Validation of the frequency modulation technique applied ...
Upload
shanon-barkerCategory
view
217download
1
Lecture 7 – Frequency Content of P, R, W, and V
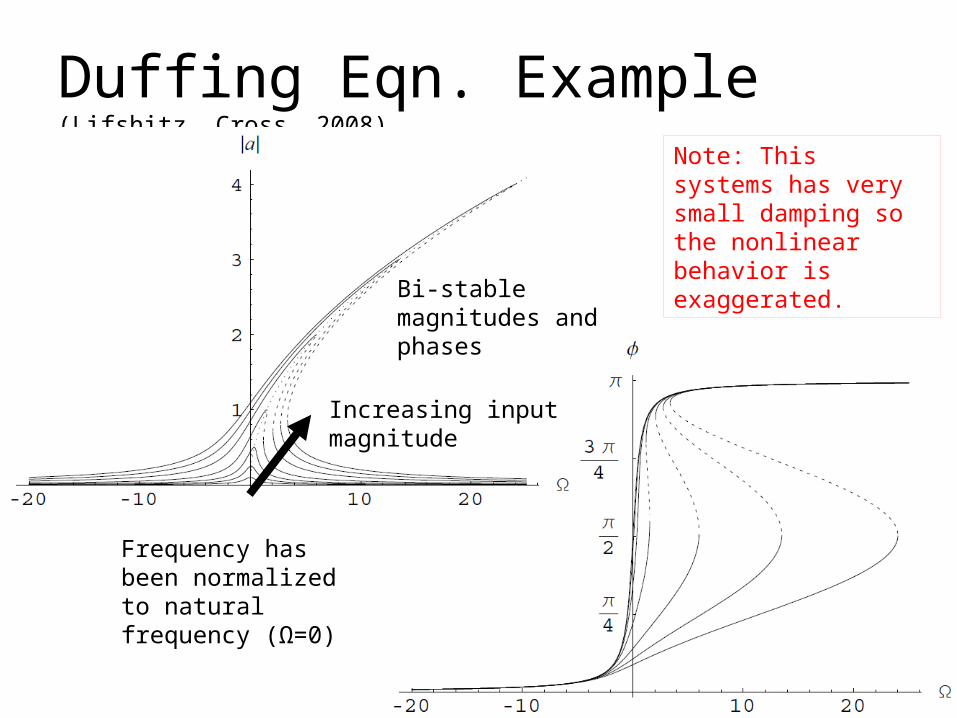
Duffing Eqn. Example (Lifshitz, Cross, 2008)
Frequency has been normalized to natural frequency (Ω=0)
Increasing input magnitude
Bi-stable magnitudes and phases
Note: This systems has very small damping so the nonlinear behavior is exaggerated.
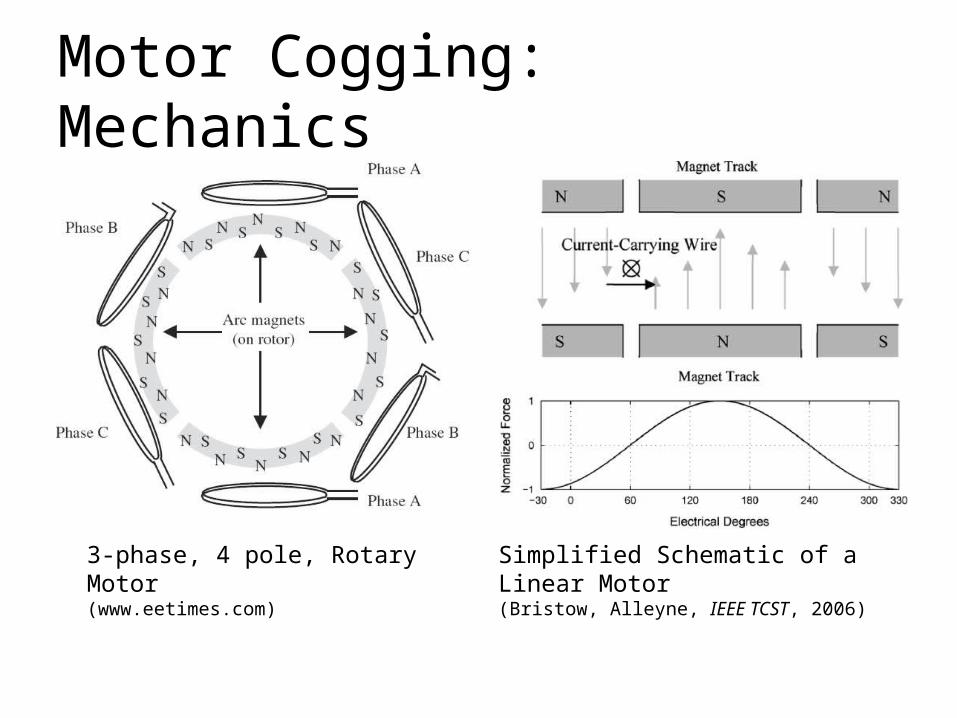
Motor Cogging: Mechanics
3-phase, 4 pole, Rotary Motor(www.eetimes.com)
Simplified Schematic of a Linear Motor(Bristow, Alleyne, IEEE TCST, 2006)
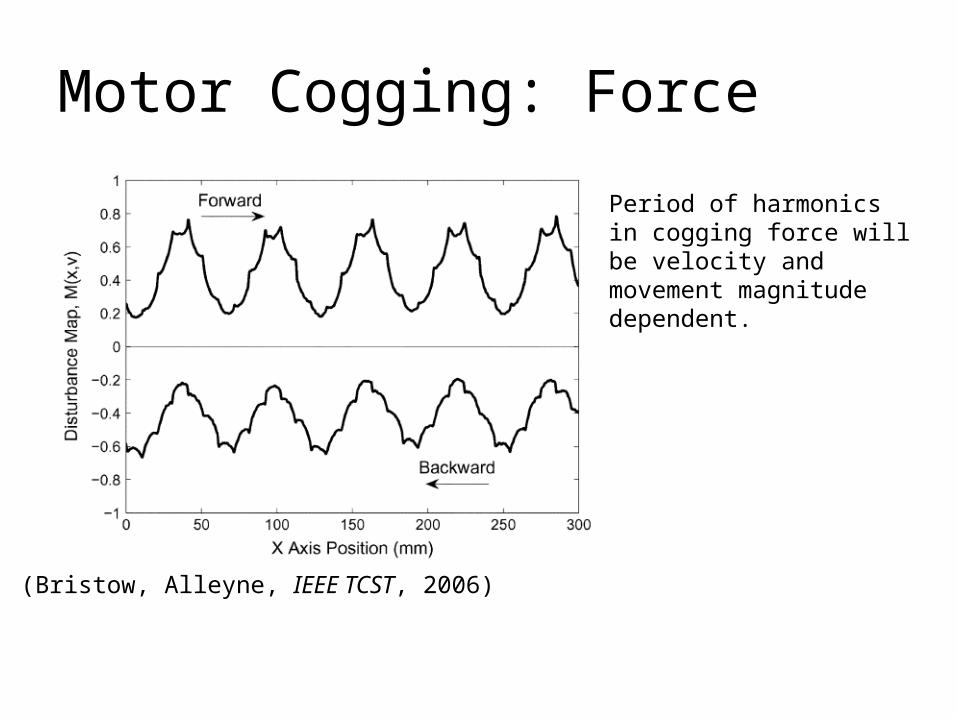
Motor Cogging: Force
(Bristow, Alleyne, IEEE TCST, 2006)
Period of harmonics in cogging force will be velocity and movement magnitude dependent.
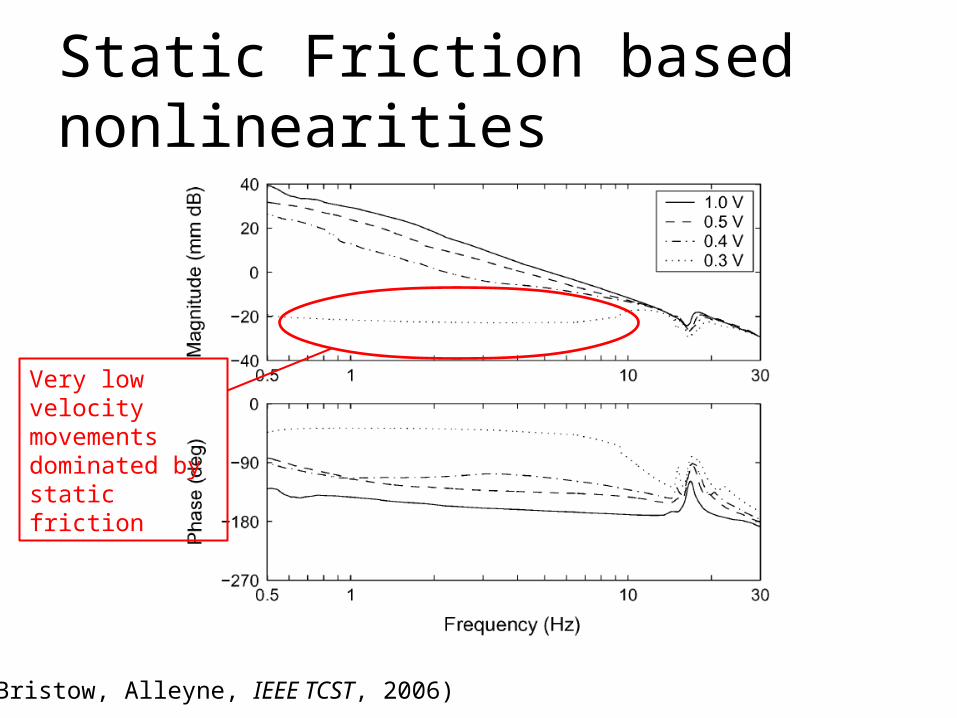
Static Friction based nonlinearities
(Bristow, Alleyne, IEEE TCST, 2006)
Very low velocitymovements dominated by static friction
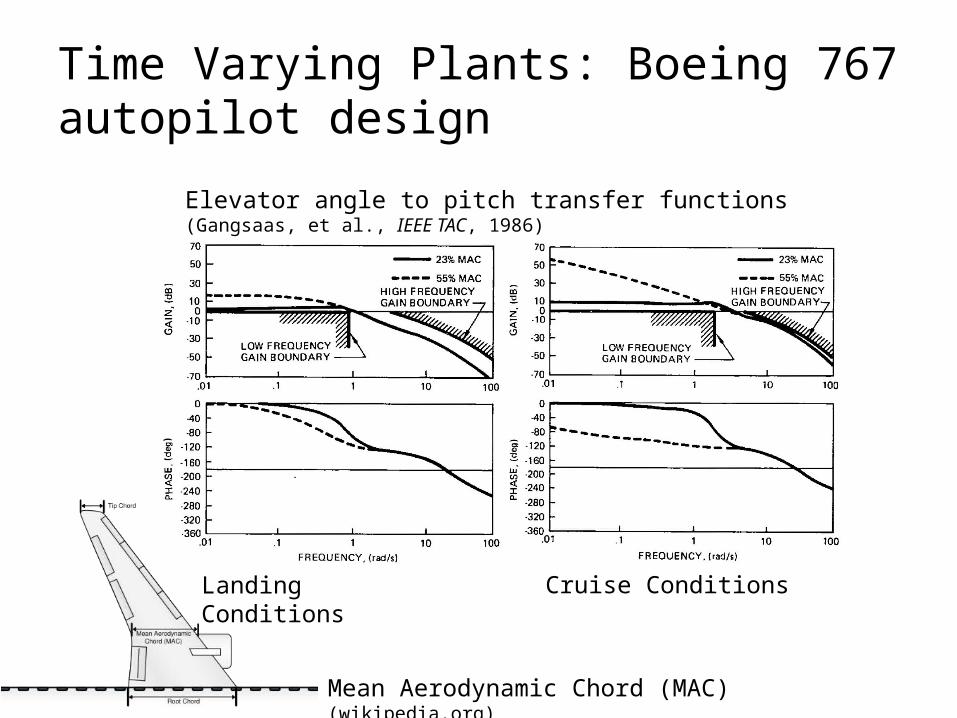
Time Varying Plants: Boeing 767 autopilot design
Landing Conditions Cruise Conditions
Elevator angle to pitch transfer functions (Gangsaas, et al., IEEE TAC, 1986)
Mean Aerodynamic Chord (MAC) (wikipedia.org)
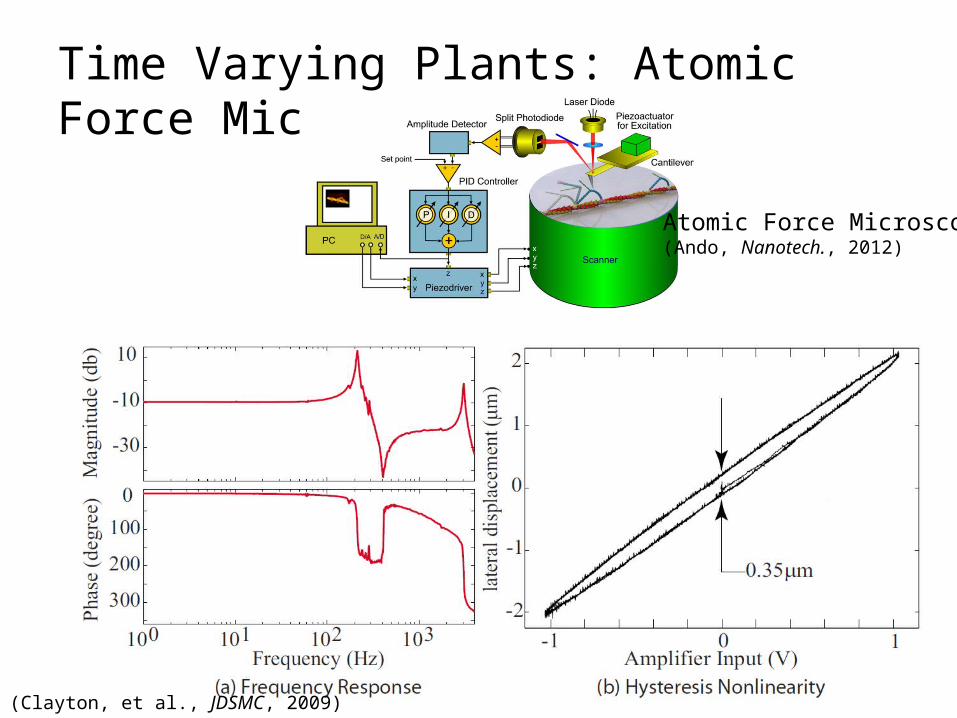
Time Varying Plants: Atomic Force Microscopy
(Clayton, et al., JDSMC, 2009)
Atomic Force Microscopy(Ando, Nanotech., 2012)
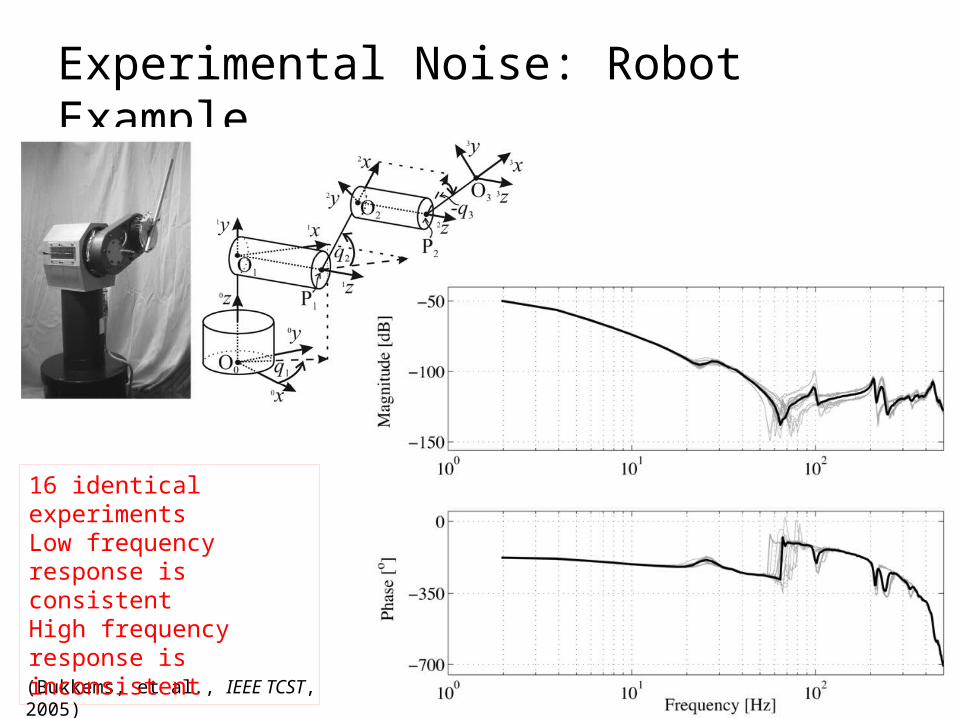
Experimental Noise: Robot Example
(Bukkems, et al., IEEE TCST, 2005)
16 identical experimentsLow frequency response is consistentHigh frequency response is inconsistent
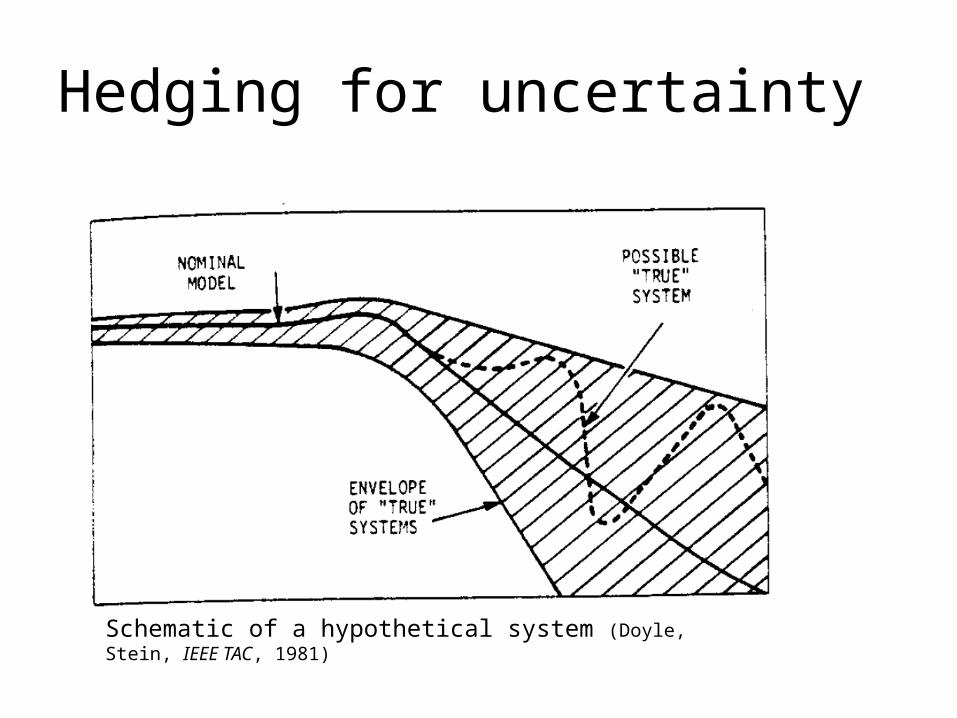
Hedging for uncertainty
Schematic of a hypothetical system (Doyle, Stein, IEEE TAC, 1981)
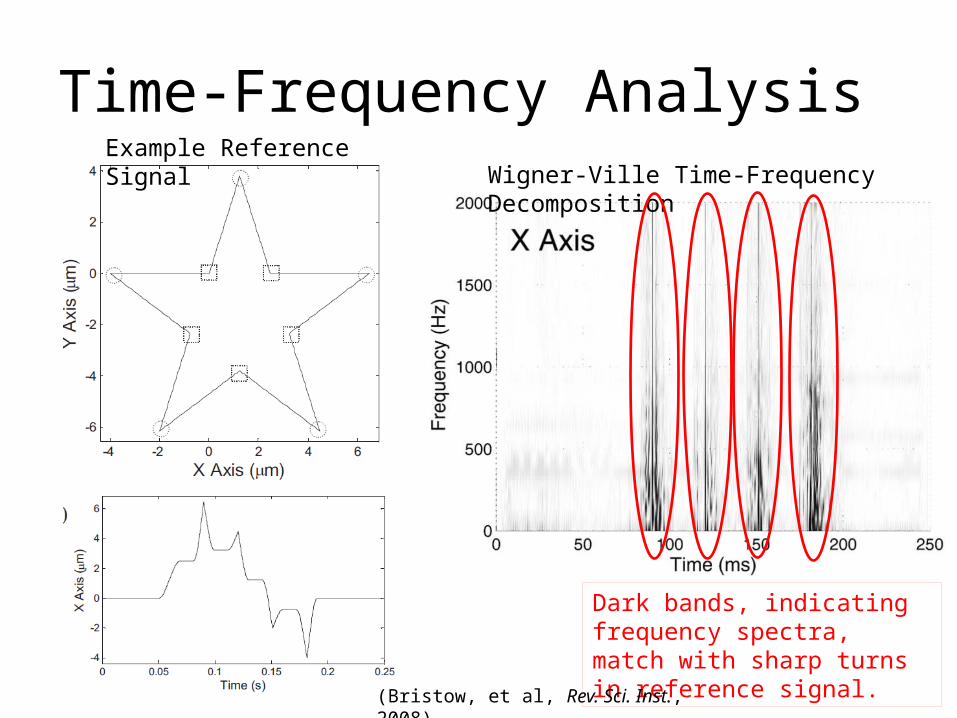
Time-Frequency AnalysisExample Reference Signal
Wigner-Ville Time-Frequency Decomposition
Dark bands, indicating frequency spectra, match with sharp turns in reference signal.
(Bristow, et al, Rev. Sci. Inst., 2008)
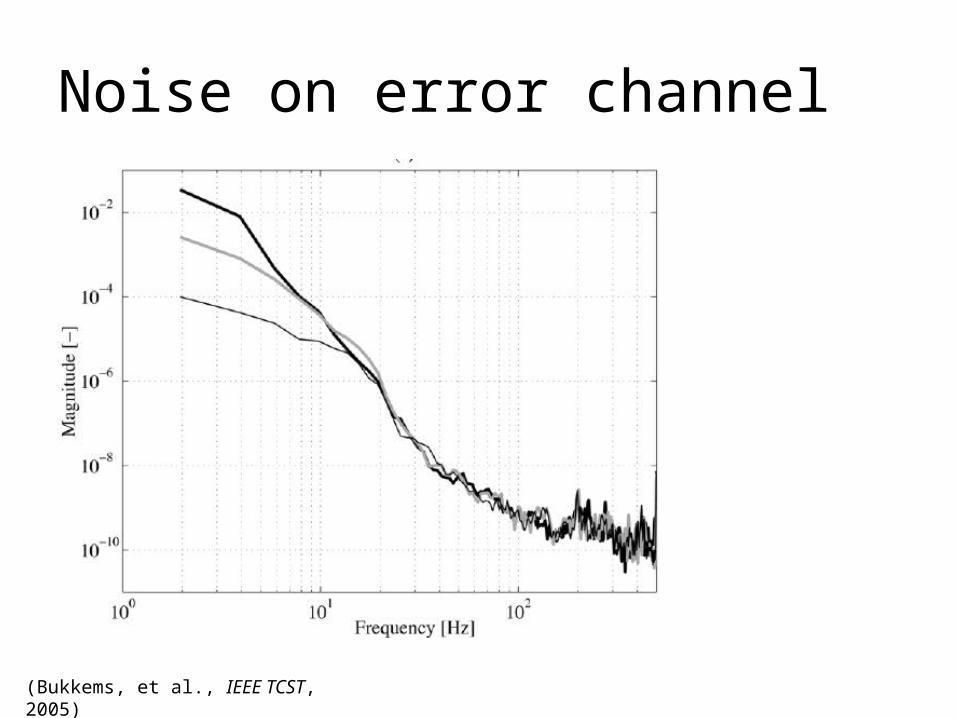
Noise on error channel
(Bukkems, et al., IEEE TCST, 2005)