Mit2 092 f09_lec23
4
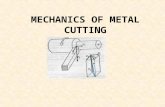
2.092/2.093 — Finite Element Analysis of Solids & Fluids I Fall ‘09 Lecture 23 - Solution of Kφ = λM φ Prof. K. J. Bathe MIT OpenCourseWare Reading assignment: Chapters 10, 11 We have the solutions 0 < λ 1 λ 2 ≤ ... ≤ λ n . Recall that: ���� ≤ ���� ���� φ1 φ2 φn Kφ i = λ i Mφ i (1) In summary, a necessary and sufficient condition for φ i is that Eq. (1) is satisfied. The orthogonality conditions are not sufficient, unless q = n. In other words, vectors exist which are K- and M-orthogonal, but are not eigenvectors of the problem. � � Φ = φ 1 . . . φ n (2) ⎡ ⎤ λ 1 zeros Φ T MΦ = I ; Φ T KΦ = Λ = ⎢ ⎣ . . . ⎥ ⎦ (3) zeros λ n Assume we have an n × q matrix P which gives us P T MP = I ; P T KP = A diagonal matrix q×q q×q → Is a ii necessarily equal to λ i ? ⎡ ⎤ a 11 zeros ⎢ ⎥ ⎣ a 22 ⎦ . zeros . . If q = n, then A = Λ, P = Φ with some need for rearranging. If q<n, then P may contain eigenvectors (but not necessarily), and A may contain eigenvalues. Rayleigh-Ritz Method This method is used to calculate approximate eigenvalues and eigenvectors. v T Kv ρ(v)= v T Mv λ 1 ≤ ρ (v) ≤ λ n λ 1 is the lowest eigenvalue, and λ n is the highest eigenvalue of the system. λ 1 is related to the least strain energy that can be stored with v T Mv = 1: φ T 1 Kφ 1 = λ 1 (if φ 1 T Mφ 1 = 1) 1
-
Upload
rahman-hakim -
Category
Engineering
-
view
87 -
download
3
description
All of material inside is un-licence, kindly use it for educational only but please do not to commercialize it. Based on 'ilman nafi'an, hopefully this file beneficially for you. Thank you.
Transcript of Mit2 092 f09_lec23

2.092/2.093 — Finite Element Analysis of Solids & Fluids I Fall ‘09
Lecture 23 - Solution of Kφ = λM φ
Prof. K. J. Bathe MIT OpenCourseWare
Reading assignment: Chapters 10, 11
We have the solutions 0 < λ1 λ2 ≤ . . . ≤ λn . Recall that:���� ≤ ���� ����
φ1 φ2 φn
Kφi = λiMφi (1)
In summary, a necessary and sufficient condition for φi is that Eq. (1) is satisfied. The orthogonality conditions are not sufficient, unless q = n. In other words, vectors exist which are K- and M -orthogonal, but are not eigenvectors of the problem. � �
Φ = φ1 . . . φn (2) ⎡ ⎤ λ1 zeros
ΦT M Φ = I ; ΦT KΦ = Λ = ⎢ ⎣ . . . ⎥ ⎦ (3)
zeros λn
Assume we have an n × q matrix P which gives us
P T MP = I ; P T KP = A diagonal matrix q×q q×q
→
Is aii necessarily equal to λi? ⎡ ⎤ a11 zeros ⎢ ⎥ ⎣ a22 ⎦
.zeros . .
If q = n, then A = Λ, P = Φ with some need for rearranging. If q < n, then P may contain eigenvectors (but not necessarily), and A may contain eigenvalues.
Rayleigh-Ritz Method
This method is used to calculate approximate eigenvalues and eigenvectors.
vT Kv ρ(v) =
vT Mv
λ1 ≤ ρ (v) ≤ λn
λ1 is the lowest eigenvalue, and λn is the highest eigenvalue of the system. λ1 is related to the least strain energy that can be stored with vT Mv = 1:
φT 1 Kφ1 = λ1 (if φ1
T Mφ1 = 1)
1

Lecture 23 Solution of Kφ = λMφ 2.092/2.093, Fall ‘09
Note that twice the strain energy is obtained when the system is subjected to φ1. If the second pick for v gives a smaller value of ρ(v), then the second pick is a better approximation to φ1.
q Assume φ = Σ ψixi, and the Ritz vectors ψi are linearly independent. Also, Ψ = [ ψ1 . . . ψq ]. The xi will
i=1
be selected to minimize ρ(φ). Hence, calculate ∂ ρ(φ) = 0. (See Chapter 10.) The result is ∂xi
˜ Mx Kx = ρ ˜ (4)
K̃ = ΨT KΨ ; M̃ = ΨT MΨ (5)
We solve Eq. (4) to obtain ρ1, ρ2, . . . , ρq and x1, x2, . . . , xq . Then our approximation to λ1, . . . , λq is given by ρ1, . . . , ρq.
λ1 ≤ ρ1 ; λ2 ≤ ρ2 ; λq ≤ ρq
� � φ1 ≈ φ1 ; φ2 ≈ φ2 ; etc.
where φ1 . . . φq n×q
= Ψ n×q
[ x1 . . . xq ] q×q
.
If the q Ritz vectors span the subspace given by φ1, . . . , φq, then we obtain (λ1 . . . λq) and (φ1 . . . φq). Pictorially, an example:
If ψ1 and ψ2 are in the x-y plane, then by the Rayleigh-Ritz analysis we get φ1, φ2. Major shortcoming: in general, we do not know the accuracy of (ρi, φi).
The Subspace Iteration Method
Pick X1 , then calculate for k = 1, 2, 3, . . . n×q
KXk+1 = MXk (a)
This is inverse iteration with q vectors. Now perform the Rayleigh-Ritz solution:
Kk+1 = Xk
T +1KXk+1 ; Mk+1 = Xk
T +1MXk+1 (b)
Kk+1Qk+1 = Mk+1Qk+1Λk+1 (c)
Kk+1, Mk+1, and Qk+1 have dimensions q × q. Recall that we have KΦ = M ΦΛ from Eq. (1). We then have
QTk+1Kk+1Qk+1 = Λk+1 ; QT
k+1Mk+1Qk+1 = I (d)
Finally, Xk+1 = Xk+1Qk+1 (e)
Equations (b), (c), and (e) correspond to the use of the Rayleigh-Ritz method.
2

� �
� �� �
Lecture 23 Solution of Kφ = λMφ 2.092/2.093, Fall ‘09
Then, provided the vectors in X1 are not M -orthogonal to the eigenvectors we seek, we have (with “good” ordering) that ⎡ ⎤
λ1
Λk+1 → ⎢ ⎣ . . . ⎥ ⎦
λq
Xk+1 → φ1 . . . φq
In practice, we use q vectors to calculate the p lowest eigenvalues, with (say) q = 2p. In fact, the convergence λirate of the vectors is given by λq+1
.
If p = 2 and we have a multiplicity of 5 (or higher), q = 2p corresponds to not enough vectors. Ideally, we want λq+1 to be significantly larger than λp, so that λi is much less than 1 for i = 1, . . . , p. The “quite λq+1
conservative” way is to use q = max(2p, p + 8)
The textbook gives q = min(2p, p+8), which can also be used (apply the Sturm sequence check, see textbook); it will use less storage, but will generally need more iterations. For modern computers (specifically with parallel processing), the above formula for q is frequently more effective.
Notice that XkT +1MXk+1 = I because from (e),
QTk+1 X
T
k+1MXk+1 Qk+1 = I
Mk+1
3

MIT OpenCourseWare http://ocw.mit.edu
2.092 / 2.093 Finite Element Analysis of Solids and Fluids I Fall 2009 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.