Nonlinear Control Systems 3. - Ordinary Differential...
33
Nonlinear Control Systems 3. - Ordinary Differential Equations Dept. of Electrical Engineering Department of Electrical Engineering University of Notre Dame, USA EE67598-02 Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 1 / 33
Transcript of Nonlinear Control Systems 3. - Ordinary Differential...

Nonlinear Control Systems3. - Ordinary Differential Equations
Dept. of Electrical Engineering
Department of Electrical EngineeringUniversity of Notre Dame, USA
EE67598-02
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 1 / 33

Dynamical Systems
Consider a continuous-time dynamical system (X ,R, φ) whereφ : R× X → X is a continuous map such that φ(0, p) = p andφ(s + t, p) = φ(s, φ(t, p)).
Define the partial map Φt : X → X called the system’s flow whereΦt(p) = φ(t; p).
Define the partial map ξp : R→ X called the system’s trajectory fromp that takes values ξp(t) = φ(t; p) for any p ∈ X and t ∈ R.
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 2 / 33

Uniqueness of Trajectories
Consider the dynamical system (X ,R, φ) and assume there are twostates q1, q2 ∈ X and p ∈ X such that
φ(t, p) = q1 6= q2 = φ(t, p)
Since we can go forward or backward in time, then
φ(−t, q1) = p = φ(−t, q2)
So consider a trajectory where we go from q1 to p to q2. This wouldmean by the group property of φ that
q2 = φ(t, φ(−t, q1)) = φ(t − t, q1) = φ(0, q1) = q1
This contradicts the assumption that q1 6= q2 which implies theuniqueness of ξp.
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 3 / 33

Orbits
For any p ∈ X , we define the set
Ωp = y ∈ X : y = ξp(t) for any t ∈ R
is called the orbit of p.
We introduce a binary relation ∼ such that for any p, q ∈ X thatp ∼ q if and only if q ∈ Ωp.
Clearly ∼ is reflexive, symmetric, and transitive, so that ∼ is anequivalence relation.
The equivalence classes of ∼ are the orbits of the system
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 4 / 33

Smooth Dynamical Systems
Consider the map f : X → Y from X ⊂ Rn into Y ⊂ Rm. This mapf is (C k) differentiable if each of its component functions fi : X → Ris C k for i = 1, 2 . . . , n.
The map f : X → Y is a diffeomorphism if both f and f −1 : Y → Xare differentiable mappings.
The dynamical system (X ,R, φ) is (C k) smooth if φ is a (C k)differentiable mapping.
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 5 / 33

Smooth Dynamical Systems and IVP
Given a smooth dynamical system φ, we define f : X → x of the flowΦt at a point p ∈ X as
f (p) :=d
dt
∣∣∣∣t=0
Φt(p)
We let x(t; x0) = ξx0(t) denote a trajectory of φ, then thecomponents of f may be written as
fi (x(t)) =dxi (t)
dt:= xi (t)
where x(0) = x0
This means that the trajectory x(t; x0) satisfies the initial valueproblem (IVP)
x(t) = f (x(t)), x(0) = x0
This shows that the trajectories of any smooth dynamical system maybe implicitly represent as a solution to an ordinary differentialequation. The converse, however, may not always be true.
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 6 / 33

IVP with no C 1 solution
As an example of a differential equation for which a solution may notexist, let us consider an IVP of the following form,
x(t) =
1 x(t) ≤ 0−1 x(t) > 0
, x(0) = 0
At the initial time, x(0) is zero and so x(0) = 1. So an infinitesimaltime after 0 we find x(ε) > 0 which means that x(ε) = −1. Thiswould immediately force x to go back to zero again, but as soon as itdoes, x shifts back to being positive.
In other words, this differential equation appears to force the systemto chatter back and forth between being positive and zero; a solutionthat is definitely not smooth
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 7 / 33

ODE with finite escape
consider the IVP
x(t) = −x2(t), x(0) = −1
This is a reasonable ODE that may fit some physical process.
This is a separable equation, so we can rewrite it as
t = −∫ x
x0
dx
x2=
1
x− 1
x0=
1
x+ 1
which implies that for t > 0 that
x(t) =1
t − 1
This trajectory only exists over the time interval [0, 1) and so it failsto generate a smooth dynamical system φ, since we define φ over alltime.
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 8 / 33

IVP with nonunique solution
The last example we’ll consider is the IVP,
x(t) = x1/3, x(0) = 0
This IVP has two continuously differentiable solutions. The trivial
trajectory x(t) = 0 satisfies the ODE and the function x(t) =(
2t3
)3/2
also satisfies the ODE.
This is problematic for us as well since we already know that smoothdynamical systems, φ, must generate unique trajectories by theorem??.
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 9 / 33

Existence of Solutions to IVP
Consider the initial value problem
x = f (t, x), x(t0) = x0 (1)
where f ∈ C (U,Rn) and U is an open subset of Rn+1 with(t0, x0) ∈ U.
We first note that integrating both sides of this equation with respectto t shows that the IVP is equivalent to the following integralequation
x(t) = x0 +
∫ t
0f (s, x(s))ds (2)
Let x : R→ X be a C 1 solution to the IVP in the sense that itsatisfies the above integral equation and note that
x(h) = x0 + x(0)h + o(h) = x0 + f (0, x0)h + o(h) := xh + o(h)
where o(h)h → 0 as h→ 0.
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 10 / 33

Existence of IVP Solutions
This suggests that an approximate solution to the IVP might beobtained by omitting the error term to construct the recursiveprocedure
xh(tm+1) = xh(tm) + f (tm, xh(tm))h, tm = mh
This procedure is known as Euler’s method.
We expect xh(t) to converge to the actual trajectory as h ↓ 0.
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 11 / 33

Equicontinuous Functions an the Arzela-Ascoli Theorem
A set of functions xmm∈N is equicontinuous if for all ε > 0 there isδ > 0 (independent of m) such that
|t − s| ≤ δ ⇒ |xm(t)− xm(s)| ≤ ε
Key thing is independent of δ from m, so that equicontinuity may beviewed as the notion of uniform continuity for a family of functions(rather than a single one).
The Arzela-Ascoli theorem is the main tool we’ll need.
Theorem 1
(Arzela-Ascoli) Suppose the set of functions xm(t)m∈N in C (I ,Rn)where I is a compact interval is equicontinuous. If the sequence xm isbounded, then there is a uniformly convergent subsequence.
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 12 / 33

Existence of IVP Solutions
To prove the existence of IVP solutions, we consider a sequence xh ofEuler solutions and show that this set is equicontinuous and bounded,thereby allowing us to establish the existence of a subsequential limit forxhi. We then show that this limit indeed satisfies the integral equationcharacterizing solutions to the IVP.
Theorem 2
(Peano) Suppose f is continuous on V = [t0, t0 + T ]× Nδ(x0) anddenote the maximum of |f | on V as M. Then there exists at least onesolution of the IVP for t ∈ [t0, t0 + T0] which remains in Nδ(x0) whereT0 = minT , δ/M. The analogous assertion holds for the interval[t0 − T0, t0].
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 13 / 33

Proof of Peano Theorem
First select δ,T > 0 so that
V = [t0, t0 + T ]× Nδ(x0) is compact
Define the family xh as
xh(t) = x0 +m−1∑j=0
∫ tj+1
tj
f (tj ; xh(tj))χ(s)ds
where t0, t1, . . . , tm is sequence of times such that tm = t andh = tj+1 − tj .
Since f is continuous on a compact set, it attains its maximum
M = maxV|f (t, x)|
and so f is uniformly bounded on V .
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 14 / 33

Proof of Peano Theorem (2)
From the definition of xh(t), we can show |xh(t)− xh(s)| ≤ M|t − s|and so xh is equicontinuous and bounded and there exists asubsequential limit x(t)
What is that limit? Define ∆(h) as
|f (t, y)− f (t, x)| ≤ ∆(h) when |y − x | < M and |s − t| < h
Note that ∣∣∣∣xh(t)− x0 −∫ t
t0
f (t0, xh)ds
∣∣∣∣ ≤ |t − t0|∆(h)
and since ∆(h)→ 0 as h→ 0
This implies xh(t) is uniformly continuous and so
x(t) = x0 + limh→0
∫ t
0f (s, xh(s))ds
= x0 +
∫ t
0f (s, x(s))ds
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 15 / 33

Lipschitz Condition
Consider a function f : D → Rn with D ⊂ Rn. f is locally Lipschitzat x on D if there exists a neighborhood, D0, and a constant L ≥ 0such that
|f (x)− f (y)| ≤ L|x − y | for all y ∈ D0
If it is uniformly Lipschitz on D (i.e. same constant L for any x ∈ D)then we say f is Lipschitz in D.
If D is convex we can use the matrix norm of f ’s Jacobian matrix as alower bound on the Lipschitz constant∥∥∥∥[∂f∂x
]∥∥∥∥ ≤ L
If f is Lipschitz, then the IVP solution is unique. We prove this usinga technical tool known as the contraction mapping principle.
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 16 / 33

Contraction Mapping Principle
Given a map G : X → Y where
‖G [x ]− G [y ]‖ ≤ γ‖x − y‖
then G is a contraction mapping if γ < 1.
Contraction Mapping Principle: If X is a Banach space and S ⊂ Xwith G : S → S being a contraction mapping then there is a uniquex∗ ∈ X such that x∗ = G [x∗].
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 17 / 33

Outline of Proof for Contraction Mapping Principle
Proof is based on fact that Cauchy sequences are convergent in aBanach space. We define a sequence of ”approximations” to x∗ bythe recursive equation xk+1 = G [xk ].
Compute the single step difference
‖xk+1 − xk‖ = ‖G [xk ]− G [xk−1]‖ ≤ γ‖xk − xk−1‖≤ γ2‖xk−1 − xk−2‖ ≤ · · · ≤ γk−1‖x2 − x1‖
Then look at the Cauchy condition
‖xk+r − xk‖ ≤ ‖xk+r − xk+r−1‖+ · · ·+ ‖xk+1 − xk‖
= (γk+r−2 + · · ·+ γk−1)‖x2 − x1‖ =γk−1
1− γ‖x2 − x1‖
which means xk is Cauchy for γ < 1.
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 18 / 33

Uniqueness of IVP Solutions
To establish local uniqueness of solutions to IVP, we consider a mapG : L∞ → L∞ and the sequence G k [x ]
G [x ](t)− x0 =
∫ t
0f (s, x(s))ds
Due to the Lipschitz condition
|G [x ](t)− G [y ](t)| <
∣∣∣∣∫ t
0(f (s, x(s))− f (s, y(s)))ds
∣∣∣∣≤ LT‖x − y‖L∞
Since this holds for all t, we see ‖G [x ]− G [y ]‖L∞ ≤ LT‖x − y‖L∞So G is a contraction mapping if the interval, T , of existence for thelocal solution is less than 1/L, which implies the existence of a uniquelocal fixed point for G
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 19 / 33

Global Uniqueness
Preceding uniqueness result is only local, we need unique globalsolutions since this is what we get with our smooth dynamical systemφ.
One approach is to apply the local result and get an interval ofexistence T1, then use x(T1) as the initial condition and apply thelocal result again. This generates a sequence Ti of intervals, thatmay unfortunately converge to a finite result.
Another approach would be to strength the local Lipschitz conditionto a global one, but that is extremely restrictive since systems likex = −x3 are not globally Lipschitz, yet they have global solutions.
The last approach is to require all solutions to lie in a compact setand use the fact that ”compact” sets are well behaved as theybecome infinite.
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 20 / 33

Global Uniqueness - Compact
Theorem 3
Let f (t, x) be piecewise continuous in t and locally Lipschitz in x for allt ≥ 0 and all x in a domain D ⊂ Rn. Let W be a compact subset of Dwith x0 ∈W and suppose it is known that every solution of the IVP liesentirely in W , then there is a unique solution defined for all t ≥ 0.
Proof: Assume interval of existence of T is finite, then x(T ) must leaveany compact subset of D since x(T ) is a limit point of the trajectory andW must contain its limit points (it is compact). This contradicts theassumption that T is finite and so T must be infinite. ♦
How do we chose trajectories are compact? Example x = −x3 wherex(0) = a. Easy to see that x(t) never leaves the set [−|a|, |a|], which iscompact.
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 21 / 33

Sensitivity to IVP Data
Our other concern is whether the solutions are sensitive to variationsin the problem data.
This is a practical concerns for we rarely know the vector field of realsystem and there may be uncertainty in our initial conditions.Moreover, if we use the computer to numerically integrate a system,that numerical integration is a perturbation of the actual system - sowe want to make sure that the quality of our solutions does notcatastrophically change when our model or initial conditions areslightly off.
The basis for studying the sensitivity of our solutions is theGronwall-Bellman inequality
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 22 / 33

Gronwall Bellman Inequality
Theorem 4
(Gronwall-Bellman) Let λ : [a, b]→ R be continuous and letµ : [a, b]→ R be continuous and non-negative. If a continuous functiony : [a, b]→ R satisfies
y(t) ≤ λ(t) +
∫ t
aµ(s)y(s)ds (3)
for t ∈ [a, b], then on the same interval
y(t) ≤ λ(t) +
∫ t
0λ(s)µ(s)e
∫ ts µ(τ)dτds (4)
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 23 / 33

Gronwall-Bellman Inequality (2)
What does it mean? The first condition is an inequality similar to ourintegral solution of ODE (with y on both sides of inequality). Thesecond condition bounds y in terms of things we know. So we canuse this to obtain an upper bound on the error.
Proof is a straightforward computational exercise.
Note we can use it to prove uniqueness
|x1(t)− x2(t)| ≤∣∣∣∣∫ t
0[f (s, x1(s))− f (s, x2(s))] ds
∣∣∣∣≤
∫ t
0|f (s, x1(s))− f (s, x2(s))| ds
≤∫ t
0L |x1(s)− x2(s)| ds
We apply Gronwall Bellman to see that y(t) = |x1(t)− x2(t)| ≤ 0which implies x1 = x2
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 24 / 33

Sensitivity of Solutions
Theorem 5
Let f (t, x) be piecewise continuous in t and Lipschitz in x on [t0,T ]×Wwith Lipschtiz constant L, where W ⊂ Rn is an open connected set. Lety : R→ Rn and z : R→ Rn be solutions of
y = f (t, y), y(t0) = y0 and z = f (t, z) + g(t, z), z(t0) = z0
respectively with y(t), z(t) ∈W for all t ∈ [t0,T ]. Suppose there existsµ > 0 such that
|g(t, x)| ≤ µ for all (t, x) ∈ [t0,T ]×W
and suppose |y0 − z0| ≤ γ. Then for all t ∈ [t0,T ],
|y(t)− z(t)| ≤ γeL(t−t0) +µ
L
(eL(t−t0) − 1
)Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 25 / 33

Sensitivity of Solutions - proof
Note that
|y(t)− z(t)| ≤ |y0 − z0|+∫ t
t0
|f (s, y(s))− f (s, z(s))|ds +
∫ t
t0
|g(s, z(s))|ds
≤ γ + µ(t − t0) +
∫ t
t0
L|y(s)− z(s)|ds
Applying the Gronwall-Bellman inequality to the function|y(t)− z(t)| yields,
|y(t)− z(t)| ≤ γ + µ(t − t0) +
∫ t
t0
L(γ + µ(s − t0))eL(t−s)ds
Integrating the right hand side by parts yields,
|y(t)− z(t)| ≤ γeL(t−t0) +µ
L
(eL(t−t0) − 1
)which completes the proof
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 26 / 33

Comparison Theorem
Theorem 6
(Comparison Principle) Consider the scalar differential equation
u(t) = f (t, u(t))
with initial condition u(0) = u0 with f being continuous in t and locallyLipschitz in u for all t ≥ 0. Let [0,T ) be the maximum interval ofexistence of u. Let v be a continuous function whose Dini derivativesatisfies
D+[v ](t) ≤ f (t, v(t))
with v(0) < u0. Then v(t) ≤ u(t) for all t ∈ [t0,T ).
This is stated for Dini derivative, which allows us to apply it to f that arenot differentiable everywhere. We will only consider differentiable case.
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 27 / 33

Example - unforced
Consider the scalar differential equation
x(t) = f (x(t)) = −(1 + x2)x , x(0) = a
Let v(t) = x2(t) and its time derivative is
v(t) = 2x(t)x(t) = −2x(1 + x2)x = −2x2 − 2x4 ≤ −2x2
So v satisfies the differential inequality
v(t) ≤ −2v(t), v(0) = a2
Let u(t) = a2e−2t be the solution to the differential equation
u(t) = −2u(t), u(0) = a2
By the comparison principle v(t) ≤ a2e−2t which implies|x(t)| =
√v(t) ≤ e−t |a|
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 28 / 33

Example - forced
Now consider
x = −(1 + x2)x + et , x(0) = a
Using v(x) = x2 will not help since comparison system is too hard tosolve
Select v(t) = |x(t)| then
v(t) =d
dt
√x2 = −|x |(1 + x2) +
x
|x |et
Since 1 + x2 ≥ 1, we can see that −|x |(1 + x2) ≤ −|x | which implies
v ≤ −v(t) + et
Which is linear with solution
v(t) = |x(t)| ≤ e−t |a|+ 1
2(et − e−t)
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 29 / 33

Solution Concepts for Nonsmooth ODEs
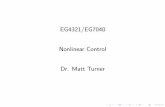
When the system is not smooth, this does not mean the ODE is notuseful. Many physical systems are best seen as ”switched” systems whoseright hand side is discontinuous.
S0
S+
S-
S0
S+
S-
S0
S+
S-
Figure: Switching Surfaces
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 30 / 33

Fillipov solution concept
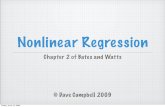
We need a new solution concept for the ”chattering” case.
assume that the ”switched differential equation” is the limit as∆→ 0 of a hysteretic switching mechanism.
The ”sliding” solution occurs as we let ε→ 0.
The ”sliding” solution is said to solve the differential equation in thesense of Fillipov.
s(x)
1
-1
-Δ Δ
S0 SΔS-Δ
Hysteretic switching mechanism
Effect of regularization on switching
S0
S+
S-
f+(x)
f-(x)
f0(x)
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 31 / 33

Summary
Every smooth dynamical system (X ,R, φ) can be represented by anODE
We use integral solution concept x(t) = x0 +∫f (x(s))ds.
Not all ODE’s give rise to a smooth system. In particular,
If f is continuous there exists at least one solutionIf f is locally Lipschitz then there is a unique local solutionIf f is locally Lipschitz and trajectories are compact then solution isglobal
Use Gronwall-Bellman inequality to estimate sensitivity of solutions touncertainty in f and initial conditions
Use comparison principle to bound solution of ODE by solution ofanother ODE
Fillipov solution concepts for ODE with discontinuous RHS
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 32 / 33

Summary
We saw in Peano (existence) theorem, the importance ofsubsequential limits (compactness)
We also also saw in local uniqueness theorem (Lipschitz) thatconvergent Cauchy sequences also played a role in establishing theexistence of certain functions.
These both rely, in some sense, on the notion of compactness.
The next chapter uses these tools in a more sophisticated manner toestablish existence of ”coordinate transformations” between ”relatednonlinear systems”
The theorems from that chapter (Hartman-Großman and CenterManifold) represent major tools used to ”reduce” nonlinear systemsto canonical (normal) forms for which we will later design feedbackcontrols.
Dept. of Electrical Engineering (ND) Nonlinear Control Systems 3. - Ordinary Differential Equations EE67598-02 33 / 33