Lineare Dynamik mit Abaqus - pg.gda.planiem/dyd-zips/Lin-Dynamik.pdf · Freier Schwinger mit D...
33
Lineare Dynamik mit Abaqus A. Niemunis, C. Grandas, S. Chrisopoulos IBF-Karlsruhe Karlsruhe, 2014 ¨ Ubung zu komplexen Zahlen: zeigen i i = e -π/2
Transcript of Lineare Dynamik mit Abaqus - pg.gda.planiem/dyd-zips/Lin-Dynamik.pdf · Freier Schwinger mit D...

Lineare Dynamik mit Abaqus
A. Niemunis, C. Grandas, S. ChrisopoulosIBF-Karlsruhe
Karlsruhe, 2014
Ubung zu komplexen Zahlen: zeigen ii = e−π/2

Freier Schwinger ohne Dampfungm
k
x
u
(1)Gesucht u(t) aus der Gleichgewichtsgleichung Lineare GDG., konstante m, k + 2 AB notig.
mu + ku = 0 oder u + ω2nu = 0 mit ωn =
√k
m(1)
Mit dem Ansatz u(t) = Ceλt ergibt (1) algebraische Gl. λ2Ceλt + ω2nCeλt = 0
daher λ1,2 = ±iωn und damit u(t) = C1eiωnt + C2e
−iωnt (2)
Konstanten C1,C2 sind komplex. Aus AB: u(0) = u0 und u(0) = v0 folgt:
u0 = C1 + C2
v0/(iωn) = C1 − C2
d.h.C1,2 =
1
2(u0 + iv0/ω)
u(t) =1
2(u0 − iv0/ω)eiωnt +
1
2(u0 + iv0/ω)e−iωnt
Mit der trig. Darstellung eiωnt = cos(ωnt) + i sin(ωnt)
u(t) =1
2(u0 − iv0/ωn) [cos(ωnt) + i sin(ωnt)] +
1
2(u0 + iv0/ωn) [cos(ωnt)− i sin(ωnt)]
u(t) = u0 cos(ωnt) + v0/ωn sin(ωnt) (3)
Bei reellen AB ist die Losung u(t) reell und kein ”reeller Teil der Losung”

Freier Schwinger mit Dampfungm
k
cx
u
(2)Bewegungsgleichung mu + cu + ku = 0 umgewandelt zur kanonischen Form
u + 2ξωnu + ω2nu = 0 mit ωn =
√k
mund ξ =
c
2mωnckrit = 2mωn = 2
√mk
Das Dampfungsmaß ξ = Teil der krit. Dampfung, i.d.R. 1%− 10%, in der Geot. ξ = D = A/(4πγamplτampl)
Ansatz u(t) = Ceλt ergibt algebraische Gl. λ2Ceλt + λ2ξωnCeλt + ω2nCeλt = 0
daher λ1,2 = −ξωn ± ωn
√ξ2 − 1 und u(t) = C1e
(ωnξ+iωd )t + C2e(ωnξ−iωd )t (4)
Oszillation nur wenn iωd = ωn
√ξ2 − 1 wirklich imaginar ist, d.h. fur ξ2 < 1.
Mit reellen AB: u(0) = u0 und u(0) = v0 erhalt man die reelle Losung
u(t) = Ue−ξωnt cos(ωd t − θ) mit : (5)
gedampfte naturliche Frequenz ωd = ωn
√1− ξ2
Phasenverschiebung tan θ = (v0 + ξωnu0)/(ωdu0)
Amplitude U = u0
√1 +
(v0 + ξωnu0
ωdu0
)2

Freier Schwinger mit Dampfungm
k
cx
u
(3)
Mathematica Losung von u + 2ξωnu + ω2nu = 0 ergibt (4)
DSolve[u’’[t] + 2 x w u’[t] + w^2 u[t] == 0, u[t], t]
und u(t) = C1e(ωnξ+iωd )t + C2e
(ωnξ−iωd )t mit den AB: u(0) = u0 und u(0) = v0
L = C1 E^(t*(I wd - w x)) + C2 E^(t ( -I wd - w x)) ;
solu = Solve[(L/.t-> 0)== u0, (D[L,t]/. t-> 0)== v0,C1,C2]// Simplify
Ls = L /. solu[[1]]
ergibt die reelle Losung (5) in einer aquivalenten Form
u(t) = u0e−ξωnt
[cos(ωd t) +
(v0 + u0ωnξ
ωdu0
)sin(ωd t)
](6)
Eine aquivalente direkte Mathematica Losung ist auch moglich:
de = u’’[t] + 2 \[Xi] w u’[t] + w^2 u[t] == 0; IC1 = u[0] == u0; IC2 = u’[0] == v0;
DSolve[ de, IC1, IC2 , u[t], t] // FullSimplify

Schwinger mit harmon. Belastungm
k
cx
u
p cosΩt
(4)Bewegungsgleichung wird durch die Belastung p cos Ωt inhomogen:
mu + cu + ku = p cos Ωt (7)
Die homogene Losung (4) muss durch eine partikulare Losung (erzwungene
Schwingung) erweitert werden: u(t) + up(t). Der Ansatz up(t) = ZeiΩt mit einerkomplexen Amplitude Z = Ue−iθ ergibt up = iZΩeiΩt , up = −Ω2ZeiΩt und
−mΩ2ZeiΩt + ciΩZeiΩt + kZeiΩt = peiΩt oder −mΩ2Z + cΩiZ + kZ = p (8)
mit ausgeklammertem eiΩt 6= 0.
Fur Belastung aus mehreren Harmonischen∫p(Ω) cos(Ωt)dΩ ist (8)-rechts
eine Schwingungsgleichung in der Frequenzdomane. Die p(Ω) Beitrage konnenunterschiedliche Phasen ψ haben also p = Pe−iψ ist i.Allg. komplex.
Gl. (8)-rechts wird abgekurzt als
αZ = p mit α = (k −mΩ2) + cΩi oder α = m(ω2n − Ω2 + 2iΩξωn) (9)
wobei ω2n = k/m und 2ξωn = c/m

Schwinger mit harmon. Belastungm
k
cx
u
p cosΩt
(4)
Z = p/α findet man aus ( Division komplexer Zahlen z1/z2 = z1 z2/|z2|2 und |z| =√zz )
Z = pα/|α|2 mit α = (k −mΩ2)− cΩi und |α|2 = (k −mΩ2)2 + (cΩ)2 (10)
Der Betrag |Ue−iθ| = U = |Z | der Amplitude ( Aus |z| =√zz und z1z2 = z1 z2 )
U =|p||α| =
|p|√(k −mΩ2)2 + (cΩ)2
=|p|
m√
(ω2n − Ω2)2 + (2Ωξωn)2
(11)
Die Phase θ finden wir aus
Z = Ue−iθ =pα
|α|2 d.h. aus θ = − arg(pα) (12)
Im Sonderfall p ∈ R gilt mit θ = − arg(α), d.h.
tan θ = − Im(α)
Re(α)=
cΩ
k −mΩ2=
2Ωξωn
ω2n − Ω2

Schwinger mit harmon. Belastungm
k
cx
u
p cosΩt
(5)
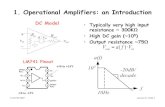
Die Amplitude U der partikularen Losung up(t) wird graphisch in Abhangigkeitvom Frequenzverhaltnis r = Ω/ωn und mit der statischen AmplitudeU0 = |p|/k normiert. Unsere Losung hat die Formtan θ =
2ξr
1− r 2mit ξ = c/(2mωn)
U = Ds(r)U0 mit Ds =[(1− r 2)2 + (2ξr)2
]−1/2(13)
Der Vergroßerungsfaktor Ds wird geplottet :
x
0.1 0.2 0.5 1.0 2.0 5.0 10.0
1
10
100
1000
Animate[
LogLogPlot[((1-r^2)^2 +(2 x r)^2)^(-1/2),r,0.1,10,
PlotRange -> 0.1, 1000], x, 0.0001, 0.99,
AnimationRunning -> False]
Log-Log Bode Plot

Schwinger mit Erregung am Auflager
m
k
cx
u
u U cosΩtbb = (6)
Der Anhangspunkt bewegt sich harmonisch: ub(t) = Ub cos(Ωt) d.h.ub(t) = Ube
iΩt(anstatt von peiΩt ). Die Gleichgewichtsgleichung ist
mu + c(u − ub) + k(u − ub) = 0 oder (14)
mu + cu + ku = cub + kub (15)
Die partikulare Losung findet man mit gleichem Ansatz wie bei der Kraft peiΩt
d.h. ZeiΩt mit der komplexen Amplitude Z = Ue−iθ:
−mΩ2ZeiΩt + ciΩZeiΩt + kZeiΩt = (ciΩ + k)UbeiΩt
−mΩ2Z + ciΩZ + kZ = (ciΩ + k)Ub
abgekurzt zu αZ = βUb. Ein Vergleich der Betrage αZαZ = ββU2b fuhrt zu
ZZ
U2b
=ββ
ααoder
U2
U2b
=(cΩ)2 + k2
(k −mΩ2)2 + (cΩ)2=
(2ξr)2 + 1
(1− r 2)2 + (2ξr)2
Aus Ue−iθ = Z = βUb/α = αβUb/|α|2 folgt tan θ = − Im(αβ)
Re(αβ)mit
α = k −mΩ2 − ciΩ und β = ciΩ + k

Schwinger mit Erregung am Auflager
m
k
cx
u
u U cosΩtbb = (7)Vergroßerungsfaktor
Db(r) =U
Ub=
[(2ξr)2 + 1
(1− r 2)2 + (2ξr)2
]1/2
wird geplottet zusammen mit Ds(r):
x
0.1 0.2 0.5 1.0 2.0 5.0 10.0
1
10
100
1000
x
0.1 0.2 0.5 1.0 2.0 5.0 10.0
1
10
100
1000
Log-LogBode Plot
Animate[
LogLogPlot[ ((1-r^2)^2 +(2 x r)^2)^(-1/2),
( (2 x r)^2 + 1)^1/2* ((1-r^2)^2 +(2 x r)^2)^(-1/2),
r,0.1,10,
PlotRange -> 0.1, 1000], x, 0.0001, 0.99,
AnimationRunning -> False]

Mehrere Freiheitsgrade
mm 31
1
1
k
cm2
2
2
k
c
u u13u2
p cosΩt p cosΩt2 3p cosΩt1
c
k
(8)
Element-Krafte (auf Massen 1, 2)
Feder F k1 = ku2 − ku1 = −F k
2
Dampfer F c1 = cu2 − cu1 = −F c
2
Direkte Krafte auf Masse i
Tragheit Fmi = −mi ui
Feder Fmi = kui
Dampfer F ci = c u2
Gleichgewichtbedingungen−(Fm
i +∑
F ci +∑
F ki ) = pi :
m1u1 + c1u1 − c2u2 + k1u1 − k2u2 = p1
m2u2 − c1u1 + c2u2 − k1u1 + k2u2 = p2
. . .
Kel =[
k −k−k k
]Cel =
[c −c−c c
]Mel =
[m 00 m
](16)
Beachte zwei Arten von Feder und zwei Arten von Dampfer.

Mehrere Freiheitsgradem1
k
cm2
2
2
k
cx
u u12
p cosΩt
p cosΩt
2
1
(8b)
Die globalen Matrizen sind
K =
k −k 0 0 . . .−k 2k −k 0 . . .
0 −k 2k + k −k . . .
. . .
C =
c −c 0 0 . . .−c 2c −c 0 . . .
0 −c 2c + c −c . . .
. . .
M =
m 0 0 0 . . .0 m −0 0 . . .0 0 m 0 . . .
. . .
Das zusammengesetzte Gleichungssystem
M · u + C · u + K · u = p (17)
wird entkoppelt. Dafur werden zunachst die sog. Bewegungsmoden φα aus derfreien und ungedampften Schwingung
M · u + K · u = 0 mit u = Ueiωt (18)
und mit komplexer Amplituden U = U0eiθ gefunden.

Mehrere Freiheitsgradem1
k
cm2
2
2
k
cx
u u12
p cosΩt
p cosΩt
2
1
(9)
Eigenvektoren Uα der undedampften freien Schwingung sind
K · U = ω2M · U oder[M−1 ·K− ω2 1
]· U = 0 (verallgemeinertes) Eigenvertproblem
Das Eigensystem vom unsymmetrischen Produkt (M−1·K) ist reell u.Eigenwerte positiv, weil K und M positiv definit und symmetrisch sind!Eigenvektoren U sind nicht orthogonal: fur α 6= β gilt UαT · Uβ 6= 0, aber:
UαT ·M · Uβ = 0 und UαT ·K · Uβ = 0 fur α 6= β (19)
Mit den normierten Eigenvektoren = Moden φαdf= Uα/
√UαT ·M · Uα hat die
M−Orthogonalitat und K−Orthogonalitat die Form:
φαT ·M · φβ = δαβ und φαT ·K · φβ = δαβω2α (keine Summe uber α )
Wir definieren auch die modale Matrix Φ mit Moden φβ in Zeilen.

Drei Herleitungenm1
k
cm2
2
2
k
cx
u u12
p cosΩt
p cosΩt
2
1
(9)
Das Eigensystem von (M−1·K) ist reell, wenn K und M positiv definit undsymmetrisch sind, weil mit der Cholesky Zerlegung gilt:
M = L · LT ⇒ K · u = λL · LT · u ⇒ L−1 · K · u = λLT · u ⇒[L−1 · K · L−T ] · y = λy , wobei y = (LT · u).Die Losung ist reell dank der Symmetrie von [L−1 ·K ·L−T ] (u. positiv wenn K positiv)
Gl. (19) gilt fur zwei beliebige Eigenvektoren Uα, Uβ , α 6= β mit Eigenwertenλα 6= λβ und mit symmetrischen M,K, weil
K ·Uα= λαM ·Uα
K ·Uβ= λβM ·Uβ
⇒
Uβ ·K ·Uα= λαUβ ·M ·Uα
Uα ·K ·Uβ= λβUα ·M ·Uβ
⇒a = λαb
a = λβb
⇒ a = b = 0
φαT ·K · φβ = δαβω2α gilt fur α 6= β aufgrund von (19). Fur α = β gilt
K · Uα = ω2αM · Uα ⇒ UαT ·K · Uα = ω2
αUαT ·M · Uα ⇒ φαT ·K · φα = ω2α

Entkopplung der Eigenmodenm1
k
cm2
2
2
k
cx
u u12
p cosΩt
p cosΩt
2
1
(10)
Nun wird die ursprungliche Gleichung M · u + C · u + K · u = p mit
u(t) = Ueiωt =∑α
φαηα(t) = ΦT · η
ausgedruckt, wobei die Koeffizienten ηα(t) bei Moden φα die neuenUnbekannten sind. Nach dem Vormultiplizieren mit Φ erhalten wir dasentkoppelte System
Φ ·M ·ΦT · η + Φ · C ·ΦT · η + Φ ·K ·ΦT · η = Φ · p (20)
oder M∗ · η + C∗ · η + K∗ · η = p∗, (21)
weilM∗ = Φ ·M ·ΦT = diag(1, 1, . . . ) und K∗ = Φ ·K ·ΦT = diag(ω2
1 , ω22 , . . . )
diagonal sind. Mit der Annahme C = c1M + c2K (sog. Rayleigh Dampfung) istauch C∗ = Φ · C ·ΦT diagonal. Die Belastung ist p∗ = Φ · pDie Umwandlung η(t) = Φ−T · u(t) und t∗ = Φ · t · ΦT wird als die sog. ”subspace projektion” bezeichnet.

Nach der Entkopplungm1
k
cm2
2
2
k
cx
u u12
p cosΩt
p cosΩt
2
1
(11)
Die Zeilen von (21) d.h. M∗ · η + C∗ · η + K∗ · η = p∗ sind mit diagonalenM∗,C∗ und K∗ entkoppelt. Jede Zeile α ist eine skalare DG
1ηα(t) + 2ξαωαηα(t) + ω2αηα(t) = p∗α(t) mit (22)
mit 2ξα = c1/ωα + c2ωα aus C = c1M + c2K (23)
Harmonische Belastungen pβ = Pβei(Ωt+θβ ) mit gleicher Kreisfrequenz Ω und
unterschiedlichen Phasen θβ projizieren wir als
p∗α =∑β
Φαβpβei(Ωt+θβ ) = P∗αe
iΩt mit komplexen Amplit. P∗α =∑β
Φαβpβeiθβ
Die AB fur η(t) in (21) findet man aus der Projektion η(0) = Φ−T · u0 undη(0) = Φ−T · u0. Eine Inversion von Φ ist einfach Φ−1 = M · ΦT .
Die modalen Losungen in Abaqus R© :fur nicht harmonisches p = Modal dynamic analysisfur harmonisches p = Steady-state linear dynamic analysis

Mehrere Freiheitsgrade Bsp.m1
k
cm2
2
2
k
cx
u u12
p cosΩt
p cosΩt
2
1
(12)
Die konventionelle Steifigkeit∗, Massenmatrix und Rayleigh Dampfung:
Ltot = 10.0; Emod = 1000.0; r = 2; A = 1; c1 = 0.01; c2 = 0.01;
nelem = 140; Lelem = Ltot/nelem; nnode = nelem + 1;
u0 = Array[0 &, nnode]; v0 = Array[0 &, nnode];
Kelem = (Emod A/Lelem) 1, -1, -1, 1;
Melem = (r A Lelem/2) 1, 0, 0, 1;
Mglob = Array[0 &, nnode, nnode];
Kglob = Array[0 &, nnode, nnode];
Do[Mglob[[i ;; i + 1, i ;; i + 1]] += Melem;
Kglob[[i ;; i + 1, i ;; i + 1]] += Kelem;, i, 1, nelem];
Kglob[[1, 1]] = (Emod A/Lelem)*10^6; (* FIXED node *)
Cglob = c1 Mglob + c2 Kglob (* Rayleigh DAMPING *);
Bezeichnungen:
P,Pt,Pit,W,p,Kglob,Mglob=
= Φ,ΦT ,Φ−T ,Ω, p,K,M
Modale Zerlegung (Diagonalisierung, ”subspace projection”):
Uglobtilde = Eigenvectors[Inverse[Mglob].Kglob] // N;(*eigenvectors in rows*)
P = Table[Uglobtilde[[i]]/Sqrt[Uglobtilde[[i]].Mglob.Uglobtilde[[i]]], i,1,nnode]// N // Chop;
Pt = Transpose[P]; Pit = P.Mglob // Chop;
MglobStar= P.Mglob.Pt//N//Chop; CglobStar= P.Cglob.Pt//N//Chop; KglobStar= P.Kglob.Pt//N//Chop;
W= 2*2*Pi; p = Array[0 &, nnode]; p[[nnode]] = 10 Sin[W t]; pStar = P.p;
∗Steifigkeit modifiziert fur die Einspannung RB am Knoten Nr 1

Mehrere Freiheitsgrade Bsp.m1
k
cm2
2
2
k
cx
u u12
p cosΩt
p cosΩt
2
1
(13)Modale AB und analytische Losungen (einzeln) der entkoppelten Gleichungen:nsol = Array[0 &, nnode]; n0 = (Pit.u0); dn0 = (Pit.v0);
Do[
eq = MglobStar[[i,i]]*n’’[t]+CglobStar[[i,i]]*n’[t]+ KglobStar[[i,i]]*n[t]- pStar[[i]]==0;
IC1 = n[0] == n0[[i]]; IC2 = n’[0] == dn0[[i]];
nsol[[i]] = n[t] /. DSolve[eq, IC1, IC2, n[t], t][[1]],
i, 1, nnode]
Frames = Table[Pt.(nsol /. t -> i/100) // Chop, i, 0, 1000];
Animate[ListPlot[Frames[[i,All]],Joined -> True,PlotRange ->-0.1,0.1/3, AxesLabel->"x","u"],
i,0,1000,1]
i
10 20 30 40x
-0.03
-0.02
-0.01
0.01
0.02
0.03
u
Bezeichnungen:
nsol, P, Pit, u0, v0 = η(t), u(t), u(t)

Modal dynamic analysis (p nicht harmonisch) (14)Entkoppelte Gleichungen mit nicht harmonischer Belastung p∗(t)
1ηα(t) + 2ξαωαηα(t) + ω2αηα(t) = p∗α(t) mit 2ξα = c1/ωα + c2ωα (24)
konnen in kleinen Zeit-Inkrementen ∆t = t1 − t0 integriert werden mit AB:η(t0) , η(t0) und angenommen eine lineare Anderung von p∗α(t)
p∗α(t) = p∗α(t0) + ∆p∗α (t − t0)/∆t (25)
Aus jede Zeile α in (24) wird ein Gleichungspaar gebildet ηα(t1)
ηα(t1)
=
a11 a12
a21 a22
· ηα(t0)
ηα(t0)
+
b11 b12
b21 b22
· p∗α(t0)
p∗α(t1)
(26)
Die Koeffizienten aij , bij findet man aus dem Mathematica Skript.
DE1 = ed’[t] + 2 x w ed[t] + w^2 e[t] == p0 + (p1 - p0) (t-t0)/dt; DE2 = ed[t] == e’[t];
IC1 = e[t0] == e0; IC2 = ed[t0] == ed0;
solu = DSolve[DE1,DE2,IC1,IC2 , e[t], ed[t], t ] // Simplify ;
es, eds = ( e[t], ed[t] //. solu[[1]] ) /. Sqrt[w^2 (- 1 + x^2)] -> I wd ;
es1, eds1 = es, eds * Sqrt[w^2 (-1 + x^2)] / (I wd) // FullSimplify ;
eq1 = Coefficient[es1- a11 *e0 - a12 ed0 - b11 p0 - b12 p1, e0,ed0,p0,p1]==0,0,0,0;
eq2 = Coefficient[eds1- a21 *e0 - a22 ed0 - b21 p0 - b22 p1, e0,ed0,p0,p1]==0,0,0,0;
sol1 = Solve[eq1, a11, a12, b11, b12] // FullSimplify
sol2 = Solve[eq2, a21, a22, b21, b22] // FullSimplify
Bezeichnungen: e[t], ed[t], x, w, wd = η(t), η(t), ξ, ω, ωd = ω√
1− ξ2

p∗ nicht harmonisch (14a)
Mit Bezeichnungen: ω = ωα, ξ = ξα d = ∆t, ωd = ω√
1− ξ2 und erhalten wir aij und bij in der Form
a11 =e−dωξ(ωξ sin(dωd ) + ωd cos(dωd ))
ωd
a12 =e−dωξ sin(dωd )
ωd
a21 = −ω2e−dωξ sin(dωd )
ωd
a22 =e−dωξ(ωd cos(dωd )− ωξ sin(dωd ))
ωd
b11 =e−dωξ
(−ω
(dωξ + 2ξ2 − 1
)sin(dωd ) + 2ωdξe
dωξ − ωd (dω + 2ξ) cos(dωd ))
dω3ωd
b12 =e−dωξ
(ω(
2ξ2 − 1)
sin(dωd ) + ωd
(−edωξ
)(2ξ − dω) + 2ωdξ cos(dωd )
)dω3ωd
b21 =e−dωξ
(ωd
(−edωξ
)+ ω(dω + ξ) sin(dωd ) + ωd cos(dωd )
)dω2ωd
b22 =e−dωξ
(ωd e
dωξ − ωξ sin(dωd )− ωd cos(dωd ))
dω2ωd

Direkte Methode (steady-state) (16)
Die homogene (ohne Belastung) Losung der diskreten Bilanzgl. (17) mit AB:u(0) = 0 und u(0) = 0 ware u ≡ 0 (keine Eigenschwingung)∗. Wir sucheneine partikulare (erzwungene) Losung von
M · u + C · u + K · u = PeiΩt in der Form u = UeiΩt (27)
Die phys. Belastung der reelle Teil∗∗ der komplexen Belastung PeiΩt ist, wobeiPβ = Pβ0e
iθβ und θβ ,Pβ0 ∈ R. Die AB sind fur die partikulare Losung nichtnotig.Faktor eiΩt kann in (27) ausgeklammert werden[−Ω2M + iΩC + K
]·U = P ⇒ U =
[−Ω2M + iΩC + K
]−1
· P (28)
erfolgt mit einem Solver fur komplexe Gleichunssysteme.Die Losung (=Amplituden) Uβ = Uβ0e
iθβ ist zeitunabhangig und komplex.
*Mit anderen AB muss M · u + C · u + K · u = 0 gelost werden und die erhaltene homogene Losung wird zur
partikularen Losung addiert. Die durch p eingefuhrte Energie wird aber keine Eigenschwingung anfachen! Die
partikulare Losung entspricht schon dem angefachtem Zustand (deshalb ”steady-state”).
**Deshalb ist die phys. Losung nur der reelle Teil der komplexen Losung d.h up(t) = Re(Uβeiωt ) mit Uβ ∈ C

Direkte Methode (17)
Die Matrix[−Ω2M + iΩC + K
]in (28) wird als dynamische Steifigkeit (oder
komplexe Impedanz) bezeichnet und hangt wesentlich von der Kreisfrequenz Ωder Belastung ab!Aus der komplexen Losung
Uβ = Uβ0eiθβ fur β = 1, 2, . . . (29)
kann man sowohl die einzelnen Amplituden Uβ0 = |Uβ | als auch ihre Phasentan(θβ) = arg(Uβ) bestimmen. Die physikalische Bewegungsgleichung desFreiheitsgrades β ist der reelle Teil
upβ(t) = Uβ0 cos(Ωt + θβ), (30)
weil wir die physikalische Belastung als der reelle Teil von PeiΩt definiert haben.

Mehrere Freiheitsgrade Bsp.m1
k
cm2
2
2
k
cx
u u12
p cosΩt
p cosΩt
2
1
(18)Die Berechnung der konventionellen Steifigkeit Massenmatrix und RayleighDampfung bleibt unverandert. Statt der modalen Zerlegung und deranalytischen Losung der entkoppelten Gleichungen verwenden wir
die direkte Methode (fur ”steady state”)
Ltot = 10.0; Emod = 1000.0; r = 2; A = 1; c1 = 0.01; c2 = 0.01;
nelem = 140; Lelem = Ltot/nelem; nnode = nelem + 1;
u0 = Array[0 &, nnode]; v0 = Array[0 &, nnode];
Kelem = (Emod A/Lelem) 1, -1, -1, 1;
Melem = (r A Lelem/2) 1, 0, 0, 1;
Mglob = Array[0 &, nnode, nnode];
Kglob = Array[0 &, nnode, nnode];
Do[Mglob[[i ;; i + 1, i ;; i + 1]] += Melem;
Kglob[[i ;; i + 1, i ;; i + 1]] += Kelem;, i, 1, nelem];
Kglob[[1, 1]] = (Emod A/Lelem)*10^6; (* Fixed node *)
Cglob = c1 Mglob + c2 Kglob (*Rayleigh damping*);
W = 4*Pi; pAmpl = Array[0 &, nnode]; pAmpl[[nnode]] = 10 + 0*I ;
usolu = Inverse[- W^2 Mglob + I W Cglob + Kglob ] . pAmpl ;
uAmpls = Abs[usolu] ;
thetas = Arg[ usolu ] ;
Animate[ListPlot[uAmpls*Cos[W*t+thetas],
Joined->True,PlotRange->-0.1,0.1/3,AxesLabel->"x","u"] ,t,0,10]

Mehrere Freiheitsgrade Bsp.m1
k
cm2
2
2
k
cx
u u12
p cosΩt
p cosΩt
2
1
(19)
Out[36]=
t
10 20 30 40x
-0.03
-0.02
-0.01
0.01
0.02
0.03
u
Out[36]=
t
10 20 30 40x
-0.03
-0.02
-0.01
0.01
0.02
0.03
u
Die eingefuhrte Energie ist W =∫ T
0Re(p)Re(u)dt und nicht
∫ T0 pudt mit p, u ∈ C
Ohne Dampfung gilt W = 0.
An0 = usolu[[nnode]] ; Pa = pAmpl[[nnode]] ;
dW = Refine[Abs[An0]*D[Cos[Arg[An0]+ W t ],t]* Abs[Pa]Cos[ Arg[Pa] + W t ], t \[Element] Reals ]
NIntegrate[dW, t, 0, 2 Pi/W]
Bei einer modalen Losung (mit Dampfung) stellt sich die ”steady state”Losung nach einer Ubergangszeit asymptotisch ein.

FD -Losung von u,tt = c2u,xx mit v = u, ε = u,x (20)
FD= finite Differenzen, CTCS = Zentrale Ortsableitung u. Zentrale Zeitableitung
PDG:ε,t = v,x weil u,xt = u,tx
v,t = c2ε,x
RB: v = v ;. ε = ε;. v = −cε
c =
√E
ρ
t,x (xj , tn) =1
2∆x
[t(xj+1, tn)− t(xj−1, tn)
]t(xj , tn) =
t(xj , tn+1)− t(xj , tn−1)
2∆t
ε(xj , tn+1) = ε(xj , tn−1) +2∆t
2∆x
[v(xj+1, tn)− v(xj−1, tn)
]v(xj , tn+1) = v(xj , tn−1) +
2c2∆t
2∆x
[ε(xj+1, tn)− ε(xj−1, tn)
]
tn
= ?
xj

RB von Lysmer (1969)
ηE
n=1x
uε
ε > 0
n u>0
(21)
Drei Typen der RB fur die Wellengleichung u = c2u,xx mit x ∈ [0, L]:
• fixed : v(x , t) = 0 also auch u =∫vdt = 0
• free : ε(x , t) = 0 also auch σ = Eε = 0
• Lysmer : v(x , t) = −cε(x , t).
Gl. u = c2u,xx hat die allg. d’Alambert Losung u(x , t) = fL(x + ct) + fR(x − ct)
weil u = c2 [f ′′L + f ′′R]
und u,xx = f ′′L + f ′′R mit f ′ = df (t)/dt (31)fL + fR ist allgemein, d.h. kann an beliebige AB angepasst werden : fL + fR = u; c(f ′L + f ′R ) = u fur t = 0
Die Welle fL(x + ct) lauft nach links und fR(x − ct) - nach rechts.Die Dampfer-Bettung ηu bei x = L ergibt mit n = 1 den Spannungsvektor
nEε− ηu ≡ 0 oder nE(f ′L + f ′R)− ηc(f ′L − f ′R) ≡ 0 oder (32)
[nE − ηc] f ′L + [nE + ηc] f ′R ≡ 0 (33)
Wahlt man nE + ηc = 0 dann nE − ηc 6= 0 und (33) erzwingen f ′L ≡ 0, d.h. dieWelle fL(x + ct) wird verhindert. Aus nEε− ηu ≡ 0 mit nE + ηc = 0 folgt
cε+ u ≡ 0 wie in der RB Lysmer (34)

Absorbierende RB rechts, FD-Beispiel (22)omega = 4*Pi; amplitudeU = 0.2; c = 10; c2=c*c;
nmax = 320; dt = 0.01; jmax = 100; dx = 0.2;
e = Table[0, j,1,jmax, n,1,nmax];
v=Table[0,j,1,jmax,n,1,nmax];
u = Table[0, j,1,jmax, n,1,nmax] ;
imposeICe := e[[All, 1]] = 0 ; imposeICv := v[[All, 1]] = 0 ;
imposeBCv0 := Do[v[[1,n]]=If[n*dt< 2*Pi/omega,
amplitudeU*omega*Sin[omega*dt*n],0]//N,n,1,nmax];
imposeBC[where_, method_] := Module[,
If[method== "fixed", v[[where, All]]=0 ];
If[method== "free", e[[where, All]]=0 ];
If[method== "Lysmer", v[[where, All]]=-c*e[[where,All]] ];
]
getCentralXderivatives[f_, n_]:= Module[der=Array[0&,jmax],
der[[1]] = (f[[2, n ]] - f[[1, n ]])/dx;
der[[jmax]] = (f[[jmax, n]] - f[[jmax - 1, n]])/dx;
Do[ der[[j]]= (f[[j+1, n]]- f[[j-1,n]])/(2*dx),j,2,jmax-1];
der ];
imposeICe; imposeICv;
derv = getCentralXderivatives[v, 1]; dere = getCentralXderivatives[e, 1];
e[[All, 2]] = e[[All,1]]+ dt*derv ; v[[All, 2]]= v[[All,1]]+ dt*c2*dere ;
imposeBCv0; imposeBC[jmax, "Lysmer"];
Do[derv = getCentralXderivatives[v,n+1];
dere = getCentralXderivatives[e,n+1];
e[[All,n+2]] = e[[All,n]] + 2*dt*derv;
v[[All,n+2]] = v[[All,n]] + 2*dt*c2*dere;
imposeBCv0; imposeBC[jmax, "Lysmer"];, n,1,nmax-2];
u[[All,1]]=0;
Do[u[[All,n]]=u[[All,n-1]]+0.5*(v[[All,n-1]]+v[[All,n]])*dt,n,2,nmax]
Animate[ListPlot[u[[All, n]],Joined ->True,PlotRange->-1,1],n,0,nmax,1]
.
Out[48]=
n
20 40 60 80 100
-0.2
-0.1
0.1
0.2
0.3
0.4
0.5
.
Out[48]=
n
20 40 60 80 100
-0.2
-0.1
0.1
0.2
0.3
0.4
0.5
.
Out[48]=
n
20 40 60 80 100
-0.2
-0.1
0.1
0.2
0.3
0.4
0.5
.
Out[48]=
n
20 40 60 80 100
-0.2
-0.1
0.1
0.2
0.3
0.4
0.5

Absorbierende RB links, Direkte Methode (22)
Eine Dampfer-Bettung ηu bei x = 0 mit n = −1 ergibtden Spannungsvektor nEε− ηu ≡ 0 d.h.
[nE − ηc] f ′L + [nE + ηc] f ′R ≡ 0 (35)
nE − ηc = 0 und (35) erzwingen f ′R ≡ 0. Die WellefR(x + ct) nach rechts wird verhindert und cε = v
Ltot = 10.0; Emod = 1000.0; r = 2; A = 1; c1 = 0.01; c2 = 0.05;
nelem = 140; Lelem = Ltot/nelem; nnode = nelem + 1;
u0 = Array[0 &, nnode]; v0 = Array[0 &, nnode];
Kelem = (Emod A/Lelem) 1, -1, -1, 1;
Melem = (r A Lelem/2) 1, 0, 0, 1;
Mglob = Array[0 &, nnode, nnode];
Kglob = Array[0 &, nnode, nnode];
Do[Mglob[[i ;; i + 1, i ;; i + 1]] += Melem;
Kglob[[i ;; i + 1, i ;; i + 1]] += Kelem;, i, 1, nelem];
(* node No 1 not fixed anymore *)
Cglob = c1 Mglob + c2 Kglob (*Rayleigh damping*);
Cglob[[1,1]] += Emod/Sqrt[Emod/ r]; (* LYSMER damping at node 1 *)
W = 4*Pi; pAmpl = Array[0&, nnode]; pAmpl[[nnode]]= 10+0*I;
usolu = Inverse[-W^2 Mglob+ I W Cglob + Kglob].pAmpl;
uAmpls = Abs[usolu]; thetas = Arg[usolu];
Animate[ListPlot[uAmpls*Cos[W*t+thetas],
Joined->True,PlotRange->-0.1,0.1/3,AxesLabel->"x","u"],t,0,10]
.
Out[140]=
t
20 40 60 80 100 120 140x
-0.015
-0.010
-0.005
0.005
0.010
0.015
u
.
Out[140]=
t
20 40 60 80 100 120 140x
-0.015
-0.010
-0.005
0.005
0.010
0.015
u
.
Out[140]=
t
20 40 60 80 100 120 140x
-0.015
-0.010
-0.005
0.005
0.010
0.015
u
.
Out[140]=
t
20 40 60 80 100 120 140x
-0.015
-0.010
-0.005
0.005
0.010
0.015
u

Kontinuum (23)
.
−σA + (σ + σ,xdx)A− kudx − ηudx − ρAudx = 0 (36)
AEu,xx = ρAu + ku + ηu (37)
u,xx =1
c2u + κ2u +
2ξ
cu mit (38)
c2 =E
ρκ2 =
k
AEξ =
ηc
2AE(39)
AB: u(x , 0) = u0() u(x , 0) = v0(x) (40)
RB: BL(u(t, 0)) = 0 BR(u(t, L)) = 0 (41)
Ansatz fur freie harmonische Welle u(x , t) = Ue−ikx+iωt

Kontinuum (23)
Der Ansatz fur freie harmonische Welle u(x , t) = Ue−i(kx−ωt) mit:ω = 2π/T = Kreisfrequenz (T = Periode ) undk = ±2π/λ = Wellenzahl (λ = Wellenlange)ist eine d’Alambert’sche Losung u(x , t) = f (x ∓ ct) = Ue−i(x∓ct), wobeic = λ/T = ω/|k| den Betrag der Wellengeschwindigkeit bezeichnet.
0 = −u,xx +1
c2u + κ2u +
2ξ
cu mit u(x , t) = Ue−i(kx−ωt) (42)
0 =
[k2 − ω2
c2+ κ2 + iω
2ξ
c
]Ue−i(kx−ωt) (43)
Dispersionsgleichung (Frequenzdomane) k = ±√ω2/c2 − κ2 + iω2ξ/c
oder k = ± 4
√ω4
c4− 2ω2 (κ2 − 2ξ2)
c2+ κ4 e
−i 12
tan−1(
2cξω
c2κ2−ω2
)(44)
Formell k = ±(kR + ikI ) erhalten wir die Losung
u(x , t) = Ue−i[(kR+ikI )x−ωt] + Ue−i[−(kR+ikI )x−ωt] (45)
u(x , t) = Ue−kI xe−i[kR x−ωt] + UekI xe−i[−kR x−ωt] (46)

Kontinuum (23)In Mathematica mit dem Aufruf allReal[] wird angenommen, dass alle bisherbenutzte Symbole (auf der Rechten Seite) reell sind:
listQ[x_] := Length[x] > 0;
noReal[ ] := Module[, $Assumptions=True; Print[ $Assumptions]; ];
thisReal[ x_?AtomQ ] := Module[, $Assumptions = $Assumptions && x \[Element] Reals ;
Print[ $Assumptions]; ];
thisReal[ thisList_?listQ ] :=
Module[, $Assumptions = $Assumptions && ( And @@ (# \[Element] Reals & /@ thisList ) );
Print[ $Assumptions]; ];
allReal[] := Module[ ,
$Assumptions= And @@ (# \[Element] Reals & /@ (Select[ToExpression[Names["Global‘*"]],AtomQ[#]&]));
Print[ $Assumptions ] ; ];
myAbs[ a_ ] := Sqrt[ (Conjugate[a] // FullSimplify ) * a ] // FullSimplify ;
myArg[a_ ] := ArcTan[ (Im[a] // ComplexExpand ) / (Re[a] // ComplexExpand ) ] // FullSimplify ;
toExpo[a_] := myAbs[a] * Exp[ I myArg[a] // Simplify ] ;
k2 = ( \[Omega]^2 / c^2 - \[Kappa]^2 + I \[Omega] 2 \[Xi] /c );
allReal[]; toExpo[k2]
Eine Klasse der RB:
RB:u(0, t) = u0eiωt und σ(0, t) = Eu,x(L, t) = F (t)/A oder u,x = f (t) (47)
mit dem Faltungsintegral
u,x(L, t) = −∫ t
−∞G(t − τ)u(L, τ)dτ (48)

Kontinuum (23)Die ”Steady state” Losungsansatz u(x , t) = Ueiωt hat die AmplitudeU(x) = Aeiθ mit A(x) und θ(x) substituieren wir in die Bilanzgleichung
0 = u,xx −1
c2u − κ2u − 2ξ
cu (49)
Wir erhalten das folgende RWP
0 = U,xx +ω2
c2U − κ2U − iω
2ξ
cU (50)
mit RB: U(0) = U undU,x(L) + g(ω)U(L) = 0 mit g(ω) = F [G(t)]
Der Losungsansatz U(x) = A(ω)eikx fuhrt zu
U(x) = A1(ω)e−ikx + A2(ω)eikx =U
1 + q(ω)
[e−ikx + q(ω)(ω)eikx
](51)
wobei
q(ω) =ik(ω)− g(ω)
ik(ω) + g(ω)e−2ikL (52)

Kontinuum (23)

Kontinuum (23)