Multivariate polynomial interpolation: A GC -set in R … polynomial interpolation: A GC2-set in R4...
5
Click here to load reader
Transcript of Multivariate polynomial interpolation: A GC -set in R … polynomial interpolation: A GC2-set in R4...

Multivariate polynomial interpolation: A GC2-set in R4 without a maximal hyperplane
Carl de Boor
Abstract. A set T ⊂ Rd at which interpolation from Π≤n(Rd) (polynomials of degree ≤ n) is uniquely possible is a
GCn-set if the associated Lagrange fundamental polynomials have only linear factors. For such GCn-sets T in the
plane, Gasca and Maeztu conjectured the existence of a line containing n + 1 points from T. It is shown here that,
already in R4, there exist GC2-sets T without any hyperplanes containing dimΠ≤2(R3) points from T.
Introduction
This note is a follow-up on [B] inspired by Apozyan’s work [A1], for which a convenient reference is[A2]. It concerns interpolation to data at some set T in R
d from the set
Π≤n = Π≤n(Rd)
of polynomials of degree ≤ n in d variables. Call such a set T n-correct if the map
δT : p 7→ p T := (p(τ) : τ ∈ T),
when restricted to Π≤n, is 1-1 and onto RT, i.e., if there exists, for every a ∈ R
T, exactly one p ∈ Π≤n thatagrees with a on T, i.e., satisfies
p(τ) = a(τ), τ ∈ T.
If #T = dimΠ≤n(Rd), then the n-correctness of T follows already from δT Π≤n(Rd) being 1-1 or onto.
Among the n-correct sets, Chung and Yao [CY] have singled out what we now call GCn-sets. Theseare subsets T of R
d (or Cd) with the property that, for every τ ∈ T, there exist n hyperplanes whose unioncontains all the points of T except τ . It is easily seen that a GCn-set is n-correct.
In [GM], Gasca and Maetzu conjectured that every planar GCn-set has a maximal line, i.e., a straightline containing n+1 of the points of T. Such a line was called maximal in [B] since no line could contain morethan n + 1 points from an n-correct planar set. I will refer to this as the GMn-conjecture. The conjecturehas been verified only for n ≤ 5.
In [CG], Carnicer and Gasca showed that if the GMn conjecture is true for all n ≤ n0, then, for everyn ≤ n0, every planar GCn-set has three maximal lines. In an effort to understand better the GMn-conjecture,I proposed in [B] the following
CGn-conjecture. Every GCn-set in Rd has at least d + 1 maximal hyperplanes.
Here, a hyperplane H in Rd is called maximal for T if it contains the maximal number of points from
T possible when T is n-correct. This number equals dimΠ≤n(Rd−1) =(
d−1+nn
)
.
Further, I disproved this conjecture by exhibiting in [B] a GC2-set in R3 with only three maximal
hyperplanes. The idea behind the construction of that counterexample has been used very cleverly byApozyan in [A1] to construct a GC2-set in R
6 without any maximal hyperplanes, showing that the veryGM-conjecture fails to hold for d ≥ 6. It is the purpose of this note to exhibit such a set in R
4 and,incidentally, show that the trivariate counterexample in [B] can be further refined into a GC2-set with justtwo maximal hyperplanes.
1

Construction of a GC2-set in Rd
Here is a well known recipe for obtaining a GC2-set in Rd. Start with hyperplanes H0, . . . , Hd in R
d ingeneral position. This means that any d of them have exactly one point in common and that point is noton the remaining hyperplane. In symbols,
Hi 6⊃ {ai} := ∩j 6=iHj , i = 0, . . . , d.
Now choose bij on the line through ai and aj and different from either point. In symbols,
bij ∈ ♭{ai, aj}\{ai, aj}, 0 ≤ i < j ≤ d.
Note that bij fails to lie in Hi ∪ Hj since, otherwise ai ∈ Hi or aj ∈ Hj , a contradiction.
LetA := {ai : 0 ≤ i ≤ d}, B := {bij =: bji : 0 ≤ i < j ≤ d}.
I claim thatT := A ∪ B
is a GC2-set. Indeed, for each 0 ≤ i ≤ d, Hi contains all aj for j 6= i, hence all bjk with j 6= i 6= k, making
Hi 2-maximal in the sense that #(T ∩ Hi) = dimΠ2(Rd−1). Further,
(1) T\(Hi ∪ {ai}) = {bij : j 6= i},
a set of d elements, hence contained in some hyperplane Ki. However, this hyperplane cannot contain ai
since, with each bij it then would also have to contain aj , hence would have to contain A, therefore Ki = Hj ,all j, contradicting the assumption that the hyperplanes H0, . . . , Hd are in general position. This shows that
T\(Hi ∪ Ki) = {ai}, 0 ≤ i ≤ d,
while (1) implies thatT\(Hi ∪ Hj) = {bij}, 0 ≤ i < j ≤ d.
Therefore, T is a GC2-set. In particular, T is 2-correct.
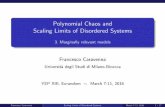
The ‘move’
aj
ak
ai
b′jk
bjk
bij
bik
(2) Figure. The placement of the bjk and the ‘move’ ijk.
2

Now consider the point set T′ obtained from T by one or more of the following kind of ‘move’: for atriple ijk with i 6= j 6= k 6= i, we replace bjk by a point b′jk in the punctuated flat ♭{bij , bik}\{bij, bik},making certain that no other ’move’ changes the points bij , bik. This ijk ’move’ takes place entirely withinthe plane
Pijk := ♭{ai, aj , ak},
hence entirely within the hyperplanes Hh, h 6∈ {i, j, k}, hence does not increase the number of points in anyone hyperplane but does move one of the points from Hi into Ki, thus destroying the maximality of Hi. Wealso require that at most one point is removed in this fashion from any one Hi. Finally, note that neitherbjk nor b′jk are in Hj ∪ Hk, i.e.,
(3) {bjk, b′jk} ∩ (Hj ∪ Hk) = ∅,
as we observed earlier for bjk, to which we now add that if, e.g., b′jk ∈ Hk, then, as bij ∈ Hk, also bik ∈ Hk,therefore, as ai ∈ Hk, also ak ∈ Hk, a contradiction.
Proposition. The set T′ resulting from such ‘moves’ is again a GC2-set.
Proof: We must, for each τ ∈ T′, show T′\{τ} to be contained in the union of two hyperplaneswhich does not contain τ . We follow [A1] by first proving that T′ is 2-correct and then proving that
(4) ∀τ ∈ T′ ∃hyperplanes Hτ , Kτ , (T′\{τ}) ⊂ (Hτ ∪ Kτ ).
The 2-correctness of T′ then implies that τ 6∈ (Hτ ∪ Kτ ). τ ∈ T′.
T′ is 2-correct: Since #T′ = #T = dim Π≤2(Rd), it is sufficient to prove that δT′ is 1-1 on Π≤2(R
d).For this, recall the observation that the ’move’ ijk takes place entirely within the plane Pijk = ♭{ai, aj , ak},and replaces one of the six points of T in Pijk by another point on that plane in such a way that the sixpoints in Pijk of the resulting T′ form again a 2-correct set in that plane (the effect of removing bij from
♭{aj , ak} and placing its replacement b′jk in ♭{bij , bik}\{bik, bik}). Thus, if δT′p = 0 for some p ∈ Π≤2(Rd),
then p must vanish on all of Pijk, and this holds for every Pijk with {i, j, k} a 3-subset of {0, . . . , d} whetheror not a move took place in it, hence p must vanish on T, hence p = 0, by the 2-correctness of T.
proof of (4) is by cases, and uses b∗jk to denote bjk or b′jk as the case may be.
Case τ = ai: If no point was removed from Hi, then
(5) T\(Hi ∪ {ai}) = {b∗ij : j 6= i},
a set of d elements, hence contained in some hyperplane, K ′i, proving (4) for this case. If, on the other
hand, some point was removed from Hi, then it was moved into the afore-mentioned K ′i, hence, either way,
(T′\{ai}) ⊂ (Hi ∪ K ′i).
Case τ = bjk: If all ‘moves’ took place in Hj or Hk, then, by (3), T′\(Hj ∪ Hk) = {bjk}. Otherwise,any ‘move’ not entirely within Hj ∪Hk must involve both aj and ak, and, as bjk was not moved, must be a‘move’ jik or kij. Assume without loss of generality that it was the ‘move’ jik. Then
T′\(Hk ∪ {bjk}) = {b∗kr : r 6= j, k} ∪ {ak},
a set of d points, hence contained in some hyperplane K ′k, proving (4) for this case.
Case τ = b′jk: Then, no other ‘move’ could have involved j and k, hence, all other ‘moves’ took placeeither entirely in Hj or in Hk. Therefore, with (3), T′\(Hj ∪ Hk) = {b′jk}.
3

We now know that T′ is, indeed, a GC2-set, with certain Hi now not maximal for T′. Could our ‘moves’have generated a new maximal hyperplane for T′ different from the Hi?
To answer this question, we give an argument inspired by [A1]. Assume that H is such a hyperplane,and let
µ := #(A ∩ H).
Then µ < d since, otherwise, H = Hi for some i (if µ = d), or H = Rd (if µ = d + 1), and both of these
possibilities are ruled out by our assumptions. Suppose that aj ∈ H while ak 6∈ H . Then bjk 6∈ H and if T′
contains instead b′kj obtained through a ‘move’ ijk then, as ak 6∈ H , the line ♭{ai, ak} has at most one pointin common with H , hence the point bik on that flat could be chosen so as not to lie in H , hence the point b′jk
can be chosen on the line ♭{bij , bik} so as not to lie in H . Hence, either way, for every j, k with aj ∈ H 6∋ ak,there is a point in T′\H , with different pairs (j, k) giving rise to different points. Since there are µ(d+1−µ)such pairs, and in addition, #(A\H) = d + 1 − µ, we get altogether at least (1 + µ)(d + 1 − µ) pointsfrom T′ not in H while maximality of H requires #(T′\H) to equal dimΠ≤2(R
d)− dimΠ≤2(Rd−1) = d + 1
which only leaves the conclusion that µ = 0. However, even if, at this point, H contained B = T′\A, wecould make that impossible in case d > 2 by changing one of the unmoved bjk from the unique point ofintersection of ♭{aj , ak} with H to any other point on that line (other than aj or ak), thus making B = T′\Anot containable in a hyperplane.
We haved proved the following
Corollary. For d > 2, the (possibly slightly modified) GC2-set T′ has as maximal hyperplanes only thoseHi for which there was no ‘move’ ijk.
What is the maximal number of Hi that could have lost their maximality? This will depend on d since,e.g., for d = 2, just one hyperplane Hi can be deprived of a point by such a ‘move’ but this happens only atthe cost of generating a new maximal hyperplane, namely Ki.
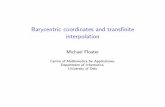
a3
a2
a1
a0
(a) (b)
(6) Figure. A 2-point variation (b) of a quadratic principal lattice (a) in R3 has only 2 maximals.
For d = 3, after the ‘move’ 012, with b′12 now not in H0, we cannot move the other two b-points withinH0 nor do we want to move them out of H0. We are also obliged not to move the points b01 and b02, henceare left with just one other still movable point in B, namely b03, which we could move within H1 or H2, thusmoving it out of H2 or H1. Let’s make the ‘move’ 103, which requires us not to have moved b01 nor b13.
The resulting T′ has only two of the Hi still maximal. This is an improvement over the result in [B]where I made only the first ‘move’, hence retained 3 maximal hyperplanes.
For d = 4, the ‘move’ 012 will, as we saw in the case d = 3, permit, e.g., the ‘move’ 103 within H4, andthese two ‘moves’ remove b12 from H0 and b03 from H1. This ties down b01, b02 and b13, leaving just b23 inH4 free to move, in the ‘move’ 423 which removes b23 from H4 and ties down b24 and b34 but leaves b04, b14
4

free to move; both lie in H2 ∩ H3, suggesting the ‘move’ 204 which removes b04 from H2 and/or the ‘move’314 which removes b14 from H3. Could we do both ‘moves’? The ‘move’ 204 requires us to keep b02 andb24, while the ‘move’ 314 requires us to keep b13 and b34. Hence we can do both ‘moves’ and, after those two‘moves’, have altogether moved b12 from H0, b03 from H1, b04 from H2, b14 from H3, and b23 from H4 whilekeeping fixed b01, b02, b13, b24, b34.
Theorem. Already in R4, there are GC2-sets without any maximal hyperplanes.
Such a result was achieved by Apozyan in [A1] only in R6 by a more cautious set of d + 1 ‘moves’ any
two of which had only one index in common, thereby ensuring that the bij , bik used in the ‘move’ ijk willnot be involved in any other ‘move’ while it is only necessary to ensure that neither will be moved by anothermove; however, such a set of d + 1 cautious ‘moves’ is only realizable for d > 5.
o x x · ·x o · x ·x · o · x· x · o x· · x x o
o x x · · · ·· o · x · x ·· · o · x x ·x · · o x · ·· x · · o · xx · · · · o x· · x x · · o
(7) Figure. My ‘moves’ vs Apozyan’s ‘moves’.
Acknowledgements. I acknowledge with pleasure the hours spent with Tomas Sauer in September2011 working our way through the thesis [A1] and thank Hakop Hakopian for the kindness of providing mewith a copy of it. My debts to Armen Apozyan are acknowledged throughout this note.
References
[A1] Armen Apozyan (2011), “On multivariate polynomial interpolation, GCn-sets and Gasca-Maetzu con-jecture”, dissertation, Institute of Mathematics of the NAS RA, Yerevan (Armenia).
[A2] Armen Apozyan (2011), “A six-dimensional counterexample for the GMd conjecture”, Jaen J. Approx.
3(2), 161–172.
[B] Carl de Boor (2008), “Multivariate polynomial interpolation: conjectures concerning GC-sets”, Numer.
Algorithms 150(1), 1–23.
[CG] J. M. Carnicer and M. Gasca (2003), “On Chung and Yao’s geometric characterization for bivariatepolynomial interpolation”, in Curve and Surface Design: Saint-Malo 2002 (Tom Lyche, Marie-LaurenceMazure, and Larry L. Schumaker Eds.), Nashboro Press (Brentwood TN), 11–30.
[CY] K. C. Chung and T. H. Yao (1977), “On lattices admitting unique Lagrange interpolations”, SIAM J.
Numer. Anal. 14, 735–743.
[GM] M. Gasca and J. I. Maeztu (1982), “On Lagrange and Hermite interpolation in IRk”, Numer. Math. 39,1–14.
21sep12
5