High-Gain Observers in Nonlinear Feedback Control Lecture ... · Lecture # 4 Adaptive Control...
61
High-Gain Observers in Nonlinear Feedback Control Lecture # 4 Adaptive Control High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 1/6
Transcript of High-Gain Observers in Nonlinear Feedback Control Lecture ... · Lecture # 4 Adaptive Control...

High-Gain Observersin
Nonlinear Feedback Control
Lecture # 4Adaptive Control
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 1/61

Problem Formulation
Consider a SISO nonlinear system represented globally bythe nth-order differential equation
y(n) = f0(·) +
p∑
i=1
fi(·)θi +
(
g0 +
p∑
i=1
giθi
)
u(m)
where u is the control input, y is the measured output, y(i)
denotes the ith derivative of y, and m < n. The functionsfi are known smooth nonlinearities which could depend ony, y(1), · · ·, y(n−1), u, u(1), · · ·, u(m−1), e.g.,
f0(·) = f0(y, y(1), · · · , y(n−1), u, u(1), · · · , u(m−1))
The constant parameters g0 to gp are known, while theconstant parameters θ1 to θp are unknown
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 2/61

The vector θ = [θ1, · · · , θp]T belongs to Ω, a knowncompact convex subset of Rp. Let Ω be a convex subset ofRp which contains Ω in its interior. We assume that
(g0 + θT g) 6= 0 ∀ θ ∈ Ω
The objective is to design an adaptive output feedbackcontroller which guarantees boundedness of all variables ofthe closed-loop system, and tracking of a given referencesignal yr(t), where
YR(t) = [yr(t), y(1)r (t), · · · , y(n−1)
r (t), y(n)r (t)]T
is bounded and piecewise continuous
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 3/61

Y(t) = [y(t), y(1)(t), · · · , y(n−1)(t)]T
Yr(t) = [yr(t), y(1)r (t), · · · , y(n−1)
r (t)]T
Y ⊂ Rn and YR ⊂ Rn+1 are given compact sets
Objective: Design an adaptive output feedback controllersuch that for all Y(0) ∈ Y , for all YR(t) ∈ YR, and for allθ ∈ Ω, all variables of the closed-loop system are boundedfor all t ≥ 0, and
limt→∞
|y(t) − yr(t)| = 0
The compact sets Y , YR, and Ω are arbitrary but known
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 4/61

Augment a series of m integrators at the input side of thesystem and treat v = u(m) as the input of the augmentedsystem
z1 = u, z2 = u(1), . . . zm = u(m−1)
x1 = y, x2 = y(1), . . . xn = y(n−1)
State-space model of the augmented system:
xi = xi+1, 1 ≤ i ≤ n− 1
xn = f0(x, z) + θT f(x, z) + (g0 + θT g)v
zi = zi+1, 1 ≤ i ≤ m− 1
zm = v
y = x1
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 5/61

The initial states of the integrators are chosen such thatz(0) ∈ Z0, a compact subset of Rm
The augmented state model has relative degree n and canbe transformed into a globally-defined normal form by thechange of variables
ζi = zi −xn−m+i
g0 + θT g, 1 ≤ i ≤ m
which transforms the z-equations into
ζi = ζi+1, 1 ≤ i ≤ m− 1
ζm = − f0(x,z)+θT f(x,z)
g0+θT g
∣∣∣zi=ζi+xn−m+i/(g0+θT g)
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 6/61

Minimum Phase Assumption: For every θ ∈ Ω, the systemhas the the property that for any z(0) ∈ Z0 and anybounded x(t), the state ζ(t) is bounded
Remarks:
The restriction of the coefficient (g0 + gT θ) to beconstant is made for convenience. The result can beextended to the case when g0 and g are functions of y,y(1), · · ·, y(n−1), u, u(1), · · ·, u(m−1), provided|g0 + gT θ| is globally bounded from below
The linear dependence on the unknown parameters θ iscrucial for the derivation of the adaptive controller andmay require redefinition of the physical parameters ofthe system
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 7/61

Example: A single link manipulator with flexible joints andnegligible damping can be represented by
Iq1 +MgL sin q1 + k(q1 − q2) = 0
Jq2 − k(q1 − q2) = u
q1, q2 are angular positions, u is the torque input, and thephysical parameters g, I, J , k, L, and M are all positivey = q1 satisfies the 4th-order differential equation
y(4) = gLM
I(y2 sin y−y cos y)−
(k
I+ k
J
)y−gkLM
IJsin y+ k
IJu
θ1 = gLM
I, θ2 =
(k
I+ k
J
), θ3 = gkLM
IJ, θ4 = k
IJ
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 8/61

State Feedback Controller
e1 = y − yr = x1 − yr
e2 = y − yr = x2 − yr...
en = y(n−1) − y(n−1)r = xn − y
(n−1)r
e = Ae+ bf0(e+ Yr, z) + θT f(e+ Yr, z)+ (g0 + θT g)v − y
(n)r
z = A2z + b2v
(A, b) and (A2, b2) are controllable canonical pairs thatrepresent chains of n and m integrators, respectively
Choose a matrix K such that Am = A− bK is Hurwitz
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 9/61

e = Ame+ bKe+ f0(e+ Yr, z) + θT f(e+ Yr, z)+ (g0 + θT g)v − y
(n)r
PAm +ATmP = −Q, Q = QT > 0
V = eTPe+ 12θTΓ−1θ, Γ = ΓT > 0, θ = θ − θ
V = −eTQe+ 2eTPb[f0 + θT f + (g0 + θT g)v
+Ke− y(n)r ] + θTΓ−1 ˙
θ
v =−Ke+ y
(n)r − f0(e+ Yr, z) − θT f(e+ Yr, z)
g0 + θT g︸ ︷︷ ︸
ψ(e,z,YR ,θ)
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 10/61

2eTPb[f(e+ Yr, z) + gψ(e, z,YR, θ)] = φ(e, z,YR, θ)
V = −eTQe+ θTΓ−1[˙θ − Γφ]
˙θ = Γφ ⇒ V = −eTQe
With parameter projection, we can achieve
θTΓ−1[ ˙θ − Γφ] ≤ 0 ⇒ V ≤ −eTQe
while keeping θ(t) ∈ Ω for all t ≥ 0
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 11/61

Example of Parameter Projection:
Ω = θ | ai ≤ θi ≤ bi, 1 ≤ i ≤ p
Ωδ = θ | ai − δ ≤ θi ≤ bi + δ, 1 ≤ i ≤ p ⊂ Ω
Let Γ be a positive diagonal matrix. The adaptive law
˙θ = Proj(θ, φ)
where Proj(θ, φ) is defined on the next page, is locallyLipschitz in (θ, φ) and ensures
θ(0) ∈ Ω ⇒ θ(t) ∈ Ωδ, ∀ t ≥ 0
θTΓ−1[˙θ − Γφ] ≤ 0
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 12/61

[Proj(θ, φ)]i is defined by
γiiφi, if ai ≤ θi ≤ bi or
if θi > bi and φi ≤ 0 or
if θi < ai and φi ≥ 0
γii
[
1 + bi−θi
δ
]
φi, if θi > bi and φi > 0
γii
[
1 + θi−ai
δ
]
φi, if θi < ai and φi < 0
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 13/61

V ≤ −eTQe ⇒ V is bounded ⇒ (e, θ) are bounded
⇒ (x, z, θ) are bounded
Boundedness of θ follows also from θ ∈ Ωδ. With allsignals bounded, we conclude from V ≤ −eTQe that
e(t) → 0 as t → ∞
In preparation for output feedback, we saturate ψ and φoutside the compact set of interest. Let E0 and Z0 becompact sets such that e(0) ∈ E0, and z(0) ∈ Z0
c1 = maxe∈E0
eTPe, and c2 = maxθ∈Ω,θ∈Ωδ
12(θ− θ)TΓ−1(θ− θ)
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 14/61

c3 > c1 + c2 ⇒ e(t) ∈ Edef= eTPe ≤ c3, ∀ t ≥ 0
Find a compact set Z such that
z(0) ∈ Z0 and e(t) ∈ E ∀ t ≥ 0 ⇒ z(t) ∈ Z ∀ t ≥ 0
S ≥ max |ψ(e, z,YR, θ)|, Si ≥ max |φi(e, z,YR, θ)|where the maximization is taken over all
e ∈ E1def= eTPe ≤ c4, c4 > c3
z ∈ Z, YR ∈ YR, θ ∈ Ωδ
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 15/61

ψs(e, z,YR, θ) = S sat
(
ψ(e, z,YR, θ)S
)
φsi (e, z,YR, θ) = Si sat
(
φi(e, z,YR, θ)Si
)
, 1 ≤ i ≤ p
Replace ψ and ψ is the control and adaptive law by ψs andφs. For all e(0) ∈ E0, z(0) ∈ Z0, and θ(0) ∈ Ω, we have|ψ| ≤ S and |φi| ≤ Si for all t ≥ 0. Hence the saturationfunctions will not be effective and the state feedbackadaptive controller with ψ and φ replaced by ψs and φs willresult in the same performance
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 16/61

Parameter Convergence Under State Feedback
Recall
ζi = zi − xn−m+i
g0 + θT g, 1 ≤ i ≤ m
ζi = ζi+1, 1 ≤ i ≤ m− 1
ζm = − f0(x,z)+θT f(x,z)
g0+θT g
∣∣∣zi=ζi+xn−m+i/(g0+θT g)
Set x(t) = Yr(t) in the above equations and let ζ(t) be thesolution of the differential equation when z(0) = 0. Definez by
zi(t) = ζi(t) +y
(n−m+i−1)r (t)
g0 + θT g, 1 ≤ i ≤ m
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 17/61

Assumption: For any bounded x(t) such that x(t) → Yr(t)as t → ∞ and any z(0) ∈ Z0, ζ(t) → ζ(t) as t → ∞(consequently, z(t) → z(t) as t → ∞)
It is satisfied in the special case when
ζ = A0ζ + F0(x)
with a Hurwitz matrix A0 and a continuous function F0
Define wr(t) by
wr(t) = f(Yr(t), z(t)) + 1g0+θT g
g[
y(n)r (t) − f0(Yr(t), z(t)) − θT f(Yr(t), z(t))
]
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 18/61

Assumption: y(n+1)r (t) is bounded and wr(t) is persistently
exciting (PE)
The closed-loop system can be written as
e = Ame− bθTw(t)˙θ = 2Γ(t)w(t)bTPe
z = A2z + b2ψ
where w = f + gψ and Γ(t) is a bounded
bounded y(n+1)r (t) ⇒ bounded e ⇒ lim
t→∞e(t) = 0
⇒ w(t) → wr(t) as t → ∞ ⇒ w(t) is PE
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 19/61

Using the PE property of w and the fact that the derivativeof V = eTPe+ 1
2 θTΓθ satisfies V ≤ 0, it can be shown
(by a standard argument in adaptive control) that the originof the system
e
˙θ
=
Am −bwT (t)
2Γ(t)w(t)bTP 0
e
θ
is exponentially stable. Hence
θ(t) → θ as t → ∞
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 20/61

Output Feedback Control
Replace e by e, provided by the high-gain observer:
˙ei = ei+1 + (αi/εi)(e1 − e1), 1 ≤ i ≤ n− 1
˙en = (αn/εn)(e1 − e1)
The roots of
sn + α1sn−1 + · · · + αn−1s+ αn = 0
have negative real parts
ηi =ei − ei
εn−i , 1 ≤ i ≤ n
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 21/61

After finite timeV ≤ −eTQe+ kε
V ≤ −c0eTPe+ kε = −c0V + 12c0θ
TΓ−1θ + εk
θ ∈ Ωδ ⇒ 1
2θTΓ−1θ ≤ c2 ⇒ V ≤ −c0V + c0c2 + εk
On the boundary V = c3, V < 0 wheneverc3 > c2 + εk/c0. Since c3 > c1 + c2, we conclude that, forsufficiently small ε, the set V ≤ c3 ∩ θ ∈ Ωδ ispositively invariant. For sufficiently small ε,
All variables are bounded
The saturation components of ψs and φs will not beeffective for t ≥ T1
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 22/61

V ≤ −eTQe+ kε ⇒ limT →∞
1
T
∫ T
0eT (t)Qe(t) dt ≤ kε
The mean-square tracking error is of order O(ε)
Sharper Result Under PE Condition:
Singular Perturbation Result:
x = F (t, x, z) +H1(t, x, z, y, ε)
z = G(t, x, z) +H2(t, x, z, y, ε)
εy = Ay + εH3(t, x, z, y, ε)
where A is Hurwitz and H1,H2 vanish at y = 0.
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 23/61

Suppose the solutions of
x = F (t, x, z)
z = G(t, x, z)
are bounded and satisfy
‖x(t)‖ ≤ ke−γ(t−t0)‖x0‖, ∀ t ≥ t0
Then, for sufficiently small ε,∥∥∥∥∥
[
x(t)
y(t)
]∥∥∥∥∥
≤ k1e−γ1(t−t0)
∥∥∥∥∥
[
x(t0)
y(t0)
]∥∥∥∥∥, ∀ t ≥ t0
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 24/61

Under the PE Condition we have
∥∥∥∥∥∥∥
e(t)
θ(t)
η(t)
∥∥∥∥∥∥∥
≤ k1e−γ1(t−t1)
∥∥∥∥∥∥∥
e(t1)
θ(t1)
η(t1)
∥∥∥∥∥∥∥
, ∀ t ≥ t1
for some k1 > 0, γ1 > 0, and any t1 > T1
limt→∞[z(t) − z(t)] = 0
The trajectories (e(t), z(t), θ(t)) under output feedbackapproach the corresponding trajectories under statefeedback as ε → 0
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 25/61

Example
G(s) =c
s(s+ a)
where a and c are unknown, but −1.9 ≤ a ≤ 1.9 and1.1 ≤ c ≤ 2.9. The vector θ = [a c]T belongs to acompact convex hypercube Ω, and we take δ = 0.1.Design an adaptive output controller such that the output yasymptotically tracks a reference signal yr, which is theoutput of the reference model
Gm(s) =ω2
s2 + 2ζωs+ ω2
driven by a command signal r
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 26/61

The system and reference model can be represented by thedifferential equations
y = −ay + cu, (v = u)
yr = −2ζωyr − ω2yr + ω2r
We assume that r and r are bounded, so that yr, yr, yr,
and y(3)r are bounded. The PE condition requires
wr =
[
−yr(yr + ayr)/c
]
to be persistently exciting for all −1.9 ≤ a ≤ 1.9 and1.1 ≤ c ≤ 2.9
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 27/61

This is the case if and only if[
yr
yr
]
is PE , which is true if r(t) is a stationary signal that issufficiently rich of order 2
K = [ω2 2ζω] ⇒ Am =
[
0 1
−ω2 −2ζω
]
P = α
[
2ω(1 + ζ) 1
1 2/ω
]
, α > 0
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 28/61

Γ = γI, γ > 0
u = ψ =1
c[−Ke+ yr + a(e2 + yr)]
φ =
[
φ1
φ2
]
=
[
−2α(e1 + 2e2/ω)(e2 + yr)
2α(e1 + 2e2/ω)ψ
]
where a and c are the parameter estimates. To proceedwith the design we need to calculate the saturation levelsfor ψ, φ1, and φ2
ζ = 0.7, ω = 1, α = 0.5, γ = 10
e(0) ∈ E0 = e | |e1| ≤ 1 and |e2| ≤ 1
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 29/61

c1 = maxe∈E0
eTPe ≤ 7.4α
c2 = maxθ∈Ω,θ∈Ω
‖θ − θ‖2/2γ ≤ 10/γ
c4 = 4.8, e ∈ E1 = eTPe ≤ c4By calculating upper bounds on |ψ|, |φ1|, |φ2| for e ∈ E1,θ ∈ Ωδ, |yr(t)| ≤ 1.5, and |yr(t)| ≤ 1.5, we choose thesaturation levels of ψ, φ1, and φ2 as S = 10.1, S1 = 10,and S2 = 32.2, respectively
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 30/61

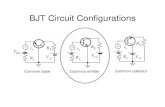
Simulation: a = 1, c = 2 (known), ǫ = 0.01, zero initialconditions
0 5 10 15 20 25 30 35 40 45 50−2
−1
0
1
2(a
) y
y_r
0 5 10 15 20 25 30 35 40 45 50−1
−0.5
0
0.5
1
Time
(b)
u
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 31/61

Simulation: a = 1, c = 2 (known), ǫ = 0.01 zero initialconditions
0 2 4 6 8 10 12 14 16 18 20−0.15
−0.1
−0.05
0
0.05(a
)
e=y−y_r
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
Time
(b)
Estimate of a
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 32/61

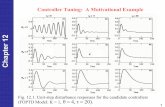
Simulation: a = −1, c = 2 (unknown), ǫ = 0.01, zero initialconditions except y(0) = 1 and θ2(0) = 1.1
0 5 10 15 20 25 30 35 40 45 50−2
−1
0
1
2(a
)
y
y_r
0 5 10 15 20 25 30 35 40 45 50−2
−1
0
1
2
Time
(b)
u
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 33/61

Simulation: a = −1, c = 2 (unknown), ǫ = 0.01, zero initialconditions except y(0) = 1 and θ2(0) = 1.1
0 5 10 15 20 25 30 35 40 45 50−0.5
0
0.5
1(a
)
e=y−y_r
0 5 10 15 20 25 30 35 40 45 50−2
−1
0
1
2
3
Time
(b)
Estimate of a
Estimate of c
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 34/61

Simulation: a = −1, c = 2 (unknown), ǫ = 0.01, zero initialconditions except y(0) = 1 and θ2(0) = 1.1
0 0.05 0.1 0.15 0.2 0.25 0.3−20
−10
0
10
20(a
)
u
0 0.05 0.1 0.15 0.2 0.25 0.3−20
0
20
40
60
Time
(b)
e_2
Estimate of e_2
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 35/61

Example:
ξ1 = ξ2 + θξ21ξ2 = u+ ξ3
ξ3 = −ξ3 + y
y = ξ1
y(3) = (u+ y − y) + 2θ(yy + y2 + yy) + u
The system satisfies all the assumptions. Add an integratorat the input, take z = u, and set v = u as the control input.The PE condition requires y(4)(t) to be bounded and
wr(t) = 2[yr(t)yr(t) + y2r(t) + yr(t)yr(t)]
to be persistently exciting.
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 36/61

e1 = y − yr, e2 = y − yr, e3 = y − yr
K = [2 4 3] assigns the eigenvalues of Am at −1 and−1 ± j. The matrix P satisfies PAm +ATmP = −I
ψ = −Ke− u− y + y − 2θ(yy + y2 + yy) + y(3)r
φ = 4(eTPb)(yy + y2 + yy)
θ ∈ Ω = θ | 0 ≤ θ ≤ 2Take δ = 0.1, γ = 10
maxθ∈Ω,θ∈Ωδ
1
2γ(θ − θ)2 = 0.2205
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 37/61

Take c4 = 2.4 which allows for c1 = 2
e(0) ∈ E0 = eTPe ≤ 2
e ∈ E1 = eTPe ≤ 2.4Using the zero dynamics equation
ζ = −ζ − [y + 2θ(yy + y2 + yy)]
where ζ = z − y. Taking z(0) = 0 and assuming that themagnitudes of yr and its first two derivatives are boundedby 0.1, it can be shown that for all e ∈ E1, |z| is bounded by33
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 38/61

By calculating upper bounds on ψ and φ for all e ∈ E1,|z| ≤ 33 and θ ∈ Ωδ, the saturation levels S = 75 andS1 = 25 are chosen for ψ and φ, respectively. Theestimates ei are provided by the high-gain observer
ǫ ˙e1 = e2 + (2/ε)(e1 − e1)
ǫ ˙e2 = e3 + (4/ε2)(e1 − e1)
ǫ ˙e3 = (3/ε3)(e1 − e1)
The output feedback controller is obtained by replacing ei inψ and φ by ei and taking v = ψs, u =
∫v
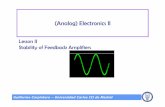
Simulation: θ = 1, yr = 0.1 sin t, ǫ = 0.01, zero initialconditions for all variables except y(0) = 1. In one graphresults are shown for y(0) = 1 and y(0) = 0.45
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 39/61

0 2 4 6 8 10 12 14−0.5
0
0.5
1
1.5
2
(a)
Tracking error
0 2 4 6 8 10 12 14−8
−6
−4
−2
0
2
Time
(b) u
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 40/61

0 0.05 0.1 0.15 0.2 0.25 0.3−100
−50
0
50
100
(a)
v
0 2 4 6 8 10 12 14−20
−10
0
10
20
Time
(b)
v
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 41/61

0 2 4 6 8 10 12 14−0.5
0
0.5
1
1.5
2
(a)
0 2 4 6 8 10 12 14−8
−6
−4
−2
0
2
Time
(b)
State (solid); Output (dashed); (a) Output; (b) Control u
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 42/61

Extensions (Aloliwi and Khalil (1997))
In traditional adaptive control results, PE is required to showparameter convergence, but not to show tracking errorconvergence, as required in the output feedback controller
Assumption: wr satisfies one of the following:
wr is PE
wr = 0
There is a constant nonsingular matrix L, possiblydependent on θ, such that
Lwr(t) =
[
wr1(t)
0
]
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 43/61

θTL−1 = [θT1 , θT2 ]
e = Ame− bθTw + Λ(·)= Ame− bθTL−1Lwr + bθT (wr − w) + Λ(·)= Ame− bθT1wr1 + +bθT (wr − w) + Λ(·)
[
e˙θ1
]
=
[
Am −bGwTr12Γ1Gwr1bTP 0
] [
e
θ1
]
+
[
Λs
Λe
]
k1 ≤ G ≤ k2, ‖Λe‖ ≤ k3‖e‖
‖Λs‖ ≤ k4‖e‖ + k5‖ζ‖ + k6‖η‖, ζ = ζ − ζ
The linear part is exponentially stable
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 44/61

Assumption: The zero dynamics are exponentially stable
W = αV + βV1 + V2 + Vη, α > 0, β > 0
V = eTPe+ 12θTΓ−1θ, V1 is a Lyapunov function for the
zero dynamics in terms of ζ, V2 is a Lypaunov function forthe exponentially stable dynamics in terms of (e, θ1), andVη is a Lyapunov function for the observer dynamics interms of η
W ≤ −
‖e‖‖θ1‖‖ζ‖‖η‖
T
M
‖e‖‖θ1‖‖ζ‖‖η‖
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 45/61

With a particular choice of α and β, it can be shown that Mis positive definite for sufficiently small ε
‖e(t)‖‖θ1(t)‖‖ζ(t)‖‖η(t)‖
→ 0 as t → ∞
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 46/61

Bounded Disturbance:
V ≤ −eTQe+ k1ε+ k2d1
where d1 is a bound on the disturbance. Themean-square tracking error if of the order O(ε+ d1)
If wr is PEW ≤ −k1W + k2d1
All variables, including θ, converge to a ball centered at theorigin, whose size is of the order of O(
√d1).
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 47/61

Adaptive Approximation-Based (Neural Network) Control
Farrell and Polycarpou (2006)
Control Architecture
Function Approximator
Training Algorithm
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 48/61

Control Architecture
xi = xi+1, 1 ≤ i ≤ n− 1
xn = [f0(x) + f(x)] + [g0(x) + g(x)]u
[g0(x) + g(x)] 6= 0
f0 and g0 are known while f and g are unknown
Feedback Linearization:
u =1
g0(x) + g(x)[−f0(x) − f(x) + v]
f and g are approximations of f and g
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 49/61

Function Approximator
f(x) =N∑
i
θiφi(x, σ) = θTφ(x, σ), ∀ x ∈ D
Approximation Structures:
Polynomials
Splines
Radial Basis Functions
Multilayer Perceptron
Fuzzy Approximation
wavelets
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 50/61

Universal Approximation:
In a given compact subset of the domain D, theapproximation error
∆f (x) = f(x) −N∑
i
θiφi(x, σ)
can be made arbitrarily small by choosing N sufficientlylarge
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 51/61

Learning Algorithm
Fix σ in f(x) = θTφ(x, σ)
f(x) = θTφ(x)
On-line Approximator: f(x) = θTφ(x)
Lyapunov-Based Adaptive Laws
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 52/61

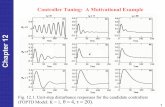
Seshagiri and Khalil (2000)
y(n) = F (·) +G(·)u(m), G(·) ≥ k1 > 0, m < n
F (·) = F (y, y(1), . . . , y(n−1), u, u(1), . . . , u(m−1))
Dynamic Extension:
- - -· · · - - -
∫ ∫ ∫
Plantv = u(m) u(m−1) u(1) u y
State Variables:
x1 = y, x2 = y(1), . . . , xn = y(n−1)
z1 = u, z2 = u(1), . . . , zm = u(m−1)
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 53/61

Extended State Model:
xi = xi+1, 1 ≤ i ≤ n− 1
xn = F (x, z) +G(x, z)v
zi = zi+1, 1 ≤ i ≤ m− 1
zm = v
y = x1
Dimension = n+m, Relative Degree = n
Normal Form:xi = xi+1, 1 ≤ i ≤ n− 1
xn = F (x, z) +G(x, z)v
ζ = f0(ζ, x) ISS
y = x1
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 54/61

For all (x, z) ∈ X × Z (compact)
F (x, z) = θTf φf (x, z) + δf (x, z), F (x, z) = θTf φf (x, z)
G(x, z) = θTg φg(x, z) + δg(x, z), G(x, z) = θTg φg(x, z)
θ =
[
θfθg
]
, θ =
[
θfθg
]
, ψ =
[
φfφgv
]
θ = θ − θ, δ = δf + δgv, |δf | ≤ λ, |δg| ≤ λ (small)
θ ∈ Θ (compact), θ ∈ Θ (compact), Θ ⊂ Θ
Assumption: ∀ (x, z, θ) ∈ X × Z × Θ, G ≥ k0 > λ > 0
F +Gv = F + Gv − θTψ + δ
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 55/61

Tracking: limt→∞[y(t) − yr(t)] = 0 (bounded
yr, . . . , y(n)r )
ei = xi − y(i−1)r , 1 ≤ i ≤ n
e = Ae+B[F + Gv − y(n)r − θTψ + δ]
v =−Ke+ y
(n)r − F + v1
G
e = (A−BK)︸ ︷︷ ︸
Hurwitz
e+B(−θTψ + v1 + δ)
P (A−BK) + (A−BK)TP = −Q, Q = QT > 0
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 56/61

V = eTPe+1
2γθT θ
V = −eTQe+1
γθ( ˙θ − γψ) + 2eTPB(v1 + δ)
˙θ = γψ with parameter projection s.t. θ ∈ Θ
|δ| ≤ |δf | + |δg| |v| ≤ λρ(·)︸ ︷︷ ︸
known
+ (λ/k0)︸ ︷︷ ︸
(< 1, known)
|v1|
v1 = − λρ
1 − (λ/k0)sat
(
eTPBρ
2µ
)
, µ > 0
V ≤ −eTQe+λµ
1 − (λ/k0)
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 57/61

Determine the approximation set X × Z. Let e(0) ∈ E0
Choose c0 > 0 such that E0 ⊂ eTPe ≤ c0
Choose c > c0 (all forthcoming sets will depend on c)
V = eTPe+1
2γθT θ ≤ c ⇒ eTPe ≤ c ⇒ x ∈ X (compact)
ISS of ζ = f0(ζ, x) ⇒
∂V1(ζ)
∂ζf0(ζ, x) ≤ −α1(‖ζ‖), ∀ ‖ζ‖ ≥ α2(‖x‖)
x ∈ X ⇒ ζ ∈ V1(ζ) ≤ c1 ⇒ z ∈ Z (compact)
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 58/61

For all θ ∈ Θ,1
2θT θ ≤ c2
V ≤ −keTPe+λµ
1 − (λ/k0)≤ −kV +
kc2
γ+
λµ
1 − (λ/k0)
Choose µ (small enough) and γ (large enough) such that
c >c2
γ+
λµ
k(1 − (λ/k0))
Ωdef= V1(ζ) ≤ c1 × V (e, θ) ≤ c × θ ∈ Θ
is compact and positively invariant
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 59/61

Desired ultimate bound: ‖e(t)‖ ≤ b
eTPe ≤ λmin(P )b2 ⇒ ‖e‖ ≤ b
Choose µ (small enough) and γ (large enough) such that
λmin(P )b2 >c2
γ+
λµ
k(1 − (λ/k0))
A def= V1(ζ) ≤ c1 × V (e, θ) ≤ λmin(P )b2 × θ ∈ Θ
is compact, positively invariant, and all trajectories startingin Ω enter A in finite time
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 60/61

Saturate e outside the compact set eTPe ≤ c
High-Gain Observer:
˙ei = ei+1 + (αi/εi)(e1 − e1), 1 ≤ i ≤ n− 1
˙en = (αn/εn)(e1 − e1)
sn + α1sn−1 + · · · + αn is Hurwitz
Replace e by e
The output feedback controller recovers the performance ofthe state feedback controller as ε tends to zero
High-Gain ObserversinNonlinear Feedback ControlLecture # 4Adaptive Control – p. 61/61