Lecture 11: Model-Reference Adaptive Systems - umu. · PDF fileLecture 11: Model-Reference...
62
Lecture 11: Model-Reference Adaptive Systems Given: y (t)= G θ (p) u(t), y m (t)= G m (p) u c (t), Find: u(t)= − S ˆ θ (p) R ˆ θ (p) y (t)+ T ˆ θ (p) R ˆ θ (p) u c (t), d dt ˆ θ = ... c Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 1/22
Transcript of Lecture 11: Model-Reference Adaptive Systems - umu. · PDF fileLecture 11: Model-Reference...

Lecture 11: Model-Reference Adaptive Systems
Given: y(t) = Gθ(p)u(t), ym(t) = Gm(p)uc(t),
Find: u(t) = −Sθ̂(p)
Rθ̂(p)
y(t) +Tθ̂(p)
Rθ̂(p)
uc(t),d
dtθ̂ = . . .
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 1/22

MIT rule (Example 5.1)
Consider a stable single input single output (SISO) system
y(t) = k · G(p)(
u(t))
where• y(t) is the system output,
• G(s) is a known stable transfer function,
• u(t) is a control input,• k is a constant unknown gain.
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 2/22

MIT rule (Example 5.1)
Consider a stable single input single output (SISO) system
y(t) = k · G(p)(
u(t))
where• y(t) is the system output,
• G(s) is a known stable transfer function,
• u(t) is a control input,• k is a constant unknown gain.
The problem is find a controller u(t) = T (p)R(p)
uc(t) to follow
ym(t) = Gm(p)(
uc(t))
= k0 · G(p)(
uc(t))
,
where k0 is a given constant gain.
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 2/22

MIT rule (Example 5.1)
If k were known we can solve the problem
y(t) = k · G(p)(
u(t))
−→ ym(t) = k0 · G(p)(
uc(t))
using the simple proportional controller
u(t) = θ · uc(t)
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 3/22

MIT rule (Example 5.1)
If k were known we can solve the problem
y(t) = k · G(p)(
u(t))
−→ ym(t) = k0 · G(p)(
uc(t))
using the simple proportional controller
u(t) = θ · uc(t)
This is, indeed, works, because if θ is chosen as
θ =k0
k
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 3/22

MIT rule (Example 5.1)
If k were known we can solve the problem
y(t) = k · G(p)(
u(t))
−→ ym(t) = k0 · G(p)(
uc(t))
using the simple proportional controller
u(t) = θ · uc(t)
This is, indeed, works, because if θ is chosen as
θ =k0
k
then
y(t) = k · G(p)(
θ · uc(t))
= k · G(p)
(k0
k· uc(t)
)
= ym(t)
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 3/22

MIT rule (Example 5.1)
Question: How to update (adapt) the value of θ?
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 4/22

MIT rule (Example 5.1)
Question: How to update (adapt) the value of θ?
Let us consider the error between the real and simulated outputs
e(t, θ) = y(t)−ym(t) = k·G(p)(
θ(t) · uc(t))
−k0·G(p)(
uc(t))
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 4/22

MIT rule (Example 5.1)
Question: How to update (adapt) the value of θ?
Let us consider the error between the real and simulated outputs
e(t, θ) = y(t)−ym(t) = k·G(p)(
θ(t) · uc(t))
−k0·G(p)(
uc(t))
Let us update θ(t) so that e(t, θ) is getting smaller.
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 4/22

MIT rule (Example 5.1)
Question: How to update (adapt) the value of θ?
Let us consider the error between the real and simulated outputs
e(t, θ) = y(t)−ym(t) = k·G(p)(
θ(t) · uc(t))
−k0·G(p)(
uc(t))
Let us update θ(t) so that e(t, θ) is getting smaller.
Consider the loss function that measures the size of e(t, θ)
J (t, θ) = |e(t, θ)|2
Its time derivative is given by (chain rule)
d
dtJ =
[∂
∂tJ
]
+
[∂
∂θJ
]
·d
dtθ
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 4/22

MIT rule (Example 5.1)
Question: How to update (adapt) the value of θ?
Let us consider the error between the real and simulated outputs
e(t, θ) = y(t)−ym(t) = k·G(p)(
θ(t) · uc(t))
−k0·G(p)(
uc(t))
Let us update θ(t) so that e(t, θ) is getting smaller.
Consider the function that measures the size of e(t, θ)
J (t, θ) = |e(t, θ)|2
Its time derivative should be made negative:
d
dtJ = · · · +
[∂
∂θJ
]
·d
dtθ ⇒
d
dtθ = −γ ·
[∂
∂θJ
]
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 4/22

MIT rule (Example 5.1)
Question: How to update (adapt) the value of θ?
Let us consider the error between the real and simulated outputs
e(t, θ) = y(t)−ym(t) = k·G(p)(
θ(t) · uc(t))
−k0·G(p)(
uc(t))
Let us update θ(t) so that e(t, θ) is getting smaller.
Consider the function that measures the size of e(t, θ)
J (t, θ) = |e(t, θ)|2
Its time derivative should be made negative:
d
dtJ = · · · +
[
2 e∂
∂θe
]
·d
dtθ ⇒
d
dtθ = −γ ·
[
2 e∂
∂θe
]
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 4/22

MIT rule (Example 5.1)
Computing the partial derivative of e wrt θ we have
∂
∂θe =
∂
∂θ
[
k · G(p)(
θ(t) · uc(t))]
= k · G(p)(
uc(t))
=k
k0· k0 · G(p)
(
uc(t))
=k
k0ym(t)
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 5/22

MIT rule (Example 5.1)
Computing the partial derivative of e wrt θ we have
∂
∂θe =
∂
∂θ
[
k · G(p)(
θ(t) · uc(t))]
= k · G(p)(
uc(t))
=k
k0· k0 · G(p)
(
uc(t))
=k
k0ym(t)
Then the update law for θ becomes
d
dtθ = −γ ·
[
2 e∂
∂θe
]
= −γn · ym(t) · e(t, θ)
where γn > 0 is arbitrary since γn = γk
k0with arbitrary γ > 0.
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 5/22

MIT rule (Example 5.1)
Computing the partial derivative of e wrt θ we have
∂
∂θe =
∂
∂θ
[
k · G(p)(
θ(t) · uc(t))]
= k · G(p)(
uc(t))
=k
k0· k0 · G(p)
(
uc(t))
=k
k0ym(t)
Then the update law for θ becomes
d
dtθ = −γ ·
[
2 e∂
∂θe
]
= −γn · ym(t) · e(t, θ)
where γn > 0 is arbitrary since γn = γk
k0with arbitrary γ > 0.
Remark: J (·) = |e(·)| ⇒ ddtθ = −γn · ym(t) · sign[e(t, θ)].
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 5/22

MIT rule (Example 5.1)
Suppose that
G(s) =1
s + 1
andk = 1, k0 = 2
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 6/22

MIT rule (Example 5.1)
Suppose that
G(s) =1
s + 1
andk = 1, k0 = 2
The update law for θ
d
dtθ = −γ ·
[
2 e∂
∂θe
]
= −γn · ym(t) · e(t)
is simulated for various values of
γ = 0.5, 2.5, 4.5
with uc(t) = sin t.
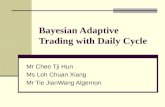
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 6/22

0 5 10 15 20 250
0.5
1
1.5
2
2.5
3
3.5
time (sec)
θ
The behavior of θ for various values of γ.
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 7/22

0 5 10 15 20 25−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
time (sec)
Out
put,
y
The behavior of y(t) for various values of γ.
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 8/22

MIT rule (Example 5.2)
Suppose that the system dynamics are
d
dty = −a y + b u, y =
b
p + au
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 9/22

MIT rule (Example 5.2)
Suppose that the system dynamics are
d
dty = −a y + b u, y =
b
p + au
While the desired dynamics for the closed loop system is
d
dtym = −am ym + bm uc, ym =
bm
p + am
uc
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 9/22

MIT rule (Example 5.2)
Suppose that the system dynamics are
d
dty = −a y + b u, y =
b
p + au
While the desired dynamics for the closed loop system is
d
dtym = −am ym + bm uc, ym =
bm
p + am
uc
The proportional controller that solves the problem is given by
u(t) =T (p)
R(p)uc(t) −
S(p)
R(p)y(t) = θ1 uc(t) − θ2 y(t)
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 9/22

MIT rule (Example 5.2)
Suppose that the system dynamics are
d
dty = −a y + b u, y =
b
p + au
While the desired dynamics for the closed loop system is
d
dtym = −am ym + bm uc, ym =
bm
p + am
uc
The proportional controller that solves the problem is given by
u(t) = θ1 uc(t) − θ2 y(t)
where the gains to ensure the desired system response are
θ1 = θ01 =
bm
b, θ2 = θ0
2 =am − a
b
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 9/22

MIT rule (Example 5.2)
Introduce the error signal
e(t) = y(t) − ym(t) =b θ1
p + a + b θ2uc(t) −
bm
p + am
uc
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 10/22

MIT rule (Example 5.2)
Introduce the error signal
e(t) = y(t) − ym(t) =b θ1
p + a + b θ2uc(t) −
bm
p + am
uc
Computing partial derivatives of e(·) w.r.t. θ1, θ2, we have
∂e
∂θ1=
b
p + a + b θ2uc(t)
∂e
∂θ2= −
b θ1 · b
(p + a + b θ2)2uc(t) =
−b
p + a + b θ2y(t)
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 10/22

MIT rule (Example 5.2)
Introduce the error signal
e(t) = y(t) − ym(t) =b θ1
p + a + b θ2uc(t) −
bm
p + am
uc
Computing partial derivatives of e(·) w.r.t. θ1, θ2, we have
∂e
∂θ1=
b
p + a + b θ2uc(t)
∂e
∂θ2= −
b θ1 · b
(p + a + b θ2)2uc(t) =
−b
p + a + b θ2y(t)
Such formulas cannot be used for updating θ1 and θ2 values.
Indeed, constants a and b are not known!
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 10/22

MIT rule (Example 5.2)
Introduce the error signal
e(t) = y(t) − ym(t) =b θ1
p + a + b θ2uc(t) −
bm
p + am
uc
Computing partial derivatives of e(·) w.r.t. θ1, θ2, we have
∂e
∂θ1=
b
p + a + b θ2uc(t)
∂e
∂θ2= −
b θ1 · b
(p + a + b θ2)2uc(t) =
−b
p + a + b θ2y(t)
Not much can be done, we will assume that we can initialize θ2around its nominal value
θ2 ≈ θ02 =
am − a
b
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 10/22

MIT rule (Example 5.2)
Introduce the error signal
e(t) = y(t) − ym(t) =b θ1
p + a + b θ2uc(t) −
bm
p + am
uc
Computing partial derivatives of e(·) w.r.t. θ1, θ2, we have
∂e
∂θ1=
b
p + a + b θ2uc(t)
∂e
∂θ2= −
b θ1 · b
(p + a + b θ2)2uc(t) =
−b
p + a + b θ2y(t)
Not much can be done, we will assume that we can initialize θ2around its nominal value
θ2 ≈ θ02 =
am − a
b⇒ (a + b θ2) ≈ am
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 10/22

MIT rule (Example 5.2)
This results in the following relations
d
dtθ1 = −γ · e(t) ·
∂e(t)
∂θ1≈ −γ · e(t) ·
(b
s + am
uc(t)
)
= −γn · e(t) ·
(am
s + am
uc(t)
)
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 11/22

MIT rule (Example 5.2)
This results in the following relations
d
dtθ1 ≈ −γn · e(t) ·
(am
s + am
uc(t)
)
d
dtθ2 = −γ · e(t) ·
∂e(t)
∂θ2≈ −γ · e(t) ·
(−b
s + am
y(t)
)
= γn · e(t) ·
(am
s + am
y(t)
)
where
γn = γb
am
and should be positive!
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 11/22

MIT rule (Example 5.2)
This results in the following relations
d
dtθ1 ≈ −γn · e(t) ·
(am
s + am
uc(t)
)
d
dtθ2 = −γ · e(t) ·
∂e(t)
∂θ2≈ −γ · e(t) ·
(−b
s + am
y(t)
)
= γn · e(t) ·
(am
s + am
y(t)
)
where
γn = γb
am
and should be positive!
To implement this algorithm we need to know the sign of b!
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 11/22

c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 12/22

c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 13/22

MIT rule (Example 5.3)
Consider the static system with unknown gain k
y(t) = k · u(t), G(s) ≡ 1
and the problem of amplifying uc(t) so that we match
ym(t) = k0 · uc(t)
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 14/22

MIT rule (Example 5.3)
Consider the static system with unknown gain k
y(t) = k · u(t), G(s) ≡ 1
and the problem of amplifying uc(t) so that we match
ym(t) = k0 · uc(t)
With u(t) = θ uc(t) introduce the error
e(t) = y(t)−ym(t) = k·(
θ uc(t))
−k0·uc(t) = k(θ − θ0
)uc(t)
with θ0 = k0/k.
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 14/22

MIT rule (Example 5.3)
Consider the static system with unknown gain k
y(t) = k · u(t), G(s) ≡ 1
and the problem of amplifying uc(t) so that we match
ym(t) = k0 · uc(t)
With u(t) = θ uc(t) introduce the error
e(t) = y(t)−ym(t) = k·(
θ uc(t))
−k0·uc(t) = k(θ − θ0
)uc(t)
with θ0 = k0/k.
d
dtθ(t) = −γ · e(t) ·
∂e(t)
∂θ= −γ ·k
(θ(t) − θ0
)uc(t) ·k uc(t)
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 14/22

MIT rule (Example 5.3)
Consider the static system with unknown gain k
y(t) = k · u(t), G(s) ≡ 1
and the problem of amplifying uc(t) so that we match
ym(t) = k0 · uc(t)
With u(t) = θ uc(t) introduce the error
e(t) = y(t)−ym(t) = k·(
θ uc(t))
−k0·uc(t) = k(θ − θ0
)uc(t)
with θ0 = k0/k.
d
dtθ(t) = −γ · k2 · (uc(t))
2 ·(θ(t) − θ0
)
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 14/22

MIT rule (Example 5.3)
Consider the static system with unknown gain k
y(t) = k · u(t), G(s) ≡ 1
and the problem of amplifying uc(t) so that we match
ym(t) = k0 · uc(t)
With u(t) = θ uc(t) introduce the error
e(t) = y(t)−ym(t) = k·(
θ uc(t))
−k0·uc(t) = k(θ − θ0
)uc(t)
with θ0 = k0/k.
d
dt
(θ(t) − θ0
)= −γn · k · (uc(t))
2 ·(θ(t) − θ0
)
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 14/22

MIT rule (Example 5.3)
Consider the static system with unknown gain k
y(t) = k · u(t), G(s) ≡ 1
and the problem of amplifying uc(t) so that we match
ym(t) = k0 · uc(t)
With u(t) = θ uc(t) introduce the error
e(t) = y(t)−ym(t) = k·(
θ uc(t))
−k0·uc(t) = k(θ − θ0
)uc(t)
with θ0 = k0/k.
(θ(t) − θ0
)= exp
{
−γn · k ·
∫ t
0(uc(t))
2 dτ
}
·(θ(0) − θ0
)
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 14/22

MIT rule (Example 5.3)
Consider the static system with unknown gain k
y(t) = k · u(t), G(s) ≡ 1
and the problem of amplifying uc(t) so that we match
ym(t) = k0 · uc(t)
With u(t) = θ uc(t) introduce the error
e(t) = y(t)−ym(t) = k·(
θ uc(t))
−k0·uc(t) = k(θ − θ0
)uc(t)
with θ0 = k0/k.
e(t) = k ·exp
{
−γn · k ·
∫ t
0(uc(t))
2 dτ
}
·(θ(0) − θ0
)
︸ ︷︷ ︸
θ(t)−θ0
·uc(t)
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 14/22

MIT rule (Example 5.3), cont’d
For the system and model given by
y(t) = k · u(t), ym(t) = k0 · uc(t)
we define e(t) = y(t) − ym(t) and take
u(t) = θ(t)uc(t),d
dtθ(t) = −γn ·k ·(uc(t))
2 ·(θ(t) − θ0
)
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 15/22

MIT rule (Example 5.3), cont’d
For the system and model given by
y(t) = k · u(t), ym(t) = k0 · uc(t)
we define e(t) = y(t) − ym(t) and take
u(t) = θ(t)uc(t),d
dtθ(t) = −γn · uc(t) · e(t)
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 15/22

MIT rule (Example 5.3), cont’d
For the system and model given by
y(t) = k · u(t), ym(t) = k0 · uc(t)
we define e(t) = y(t) − ym(t) and take
u(t) = θ(t)uc(t),d
dtθ(t) = −γn · uc(t) · e(t)
As the result we obtain
θ(t) = θ0 + σ(t), e(t) = k · σ(t) · uc(t)
σ(t) = exp{
−γn · k · It
}(
θ(0) − θ0)
, It =
∫ t
0(uc(t))
2 dτ
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 15/22

MIT rule (Example 5.3), cont’d
For the system and model given by
y(t) = k · u(t), ym(t) = k0 · uc(t)
we define e(t) = y(t) − ym(t) and take
u(t) = θ(t)uc(t),d
dtθ(t) = −γn · uc(t) · e(t)
As the result we obtain
θ(t) = θ0 + σ(t), e(t) = k · σ(t) · uc(t)
σ(t) = exp{
−γn · k · It
}(
θ(0) − θ0)
, It =
∫ t
0(uc(t))
2 dτ
If θ(0) 6= θ0, for e(t) → 0 as t → ∞ we need:
exp{
−γn · k · It
}
→ 0 or uc(t) → 0
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 15/22

MIT rule (Example 5.3), cont’d
For the system and model given by
y(t) = k · u(t), ym(t) = k0 · uc(t)
we define e(t) = y(t) − ym(t) and take
u(t) = θ(t)uc(t),d
dtθ(t) = −γn · uc(t) · e(t)
As the result we obtain
θ(t) = θ0 + σ(t), e(t) = k · σ(t) · uc(t)
σ(t) = exp{
−γn · k · It
}(
θ(0) − θ0)
, It =
∫ t
0(uc(t))
2 dτ
If θ(0) 6= θ0, for e(t) → 0 as t → ∞ we need:
It =
∫ t
0(uc(t))
2 dτ → ∞ or uc(t) → 0
.c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 15/22

Tuning the Gain for MIT rule
Consider again the problem with scaling the reference
y = k · G(p)u, ym = k0 · G(p)uc, u = θ uc
where θ(t) is determined by MIT rule:
d
dtθ = −γ · ym · e, e = y − ym
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 16/22

Tuning the Gain for MIT rule
Consider again the problem with scaling the reference
y = k · G(p)u, ym = k0 · G(p)uc, u = θ uc
where θ(t) is determined by MIT rule:
d
dtθ = −γ · ym · e, e = y − ym
The equation for θ can be re-written as follows
d
dtθ = −γ · ym ·
(
y − ym
)
= −γ · ym ·(
k · G(p) θ uc − ym
)
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 16/22

Tuning the Gain for MIT rule
Consider again the problem with scaling the reference
y = k · G(p)u, ym = k0 · G(p)uc, u = θ uc
where θ(t) is determined by MIT rule:
d
dtθ = −γ · ym · e, e = y − ym
The equation for θ can be re-written as follows
d
dtθ(t) + γ · k · ym(t) · G(p)
[
θ(t)uc(t)]
= γy2m(t)
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 16/22

Tuning the Gain for MIT rule
Consider again the problem with scaling the reference
y = k · G(p)u, ym = k0 · G(p)uc, u = θ uc
where θ(t) is determined by MIT rule:
d
dtθ = −γ · ym · e, e = y − ym
The equation for θ can be re-written as follows
d
dtθ(t) + γ · k · ym(t) · G(p)
[
θ(t)uc(t)]
= γy2m(t)
Here• the functions ym(t) and uc(t) are known!• the range of the constant gain γ, for which the nominal value
θ0 (its stationary point) is stable, should be determined.
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 16/22

Tuning the Gain for MIT rule (cont’d)
d
dtθ(t) + γ · k · ym(t) · G(p)
[
θ(t)uc(t)]
= γy2m(t)
In general the analysis of stability is difficult!
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 17/22

Tuning the Gain for MIT rule (cont’d)
d
dtθ(t) + γ · k · ym(t) · G(p)
[
θ(t)uc(t)]
= γy2m(t)
In general the analysis of stability is difficult!
Consider the case when ym(t) ≡ yom, uc(t) = uo
c , then ODE
d
dtθ(t) + γ · k · yo
m · u0c · G(p)
[
θ(t)]
= γ(yom)2
is linear and time-invariant!
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 17/22

Tuning the Gain for MIT rule (cont’d)
d
dtθ(t) + γ · k · ym(t) · G(p)
[
θ(t)uc(t)]
= γy2m(t)
In general the analysis of stability is difficult!
Consider the case when ym(t) ≡ yom, uc(t) = uo
c , then ODE
d
dtθ(t) + γ · k · yo
m · u0c · G(p)
[
θ(t)]
= γ(yom)2
is linear and time-invariant!
Stability is determined by the roots of the algebraic equation
s + µ · G(s) = 0, µ = γ · k · yom · u0
c
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 17/22

Tuning the Gain for MIT rule (cont’d)
d
dtθ(t) + γ · k · ym(t) · G(p)
[
θ(t)uc(t)]
= γy2m(t)
In general the analysis of stability is difficult!
Consider the case when ym(t) ≡ yom, uc(t) = uo
c , then ODE
d
dtθ(t) + γ · k · yo
m · u0c · G(p)
[
θ(t)]
= γ(yom)2
is linear and time-invariant!
Stability is determined by the roots of the algebraic equation
s + µ · G(s) = 0, µ = γ · k · yom · u0
c
Root locus analysis (variation of zeros with µ) can be used.A reasonable value for γ can be obtained from this analysis andmight work for slowly varying signals.
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 17/22

Example 5.4
Let, as in Example 5.1
G(s) =1
s + 1, k = 1, k0 = 2
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 18/22

Example 5.4
Let, as in Example 5.1
G(s) =1
s + 1, k = 1, k0 = 2
The characteristic equation
s + µ1
s + 1= 0 ⇔ s2 + s + µ = 0
has stable zeros if and only if
µ = γ · k · yom · u0
c = γ ·(
k0 G(0)u0c
)
· u0c = 2 γ (u0
c)2 > 0
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 18/22

Example 5.4
Let, as in Example 5.1
G(s) =1
s + 1, k = 1, k0 = 2
The characteristic equation
s + µ1
s + 1= 0 ⇔ s2 + s + µ = 0
has stable zeros if and only if
µ = γ · k · yom · u0
c = γ ·(
k0 G(0)u0c
)
· u0c = 2 γ (u0
c)2 > 0
So, γ > 0 will work.
Note, however, that the transient depends on u0c !
The relative damping is ζ = 12√
µ= 1
2√
2 γ |u0c |
.
µ ≈ 1 is reasonable ⇐ take γ ≈ 0.5 for u0c ≈ 1 in average.
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 18/22

Example 5.5
Consider the stable system with relative degree 2:
G(s) =1
s2 + a1 s + a2, a1 > 0, a2 > 0
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 19/22

Example 5.5
Consider the stable system with relative degree 2:
G(s) =1
s2 + a1 s + a2, a1 > 0, a2 > 0
The characteristic equation
s + µ1
s2 + a1 s + a2= 0 ⇔ s3 + a1 s
2 + a2 s + µ = 0
has stable zeros if and only if
µ > 0 and a1 a2 > µ = γ · k · yom · u0
c
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 19/22

Example 5.5
Consider the stable system with relative degree 2:
G(s) =1
s2 + a1 s + a2, a1 > 0, a2 > 0
The characteristic equation
s + µ1
s2 + a1 s + a2= 0 ⇔ s3 + a1 s
2 + a2 s + µ = 0
has stable zeros if and only if
µ > 0 and a1 a2 > µ = γ · k · yom · u0
c
Conclusion: with any choice of γ > 0, stability is lost forsufficiently large magnitudes of the reference signal u0
c !
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 19/22

c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 20/22

Normalized MIT rule
d
dtθ = −γ · e(t, θ) ·
φ
α + φT φ, φ =
∂
∂θe(t, θ), α > 0
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 21/22

Next Lecture / Assignments:
Next meeting (May 24, 13:00-15:00, in A208Tekn):Lyapunov-based design.
Homework problem: The process and model are described by
G(s) =1
s, Gm(s) =
2
s + 2
For the control law
u(t) = θ1 uc(t) − θ2 y(t)
design an MIT-like adaptation law such that
θi ≈ −
(
γ1 + γ21
p
) [
e∂
∂θie
]
, i ∈ {1, 2} .
Simulate the MRAS with various gains.
Consider γ1,2 ∈ {0, 1, 5} and a unit square wave for uc(t).Compare performance for different combinations.
c©Leonid Freidovich. May 14, 2010. Elements of Iterative Learning and Adaptive Control: Lecture 11 – p. 22/22