Nonlinear Differential Equations - Old Dominion -...
7
1 1 Nonlinear Differential Equations Nonlinear Differential Equations and The Beauty of Chaos 2 Examples of nonlinear equations ) ( ) ( 2 t kx dt t x d m − = Simple harmonic oscillator (linear ODE) More complicated motion (nonlinear ODE) )) ( 1 )( ( ) ( 2 t x t kx dt t x d m α − − = Other examples: weather patters, the turbulent motion of fluids Most natural phenomena are essentially nonlinear. 3 What is special about nonlinear ODE? For solving nonlinear ODE we can use the same methods we use for solving linear differential equations What is the difference? Solutions of nonlinear ODE may be simple, complicated, or chaotic Nonlinear ODE is a tool to study nonlinear dynamic: chaos, fractals, solitons, attractors A simple pendulum Model: 3 forces • gravitational force • frictional force is proportional to velocity • periodic external force ) cos( ,. ), sin( 2 2 t F dt d mgL dt d I ext f g ext f g ω τ θ β τ θ τ τ τ τ θ = − = − = + + = 5 Equations 2 2 2 0 2 0 2 2 , , ) cos( ) sin( mL F f mL L g I mgL t f dt d dt d = = = = + − − = β α ω ω θ α θ ω θ Computer simulation: there are very many web sites there are very many web sites with Java animation for the with Java animation for the simple pendulum simple pendulum 6 Case 1: A very simple pendulum ) sin( 2 0 2 2 θ ω θ − = dt d code
Transcript of Nonlinear Differential Equations - Old Dominion -...

1
1
Nonlinear Differential EquationsNonlinear Differential Equations
and The Beauty of Chaos
2
Examples of nonlinear equations
)()(2
tkxdt
txdm −=
Simple harmonic oscillator (linear ODE)
More complicated motion (nonlinear ODE)
))(1)(()(2
txtkxdt
txdm α−−=
Other examples: weather patters, the turbulent motion of fluidsMost natural phenomena are essentially nonlinear.
3
What is special about nonlinear ODE?
For solving nonlinear ODE we can use the same methods we use for solving linear differential equations
What is the difference?
Solutions of nonlinear ODE may be simple, complicated, or chaotic
Nonlinear ODE is a tool to study nonlinear dynamic: chaos, fractals, solitons, attractors
4
A simple pendulum
Model: 3 forces
• gravitational force
• frictional force is proportional to velocity
• periodic external force
)cos(,.),sin(
2
2
tFdtdmgL
dtdI
extfg
extfg
ωτθβτθτ
τττθ
=−=−=
++=
5
Equations
2220
202
2
,,
)cos()sin(
mLFf
mLLg
ImgL
tfdtd
dtd
====
+−−=
βαω
ωθαθωθ
Computer simulation: there are very many web sites there are very many web sites with Java animation for the with Java animation for the simple pendulumsimple pendulum
6
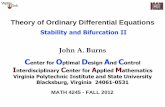
Case 1: A very simple pendulum
)sin(202
2
θωθ −=dtd
code

2
7
0 10 20 30 40 50 60-1.2
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2 θ(0)=1.0
θ(
t)
time
0.8
8
)sin(202
2
θωθ −=dtd
θωθ 202
2
−=dtd
Is there any difference between the nonlinear pendulum
and the linear pendulum?
9
0 10 20 30 40 50 60-1.2
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2 θ(0)=1.0 θ(0)=0.2
θ(t)
time
0.8
10
Amplitude dependence of frequency
For small oscillations the solution for the nonlinear pendulum is periodic with
For large oscillations the solution is still periodic but with frequency
explanation:
Lg== 0ωω
θϑ
θθθ
<
+−≈
)sin(21)sin( 2 K
Lg=< 0ωω
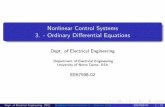
11
Phase-Space Plotvelocity versus position
-1.0 -0.5 0.0 0.5 1.0-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0 θ(0)=1.0 θ(0)=0.2
dθ/d
t
θ
E1
E2
phase-space plot is a very good way to explore the dynamic of oscillations
0.8
12
Case 2: The pendulum with dissipation
dtd
dtd θαθωθ −−= )sin(2
02
2
code
0 10 20 30 40 50-1.2
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
θ(0)=1.0, α=0.1
θ(t)
time
How about frequency in this case?

3
13
Phase-space plot for the pendulum with dissipation
0 10 20 30 40 50-1.2
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
θ(0)=1.0, α=0.1
θ(t)
time
-0.5 0.0 0.5-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
dθ/d
t
θ
14
Case 3: Resonance and beats
)cos()sin(202
2
tfdtd ωθωθ +−=
code
When the magnitude of the force is very large – the system is overwhelmed by the driven force (mode locking) and the are no beats
When the magnitude of the force is comparable with the magnitude of the natural restoring force the beats may occur
15
Beats
⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ −=+≈ tttt
2sin
2cos2)sin()sin( 00
0000ωωωωθωθωθθ
code
In beating, the natural response and the driven response add:
mass is oscillating at the average frequency and an amplitude is varying at the slow
frequency 2)( 0ωω −2)( 0ωω +
16
Example: beats
0 20 40 60 80 100 120-2.5
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
θ(0)=0.2, α=0.0, f=0.2, ω=1.1
θ(t)
time
-2.0 -1.5 -1.0 -0.5 0.0 0.5 1.0 1.5 2.0-2.0-1.8-1.6-1.4-1.2-1.0-0.8-0.6-0.4-0.20.00.20.40.60.81.01.21.41.61.82.0
dθ/d
t
θ
17
Resonance
0 20 40 60 80 100 120-2.5
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
θ(0)=0.2, α=0.0, f=0.1, ω=1.0
θ(t)
time
-2.0 -1.5 -1.0 -0.5 0.0 0.5 1.0 1.5 2.0-2.0-1.8-1.6-1.4-1.2-1.0-0.8-0.6-0.4-0.20.00.20.40.60.81.01.21.41.61.82.0
dθ/d
t
θ
That is not true for the nonlinear oscillator
For a simple harmonic oscillator the amplitude of oscillations increases without bound
code
18
Case 4: Complex Motion
)cos()sin(202
2
tfdtd
dtd ωθαθωθ +−−=
code
We have to compare the relative magnitude of the natural restoring force, the driven force and the frictional force
The most complex motion one would expect when the three forces are comparable

4
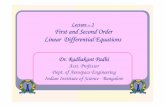
19
Case 4: Chaotic Motion
0 20 40 60 80 100120140160180200220240-25
-20
-15
-10
-5
0
5
10
15
θ(0)=1.0, α=0.2, f=0.7, ω=0.66
θ(t)
time
-24-22-20-18-16-14-12-10-8 -6 -4 -2 0 2 4 6 8 10-3
-2
-1
0
1
2
3
dθ/d
t
θ
Chaotic motion is not random!
Chaos is the deterministic behavior of a system displaying no discernable regularity
20
Case 4: Chaotic Motion
0 20 40 60 80 100120140160180200220240-25
-20
-15
-10
-5
0
5
10
15 θ(0)=1.0, α=0.2, f=0.7, ω=0.66 θ(0)=1.00001, α=0.2, f=0.7, ω=0.66
θ(t)
time
A chaotic system is one with an extremely high sensitivity to parameters or initial conditions
The sensitivity to even miniscule changes is so high that, in practice, it is impossible to predict the long range behavior unless the parameters are known to infinite precision (which they never are in practice)
21
Measuring Chaos
How do we know if a system is chaotic?
The most important characteristic of chaos is sensitivity to initial conditions.
Sensitivity to initial conditions implies that our ability to make numerical predictions of its trajectory is limited.
-24-22-20-18-16-14-12-10-8 -6 -4 -2 0 2 4 6 8 10-3
-2
-1
0
1
2
3
dθ/d
t
θ
22
How can we quantify this lack of predictably?
This divergence of the trajectories can be described by the Lyapunov exponent λ, which is defined by the relation:
where Δxn is the difference between the trajectories at time n.
If the Lyapunov exponent λ is positive, then nearby trajectories diverge exponentially.
Chaotic behavior is characterized by the exponential divergence of nearby trajectories.
nexxnλ
0Δ=Δ
23
nexxnλ
0Δ=Δ
24
Chaotic structure in phase space1. Limit cycles: ellipse-like figures with
frequencies greater then
2. Strange attractors: well-defined, yet complicated semi-periodic behavior. Those are highly sensitive to initial conditions. Even after millions of observations, the motion remains attracted to those paths
3. Predictable attractors: well-defined, yet fairy simple periodic behaviors that not particularly sensitive to initial conditions
4. Chaotic paths: regions of phase space that appear as filled-in bands rather then lines
0ω-24-22-20-18-16-14-12-10-8 -6 -4 -2 0 2 4 6 8 10
-3
-2
-1
0
1
2
3
dθ/d
t
θ

5
25
The Lorenz Model & the butterfly effectIn 1962 Lorenz was looking for a simple model for weather predictions and simplified the heat-transport equations to the three equations
The solution of these simple nonlinear equations gave the complicated behavior that has led to the modern interest in chaos
zxydtdz
yxxzdtdy
xydtdx
38
28
)(10
−=
−+−=
−=
26
Example
27
Hamiltonian ChaosThe Hamiltonian for a particle in a potential
for N particles – 3N degrees of freedom
Examples: the solar system, particles in EM fields, ...more specific example: the rings of Saturn
Attention: no dissipation!
Constants of motion: Energy, Momentum (linear, angular)
When a number of degrees of freedom becomes large, the possibility of chaotic behavior becomes more likely.
),,()(21 222 zyxVpppm
H zyx +++=
28
Summary
The simple systems can exhibit complex behavior Chaotic systems exhibit extreme sensitivity to initial conditions.
29
PracticeDuffing Oscillator
Write a program to solve the Duffing model. Is there a parametric region in where the system is chaotic
),,( ωα f
)cos()1(21 2
2
2
tfxxdtdx
dtxd ωα =−−+
30
Fourier Analysis of Nonlinear Oscillations
The traditional tool for decomposing both periodic and non-periodic motions into an infinite number of harmonic functions
It has the distinguishing characteristic of generating a periodic approximations

6
31
Fourier series
For a periodic function
one may write
The Fourier series is a “best fit” in the least square sense of data fitting
)()( tyTty =+
( ),)sin()cos(2
)(1
0 ∑∞
=
++=n
nn tnbtnaaty ωω
A general function may contain infinite number of components. In practice a good approximation is possible with about 10 harmonics
Tπω 2=
32
Coefficients:
the coefficients are determined by the standard technique for orthogonal function expansion
T
dttytnT
b
dttytnT
a
T
n
T
n
πω
ω
ω
2
,)()sin(2
,)()cos(2
0
0
=
=
=
∫
∫
33
Fourier transform
The right tool for non-periodic functions
and the inverse transform is
a plot of versus is called the power spectrum
∫+∞
∞−
= ωωπ
ω deYty ti)(21)(
∫+∞
∞−
−= dtetyY tiω
πω )(
21)(
2)(ωY ω
34
Spectral function
If represent the response of some system as a function of time, is a spectral function that measures the amount of frequency making up this response
)(ty)(ωY
ω
35
Methods to calculate Fourier transform
Analytically
Direct numerical integration
Discrete Fourier transform (for functions that are known only for a finite number of times tkFast Fourier transform (FFT)
36
Discrete Fourier transform
Assume that a function y(t) is sampled at a discrete number of N+1 points, and these times are evenly spaced
Let T is the time period for the sampling:a function y(t) is periodic with T, y(t+T)=y(t)
The largest frequency for this time interval isand T/21 πω = )/(2/21 NhnTnnn ππωω ===

7
37
Discrete Fourier transform
The discrete Fourier transform, after applying a trapezoid rule
k
N
k
Nkniti
n yehdttyeY n ∑∫=
−∞
∞−
− ==1
2
2)(
21)(
πω
ππω
)(2)(21)(
1
2
n
N
n
hNntiti Ye
hNdYety n ωπωω
π
πω ∑∫
=
∞
∞−
==
38
DFT in terms of separate real and imaginary parts
))]Re()/2sin()Im()/2(cos(
))Im()/2sin(
)Re()/2[(cos(2
)(1
k
k
k
k
N
kn
yNknyNkni
yNkn
yNknhY
ππ
π
ππ
ω
−++
= ∑=
)sin()cos( xixeix +=
39
Practice for the simple pendulum
Decompose your numerical solutions into a Fourier series. Evaluate contribution from the first 10 terms
Evaluate the power spectrum from your numerical solutions
Solve the simple pendulum for harmonic motion, beats, and chaotic motion (the dissipation and driven forces are included)