Modal Analysis of MDOF Unforced Undamped Systems · PDF fileLecture 20: MODAL ANALYSIS OF MDOF...
9
20 Modal Analysis of MDOF Unforced Undamped Systems 20–1
Transcript of Modal Analysis of MDOF Unforced Undamped Systems · PDF fileLecture 20: MODAL ANALYSIS OF MDOF...

20Modal Analysis
of MDOF UnforcedUndamped Systems
20–1

Lecture 20: MODAL ANALYSIS OF MDOF UNFORCED UNDAMPED SYSTEMS
TABLE OF CONTENTS
Page§20.1 Introduction . . . . . . . . . . . . . . . . . . . . . 20–3
§20.2 Modal Analysis of Unforced Undamped MDOF System . . . . . 20–3§20.2.1 Natural Frequencies . . . . . . . . . . . . . . . 20–3§20.2.2 Vibration Modes . . . . . . . . . . . . . . . . 20–3§20.2.3 Generalized Mass and Stiffness . . . . . . . . . . . 20–5§20.2.4 Eigenvector Mass Orthonormalization . . . . . . . . . 20–5§20.2.5 Generalized Coordinates and Modal Matrix . . . . . . . 20–6§20.2.6 Modal Equations of Motion . . . . . . . . . . . . 20–6§20.2.7 Modal Initial Conditions . . . . . . . . . . . . . . 20–7
§20.3 Unforced Response Example . . . . . . . . . . . . . . . 20–7
20–2

§20.2 MODAL ANALYSIS OF UNFORCED UNDAMPED MDOF SYSTEM
§20.1. Introduction
This subject of this Lecture and of the next one is modal analysis. This is a technique by which theequations of motion (EOM), which are originally expressed in physical coordinates, are transformedto modal coordinates using the eigenvalues and eigenvectors gotten by solving the undampedfrequency eigenproblem. The transformed equations are called modal equations. In a mathematicalcontext, modal coordinates are also called generalized coordinates, or principal coordinates. Forstructural dynamics they can be interpreted as response amplitudes of orthonormalized vibrationmodes.
The distinguishing feature of modal equations is that for an undamped system they uncouple.Consequently, each modal equation may be solved independently of the others. Once computed,modal responses may be transformed back to physical coordinates and superposed to produce thephysical response of the original system.
The method is a particular case of what is known in applied mathematics as orthogonal projectionmethods. Instead of tackling the original equations directly, they are projected onto another space(the ‘modal space” in the case of dynamics) in which equations decouple.
§20.2. Modal Analysis of Unforced Undamped MDOF System
Here we retake the two-DOF example introduced in §19.1. As numerical values we take*
m1 = 2, m2 = 1, c1 = c2 = 0, k1 = 6, k2 = 3, p1 = p2 = 0. (20.1)
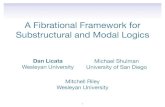
The resulting undamped and unforced system is displayed in Figure 20.1. The known matrices andvectors in the general EOM: Mu + Cu + Ku = p, become
M =[
2 00 1
], C =
[0 00 0
], K =
[9 −3
−3 3
], p =
[00
]. (20.2)
and the equations become[2 00 1
] [u1
u2
]+
[9 −3
−3 3
] [u1
u2
]=
[00
]. (20.3)
§20.2.1. Natural Frequencies
The free-vibration eigenproblem associated with (20.3) is[9 −3
−3 3
] [U1
U2
]= ω2
[2 00 1
] [U1
U2
], or
[9 − 2ω2 −3
−3 3 − ω2
] [U1
U2
]=
[00
]. (20.4)
The characteristic polynomial equation is
det
[9 − 2ω2 −3
−3 3 − ω2
]= 18 − 15ω2 + 2ω4 = (3 − 2ω2)(6 − ω2) = 0. (20.5)
The roots of (20.5) give the two squared frequencies
ω21 = 3
2= 1.5, ω2
2 = 6. (20.6)
* Note that no units are specified; being tacitly understood that a consistent set of physical units, SI or English, is usedthroughout.
20–3

Lecture 20: MODAL ANALYSIS OF MDOF UNFORCED UNDAMPED SYSTEMS
��
F = m u..
F = k us1
s2
(a) (b)
k = 32
k = 61
u = u (t)22
u = u (t)11
1
I1 1 1
F = m u..I2 2 2
1
s2 1F = k (u −u )2 2
F
1Mass m = 2
2Mass m = 1
Static equilibriumposition
Static equilibriumposition
x
Figure 20.1. Two-DOF, unforced, undamped spring-mass example system: (a) configuration, (b) DFBD.
§20.2.2. Vibration Modes
To get U1, replace ω21 = 3/2 into the second of (20.4), set its first entry U11 to one, and solve for
the second entry U12:[9−2 × (3/2) −3
−3 3−3/2
] [U11
U12
]=
[6 −3
−3 3/2
] [U11
U12
]=
[00
]⇒ U1 =
[12
]. (20.7)
To get U2, replace ω22 = 6 into the second of (20.4), set its first entry U21 to one, and solve for the
second entry U22:[9−2 × 6 −3
−3 3−6
] [U21
U22
]=
[ −3 −3−3 −3
] [U21
U22
]=
[00
]⇒ U2 =
[1
−1
]. (20.8)
We now apply the first normalization method described in §19.3.3, by forcing the largest entry tobe +1:
φ1 = 12 U1 =
[1/21
], φ2 = U2
[1
−1
]. (20.9)
The vibration modes are pictured in Figure 20.2. Note that in the first mode the masses oscillate inphase while in the second one they are 180◦ out of phase, moving opposite to each other.
It is convenient at this point to verify the orthogonality property: φTi Mφ j = 0 and φT
i Kφ j = 0for i = j . Here only one combination, namely i = 1 and j = 2, needs to be tested:
φT1 M φ2 = [ 1/2 1 ]
[2 00 1
] [1
−1
]= 0, φT
1 K φ2 = [ 1/2 1 ]
[9 −3
−3 3
] [1
−1
]= 0. (20.10)
20–4

§20.2 MODAL ANALYSIS OF UNFORCED UNDAMPED MDOF SYSTEM
��Mode 1, ω = 3/2
1
1
1/2
21
��Mode 2, ω = 6
−1
22
1Mass m
2Mass m
Red lines mark thestatic equilibriumpositions of the masses
Figure 20.2. Vibration modes for example system.
Note that there is no need to explicitly check that φT2 M φ1 = 0 and φT
2 K φ1 = 0 because(φT
1 M φ2)T = φT
2 MT φ1 = φT2 M φ1, since M = MT if M is symmetric. Likewise for K.
The vibration modes (20.9) are orthogonal but not orthonormal with respect to the mass matrix.To achieve that property it is necessary to rescale them so that generalized masses are unity. Thisis done next.
§20.2.3. Generalized Mass and Stiffness
Next we compute the generalized masses and stiffnesses associated with the modes (20.10):
M1 = φT1 M φ1 = [ 1/2 1 ]
[2 00 1
] [1/21
]= 3/2,
M2 = φT2 M φ2 = [ 1 −1 ]
[2 00 1
] [1
−1
]= 3,
K1 = φT1 K φ1 = [ 1/2 1 ]
[9 −3
−3 3
] [1/21
]= 9/4,
K2 = φT2 K φ2 = [ 1 −1 ]
[9 −3
−3 3
] [1
−1
]= 18.
(20.11)
Quick check:
ω21 = K1
M1= 9/4
3/2= 3/2, ω2
2 = K2
M2= 18
3= 6, (20.12)
as expected. Note that should eigenvectors be normalized in a different way, M1, M2, K1, K2 willbe generally different, but the ratios ω2
i = Ki/Mi remain invariant.
20–5

Lecture 20: MODAL ANALYSIS OF MDOF UNFORCED UNDAMPED SYSTEMS
§20.2.4. Eigenvector Mass Orthonormalization
Next we renormalize φ1 and φ2 to get unit generalized masses. These rescaled vectors will beinitially denoted by φ1 and φ2, respectively. After renormalization the tildes are dropped.
Suppose φ1 = c1φ1. To find c1, insert this into 1 = φT1 M φ1 = (c1φ
T1 ) M (c1φ1) = c2
1φT1 M φ1 =
c21 × 3/2, whence c1 = 1/
√3/2 = √
2/3. Likewise c2 = 1/√
3. Dropping the tildes for brevity,the mass-orthonormalized vibration modes are
φ1 =√
2
3
[1/21
]=
[0.40880.8165
], φ2 =
√1
3
[1
−1
]=
[0.5773
−0.5773
](20.13)
After this renormalization,
φT1 M φ1 = 1, φT
2 M φ2 = 1, φT1 K φ1 = 3
2= ω2
1, φT2 K φ2 = 6 = ω2
2. (20.14)
§20.2.5. Generalized Coordinates and Modal Matrix
We will express† the displacement vector u(t) in terms of normal coordinates η1(t) and η2(t), asfollows:
u =[
u1(t)u2(t)
]def= φ1 η1(t) + φ2 η2(t) = [ φ1 φ2 ]
[η1(t)η2(t)
]= Φη. (20.15)
In a mathematical context, the ηi (t)s are called generalized coordinates or principal coordinates.They represent the amplitude of the orthonormalized mode shapes, or modal amplitudes for short.Equation (20.15) is an instance of modal superposition, which is a general feature of linear dynamicalsystems.
Two new matrix symbols appear in (20.15). The normal coordinate vector η collects η1(t) andη2(t) as its entries. The modal matrix Φ is formed by stacking the mass-orthogonal eigenvectorsas columns:
Φ = [ φ1 φ2 ] = 1√
61√3
2√6
− 1√3
=
[0.4082 0.5773
0.8165 −0.5773
]. (20.16)
Note that u = Φ η and u = Φ η, because Φ does not depend on time. With the help of Φ, theorthonormality conditions can be expressed compactly as‡
ΦT M Φ = Mg = I =[
1 00 1
], ΦT K Φ = Kg = diag[ω2
i ] =[
ω21 0
0 ω22
]=
[3/2 00 6
].
(20.17)
Here Mg and Kg denote the generalized mass matrix and generalized stiffness matrix, respectively.If Φ is built with mass-orthogonalized eigenvectors, as in (20.16), Mg reduces to the identity matrixwhile Kg becomes a diagonal matrix with squared frequencies stacked along its diagonal.
† This is a consequence of the so-called expansion theorem for MDOF systems; in the applied mathematics context it isknown as the spectral decomposition. See Section 10.1.9 of the Craig-Kurdila textbook for details.
‡ The Craig-Kurdila textbook uses bold italics symbols for generalized mass and stiffness matrices. Since those fonts arenot available to the TEX document processor used for these Lectures, we shall use g subscripts to denote those quantities.
20–6

§20.3 UNFORCED RESPONSE EXAMPLE
§20.2.6. Modal Equations of Motion
To transform the undamped, unforced EOM: Mu+Ku = 0 to modal coordinates, replace u = Φηand u = Φη into it, and premultiply by ΦT :
ΦT M Φ η + ΦT K Φη = ΦT 0 = 0. (20.18)
Using the generalized matrices introduced in (20.17) we get
η + Kg η = 0, (20.19)
For the example problem,[1 00 1
] [η1(t)η2(t)
]+
[3/2 00 6
] [η1(t)η2(t)
]=
[00
]. (20.20)
Because the matrices in (20.20) are diagonal, (20.20) uncouples into two homogeneous, second-order ODE already in canonical form:
η1(t) + (3/2) η1(t) = 0, η2(t) + 6 η2(t) = 0. (20.21)
Each ODE models an unforced, undamped SDOF oscillator. As such it may be treated using themethods of Lecture 17 as long as initial conditions (IC) are known. Once solutions η1(t) and η2(t)are available, they can be combined via the mode superposition relation (20.15) to get the physicalresponse u(t) = Φη(t). But to solve (20.21) we need their IC in modal coordinates.
§20.2.7. Modal Initial Conditions
Suppose that the initial conditions for a MDOF system are
u(0) = u0, u(0) = v0. (20.22)
Here u0 and v0 denote vectors of initial displacements and velocities, respectively. Because u(t) =Φη(t) and u(t) = Φ η(t) for any time t , setting t = 0 we get
u0 = u(0) = Φη(0), v0 = u(0) = Φ η(0). (20.23)
These can be solved for η0 = η(0) and η0 = η(0) by inverting the modal matrix:
η0 = η(0) = Φ−1 u0, η0 = η(0) = Φ−1 v0. (20.24)
or equivalently, solving the linear systems (20.23). But there is a more elegant scheme that onlyrequires matrix multiplication. Postmultiplying both sides of ΦT MΦ = I by Φ−1 gives Φ−1 =ΦT M, whence
η0 = ΦT M u0, η0 = ΦT M v0. (20.25)
Remark 20.1. Should the eigenvectors φi not be mass-orthonormal, we have the more complicated rela-tions Mg η0 = ΦT M u0 and Mg η0 = ΦT M v0, in which Mg = ΦT MΦ is the generalized mass matrix.Consequently
η0 = M−1g ΦT M u0, η0 = M−1
g ΦT M v0. (20.26)
Since Mg is always diagonal, so is M−1g . Consequently (20.26) merely amounts to scaling entries of η0 and
η0 by reciprocals of the generalized masses.
20–7

Lecture 20: MODAL ANALYSIS OF MDOF UNFORCED UNDAMPED SYSTEMS
0 2 4 6 8 10 12
−1
−0.5
0
0.5
1
0 2 4 6 8 10 12
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
u (t)1
u (t)1
u (t)2 u (t)2
.
.
Time tTime t
Dis
plac
emen
ts
Vel
ociti
es
Figure 20.3. Response histories for example system under initial conditions u1(0) = 1, others zero.
§20.3. Unforced Response Example
The following initial conditions (IC) are specified for the 2-DOF mass-spring system of Figure20.1: mass m1 is given a unit initial velocity along +x , while all other initial values are zero. Inmatrix form:
u0 =[
00
], v0 =
[10
]. (20.27)
The modal IC are obtained from (20.25) as
η0 =[
η10
η20
]= ΦT M u0 =
1√
62√6
1√3
− 1√3
[
2 00 1
] [00
]=
[00
],
η0 =[
η10
η20
]= ΦT M v0 =
1√
62√6
1√3
− 1√3
[
2 00 1
] [10
]=
2√
62√3
=
[0.81651.1547
].
(20.28)
The solution of the modal equations (20.20) for the initial conditions (20.28) are
η1(t) = η10
ω1sin ω1t = 2
3√
3sin(
√6 t) = 2
3sin(
√3/2 t) = 0.6667 sin(1.2247 t),
η2(t) = η20
ω2sin ω2t = 2/
√3√
6sin(
√6t) = 2
3√
2sin(
√6 t) = 0.4714 sin(2.4495 t).
(20.29)
These can be transformed back to physical coordinates via the modal matrix, as per u(t) = Φη(t).Here are the calculations for the mass displacement responses, with numerical expressions listed
20–8

§20.3 UNFORCED RESPONSE EXAMPLE
to 4-place accuracy:
[u1(t)u2(t)
]=
1√
61√3
2√6
− 1√3
[ 2
3 sin(√
3/2 t)2
3√
2sin(
√6 t)
]=
1
3
√23
(sin(
√3/2t) + sin(
√6t)
)13
√23
(2 sin(
√3/2t) − sin(
√6t)
)
=[
0.2722(
sin(1.2247t) + sin(2.4495t))
0.2722(
2 sin(1.2247t) − sin(2.4495t))
]
(20.30)
Mass velocities are obtained by direct numerical differentiation with respect to t :
[u1(t)u2(t)
]=
[ 13
(cos(
√3/2t) + 2 cos(
√6t)
)23
(cos(
√3/2t) − cos(
√6t)
)]
=[
0.3333(
cos(1.2247t) + 2 cos(2.4495t))
0.6667(
cos(1.2247t) − cos(2.4495t))
]
(20.31)
The results (20.30) and (20.31) are plotted in Figure 20.3 over 0 ≤ t ≤ 12. Since there is nodamping, the harmonic oscillation patterns visible in the Figure will repeat with no distortions oramplitude decay. In other words, the free vibrations will go on forever.* Observe that the initialconditions (20.27) are correctly reproduced.
* The reason behind the repeating oscillation patterns in Figure 20.3 is that frequency ω2 is exactly twice ω1 in the example.
20–9





![A Fibrational Framework for Substructural and Modal ......A Judgemental Deconstruction of Modal Logic [Reed’09] Adjoint Logic with a 2-Category of Modes [L.Shulman’16] A Fibrational](https://static.fdocument.org/doc/165x107/600c830a7eb54a53f75f0b13/a-fibrational-framework-for-substructural-and-modal-a-judgemental-deconstruction.jpg)