Non-identifier based adaptive control in mechatronics€¦ · Non-identifier based adaptive...
24
Non-identifier based adaptive control in mechatronics 3.3 Adaptive λ-tracking control and funnel control (with derivative feedback) Christoph Hackl Munich School of Engineering (MSE) Research group “Control of renewable energy systems (CRES)” www.cres.mse.tum.de Lecture & tutorial 24.06.2016 C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 1/20
-
Upload
trinhquynh -
Category
Documents
-
view
226 -
download
0
Transcript of Non-identifier based adaptive control in mechatronics€¦ · Non-identifier based adaptive...

Non-identifier based adaptive control in mechatronics3.3 Adaptive λ-tracking control and funnel control (with derivative feedback)
Christoph Hackl
Munich School of Engineering (MSE)Research group “Control of renewable energy systems (CRES)”
www.cres.mse.tum.de
Lecture & tutorial24.06.2016
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 1/20

IntroductionSchedule (tentative)
Date Content
15.04.2016 1. Introduction and2. Non-identifier based speed control (relative-degree-one case)2.1 High-gain adaptive stabilization
22.04.2016 2.2 High-gain adaptive tracking (using internal models) and2.3 Adaptive λ-tracking control and funnel control
29.04.2016 Tutorials for Lectures 2.1-2.306.05.2016 canceled (Christi Himmelfahrt)13.05.2016 2.4 Practical course (relative-degree-one case)20.05.2016 2.4 Practical course (relative-degree-one case) [contd.]27.05.2016 2.4 Practical course (relative-degree-one case) [contd.]03.06.2016 2.1 & 2.3 Proofs of high-gain adaptive stabilization & funnel control10.06.2016 2.5 Applications: Speed control of electrical drives (and some new results)
3. Non-identifier based adaptive position control (relative-degree-two case)17.06.2016 3.1 High-gain adaptive stabilization and & 3.2 High-gain adaptive tracking24.06.2016 3.3 Adaptive λ-tracking control and funnel control (with derivative feedback)01.07.2016 3.4 Practical course (relative-degree-two case)08.07.2016 3.5 Application: Position funnel control of servo-systems & industrial robots15.07.2016 4. Conclusions & exam revision
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 2/20

Outline
3 Non-identifier based adaptive position control3.3 Adaptive λ-tracking control and funnel control (with derivative feedback)
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 3/20

Outline
3 Non-identifier based adaptive position control3.3 Adaptive λ-tracking control and funnel control (with derivative feedback)
MotivationAdaptive λ-tracking control with derivative feedbackFunnel control with derivative feedback
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 3/20

Outline
3 Non-identifier based adaptive position control3.3 Adaptive λ-tracking control and funnel control (with derivative feedback)
MotivationAdaptive λ-tracking control with derivative feedbackFunnel control with derivative feedback
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 3/20

MotivationNonlinear model of stiffly coupled servo-system
Drive (mM ) Load (mL)
φ, ω
Θhkkkkkkkikkkkkkkj
ddt
“:xptqhkkkikkkj
ˆ
φptqωptq
˙
“
“:Ahkkkkkkkkkkkikkkkkkkkkkkj
«
0 1
0 ´ν1`ν2{g
2r
Θ
ff
ˆ
φptqωptq
˙
`
“:bhkkikkj
ˆ
0kAΘ
˙
satpuA
`
uptq ` uAptq˘
´
ˆ
01Θ
˙
´
pF1ωqptq `1gr
`
mLptq ` pF2ωgrqptq
˘
¯
yptq “`
1 0˘
loomoon
“:cJ
xptq, pφp0q, ωp0qqJ“ pφ0, ω0q
J
,
/
/
/
/
/
/
/
/
/
/
/
.
/
/
/
/
/
/
/
/
/
/
/
-
(1MSφ)
whereΘ ą 0, gr P Rzt0u, ν1, ν2 ě 0, uA, kA ą 0, uAp¨q, mLp¨q P L8pRě0;Rq,
and @ i P t1, 2u : Fi : CpRě0;Rq Ñ L8pRě0;Rq.
+
(1MSφ-Data)
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 4/20

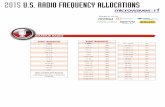
MotivationGain drift: High-gain adaptive control with noise & disturbances
time t [s]0 10 20 30 40 50
−0.5
0
0.5
1
1.5
Zoom
0 501.16
1.17
1.18
(a) due to noise nmp¨q PW2,8pRě0;Rq
(udp¨q “ 0): kp¨q, yp¨q.
time t [s]0 10 20 30 40 50
−1
0
1
2
3
4
(b) due to disturbanceudp¨q P L8pRě0;Rq(nmp¨q “ 0): kp¨q and yp¨q.
System
:yptq “ uptq ` udptqymptq “ yptq ` nmptq
,pyp0q, 9yp0qq “ p1, 0q, udp¨q P L8pRě0;Rq,nmp¨q PW2,8
pRě0;Rqunder control of
uptq “ ´kptq2yptq ´ 2kptq 9yptq where 9kptq “ exp
ˆ
´kptq
100
˙
‖ˆ
yptq9yptq
˙
‖2, kp0q “ 1.
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 5/20

MotivationTypical position reference (qualitative)
Time t [s]
Reference
&D
eriv
ativ
es
0 2 4 6 8−1
−0, 5
0
0, 5
1
1, 5
2
yrefp¨q, 9yrefp¨q, :yrefp¨q
ùñ A single internal model does not exist!
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 6/20

MotivationMore realistic scenarios
‚ Motivation 1: high-gain adaptive controllers not robust (gain drift due tonoisy measurements or external disturbances)
‚ Motivation 2: System class S lin2 is restrictive (e.g. (1MSφ) R S lin
2 )˝ admissible systems are linear˝ no (external) disturbances (possibly piecewise continuous!)˝ no (nonlinear) perturbations
‚ Motivation 3: reference tracking not considered (only stabilization, or forcertain reference signals, asymptotic tracking with internal models)
Hence, we need‚ a broader system class ùñ S2
‚ a wider class of admissible reference signals ùñW2,8pRě0;Rq (see
Tutorial)‚ more robust controllers (for real world application, noise being admissible)
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 7/20

Definition (see Definition 1.7)Let n,m P N, h ě 0, pA, b, cq P Rnˆn ˆ Rn ˆ Rn and BT P Rnˆm. A system of form
9xptq “ Axptq ` b`
uptq ` udptq˘
`BT
`
pTxqptq ` dptq˘
yptq “ cJxptq, x|r´h,0s “ x
0p¨q P C
`
r´h, 0s; Rn˘
,
.
-
(1)
with disturbances ud : r´h,8q Ñ R and d : r´h,8q Ñ Rm, operatorT : Cpr´h,8q;Rnq Ñ L8pRě0;R
mq, control input u : Rě0 Ñ R and regulated output
yp¨q, is of Class S2 if, and only if, the following hold:(S2-sp1) the relative degree is two and the sign of the high-frequency gain is known, i.e.
cJb “ 0, c
JBT “ 0
Jm, γ0 :“ c
JAb ‰ 0 and signpγ0q known;
(S2-sp2) the unperturbed system is minimum-phase (see (S1-sp2));
(S2-sp3) the operator is of class T and globally bounded (see (S1-sp3));
(S2-sp4) the disturbances are bounded (see (S1-sp4));
(S2-sp5) feedback of the regulated output and its derivative is admissible, i.e. yp¨q and 9yp¨q areavailable for feedback.
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 8/20

Outline
3 Non-identifier based adaptive position control3.3 Adaptive λ-tracking control and funnel control (with derivative feedback)
MotivationAdaptive λ-tracking control with derivative feedbackFunnel control with derivative feedback
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 8/20

Adaptive λ-tracking control (see [1, Theorem 3.13])
ep¨q “ yrefp¨q ´ yp¨qep0q
λ
´λ
¨ ¨ ¨
λ-strip
time t rss
‚ Controller & gain adaption
uptq “ kptq2eptq ` q1kptq 9eptq where (LT2)
9kptq “ q2 exp p´q3q4kptqq dλ
˜∥∥∥∥∥˜
eptq9eptqkptq
¸∥∥∥∥∥¸q4
‚ with tuning parameters kp0q “ k0, q1, q2, q3 ą 0, q4 ě 2.C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 9/20

Adaptive λ-tracking control (see [1, Theorem 3.13])
ep¨q “ yrefp¨q ´ yp¨qep0q
λ
´λ
¨ ¨ ¨
λ-strip
time t rss
‚ tracking with prescribed asymptotic accuracy, i.e. for all λ ą 0, tracking error eptqand 9eptq{kptq asymptotically converge into the “λ-strip”, i.e.
limtÑ8
dist´
‖peptq, 9eptq{kptqq‖, r0, λs¯
“ 0;
‚ state variable is bounded, i.e. xp¨q P L8pRě0;Rnq;
‚ control action is bounded, i.e. up¨q P L8pRě0;Rq.C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 10/20

Outline
3 Non-identifier based adaptive position control3.3 Adaptive λ-tracking control and funnel control (with derivative feedback)
MotivationAdaptive λ-tracking control with derivative feedbackFunnel control with derivative feedback
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 10/20

Funnel control with derivative feedbackMotivation for funnel control
‚ Motivation 1: Adaptive λ-tracking (and high-gain adaptive) control exhibita non-decreasing gain and so, as time tends to infinity, it is likely thate.g. noise sensitivity permanently exceeds an acceptable level (if gainadaption is not stopped).
‚ Motivation 2: Adaptive λ-tracking control assures tracking with prescribedasymptotic accuracy, however statements on the transient accuracy arenot possible; e.g.
˝ albeit bounded large overshoots might occur and˝ the λ-strip is not reached in finite time (in general)
‚ Motivation 3: Input saturations are not yet considered (e.g. actuatorsaturation of electrical drives) [in next lecture].
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 11/20

Funnel control with derivative feedbackControl objective
‚ ‘tracking with prescribed transient behavior’ for yrefp¨q PW2,8pRě0;Rq, i.e.
@ t ě 0: |eptq| “ |yrefptq ´ yptq| ă ψ0ptq and | 9eptq| ă ψ1ptq
ep¨q
ep0q ψ0p¨q
ψ0p0q
´ψ0p0q
eptq
ψ0ptq
´λ0 9ep¨q9ep0q
ψ1p¨q
ψ1p0q
´ψ1p0q
9eptq
ψ1ptq
λ1
tt TIME t rss
funnel
‚ funnel boundary
B2 :“
#
pψ0, ψ1q : Rě0 Ñ R2
ˇ
ˇ
ˇ
ˇ
ˇ
piq @ i P t0, 1u D ci ą 0: ψip¨q PW1,8pRě0, rci,8qq,
piiq D δ ą 0 for a.a. t ě 0: ψ1ptq ě ´ddt ψ0ptq ` δ
+
(2)C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 12/20

Funnel examples
ExamplesFor Λ0 ě λ0 ą 0, TL, TE ą 0 rss and λ1 ą 0 rss define
1.ˆ
ψ0
ψ1
˙
: Rě0 Ñ R2, t ÞÑ
ˆ
ψ0ptqψ1ptq
˙
:“
ˆ
max
Λ0 ´ t{TL, λ0
(
1{TL ` λ1
˙
2.ˆ
ψ0
ψ1
˙
: Rě0 Ñ R2, t ÞÑ
ˆ
ψ0ptqψ1ptq
˙
:“
¨
˝
pΛ0 ´ λ0q exp´
´ tTE
¯
` λ0
Λ0´λ0TE
exp´
´ tTE
¯
` λ1
˛
‚.
Zeit t [s]
0 2 4 6 8 100
2
4
6
8
10
ψ0(·)
ψ1(·)
Zeit t [s]
0 2 4 6 8 100
2
4
6
8
10
ψ0(·)
ψ1(·)
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 13/20

Funnel control with derivative feedbackFunnel controller (variant 1, see [2])
ep¨q
ep0q ψ0p¨q
ψ0p0q
´ψ0p0q
eptq
ψ0ptq
´λ0 9ep¨q9ep0q
ψ1p¨q
ψ1p0q
´ψ1p0q
9eptq
ψ1ptq
λ1
tt TIME t rss
funnel
uptq “ k0ptq2eptq
loooomoooon
P
` k0ptqk1ptq 9eptqlooooooomooooooon
D
` uF ptqloomoon
e.g. feed forward
(FC‹2)
‚ k0ptq “1
ψ0ptq´|eptq|and k1ptq “
1ψ1ptq´| 9eptq|
‚ uF p¨q P L8pRě0;Rq‚ @ i P t0, 1u Dci ą 0: ςip¨q PW1,8
pRě0; rci,8qqC. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 14/20

Funnel control with derivative feedbackFunnel controller (variant 2, see [1, Theorem 4.13])
ep¨q
ep0q ψ0p¨q
ψ0p0q
´ψ0p0q
eptq
ψ0ptq
´λ0 9ep¨q9ep0q
ψ1p¨q
ψ1p0q
´ψ1p0q
9eptq
ψ1ptq
λ1
tt TIME t rss
funnel
uptq “ k0ptq2eptq
loooomoooon
P
` k0ptqk1ptq 9eptqlooooooomooooooon
D
` uF ptqloomoon
e.g. feed forward
(FC2)
‚ k0ptq “ς0ptq
ψ0ptq´|eptq|and k1ptq “
ς1ptq
ψ1ptq´| 9eptq|
‚ uF p¨q P L8pRě0;Rq‚ @ i P t0, 1u Dci ą 0: ςip¨q PW1,8
pRě0; rci,8qqC. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 15/20

Funnel control with derivative feedbackImplementation at laboratory setup
test benchimplementation
e
9e
nm
9nm
φ
ω
y “ φ ` nm
9y “ ω ` 9nm
yref “ φref
9yref “ ωrefu “ mM
´
´
P
D
mLdrive load
uptq “ k0ptq2 eptq
loooomoooon
P
` k0ptqk1ptq 9eptqlooooooomooooooon
D
(FC‹2)
uptq “ k0ptq2 eptq
loooomoooon
P
` k0ptqk1ptq 9eptqlooooooomooooooon
D
where k1ptq ě2?γ0
(FC2)
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 16/20

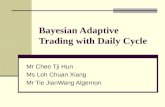
Measurement results (1MS): (FC‹2), (FC2)
Position
(Win
kel)
φ+n
m[π
rad]
0
1
2
3
4
5
φref (·) φref (·) ±ψ0(·)
Ges
chw
indig
keit
ω+n
m[π
rad/s]
−9
−6
−3
0
3
6
9
ωref (·) ωref(·) ±ψ1(·)
Zeit t [s]
Moto
rmom
ent
mM
[Nm
]
0 5 10 15 20 25 30 35 40 45 50
−5
0
5
10
15
20
−mL(·)
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 17/20

Measurement results (1MS): (FC‹2), (FC2)
Positionsfeh
ler
e[π
rad]
−0.1
−0.05
0
0.05
0.1
±ψ0(·)
P-V
erst
ark
ung
k2 0
[Nm
/ra
d]
0
20
40
60
80
Ges
chw
.-Feh
ler
e[π
rad/s]
−3−2−1
0123
±ψ1(·)
Zeit t [s]
D-V
erst
ark
ung
k1,k0k1
[Nm
s/ra
d]
0 5 10 15 20 25 30 35 40 45 500
5
10
15
20
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 18/20

Theorem (Funnel position control of unsaturated 1MS)Consider the mechatronic system (1MSφ) with (1MSφ-Data) and uA “ 8 (unsaturated actuator).Then, for any funnel boundary pψ0p¨q, ψ1p¨qq P B2, gain scaling function ς0p¨q, ς1p¨q P B1,reference signal yrefp¨q PW2,8
pRě0;Rq and initial value pφp0q, ωp0qq “ pφ0, ω0q P R2,satisfying
|yrefp0q ´ φp0q| ă ψ0p0q and | 9yrefp0q ´ ωp0q| ă ψ1p0q, (FC2-init)
the funnel controller
uptq “ k0ptq2eptq ` k0ptqk1ptq 9eptq where eptq “ yrefptq ´ yptq,
k0ptq “ς0ptq
ψ0ptq ´ |eptq|and k1ptq “
ς1ptq
ψ1ptq ´ | 9eptq|
,
.
-
(FC2)
applied to (1MSφ) yields a closed-loop initial-value problem with the properties:
(i) there exists a unique solution pφ, ωq : r0, T q Ñ R with maximal T P p0,8s;
(ii) the solution pφp¨q, ωp¨qq does not have finite escape time, i.e. T “ 8;
(iii) tracking error and its derivative are uniformly bounded away from the funnel boundary, i.e.
D ε0, ε1 ą 0 @ t ě 0 : ψ0ptq ´ |eptq| ě ε0 and ψ1ptq ´ | 9eptq| ě ε1;
(iv) gains and control action are uniformly bounded, i.e. k0p¨q, k1p¨q, up¨q P L8pRě0;Rq.
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 19/20

References I
[1] C. M. Hackl, Contributions to High-gain Adaptive Control in Mechatronics. PhD thesis, Lehrstuhl fürElektrische Antriebssysteme und Leistungselektronik, Technische Universität München (TUM), Germany,2012.
[2] C. M. Hackl, N. Hopfe, A. Ilchmann, M. Mueller, and S. Trenn, “Funnel control for systems with relativedegree two,” SIAM Journal on Control and Optimization, vol. 51, no. 2, pp. 965–995, 2013.
C. Hackl | 24.06.2016 | Non-identifier based adaptive control in mechatronics 20/20