Lecture 4.1-MDOF Systems.ppt - West Virginia...
20
MAE 340 – Vibrations Multi-Degree-of-Freedom Systems Section 4.1
Transcript of Lecture 4.1-MDOF Systems.ppt - West Virginia...

MAE 340 – Vibrations
Multi-Degree-of-Freedom Systems
Section 4.1

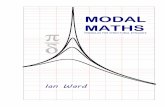
Examples of Multi-Degree-of-Freedom (MDOF) Systems
Swaying Building
MAE 340 – Vibrations 2
k3
m3
k4
m4
x4
x3
Fcos ωt
k2
m2
k1
m1
x2
x1
k ck c
Moving Vehicle
x1
x3
x2
Flying Aircraft

Two DOF Spring-Mass System
• Given:
� m1 = 9 kg
� m2 = 1 kg
� k1 = 24 N/m
� k2 = 3 N/m
• Find:
� ωn1, ωn2
� x1 (t ), x2 (t )
MAE 340 – Vibrations 3
k1m1
x1k2
x2
m2
� x1,0 = 1 mm
� x2,0 = 0 mm
� v1,0 = 0 m/s
� v2,0 = 0 m/s

Two DOF Spring-Mass System
• Sol’n:
Step 1: Derive system differential equations
MAE 340 – Vibrations 4
Mass 1 Mass 2

Two DOF Spring-Mass SystemWrite out coupled equations as matrix equation
MAE 340 – Vibrations 5
With variables:
With numbers:

Solving Differential EquationStep 2: Solve matrix differential equation
MAE 340 – Vibrations 6
Assume a solution:
)sin()sin(
)sin(
)(
)()(
2
1
2
1
2
1φω
φω
φω+
=
+
+=
= t
u
u
tu
tu
tx
txtx
n
n
n
)sin()( φω += tutxn
=
=
)(
)()(
2
1
tx
txtx
&&
&&&&

Solving Differential EquationSubstitute back into system differential equation:
MAE 340 – Vibrations 7
Simplify:
=
0
0u is a trivial solution; we are not interested
in it.

Solving Differential EquationIf we could solve for then we
MAE 340 – Vibrations 8
could get
The only way to get a non-trivial solution would be if it were impossible to solve for
( ) 12 −+− KM
nω
( )
==+−=
−
0
000
12KMu
nω
but this is still the trivial solution!
( ) 12 −+− KM
nω
When is a matrix not invertible??

Solving Differential Equation
When the determinant is zero!!
MAE 340 – Vibrations 9
Need to find ωn that satisfy:
Recall that the determinant of a matrix is computed as follows:
( ) 0det2 =+− KMn
ω

Solving Differential EquationPutting in the numbers:
MAE 340 – Vibrations 10

Mode 1: ωn1 =
Substituting ωn1 into equation from slide 7:
MAE 340 – Vibrations 11

Mode 1These equations are not linearly independent. There is no single solution. Instead there is a set of solutions. But each solution must satisfy:
MAE 340 – Vibrations 12
We could use a scaling factor (s):
This is the “Mode Shape”.

Mode 1Usually s is chosen so that the largest u value is 1:
MAE 340 – Vibrations 13
Therefore, the equation of motion, considering only the first mode is:
This is the “Normalized Mode Shape”.

Mode 2: ωn2 =
Substituting ωn2 into equation from slide 7:
MAE 340 – Vibrations 14

Mode 2
The normalized mode shape is:
The equation of motion, considering only the second mode is:
MAE 340 – Vibrations 15

Both Modes Together
The overall equation of motion, considering both modes is:
MAE 340 – Vibrations 16
The unknowns (A1, Φ1, A2, Φ2) must be determined from the initial conditions.

=)0(x
=)(tx&
Solving for A1, Φ1, A2, Φ2
• Applying the initial conditions:
MAE 340 – Vibrations 17
=)(tx
=)0(x&

Solving for A1, Φ1, A2, Φ2
• Need to solve the nonlinear equations:
MAE 340 – Vibrations 18

Solving for A1, Φ1, A2, Φ2
MAE 340 – Vibrations 19

Solving for A1, Φ1, A2, Φ2
• Therefore, the overall equation of motion is:
MAE 340 – Vibrations 20
![The Fundamentals of Modal Testingliterature.cdn.keysight.com/litweb/pdf/5954-7957E.pdf · 2000. 9. 2. · MDOF impulse response/ free decay k1 k3 k2 k4 c1 c3 c2 4 m1 m2 m 3 [m]{x}](https://static.fdocument.org/doc/165x107/60d26ca59f186d32213cccdf/the-fundamentals-of-modal-2000-9-2-mdof-impulse-response-free-decay-k1-k3.jpg)