένα, από δεδομένα GPS, και για τις
προβλέψεις βασίζεται σε έναν κύριο αλγόριθμο, ο οποίος βασίζεται στο φίλτρο Kalman,
το οποίο η διεθνής εμπειρία έχει σχετικά καταξιώσει [2-6], [2-7]. Η Εικόνα 2.3
περιγράφει σχηματικά τη διαδρομή ενός λεωφορείου ή τρόλεϊ για μια υποθετική γραμμή
ΜΜΜ. Η διαδρομή αποτελείται από συνηθισμένες στάσεις, οι οποίες ανά ομάδες συνε-
χόμενων απαρτίζουν ένα τμήμα. Στα άκρα του τμήματος βρίσκονται οι στάσεις ελέγχου
(check points), οι οποίες απεικονίζονται στην Εικόνα 2.3. Κατά τη στιγμή την οποία ένα
όχημα αναχωρεί από τη στάση ελέγχου i, η πραγματική χρονική στιγμή αναχώρησης γί-
νεται γνωστή από το σύστημα AVL. Κατ’ αυτή τη στιγμή, ο αλγόριθμος φίλτρου Kalman,
προβλέπει το χρόνο κίνησης για το επόμενο τμήμα μέχρι τη στάση i+1. Ο χρόνος αυτός
συμβολίζεται με ΧΚn(i,i+1), δηλαδή, Χρόνος Κίνησης n μεταξύ των στάσεων i και i+1. Προ-
βλέποντας τον χρόνο αυτό, μπορεί να προσδιοριστεί η ώρα άφιξης στη στάση i+1.

8 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 9
������� ������ i i+1 i+2 ... … i+n ������� �������
������ 2.3. �������� �������� ������ ������� �������.������ ��� i, i+1, ���,
����������� �������� ��� ����� ������������ �������.
����������� ��� �� ����� n ��������� ��� ������ ������� ������ ��� ����� i.
ATn (i+1) = DTn (i) +RTn (i,i+1) (1)
����: ATn (i+1) � ������������� ������ ������ ��� �������� n ��� ����� i+1
RTn (i,i+1) � ������������� ������ ��������� ��� �������� ������ ��� ������� i ���
i+1 ��� ��� ��������� ��������� ������� Kalman
DTn (i) � ����������� ������ ���������� ��� �������� ��� �� ����� i
����� � ������������� ������ ������ ATn (i+1) ��������������� ��� �� �������
������, ���� �� ���������� � ������ ��������� ��� �����, ��� ���������� n ���
����� i+1, ����������� ��� ����� ������ �������� ��� ��� ����� ������
���������� ��� ����� i+1.
DWTn (i+1) = �(i+1)*[ATn (i+1) - ATn-1 (i+1)]*�avg(i+1) (2)
����: DWTn (i+1 � ������������� ������ ������ ��� �� ��������� n ��� ����� i+1
�(i+1) � ������������� ������ ������ ��� ����� i+1 ��� ��� ���������
��������� ��� �� ������ Kalman.
ATn-1 (i+1) � ����������� ������ ������ ��� ����� i+1 ��� �� ����� n-1
ATn (i+1) � ����������� ������ ������ ��� ����� i+1 ��� �� ����� n
ATn (i+1) - ATn-1 (i+1) � ������������� ��� ����� i+1 ������ ��� ��������
n-1 ��� n
�avg(i+1) � ����� ������ ���������� ��� ����� i+1, � ������ ���������� ����
�� 2,5sec/�������
���� ������� (2), � ������� ����� ��� �� �������������� �������� �� ���� �����
���������� ��������� ��� ����� ������, ������������� �� ���� ���������������
��������. ������� �� ����� ������ ��� ������ ��� �� ����� n ��� ����� i+1 �����
������ �� ����������� � ������������� ������ ���������� ��� ���������� n ���
����� i+1 ������������ ���� �����, ��� ����� ������ DWTn (i+1) ��� ����� i+1.
DTn (i+1) = ATn (i+1) + DWTn (i+1) (3)
����: DTn (i+1) � ������������� ������ ���������� ��� �� ����� n ��� ����� i+1
Εικόνα 2.3. Διαδρομή οχήματος μεταξύ στάσεων ελέγχου. Μεταξύ των i, i+1, κτλ, ενδεχομένως υπάρχουν και άλλες συνηθισμένες στάσεις.
Υποθέτοντας ότι το όχημα n βρίσκεται την αρχική χρονική στιγμή στη στάση i.
ATn (i+1) = DTn (i) +RTn (i,i+1) (1)
όπου: ATn (i+1) ο προβλεπόμενος χρόνος άφιξης του οχήματος n στη στάση i+1
RTn (i,i+1) ο προβλεπόμενος χρόνος διαδρομής του οχήματος μεταξύ των στάσεων i και
i+1 από τον αλγόριθμο πρόβλεψης φίλτρου Kalman
DTn (i) ο πραγματικός χρόνος αναχώρησης του οχήματος από τη στάση i
Αυτός ο προβλεπόμενος χρόνος άφιξης ATn (i+1) χρησιμοποιείται και σε επόμενο στάδιο,
ώστε να προβλεφθεί ο χρόνος παραμονής στη στάση, του λεωφορείου n στη στάση i+1, βα-
σιζόμενοι στον ρυθμό άφιξης επιβατών και του μέσου χρόνου επιβίβασης στη στάση i+1.
DWTn (i+1) = λ(i+1)*[ATn (i+1) - ATn-1 (i+1)]*ρavg(i+1) (2)
όπου: DWTn (i+1 ο προβλεπόμενος χρόνος στάσης για το λεωφορείο n στη στάση i+1
λ(i+1) ο προβλεπόμενος ρυθμός άφιξης στη στάση i+1 από τον αλγόριθμο
πρόβλεψης από το φίλτρο Kalman.
ATn-1 (i+1) ο πραγματικός χρόνος άφιξης στη στάση i+1 για το όχημα n-1
ATn (i+1) ο πραγματικός χρόνος άφιξης στη στάση i+1 για το όχημα n
ATn (i+1) - ATn-1 (i+1) η χρονοαπόσταση στη στάση i+1 μεταξύ των οχημάτων n-1 και n
ρavg(i+1) ο μέσος ρυθμός επιβίβασης στη στάση i+1, ο οποίος υποτίθεται ίσος με 2,5sec/
επιβάτη.
Στην εξίσωση (2), η υπόθεση είναι ότι οι επιβιβαζόμενοι επιβάτες, σε κάθε στάση,
επηρεάζουν σημαντικά τον χρόνο στάσης, συγκρινόμενοι με τους αποβιβαζόμενους επι-
βάτες. Έχοντας τον χρόνο άφιξης και στάσης για το όχημα n στη στάση i+1 είναι εύκολο
να υπολογιστεί ο προβλεπόμενος χρόνος αναχώρησης του λεωφορείου n στη στάση i+1
προσθέτοντας στον πρώτο, τον χρόνο στάσης DWTn (i+1) στη στάση i+1.
DTn (i+1) = ATn (i+1) + DWTn (i+1) (3)
όπου: DTn (i+1) ο προβλεπόμενος χρόνος αναχώρησης για το όχημα n στη στάση i+1

10 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 11
Ο χρόνος αυτός αναχώρησης DTn (i+1) είναι μια συνάρτηση των προβλέψεων αφ’ ενός
χρόνου άφιξης και αφ’ ετέρου του χρόνου στάσης στη στάση i+1. Κατ’ αυτόν τον τρόπο η
επιρροή διακυμάνσεων, κατά τη λειτουργία της γραμμής, δηλαδή, αργοπορία ή προπορία,
μπορεί να διαπιστωθεί σε αυτή τη στάση και θα αντικατοπτριστεί στις κατάντη στάσεις.
Παρομοίως, προβλέψεις άφιξης και αναχώρησης σε όλες τις κατάντη στάσεις μπορούν
να υπολογιστούν, ενόσω το όχημα είναι ακόμα στη στάση i . Η διαδικασία αυτή ανανεώ-
νεται κάθε στιγμή, κατά την οποία ένα όχημα αφικνείται ή αναχωρεί από στάση γνωστού
χρονικού σημείου.
2Η. – Αλγόριθμος Πρόβλεψης φίλτρου Kalman
Ο αλγόριθμος φίλτρου Kalman λαμβάνει υπόψη τα ιστορικά δεδομένα χρόνων δια-
δρομής από τις 3 τελευταίες ή και περισσότερες μέρες, ίδιας κατηγορίας κίνησης, όπως
καθημερινή ή Σ/Κ. Τα δεδομένα αυτά αφορούν σε συγκεκριμένο τμήμα κίνησης κατά τη
χρονική στιγμή k+1 , συν την τελευταία τρέχουσα παρατήρηση της χρονικής στιγμής
k κατά τη μέρα που καταγράφεται αυτή η τιμή, ώστε να προβλεφθεί ο χρόνος κίνησης
k+1 στο τμήμα.
2Θ. – Λειτουργία Αλγόριθμου
Στην ουσία, το φίλτρο Kalman αποτελείται από μια σειρά μαθηματικών εξισώσεων, οι
οποίες υλοποιούν μορφή εκτιμήσεων ως πρόβλεψη-διόρθωση. Γίνεται χρήση των στατι-
στικών δεδομένων από 3 διαδρομές ίδιου δρομολογίου περασμένων ημερών και
από την ακριβώς προηγούμενη διαδρομή, την ίδια μέρα, μπορεί να μορφοποιηθεί
όπως αναλύεται παρακάτω.
)(][)(
][)()1(
kedataVARdataVAR
dataVARkekg
outin
out
���
�� (4)
a(k + 1) = 1 – g(k + 1) (5)
e(k +1) = VAR[datain]*g(k + 1) (6)
P(k + 1) = a(k + 1)*art(k) + g(k + 1)*art1(k + 1) (7)

10 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 11
όπου:
g η συνεισφορά από το φίλτρου
a η συνεισφορά από τον κύκλο δράσης
e το σφάλμα του φίλτρου
p η πρόβλεψη
art(k) ο πραγματικός χρόνος διαδρομής του προηγούμενου οχήματος, κατά τη
χρονική στιγμή k
art1(k+1) ο πραγματικός χρόνος διαδρομής της προηγούμενης μέρας κατά τη χρονική
στιγμή k+1
VAR[dataout] η διακύμανση της πρόβλεψης
VAR[data in] η διακύμανση των 3 τελευταίων ημερών:
art3(k+1), art2(k+1) and art1(k+1 ) ”
Η διακύμανση εισόδου VAR[datain] υπολογίζεται σε κάθε χρονική στιγμή k+1, χρησι-
μοποιώντας τους πραγματικούς χρόνου διαδρομής για τις τελευταίες 3 μέρες, art1(k +
1), art2(k + 1) & art3(k + 1):
VAR[datain] = VAR[art1(k + 1), art2(k + 1), art3(k + 1)] (8)
όπου:
art1(k+1) ο πραγματικός χρόνος κίνησης του οχήματος στη χρονική στιγμή k+1 κατά
την αμέσως προηγούμενη μέρα
art2(k+1) ο πραγματικός χρόνος κίνησης του οχήματος στη χρονική στιγμή k+1 , 2
μέρες πριν
art3(k+1) ο πραγματικός χρόνος κίνησης του οχήματος στη χρονική στιγμή k+1 , 3
μέρες πριν.
Ο γενικός ορισμός της διακύμανσης (ή διασποράς, ή μεταβλητότητας) VAR, μιας τυ-
χαίας μεταβλητής Χ είναι:
VAR[X] = E[(X – E[X])2] (9)
όπου Ε(Χ), η μαθηματική ελπίδα, ή αναμενόμενη τιμή ή μέση τιμή της τυχαίας
μεταβλητής Χ.
Στη συγκεκριμένη περίπτωση:

12 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 13
3
)1()1()()( 121 ������
kartartkartartAvgXE (10)
Τώρα, η διακύμανση Δ μπορεί να υπολογιστεί ως ακολούθως:
Δ1= [art1(k+1) – avg(art)]2 (11)
Δ2= [art2(k+1) – avg(art)]2 (12)
Δ3= [art3(k+1) – avg(art)]2 (13)
και
3][ 321 DDD
dataVAR in
��� (14)
Ο όρος VAR[dataout] βασίζεται στα αποτελέσματα εξόδου από το πρότυπο πρόβλε-
ψης και την αντίστοιχη μελλοντική παρατήρηση. Δεν είναι διαθέσιμα ταυτόχρονα και τα
2 αυτά δεδομένα, από τη στιγμή κατά την οποία η πρόβλεψη δεν έχει γίνει ακόμα, όπως
το ίδιο και η μελλοντική διαδρομή. Ιδανική περίπτωση θα είναι ο όρος VAR[datain] να
ισούται με VAR[dataout] για μεγαλύτερη απόδοση κατά την πρόβλεψη. Σε αυτή την
περίπτωση, εισάγεται ο όρος VAR[localdata], ο οποίος ισούται με τη διακύμανση των
δεδομένων εισόδου και εξόδου:
VAR[localdata] = VAR[datain] = VAR[dataout] (15)
και οι εξισώσεις (4) και (6) μετατρέπονται ως εξής:
][*2)(
][)()1(
data
data
localVARke
localVARkekg
��
�� (16)
e(k + 1) = VAR[localdata]*g(k + 1) (17)
Τώρα, καθίσταται εύκολη η υλοποίηση του φίλτρου Kalman για την πρόβλεψη των
χρόνων κίνησης, κατά μήκος της διαδρομής, από κάποιο σημείο ελέγχου στο επόμενο.
Η σειρά εφαρμογής των εξισώσεων, θα πρέπει να είναι (16), (5), (17), (7):
][*2)(
][)()1(
data
data
localVARke
localVARkekg
��
�� (16)
a(k + 1) = 1 – g(k + 1) (5)
e(k + 1) = VAR[localdata]*g(k + 1) (17)
P(k + 1) = a(k+1)*art(k) + g(k+1)*art1(k + 1) (7)

12 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 13
������������������������ ��������������,, �������� ««����������������������������»» -- �������������������� ���������� ,, ����.. ������..������..������..,, ��..��..��.. 12
������� ������: k -----�k+1
������� ���� ��������� ���� ��������
(«��������») («��������»)
][*2)(
][)()1(
data
data
localVARke
localVARkekg
��
��
)1(*].[)1( ��� kg�VARke ����������
)1(1)1( ���� kgke
1*)1(*)1()1( ������ kk tkgtkakP
������ ��������� ������ ������������ ��������’��
������ ��������� ��� ������������ ����� ��� �� ������������ ���������� k+1
Var[�����.������]=
average{ Var[��.�����.k+11���� ���� ], Var[��.�����.k+1
2����� ����],
Var[��.�����.k+13����� ����] }
Εικόνα 2.2. Υπολογιστικά βήματα απλοποιημένου κύκλου με φίλτρο Kalman για πρόβλεψη χρόνου διαδρομής, κατά τη χρονική στιγμή k+1.
2Ι. – Παράδειγμα Εφαρμογής Αλγόριθμου Πρόβλεψης με Χρήση Φίλτρου Kalman
Ας υποθέσουμε ότι παρακολουθείται γραμμή τρόλεϊ επί 3 μέρες μεταξύ σημείων ελέγ-
χου σε οδικό τμήμα (Πίνακας 2.1).
Πίνακας 2.1. Στοιχεία παραδείγματος για τον υπολογισμό παραμέτρων κατά την εφαρμογή αλγόριθμου πρόβλεψης χρόνου κίνησης, με χρήση φίλτρου Kalman. Πηγή: [2-3].

14 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 15
Ζητούμενο είναι η πρόβλεψη της επόμενης διαδρομής, κατά την επόμενη διαδρομή των
7.15:00. Η διαδρομή αυτή, έχει ονοματιστεί παραπάνω k+1. Από το σύστημα αυτόματου
εντοπισμού, π.χ. μέσω GPS, είναι απευθείας γνωστός ο προηγούμενος χρόνος διαδρομής,
κατά τη διαδρομή των 7.03:00, ο οποίος διαπιστώνεται 125sec. Είναι γνωστός, επίσης, ο
χρόνος κίνησης για κάθε μια από τις διαδρομές των 3 τελευταίων ημερών, ο οποίος είναι
art3=116sec για 3η μέρες πριν, art2=145sec για 2 μέρες πριν, art1=135sec για την 1η μέρα
πριν. Ο μέσος όρος αυτών των τιμών υπολογίζεται 132,0sec. Η διακύμανση για την κάθε
μέρα είναι αντίστοιχα 256(sec2), 169(sec2), 9(sec2). Ο μέσος όρος των διακυμάνσεων αυ-
τών προκύπτει 144,67(sec2). Το επόμενο βήμα για την τελική πρόβλεψη P(k+1) από την
εξίσωση (7), είναι να υπολογιστούν οι εξισώσεις (16), (5) και (17) του φίλτρου Kalman.
Για την εξίσωση (16) είναι γνωστή η τιμή του Μ.Ο των διακυμάνσεων (144,67) και το
σφάλμα φίλτρου e(k)= VAR[localdata]*g(k)=25,72 του προηγούμενου τρόλεϊ. Επίσης, μπο-
ρεί να υπολογιστεί το σφάλμα e(k+1), το οποίο θα χρησιμοποιηθεί για το επόμενο βήμα
k+2. Η τιμή της εξίσωσης 5, a(k+1)=1 – g(k+1), προκύπτει εύκολα. Η τιμή P(k+1),
κυρίως, βασίζεται στην τιμή το χρόνου κίνησης του προηγούμενου οχήματος των 7.03:00,
κατά την ίδια μέρα και την τιμή του χρόνου του οχήματος των 7.15:00 κατά την προηγού-
μενη ακριβώς μέρα [(art1(k+1)], κάθε μία πολλαπλασιαζόμενη, αντιστοίχως, με δυναμικά
«βάρη» g(k+1) και a(k+1), τα οποία ανανεώνονται σε κάθε νέο βήμα πρόβλεψης.
2ΙΑ. – Αποτίμηση Επίδοσης Προτύπου
Με σκοπό να εκτιμηθεί η ακρίβεια των προβλέψεων και κατά συνέπεια η επίδοση του
εκάστοτε πρότυπου, έχουν προταθεί τυποποιημένοι δείκτες. Χρησιμοποιώντας τέτοιους,
μπορεί να γίνει εύκολα, τόσο η αμερόληπτη σύγκριση με άλλα πρότυπα, όσο και η σύγκρι-
ση της απόδοσης του ίδιου του προτύπου από καιρό εις καιρόν. Συνήθεις δείκτες είναι:
RMSE: Root of Mean Squared Error (Τετραγωνική Ρίζα του Μέσου Τετραγωνικού
Σφάλματος). MRE: Mean Relative Error (Μέσο Σχετικό Σφάλμα) Καταδεικνύει το ανα-
μενόμενο σφάλμα ως κλάσμα της μέτρησης. SRE: Standard deviation of the Relative
Error (Τυπική Απόκλιση του Μέσου Σχετικού Σφάλματος).RSRE: Root Squared Relative
Error (Τετραγωνική Ρίζα του Τετραγωνικού Σχετικού Σφάλματος) το μέτρο αυτό δίνει μια

14 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 15
εικόνα των τυχόν μεγάλων σφαλμάτων πρόβλεψης. MRE: Maximum Relative Error
(Μέγιστο Σχετικό Σφάλμα), δίνει το μέγιστο απολύτως σφάλμα μιας σειράς προβλέψεων.
Ο όρος Τπρόβλεψης - Τπραγματική= ΔΤπρόβλεψης (Τ: χρονική στιγμή) αποτελεί το απόλυτο σφάλ-
μα σε μονάδες χρόνου της πρόβλεψης με την πραγματική τιμή, η οποία μετρήθηκε για
την αντίστοιχη γραμμή, διαδρομή και χρονική περίοδο.
Με τα παραπάνω μέτρα σύγκρισης και στην ίδια αυτή διαδρομή, συγκρίνονται τα
διάφορα πρότυπα πρόβλεψης. Τέτοια είναι το πρότυπο των μέσων προηγούμενων
διαδρομών, το πρότυπο γραμμικής παλινδρόμησης, και τεχνητό νευρωνικό δί-
κτυο ή όπως ονομάζεται επαναληπτικό δίκτυο χρονικής υστέρησης (Time Lag Recurrent
Network). Αυτό της παλινδρόμησης και της χρονικής υστέρησης προβλέπουν χρόνους
διαδρομής για μεμονωμένα οδικά τμήματα, όπως και τα περισσότερα πρότυπα τα οποία
βρίσκονται στη βιβλιογραφία.
2ΙΒ. – Αποτελέσματα
Στην Εικόνα 2.3 παρουσιάζονται τα αποτελέσματα προσομοίωσης για 3 ξεχωριστές
περιπτώσεις κυκλοφοριακών συνθηκών. Το πρότυπο με χρήση αλγόριθμου φίλτρου
Kalman αποδίδει ελάχιστες τιμές σφαλμάτων στα περισσότερα μέτρα.
Εικόνα 2.3. Ενδεικτικές τιμές αποτίμησης σφάλματος από πειραματικά δεδομένα. Εξετάζονται διάφοροι τύποι προσομοίωσης από 4 διαφορετικά προτύπων, υπό διαφορετικές κυκλοφοριακές συνθήκες (φυσιολο-γικές, έκτακτες, κλείσιμο λωρίδας). Πηγή: [2-3]. Στο πάνω δεξιά τεταρτημόριο παρατίθενται αποτελέσματα
από την εφαρμογή του Φίλτρου Kalman στις μετρήσεις σε διαδρομές τρόλεϊ ΗΛΠΑΠ (πρωινή περίο-δος), όπως αναπτύσσονται παρακάτω (βλ. Κεφάλαιο 4).

16 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 17
Τα αποτελέσματα των μετρήσεων από τη βιβλιογραφία [2-6] κατέδειξαν, επίσης, τον
τρόπο κατά τον οποίο το ενδεικνυόμενο πρότυπο μπορεί να συλλάβει δυναμικές
μεταβολές, εξ αιτίας διαφορετικών λειτουργικών χαρακτηριστικών, όπως και στρατηγι-
κών ελέγχου στη γραμμή.
2ΙΓ. – Συμπεράσματα
Από την παραπάνω ανάλυση, προκύπτει ότι, μέσω της ανάπτυξης ενός τέτοιου απλού
αλγόριθμου, μπορεί το επιβατικό κοινό να πληροφορηθεί, εγκαίρως και αξιόπιστα, την
έλευση του επερχόμενου οχήματος. Άρα, διάταξη ανάλογης λογικής θα μπορούσε να
αποτελέσει τον πυρήνα ενός ολοκληρωμένου συστήματος για πρόβλεψη και πληροφόρη-
ση, ως ένα «Ευφυές» και αποτελεσματικό Σύστημα για τις Μεταφορές (ITS).
Κεφάλαιο 3 – Σύστημα Τηλεματικής Η.Λ.Π.Α.Π.
Εικόνα 3.1. Ενημερωτική Πινακίδα εντός οχήματος τρόλεϊ των Η.Λ.Π.Α.Π. Πηγή: [3-1]
3Α. –Α.Σ.Ε.Ο. – Η.Λ.Π.Α.Π,
Αυτόματο Σύστημα Εποπτείας Οχημάτων – Ηλεκτροκίνητα Λεωφορεία Περιοχής Αθη-
νών Πειραιώς.
Στην Ελλάδα, εφαρμογή συστήματος διαχείρισης στόλου με χρήση ITS, υφίσταται στα

16 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 17
Ηλεκτροκίνητα Λεωφορεία Περιοχής Αθηνών-Πειραιώς. Το σύστημα τέθηκε σε πιλοτικά
σε λειτουργία το 1996 και σήμερα βρίσκεται σε σχεδόν πλήρη ανάπτυξη. Το Αυτόματο
Σύστημα Εποπτείας Οχημάτων Η.Λ.Π.Α.Π. (Α.Σ.Ε.Ο.) περιλαμβάνει το Κέντρο Δι-
αχείρισης Οχημάτων (ΚΔΟ), τους αναμεταδότες σε Πάρνηθα και Υμηττό και 190
οχήματα ενταγμένα σε 10 Γραμμές.
3Β. – Δυνατότητες Συστήματος
Το σύστημα για την εποπτεία οχημάτων διαθέτει δυνατότητες, ώστε: Να εντοπίζε-
ται ανά πάσα στιγμή της θέσης όλων των οχημάτων με ακρίβεια μεγαλύτερη από 10m.
Προσδιορίζονται τα χρονικά διαστήματα μεταξύ διαδοχικών στάσεων και μέσω του υπο-
λογιστή ο οποίος βρίσκεται στο όχημα. Αποστέλλονται οι παραπάνω πληροφορίες με
ασύρματη επικοινωνία, μέσω των αναμεταδοτών Υμηττού και Πάρνηθας, στο ΚΔΟ των
Η.Λ.Π.Α.Π., όπου ταξινομούνται και επεξεργάζονται, επιτρέποντας την παρέμβαση στη
διεξαγωγή των δρομολογίων, ανάλογα με τις ανάγκες του επιβατικού κοινού και τις συν-
θήκες κυκλοφορίας. Πληροφορούνται οι επιβάτες, από ειδικούς πίνακες εγκαταστεστη-
μένους εντός οχήματος, για τις στάσεις του οχήματος. Παρουσιάζονται όλα τα δεδομένα,
από το σύστημα διαχείρισης των τρόλεϊ στην οθόνη της κονσόλας χειρισμών, την οποία
έχει μπροστά του ο κάθε οδηγός τρόλεϊ.
3Γ. – Τμήματα Συστήματος & Λειτουργίες
Το όλο Σύστημα Εποπτείας Οχημάτων αποτελείται από 4 μέρη: Κεντρικός Υπολογι-
στής, Ραδιοδίκτυο, «Έξυπνο» όχημα και μελλοντικά, η «Έξυπνη Στάση».
3.1 Έξυπνο Όχημα
Στην Εικόνα 3.2 απεικονίζεται λεπτομέρεια από κάποιο εκ των 190 οχημάτων ΗΛΠΑΠ,
το οποίο διαθέτει συστήματα GPS και μετάδοσης πληροφοριών, το οποίο μπορεί να γίνει
αντιληπτό, παρατηρώντας τη μικρή κεραία στην οροφή του οχήματος, περίπου πάνω από
τη θέση του οδηγού.

18 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 19
�� ��� ������� ��������� �������� ����������� ��� 4 ����: ���������
�����������, �����������, «������» ����� ��� ����������, � «������ �����».
3.1 ������ �����
���� ������ 3.2 ������������� ����������� ��� ������ �� ��� 190 ��������
����� �� ����� �������� ��������� GPS ��� ��������� ����������� �� �����
������ �� ����� ��������� ������������ ��� ����� ������ ���� ����� ���
��������, ������� ���� ��� �� ���� ��� ������.
������ 3.2. ����������� ��� ��� ����� «�������» �������� ������ �����. �� �������� �����
������������ ��� ������ �����-������������, ��� �� ���� «�������» �� �����
������������ ������� GPS.
� ���������� ����� ��������
����� �.�.�.�.�. � ���������� ���� ���������������� �� ����� ��� ����������
����������� ���������� �� ������ �� ������ ��������� ��������� ��������������
��� ��������� L1 ��� GPS. � ���������� ���������� ��������� ���������
��������� �� ���� ��� ����������� GPS ��������� ���� ����� � ������ ��������� ��
������ ������� �������������, ���� ����� ��� ���. ���� � ������ �������� ���
GPS ����� ���� �������� ��� �� �������� �������� ���� ��� ������� ���������,
������ �� 10m. ������ �� ������ ���� �� GPS, ��� ��������� ������ ����
Εικόνα 3.2. Λεπτομέρεια από την οροφή «έξυπνου» οχήματος τρόλεϊ ΗΛΠΑΠ. Το αριστερό βέλος καταδεικνύει την κεραία ραδιο-επικοινωνιών,
ενώ το δεξί «ακουμπά» τη μόλις διακρινόμενη συσκευή GPS.
• Εντοπισμός Θέσης Οχημάτων
Στους Η.Λ.Π.Α.Π. η λειτουργία αυτή πραγματοποιείται με χρήση του συστήματος δο-
ρυφορικού εντοπισμού, με δέκτες, οι οποίοι λαμβάνουν μετρήσεις ψευδοαπόστασης στη
συχνότητα L1 του GPS. Η διαδικασία διορθώσεων προσφέρει διαφορικό εντοπισμό, με
βάση τις αντίστοιχες GPS μετρήσεις ενός δέκτη, ο οποίος βρίσκεται σε σημείο γνωστών
συντεταγμένων, στη στέγη του ΚΔΟ.
Έτσι, η τελική ακρίβεια του GPS είναι καλύτερη από το ελάχιστο αποδεκτό όριο
για τέτοιες εφαρμογές, δηλαδή τα 10m.
Ειδικά, σε σημεία όπου το GPS, δεν προσφέρει κάλυψη, λόγω υψηλών κτιρίων ή μη
κάλυψης, γενικότερα, σύστημα με οδόμετρο επίγειου εντοπισμού υποβοηθά τον εντοπι-
σμό σε ικανοποιητικότατο βαθμό.
Από το όχημα εκπέμπονται δεδομένα, τα οποία αφορούν στην ταυτότητά του, τον
οδηγό του, αριθμό διαδρομής, θέση οχήματος, πληροφορίες για την κατάσταση
του οχήματος, κλπ, στο ΚΔΟ. Η ανανέωση όλων των παραπάνω πληροφοριών γίνεται
ανά 20sec.

18 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 19
• Κέντρο Διαχείρισης Οχημάτων
Το ΚΔΟ (Εικόνα 3.3) απασχολείται, κυρίως, με τη διαχείριση των επικοινωνιών, τη
γραφική αναπαράσταση του δικτύου των γραμμών και τη διαχείριση των δρομολογίων
και της κατάστασης κίνησης.
Εικόνα 3.3. Απόψεις από το Κέντρο Διαχείρισης Οχημάτων του ΗΛΠΑΠ στο αμαξοστάσιο της περιοχής Κόκκινου Μύλου, Δ. Νέας Φιλαδέλφειας - Αττική. Διακρίνονται οι ρυθμιστές
βάρδιας μπροστά από τις οθόνες ελέγχου, καθώς και οι υπεύθυνοι χειριστές του συστήματος Τηλεματικής.
Η βάση δεδομένων είναι οργανωμένη με τέτοιο τρόπο, ώστε να υπάρχουν, από τη μία
οργανωμένα τα δεδομένα, τα οποία αφορούν τον προγραμματισμό των δρομολογίων και
από την άλλη, τα πραγματικά δεδομένα, για τη συγκριτική μελέτη και εξαγωγή συμπερα-
σμάτων και στατιστικών στοιχείων.
Το GIS περιέχει το ρυμοτομικό υπόβαθρο (τετράγωνα, οδούς, οδικούς άξονες) για
τις περιοχές, τις οποίες αφορούν στα δρομολόγια των ΗΛΠΑΠ, με ακρίβεια αυτή της
Γεωγραφικής Υπηρεσίας Στρατού (ΓΥΣ), σε κλίμακα 1:5000. Πάνω στο υπόβαθρο αυτό
παρουσιάζονται τα οχήματα, τα οποία, με τη μορφή συμβόλων, απεικονίζονται πάνω στο
χάρτη [Εικόνα. 3.4].

20 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 21
Εικόνα 3.4. Υπόβαθρό GIS με απεικόνιση διαδρομών, στάσεων και οχημάτων σε πραγματικό χρόνο όπως απεικονίζεται στους ελεγκτές του συστήματος
Τηλεματικής των Η.Λ.Π.Α.Π. Πηγή: [3-1].
Το πρόγραμμα είναι εφοδιασμένο με αλγόριθμους βέλτιστης διαδρομής, για την περί-
πτωση κατά την οποία τα οχήματα αναγκάζονται να κυκλοφορήσουν πέραν των καθορι-
σμένων δρομολογίων, για λόγους όπως ατυχήματα, συγκεντρώσεις, κλπ.
ΚΕΦΑΛΑΙΟ 4 – ΕΦΑΡΜΟΓΗ ΣΕ ΠΡΑΓΜΑΤΙΚΕΣ ΣΥΝΘΗΚΕΣ
4Α. – Σχεδιασμός Μετρήσεων
Με σκοπό να πραγματοποιηθούν πειραματικές μετρήσεις και να εξεταστεί το προταθέν
πρότυπο σε πραγματικές συνθήκες, επιλέχθηκε τμήμα από γραμμή τρόλεϊ, η οποία καλύπτε-
ται από GPS. Επιλέχθηκε εκείνη, η οποία πληρούσε τα εξής κριτήρια: - Ικανοποιητική συ-
χνότητα δρομολογημένων οχημάτων - Κυκλοφοριακές συνθήκες κατά μήκος της διαδρο-
μής, οι οποίες διατηρούνται σχετικά σταθερές σε όχι μικρά χρονικά διαστήματα - Διέλευση
από ευρείς οδικούς άξονες, οι οποίοι δεν είναι κορεσμένοι σε μεγάλη διάρκεια της μέρας
και ειδικά κατά την περίοδο συλλογής δεδομένων - Ευρύτητα ορίζοντα σε κάθε σημείο της
διαδρομής, ώστε να διατηρείται απρόσκοπτα η ορατότητα προς 4 τουλάχιστον δορυφόρους,
ώστε τα διαθέσιμα δεδομένα να είναι συνεχή και αξιόπιστα - Πρακτική η συλλογή στοιχεί-
ων σε συγκεκριμένο τμήμα διαδρομής. Το αυτόματο σύστημα στατιστικών δεδομένων κατα-
γράφει ακριβείς διελεύσεις από 2-3 ρυθμιστικά σημεία (check points) ανά κατεύθυνση.

20 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 21
Κατόπιν διερεύνησης των παραπάνω, από κοινού με τους υπεύθυνους των ΗΛΠΑΠ,
κρίθηκε ως βέλτιστη η επιλογή της γραμμής «12 - Ζάππειο – Περιστέρι». [Εικ. 4.1].
Εικόνα 4.1. Διαδρομή μελέτης για τη γραμμή τρόλεϊ 12 (Αγ. Ιερόθεος-Παναγίτσα-Ομόνοια) στους Δήμους Περιστερίου (αριστερά) και Αθηναίων (δεξιά) με ονόματα κυριοτέρων γύρω οδών. Η διαδρομή μετά τη στάση Ομόνοια («Σίγγερ»), μέσω της οδού Σταδίου, συνεχίζει ως το Ζάππειο.
Άποψη από ύψος 13.000ft –Πηγή: [4-1].
Για τις μετρήσεις επιλέχθηκε η κατεύθυνση προς κέντρο. Τα ρυθμιστικά σημεία εν-
διαμέσως της διαδρομής είναι 2: η στάση Παναγίτσα (Ν. Κοίμησης Θεοτόκου) αμέσως
μετά τον Κηφισό, προς Αθήνα και Ομόνοια (ή αλλιώς Σίνγκερ) επί της οδού Σταδίου,
μεταξύ πλατείας Ομόνοιας & οδού Αιόλου.
4Β. – Μετρήσεις
4Β.1 – Εκτιμήσεις Εφαρμογής Προτύπου με φίλτρο Kalman
Οι μέρες, κατά τις οποίες πραγματοποιήθηκαν μετρήσεις ήσαν καθημερινές Σεπτεμβρί-
ου, μετά την εφαρμογή του χειμερινού προγράμματος δρομολογίων (7/9). Ως περίοδο
μέτρησης, για κάθε μέρα, επιλέχθηκαν οι πρωινές ώρες, τόσο υπό φυσιολογικές,
όσο και ιδιαίτερες συνθήκες πρωινής αιχμής.
Οι χρόνοι διαδρομής της περιόδου των πρωινών φυσιολογικών συνθηκών 9.30 –
10.30 είναι αντιπροσωπευτικοί των χρόνων διαδρομής ολόκληρης της μέρας. Οι χρόνοι
διαδρομής της πρωινής αιχμής 7.00-9.00 επιλέχθηκαν, ώστε να ελεγχθεί η αξιοπιστία
και να αποτιμηθούν οι επιδόσεις του προτύπου στις ιδιαίτερα απαιτητικές αυτές συνθή-

22 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 23
κες. Κατά την εβδομάδα μετρήσεων δεν υπήρξαν συνθήκες εξαιρετικά ασυνήθιστες,
όπως άσχημος καιρός ή καταλήψεις οδών. Από τις μετρήσεις αυτές προέκυψαν δεδομένα
διαδρομών, τα οποία κατόπιν εισήχθησαν στο πρότυπο φίλτρου Kalman, το οποίο είχε
αναπτυχθεί, μέσω του προγράμματος MsExcel, στα Κεφάλαια 10 και 11.
4Β.2 – Εκτιμήσεις Εφαρμογής Paragon
Για τις παραπάνω ώρες, έγινε σύγκριση των αποτελεσμάτων από το πρότυπο με φίλ-
τρο Kalman, με αποτελέσματα τα οποία παρήχθησαν από την εμπορική εφαρμογή πρό-
βλεψης χρόνων διαδρομής Paragon.
Η εφαρμογή Paragon® αποτελεί υποσύστημα των ολοκληρωμένων λύσεων δρομο-
λόγησης και εποπτείας στόλου βάσει GIS, τις οποίες εφαρμόζει η εταιρία Wackenhut
ΤelematiX [4-2]. Για την περίπτωση των τρόλεϊ, ο εταιρικός στόλος αποτελείτο από τα
οχήματα, ως σημείο εκκίνησης (αποθήκη) επιλέχθηκε η Αφετηρία και ως σημεία παράδο-
σης ορίστηκαν οι στάσεις. Αυτές τοποθετήθηκαν πάνω σε υπόβαθρο GIS, βάσει συντε-
ταγμένων από GPS [Εικ. 4.2].
Εικόνα 4.2. Απεικόνιση σε GIS στάσεων Γραμμής 12 (Πλ. Αγ Γεωργίου-Σίγγερ) και σειρά δρομολόγησης για την εφαρμογή Paragon.

22 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 23
Η λογική της παραπάνω εφαρμογής για την πρόβλεψη χρόνων διαδρομής βασίζεται
στον υπολογισμό των χρόνων διέλευσης από οδικά τμήματα, βάσει της ταχύτητας, η οποία
ορίζεται για κάθε τμήμα. Αφού οριστούν τα σημεία στάσεων, το πρόγραμμα προσδιορίζει
τα διανύσματα από στάση-σε-στάση, τις οδούς διέλευσης και κατόπιν τον χρόνο για τη
διέλευση κάθε στάσης. Αθροίζοντας αυτούς τους χρόνους, προκύπτει ο ολικός χρόνος
διαδρομής. Παρατηρείται ότι κατά την προσομοίωση της εφαρμογής, ο προβλεπόμενος
χρόνος για καθένα τμήμα, αλλά τη συνολική διαδρομή προκύπτει: ΑΓ.ΙΕΡΟΘΕΟΣ–ΠΑΝΑ-
ΓΙΤΣΑ: 17min, ΠΑΝΑΓΙΤΣΑ–ΣΙΓΓΕΡ: 12 min, συνολικά, ΑΓ.ΙΕΡΟΘΕΟΣ– ΣΙΓΓΕΡ: 29min.
Το Paragon είναι ένα στατικό πρότυπο και δεν επηρεάζεται από τις καθημερινές συν-
θήκες, αν ο χρήστης δεν επέμβει χειροκίνητα να μεταβάλλει τις κυκλοφοριακές ή οδικές
συνθήκες, οι οποίες ,προς το παρόν, συλλέγονται από οχήματα της υπεύθυνης εταιρίας
για τη διανομή της εφαρμογής.
4Β.3 – Σύγκριση Εφαρμογών
Πίνακας 4.1. Σύγκριση μεταξύ των δεικτών σφαλμάτων για τα πρότυπα Kalman και Paragon για προσο-μοίωση 42 διαδρομών σε 2 μέρες πρωινών μετρήσεων μεταξύ των σημείων αφετηρίας Αγ. Ιερόθεου (Α),
Παναγίτσα (Β) και Σίγγερ (Γ), της γραμμής 12.

24 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 25
Το πρότυπο φίλτρου Kalman επελέγη για περαιτέρω εξέταση και στις περισσότερο
απαιτητικές μετρήσεις πρωινής αιχμής.
4Β.4 –Συνθήκες Πρωινής Αιχμής
Με σκοπό να διερευνηθεί η προσαρμοστικότητα του προτύπου με φίλτρο Kalman υπό
συνθήκες έντονης κυκλοφοριακής μεταβλητότητας, ιδιαίτερα στο κέντρο της πόλης
(στάσεις Μεταξουργείο – Σίγγερ), έγινε εφαρμογή του και σε δρομολόγια περιόδου
πρωινής αιχμής 7.00-9.00.
Όπως φαίνεται στον παρακάτω Πίνακα 4.2, το δρομολόγιο, το οποίο αναχώρησε στις
8:31, αφίχθη στη στάση Σίγγερ στις 9:04 και έκτοτε η κυκλοφοριακή κατάσταση περι-
γράφεται από τις μετρήσεις «φυσιολογικών συνθηκών».
Πίνακας 4.2. Ενδεικτικός Πίνακας Αποτελεσμάτων από προηγούμενες μετρήσεις, εκτιμήσεις φίλτρου Kalman, a posteriori μετρήσεις και κατόπιν υπολογισμός
των δεικτών σφαλμάτων για την Παρασκευή 23/09 σε συνθήκες πρωινής αιχμής.
Σημείωση:
Όλοι οι Πίνακες αποτελεσμάτων βρίσκονται στο Παράρτημα της πλήρους εργασίας σε
μεγαλύτερο μέγεθος.
4Γ. – Αποτελέσματα
Η σύγκριση των πραγματικών με τους προβλεπόμενους χρόνους διαδρομής, τόσο από
το πρότυπο φίλτρου Kalman, όσο και από την εφαρμογή Paragon, παρουσιάζεται στο
παρακάτω διάγραμμα [Εικ. 4.3].

24 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 25
Εικόνα 4.3. Ενδεικτική απεικόνιση σε διάγραμμα των πραγματικών και των προβλεπόμενων χρόνων διαδρομής για τη Γραμμή 12 κατά τις πρωινές μετρήσεις έμπτης και Παρασκευής 22,23/09/05, μεταξύ των ρυθμιστικών σημείων Αφετηρίας
(Αγ.Ιερόθεος), Κηφισού (Παναγίτσα) και Ομόνοιας (Σίγγερ), Οι προβλέψεις βασίζονται στο πρότυπο με φίλτρο Kalman και στην εφαρμογή Paragon.
Εικόνα 4.4. Τιμές αποτίμησης σφάλματος από πειραματικά δεδομένα εφαρμογής προτύπου φίλτρου Kalman στις μετρήσεις διαδρομών τρόλεϊ ΗΛΠΑΠ,
υπό φυσιολογικές συνθήκες.
4Γ.1 – Ώρες Αιχμής
Τα αντίστοιχα αποτελέσματα από τις μετρήσεις στις ώρες αιχμής παρουσιάζονται στην
ακόλουθη Εικόνα 4.5.

26 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 27
Εικόνα 4.5. Ενδεικτική απεικόνιση σε διάγραμμα των πραγματικών και των προβλεπόμενων χρόνων δια-δρομής για τη Γραμμή 12 κατά τις πρωινές μετρήσεις Πέμπτης και Παρασκευής 22,23/09/05, μεταξύ των
ρυθμιστικών σημείων Αφετηρίας (Αγ.Ιερόθεος) - Κηφισού (Παναγίτσα) και Ομόνοιας (Σίγγερ).
4Δ. – Αποτίμηση
Το φίλτρο απέδωσε πάρα πολύ ικανοποιητικά αποτελέσματα πρόβλεψης, τόσο υπό
«φυσιολογικές» συνθήκες, όσο και κατά τις πρωινές ώρες αιχμής. Η σύγκριση με συγκε-
κριμένους δείκτες σφαλμάτων δείχνει πως στην παρούσα περίπτωση επετεύχθησαν
επιδόσεις ελαφρώς καλύτερες από καθιερωμένα βιβλιογραφικά πρότυπα, όπως
φαίνεται και στην Εικόνα 2.3 του Κεφαλαίου 2. Τα δεδομένα της συγκεκριμένης εικό-
νας παρουσιάζουν την κατάσταση από τους Μέσους Όρους (εκτός από το MaxRE, όπου
αναφέρεται στο Maximum των 42 προσομοιώσεων) των σφαλμάτων.
Από τα διαγράμματα Χρόνων Διαδρομής παρατηρείται η προσαρμοστικότητα του
προτύπου με φίλτρο Kalman στις συνθήκες του κάθε δρομολογίου. Το πρότυπο του
Paragon είναι στατικό, ως εκ τούτου αδυνατεί να συλλάβει τις ιδιαίτερες συνθήκες
του κέντρου της πόλης. Θα μπορούσε όμως να αποδώσει καλύτερα, αν ρυθμιζόταν
σε κατάλληλότερες τιμές οι παράμετροι του, οι οποίες αφορούν μέσες ταχύτητες στα
οδικά τμήματα, ιδιαιτέρως εκείνα του κέντρου της πόλης.
Συνολικά για κάθε μια από το σύνολο των 81 προσομοιώσεων εκτιμήθηκε το Σχετικό
Σφάλμα (Relative Error) και αυτό παρουσιάζεται με μορφή κατανομής συχνοτήτων και
αθροιστικής κατανομής, στις Εικόνες 4.6 και 4.7.

26 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 27
Εικόνα 4.6. Σχετική κατανομή συχνοτήτων για το σχ. σφάλμα μεταξύ πρόβλεψης και πραγματικής τιμής. Έχουν περιληφθεί 81 προσομοιώσεις από πρωινές μετρήσεις περιόδου
εντός και εκτός αιχμής - Σεπτέμβριος 2005. Σε αυτές τις μετρήσεις έγινε προσαρμογή διαφόρων κατανομών (μέσω λογισμικού BestFit®) και ως βέλτιστη προσαρμογή
για επίπεδο σημαντικότητας α=0,10 («πολύ σημαντικό») αποδείχθηκε η Βήτα Γενικευμένη με παραμέτρους (α1,α2,min,max) και παρατηρούμενο επίπεδο προσαρμογής P-value=0,1159.
Ο έλεγχος χ2 έδωσε: χ20,9=14,6837 με χ2
προσαρμογής=14,1852. Οι τιμές της παραπάνω προσαρμογής για τον έλεγχο Anderson-Darling: 0,5150 και Kolmogorov-Smirnov: 0,0922.
Εικόνα 4.7. Αθροιστική κατανομή πιθανότητας σχετικού σφάλματος μεταξύ πρόβλεψης και πραγματικής τιμής. Έχουν περιληφθεί 81 προσομοιώσεις από
πρωινές μετρήσεις περιόδου εντός και εκτός αιχμής - Σεπτέμβριος 2005.
Παρατηρείται ότι η πιθανότητα επίτευξης απόλυτου σφάλματος ±15% μεταξύ πρόβλε-
ψης–πραγματικής τιμής, είναι 90%.
Σε απόλυτα μεγέθη, υπό κανονικές συνθήκες 6 από τις 42 προβλέψεις είχαν απόλυτο
σφάλμα πάνω από 2min, δηλαδή, ποσοστό επίτευξης απόλυτου σφάλματος <2min:
86%. Αντίστοιχα, στις συνθήκες αιχμής, 6 από τις 39 εκτιμήσεις υπερβαίνουν σε απόλυτο
σφάλμα τα 3min, δηλαδή, ποσοστό επίτευξης απόλυτου σφάλματος <3min: 85%.

28 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 29
ΚΕΦΑΛΑΙΟ 5 – ΣΥΜΠΕΡΑΣΜΑΤΑ & ΠΡΟΤΑΣΕΙΣ ΓΙΑ ΠΕΡΑΙΤΕΡΩ ΈΡΕΥΝΑ
5Α.– Συμπεράσματα
Κωδικοποιημένα και εν συντομία, ως συμπεράσματα από την παρούσα εργασία μπο-
ρούν να εξαχθούν:
• Η ανθρώπινη κινητικότητα αποτελούσε και θα συνεχίσει να αποτελεί τμήμα της
καθημερινότητάς και της ζωής πλήθους πολιτών. Στα σημερινά διογκούμενα αστικά
κέντρα οι μετακινήσεις είναι ιδιαιτέρως κρίσιμες, φέρνοντας σε αλληλεξάρτηση πολ-
λές παραμέτρους της κοινωνίας, περιβάλλοντος, ασφάλειας, οικονομίας, υποδομών,
αισθητικής.
• Η ολοκληρωμένη Δημόσια Αστική Συγκοινωνία είναι σε θέση να προσφέρει βιώσι-
μή κυκλοφοριακή ανάπτυξη, για την κάλυψη των διαρκώς αυξανόμενων μεταφο-
ρικών αναγκών.
• Εφαρμόζοντας στις μεταφορές τεχνολογίες ευφυών συστημάτων (ITS), όπως το GPS
συνδεδεμένο με υπολογιστικές μονάδες, τα οχήματα καθίστανται ικανά να αναγνω-
ρίζουν τη θέση του στο δίκτυο (AVLS) και να τη μεταδίδουν μαζί με άλλες χρή-
σιμες πληροφορίες.
• Για την υλοποίηση ενός προτύπου πρόβλεψης του χρόνου διαδρομής, άρα και της
χρονική στιγμής άφιξης, έχουν προταθεί αρκετές μέθοδοι, από τις οποίες ξεχωρίζουν
τα Νευρωνικά Δίκτυα και το Πρότυπο με Φίλτρο Kalman.
• Χρησιμοποιώντας τον αλγόριθμο με απλό φίλτρο Kalman σε πραγματικά δεδομένα, από
πειράματα στον αθηναϊκό χώρο και συγκεκριμένα σε ακτινικό δρομολόγιο των ΗΛΠΑΠ,
αυτό απέδωσε πολύ ικανοποιητικά. Η ανάλυση μετρήσεων για πρόβλεψη υπό πρωινές
φυσιολογικές συνθήκες, κατέδειξε απόλυτο σφάλμα μικρότερο από 2min για Χρό-
νους Διαδρομής της τάξης των 35min σε ποσοστό μεγαλύτερο του 85% με μέγιστη
τιμή Σχετικού Σφάλματος (maxRelative Error) 0,264 (26%), όταν συνηθισμένές τι-
μές από τη βιβλιογραφία δίδονται για το συγκεκριμένο παράδειγμα του Κεφαλαίου 10,
maxRE: 0,077 ως 0,232 για το φίλτρο Kalman (για τις άλλες μεθόδους maxRE: 0,131
ως 3,172). Το παραπάνω σημαίνει ότι υπάρχουν ακόμη αρκετά περιθώρια βελτίωσης,
αν εκτελεστούν περισσότερα δρομολόγια και το σύστημα ισορροπήσει.

28 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 29
• Η αντίστοιχη ανάλυση των προβλέψεων, από το στατικό πρότυπο της εφαρμογής Paragon,
έδωσε ικανοποιητικά αποτελέσματα, όσον αφορά το κομμάτι διαδρομής εκτός κέντρου
και υπό φυσιολογικές συνθήκες (maxRE = 0,214), αλλά απέτυχε στην πρόβλεψη χρόνου
διαδρομής τόσο στην περιοχή του κέντρου, όσο και στις συνθήκες πρωινής αιχμής.
• Η κατανομή Βήτα γενικευμένη προσαρμόζεται (σε επίπεδο σημαντικότητας α=0,1) στο
ποσοστιαίο σχετικό σφάλμα, μεταξύ της πρόβλεψης και της πραγματικής τιμής των
μετρήσεων.
• Πιθανότητα επίτευξης απόλυτου σφάλματος ±15% μεταξύ πρόβλεψης–πραγματικής
τιμής, είναι 90%.
• Στις συνθήκες πρωινής αιχμής, απόλυτο σφάλμα <3min επιτυγχάνεται στο
85% των περιπτώσεων. Το maxMRE αποτιμήθηκε 0,173 (17%).
• Επομένως, ένας τέτοιος αλγόριθμός θα μπορούσε να χρησιμοποιηθεί ως βάση για την
υλοποίηση εφαρμογής πρόβλεψης χρόνου άφιξης σε στάση ΜΜΜ.
5Β.– Προτάσεις για Περαιτέρω Έρευνα
Από την ανάπτυξη των ανωτέρω Κεφαλαίων, προκύπτουν ορισμένα ζητήματα, τα
οποία θα μπορούσαν να αποτελέσουν αντικείμενο περαιτέρω έρευνας, πάνω στο συ-
γκεκριμένο αντικείμενο, η οποία δεν μπορεί να καλυφθεί από τα όρια έκτασης και
χρόνου της παρούσης μεταπτυχιακής εργασίας. Χαρακτηριστικά αναφέρονται:
⇒ Η υπαγωγή των αρμόδιων για τα συγκοινωνιακά-πολεοδομικά ζητήματα σε φορέα για
τη συλλογική μελέτη, διαχείριση και χάραξη μακροπρόθεσμης πολιτικής.
⇒ Η χρήση GIS με τις αντίστοιχες Βάσεις Δεδομένων για κατάστρωση και εποπτεία συνε-
χώς επίκαιρων Ενιαίων Πολεοδομικών & Κυκλοφοριακών Μελετών.
⇒ Τηλεματική και Διαχείριση Κυκλοφορίας: χρήση των ίδιων των «έξυπνων» ΜΜΜ
για την εκτίμηση της κυκλοφοριακής κατάστασης και παροχή πληροφοριών στο Κέ-
ντρο Ελέγχου Κυκλοφορίας και στους υπόλοιπους χρήστες του δικτύου.
⇒ Τηλεματική και Σηματοδότηση: χρήση δυνατοτήτων εντοπισμού ακριβείας για την
υπό προϋποθέσεις (πληρότητας, καθυστέρησης, υπόλοιπης ζήτησης) παροχή προτε-
ραιότητας κατά την προσέγγιση ΜΜΜ σε σηματοδοτούμενους κόμβους.

30 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 31
⇒ Υπό την προϋπόθεση της ενδελεχούς προσαρμογής του στις εκάστοτε κυκλοφοριακές
συνθήκες, ένα στατικό πρότυπο, όπως αυτό της εφαρμογής Paragon, θα μπορούσε να
χρησιμοποιηθεί ως βάση πρώτης εκτίμησης Χρόνων Διαδρομής, για συγκεκριμένο
τμήμα και χρονική περίοδο, δίνοντας μια περισσότερο μακροσκοπική εικόνα και σε
βάθος χρόνου σε σχέση με το πλήρως δυναμικό πρότυπο με φίλτρο Kalman.
⇒ Η πρόβλεψη, με ταυτόχρονη χρήση δεδομένων από φορατές, για την εκτίμηση της
ιστορικής, τρέχουσας, ή κατάντη κυκλοφοριακής κατάστασης.
⇒ Η ολοκλήρωση συνδυασμού των εξόδων του φίλτρου Kalman, ως είσοδο σε Νευ-
ρωνικό Δίκτυο, το οποίο θα λαμβάνει υπόψη του και άλλους παράγοντες, όπως
καιρικές συνθήκες, μέρα της εβδομάδος, περίοδος της μέρας, έκτακτα γεγονότα,
επιβατική κίνηση, κλπ.
⇒ Η οικονομική διάσταση των παραπάνω υλοποιήσεων σε σχέση με τα οφέλη.
Αναφορές 1ου Κεφαλαίου
[1-1]. Metz, D. Human mobility and transport policy. Centre for Aging & Public Health,
London School of Hygiene & Tropical Medicine Ingenia, London, 2004.
[1-2]. Αραβαντινός, Αθ. Πολεοδομικός Σχεδιασμός – Κυκλοφοριακός Σχεδιασμός για μια
Βιώσιμη Πόλη (επιμέλεια Βλαστός, Θ.). Εκδόσεις Συμμετρία, Αθήνα, 1997.
[1-3]. Βλαστός, Θ. Μια Διαφορετική Δημόσια Συγκοινωνία σε μια Διαφορετική Πόλη.
SYSTEMA Μελετητική – Αναπτυξιακή Εταιρία Δήμου Αθηναίων. Αθήνα, 2003.
Αναφορές 2ου Κεφαλαίου
[2-1]. Welding, P.I. The Instability Close Interval Service. Operational Research
Quarterly Vol. 8 133-148. 1957
[2-2]. Lin, W-H., Bertini, R.L. Modelling Schedule Recovery Processes in Transit Opera-
tions for Bus Arrival Time Prediction. 2003.
[2-3]. Shalaby, A., and A. Farhan. Bus Travel Time Prediction for Dynamic Operations
Control and Passenger Information Systems. Transportation Research Board, the
82nd Annual Meeting (CD-ROM), Washington DC, January 2003.
[2-4]. Wall, Z. D., Dailey, J. An Algorithm for Predicting the Arrival Time of Mass Transit

30 ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΤΕΧΝΙΚΑ ΧΡΟΝΙΚΑ ΝΟΕΜΒΡΙΟΣ-ΔΕΚΕΜΒΡΙΟΣ 2008 31
Vehicles Using Automatic Vehicle Location Data. Transportation Research Board
78th Annual Meeting Washington, D.C., 1999.
[2-5]. Welch, G., Bishop, G., An Introduction to the Kalman Filter, UNC-Chapel Hill, TR
95-041, 2004.
[2-6]. Chien, S. I., Ding, Υ., S.I., Chienhung, W. Dynamic Bus Arrival Time Predic-
tion with Artificial Neural Networks. Journal of Transportation Engineering,
September/October 2002, p.p.429-438, 2002.
[2-7]. Shalaby, A., Hemily, B. A Thematic Long-term Approach to Networking for the
Telematics and ITS Community. ATLANTIC Partnership of ITS Communities in
Europe and North America, Work Group 1.3, March 2004.
Αναφορές 3ου Κεφαλαίου
[3-1] .http://www.n-topos.gr/ (επίσκεψη 04/2005)- topos communications, 2001-2002.
- Τσαλκιτζίδης, Ε., (2002), Διπλωματική Εργασία «Πλοήγηση Οχημάτων σε Αστικό
Χώρο με Δορυφορικά Συστήματα Εντοπισμού – Εφαρμογή στον ΗΛΠΑΠ». Επιβλέπου-
σα Καθηγήτρια Τσακίρη Μαρία, Σχολή Αγρονόμων Τοπογράφων Μηχανικών, Ε.Μ.Π.
- Συγγρός, Α., (2001), Διπλωματική Εργασία «Δορυφορικός Εντοπισμός και Ανάπτυξη
Μεθόδου ‘Map Matching’ για την Πλοήγηση Οχημάτων σε Αστικό Περιβάλλον». Επιβλέ-
πων Καθηγητής Νάκος Βύρων, Σχολή Αγρονόμων Τοπογράφων Μηχανικών, Ε.Μ.Π.
Ενημερωτικό Φυλλάδιο «ΑΣΕΟ ΗΛΠΑΠ – Αυτόματο Σύστημα Εποπτείας Οχημάτων
ΗΛΠΑΠ»
Αναφορές 4ου Κεφαλαίου
[4-1]. http://earth.google.com/
[4-2] http://www.telematix.gr/site/index_gr.asp
Αφιερώνεται στους εργαζόμενους στα Μέσα Μαζικής Μεταφοράς
και στο δίκτυο Ε.Π.Ι.Β.Α.ΤΗ.Σ www.epivatis.gr