MAE143a: Signals & Systems (& Control) Final Exam...
5
Click here to load reader
Transcript of MAE143a: Signals & Systems (& Control) Final Exam...

MAE143a: Signals & Systems (& Control) Final Exam (2011) solutions
Question 1. SIGNALS: Design of a noise-cancelling headphone system.
1a. Based on the low-pass filter given, design a high-pass filter, FH(s), with a cutoff frequency ofωH .
FH(s) =1
[(ωH/s)2 +0.75(ωH/s)+1][(ωH/s)2 +1.85(ωH/s)+1]. (1a)
Express this filter as a rational function ofs.
FH(s) =s4
[s2 +0.75ωHs+ ω2H][s2 +1.85ωHs+ ω2
H ]. (1b)
1b. Combining the low-pass and high-pass filters, describe howa band-pass filter,FB(s), may be constructed.
Put the low-pass and high-pass filters in series to make a band-pass filter. (1c)
Should you add them or multiply them? why?
You should multiply them, because they are being applied in series
(just like we multiply D(s) and G(s), which also appear in series).(1d)
Compute the single rational transfer function of the necessary band-pass filter,FB(s).
FB(s) = FL(s) ·FH(s) =
s4
[(s/ωL)2 +0.75(s/ωL)+1][(s/ωL)2 +1.85(s/ωL)+1][s2+0.75ωHs+ ω2H][s2 +1.85ωHs+ ω2
H ]
(1e)
1c. Now specify how you should selectωL andωH .
You may takeωL to be about 3000 Hz andωH to be about 2000 Hz to form the desired band-pass
filter. Actually, since both FL(s) and FH(s) mess up the phase of the signal near their
respective cutoff frequencies (that is, no linear filter is ideal...),
it is preferable to make ωL a tad higher than this, andωH a tad lower than this.
(1f)
1d. You notice that the mic is about 1 cm closer to the sound source than the speaker, and that the speed of soundis aboutv = 350 m/s. Assuming a purely sinusoidal tone atf = 2500 Hz [and, thus, a sinusoid with a wavelengthof λ = v/ f = 0.14m), about how much phase change will this cause?
It will cause about (1/14) ·360= 26◦ of phase lead. (1g)
What kind of compensation can you apply in your circuit to correct for this?
You can apply a bit of lag compensation, withD(s) = K(s+ z)/(s+ p) with p < z,
taking p/z ≈ 3 and√
pz = 2500Hz = 2500·2π rad/sec.
This better synchronizes the phase of the output from the speaker with the
audio signal it is designed to cancel, which takes a while to travel from the
microphone to the speaker.
(1h)
Question 2. SYSTEMS: Linearizing the dynamics of a pendulum. The nonlinear equations of motion of apendulum are
mℓ2 d2θdt2 = u−mgℓsin(θ).
2a. If the pendulum is held at a constant angleθ, calculate the corresponding equilibrium value of the torqueu.
u = mgℓsin(θ) Note also thatdθ/dt = 0. (2a)

2 MAE143a: Signals & Systems (& Control) Final Exam (2011) solutions
2b. Assuming that the perturbation quantities{θ′,u′} are small, linearize the full nonlinear equations of motionabout the equilibrium condition.
mℓ2 d2(θ+ θ′)dt2 = (u+ u′)−mgℓsin(θ+ θ′)
=⇒(sin identity)
mℓ2 d2(θ+ θ′)dt2 = (u+ u′)−mgℓ{sin(θ)cos(θ′)+cos(θ)sin(θ′)}
=⇒(small angle approximation)
mℓ2 d2(θ+ θ′)dt2 = (u+ u′)−mgℓ{sin(θ) ·1+cos(θ) ·θ′]}
=⇒(equilibrium condition)
mℓ2 d2(θ′)dt2 = u′−mgℓcos(θ) ·θ′
=⇒(rearrange)
[
d2
dt2 + a0
]
θ′ = b0u′ where a0 =gℓ
cos(θ), b0 =1
mℓ2
(2b)
Compute the linear transfer function fromU ′(s) to Θ′(s).
Θ′(s)U ′(s)
=b0
s2 + a0(2c)
Assumingm = 1 kg,ℓ = 1 m, andg = 9.8 m/s2, where are the poles and/or zeros of this transfer function?
Two poles at±√−a0 = ±
√
−gcos(θ)/ℓ.
Two zeros at infinity (a.k.a. the resaurant at the end of the universe).(2d)
2c. If θ = 0:
u = 0, two poles at±i ωd = ±i√
9.8, two zeros at infinity.
System is “neutrally stable” because of the poles on the imaginary axis.
The impulse response is a sinusoidal oscillation at frequency ωd that neither grows nor decays.
(2e)
2d. If θ = π/4:
u = mgℓ · .707, two poles at±i ωd = ±i√
.707·9.8, two zeros at infinity.
System is neutrally stable because of the poles on the imaginary axis.
The impulse response is a sinusoidal oscillation at frequency ωd that neither grows nor decays.
(2f)
2e. If θ = π/2:
u = mgℓ, two poles at the origin (a double integrator!), two zeros atinfinity.
System is neutrally stable because of the poles on the imaginary axis.
By taking the inverse Laplace transform ofY (s) = G(s) ·U(s) = (1/s2) ·1,
the impulse response is seen to be a unit ramp,y(t) = t for t > 0.
(2g)
2f. If θ = 3π/4:
u = mgℓ · .707, two poles at±√
.707·9.8, two zeros at infinity.
System is unstable stable because of the pole in the RHP.
The impulse response is a diverging exponential (plus a converging exponential).
(2h)
2g. If θ = π:
u = 0, two poles at±√
9.8, two zeros at infinity.
System is unstable stable because of the pole in the RHP.
The impulse response is a diverging exponential (plus a converging exponential).
(2i)

MAE143a: Signals & Systems (& Control) Final Exam (2011) solutions 3
Question 3. (& CONTROL): Root locus and Bode tools in classical control design. Consider the unstablesystem
G(s) =Y (s)U(s)
=1
(s−1)(s+10).
3a. TakingD(s) = K, rewriteH(s) = G(s)D(s)/[1+ G(s)D(s)] as a rational function ofs:
H(s) =K
K +(s−1)(s+10)=
Ks2 +9s+(K−10)
=K
(s+ z+)(s+ z−). (3a)
Compute the exact pole locations of the closed-loop system:
z± = [−9±√
81−4(K−10)]/2. (3b)
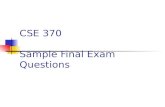
3b. TakingD(s) = K, accurately plot the root locus plot:
Note that the pair of closed-loop poles move in from the open-loop poles [that is,
from z± = (−9±√
121)/2 = (−9±11)/2= {−10,1}] for small K, along the real axis
to z± = (−9±√
0)/2 = −4.5 (i.e., both at the midpoint between the open-loop poles) for
K = 81/4+10= 30.25, and then move out along the vertical line directly above andbelow
this midpoint location to z± = (−9± i√
4(K −10)−81)/2 for K > 30.25.
The resulting plot is thus given below.
(3c)
−15 −10 −5 0 5−10
−8
−6
−4
−2
0
2
4
6
8
10
3c. Is proportional control sufficient to stabilize the system? Compute the minimum value ofK necessary tostabilize the system.
Yes.K > 10moves both poles into the LHP. (3d)
3d. If K is selected to achieve the fastest rise time possible while keepingMp ≤ 5%, where would the closed-looppoles be? What is the natural frequencyωn of these poles?
At s = −4.5±4.5i, as marked above, withζ = 0.707and ωn =√
4.52+4.52 ≈ 6.4.
[This is achieved withK ≈ 50.5.](3e)
3e. The open-loop systemG(s)D(s) has two more poles than zeros. Explain where the other two zeros of thissystem are, in terms of the intuitive mapping of the complex plane introduced by Riemann.
The other two zeros are effectively at infinity in the extended complex plane. When the extended
complex plane is mapped onto the Riemann sphere, with the origin mapped to the south pole, the
point at infinity is mapped to the north pole (a.k.a. the Restaurant at the End of the Universe).
(3f)

4 MAE143a: Signals & Systems (& Control) Final Exam (2011) solutions
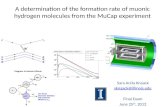
3f. Sketch the Bode plot corresponding toG(s). If proportional controlD(s) = K is applied with the gain adjustedto give a crossover frequencyωc = 5 rad/sec, what is the approximate phase margin in the closed-loop system?What value ofK achieves this crossover frequency?
10−4
10−2
100
10−2
10−1
100
101
102
103
−180
−170
−160
−150
−140
−130
−120
Noting the Bode plotting rules for both unstable poles as well as stable poles,
the Bode plot is given above. Note that the slope goes from 0 to-1 to -2, and the phase
gives a bump akin to that of a lead compensator, with a maximumof 55◦ of phase lead.
To get crossover atωc = 5 rad/sec, the gain should set as follows:
|G(iωc)D(iωc)| =K
|iωc −1| · |iωc +10| = 1 ⇒ K = 1 ·√
26·√
125≈ 57.
Crossover is not quite at the peak of the bump in the phase, resulting in a PM of only about 50◦.
(3g)
3g. Noting the approximate design guides available in the rootlocus and Bode settings, explain how these twointerpretations are consistent.
In the root locus plot, we saw thatθ = 45◦ ⇒ ζ = sin(θ) ≈ .7, and thus we expectedMp ≈ 5%.
In the Bode plot, we saw thatPM = 50◦, and thusζ ≈ PM/100= .5;
we will thus expected a bit more overshoot with this design (Mp ≈ 15%).
Significantly, note that these design guides are only approximate!!
(3h)

MAE143a: Signals & Systems (& Control) Final Exam (2011) solutions 5
Question 4. I want my... I want my PID! (or not...) A PID compensator may be written
DPID(s) = Kp
(
1+1
TIs+ TDs
)
= KpTDs2 + s
TD+ 1
TITD
s= K
(s+ z+)(s+ z−)
s,
whereK = KpTD and, usually,TI > TD.
4a. AssumingTI ≫ TD, calculate simple expressions forz+ andz−, and draw the corresponding Bode plot.
z± =1
2TD
[
1±√
1−4TD/TI
]
≈ 12TD
[
1± (1−2TD/TI)]
={ 1
TI,
1TD
}
The Bode plot ofDPID(s) is given below.(4a)
10−3
10−2
10−1
100
101
102
103
104
100
101
102
10−3
10−2
10−1
100
101
102
103
104
−100
−50
0
50
100
4b. If there is noise entering the system with veryhigh freqeuncy components, describe the problem with usingthis type of compensator.
High frequencies are amplified a lot in the loop due to the derivative compensation of the PID.
We would thus drive our actuators hard (burning them out) while chasing high frequency noise.(4b)
4c. How serious of a problem are delays when closing feedback loops? Use what you know about Pade expan-sions ofe−ds to explain clearly what the problem with delays is all about.
Delays are a significant problem when closing control loops.Interpreting the Laplace
transform e−ds of the delay functionδσ(t −d) using a Pade approximation, there are
poles in the LHP and zeros in the RHP. Recalling that the root locus goes from the open-loop poles
to the open-loop zeros, increasing the feedback gain too farcan thus lead to closed-loop instability.
(4c)
4d. Describe how you can tune three of the compensators developed in class in order to perform more deliberateloop shapingon the Bode plot than is possible with a PID compensator: which would you use where, and why?
0. Select the targetωc based on a rise time(ωc = 1.8/tr) or bandwidth (ωc = ωBW /1.4) constraint.
1. Apply lead compensationnear ωc to give adequate PM to meet the overshoot constraint.
2. Apply lag compensationwell belowωc to boost up low-freqeuncy gain to get good tracking.
3. Apply a low-pass filterwell aboveωc to provide adequate disturbance rejection.
Finally, selectK such that crossover actually occurs atωc.
(4d)